
1.3 Определение приведенного момента движущих сил
Приведение моментов сил осуществляется на основе метода приведения сил. В основу метода положено равенство элементарных работ реальных сил, действующих в механизме и суммарного приведенного момента всех сил.
Момент приведенный от движущих сил определяется из соотношения:
, где Vqb – передаточная функция.
Для определения передаточной функции строим планы возможных скоростей. Зададимся отрезком изображающим скорость точки А кривошипа равным 50 мм. Скорости точек В и С находим из векторных уравнений:
Значения передаточных функций и приведенного момента движущих сил приведены в таблицах 1.2, 1.3, 1.4:
Передаточные функции цилиндра компрессора и двс в приложении.
1.4 Определение приведенного момента сил сопротивления
Момент приведенный от сил сопротивления определяется из соотношения:
, где Vqc

Значения передаточных функций и приведенного момента сил сопротивления приведены в таблицах 1.2, 1.3, 1,4.
1.5 Определение суммарного приведенного момента
Суммарный приведенный момент определяется как сумма приведенного момента движущих сил и приведенного момента сил сопротивления:
Значения суммарного приведенного момента приведены в таблицах 1.2, 1.3, 1.4.
Суммарный приведенный момент см в приложении.
Вычисляем масштаб графика суммарного приведенного момента и масштаб этого графика по оси абсцисс:
Моментами, от действия сил тяжести звеньев пренебрегаем, так как их величина очень незначительна – менее 5 % от максимального суммарного приведенного момента.
1.6 Построение графика суммарной работы
Построение графика
работы движущих сил производится путем
графического интегрирования графика
приведенного момента движущих сил.
Отрезок интегрирования ОК выбираем равным 60 мм.
Построение графика работы сил сопротивления производится путем графического интегрирования графика приведенного момента сил сопротивления.
Отрезок интегрирования ОК выбираем равным 60 мм.
Режим установившийся следовательно работа движущих сил равна работе сил сопротивления. Полученный при графическом интегрировании график работы движущих сил необходимо растянуть по оси ординат в
Построение графика суммарной работы производится путем графического сложения графиков работы движущих сил и сил сопротивления
Масштаб графика работы определим по соотношению:
1.7 Определение приведенного момента инерции II группы звеньев механизма двс
Приведение моментов
инерции осуществили на основе метода
приведения масс.
Суммарный приведенный момент инерции всего механизма равен сумме приведенных моментов инерции всех его звеньев. Суммарный приведенный момент инерции второй группы звеньев (поршней 3 и 5 и шатунов 2 и 4) рассчитывается по формуле:
,
где I3Ппр — приведенный момент инерции поршня ДВС при его поступательном движении;
где I
I2Ппр — приведенный момент инерции шатуна 2 при его поступательном движении;
I4Ппр — приведенный момент инерции шатуна 4 при его поступательном движении;
I2Врпр — приведенный момент инерции шатуна 2 при его вращательном движении;
I4Врпр — приведенный момент инерции шатуна 4
при его вращательном движении.
Приведенные моменты инерции элементов при поступательном движении рассчитываются по формулам:
, где
Vi— скорость поступательного движения звена [м/с];
1 — угловая скорость кривошипа 1 [рад/с];
mi — масса звена [кг].
Приведенные моменты инерции шатунов 2 и 4 при их вращательном движении рассчитываются по формуле:
, где
i— угловая скорость звена [рад/с];
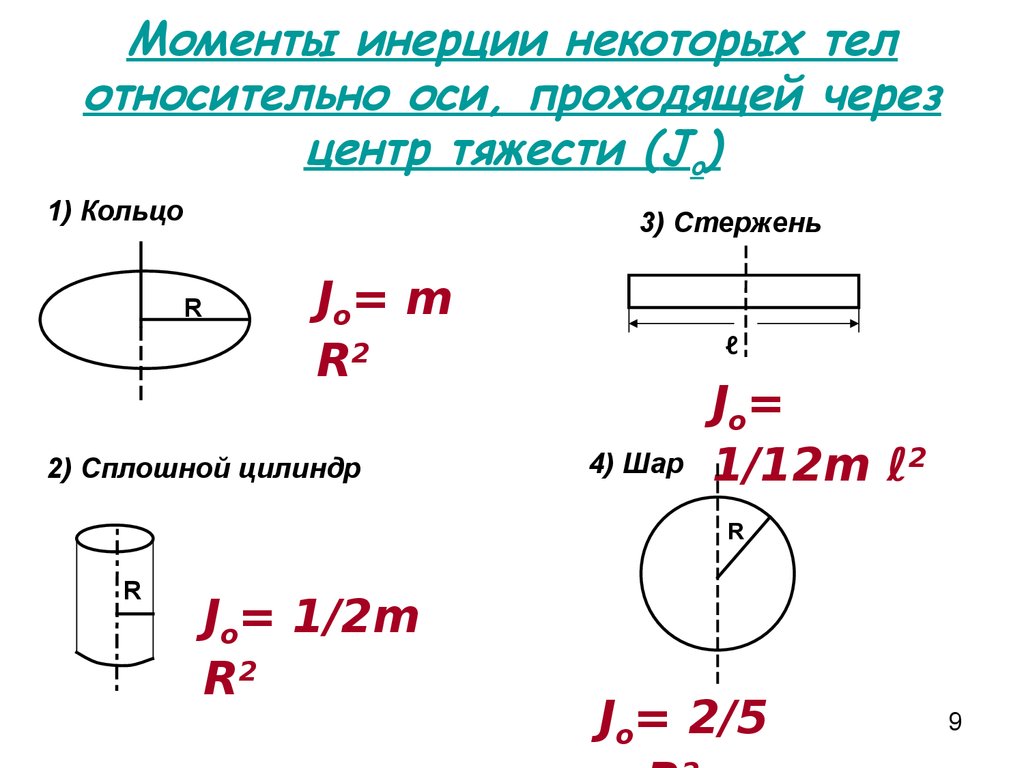
Iis -момент инерции звена относительно оси, проходящей через центр тяжести [кгм2].
Суммарный приведенный момент инерции всего механизма = + , где — приведенный момент инерции первой группы звеньев. Результаты расчетов представлены отдельно в виде группы таблиц и графиков
Вычислим масштаб графика суммарного приведенного момента инерции II группы звеньев:
1.
 4. Определение приведенного момента инерции звеньев.
4. Определение приведенного момента инерции звеньев.Исходные данные:
Таблица 1.4
Наименование параметра | Обозначение | Размерность | Числовые значения |
шатуна 2 коромысла 3 и уголкового сопла | G1 G2 G3 | Н Н Н | 13.73 5.886 12. |
Моменты инерции звеньев относительно осей, проходящих через их центры масс: звена 1 звена 2 звена 3 | J1S J2S J3S | кгм2 кгм2 кгм2 | 0,0017 0,0024 |
Момент инерции колеса 5 и приведенные к валу 5 моменты инерции планетарного редуктора и ротора двигателя | J5 | кгм2 | 0,005 |
 753
753 Приведенный
момент инерции
го
звена механизма найдем из условия
равенства кинетических энергий всех
звеньев механизма и звена приведения,
т.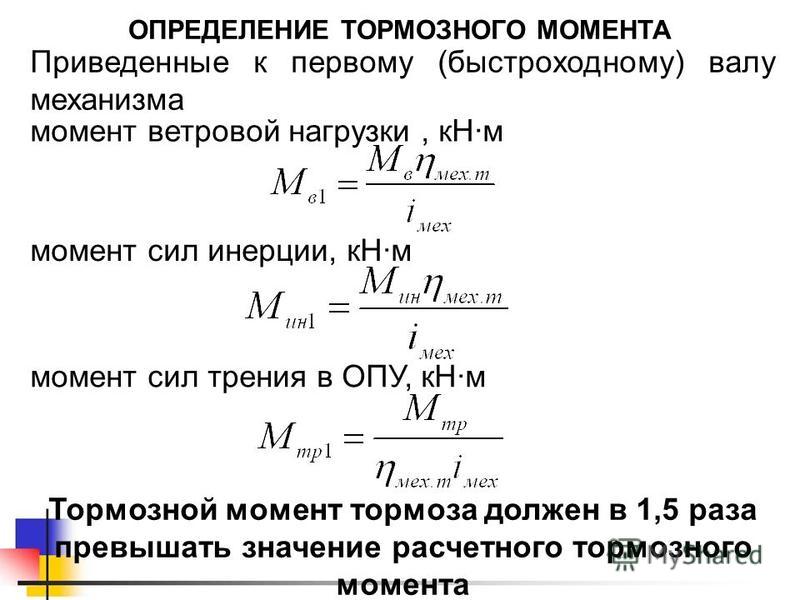 е. из закона сохранения кинетической
энергии.
е. из закона сохранения кинетической
энергии.
Для звена движущегося поступательно:
(9)
, (10)
если на вращающемся i—м звене задан момент инерции относительно оси, проходящей через центр массSi, а последний не совпадает с осью вращения k, то
.
