
USB программатор для микроконтроллеров ATMEL
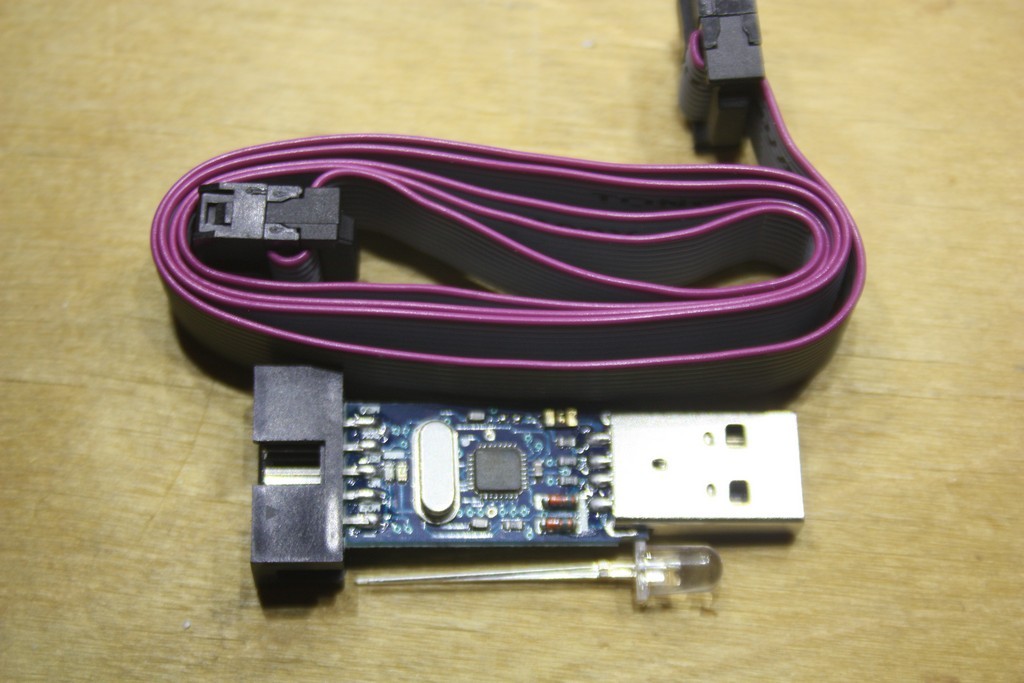
Микроконтроллеры фирмы ATMEL успели завоевать широкую популярность. Их программирование перед применением можно выполнить непосредственно в плате готового устройства через несложный ISP кабель, подключаемый к LPT порту персонального компьютера или кабель чуть посложнее, подключаемый к COM порту. Но в настоящее время всё больше материнских плат выпускается без того и другого, а в ноутбуках LPT исчез уже давно, сменившись интерфейсом USB. Впрочем, под этот интерфейс программаторы тоже существуют и доступны.Для масштаба рядом лежит обычный 5 мм светодиод.
Этот программатор USBASP поддерживает следующие микроконтроллеры:
Список поддерживаемых МК
ATtiny11, ATtiny12, ATtiny13, ATtiny15, ATtiny22, ATtiny2313, ATtiny24, ATtiny25, ATtiny26, ATtiny261, ATtiny28, ATtiny44, ATtiny45, ATtiny461, ATtiny84, ATtiny85, ATtiny861
AT90S1200, AT90S2313, AT90S2323, AT90S2343, AT90S4414, T90S4433, AT90S4434, AT90S8515, AT90S8535
ATmega3250, ATmega329, ATmega64, ATmega640, ATmega644, ATmega645, ATmega6450, ATmega649, ATmega6490, ATmega128, ATmega1280, ATmega1281, ATmega2560, ATmega2561, ATmega103, ATmega406, ATmega8515, ATmega8535
AT90CAN32, AT90CAN64, AT90CAN128
AT90PWM2, AT90PWM2B, AT90PWM3, AT90PWM3B
AT90USB1286, AT90USB1287, AT90USB162, AT90USB646, AT90USB647
AT89S51, AT89S52
AT86RF401
Вместе с программатором поставляется 10-жильный летночный кабель с разъёмами.
Питание программатора берется с USB порта компьютера.
На плате программатора имеется место для распайки LDO стабилизатора напряжения на 3,3В, но сам он не распаян.
Программатор поддерживается программой AVRDUDE. Сама программа консольная, но под неё есть графические оболочки. Утилиту avrdude можно найти в папке /hardware/tools/ в дистрибутиве Arduino IDE или скачать в интернете.
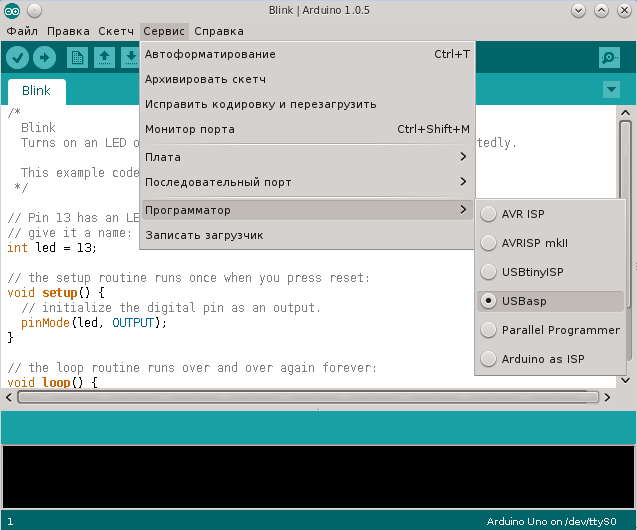
Также программатор поддерживается средой разработки Arduino.
Для программатора существует прошивка под названием AVR-Doper, превращающая его в STK500-совместимый и воспринимаемый фирменной средой разработки ATMEL AVR Studio, но в силу высокой вариативности китайского железа пользоваться ею можно только на свой страх и риск.
AVR. Учебный курс. Трактат о программаторах
Программа для микроконтроллера пишется на любом удобном языке программирования, компилируется в бинарный файл (или файл формата intel HEX) и заливается в микроконтроллер посредством программатора.
Итак, первым шагом в освоении микроконтроллера обычно становится программатор. Ведь без программатора невозможно загнать программу в микроконтроллер и он так и останется безжизненным куском кремния.
Что же представляет из себя это устройство?
В простейшем случае программатор это девайс который связывает микроконтроллер и компьютер, позволяя с компа залить файл прошивки в память контроллера. Также нужна прошивающая программа, которая по специальному протоколу загонит данные в микроконтроллер.
Программаторы бывают разные под разные семейства контроллеров существуют свои программаторы. Впрочем, бывают и универсальные. Более того, даже ту же простейшую AVR’ку можно прошить несколькими способами:
Внутрисхемное программирование (ISP)
Самый популярный способ прошивать современные контроллеры. Внутрисхемным данный метод называется потому, что микроконтроллер в этот момент находится в схеме целевого устройства — он может быть даже наглухо туда впаян. Для нужд программатора в этом случае выделяется несколько выводов контроллера (обычно 3..5 в зависимости от контроллера).
К этим выводам подключается прошивающий шнур программатора и происходит заливка прошивки. После чего шнур отключается и контроллер начинает работу.
- MISO — данные идущие от контроллера (Master-Input/Slave-Output)
- MOSI — данные идущие в контроллер (Master-Output/Slave-Input)
- SCK — тактовые импульсы интерфейса SPI
- RESET — сигналом на RESET программатор вводит контроллер в режим программирования
- GND — земля
Сам же разъем внутрисхемного программирования представляет собой всего лишь несколько штырьков. Лишь бы на него было удобно надеть разъем. Конфигурация его может быть любой, как тебе удобней.
Для внутрисхемной прошивки контроллеров AVR существует не один десяток разнообразных программаторов. Отличаются они в первую очередь по скорости работы и типу подключения к компьютеру (COM/LPT/USB). А также бывают безмозглыми или со своим управляющим контроллером.
Безмозглые программаторы, как правило, дешевые, очень простые в изготовлении и наладке. Но при этом обычно работают исключительно через архаичные COM или LPT порты. Которые найти в современном компьютере целая проблема. А еще требуют прямого доступа к портам, что уже в Windows XP может быть проблемой. Плюс бывает зависимость от тактовой частоты процессора компьютера.
Так что твой 3ГГЦ-овый десятиядерный монстр может пролететь, как фанера над Парижем.
Идеальный компьютер для работы с такими программаторами это какой-нибудь PIII-800Mhz с Windows98…XP.
Вот очень краткая подборка проверенных лично безмозглых программаторов:
- Программатор Громова.
Простейшая схема, работает через оболочку UniProf(удобнейшая вещь!!!), но имеет ряд проблем. В частности тут COM порт используется нетрадиционно и на некоторых материнках может не заработать. А еще на быстрых компах часто не работает. Да, через адаптер USB-COM эта схема работать не будет. По причине извратности подхода 🙂 - STK200
Надежная и дубовая, как кувалда, схема. Работает через LPT порт. Поддерживается многими программами, например avrdude. Требует прямого доступа к порту со стороны операционной системы и наличие LPT порта. - FTBB-PROG.
Очень надежный и быстрый программатор работающий через USB, причем безо всяких извратов. C драйверами под разные операционные системы. И мощной оболочкой avrdude. Недостаток один — содержит редкую и дорогую микросхему FTDI, да в таком мелком корпусе, что запаять ее без меткого глаза, твердой руки и большого опыта пайки весьма сложно. Шаг выводов около 0.3мм. Данный программатор встроен в демоплаты Pinboard
Программаторы с управляющим контроллером лишены многих проблем безмозглых. Они без особых проблем работают через USB. А если собраны на COM порт, то без извращенских методик работы с данными — как честный COM порт. Так что адаптеры COM-USB работают на ура. И детали подобрать можно покрупней, чтобы легче было паять. Но у этих программаторов есть другая проблема — для того чтобы сделать такой программатор нужен другой программатор, чтобы прошить ему управляющий контроллер. Проблема курицы и яйца. Широко получили распространение такие программаторы как:
- USBASP
- AVRDOPER
- AVR910 Protoss
Внутрисхемное программирование, несмотря на все его удобства, имеет ряд ограничений.
Микроконтроллер должен быть запущен, иначе он не сможет ответить на сигнал программатора. Поэтому если неправильно выставить биты конфигурации (FUSE), например, переключить на внешний кварцевый резонатор, а сам кварц не поставить. То контроллер не сможет запуститься и прошить его внутрисхемно будет уже нельзя. По крайней мере до тех пор пока МК не будет запущен.
Также в битах конфигурации можно отключить режим внутрисхемной прошивки или преваратить вывод RESET в обычный порт ввода-вывода (это справедливо для малых МК, у которых RESET совмещен с портом). Такое действо тоже обрубает программирование по ISP.
Параллельное высоковольтное программирование
Обычно применяется на поточном производстве при массовой (сотни штук) прошивке чипов в программаторе перед запайкой их в устройство.
Параллельное программирование во много раз быстрей последовательного (ISP), но требует подачи на RESET напряжения в 12 вольт. А также для параллельной зашивки требуется уже не 3 линии данных, а восемь + линии управления. Для программирования в этом режиме микроконтроллер вставляется в панельку программатора, а после прошивки переставляется в целевое устройство.
Для радиолюбительской практики он особо не нужен, т.к. ISP программатор решает 99% насущных задач, но тем не менее параллельный программатор может пригодиться. Например, если в результате ошибочных действий были неправильно выставлены FUSE биты и был отрублен режим ISP. Параллельному программатору на настройку FUSE плевать с высокой колокольни. Плюс некоторые старые модели микроконтроллеров могут прошиваться только высоковольтным программатором.
- HVProg от ElmChan
- Paraprog
- DerHammer
А также есть универсальные вроде TurboProg 6, BeeProg, ChipProg++, Fiton которые могут прошивать огромное количество разных микроконтроллеров, но и стоят неслабо. Тысяч по 10-15. Нужны в основном только ремонтникам, т.к. когда не знаешь что тебе завтра притащат на ремонт надо быть готовым ко всему.
Прошивка через JTAG
Вообще JTAG это отладочный интерфейс. Он позволяет пошагово выполнять твою программу прям в кристалле. Но с его помощью можно и программу прошить, или FUSE биты вставить. К сожалению JTAG доступен далеко не во всех микроконтроллерах, только в старших моделях в 40ногих микроконтроллерах. Начиная с Atmega16.
Компания AVR продает фирменный комплект JTAG ICEII для работы с микроконтроллерами по JTAG, но стоит он (как и любой профессиональный инструмент) недешево. Около 10-15тыр. Также есть первая модель JTAG ICE. Ее можно легко изготовить самому, а еще она встроена в мою демоплату Pinboard.
Прошивка через Bootloader
Многие микроконтроллеры AVR имеют режим самопрошивки. Т.е. в микроконтроллер изначально, любым указанным выше способом, зашивается спец программка — bootloader. Дальше для перешивки программатор не нужен. Достаточно выполнить сброс микроконтроллера и подать ему специальный сигнал. После чего он входит в режим программирования и через обычный последовательный интерфейс в него заливается прошивка. Подробней описано в статье посвященной бутлоадеру.
Достоинство этого метода еще и в том, что работая через бутлоадер очень сложно закосячить микроконтроллер настолько, что он не будет отвечать вообще. Т.к. настройки FUSE для бутлоадера недоступны.
Бутлоадер также прошит по умолчанию в главный контроллер демоплаты Pinboard чтобы облегчить и обезопасить первые шаги на пути освоения микроконтроллеров.
Pinboard II
Прошивка AVR с помощью демоплаты Pinboard II (для Pinboard 1.1 все похоже)
Простой внутрисхемный программатор ARM микроконтроллеров серии LPC своими руками. Схемотехника. Часть первая
В последнее время, как среди профессиональных разработчиков, так и в рядах начинающих электронщиков широкое распространение получили ARM микроконтроллеры. Очень большой популярностью пользуются разработки фирмы NXP. Эта фирма производит огромный спектр изделий – от дешёвых и малопотребляющих до высокопроизводительных, поддерживающих такие интерфейсы как USB и Ethernet.Хочу предложить вниманию читателей свою разработку, которой лично я пользуюсь, пожалуй, чаще всего. Это простой внутрисхемный программатор, который легко можно изготовить собственными руками. Программатор предназначен для программирования широкораспространённых ARM микроконтроллеров фирмы NXP серии LPC2xxx. Это микроконтроллеры с ядрами ARM7, Cortex-M0 и Cortex-M3. Кроме этого, с его помощью можно программировать недорогие 8-битные микроконтроллеры из серии LPC9xx, за исключением самых простейших из серии LPC901.
Подробнее со списком можно ознакомиться здесь.
www.ru.nxp.com/products/microcontrollers
Программатор подключается к порту USB и не требует дополнительного питания. Он собран всего на двух микросхемах и одном транзисторе.
Устройство может использоваться не только для программирования платы с микроконтроллером, но и для связи с ней по эмулируемому последовательному порту.
Рис. 1. Схема принципиальная электрическая, часть первая.
Программатор собран на основе микросхемы фирмы FTDI – FT232RL
www.ftdichip.com/Products/ICs/FT232R.htm
Для успешного программирования не забудьте скачать и установить драйвер микросхемы, который подходит для применяемой Вами операционной системы.
Ищите его здесь:
www.ftdichip.com/FTDrivers.htm
Фильтр L1 можно заменить на резистор сопротивлением 10 … 22 Ом.
Светодиоды VD1, VD3, сопротивления R3, R4 можно исключить, если не требуется индикация передачи и приёма пакетов данных по USB.
Рис. 2. Схема принципиальная электрическая, часть вторая.
Для программирования микроконтроллеров серии LPC2000 используется разъём X3, для программирования LPC900 X1.
Рис. 3. Схема принципиальная электрическая, часть вторая для программирования микроконтроллеров только серии LPC2000.
Микроконтроллеры серии LPC900 используются не часто, если Вам требуется программировать только ARMы LPC2000 вторую часть схемы можно очень сильно упростить. Упрощённая часть показана на рисунке 3.
Рис.4. Монтажная схема.
Рис.5. Внешний вид программатора.
В качестве светодиодов можно применить как SMD, так и выводные.
В качестве транзистора подойдёт практически любой, прямой проводимости, подходящий по цоколёвке.
Список используемых деталей, схема и трассировки платы в формате PCAD 2006, расположены в прилагаемом архиве.
docs.google.com/open?id=0B8EEcNDjnzhhUUZJbjc2cEx3NHM
Программирование можно производить с помощью бесплатно распространяемой программы Flash Magic
www.flashmagictool.com
Подробнее о подключении разных микроконтроллеров к программатору и процессе внутрисхемного программирования я расскажу в следующем посте.
описание USBASP драйвера, инструкция по настройке своими руками в AvrDude Prog, Atmel Studio и Khazama AVR Programmer, обновление проши
В моём случае это абсолютный рекордсмен по скорости доставки — около 5 месяцев беспечного блуждания непонятно где. Несмотря на чудовищную задержку по времени, пакет я всё-таки получил, чему несказанно рад, не взирая на недочёты, о коих поведаю ниже. Поскольку у меня весьма плохая память, то нужно было объединить найденную полезную информацию где-то в одном месте в виде памятки, собирать её по крупицам в разных закоулках сети оказалось делом нетривиальным, поэтому оформлю всё это отдельным постом.USB ISP — самый дешёвый программатор контроллеров AVR, что можно найти в продаже, брался для расширения кругозора и более углубленного изучения AVR.
Обзор в себя включает: описание программатора, как его подключить к чипу, настройку его работы в программах AvrDude Prog, Khazama, Atmel Studio 7, и не только это.
Конечно вместо него можно использовать Arduino UNO с прошитым в него скетчем ArduinoISP, но это не удобно, возня с проводами, особенно если UNO всего одна, отбивает энтузиазм. Проще было заиметь отдельно такой программатор, точнее два. По двум причинам:
1) Ещё перед покупкой уже из отзывов было понятно, что качество пайки этих устройств страдает, а некоторым ещё и с расколотыми стабилитронами они приходили. Решено было подстраховаться, заказав два.
2) Один программатор к тому же можно шить другим, переставив перемычку на ведомом устройстве.
Технические характеристики
Поддерживаемые ОС: Windows, MacOS, LinuxПроцессор: Atmega8A
Интерфейс подключения к ПК: USB
Интерфейс программирования: ISP (внутрисхемное)
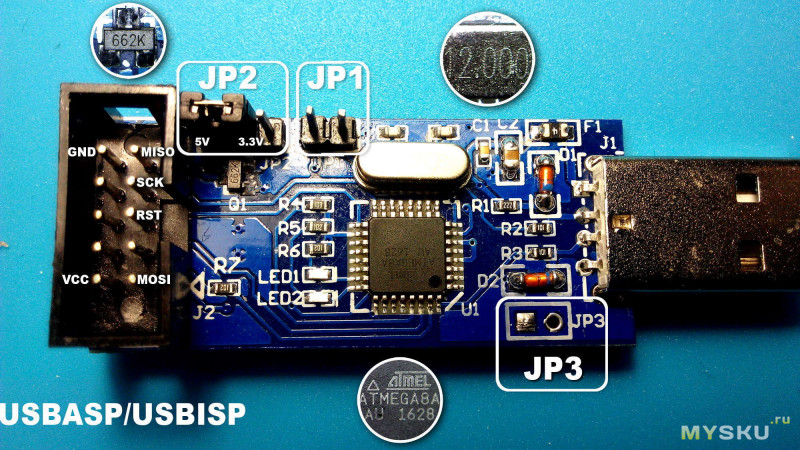
Напряжение программирования: 5В или 3.3В (в зависимости от положения перемычки JP2)
Частота программирования: 375кГц (по умолчанию) и 8кГц (при замкнутой перемычке JP3)
Поддерживаемые контроллеры: все AVR с интерфейсом SPI
Описание: ссылка
Список поддерживаемых микроконтроллеров
ATmega серия
ATmega8 ATmega48 ATmega88 ATmega168 ATmega328ATmega103 ATmega128 ATmega1280 ATmega1281 ATmega16
ATmega161 ATmega162 ATmega163 ATmega164 ATmega169
ATmega2560 ATmega2561 ATmega32 ATmega324 ATmega329
ATmega3290 ATmega640 ATmega644 ATMEGA64 ATmega649
ATmega6490 ATmega8515 ATmega8535
Tiny серия
ATtiny12 ATtiny13 ATtiny15 ATtiny26 ATTINY25ATtiny45 Attiny85 ATtiny2313
Серия Classic
AT90S1200 AT90S2313 AT90S2333 AT90S2343 AT90S4414AT90S4433 AT90S4434 AT90S8515
AT90S8535
CAN серия
AT90CAN128PWM серия
AT90PWM2 AT90PWM3Внешний вид
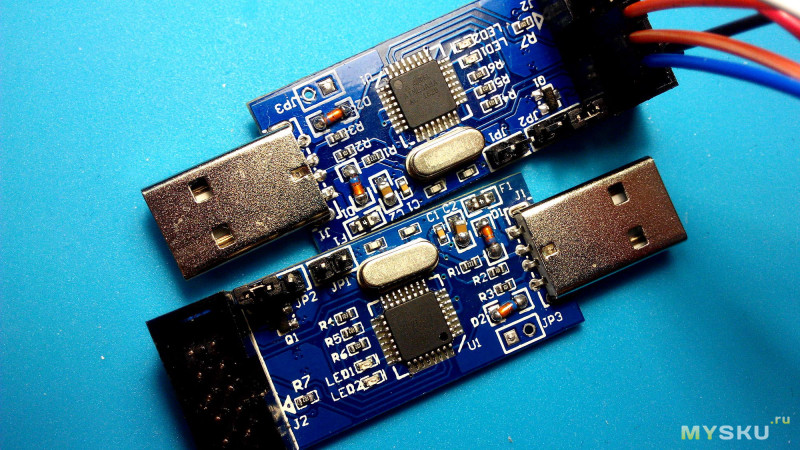
Комплект поставки минимальный — программатор + шлейф без резинки. В моём случае в удвоенном количестве.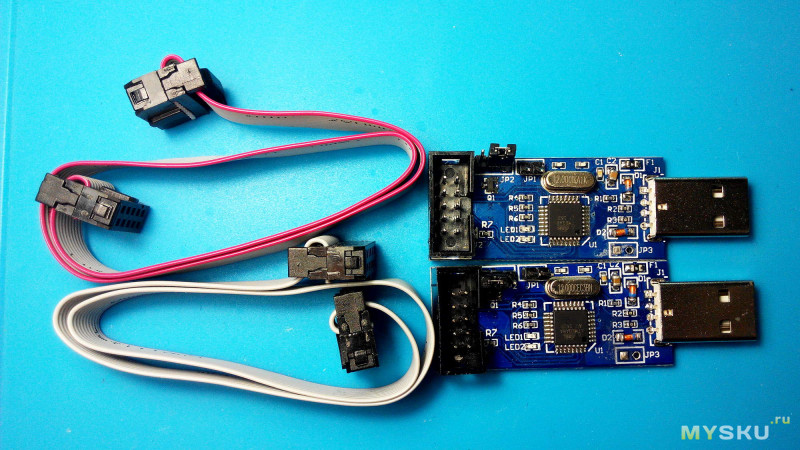
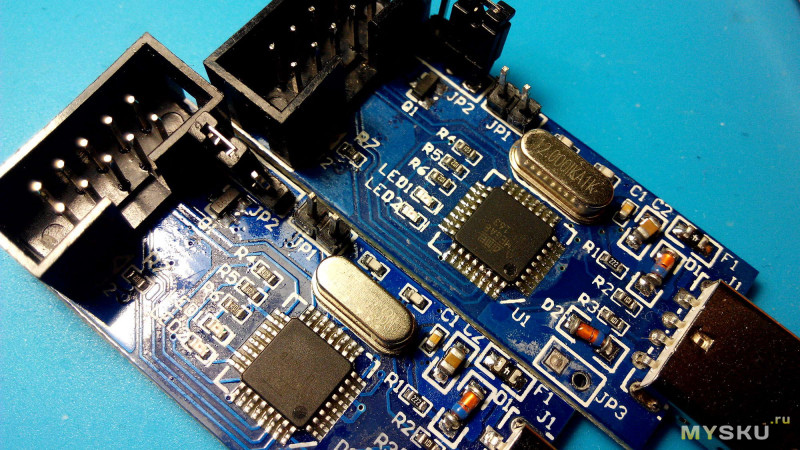
Культура исполнения и вправду хромает, мне в глаза сразу бросились криво припаянные гребёнки. Везде где только можно — имеются следы флюса, причём с окислами, по всей видимости, программаторы давно валялись на складе, а сборка их производилась с присущей китайцам быстротой.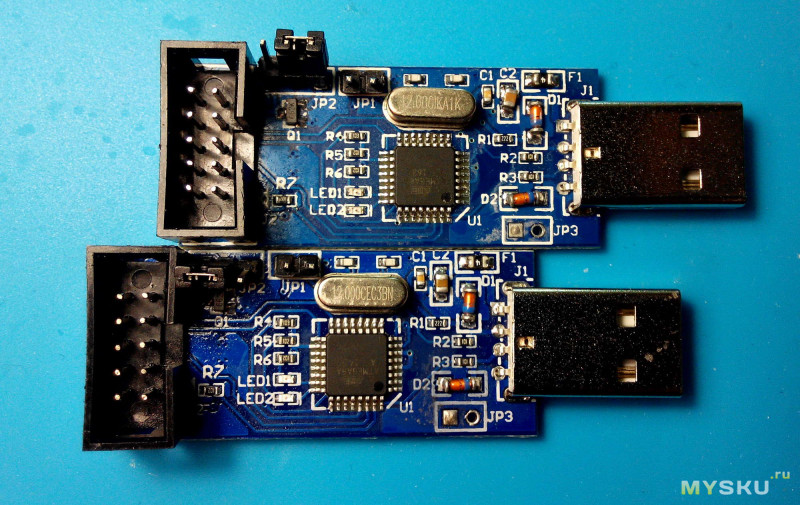

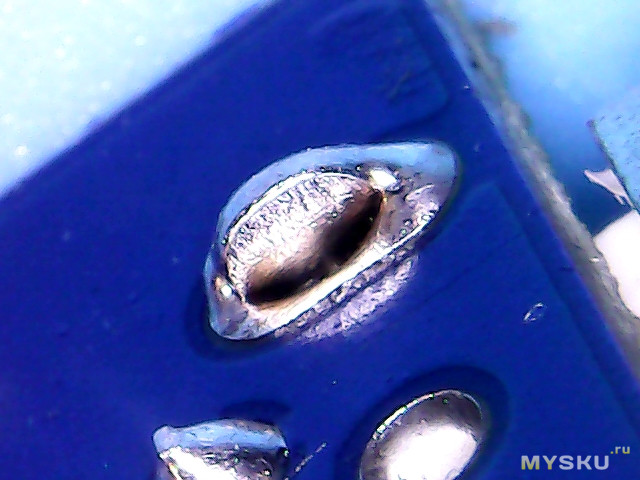
Некоторые отверстия не целиком заполнены припоем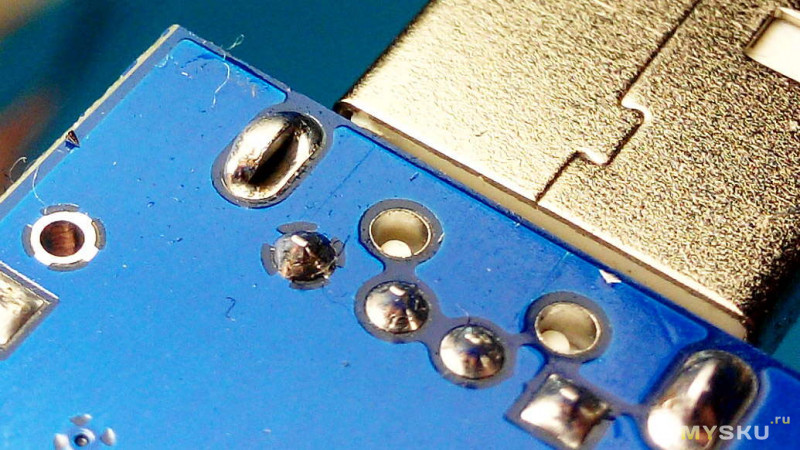
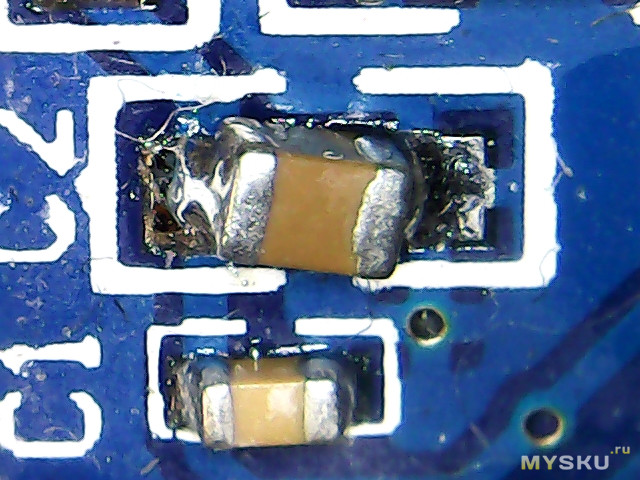
SMD-элементы тоже криво припаяны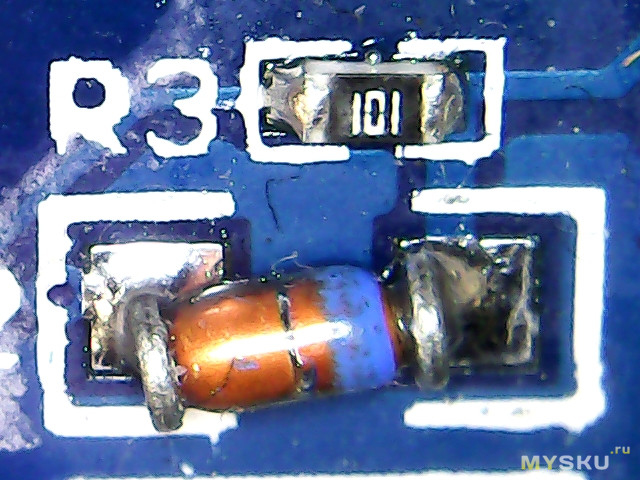
Гребёнку чуть позже выровнял, уж больно неприятно на такую раскосую смотреть, элементы пропаял, а плату затем отмыл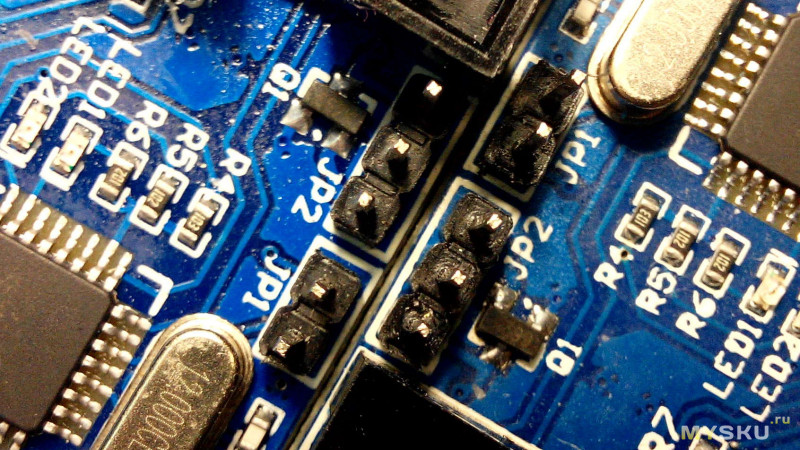
Размеры платы несколько больше USB-TTL-конвертера на CP2102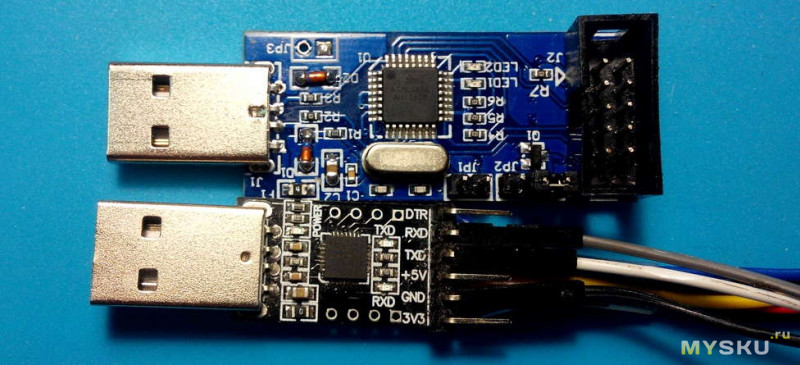
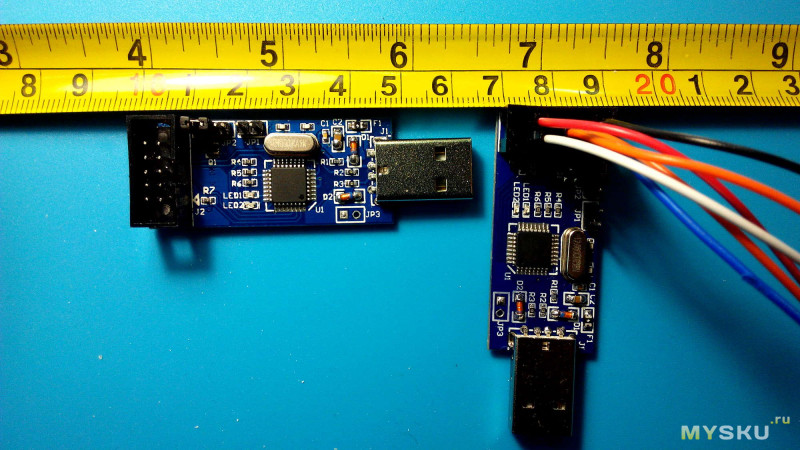
Длина шлейфа около 30см, бытует мнение, что чем короче шлейф, тем лучше. Некоторые его специально укорачивают. Если заказать оригинальный USBASP — там комплектный шлейф уже 50см.

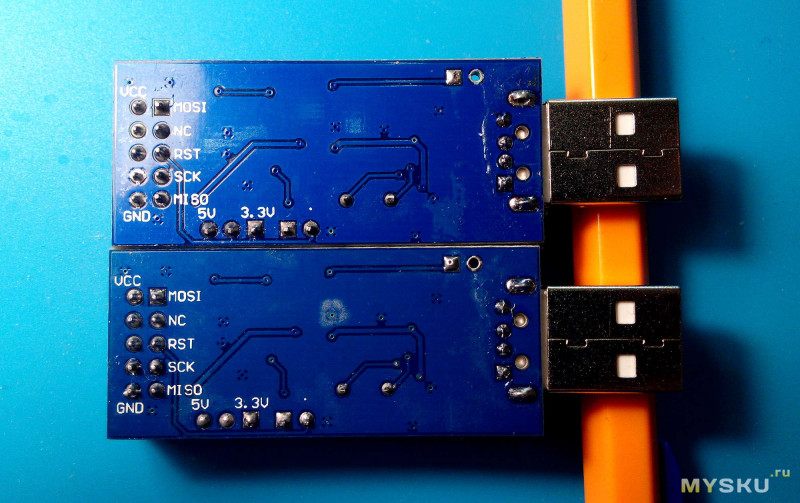
Органы управления на плате
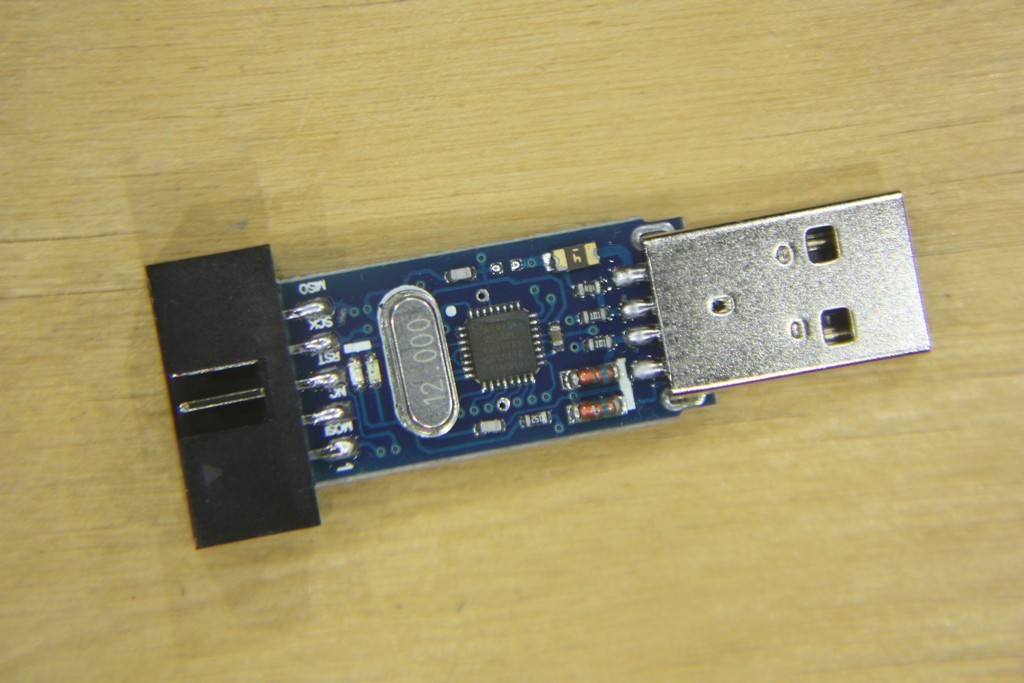
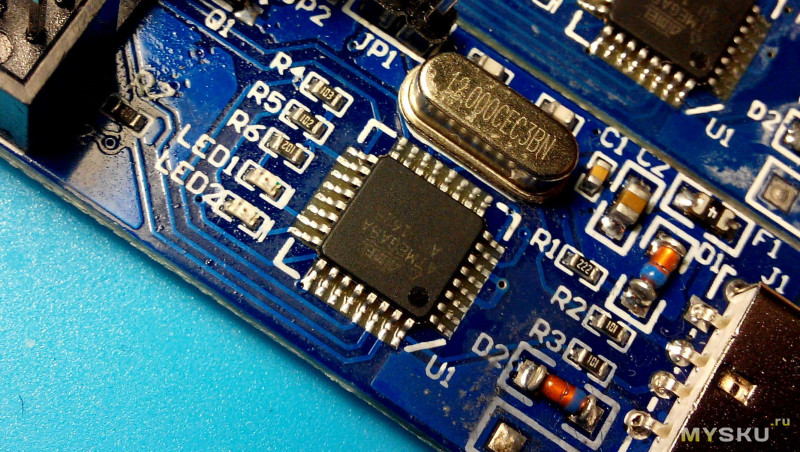
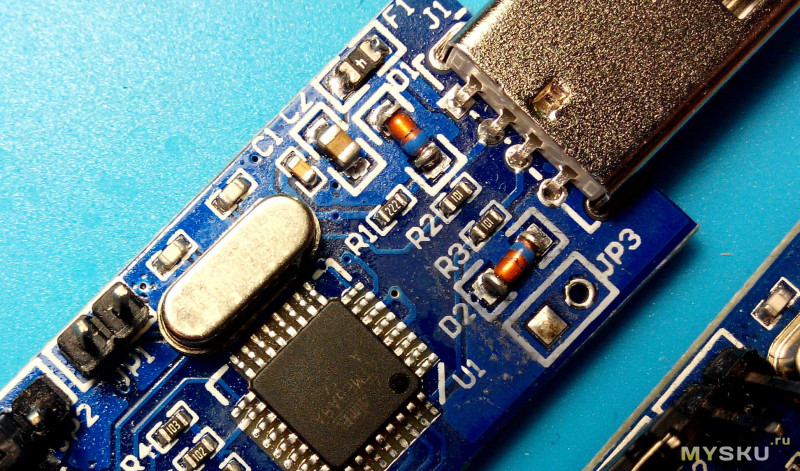
На плате имеются три перемычки, задающие разные режимы работы программатора:JP1 — замыкается в случае обновления прошивки самого программатораПрограмматор, как можно заметить, построен на базе Atmega8 с кварцем на 12МГц. Самый правый верхний элемент, подписанный F1, с перевёрнутой цифрой 4 — самовосстанавливающийся предохранитель, защищает USB-порт ПК/ноутбука, если на прошиваемой плате вдруг произошло короткое замыкание. Под перемычкой JP2 находится LDO-стабилизатор 662К, понижающий напряжение с 5В до 3.3В, если перемычка установлена в правое положение.