При плоскопараллельном движении
(11)
Момент инерции суммарный приведенный механизма высчитывают по формуле:
, (12)
где – приведенный момент инерции первого звена;
— приведенный момент инерции второго звена;
—
приведенный момент инерции третьего
звена.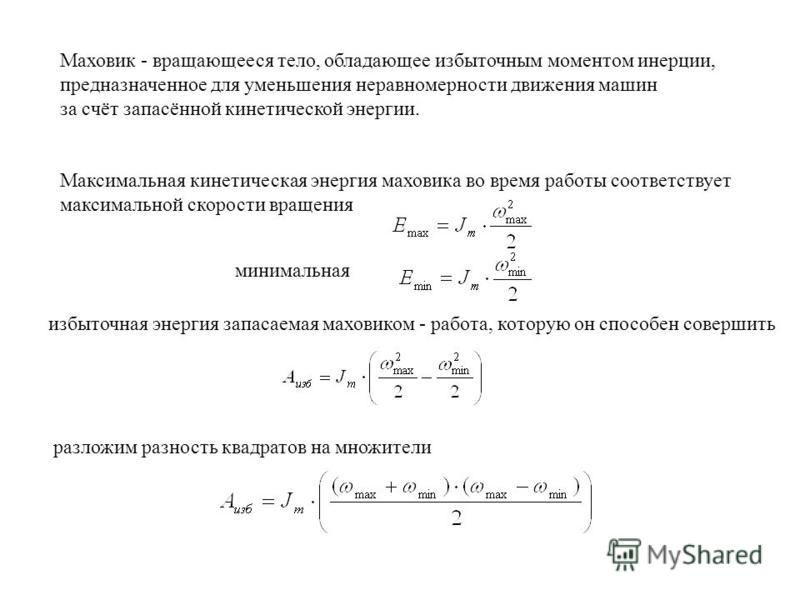
— приведенный момент инерции колеса 5 и приведенных к валу 5 моментов инерции планетарного редуктора и ротора электродвигателя.
Приведенный момент инерции первого звена: .
Приведенный момент инерции второго звена:
Приведенный момент инерции третьего звена:
Приведенный момент инерции колеса 5 и приведенных к валу 5 моментов инерции планетарного редуктора и ротора электродвигателя:
.
Результаты расчета приведенных моментов инерции для 8 точек приведены в таблице 1.5. Графики приведенных моментов инерции представлены на 1 листе.
N пол. | , град | |||||
1 | 0 | 1. | 0.360 | 0.000 | 20 | 22.060 |
2 | 27.00 | 1.7 | 0.455 | 0.761 | 20 | 22.916 |
3 | 54.00 | 1.7 | 0.592 | 1.999 | 20 | 24.291 |
4 | 81.00 | 1.7 | 0.615 | 2.228 | 20 | 24. |
5 | 108.00 | 1.7 | 0.549 | 1.649 | 20 | 23.898 |
6 | 135.00 | 1.7 | 0.328 | 0.932 | 20 | 22.960 |
7 | 162.00 | 1.7 | 0.406 | 0.320 | 20 | 22.426 |
8 | 189.00 | 1. | 0.353 | 0.000 | 20 | 22.053 |
 7
7 543
543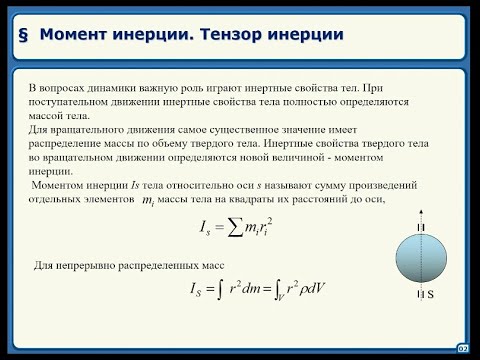 7
7Масштаб графика ;
Таблица 1.5
Из теоремы об изменении кинетической энергии:
, (13)
где — кинетическая энергия системы при угле звена приведения;
— кинетическая энергия системы в начальный момент, времени при угле ;
— работа, совершаемая над системой.
Подставляя выражения для ив уравнение теоремы об изменении кинетической энергии, и разрешая его относительно, получаем
. (14)
Учитывая, что в начальный момент времени механизм неподвижен, то есть , получаем выражение для расчета угловой скорости звена приведения
. (15)
(15)
Рассчитываем для различных положений механизма, по полученным значениям строим графикна листе 1. Результаты расчета приведены в таблице 1.6. Масштаб графика ;
Таблица 1.6.
N пол. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
, рад | 0 | 27.00 | 54.00 | 81.00 | 108.00 | 135. | 162.00 | 189.00 |
, радс-1 | 0 | 1.321 | 3.246 | 4.329 | 4.301 | 5.961 | 6.894 | 0 |
 00
00|
Навигация: Главная Случайная страница Обратная связь ТОП Интересно знать Избранные Топ: Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие… Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении. Интересное: Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны… Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений… Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления… Дисциплины: Автоматизация Антропология Археология Архитектура Аудит Биология Бухгалтерия Военная наука Генетика География Геология Демография Журналистика Зоология Иностранные языки Информатика Искусство История Кинематография Компьютеризация Кораблестроение Кулинария Культура Лексикология Лингвистика Литература Логика Маркетинг Математика Машиностроение Медицина Менеджмент Металлургия Метрология Механика Музыкология Науковедение Образование Охрана Труда Педагогика Политология Правоотношение Предпринимательство Приборостроение Программирование Производство Промышленность Психология Радиосвязь Религия Риторика Социология Спорт Стандартизация Статистика Строительство Теология Технологии Торговля Транспорт Фармакология Физика Физиология Философия Финансы Химия Хозяйство Черчение Экология Экономика Электроника Энергетика Юриспруденция |
⇐ ПредыдущаяСтр 7 из 8Следующая ⇒
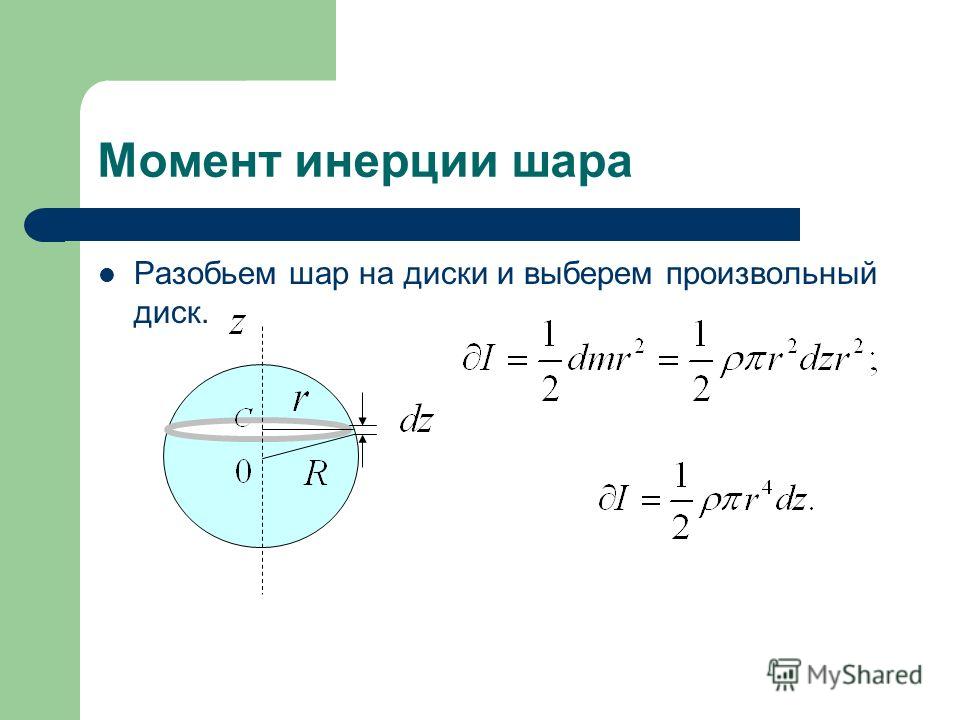
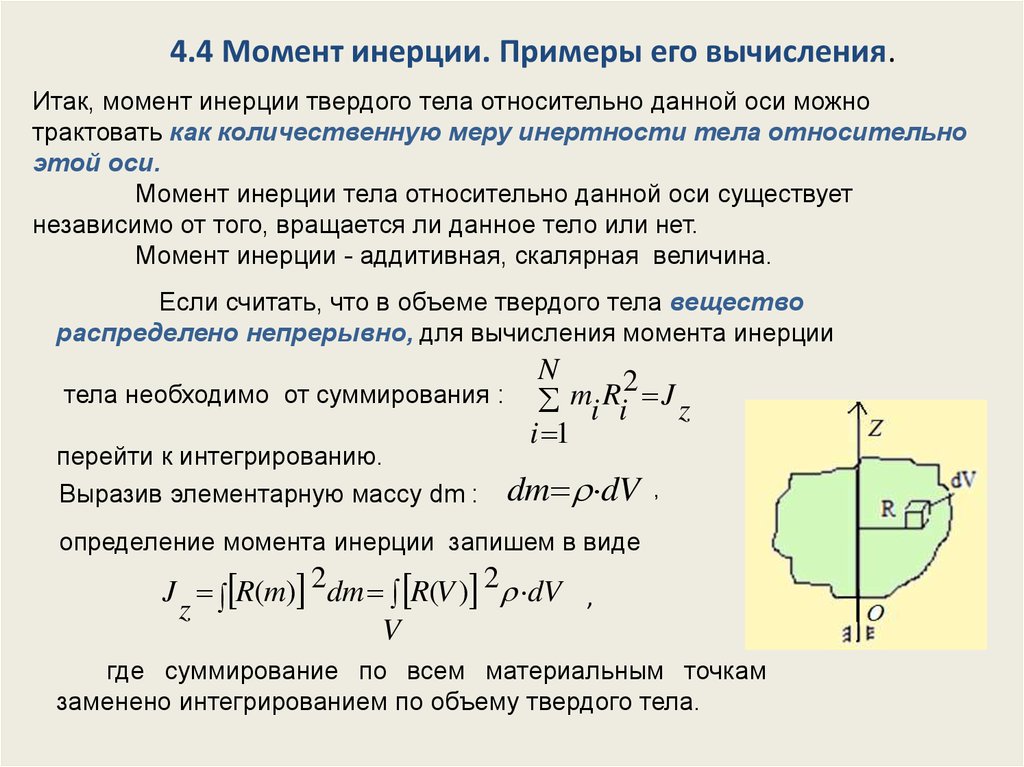
В этом разделе курсовой работы необходимо определить величину приведенного момента инерции – обобщенной характеристики инерционности механизма. Приведение масс и моментов инерции – это замена системы масс подвижных звеньев механизма приведенной массой, сосредоточенной в выбранной точке, или приведенным моментом инерции звена приведения, кинетическая энергия которого равна сумме кинетических энергий всех подвижных звеньев механизма. Приведение основано на эквивалентности мгновенных значений кинетической энергии звена приведения и всего механизма. Величина угловой скорости начального звена периодически колеблется относительно некоторого постоянного среднего значения ω1= const, так как во время работы механизма в течение одного оборота ведущего звена (кривошипа) силы, действующие на звенья, постоянно изменяются (за исключением сил тяжести), что влияет на угловую скорость кривошипа. Знание величины приведенного момента инерции механизма позволяет уравновесить механизм с помощью маховика. При этом можно обеспечить колебание угловой скорости кривошипа в соответствии с заданным коэффициентом неравномерности движения δ. Маховик – это вращающийся массивный сплошной диск (или шкив) с постоянным моментом инерции, кинетическая энергия которого равна кинетической энергии всего механизма. Маховик предназначен для обеспечения заданного коэффициента неравномерности движения δ. Кинетическая энергия звена, совершающего поступательное плоскопараллельное движение вместе с центром масс (рис. 4.1): (4.1) где mS – масса звена, кг; VS – скорость точки центра тяжести звена, м/с.