JP2 — тройная перемычка, здесь выбирается, какое напряжение будет подаваться на прошиваемый микроконтроллер, либо 5В (левое положение) и 3.3В (правое положение)
JP3 — если её замкнуть, то программирование контроллера будет происходить с пониженной частотой, однако китайцы не стали сюда впаивать гребёнку, т.к. на данной прошивке она не требуется
Установка драйверов
Чтобы начать пользоваться программатором, необходимо сперва поставить на него драйвера. Вставляю любой программатор в USB-порт ПК, звучит сигнал о новом оборудовании, на самом девайсе горит светодиод, но автоматического поиска драйверов не происходит.примечание. перед установкой драйвера необходимо отключить проверку цифровой подписи в Windows1) Скачать драйвера, распаковать в удобное место.
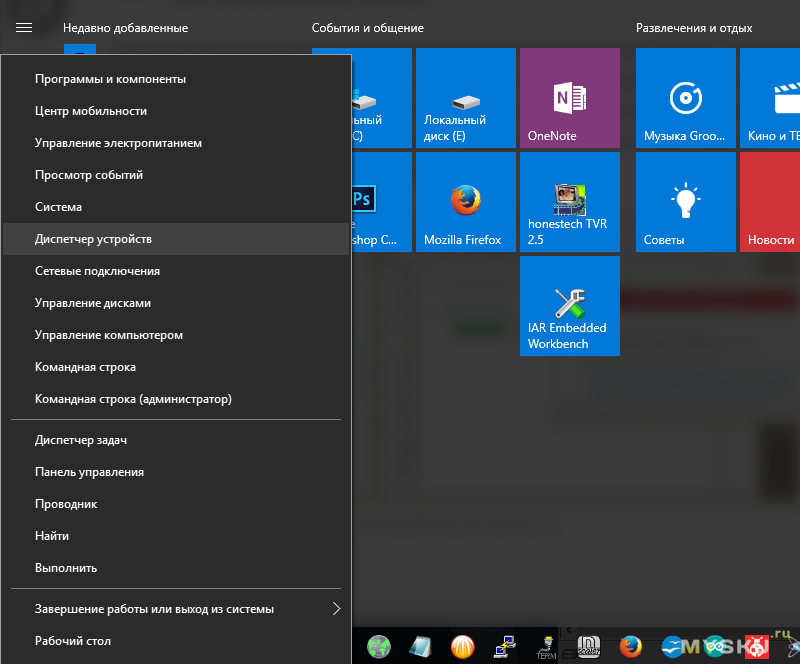
2) Зайти в «Диспетчер устройств», например навести курсор на главную кнопку (Win10), нажать ПКМ и выбрать пункт «Диспетчер устройств».
3) В ветке «Другие устройства» можно увидеть неопознанное устройство USBASP с оранжевым треугольничком — > навести на него курсор, нажать ПКМ -> «Обновить драйверы…»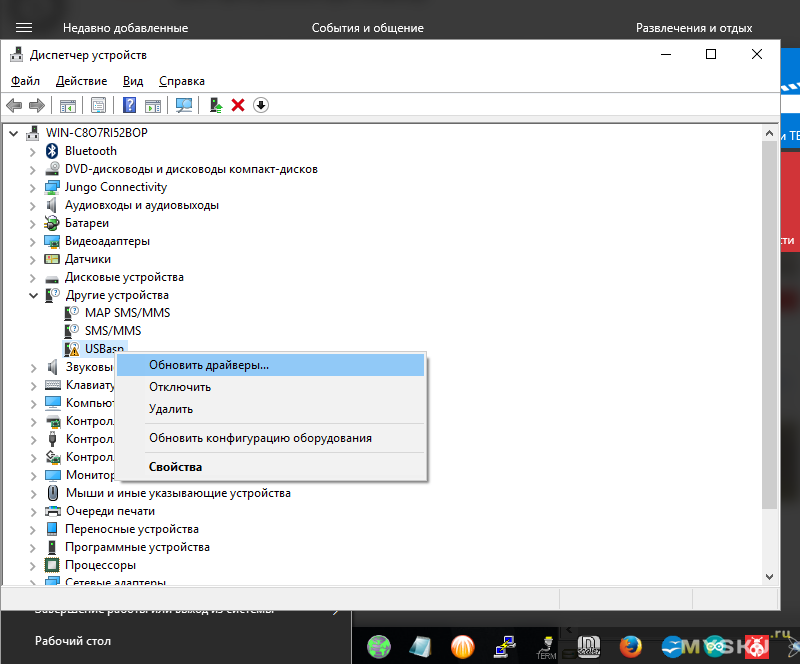
4) Указать путь до раннее распакованной папки с драйверами — «libusb_1.2.4.0», нажать «ОК»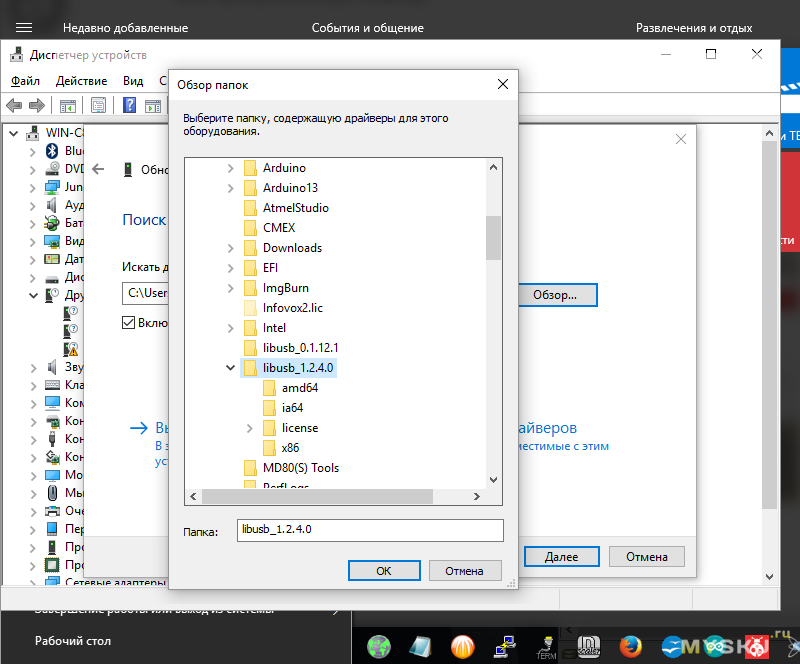
5) «Всё равно установить этот драйвер»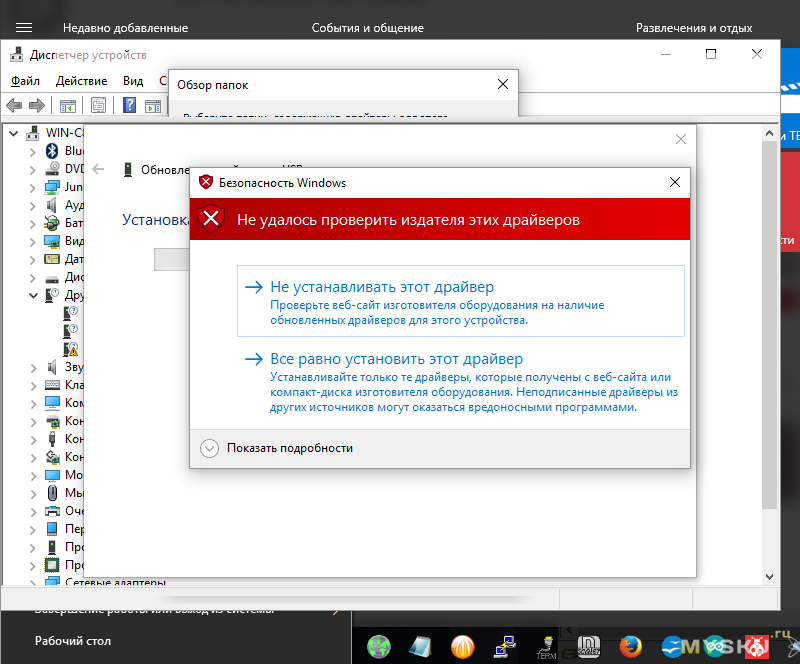
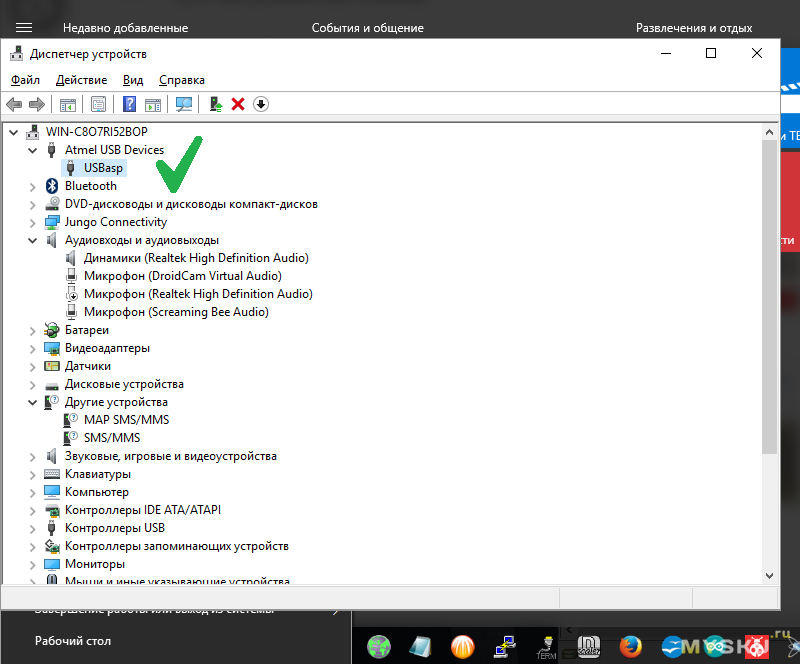
6) Готово, теперь оранжевый треугольничек пропал, драйвера поставлены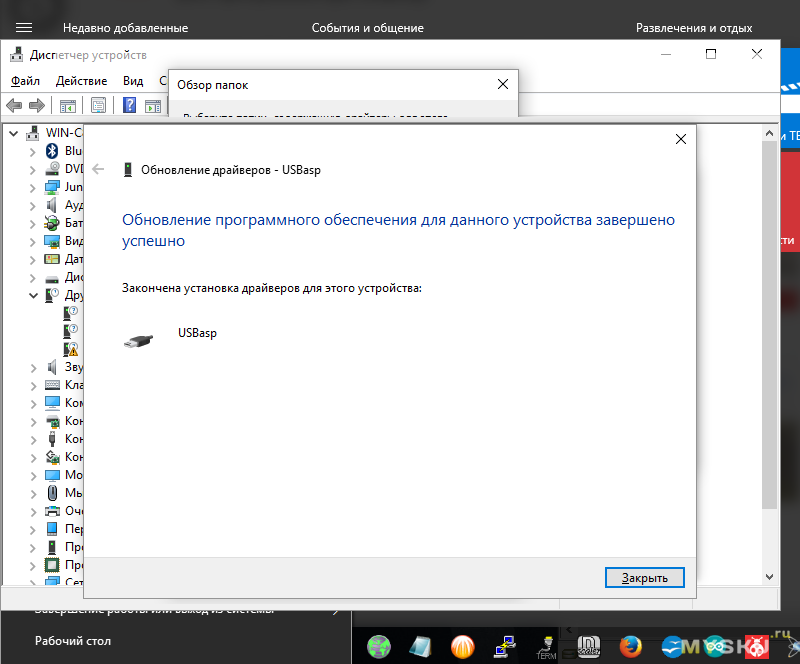
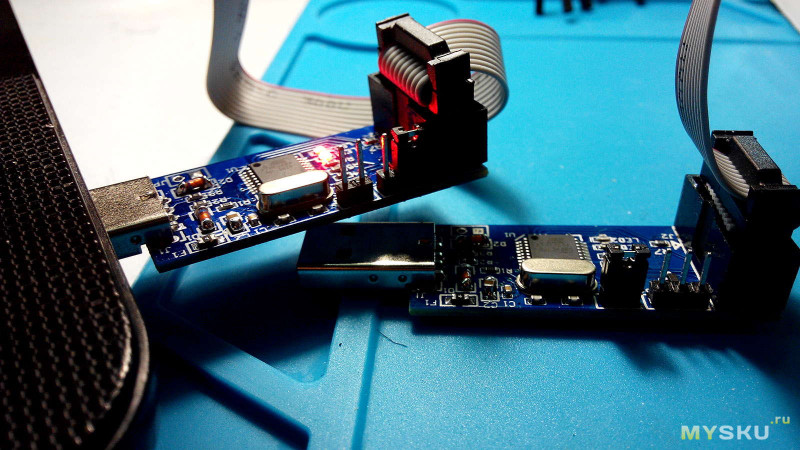
Прошивка собрата
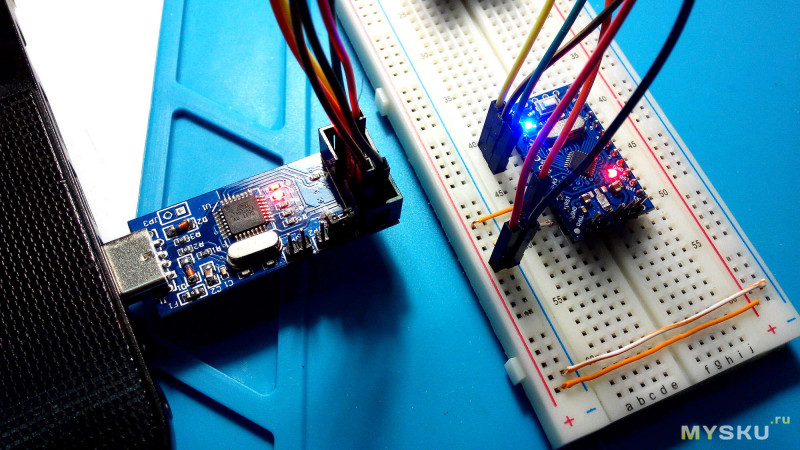
Мне уже было известно до этого, что китайцы продают эти программаторы с не самой свежей прошивкой. Решил сперва обновить прошивку на одном из них, а затем ради интереса сравнить оба программатора в работе. Для этого соединяю шлейфом оба устройства, на ведущем (который вставляю в USB-порт) никакие перемычки не трогаются, а на ведомом программаторе (на котором будем обновлять прошивку) я переставил перемычку с JP2 на JP1: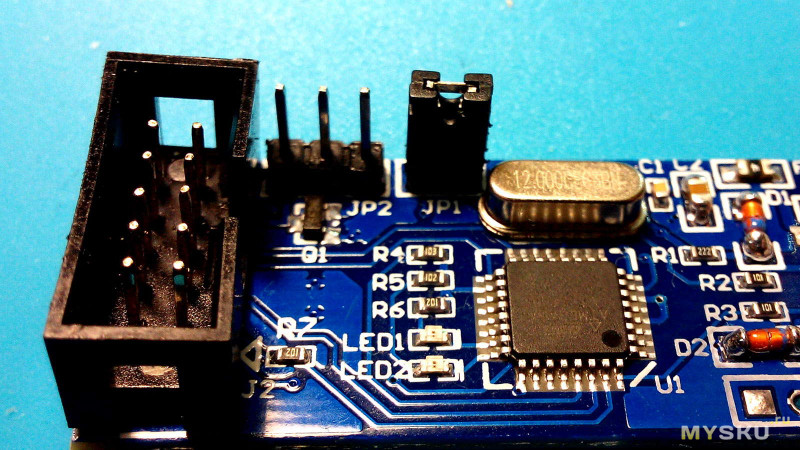
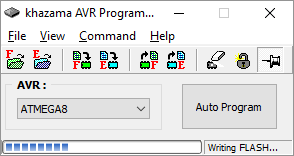
Захожу в программу Khazama AVR Programmer, выбираю из выпадающего списка ATmega8 и сперва считаю Flash-память через пункт меню «Command» -> «Read FLASH to Buffer», чтобы cохранить китайскую заводскую прошивку у себя. На всякий случай.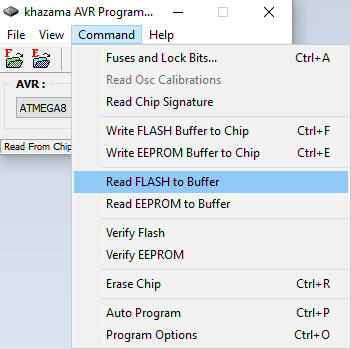
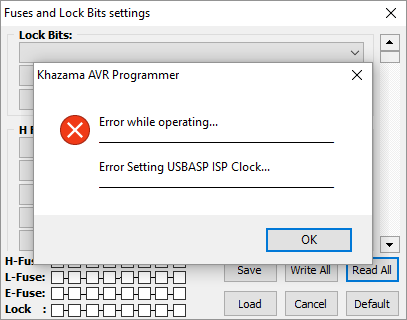
При этом периодически будет выпадать такая ошибка, закрыв окно, программа продолжит работу.
Идёт считывание, которое завершается всплывающим окном об успешном считывании FLASH-памяти в буфер
Теперь нужно сохранить содержимое буфера: «File» -> «Save FLASH Buffer As…». Выбрать удобное место, куда старая прошивка сохранится, дать имя (я например её назвал firmware_1) и дописать расширение *.hex — если его не писать, то она сохранится как просто файл без расширения.
Скачиваю прошивку для программатора с этой странички, архив usbasp.2011-05-28.tar.gz (в этом же архиве есть драйвера для Windows, распаковываю содержимое в удобное место.