Рис. 4.1. Схема звена, совершающего поступательное плоскопараллельное движение: VS – скорость точки центра тяжести звена; S – центр тяжести звена
Кинетическая энергия звена, совершающего вращательное движение вокруг центра масс (рис. 4.2): (4.2) где ω – угловая скорость звена, 1/с; JS – момент инерции звена, кг·м2.
Рис. 4.2. Схема звена, вращающегося вокруг центра масс: ω – угловая скорость звена; S – центр масс
Кинетическая энергия звена, совершающего вращательное движение относительно оси вращения в точке О (рис. 4.3): (4.3) где ω – угловая скорость звена, 1/с; m – масса звена, кг; JS – момент инерции звена, кг·м2; JО – момент инерции звена относительно оси вращения О, кг·м2; lS – расстояние от центра вращения до центра масс, м. Величина чаще всего весьма мала, и ею, как правило, пренебрегают.
Рис. 4.3. Схема звена, вращающегося относительно оси вращения: ω – угловая скорость звена; lS – расстояние от центра вращения O до центра масс S
Кинетическая энергия звена, совершающего сложное движение (рис. (4.4) где ω – угловая скорость звена, 1/с; m – масса звена, кг; JS – момент инерции звена, кг·м2; VS – скорость точки центра тяжести звена, м/с.
Рис. 4.4. Схема звена, совершающего поступательное и вращательное движение: VS – скорость точки центра масс S; ω – угловая скорость звена
Если механизм имеет одну степень подвижности (W = 1), то его кинетическая энергия может быть выражена через кинетическую энергию приведенной к точке массы mпр или через приведенный момент инерции звена приведения Jпр (рис. 4.5).
Рис. 4.5. Приведение масс и моментов инерции подвижных звеньев механизма к приведенной массе или приведенному моменту: V А – скорость точки А; ω – угловая скорость звена; Jпр – приведенный момент инерции звена; mпр – приведенная масса звена в точке А
Для механизма с W = 1 кинетическая энергия приведенной массы к точке звена приведения: (4. а кинетическая энергия приведенного момента инерции к звену приведения, соответственно: (4.6) Так как кинетическая энергия механизма в каждый момент времени эквивалентна кинетической энергии приведенной массы или приведенного момента инерции звена приведения, то можно записать: Eпр = E. Общая кинетическая энергия механизма E для любого его положения равна сумме кинетических энергий всех подвижных звеньев: (4.7) где ωi – угловая скорость звена, 1/с; mi – масса звена, кг; JSi – момент инерции звена, кг·м2; VSi – скорость точки центра тяжести звена, м/с. Если равны левые части уравнений (4.5)–(4.7), то равны и их правые части: (4.8) Решая уравнения относительно mпр и Jпр, получим: (4. (4.10) Пример 7. Выполнить силовой и динамический анализ исполнительного рычажного механизма качающегося инерционного конвейера (см. рис. 2.2) для положения 5 по следующим исходным данным: частота вращения кривошипа n1 = 75 об/мин; размеры, м: l O1A = 0,2, lАВ = 0,6, l O2B = 0,5, lВC = 1,3, X0 = 0,45, Y0 = 0,1; массы звеньев, кг: m1 = 0,3, m2 = 0,7, m3 = 0,5, m4 = 0,4, m5 = 0,4; силы сопротивления движению ползуна при прямом ходе Fс = 3000 H. Решение 1. Приведенный момент сил определяем по формуле (3.5): 2. Требуемая мощность электродвигателя (Вт) при КПД привода ηобщ = 0,8: Выбираем электродвигатель с мощностью Рдв = 7,5 кВт (номинальная частота вращения nдв = 1455 об/мин). 3. Общее передаточное отношение для передаточного механизма (передаточное число редуктора): u = nдв/nкр = 1455/75 = 19,4. 4. Приведенный момент инерции звена приведения (кривошипа) вычисляется из условия, что кинетическая энергия этого звена равна сумме кинетических энергий всех подвижных звеньев механизма. Кинетическая энергия приведенного момента инерции к звену приведения определяется по формуле (4.6): Кинетическая энергия всех подвижных звеньев механизма: — звена О1А: — звена АВ: — звена О2В: — звена ВС: — звена С: Момент инерции подвижного звена: JSi = mi · pi2, где pi – радиус инерции звена, м, pi = 0,3li, li – длина звена, м. Таким образом, приведенный момент инерции звена приведения, кг·м2: ⇐ Предыдущая12345678Следующая ⇒ Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства. Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)… Папиллярные узоры пальцев рук — маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни… Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ — конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой… |
 ..
..
 4.4):
4.4): 5)
5) 9)
9)
 ..
..Модификаторы жесткости по МС 1893 (часть 1): 2016
Понятие модификаторов жесткости впервые введено в МС 1893 (часть 1): 2016. Пункт №. 6.4.3.1 кодекса определяет требования к структурному анализу. В пункте указано, что при расчете конструкций следует учитывать приведенный момент инерции для железобетонных конструкций. Для колонн следует учитывать 70 процентов Igross, а для балок — 35 процентов Igross. Этот пункт вызвал много вопросов среди группы инженеров-строителей. Общая цель написания этой статьи — собрать мнения/предложения более широкой группы инженеров. В следующем разделе я попытался дать ответы на несколько вопросов, полученных от разных инженеров. Ответы даны для зданий высотой менее 50 м . Сравнение модификаторов жесткости с IS 16700 : 2017 и IS 15988 : 2013 будет сделано в следующей статье.
Общая цель написания этой статьи — собрать мнения/предложения более широкой группы инженеров. В следующем разделе я попытался дать ответы на несколько вопросов, полученных от разных инженеров. Ответы даны для зданий высотой менее 50 м . Сравнение модификаторов жесткости с IS 16700 : 2017 и IS 15988 : 2013 будет сделано в следующей статье.
Q-1 Почему в коде введены модификаторы жесткости?
До этого пункта при расчете конструкции мы рассматривали 100% момента инерции для железобетонных балок и колонн. В элементе железобетона трещины будут образовываться в зоне растяжения бетона из-за приложения различных нагрузок. Из-за этих трещин момент инерции элемента RCC будет меньше полного момента инерции. Следовательно, для учета уменьшенного момента инерции сечения с трещиной в норму вводится понятие модификаторов жесткости.
Q-2 Почему значение модификатора жесткости выше для колонны, чем для балки? Характер и протяженность трещин будут существенно различаться от конструкции к конструкции и от элемента к элементу даже в одной и той же конструкции. Очень сложно присвоить уникальные значения модификаторов жесткости для разных элементов. Значения, предлагаемые в коде, основаны на многочисленных экспериментах и могут быть взяты из различных международных стандартов. Значение модификатора жесткости для колонны выше, чем для балки, так как колонны будут иметь большее осевое сжатие, чем балка. Следовательно, степень трещин будет меньше в колоннах по сравнению с балками. Следовательно, значение модификатора жесткости для колонн выше, чем для балок.
Очень сложно присвоить уникальные значения модификаторов жесткости для разных элементов. Значения, предлагаемые в коде, основаны на многочисленных экспериментах и могут быть взяты из различных международных стандартов. Значение модификатора жесткости для колонны выше, чем для балки, так как колонны будут иметь большее осевое сжатие, чем балка. Следовательно, степень трещин будет меньше в колоннах по сравнению с балками. Следовательно, значение модификатора жесткости для колонн выше, чем для балок.
По сравнению с моделью, использующей 100 % полного момента инерции, на результаты расчета конструкции будут оказываться два основных влияния:
1) Поскольку мы рассматриваем уменьшенный момент инерции, общая жесткость конструкции снизится. Из-за пониженной жесткости конструкция будет относительно гибкой и, следовательно, будет притягивать меньшие сейсмические силы.
2) Дрейф конструкции увеличится, поскольку она относительно гибкая.
Q-4 Требуются ли модификаторы жесткости только для анализа или также и для проектирования?
Модификаторы жесткости следует учитывать только при структурном анализе. Результаты анализа должны быть получены с учетом модификаторов жесткости. Конструктивный расчет должен быть выполнен по стандартной процедуре с учетом результатов анализа.
Q-5 Должны ли мы учитывать модификаторы жесткости для всех случаев нагрузки или только для сейсмических нагрузок?
Модификаторы жесткости, упомянутые в IS 1893 (часть 1): 2016, предназначены только для предельных условий, т. е. для случая сейсмической нагрузки. Те же самые модификаторы не следует рассматривать для других загружений.
Q-6 Необходимо ли учитывать значение модификаторов жесткости при кручении?
В соответствии с IS 1893 (часть 1): 2016, не следует учитывать уменьшение постоянной кручения, т. е. 100 % постоянной кручения следует учитывать при расчете конструкции.
В-7 Что произойдет, если мы рассмотрим уникальные модификаторы жесткости как для удобства эксплуатации, так и для предельных условий?
Как правило, модификаторы жесткости различаются по удобству эксплуатации и предельным условиям. Как обсуждалось выше, модификаторы жесткости, определенные в IS 1893 (часть 1): 2016, предназначены для предельных условий. Если учесть те же модификаторы жесткости и для условия работоспособности, то момент в стыке колонны балки будет больше, а пролетный момент меньше по сравнению с моделью без модификаторов жесткости. На мой взгляд, пролетный момент может оказаться неконсервативным, если учесть те же модификаторы жесткости для условия работоспособности.
Q-8 Требуется ли учитывать модификаторы жесткости для поперечной стены и плиты?
В настоящее время я думаю, что это не требуется для жесткой стены и плиты согласно IS 1893 (Часть 1): 2016. Это требуется только для железобетонных балок и колонн.
Как упоминалось выше, модификаторы жесткости следует учитывать только в случае сейсмической нагрузки. Расчет конструкции должен выполняться с учетом сейсмических нагрузок, имеющих модификаторы жесткости. После этого результаты анализа следует использовать для проектирования фундамента.
Учет модификаторов жесткости снизит требования к сейсмостойкости конструкции. Но в то же время это приведет к относительно более высоким сносам из-за повышенной гибкости конструкции. Величина модификаторов жесткости должна быть разной для эксплуатационной пригодности и предельных условий. Модификаторы жесткости следует использовать только для расчетов конструкций. Сравнение модификаторов жесткости с IS 16700: 2017 и IS 15988: 2013 будет сделано в следующей статье. Приведенные выше ответы основаны на моем понимании . Если у вас есть дополнительные вопросы/расхождения во мнениях, поделитесь подробностями в поле для комментариев ниже.
Уменьшение момента инерции и постоянной кручения участков с трещинами
Момент инерции и постоянная кручения уменьшение участков с трещинами
концепция необходимости уменьшения момента инерции :
Когда элементы конструкции нагружаются вертикальными и горизонтальными нагрузками и другими нагрузки, они имеют кривизну в сторону нагрузки, так как сечения этих элементы обладают определенной твердостью, в начале нагрузки находится в фазе упругой деформации, а затем повышенные нагрузки входят в пластическое поле, т.е. растрескивание и, следовательно, меньшая эффективная высота сечения (рассчитанная на основе инерции) Менее устойчив к увеличению деформаций в пластическом фазы, и поэтому это пластическое поведение (трещины) должно быть включено в конструктивные расчеты сооружения согласно требованиям код и теории структурного анализа известны.
в
теория упругости, можно проводить линейный анализ элементов конструкции
в упругой фазе (идеальный — без трещин), но с учетом
факторы снижения инерционности элементов, где ожидается появление трещин
возникают в результате горизонтальных и вертикальных нагрузок или при воздействии косвенных
действия, такие как тепловые, усадочные и опорные подушки и т. д. Инвестиции во время
расчетный срок службы конструкции.
д. Инвестиции во время
расчетный срок службы конструкции.
С эффект трещин, эффективная глубина сечения конструкции уменьшается и инерционный момент сечения (I) уменьшается и, следовательно, жесткость сечения (EI) уменьшается из-за растрескивания, что увеличивает величину вертикальных прогибов и горизонтальных Перемещения. Поэтому мы уменьшаем инерцию (I), чтобы приблизиться к фактическому реальность фактического поведения конструктивных разделов.
В нелинейный расчет, трещины автоматически учитываются при анализа и с большой точностью. Это можно сделать с помощью большого структурные программы.
Может
сделать вывод, что линейные и нелинейные решения обычно близки друг к другу,
в зависимости от типа структурного элемента и его важности и
регулярность и важность происхождения, а также типа и величины применяемых нагрузок,
который контролирует тип анализа, это стоимость и безопасность. Дизайн
Соображения обычного здания отличаются от соображений очень высокого
строительство, и опыт инженера-строителя имеет большое значение.
Дизайн
Соображения обычного здания отличаются от соображений очень высокого
строительство, и опыт инженера-строителя имеет большое значение.
В соответствии согласно ACI-11-8.7.1 твердость элементов (EI и GJ) должна быть определяется, чтобы отразить степень растрескивания элементов и нелинейность действие (неупругое действие), которое происходит с элементами до того, как они достигнут податливая стадия. Поэтому при линейном анализе конструкции код определяет коэффициенты снижения твердости конструкции элементы.
Когда при линейном анализе конструкции следует учитывать следующие характеристики: 90,5
Б)-Уменьшение инерция (I), следующим образом:
— Элементы, на которые в основном действуют силы давления:
0,70 ИГ | الاعمدة Столбцы |
0,70 ИГ | جدران غير متشققة Walls—Uncracked |
0,35 мкг | — متشققة — Cracked |
— Элементы, подлежащие изгибу:
0,35 мкг | الجوائز Балки |
0,25 мкг | Плиты и плиты плоские |
С) — общая площадь сечения, взятая во всех предыдущих расчетах
(Площадь = 0,1 Ag).
В соответствии с ACI-11-10.10.4.2 при наличии боковых нагрузок (землетрясений или ветра) или включены в анализ. Предыдущие номера элементов, подверженных давлению снова уменьшаются на величину (Bds + 1), где ( Bds) представляет собой отношение сдвиг из-за постоянных нагрузок (DL) к сдвигу в результате суммы нагрузок для при той же расчетной структуре нагрузки и на том же этаже, а ( βds) должно быть меньше чем один.
Если рассчитывается (βds), колонны и стены сдвига сокращаются в структурных структурах, принимая значения в диапазоне (0,6 → 0.8) в зависимости от вида и величины нагрузок, сейсмической зоны, элементарных пролетов, тип структуры (однородность) и другие факторы. Даже балки могут быть уменьшается на значения в диапазоне (0,4 → 0,6) по предыдущему индикаторы.
В целях
для выполнения расчета с использованием эксплуатационных нагрузок значение момента инерции (I) секций должно быть увеличено,
т. е. увеличение предыдущих понижающих коэффициентов на 1,0/0,70 = 1,43.
Поскольку предыдущие цифры сокращения относятся к факторизованным нагрузкам.
е. увеличение предыдущих понижающих коэффициентов на 1,0/0,70 = 1,43.
Поскольку предыдущие цифры сокращения относятся к факторизованным нагрузкам.
В В случае Т-образных балок рассчитывается либо эффективная ширина крыла, либо как вариант, значение момента инерции можно считать равным в два раза больше момента сечения без крыльев, т. е. в обоих случаях уменьшается на то же значение для прямоугольных балок, что и Уже. Приближенное решение можно сделать, пренебрегая работой крыльев в сопротивлении, при котором случае момент инерции его момента инерции (как в арабском коде) не будет уменьшенный.
Вставка эффекта трещин в программе iTabs:В Etabs, следует обратить внимание на уменьшение момента инерции для только инвестиционные нагрузки. Таким образом, статический анализ в Etabs зависит от матричного метода. которые зависят от метода упругости ( F = K * Δ ) , поэтому введение редукции коэффициенты факторных нагрузок дадут программе неверные результаты, и, таким образом, выводы будут достигнуто Далее :
1-
для инвестиционных нагрузок вводятся инерционные понижающие коэффициенты, т. е.