Тем временем в Khazama загружу скачанную прошивку в буфер. «File» -> «Load FLASH File to Buffer». Выбираю прошивку, где в названии написано atmega8, поскольку прошиваемый программатор на этом чипе.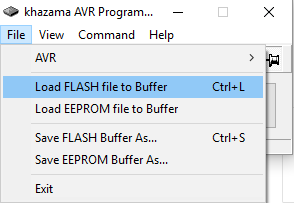
Как видно, здесь три прошивки — для Atmega8, 48 и 88. В нашем случае Atmega 8 — её и выбираю.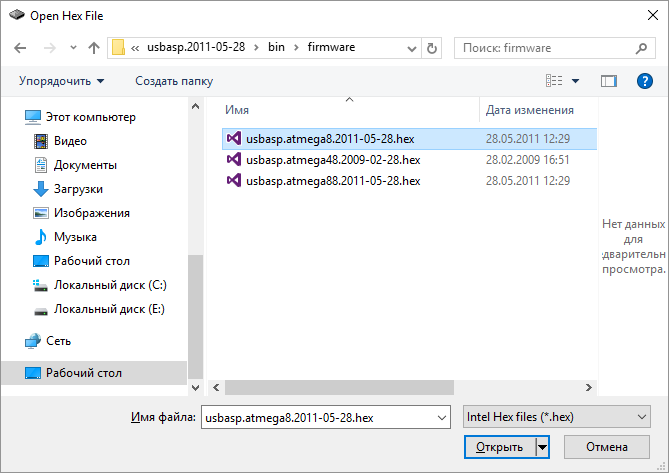
Прошиваю. «Command» -> «Write FLASH File to Buffer». Снова возникает ошибка, но после идёт процесс, завершающийся успехом.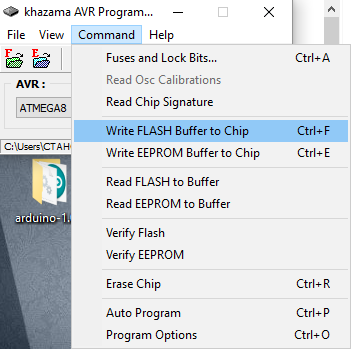
Поскольку в обычном понимании «запрограммировать» означает выставить 1, то при работе со фьюзами всё ровно наоборот, от чего возникает путаница и в этом случае можно по неосторожности заблокировать контроллер и прошить потом его будет уже нельзя. Программа Khazama AVR Programmer удобна просмотром фьюз-битов — там наглядно видно и расписано, какие из них установлены, а какие нет. 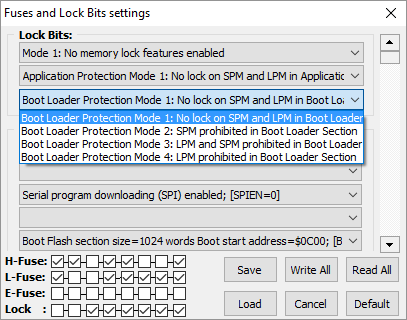
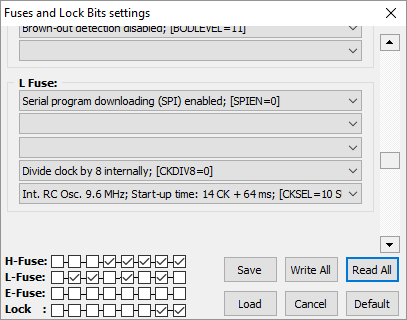
Находятся они по пути «Command» -> «Fuses and Lock Bits…», откроется окно: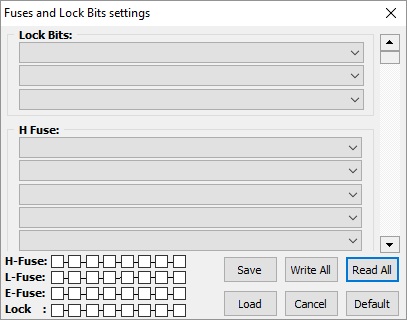
Где по нажатии кнопки «Read All» считаются фьюз- и лок-биты, а пресловутая ошибка успеет вылезти аж 5 раз подряд. Ошибки сыпятся именно на заводской китайской прошивке. Но если вставить в USB-порт недавно прошитый программатор, прошивкой скаченной по ссылке выше, то этих ошибок вылазить уже не будет, однако баги вылезут в другом месте, но о них позже.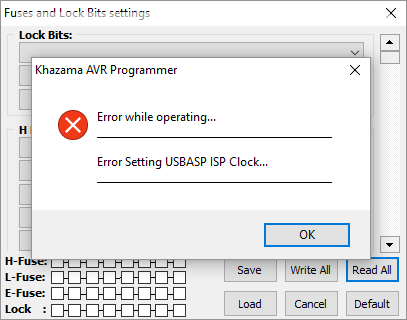
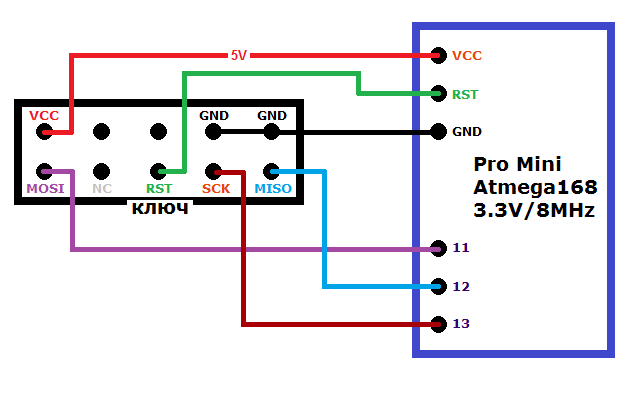
Связь с платой Pro Mini (Atmega 168, 3.3V/8MHz)
В этом случае выводы программатора соединяются с выводами платы Pro Mini, как проиллюстрировано на схематичном рисунке ниже. Перемычки не переставляются, т.е. остаётся в положении 5В.Несмотря на то, что плата Pro Mini подписана как 3.3В, на 168-ю Атмегу можно подавать и 5В. Стабилизатор AMS1117 на 3.3В кстати вообще выпаян из платы.
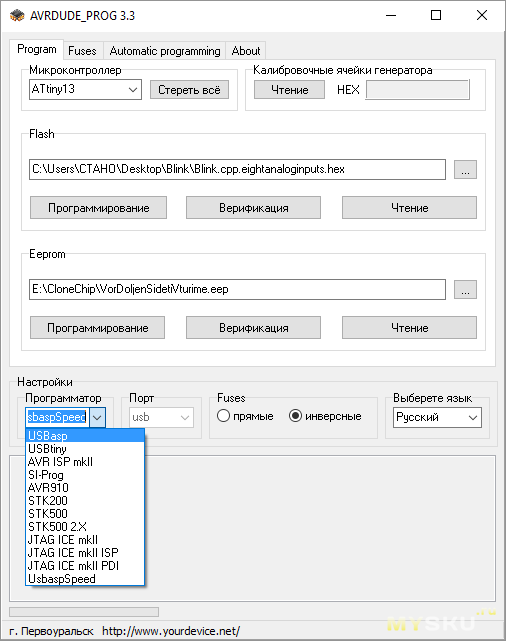
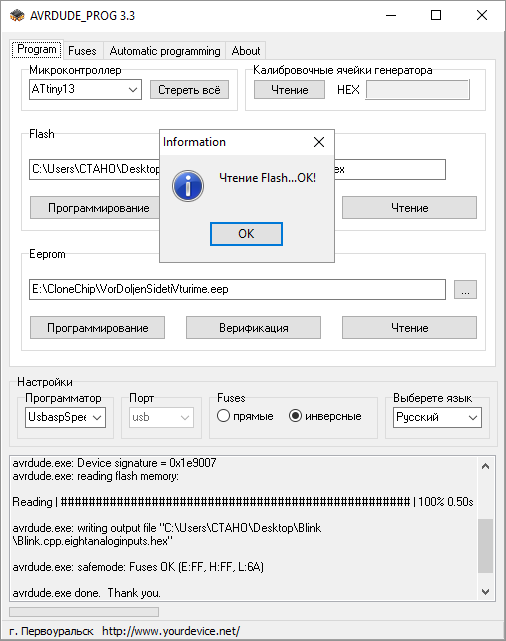
AVRDUDE PROG 3.3
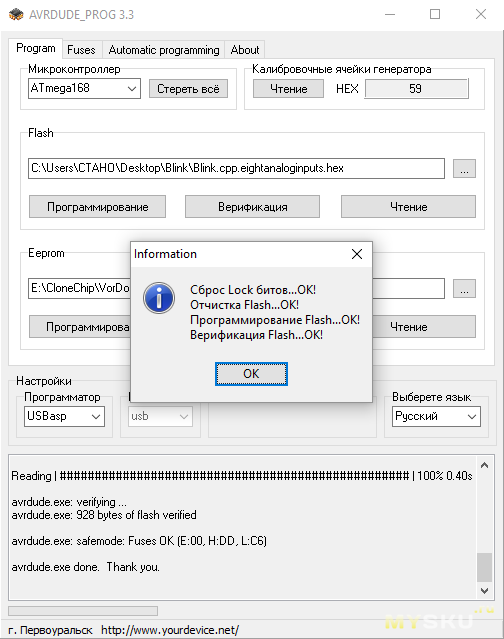
Консольная программа для прошивки микросхем, своего графического интерфейса не имеет, в стоке работает из командной строки, но энтузиастами было написано немало оболочек на неё, для удобства работы с ней. Одна из таких оболочек называется AVRDUDE PROG, созданная русскоязычными разработчиками. Эта оболочка, на мой взгляд удобна как раз для Flash-перепрошивки МК. После её запуска выбирается контроллер, в данном случае Atmega168 и тип программатора — USBasp. После чего можно заниматься записью/считыванием памяти. Что на заводской прошивке, что на новой — в обоих случаях никаких проблем с общением с Atmega168 не возникло. Прошил ради интереса ардуиновский стандартный blink-скетч, экспортированный в бинарный HEX-файл. Всё гладко.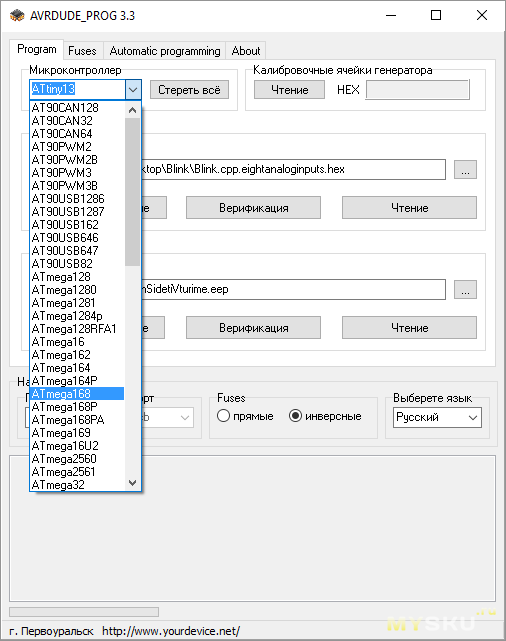
Khazama AVR Programmer
Здесь достаточно выбрать микроконтроллер из выпадающего списка и можно уже работать с памятью/битами.
Однако если на самом программаторе установлена заводская прошивка, периодически будут сыпаться ошибки, о чём выше уже было упомянуто, на новой прошивке — данных ошибок уже нет.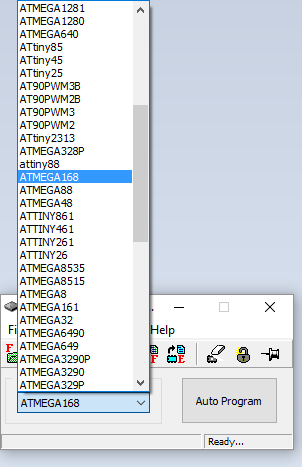
Связь с контроллером ATtiny13A в корпусе SOIC8
Соединение согласно схеме ниже. Но тут всё немного интереснее.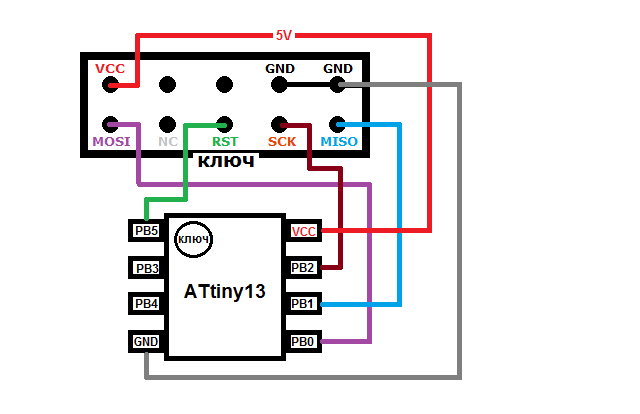
Поскольку голый чип в SMD-корпусе SOIC8, в данном случае я поместил его в переходник SOIC8-DIP8 для удобства соединения с программатором в дальнейшем. Обзор на этот переходник можно почитать здесь.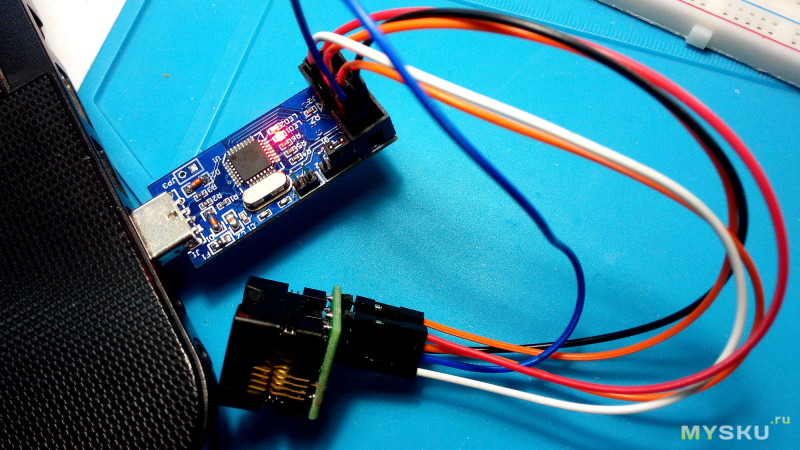
AVRDUDE PROG 3.3
Тут выбирается из списка одноимённый контроллер, программатор USBasp и, если программатор прошит заводской китайской прошивкой, то все операции проходят ровно и гладко. Однако стоит заменить программатор на другой, с обновлённой прошивкой, то при любой операции возникает ошибка.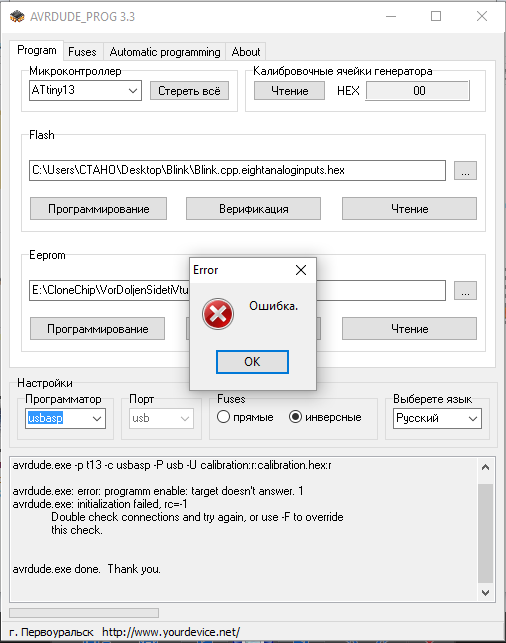
Появляется она из-за того, что ни программа, ни программатор не могут автоматически перейти в режим медленного программирования, необходимый для ATtiny13. Но есть как минимум два выхода:
1) Железный: замкнуть перемычку JP3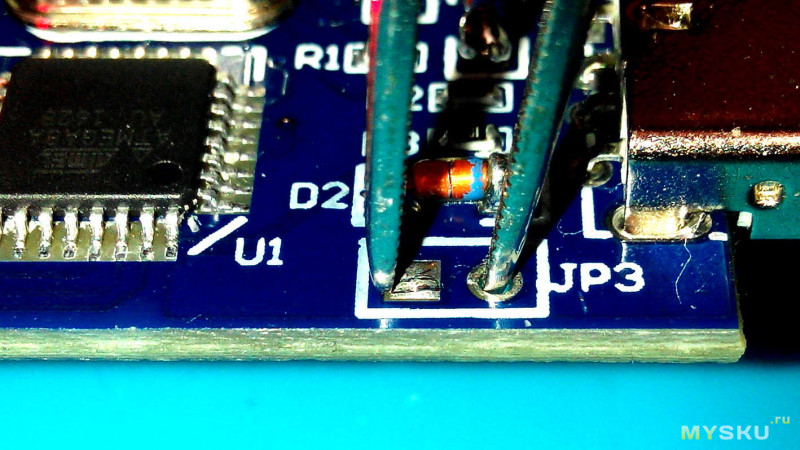
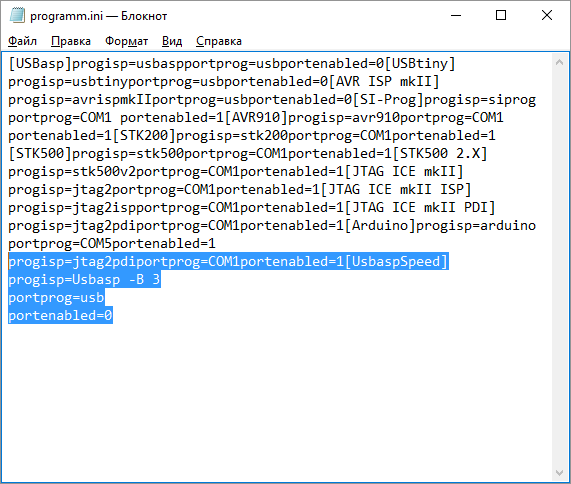
2) Программный: отредактировать файл «programm.ini» в папке с программой AVRDUDE PROG 3.3
Внести туда четыре строчки кода и сохранить. (взято отсюда)
progisp=jtag2pdiportprog=COM1portenabled=1[UsbaspSpeed]
progisp=Usbasp -B 3
portprog=usb
portenabled=0Примечание. Здесь применён ключ «-B», который и занимается переводом программатора на пониженную частоту программирования. Значение «3» — время в микросекундах
После этого снова запустить AVRDUDE PROG 3.3 и в выпадающем списке программаторов выбрать UsbaspSpeed. Теперь работа с ATtiny13 на программаторе с новой прошивкой будет уже без ошибок, а перемычку JP3 замыкать больше не потребуется в этом случае.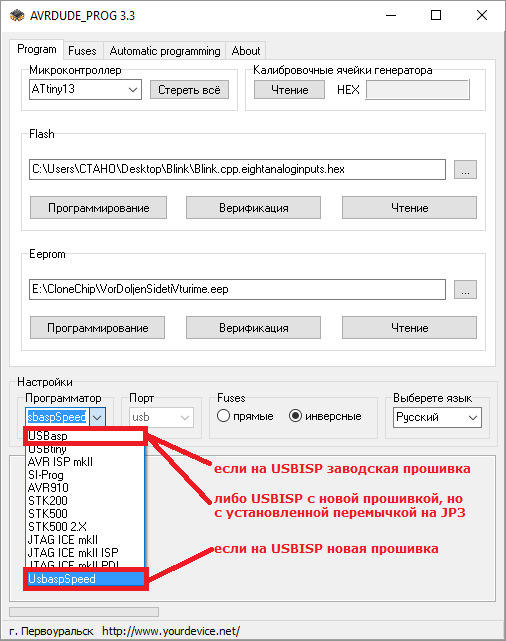
Khazama AVR Programmer
Выбирается контроллер из списка и почти та же ситуация. 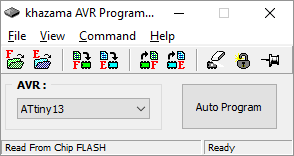
Программатор с заводской прошивкой нормально работает с ATtiny13, если не считать постоянно появляющихся окон с ошибкой, о чём раннее уже рассказывал.
Но с программатором на новой прошивке уже появляется иная ошибка с невозможностью прочесть сигнатуру (цифровую подпись) контроллера.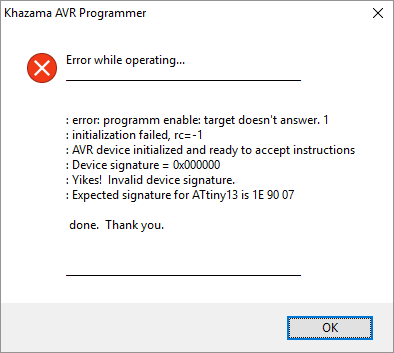
Но стоит замкнуть перемычку JP3, и можно спокойно работать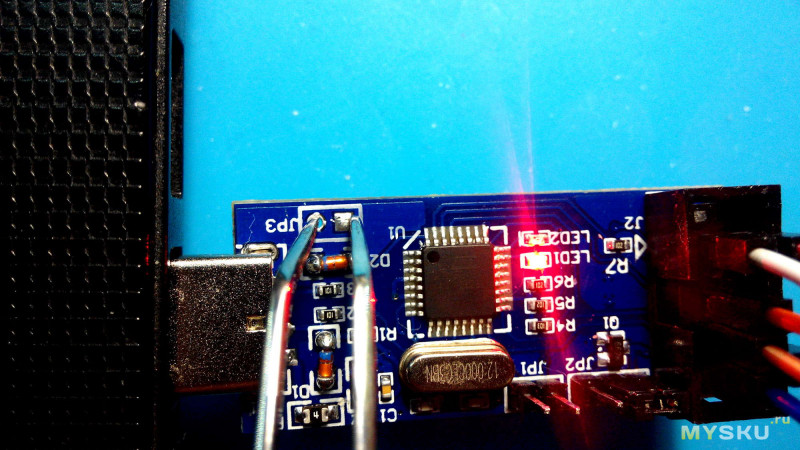

Или просто задать частоту работы из выпадающего списка по пути «Command» -> «Programm Options», я выставил частоту 187.5кГц.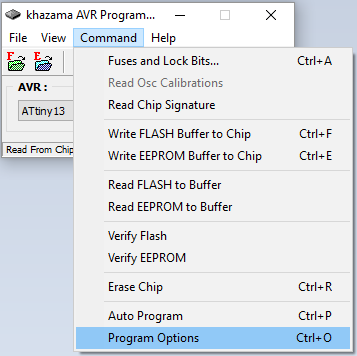
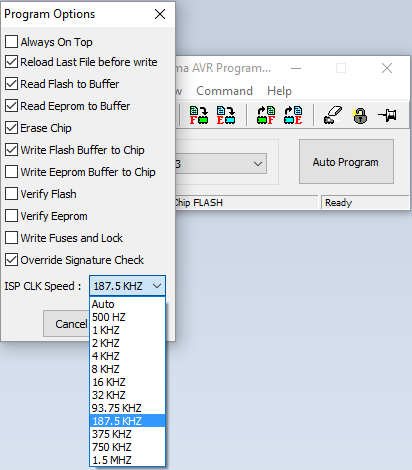
Примечание. Частота программирования должна быть меньше тактовой частоты прошиваемой микросхемы не менее, чем в 4 раза. Но если посмотреть на считанные с ATtiny13 фьюзы, то на последней строчке Int.Rc.Osc. указано 9.6МГц.
Как минимум, у новичка возникнет вопрос — почему на выставленных в KHazame 1.5МГц — появляется та же ошибка? А также почему, если в AtmelStudio написать например код мигания светодиода с частотой раз в секунду и в макросе прописать:то загрузив код на Attiny13, светодиод будет мигать очень медленно?#define f_cpu 9600000
— посмотрим на предпоследнюю строчку, где Divide Clock by 8 Internally [CKDIV8=0] — это включенный предделитель частоты, который делит эти 9.6МГц на 8, и поэтому реальная частота чипа здесь — 1.2МГц. Поэтому при выборе частоты 187.5кГц или меньше, ошибки исчезают и можно работать нормально с контроллером.
Примечание 2. Способ с выбором частоты в KHazame по скорости работы в несколько раз выигрывает у метода с физическим замыканием перемычки JP3, потому как в последнем случае частота понижается до 8кГц.
Интеграция программатора в Atmel Studio 7
Atmel Studio — среда разработки от фирмы Atmel, но напрямую работать с USBASP, тем более китайским, она не может. Однако благодаря той же программе AVRDUDE, входящий в состав пакета AVRDUDE PROG 3.3, которая будет играть здесь роль посредника, можно соорудить «костыль», а уже в самой среде затем добавить возможность прошивать МК, подключенный через USBASP.Сперва нужно запустить среду, предполагается, что некий код у нас уже написан и собран. В моём примере это простая мигалка светодиодом — Blink.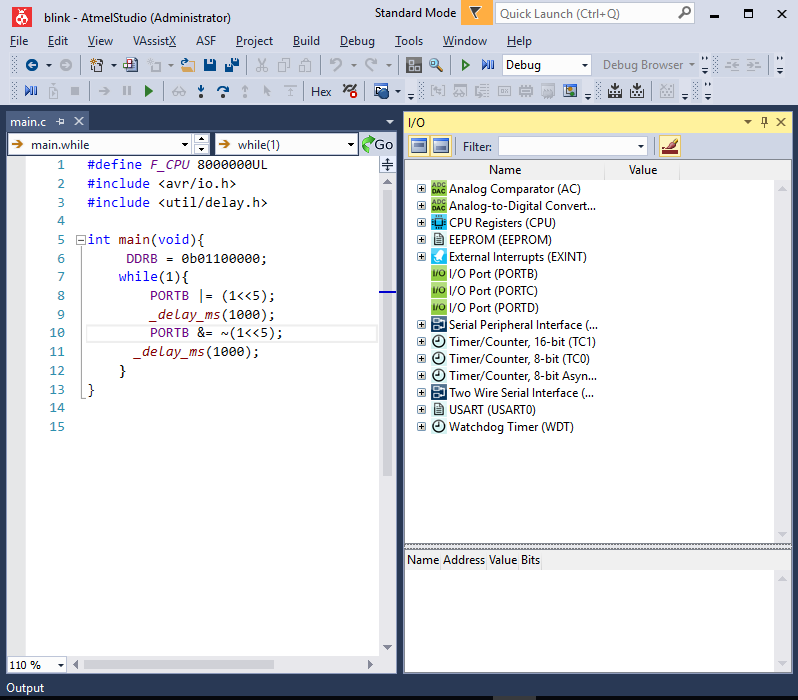
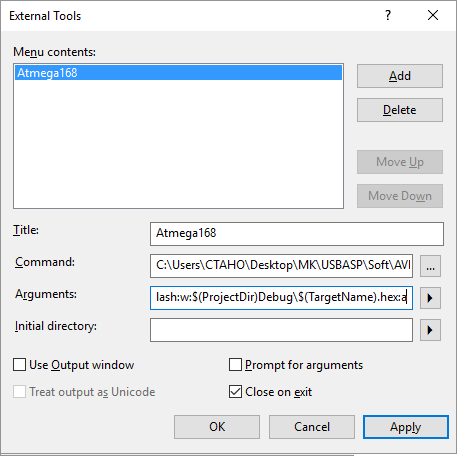
На верхней панели инструментов выбрать «Tools» — «External Tools…»
Откроется небольшое окно, нажать «Add»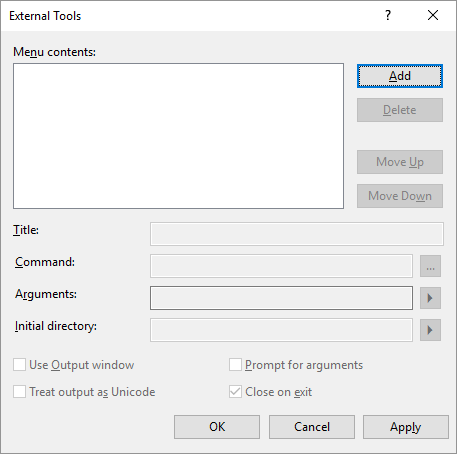
В самом верхнем поле «Title:» ввести любое удобное название, я написал «Atmega168», т.к. та конфигурация, что приведу чуть ниже относится конкретно к этому контроллеру, и для любого другого контроллера она настраивается индивидуально.
В большом поле наверху, название инструмента будет автоматически продублировано.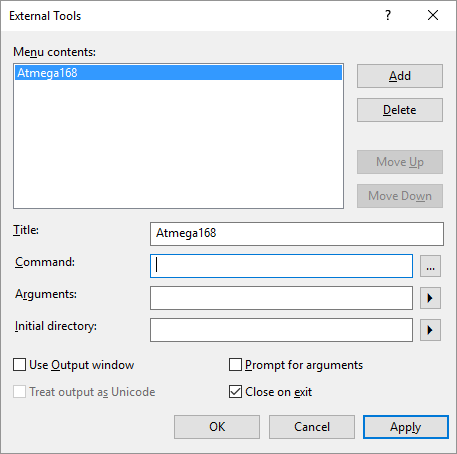
Вторая строка, поле «Command:» — здесь нужно указать путь до файла «avrdude.exe», который находится в папке с вышерассмотренной программой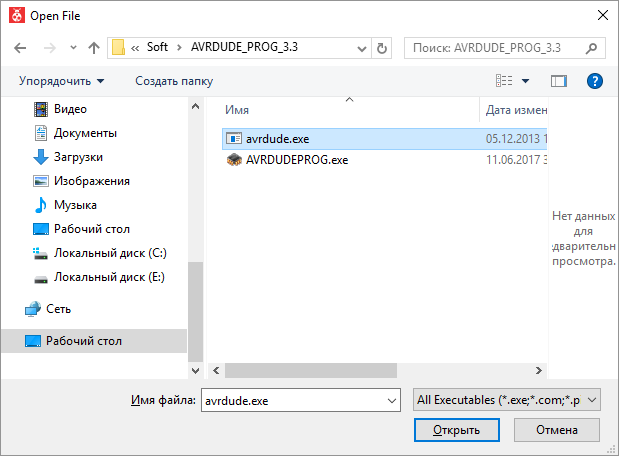
Третья строка, поле «Arguments:» необходимо ввести собственно саму конфигурацию
Конфигурация для Atmega168
-p m168 -c usbasp -P usb -U flash:w:$(ProjectDir)Debug\$(TargetName).hex:a-p — наименование контроллера
-с — какой программатор
-P — порт, через который будет заливаться прошивка
-U — какая операция с какой памятью будет производится (в данном случае запись во Flash)
Если нужно настроить для другого МК, то параметр «m168» нужно изменить на соответствующий контроллер, который будет прошиваться. Например «m8» для Atmega8 или «m328p», если Atmega328p. Параметры для других МК смотрите здесь — также там найдёте описания ключей AVRDUDE.
Конфигурация для ATtiny13
-p t13 -c usbasp -B 3 -P usb -U flash:w:$(ProjectDir)Debug\$(TargetName).hex:a После заполнения полей нажать «Apply» и «ОК». Окно закроется
Теперь, если снова кликнуть по «Tools», там появится только что созданный инструмент. И по нажатии по нему откомпилированный код будет автоматически прошит в контроллер.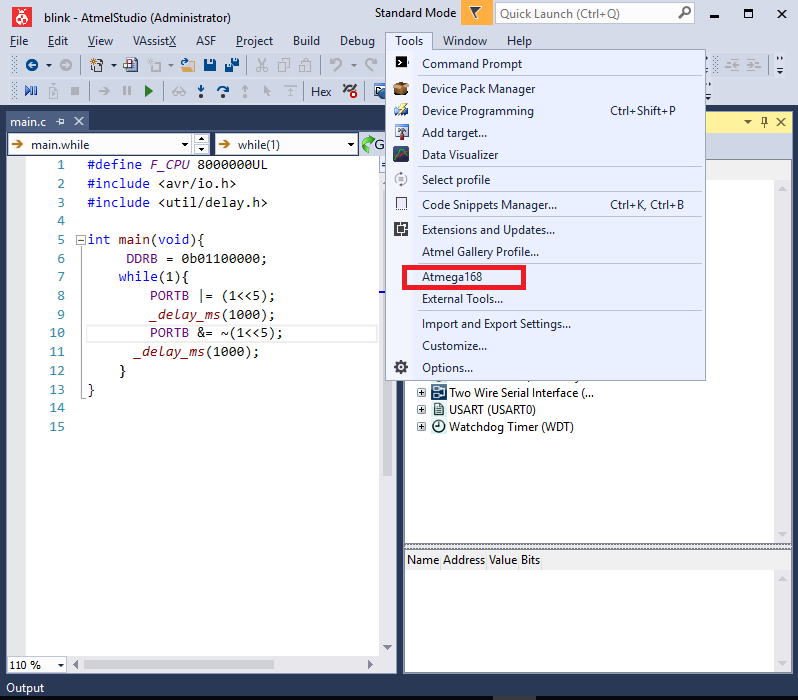
Но эта операция происходит в два клика, что не очень удобно. Надо вынести этот инструмент на главную панель инструментов, чтобы он был всегда на виду.
Для этого нужно снова зайти в «Tools», затем кликнуть по пункту «Customize…»
Откроется следующее окно: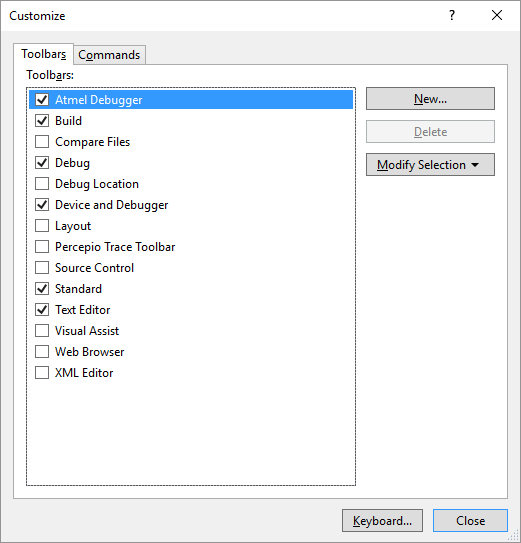
Перейти во вкладку «Commands» — нажать кнопку «Add Command…»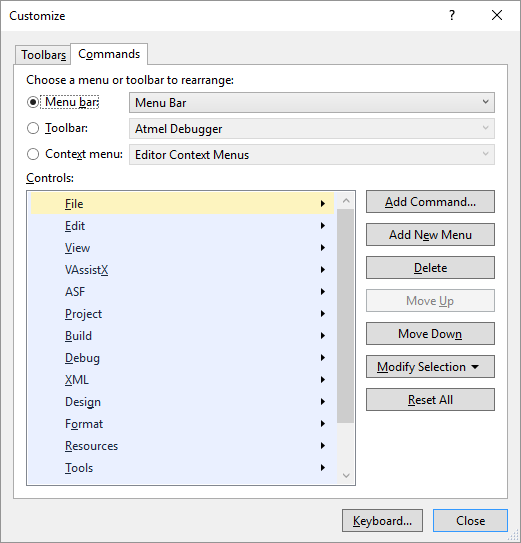
Ещё одно окно появится. В нём — в левой колонке выбрать «Tools», а в правой колонке выделить «External Command 1». Нажать «OK»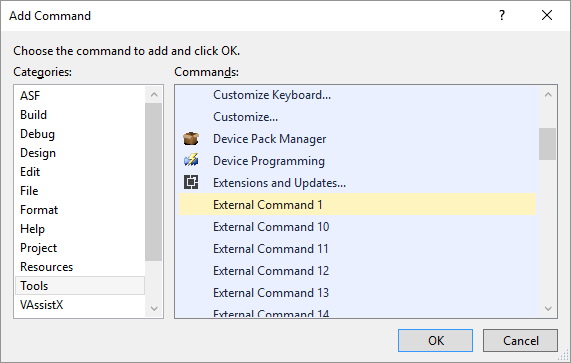
«External Command 1» окажется наверху списка, и, обратите внимание на саму панель инструментов — в интерфейсе появился пункт «Atmega168». 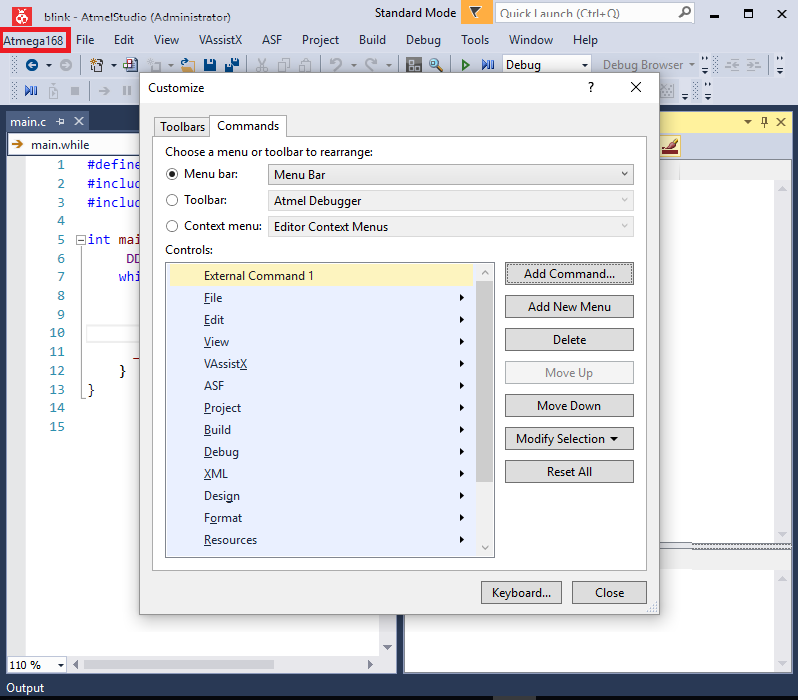
Но как мне кажется, место ему отведено не совсем удачное, желательно его сдвинуть вправо, для этого нажимается кнопка «Move Down» (одно нажатие = сдвиг на одну позицию вправо). После этого можно закрывать окно по кнопке «Close» и шить чип прямо из студии в один клик через обозреваемый программатор.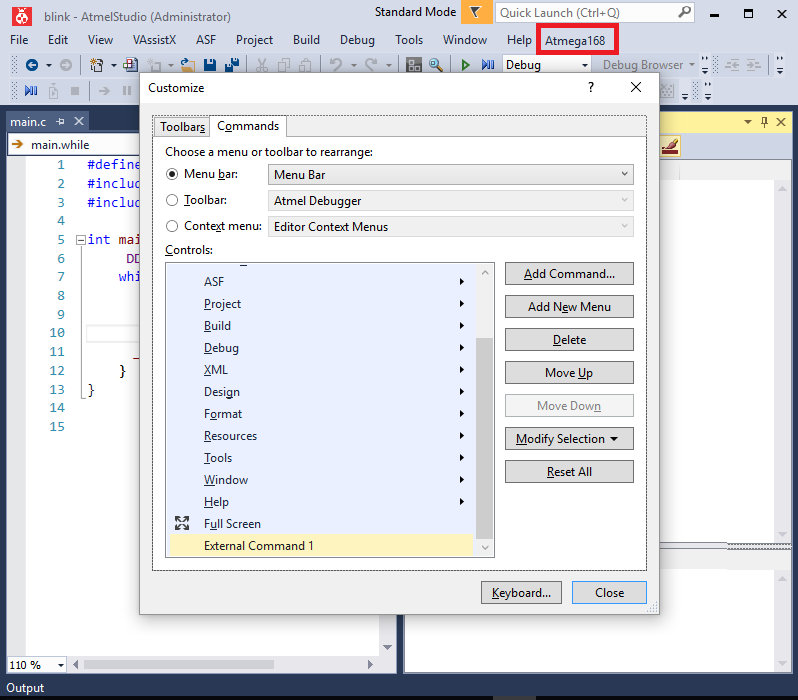
При перепрошивке чипа таким методом, на секунду появляется консольное окно AVRDUDE. Но может возникнуть необходимость как-то сохранить этот лог для дальнейшего его просмотра — тогда в окне «External tools» нужно поставить галку на «Use Output window».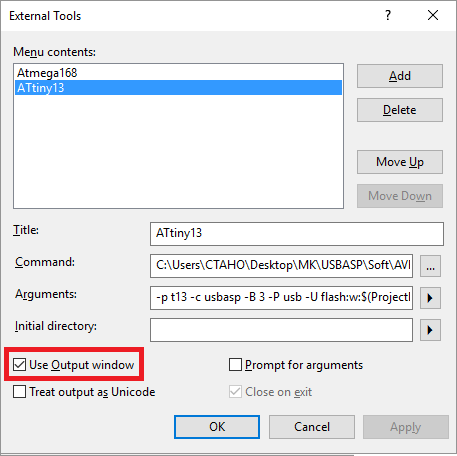
И теперь лог будет отображаться в окне вывода, что внизу программы ATmel Studio 7. Данная галка может задаваться отдельно для каждого добавленного в «External tools» контроллера.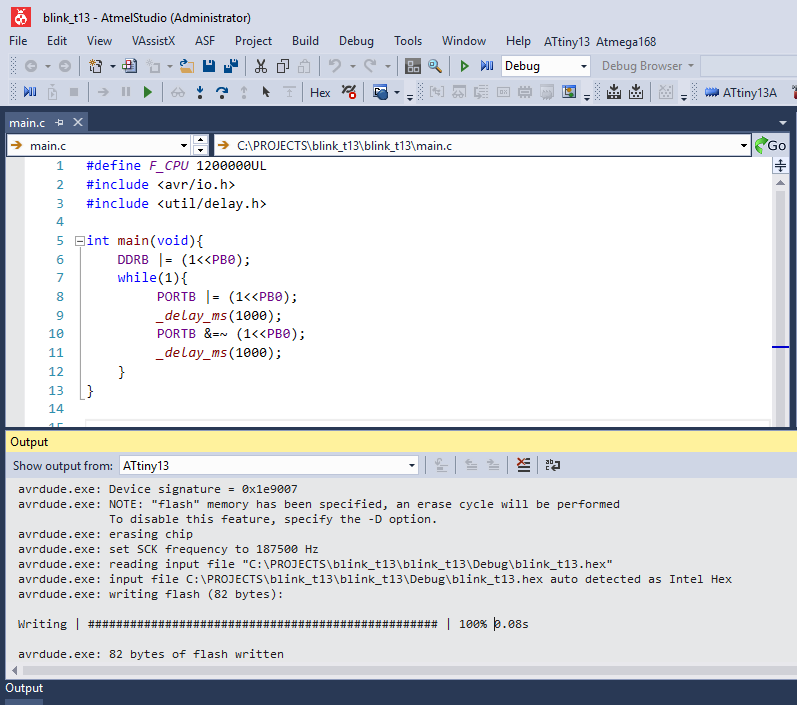
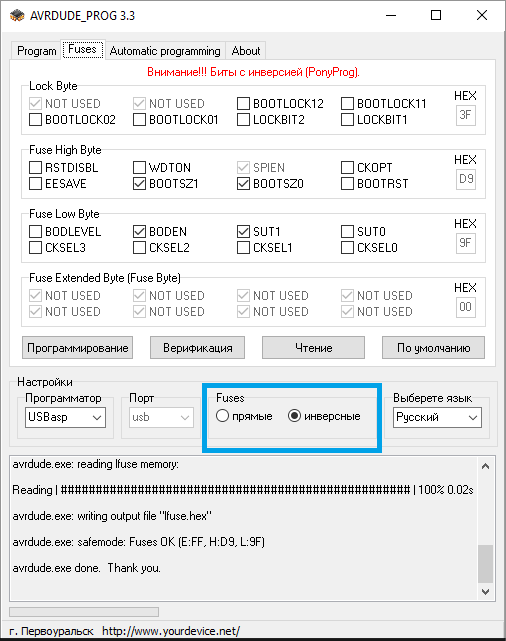
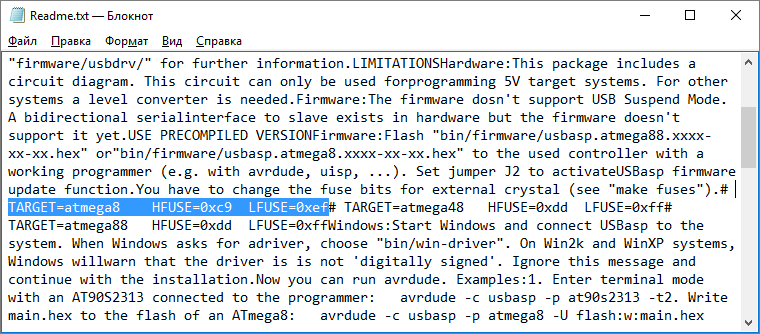
Дополнение по фьюзам программатора
Из документа READMI, идущего в комплекте с драйверами и прошивкой для USBASP, позже выяснилось, что разработчик рекомендует выставить определённую конфигурацию фьюз-битов, определяющих работу внешнего резонатора.Минусом khazam’ы является то, что в окне со фьюзами не отображаются HEX-значения выставленных битов. Это уже можно посмотреть в AVRDUDE PROG. Заводские фьюзы, выставленные китайцами, выглядят так (обязательно поставить точку «инверсные» — выделил синим прямоугольником):
Как рекомендует выставить разработчик:
HFUSE=0xc9
LFUSE=0xef
Это нужно снять две галки с «BODEN» и «SUT1» (выделено красным овалом),
поставить две галки на «CKOPT» и «SUT0» (выделено зелёным прямоугольником),
справа в колонке при этом будут отображаться HEX-значения изменённых битов (выделено жирным красным прямоугольником): Lock Byte: 3F, Fuse High Byte: C9, Fuse Low Byte: EF.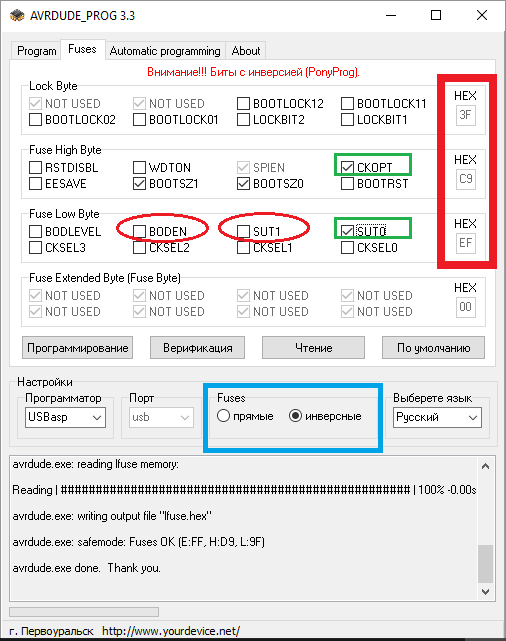
Если всё сходится, можно нажимать «программирование»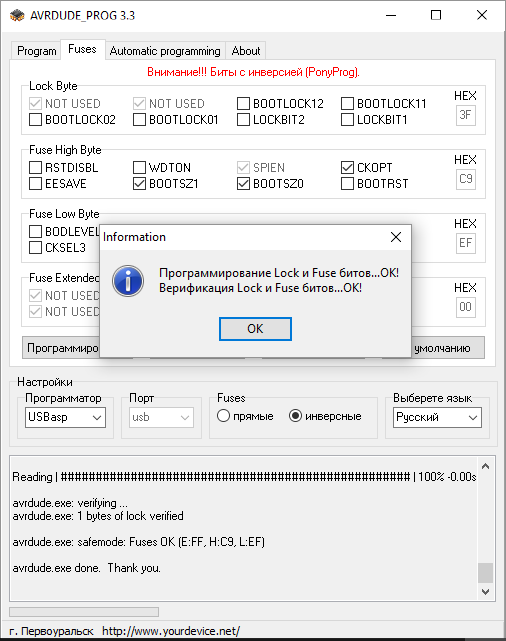
ВНИМАНИЕ. Злой фьюз-бит RSTDISBL — не трогать ни в коем случае, иначе его установка заблокирует контроллер и прошить потом через USBASP его уже будет нельзя._____________________________________
Выводы
Опробовано, работает. Если khazam не планируется использовать, то в обновлении прошивки для программатора — смысла нет, благо и так прекрасно работает, причём в случае с ATtiny13 никаких правок и перемычек вносить не требуется. Последняя прошивка — почему-то оказалась более капризна в этом плане. Единственное, после получения, плату надо пропаять и отмыть.Список ссылок
1) Описание USBASP
2) AVRDUDE PROG 3.3 (форум)
3) Khazama AVR Programmer 1.7
4) Китайская стоковая прошивка (10кб)
5) Архив с прошивками для USBASP и драйверами для Windows — сайт создателя проекта
Советы начинающим программистам микроконтроллеров / Habr
Очень давно хотелось поделиться своим опытом, с начинающими радиолюбителями, потому что об этом пишут очень мало и разрозненно. Мой опыт не хороший, не плохой, он такой какой есть. С некоторыми утверждениями вы в праве не согласиться и это нормально, ведь у каждого свое видение ситуации. Цель данного материала, обратить внимание читателя на некоторые вещи, что то взять на заметку и сформировать собственное мнение и видение ситуации, ни в коем случае нельзя воспринимать это как истину.1. Многие начинающие электронщики не знают с чего начать, поэтому спрашивают совета. Большинство бывалых радиолюбителей ответят, что начни собирать какую нибудь схему. Естественно в голове любого начинающего сразу мелькает LCD дисплей с jpeg картинками, какой нибудь mp3 плеер или часы, без малейшей мысли о том, что не имея базовых знаний это неподъемная задача.
Я категорически против такого подхода. Обычно это все заканчивается — либо ничем, либо забитые форумы с мольбами помочь. Даже если кому то помогают, то в 90% он больше никогда не всплывет на сайтах по электронике. В остальных 10% он так и продолжает заливать форумы мольбами, его будут сначала пинать, затем поливать грязью. Из этих 10% отсеивается еще 9%. Далее два варианта: либо таки до глупой головы доходит и все же происходит goto к началу, либо в особо запущенных вариантах, его удел копировать чужие конструкции, без единой мысли о том как это работает. Из последних зачастую рождаются ардуинщики.
Путь с нуля на мой взгляд заключается в изучении периферии и особенностей, если это микроконтроллер. Правильнее сначала разобраться с тем как дрыгать ножками, потом с таймерами, затем интерфейсами. И только тогда пытаться поднимать свой FAT. Да это не быстро, да это потребует времени и усилий, но практика показывает, как бы вы не пытались сократить этот путь, все равно всплывут проблемы, которые придется решать и время вы потратите куда больше, не имея этой базы.