уравнения в приведенном выше коде ACI увеличены до 1,43 и читаются следующим образом:
е.
уравнения в приведенном выше коде ACI увеличены до 1,43 и читаются следующим образом:
— Элементы, на которые в основном действуют силы давления:
1,0 ИГ | الاعمدة Столбцы |
1,0 ИГ | جدران غير متشققة Walls—Uncracked |
0. 5 ИГ | — متشققة — Cracked |
— Элементы, подверженные изгибу:
0. | الجوائز Балки |
0,357 ИГ | البلاطات والبلاطات المسطحة Плоские листы и плоские плиты |
 5 ИГ
5 ИГКогда имеются боковые нагрузки (землетрясения или ветры в расчете), предыдущие цифры снова уменьшаются для элементов, подвергающихся давлению, на (Bds + 1), где βds представляет собой отношение сдвига из-за постоянных нагрузок (DL) к сдвигу в результате суммы нагрузок для одной и той же конструкции расчетной нагрузки. С тот же продуманный пол, βds должно быть меньше единицы.
в
случае T-Beams, для простоты они анализируются без учета
сопротивлением крыльев, и тогда влиянием трещин можно пренебречь. случае, если момент инерции не уменьшится
Т-образные сечения и
мы рассматриваем их как прямоугольные своего сечения ( ш * h) .
Вместо расчета стоимости (Bds) и тот факт, что значения очень близки к значениям в таблице и по коду FEMA_356 и по коду ACI. значения в FEMA могут быть приняты напрямую. Кроме того, трещины в стенах в слабых и сейсмические зоны средней интенсивности могут быть снижены до (0,5 → 0,7) .
Важное примечание:Программа ETABS не принимает во внимание Т-образные балки, если только они не определены как Тип Т.
11.3 Закон сохранения углового момента
Цели обучения
К концу этого раздела вы сможете:
- Применять закон сохранения углового момента для определения угловой скорости вращающейся системы, в которой момент инерции меняется
- Объясните, как изменяется кинетическая энергия вращения, когда в системе изменяются как момент инерции, так и угловая скорость
До сих пор мы рассматривали угловой момент систем, состоящих из точечных частиц и твердых тел. Мы также проанализировали задействованные крутящие моменты, используя выражение, которое связывает внешний чистый крутящий момент с изменением углового момента (рисунок). Примеры систем, которые подчиняются этому уравнению, включают свободно вращающуюся велосипедную шину, которая со временем замедляется из-за крутящего момента, возникающего в результате трения, или замедление вращения Земли в течение миллионов лет из-за сил трения, действующих на приливные деформации.
Мы также проанализировали задействованные крутящие моменты, используя выражение, которое связывает внешний чистый крутящий момент с изменением углового момента (рисунок). Примеры систем, которые подчиняются этому уравнению, включают свободно вращающуюся велосипедную шину, которая со временем замедляется из-за крутящего момента, возникающего в результате трения, или замедление вращения Земли в течение миллионов лет из-за сил трения, действующих на приливные деформации.
Однако предположим, что в системе отсутствует чистый внешний крутящий момент, [латекс] \sum \overset{\to }{\tau }=0. [/latex] В этом случае (Рисунок) становится законом сохранения момента импульса .
Закон сохранения углового момента
Угловой момент системы частиц вокруг точки в фиксированной инерциальной системе отсчета сохраняется, если вокруг этой точки нет чистого внешнего крутящего момента:
[латекс] \frac{d\ overset{\to}}{L}}{dt}=0 [/latex]
или
[латекс] \ overset {\ to {L} = {\ overset {\ to {l}} _ {1} + {\ overset {\ to {l}} _ {2} \ ,\text{+}\,\text{⋯}\,\text{+}\,{\overset{\to }{l}}_{N}=\text{constant}\text{. } [/ латекс]
} [/ латекс]
Обратите внимание, что общий угловой момент [латекс] \overset{\to }{L} [/латекс] сохраняется. Любой из отдельных угловых моментов может изменяться до тех пор, пока их сумма остается постоянной. Этот закон аналогичен сохранению импульса, когда внешняя сила, действующая на систему, равна нулю.
В качестве примера сохранения углового момента на (Рисунок) показан фигурист, выполняющий вращение. Чистый крутящий момент на ней очень близок к нулю, потому что между ее коньками и льдом относительно небольшое трение. Кроме того, трение возникает очень близко к точке поворота. Оба [латекс] |\overset{\to }{F}|\,\text{and}\,|\overset{\to }{r}| [/латекс] маленькие, поэтому [латекс] |\overset{\to }{\tau}| [/латекс] ничтожно мало. Следовательно, она может крутиться довольно долго. Она также может увеличить скорость вращения, стягивая руки и ноги. Почему стягивание рук и ног увеличивает скорость ее вращения? Ответ состоит в том, что ее угловой момент постоянен, так что 9{\prime} [/latex] должен увеличиваться, чтобы сохранить постоянный угловой момент.
Рис. 11.14 (a) Фигуристка крутится на кончике конька с вытянутыми руками. Ее угловой момент сохраняется, потому что чистый крутящий момент на ней пренебрежимо мал. (b) Скорость ее вращения сильно увеличивается, когда она вытягивает руки, уменьшая момент инерции. Работа, которую она выполняет, чтобы подтянуть руки, приводит к увеличению кинетической энергии вращения.
Интересно посмотреть, как изменяется кинетическая энергия вращения фигуристки, когда она сводит руки. Ее начальная энергия вращения равна 9{\prime } Таким образом, если бы она вытянула руки в исходное положение, она бы вращалась со своей первоначальной угловой скоростью, и ее кинетическая энергия вернулась бы к своему первоначальному значению.
Таким образом, если бы она вытянула руки в исходное положение, она бы вращалась со своей первоначальной угловой скоростью, и ее кинетическая энергия вернулась бы к своему первоначальному значению.
Солнечная система — еще один пример того, как в нашей Вселенной работает закон сохранения углового момента. Наша Солнечная система родилась из огромного облака газа и пыли, изначально обладавшего вращательной энергией. Гравитационные силы заставили облако сжаться, а скорость вращения увеличилась в результате сохранения углового момента ((Рисунок)).
Рисунок 11.15 Солнечная система образовалась из облака газа и пыли, которое первоначально вращалось. Орбитальные движения и вращения планет имеют то же направление, что и исходное вращение, и сохраняют угловой момент родительского облака. (кредит: модификация работы НАСА)
Мы продолжим наше обсуждение на примере, имеющем приложения к технике.
Пример
Спаренные маховики
Маховик вращается без трения с угловой скоростью [латекс] {\omega }_{0}=600\,\text{об}\текст{/}\текст{мин} [/ латекс] на вертикальном валу без трения с незначительной инерцией вращения. На него опущен второй маховик, который находится в состоянии покоя и имеет момент инерции, в три раза превышающий момент инерции вращающегося маховика (рисунок). Поскольку между поверхностями существует трение, маховики очень быстро достигают одинаковой скорости вращения, после чего вращаются вместе. (a) Используйте закон сохранения углового момента, чтобы определить угловую скорость [латекс] \ омега [/латекс] комбинации. б) Какая часть начальной кинетической энергии теряется при соединении маховиков?
На него опущен второй маховик, который находится в состоянии покоя и имеет момент инерции, в три раза превышающий момент инерции вращающегося маховика (рисунок). Поскольку между поверхностями существует трение, маховики очень быстро достигают одинаковой скорости вращения, после чего вращаются вместе. (a) Используйте закон сохранения углового момента, чтобы определить угловую скорость [латекс] \ омега [/латекс] комбинации. б) Какая часть начальной кинетической энергии теряется при соединении маховиков?
Рисунок 11.16 Два маховика соединены и вращаются вместе.
Стратегия
Часть (a) легко решить для угловой скорости связанной системы. Мы используем результат (а) для сравнения начальной и конечной кинетической энергии системы в части (б).