Только не нужно путать теплое и мягкое. Первое — из всех правил есть исключения, лично видел людей, которые в руках раньше не держали микроконтроллеров, но за крайне короткий срок смогли обскакать бывалых опытных радиолюбителей, их в расчет не берем. Второе — мне попадались личности, которые начинали с копирования схем и сходу разбирались, но скорее это тоже исключение из правил. Третье — и среди ардуинщиков попадаются опытные программисты, это ведь всего навсего платформа, но и это скорее исключение.
Если говорить об общей массе, то дела обстоят именно так как я описал вначале: нежелание разбираться с основами, в лучшем случае оттягивает момент того, когда придется вернуться к этим вопросам. В худшем случае, вы быстро упретесь в потолок своих знаний и все время винить в своих проблемах кого то другого.
2. Перед решением задачи, дробите ее до абсурда вплоть до «припаять резистор», это помогает, проверено. Мелкие задачи решать куда проще. Когда большая задача разбита на кучу мелких действий, то все что остается — это выполнить их. Могу привести еще один годный совет, хоть он вам и покажется бредовым — заведите блокнотик и пишите в него все что собираетесь сделать. Вы думаете, итак запомню, но нет. Допустим сегодня у меня хорошее настроение и думаю о том, как собрать плату. Запиши план действий: сходить купить резистор, подготовить провода, сделать крепление дисплея. Потом все забудешь, откроешь блокнотик и смотришь — ага сегодня настроение попилить и построгать, сделаю крепление. Или собираешь ты плату и уже осталось допаять последний компонент, но не тут то было резисторы кончились, вот записал бы перед тем как паять, то вспомнил.
3. Не пользуйтесь кодогенераторами, нестандартными фичами и прочими упрощалками, хотя бы на первых этапах. Могу привести свой личный пример. Во времена активного использования AVR я пользовался кодогеном CAVR. Меня он полностью устраивал, хотя все говорили, что он кака. Звоночки звенели постоянно, были проблемы с библиотеками, с синтаксисом, с портированием, но было тяжело от этого отказаться. Я не разбирался как это работает, просто знал где и как поставить галочки.
Кол в мой гроб был вбит с появлением STM32, нужно было обязательно переползать на них, вот тогда то и появились проблемы. Проблемы мягко сказано, фактически мне пришлось осваивать микроконтроллеры и язык Си с нуля. Больше я не повторял прошлых ошибок. Надо сказать это уже пригодилось и не один раз. С тех пор мне довелось поработать с другими платформами и никаких затруднений не испытываю, подход оправдывает себя.
По поводу всех улучшалок и упрощалок, было одно очень хорошее сравнение, что они подобны инвалидным коляскам, которые едут по рельсам, можно ехать и наслаждаться, но вставать нельзя, куда везут — туда и приедешь.
4. Изучайте язык Си. Эх, как же часто я слышу, как начинающие радиолюбители хвалятся, что хорошо знают сишку. Для меня это стало кормом, всегда люблю проконсультироваться у таких собеседников. Обычно сразу выясняется, что язык они совершенно не знают. Могу сказать, что не смотря на кажущуюся простоту, людей которые действительно хорошо бы его знали, встречал не так много. В основном все его знают на столько, на сколько требуется для решения задач.
Однако, проблема на мой взгляд заключается в том, что не зная возможностей, вы сильно ограничиваете себя. С одной стороны не оптимальные решения, которые потребуют более мощного железа, с другой стороны не читаемый код, который сложно поддерживать. На мой взгляд, читаемость и поддерживаемость кода занимает одно из важнейших мест и мне сложно представить, как можно этого добиться не используя все возможности языка Си.
Очень многие начинающие брезгуют изучением языка, поэтому если вы не будете как все, то сразу станете на две ступени выше остальных новичков. Так же не никакой разницы, где изучать язык. На мой взгляд, микроконтроллер для этого не очень подходит. Гораздо проще поставить какую нибудь Visual studio или Qt Creator и порешать задачки в командной строке.
Хорошим подспорьем будет также изучение всяких тестов по языку, которые дают при собеседованиях. Если порыться то можно много нового узнать.
5. Изучение ассемблера? Бояться его не нужно, равно как и боготворить. Не нужно думать, что умея написать программу на ассемблере, вы сразу станете гуру микроконтроллеров, почему то это частое заблуждение. В первую очередь это инструмент. Даже если вы не планируете использовать его, то все равно я бы настоятельно рекомендовал написать хотя бы пару программ. Это сильно упростит понимание работы микроконтроллера и внутреннего устройства программ.
6. Читайте даташит. Многие разработчики, пренебрегают этим. Изучая даташит вы будете на две ступени выше тех разработчиков. Делать это крайне полезно, во первых это первоисточник, какие бы сайты вы не читали, в большинстве случаев они повторяют информацию из даташита, зачастую с ошибками и недосказанностями. Кроме того, там может находиться информация, о которой вы не задумываетесь сейчас, но которая может пригодиться в будущем. Может статься так, что вылезет какая то ошибка и вы вспомните что да, в даташите об этом было сказано. Если ваша цель стать хорошим разработчиком, то этого этапа не избежать, читать даташиты придется, чем раньше вы начнете это делать, тем быстрее пойдет рост.
7. Часто народ просит прислать даташит на русском. Даташит — это то, что должно восприниматься как истина, самая верная информация. Даже там не исключены ошибки. Если к этому добавятся ошибки переводчика, он ведь тоже человек, может даже не нарочно, просто опечататься. Либо у него свое видение, может что-то упустить, на его взгляд не важное, но возможно крайне важное для вас. Особенно смешной становится ситуация, когда нужно найти документацию на не сильно популярные компоненты.
На мой взгляд, намного проще исключить заранее весь слой этих проблем, чем вылавливать их потом. Поэтому я категорически против переводов, единственный верный совет — изучайте английский язык, чтобы читать даташиты и мануалы в оригинале. Понять смысл фразы с помощью программ переводчиков можно, даже если уровень вашего языка полный ноль.
Мною был проведен эксперимент: в наличии был студент, даташит и гугл переводчик. Эксперимент №1: студенту вручен даташит и дано задание самостоятельно найти нужные значения, результат — «да как я смогу», «да я не знаю английский», «я ничего не нашел/я не понял» типичные фразы, говорящие о том, что он даже не пытался. Эксперимент №2: тому же студенту, вручен все тот же даташит и тоже задание, с той разницей, что я сел рядом. Результат — через 5 минут он сам нашел все нужные значения, абсолютно без моего участия, без знания английского.
8. Изобретайте велосипед. Например, изучаете какую то новую штуку, допустим транзистор, дядька Хоровиц со страниц своей книги авторитетно заявляет, что транзистор усиливает, всегда говорите — НЕ ВЕРЮ. Берем в руки транзистор включаем его в схему и убеждаемся что это действительно так. Есть целый пласт проблем и тонкостей, которые не описываются в книгах. Прочувствовать их можно только, когда возьмешь в руки и попробуешь собрать. При этом получаем кучу попутных знаний, узнаем тонкости. Кроме того, любая теория без практики забудется намного быстрее.
На первоначальном этапе, мне очень сильно помог один метод — сначала собираешь схему и смотришь как она работает, а затем пытаешься найти обоснование в книге. То же самое и с программной частью, когда есть готовая программа, то проще разобраться в ней и соотнести куски кода, какой за что отвечает.
Также важно выходить за рамки дозволенного, подать побольше/поменьше напряжение, делать больше/меньше резисторы и следить за изменениями в работе схемы. В мозгу все это остается и оно пригодится в будущем. Да это чревато расходом компонентов, но я считаю это неизбежным. Первое время я сидел и палил все подряд, но теперь перед тем как поставить тот или иной номинал, всегда вспоминаю те веселые времена и последствия того, если поставить неверный номинал.
9. А как бы я сделал это, если бы находился на месте разработчиков? Могу ли я сделать лучше? Каждый раз задавайте себе эти вопросы, это очень хорошо помогает продвигаться в обучении. Например, изучите интерфейсы 1wire, i2c, spi, uart, а потом подумайте чем они отличаются, можно ли было сделать лучше, это поможет осознать почему все именно так, а не иначе. Так же вы будете осознавать, когда и какой лучше применить.
10. Не ограничивайтесь в технологиях. Важно что этот совет имеет очень тонкую грань. Был этап в жизни, когда из каждой подворотни доносилось «надо бы знать ПЛИС», «а вот на ПЛИС то можно сделать». Формально у меня не было целей изучать ПЛИСины, но и пройти мимо было никак нельзя. Этому вопросу было выделено немного времени на ознакомление. Время не прошло зря, у меня был целый ряд вопросов, касаемых внутреннего устройства микроконтроллеров, именно после общения с плисинами я получил ответы на них. Подобных примеров много, все знания, которые я приобретал в том или ином виде, рано или поздно пригодились. У меня нет ни единого бесполезного примера.