Раствор
а. На систему не действуют внешние моменты. Сила трения создает внутренний крутящий момент, который не влияет на угловой момент системы. Следовательно, сохранение углового момента дает 9{2}}=\фракция{1}{4}.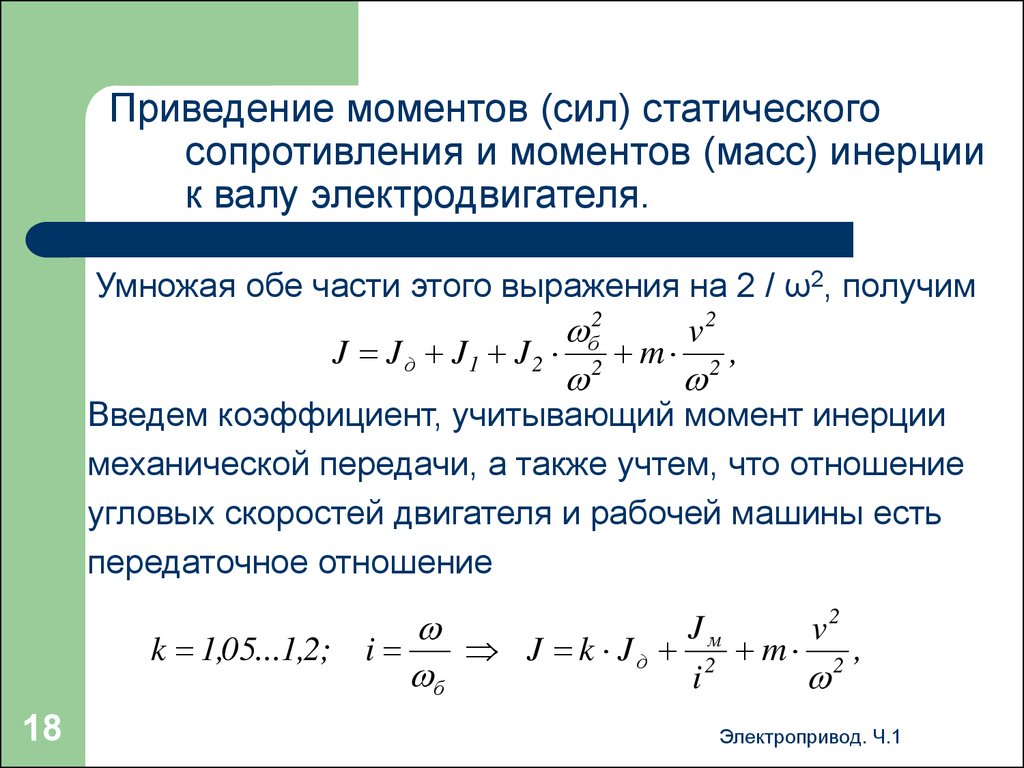 [/latex]
[/latex]
Таким образом, 3/4 начальной кинетической энергии теряется на сцепление двух маховиков.
Значение
Поскольку инерция вращения системы увеличилась, угловая скорость уменьшилась, как и следовало ожидать из закона сохранения углового момента. В этом примере мы видим, что конечная кинетическая энергия системы уменьшилась, так как энергия теряется на сцепление маховиков. Сравните это с фигуристкой на (рис.), выполняющей работу, сводя руки внутрь и добавляя кинетическую энергию вращения.
Проверьте свои знания
Карусель на детской площадке вращается со скоростью 4,0 об/мин. Трое детей запрыгивают и увеличивают момент инерции карусели/детской вращающейся системы на [латекс] 25% [/латекс]. Какова новая скорость вращения?
Показать раствор
Пример
Соскок с перекладины
Гимнастка весом 80,0 кг спрыгивает с перекладины. Он начинает соскок с полного выпрямления, затем делает несколько оборотов перед приземлением. Его момент инерции в полностью вытянутом состоянии может быть аппроксимирован стержнем длиной 1,8 м, а в сложенном виде — стержнем вдвое меньшей длины. Если его скорость вращения при полном выпрямлении составляет 1,0 об/с, и он входит в группировку, когда его центр масс находится на высоте 3,0 м, двигаясь горизонтально к полу, сколько оборотов он может сделать, если выйдет из группировки на высоте 1,8 м. ? См. (Рисунок).
Его момент инерции в полностью вытянутом состоянии может быть аппроксимирован стержнем длиной 1,8 м, а в сложенном виде — стержнем вдвое меньшей длины. Если его скорость вращения при полном выпрямлении составляет 1,0 об/с, и он входит в группировку, когда его центр масс находится на высоте 3,0 м, двигаясь горизонтально к полу, сколько оборотов он может сделать, если выйдет из группировки на высоте 1,8 м. ? См. (Рисунок).
Рисунок 11.17 Гимнастка спрыгивает с высокой перекладины и выполняет несколько оборотов в группировке перед приземлением в вертикальном положении.
Стратегия
Используя закон сохранения углового момента, мы можем найти скорость его вращения в группировке. Используя уравнения кинематики, можно найти интервал времени от высоты 3,0 м до 1,8 м. Поскольку он движется горизонтально по отношению к земле, уравнения свободного падения упрощаются. Это позволит рассчитать количество оборотов, которое может быть выполнено. Поскольку мы используем соотношение, мы можем сохранить единицы измерения как обороты в секунду и не нужно преобразовывать их в радианы в секунду.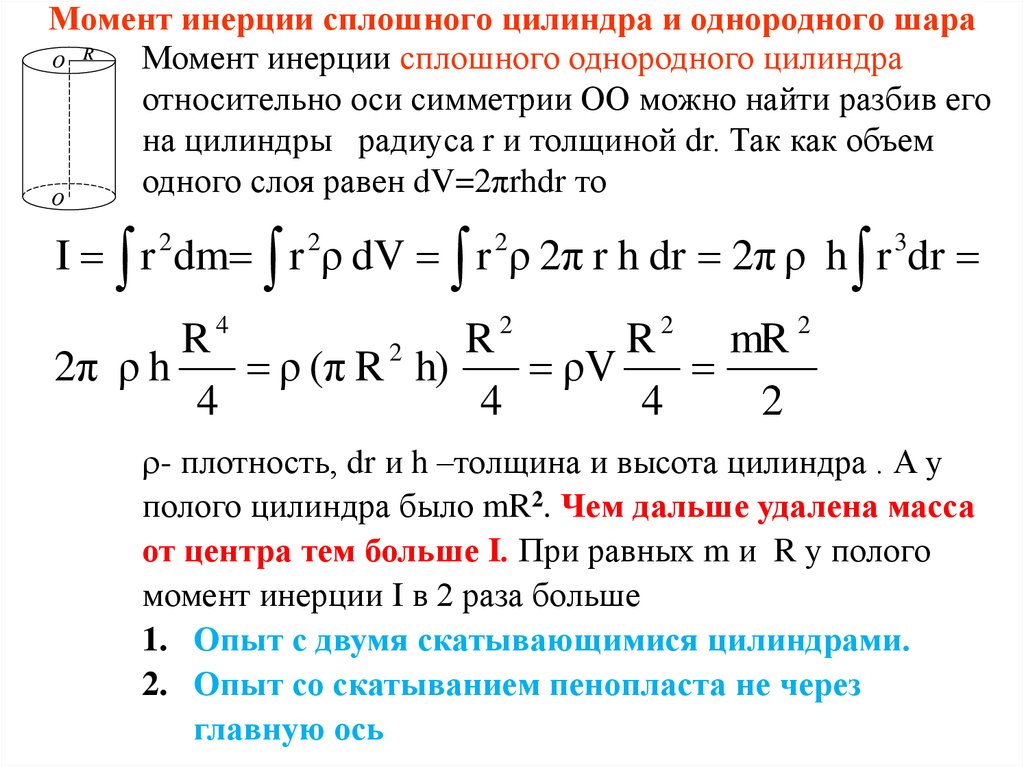 9{2}}=4.0\,\text{rev}\text{/}\text{s} [/latex].
9{2}}=4.0\,\text{rev}\text{/}\text{s} [/latex].
Временной интервал в сборке: [латекс] t=\sqrt{\frac{2h}{g}}=\sqrt{\frac{2(3.0-1.8)\text{m}}{9.8\,\text {m}\text{/}\text{s}}}=0,5\,\text{s} [/latex].
За 0,5 с он сможет совершить два оборота со скоростью 4,0 об/с.
Значение
Обратите внимание, что количество оборотов, которое он может совершить, будет зависеть от того, как долго он находится в воздухе. В задаче он выходит из перекладины горизонтально на землю. Он также мог выходить под углом к земле, что давало ему больше или меньше времени в воздухе в зависимости от угла, положительного или отрицательного, по отношению к земле. Гимнасты должны учитывать это при выполнении соскоков.
Пример
Сохранение углового момента при столкновении
Пуля массой [латекс] m=2.0\,\text{g} [/latex] движется горизонтально со скоростью [латекс] 500.0\,\text {м}\текст{/}\текст{с}. [/latex] Пуля попадает и застревает в краю твердого диска массой [латекс] M=3,2\,\text{кг} [/latex] и радиусом [латекс] R=0,5\,\text{м }\text{.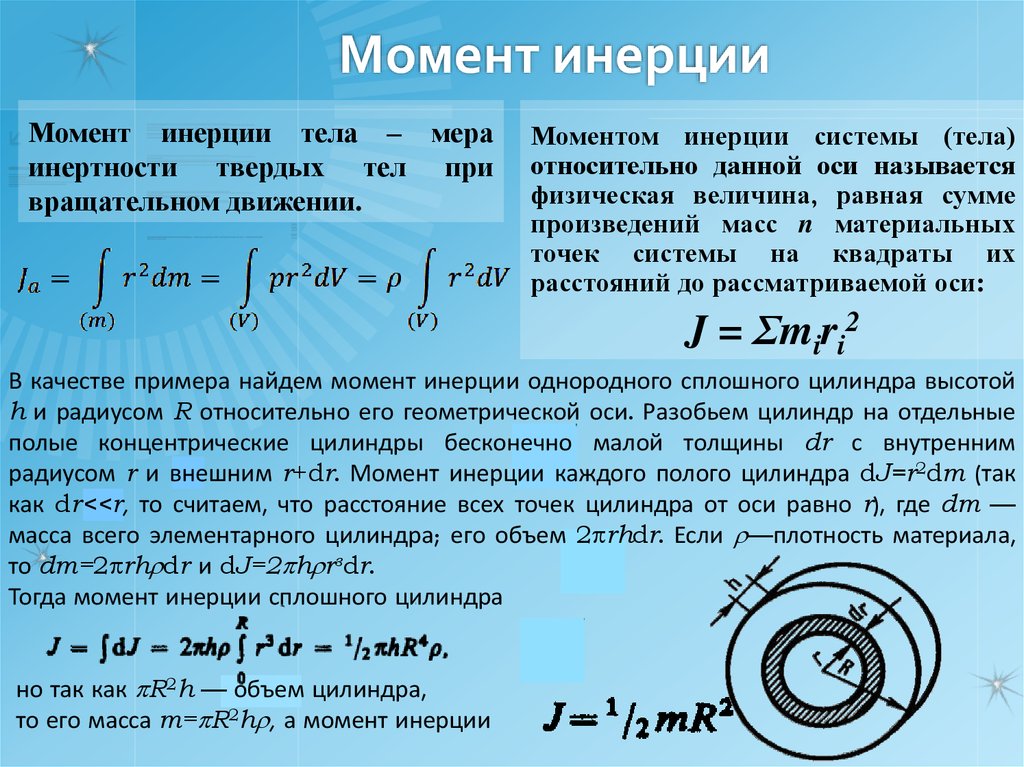 } [/latex] Цилиндр может свободно вращаться вокруг своей оси и изначально находится в состоянии покоя ((Рисунок)). Какова угловая скорость диска сразу после попадания пули?