Но как было сказано, вопрос технологий имеет тонкую грань. Не нужно хвататься за все подряд. В электронике много направлений. Может вам нравится аналог, может цифра, может вы специалист по источникам питания. Если не понятно, то попробуйте себя везде, но практика показывает, что вначале лучше сконцентрироваться на чем то конкретном. Даже если нужно жать в нескольких направлениях, то лучше делать это ступеньками, сначала продавить что то одно.
11. Если спросить начинающего радиолюбителя, что ему больше нравится программирование или схемотехника, то с вероятностью 99% ответ будет программирование. При этом большую часть времени эти программисты тратят на изготовление плат ЛУТом/фоторезистом. Причины в общем то понятны, но довольно часто это переходит в некий маразм, который состоит в изготовлении плат ради изготовления плат.
В интернетах практически единственный трушный путь к программированию это стать джедаем изготовления печатных плат. Я тоже прошел через этот путь, но каждый раз задаю себе вопрос зачем? С тех пор, как я приобрел себе пару плат, на все случаи жизни, каждый раз думаю о том, что мог бы спокойно прожить все это время без самодельных плат. Мой совет, если есть хоть капля сомнений, то лучше не заморачиваться и взять готовую отладочную плату, а время и средства лучше бы потратить на программирование.
12. Следующий совет, особенно болезненный, мне очень не хочется его обсуждать, но надо. Часто мне пишут, мол ххх руб за ууу дорого, где бы подешевле достать. Вроде бы обычный вопрос, но обычно я сразу напрягаюсь от него, так как зачастую он переходит в бесконечные жалобы на отсутствие денег. У меня всегда возникает вопрос: почему бы не оторвать пятую точку и не пойти работать? Хоть в тот же макдак, хоть на стройку, потерпеть месяц, зато потом можно приобрести парочку плат, которых хватит на ближайший год. Да я знаю, что маленьких городах и селах сложно найти работу, переезжайте в большой город. Работайте на удаленке, в общем нужно крутиться. Просто жаловаться нет смысла, выход из ситуации есть, кто ищет его тот находит.
13. В ту же копилку внесу очень болезненный вопрос инструмента. Инструмент должен позволять вам максимально быстро разрабатывать устройства. Почему то очень многие разработчики не ценят свое время. Типичный пример, дешевая обжимка для клемм, на которой так любят экономить многие работодатели. Проблема в том, что она даже обжимает не правильно, из-за этого провода вываливаются. Приходится производить кучу дополнительных манипуляций, соответственно тратить время. Но как известно дурак платит трижды, поэтому низкая цена кримпера возрастет во много раз, за счет затрачиваемого времени и плохого качества обжима.
Не говорю что дешевое = плохое, нет — все зависит от ситуации. Вернусь к примеру кримпера, было время когда обжимал чем попало, поэтому часто возникали проблемы. Особенно неприятно, когда заводишь плату и она не работает, после долгих поисков ошибки понимаешь что из-за плохо обжатого проводочка, обидно. С тех пор как появилась нормальная обжимка этих проблем нет. Да внутренняя жаба и квакала, и душилась от ее стоимости, но ни разу не пожалел об этом решении. Все что я хочу сказать, что поработав с нормальным инструментом, совершенно не хочется возвращаться к плохому, даже не хочется обсуждать это. Как показывает практика, лучше не экономить на инструментах, если сомневаетесь — возьмите у кого нибудь потестить, почитайте отзывы, обзоры.
14. Заведите сайт, можно писать на нем, что угодно, просто как записки. Практика показывает, что работодатели все равно его не читают, но сам факт производит большой эффект.
15. Тонкий вопрос: профильное высшее образование, нужно ли оно? Мне известны не единичные случаи, когда люди работали абсолютно без образования и по опыту и знаниям они могли дать прикурить любому дипломированному специалисту. Собственно, у меня нет профильного образования, испытываю ли я от этого дискомфорт? В определенной степени да.
Еще в самом начале, когда микроконтроллеры были для меня хобби, я много помогал с курсовыми и дипломами разных вузов, просто чтобы оценить свой уровень. Могу сказать уверенно, что уровень в целом невысок вне зависимости от имени вуза. Учиться несколько лет, для того чтобы написать такой диплом, совершенно необязательно. Достигнуть этого можно самостоятельно за весьма короткий срок. И все же зачастую бывали моменты, когда студенты знали какой то предмет, который они проходили на 2-3 курсе, а я этого не знал. Хоть все эти знания и компенсировались самообразованием, но все же лучше было бы не тратить на это время.
Вуз ради бумажки. Могу сказать, что были и такие ситуации, когда предлагали работу, которая требовала обязательного наличия образования и было обидно, что именно в тот момент бумажки не было. Но в целом, история показывает, что большинству работодателей наплевать на вашу бумажку.
Следующий момент довольно часто не учитывается, это окружение. Не забывайте, что люди, с которыми вы учитесь это ваше поколение, не исключено что вам с ними работать. Количество фирм работающих в одной отрасли сильно ограничено. Практика показывает, что даже в больших городах все и все друг о друге знают, вплоть до интимных подробностей.
Еще один момент это возможности. Зачастую у вузов есть свои возможности — оборудование, может какие то секции, может какие то программы работы за рубежом, этим нужно пользоваться, если есть хоть малейшая возможность. Если в вузе вы не видите перспективы, идите в другой, мир на каком то одном не заканчивается.
Если подытожить то совет таков: если есть хоть малейшая возможность — нужно идти учиться, обязательно по профилю, если есть хоть какие то шансы, то лезть везде, а не отсиживать штаны на задней парте. Заводить знакомства, параллельно дома самому практиковаться, развиваться.
16. Поздно ли начинать программировать в 20, 30, 40, 50 лет? Практика других людей показывает, что возраст вообще не помеха. Многие почему то не учитывают то, что есть целый пласт работы, которую молодые в силу своих амбиций не хотят делать. Поэтому работодатели предпочитают брать тех, кто будет ее тащить. Это ваш шанс зацепиться, а дальше все зависит только от вас.
И последний совет. Многие радиолюбители необщительные, сердитые и раздражительные — считайте это спецификой работы. Излучайте добро и позитив, будьте хорошим человеком.
Средства программирования PIC-контроллеров / Habr
Введение
PIC-контроллеры остаются популярными в тех случаях, когда требуется создать недорогую компактную систему с низким энергопотреблением, не предъявляющую высоких требований по ее управлению. Эти контроллеры позволяют заменить аппаратную логику гибкими программными средствами, которые взаимодействуют с внешними устройствами через хорошие порты.
Миниатюрные PIC контроллеры хороши для построения преобразователей интерфейсов последовательной передачи данных, для реализации функций «прием – обработка – передача данных» и несложных регуляторов систем автоматического управления.
Компания Microchip распространяет MPLAB — бесплатную интегрированную среду редактирования и отладки программ, которая записывает бинарные файлы в микроконтроллеры PIC через программаторы.
Взаимодействие MPLAB и Matlab/Simulink позволяет разрабатывать программы для PIC-контроллеров в среде Simulink — графического моделирования и анализа динамических систем. В этой работе рассматриваются средства программирования PIC контроллеров: MPLAB, Matlab/Simulink и программатор PIC-KIT3 в следующих разделах.
• Характеристики миниатюрного PIC контроллера PIC12F629
• Интегрированная среда разработки MPLAB IDE
• Подключение Matlab/Simulink к MPLAB
• Подключение программатора PIC-KIT3
Характеристики миниатюрного PIC-контроллера
Семейство РIС12ххх содержит контроллеры в миниатюрном 8–выводном корпусе со встроенным тактовым генератором. Контроллеры имеют RISC–архитектуру и обеспечивают выполнение большинства команд процессора за один машинный цикл.
Для примера, ниже даны характеристики недорогого компактного 8-разрядного контроллера PIC12F629 с многофункциональными портами, малым потреблением и широким диапазоном питания [1].
• Архитектура: RISC
• Напряжение питания VDD: от 2,0В до 5,5В (< 6,5В)
• Потребление:
— <1,0 мА @ 5,5В, 4МГц
— 20 мкА (тип) @ 32 кГц, 2,0В
— <1,0 мкА (тип) в режиме SLEEP@2,0В
• Рассеиваемая мощность: 0,8Вт
• Многофункциональные каналы ввода/вывода: 6/5
• Максимальный выходной ток портов GPIO: 125мА
• Ток через программируемые внутренние подтягивающие резисторы портов: ≥50 (250) ≤400 мкА @ 5,0В
• Разрядность контроллера: 8
• Тактовая частота от внешнего генератора: 20 МГц
Длительность машинного цикла: 200 нс
• Тактовая частота от внутреннего RC генератора: 4 МГц ±1%
Длительность машинного цикла: 1мкс
• FLASH память программ: 1К
Число циклов стирание/запись: ≥1000
• ОЗУ память данных: 64
• EEPROM память данных: 128
Число циклов стирание/запись: ≥10K (-40оС ≤TA≤ +125 оС)
• Аппаратные регистры специального назначения: 16
• Список команд: 35 инструкций, все команды выполняются за один машинный цикл,
кроме команд перехода, выполняемых за 2 цикла
• Аппаратный стек: 8 уровней
• Таймер/счетчик ТМR0: 8-разрядный с предделителем
• Таймер/счетчик ТМR1: 16-разрядный с предделителем
Дополнительные особенности:
• Сброс по включению питания (POR)
• Таймер сброса (PWRTтаймер ожидания запуска генератора (OST
• Сброс по снижению напряжения питания (BOD)
• Сторожевой таймер WDT
• Мультиплексируемый вывод -MCLR
• Система прерываний по изменению уровня сигнала на входах
• Индивидуально программируемые для каждого входа подтягивающие резисторы
• Программируемая защита входа
• Режим пониженного энергопотребления SLEEP
• Выбор режима работы тактового генератора
• Внутрисхемное программирование ICSP с использованием двух выводов
• Четыре пользовательские ID ячейки
Предельная рабочая температура для Е исполнения (расширенный диапазон) от -40оС до +125 оС;
Температура хранения от -65оС до +150 оС.
КМОП технология контроллера обеспечивает полностью статический режим работы, при котором остановка тактового генератора не приводит к потере логических состояний внутренних узлов.
Микроконтроллер PIC12F629 имеет 6-разрядный порт ввода/вывода GPIO. Один вывод GP3 порта GPIO работает только на вход, остальные выводы можно сконфигурировать для работы как на вход так и на выход. Каждый вывод GPIO имеет индивидуальный бит разрешения прерываний по изменению уровня сигнала на входах и бит включения внутреннего подтягивающего резистора.
Интегрированная среда разработки MPLAB IDE
MPLAB IDE — бесплатная интегрированная среда разработки ПО для микроконтроллеров PIC включает средства для создания, редактирования, отладки, трансляции и компоновки программ, записи машинного кода в микроконтроллеры через программаторы.
Загрузка MPLAB IDE
Бесплатные версии MPLAB (включая MPLAB 8.92) хранятся на сайте компании Microchip в разделе «DOWNLOAD ARCHIVE».
Создание проекта
Пример создания проекта программ PIC контроллера в среде MPLAB включает следующие шаги [2].
1. Вызов менеджера проекта.
2. Выбор типа PIC микроконтроллера.
3. Выбор компилятора, например, Microchip MPASM для ассемблера.
4. Выбор пути к каталогу проекта (клавиша Browse…) и ввод имени проекта.
5. Подключение файлов к проекту в окне Project Wizard → Step Four можно не выполнять. Это можно сделать позднее, внутри активного проекта. Клавиша Next открывает следующее окно.
6. Завершение создания проекта (клавиша Finish).
В результате создания проекта FirstPrMPLAB интерфейс MPLAB принимает вид, показанный на Рис. 1.
Рис. 1. Интерфейс среды MPLAB v8.92 и шаблон проекта.
Создание файла программы
Программу можно создать при помощи любого текстового редактора. В MPLAB имеется встроенный редактор, который обеспечивает ряд преимуществ, например, оперативный лексический анализ исходного текста, в результате которого в тексте цветом выделяются зарезервированные слова, константы, комментарии, имена, определенные пользователем.
Создание программы в MPLAB можно выполнить в следующей последовательности.
1. Открыть редактор программ: меню → File → New. Изначально программе присвоено имя Untitled.
2. Набрать или скопировать программу, например, на ассемблере.
3. Сохранить программу под другим именем (меню → File → Save As), например, FirstPrMPLAB.asm.
Рис. 2. Пример простейшей программы (на ассемблере) вывода сигналов через порты контроллера GP0, GP1, GP2, GP4, GP5 на максимальной частоте.
Запись ‘1’ в разряде регистра TRISIO переводит соответствующий выходной буфер в 3-е состояние, в этом случае порт GP может работать только на вход. Установка нуля в TRISIO настраивает работу порта GP на выход.
Примечание. По спецификации PIC12F629 порт GP3 микроконтроллера работает только на вход (соответствующий бит регистра TRISIO не сбрасывается – всегда находится в ‘1’).
Регистры TRISIO и GPIO находятся в разных банках области памяти. Переключение банков выполняется 5-м битом регистра STATUS.
Любая программа на ассемблере начинается директивой org и заканчивается директивой end. Переход goto Metka обеспечивает циклическое выполнение программы.
В программе (Рис. 2) используются следующие обозначения.
Директива LIST — назначение типа контроллера
Директива __CONFIG — установка значений битов конфигурации контроллера
Директива equ — присвоение числового значения
Директива org 0 — начало выполнения программы с адреса 0
Команда bsf — устанавливает бит указанного регистра в 1
Команда bсf — сбрасывает бит указанного регистра в 0
Команда movlw — записывает константу в регистр W
Команда movwf — копирует содержимое регистра W в указанный регистр
Команда goto — обеспечивает переход без условия на строку с меткой
Директива end — конец программы
Установка требуемой конфигурации микроконтроллера
Конфигурация микроконтроллера PIC12F629 зависит от настроек слова конфигурации (2007h), которые можно задать в программе через директиву __CONFIG.
Непосредственно или через окно MPLAB: меню → Configure → Configuration Bits:
Где:
Бит 2-0 — FOSC2:FOSC0. Выбор тактового генератора
111 — Внешний RC генератор. Подключается к выводу GP5. GP4 работает как CLKOUT
110 — Внешний RC генератор. Подключается к выводу GP5. GP4 работает как ввод/вывод
101 — Внутренний RC генератор 4МГц. GP5 работает как ввод/вывод. GP4 — как CLKOUT
100 — Внутренний RC генератор 4МГц. GP5 и GP4 работают как ввод/вывод
011 — EC генератор. GP4 работает как ввод/вывод. GP5 — как CLKIN
010 — HC генератор. Резонатор подключается к GP4 и GP5
001 — XT генератор. Резонатор подключается к GP4 и GP5
000 — LP генератор. Резонатор подключается к GP4 и GP5Бит 3 — WDTE: настройка сторожевого таймера (Watchdog Timer)
1 — WDTE включен
0 — WDTE выключенСторожевой таймер предохраняет микроконтроллер от зависания – перезапускает программу через определенный интервал времени если таймер не был сброшен. Период таймера устанавливается в регистре OPTION_REG. Обнуление сторожевого таймера вызывается командой CLRWDT.
Бит 4 — PWRTE: Разрешение работы таймера включения питания:
1 — PWRT выключен
0 — PWRT включенТаймер задерживает микроконтроллер в состоянии сброса при подаче питания VDD.
Бит 5 — MCLR: Выбор режима работы вывода GP3/-MCLR
1 — работает как -MCLR
0 — работает как порт ввода-вывода GP3Бит 6 — BODEN: Разрешение сброса по снижению напряжения питания (как правило < 2.0В)
1 — разрешен сброс BOR
0 — запрещен сброс BOR автоматически включается таймерПри разрешении сброса BOR автоматически включается таймер PWRT
Бит 7 — .CP: Бит защиты памяти программ от чтения программатором
1 Защита выключена
0 Защита включенаПри выключения защиты вся память программ стирается
Бит 8 — .CPD: Бит защиты EPROM памяти данных
1 Защита выключена
0 Защита включенаПосле выключения защиты вся информация будет стерта
Бит 11-9 — Не используются: Читается как ‘1’.
Бит 13-12 — BG1:BG0. Биты калибровки сброса по снижению питания
00 — нижний предел калибровки
11 — верхний предел калибровки
Добавление программы к проекту
Пример добавления программы к проекту показан на (Рис. 3).
Рис. 3. Добавление программы FirstPrMPLAB.asm к проекту FirstPrMPLAB.mcp
Сохранить материалы проекта можно командой: меню → File → Save Workspace.
Компиляция
Чтобы создать бинарный файл с расширением hex для прошивки микроконтроллера необходимо откомпилировать проект. Запуск компиляции выполняется командой меню → Project → Build All. Результаты компиляции можно увидеть в окне Output (Рис. 1). Если в программе нет ошибок, то компилятор выдаёт сообщение об успешной компиляции: BUILD SUCCEEDED, загрузочный HEX файл можно найти в рабочем каталоге:
Отладка программы
Отладку программы в среде MPLAB IDE можно выполнить при помощи аппаратного эмулятора MPLAB REAL ICE или программного симулятора MPLAB SIM. Запуск последнего выполняется как показано на Рис. 4.
Рис. 4. Подключение к симулятору MPLAB SIM для отладки программы.
После запуска отладчика в окне Output (Рис. 1) появляется закладка MPLAB SIM, куда MPLAB выводит текущую информацию отладчика. Команды отладчика (Рис. 5) после запуска становятся активными.
Рис. 5. Команды отладчика.
Команды отладчика:
• Run — Непрерывное выполнение программы до точки останова (Breakpoint) если таковая установлена.
• Halt — Остановка программы на текущем шаге выполнения.
• Animate — Анимация непрерывного выполнения программы.
• Step Into — Выполнение по шагам (вызовы Call выполняются за один шаг).
• Step Over — Выполнение по шагам включая команды вызовов Call.
• Reset — Начальная установка программы. Переход указателя на первую команду.
• Breakpoints — Отображение списка точек останова. Обработка списка.
При выполнении программы по шагам текущий шаг выделяется стрелкой (Рис. 6). Непрерывное выполнение программы останавливается командой Halt или достижением программой точки останова. Точка останова устанавливается/снимается в строке программы двойным щелчком.
Пример программы на ассемблере, которая с максимальной скоростью меняет состояние портов контроллера показан на Рис. 6 (справа). Программа передаёт в регистр портов GPIO данные b’10101010’ и b’01010101’. Поскольку в регистре GPIO передачу данных в порты контроллера выполняют не все разряды, а только 0,1,2,4 и 5, то состояние регистра GPIO (Рис. 6, слева) отличается значениями: b’00100010’ и b’00010101’.
Рис. 6. Состояние регистров специального назначения контроллера на момент выполнения программы (слева) и выполняемая по шагам программа (справа).
В процессе отладки можно наблюдать за состоянием регистров, переменных, памяти в соответствующих окнах, открываемых в разделе View основного меню. В процессе отладки можно вносить изменения в код программы, содержимое регистров, памяти, изменять значения переменных. После изменения кода необходимо перекомпилировать программу. Изменение содержимого регистров, памяти и значения переменных (окна раздела View: Special Function Register, File Register, EEPROM, Watch) не требует перекомпиляции.
Входные сигналы портов модели микроконтоллера можно задать в разделе Debugger → Stimulus. Устанавливаемые состояния сигналов портов привязываются к времени (тактам) отладки.
Иногда результаты выполнения программы в режиме отладки не соответствуют выполнению этой же программы в реальном контроллере, так, например, отладчик программы (Рис. 6) без инструкций movlw 0x07 и movwf cmcon показывает, что выходы GP0 и GP1 регистра GPIO не изменяются — находятся в нулевом состоянии, содержимое регистра GPIO попеременно равно 0x14 и 0х20. Однако, контроллер, выполняющий программу без указанных инструкций, показывает на осциллографе циклическую работу всех пяти выходов: 0x15 и 0х22, включая GP0 и GP1 (см. Рис. 7).