} [/latex] Цилиндр может свободно вращаться вокруг своей оси и изначально находится в состоянии покоя ((Рисунок)). Какова угловая скорость диска сразу после попадания пули?
Рисунок 11.18 Пуля выпущена горизонтально и застревает в краю диска, который может свободно вращаться вокруг своей вертикальной оси.
Стратегия
Для системы пуля-цилиндр внешний крутящий момент не действует вдоль вертикальной оси, проходящей через центр диска. Таким образом, угловой момент вдоль этой оси сохраняется. Начальный угловой момент пули равен [латекс] mvR [/латекс], который берется относительно оси вращения диска за момент до столкновения. Начальный момент импульса цилиндра равен нулю. Таким образом, суммарный угловой момент системы равен [латекс] mvR [/латекс]. Поскольку момент импульса сохраняется, начальный момент импульса системы равен моменту импульса пули, застрявшей в диске сразу после удара. 9{-3}\,\text{кг}\,+\,1,6\,\text{кг})(0,50\,\text{м})}=1,2\,\text{рад}\text{/} \текст{ы}.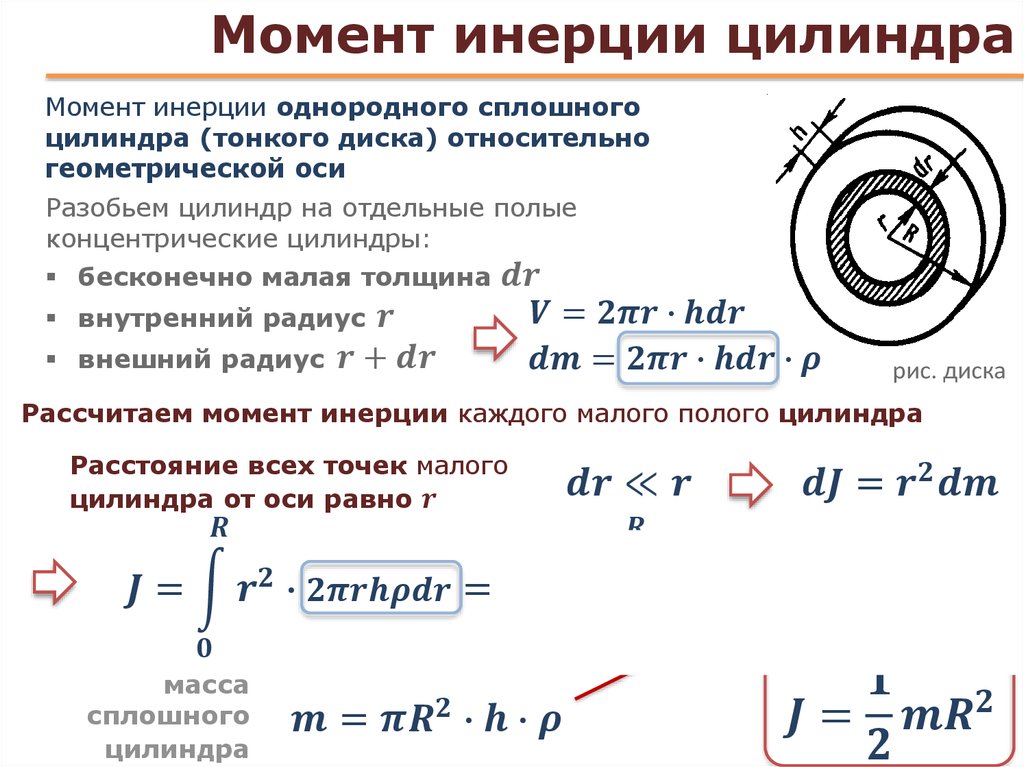 [/latex]
[/latex]
Значение
Система состоит из точечной частицы и твердого тела. Следует соблюдать осторожность при формулировании углового момента до и после столкновения. Непосредственно перед ударом угловой момент пули измеряется относительно оси вращения диска.
Резюме
- В отсутствие внешних крутящих моментов полный угловой момент системы сохраняется. Это вращательный аналог сохранения линейного количества движения, когда внешняя сила, действующая на систему, равна нулю.
- Для твердого тела, которое изменяет свой угловой момент в отсутствие чистого внешнего крутящего момента, сохранение углового момента дает [латекс] {I}_{f}{\omega }_{f}={I}_{i} {\omega}_{i} [/латекс]. Это уравнение говорит о том, что угловая скорость обратно пропорциональна моменту инерции. Таким образом, если момент инерции уменьшается, угловая скорость должна увеличиваться, чтобы сохранить угловой момент.
- Системы, содержащие как точечные частицы, так и твердые тела, можно анализировать с использованием закона сохранения углового момента.
 Момент количества движения всех тел в системе должен быть взят относительно общей оси.
Момент количества движения всех тел в системе должен быть взят относительно общей оси.
 Момент количества движения всех тел в системе должен быть взят относительно общей оси.
Момент количества движения всех тел в системе должен быть взят относительно общей оси.Концептуальные вопросы
Каково назначение маленького пропеллера в задней части вертолета, который вращается в плоскости, перпендикулярной большому пропеллеру?
Показать раствор
Предположим, ребенок идет от внешнего края вращающейся карусели внутрь. Угловая скорость карусели увеличивается, уменьшается или остается неизменной? Поясните свой ответ. Предположим, что карусель крутится без трения.
Когда веревка привязанного мяча обвивается вокруг шеста, что происходит с угловой скоростью мяча?
Показать решение
Предположим, что полярные ледяные щиты откололись и поплыли к экватору Земли, не тая. Что произойдет с угловой скоростью Земли?
Объясните, почему звезды вращаются быстрее, когда коллапсируют.
Показать ответ
Соревнующиеся дайверы втягивают конечности и сгибают тело, когда делают сальто.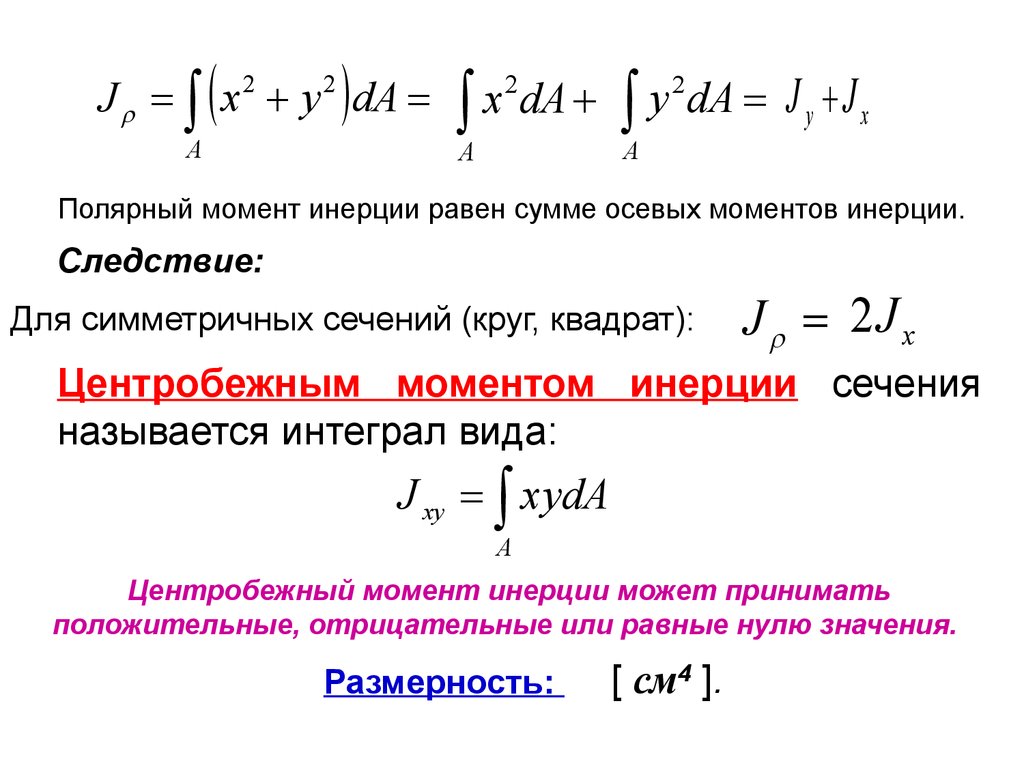 Непосредственно перед входом в воду они полностью вытягивают конечности, чтобы войти прямо вниз (см. ниже). Объясните влияние обоих воздействий на их угловые скорости. Также объясните влияние на их угловой момент. 9{2} [/latex] вращается против часовой стрелки вокруг той же оси с угловой скоростью [latex] {\omega }_{2}=8.0\,\text{rad}\text{/}\text{s} [/latex] . Если цилиндры соединены так, что они имеют одну и ту же ось вращения, какова угловая скорость комбинации? Какой процент первоначальной кинетической энергии теряется на трение?