Осциллограммы контроллера, выполняющего циклы программы Рис. 6 (Metka… goto Metka) показаны на Рис. 7.
Рис. 7. Осциллограммы выхода GP0 (слева) и GP1 (справа) микроконтроллера PIC12F629, работающего от внутреннего 4МГц RC генератора. Программа (Рис. 6) формирует сигналы максимальной частоты на всех выходах контроллера. За период сигналов 5.3 мкс выполняется 5 команд (6 машинных циклов), амплитуда GP0 сигнала на осциллограмме равна 4.6В, измеренное программатором питание контроллера 4.75В.
Прошивка микроконтроллера
Для записи программы в микроконтроллер (прошивки контроллера) необходимо микроконтроллер подключить к интегрированной среде MPLAB IDE через программатор. Организация подключения показана ниже в разделе «Подключение программатора PIC-KIT3».
Примечание. В контроллер PIC12F629 записана заводская калибровочная константа настройки частоты внутреннего тактового генератора. При необходимости её можно прочитать и восстановить средствами MPLAB с использованием программатора.
Команды для работы с программатором и изменения его настроек находятся в меню MPLAB Programmer. Тип программатора в MPLAB выбирается в разделе: меню → Programmer → Select Programmer.
Рис. 8. Выбор программатора для подключения к среде MPLAB.
Прошивка микроконтроллера через программатор запускается командой: меню → Programmer → Program. Сообщение об успешной прошивке показано на Рис. 9.
Рис. 9. Запуск прошивки микроконтроллера и вид сообщения об успешной прошивке.
Примечание: Во время прошивки микроконтроллера у программатора PIC-KIT3 мигает желтый светодиод.
Подключение MATLAB/SIMULINK к MPLAB
В системе моделирования динамических систем Simulink (приложение к Matlab) на языке графического программирования [7] можно разрабатывать программы для семейства PIC контроллеров имеющих АЦП/ЦАП, счетчики, таймеры, ШИМ, DMA, интерфейсы UART, SPI, CAN, I2C и др.
Пример Simulink программы PIC контроллера показан на Рис. 10.
Рис. 10. Пример программы на языке графического программирования для PIC контроллера выполненной в среде моделирования динамических систем Simulink.
Взаимодействие средств разработки и компиляции программ для PIC контроллеров в Simulink показано на Рис. 11 [6].
Рис. 11. Структура средств построения адекватной модели PIC контроллера на языке графического программирования.
Для построения среды разработки необходимы следующие компоненты Matlab:
• Simulink
• Real-Time Workshop Embedded Coder
• Real-Time Workshop
И Cи компилятор компании Microchip:
• C30 для контроллеров PIC24, dsPIC30 и PIC33
• или C32 для контроллеров серии PIC32
Установка компонентов Matlab
На сайте имеются Simulink библиотеки (dsPIC Toolbox) для PIC контроллеров и версий Matlab c R2006a по R2012a:
Для скачивания библиотеки необходимо зарегистрироваться. Программы поддерживают работу 100 микроконтроллеров из серий PIC 16MC, 24F, 30F, 32MC, 33F, 56GP, 64MC, 128MC, 128GP.
Бесплатные версии работают с Simulink моделями PIC контроллеров имеющих до 7 портов ввода-вывода.
Для установки dsPIC Toolbox — библиотеки блоков PIC контроллеров для Matlab/Simulink необходимо [4]:
• Скачать dsPIC Toolbox для требуемой версии Matlab.
• Распаковать zip файл в папке, в которой будут установлены Simulink блоки.
• Запустить Matlab.
• Настроить текущий каталог Matlab на папку с распакованным файлом.
• Открыть и запустить файл install_dsPIC_R2012a.m, например, кнопкой меню или клавишей клавиатуры.
Библиотеки dsPIC и примеры Simulink моделей устанавливаются в текущую папку Matlab (Рис. 12). Установленные блоки для моделирования PIC контроллеров доступны в разделе Embedded Target for Microchip dsPIC библиотеки Simulink (Рис. 13).
Рис. 12. Содержимое текущего каталога после выполнения install_dsPIC_R2012a.m.
Рис. 13. Блоки, установленной библиотеки «Embedded Target for Microchip dsPIC».
Для совместной компиляции Simulink модели средствами Matlab и MPLAB необходимо прописать в переменной окружения path Matlab с высшим приоритетом путь к каталогу MPLAB с файлами MplabOpenModel.m, MplabGetBuildinfo.m и getHardwareConfigs.m:
>> path('c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\',path) Установка Си компилятора MPLAB
Компиляторы MPLAB находятся на сайте Microchip (Download Archive → MPLAB C Compiler for PIC24 and dsPIC DSCs). Для установки демонстрационной версии компилятора С30 необходимо его скачать по ссылке PIC24/dsPIC v3.25 (Рис. 14) и запустить принятый файл mplabc30-v3.25-comboUpgrade.exe.
Рис. 14. Версии Си компилятора (слева) и режимы его установки (справа).
Примечание. Работа выполнена с версией v3.25 компилятора С30 для PIC24/dsPIC. Проверка показала, что следующая версия v3.30 не поддерживает совместную компиляцию моделей Matlab R2012a (dsPIC Toolbox) без ошибок.
Установочный exe файл создаёт в разделе c:\Program Files (x86)\Microchip\ новый каталог mplabc30 с файлами:
Рис. 15. Каталоги компилятора C30 MPLAB.
Последовательность Simulink программирования для PIC контроллеров
1. Создайте рабочий каталог и скопируйте в него *.mdl примеры из раздела example (см. Рис. 12).
2. Загрузите Matlab. Настройте его на рабочий каталог.
3. Включите в переменную окружения path Matlab с высшим приоритетом путь к MPLAB — каталогу c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\:
>> path('c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\',path) Примечание: Использование команды >>path без аргументов приводит к отображению списка путей переменной path в окне команд (Command Window). Удалить путь из переменной path можно командой rmpath, например:
>>rmpath(' c:\Program Files\Microchip\MPLAB IDE\Tools\MATLAB\')4. Создайте Simulink модель для PIC контроллера, используя блоки библиотеки «Embedded Target for Microchip dsPIC» (Рис. 13), или загрузите готовую модель, например, Servo_ADC.mdl.
Тип контроллера, для которого разрабатывается Simulink модель, выбирается из списка в блоке Master > PIC (Рис. 16, Рис. 10), который должен быть включен в состав модели.
Рис. 16. Выбор типа контроллера в блоке Master модели.
5. Проверьте настройки конфигурации модели: Меню → Simulation → Configuration Parameters <Ctrl+E>. В строке ввода System target file раздела Code Generation должен быть указан компилятор S-функций dspic.tlc (Рис. 17). Выбор dspic.tlc настраивает все остальные параметры конфигурации модели, включая шаг и метод интегрирования.
Рис. 17. Выбор компилятора S-функций dspic.tlc для моделей PIC-контроллеров в разделе «основное меню → Simulation → Configuration Parameters → Code Generation».
6. Откомпилируйте модель tmp_Servo_ADC.mdl. Запуск компилятора показан на Рис. 18.
Рис. 18. Запуск компилятора Simulink модели.
В результате успешной компиляции (сообщение: ### Successful completion of build procedure for model: Servo_ADC) в текущем каталоге создаются HEX файл для прошивки PIC контроллера и MCP проект среды MPLAB (Рис. 19).
Рис. 19. Результаты компиляции модели.
Запуск модели в Matlab/Simulink выполняется в окне модели кнопкой, условное время моделирования устанавливается в строке:
Управление компиляцией Simulink моделей из среды MPLAB
Управление компиляцией Simulink модели можно выполнять командами раздела Matlab/Simulink среды MPLAB, например, в следующем порядке.
1. Разработайте модель PIC контроллера в Matlab/Simulink. Сохраните модель.
2. Запустите MPLAB.
3. Выберите MPLAB меню → Tools → Matlab/Simulink и новый раздел появится в составе меню.
4. В разделе Matlab/Simulink откройте Simulink модель, например, Servo_ADC, командой «Matlab/Simulink → Specify Simulink Model Name → Open → File name → Servo_ADC.mdl → Open». Команда Open запускает Matlab и открывает модель.
5. Откомпилируйте модель и создайте MCP проект командами Generate Codes или Generate Codes and Import Files. Перевод MDL модели в MCP проект выполняется TLC компилятором Matlab.
В результате создаётся проект MPLAB:
со скриптами модели на языке Си.
6. Откройте проект: меню → Project → Open → Servo_ADC.mcp (Рис. 20).
Рис. 20. Структура MCP проекта Simulink модели Servo_ADC.mdl в среде MPLAB.
Проект Simulink модели готов для редактирования, отладки и компиляции в машинные коды контроллера средствами MPLAB.
Подключение программатора PIC-KIT3
Узнать какие программаторы записывают бинарный код в конкретный микроконтроллер можно в разделе меню → Configure → Select Device среды MPLAB 8.92. Например, программатор PIC-KIT3 не поддерживает контроллер PIC12C508A (Рис. 21, левый рисунок), но работает с контроллером PIC12F629 (Рис. 21, правый рисунок).
Рис. 21. Перечень программаторов для прошивки микроконтроллера.
Информацию об установленном драйвере программатора PIC-KIT3 можно запросить у менеджера устройств ОС Windows (Рис. 22).
Рис. 22. Информация об установленном драйвере программатора PIC-KIT3.
Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3 показана на Рис. 23.
Рис. 23. Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3.
Вывод PGM программатора для прошивки контроллеров PIC12F629 не используется. Наличие вывода PGM для разных типов PIC контроллеров показано на Рис. 24. Вывод PGM рекомендуется «притягивать» к общему проводу (GND), через резистор, номиналом 1К [3].
Рис. 24. Выводы PGM PIC контроллеров.
Индикация светодиодов программатора Olimex PIC-KIT3 показана в ниже:
Желтый — Красный — Состояние программатора
Вкл — Выкл — Подключен к USB линии
Вкл — Вкл — Взаимодействие с MPLAB
Мигает — Включен постоянно — Прошивка микроконтроллера
Не следует подключать питание микроконтроллера VDD (Рис. 23) к программатору, если контроллер запитывается от своего источника питания.
При питании микроконтроллера от программатора на линии VDD необходимо установить рабочее напряжение, например, 5В программой MPLAB (Menu → Programmer → Settings → Power), как показано на Рис. 25.
Примечание. При отсутствии напряжения на линии VDD MPLAB IDE выдает сообщение об ошибке: PK3Err0045: You must connect to a target device to use
Рис. 25. Установка напряжения VDD на программаторе PIC-KIT3 программой MPLAB IDE v8.92.
Если программатор не может установить требуемое напряжение, например, 5В при его питании от USB, в которой напряжение меньше 5В, MPLAB IDE выдает сообщение об ошибке: PK3Err0035: Failed to get Device ID. В этом случае, сначала необходимо измерить напряжение программатора — считать его в закладке меню → Programmer → Settings → Status, а затем установить напряжение (не больше измеренного) в закладке меню → Programmer → Settings → Power.
Рис. 26. Измерение (слева) и установка (справа) VDD напряжения программатора PIC-KIT3 программой MPLAB IDE v8.92.
Пример MPLAB сообщения успешного подключения микроконтроллера к программатору по команде меню → Programmer → Reconnect показан на Рис. 27.
Рис. 27. Сообщение MPLAB об успешном подключении микроконтроллера к программатору.
Можно программировать не только отдельный PIC контроллер, но и контроллер, находящийся в составе рабочего устройства. Для программирования PIC контроллера в составе устройства необходимо предусмотреть установку перемычек и токоограничивающих резисторов как показано на Рис. 28 [3].
Рис. 28. Подключение микроконтроллера в составе электронного устройства к программатору.
Заключение
Малоразрядные PIC-контроллеры имеют широкий диапазон питания, низкое потребление и малые габариты. Они программируются на языках низкого уровня. Разработка программ на языке графического программирования Simulink с использованием многочисленных библиотек значительно сокращает время разработки и отладки в сравнении с программированием на уровне ассемблера. Разработанные для PIC-контроллеров Simulink структуры можно использовать и для компьютерного моделирования динамических систем с участием контроллеров. Однако, из-за избыточности кода такой подход применим только для семейств PIC контроллеров с достаточными ресурсами.
Не работает AVR USB Программатор? Настроим / Habr
Не работает программатор
Данная статья написана для тех, кто только начинает учиться программировать микроконтроллеры.
Гуру микроконтроллинга здесь делать нечего, а вот новичкам, столкнувшихся с проблемами китайского производства. Или нелепой фасовкой готовых программаторов или людей делающих первый шаг в радиоэлектронику эта статья может быть весьма-весьма полезной. Я так же опишу методы поиска неисправностей, с которыми столкнулся сам. Не у всех людей есть выдержка, тем более Интернет для этого и создан, что бы делиться опытом, не так ли?
Не работает программатор AVR — тысячи запросов в Яндексе и Гугл. Не работает USB asp — еще больше. Сотни сайтов, на которые попадаешь и везде читаешь одно и тоже, как кто то собирает очередной программатор, но ни кто, повторюсь НИ КТО не пишет, почему не работает именно твой личный девайс.
Быстрое решение. Для тех, кто не желает читать весь пост, а на быструю руку пришел за поиском решения выкладываю эту картинку. Обвожу изменения сделанные мной и не описанные ни на одном сайте.
Описание и подробности будут ниже.
Покупка и внешний вид
Посещая радио-рынок в нашем городе наткнулся я на конструктор Радио-Кит — аналог известного Радио-Кот. Поторговавшись с любезной мадам, выкупил сие чудо за 65 украинских тугриков — 8.2 долл. Вот фото.
Дальше предстояло все это собрать и спаять — благо это дело я люблю, и на пайку ушло полчаса — час.
Итак. Мы собрали все, что было в пакете, спаяли по инструкции — у нас получился USBasp программатор. Подключаем его к компьютеру и о боже — Неизвестное устройство. Поиск «программатор USBasp неизвестное устройство» и получаем сотни обсуждений на форуме, где такие же, как и я обманутые или молодые и неопытные юзеры, желающие начать программировать микроконтроллеры — попадают в засаду. Ужас. Еще раз проверяем все ли правильно спаяно и не спаяли ли мы вместе две ножки AtMega8 контроллера? Нет? Правильно ли припаяли все микросхемы? Мы не будем останавливаться на этой ерунде, ведь если да — то вам стоит скачать энциклопедию юного радиолюбителя и читать. Как делал я в свое время. Но мой программатор был спаян идеально. Мультиметром я прозвонил каждую дорожку и проблем не обнаружил! И начал искать в Интернете ответ. Тем более что я не новичок в этом деле. В 2005 году я впервые столкнулся с программированием PIC контроллеров для спутниковых карт. Даже откопал древний программатор UNIPROG 2003. Вот фотки — раритет. Работал как часы. Я еще школьником был, а столько карт перешил.
Достаешь контроллер с карты, вставляешь его в специальную карту с мостиком, вставляешь карту в программатор, и PonyProg творит чудеса на 700м целероне. Вставляешь обратно карту в тюнер — каналы раскодированные. Чудо техники было на то время. Вот фото.
Решение проблемы
Дело в том, что в инструкции и на всех сайтах, где рекламируют этот программатор — советуют не ставить джампер — перемычку JP3 — в моей инструкции написано: «Перемычка ставиться в случае перепрошивки внутреннего контроллера ATMega8» Я и так долгое время грешил на то, что контроллер не прошит. И продавец просто всунул в пакет чистый чип. Но через пару часов, когда начал искать в плате пробел или обрыв — заметил маленькие полосочки и четыре дырки, соединяющие 20ю и 4ю ножку Меги8.
Выход SCK и 19ю ножку Меги8.
Почему так, вы скоро поймете. Вот скриншоты с обведенными в кружочек местами.
Как вы заметили на первой и предыдущей картинке — кроме двух перемычек я обвел еще и джампер. В комплекте повторюсь, не было ни джампера ни перемычки. Её пришлось докупать отдельно, цена 5грн за 40 ячеек. Джампер был в старой материнской плате. Повторюсь в инструкции и схеме — он НЕ НУЖЕН. Но разобравшись со схемой понимаешь что программируемый чип не получает питание +5V. Очень небрежная ошибка производителей. Припаяйте перемычку и замкните джампер.
Внимательно изучите основную работу чипа. Основные ножки:
1 ножка — RESET
17я — MOSI
18z — MISO
19 — SCK
20 — AVCC ( в инструкции к программатору именовалась как VTG)
RESET — МИНУС а VCC — ПЛЮС ( исправьте если я не прав)
На одном сайте вычитал, что при программировании чипов питание должно подключаться ко всем ножкам VCC (AVCC)
Как работает программатор
Самый глупый и самый главный вопрос возникший у меня и сотни других новичков в Интернете купивших микроконтроллер скажем ATTINY2313 и программатор — что дальше? И вот на этот вопрос так же мало ответов в сети. Очень мало фотографий реально работающей схемы. Специально для неопытных, только начинающих знакомиться с этим удивительным миром пару фотографий, что еще необходимо для прошивки чипа:
Как вы видите на фотографии нам необходимо следующее:
-Кабель, соединяющий USBasp программатор с самим контроллером(на фото он на плате с кварцевым генератором( в чипе уже есть свой генератор)
Плата собрана по статье с сайта Простая отладочная плата для устройств AVR ATTiny2313 с кварцем
-Как вы поняли, что бы выходы из программатора MOSI, MISO, USCK, VCC(VTG) и RESET подключались к выходам на настроечной плате, где установлен программируемый чип. На многих ATMEL’овских контроллерах 1я ножка RESET напротив — 4 ножки подряд ( сверху вниз с 20й по 17ю) идут VCC, SCK, MISO, MOSI. То есть в ATTINY2313 — 20ножка VCC, 19 — USCK, 18-MISO, 17-MOSI.
Соедините выход на программаторе и плату с установленным чипом соответственно.
Если вы хотите узнать расположение и распиновку чипа — вы можете скачать ДАТАШИТ любого контроллера с сайта alldatasheet.com Вот даташит на ATTINY2313
В TINY13 и в 2313 и в МЕГЕ8 одинаковая распиновка для программного ISP программирования. Только питание придется менять на плате. Но не для каждого контроллера. Например, TINY13 — так же идеально работает и без кварца на той же плате что я сделал по статье для 2313. MOSI MISO SCK VCC RESET в одинаковых местах. Так что одной платы хватит пока для тестов.
Послесловие
После проделанных манипуляций. Измерения подающего на плату от программатора питания. После того как я разобрался в каждой ножке и допаял третий джампер — наконец-то заработал мой программатор. Он определился компьютером после припайки двух металлических дорожек — как libusb-win32 devices. Но работать не хотел.
Extreme Burner писал «Cannot Comunicate with TargetChip». Я не буду писать, сколько методов я использовал, когда думал что проблема в драйверах — сотню. Даже посоветовали войти в безопасный режим и установить программу по подписыванию драйверов — но он определялся как неизвестное устройство. Вот определился, но не работал. У кого таже проблема вы поняли, да?
И на всех схемах JP3 — ТОЛЬКО для перепрошивки внутреннего чипа. Это так. Но и питание через него необходимо подавать на программируемую плату.
Повторюсь ГУРУ — эта статья для новичков. Если можете дополнить статью, или подправить я буду только рад, так как сам еще новичок. Но очень много людей не могли толком ответить на данную проблему ни в одном из форумов. Даже перечитал все англоязычные форумы.
Даже спаял Программатор Громова. Но деньги та уже потрачены — необходимо довести до ума. Вот им и посвящается данная статья. Спасибо за внимание