Непосредственно перед входом в воду они полностью вытягивают конечности, чтобы войти прямо вниз (см. ниже). Объясните влияние обоих воздействий на их угловые скорости. Также объясните влияние на их угловой момент. 9{2} [/latex] вращается против часовой стрелки вокруг той же оси с угловой скоростью [latex] {\omega }_{2}=8.0\,\text{rad}\text{/}\text{s} [/latex] . Если цилиндры соединены так, что они имеют одну и ту же ось вращения, какова угловая скорость комбинации? Какой процент первоначальной кинетической энергии теряется на трение?
Прыгун с хайборда выполняет начальное вращение с полностью вытянутым телом, затем входит в группировку и выполняет три сальто назад, прежде чем удариться о воду. Если его момент инерции перед группировкой [латекс] 16,9{2} [/latex], какую скорость вращения он должен сообщить своему телу непосредственно от доски и перед группировкой, если ему требуется 1,4 с, чтобы выполнить сальто до удара о воду?
Показать раствор
Спутник Земли имеет апогей на высоте 2500 км над поверхностью Земли и перигей на высоте 500 км над поверхностью Земли.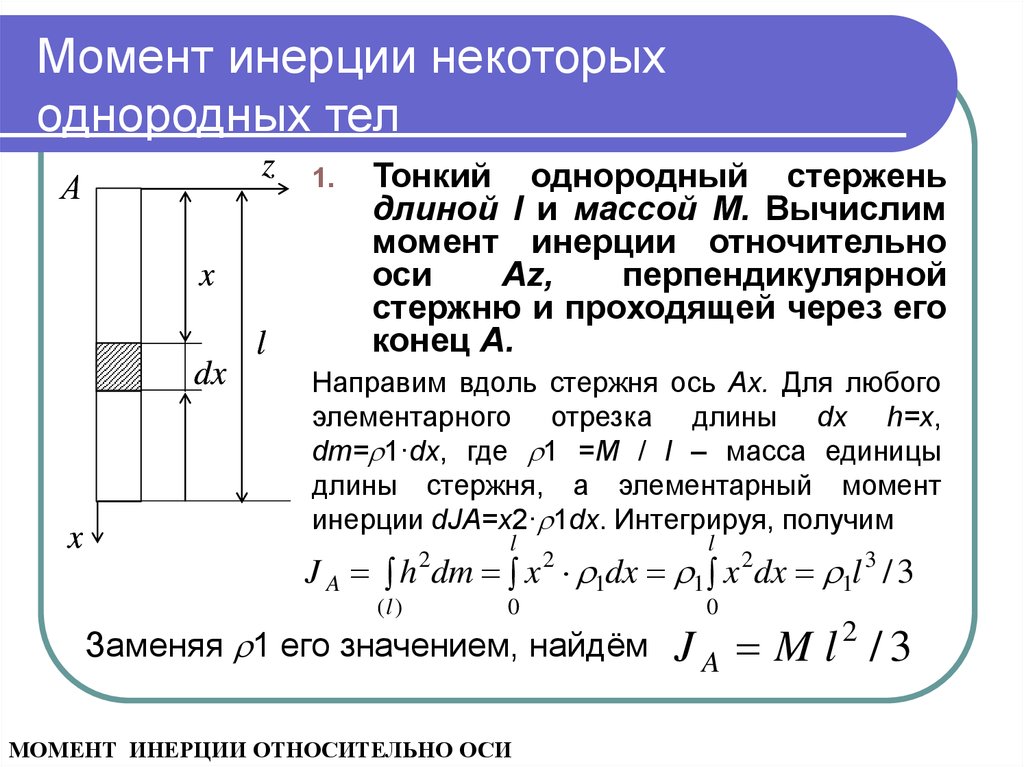 В апогее его скорость 730 м/с. Какова его скорость в перигее? Радиус Земли составляет 6370 км (см. ниже).
В апогее его скорость 730 м/с. Какова его скорость в перигее? Радиус Земли составляет 6370 км (см. ниже).
Орбита «Молния» — орбита спутника связи с большим эксцентриситетом, обеспечивающая непрерывное покрытие связью Скандинавских стран и соседней России. Орбита расположена таким образом, что эти страны имеют спутник в поле зрения в течение длительных периодов времени (см. ниже). Если спутник на такой орбите имеет апогей на высоте 40 000,0 км от центра Земли и скорость 3,0 км/с, какова будет его скорость в перигее, измеренная на высоте 200,0 км?
Показать ответ
Ниже показана маленькая частица массой 20 г, движущаяся со скоростью 10,0 м/с, когда она сталкивается и прилипает к краю однородного твердого цилиндра. Цилиндр может свободно вращаться вокруг своей оси, проходящей через его центр, и перпендикулярен странице. Цилиндр имеет массу 0,5 кг и радиус 10 см и изначально покоится. а) Какова угловая скорость системы после столкновения? б) Сколько кинетической энергии теряется при столкновении?
Жук массой 0,020 кг покоится на краю сплошного цилиндрического диска [латекс] (M=0,10\,\text{кг,}\,R=0,10\,\text{м}) [ /латекс] вращается в горизонтальной плоскости вокруг вертикальной оси, проходящей через ее центр. Диск вращается со скоростью 10,0 рад/с. Жучка ползет к центру диска. а) Чему равна новая угловая скорость диска? б) Как изменится кинетическая энергия системы? в) Если жук подползет к внешнему краю диска, какова тогда будет угловая скорость диска? г) Чему равна новая кинетическая энергия системы? д) В чем причина увеличения и уменьшения кинетической энергии?
Диск вращается со скоростью 10,0 рад/с. Жучка ползет к центру диска. а) Чему равна новая угловая скорость диска? б) Как изменится кинетическая энергия системы? в) Если жук подползет к внешнему краю диска, какова тогда будет угловая скорость диска? г) Чему равна новая кинетическая энергия системы? д) В чем причина увеличения и уменьшения кинетической энергии?
Показать решение
Однородный стержень массой 200 г и длиной 100 см может свободно вращаться в горизонтальной плоскости вокруг неподвижной вертикальной оси, проходящей через его центр, перпендикулярно его длине. В канавки вдоль стержня вставлены две маленькие бусины массой 20 г каждая. Первоначально две бусинки удерживаются защелками с противоположных сторон от центра стержня, на расстоянии 10 см от оси вращения. При таком положении бусинок стержень вращается с угловой скоростью 10,0 рад/с. Когда защелки отпущены, бусины выскальзывают наружу вдоль стержня. а) Какова угловая скорость стержня, когда бусины достигают концов стержня? б) Какова будет угловая скорость стержня, если бусины слетят со стержня? 9{2}.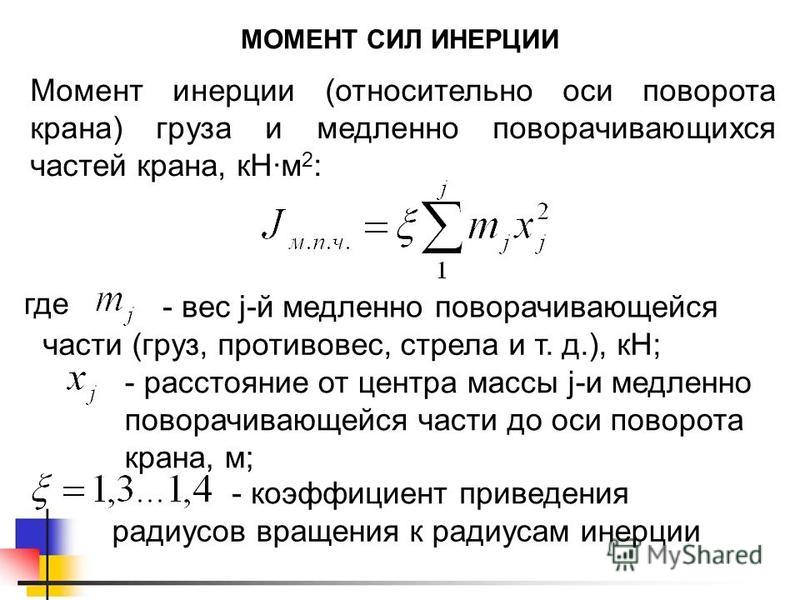 [/latex] Мальчик массой 50 кг бежит по касательной к ободу со скоростью 4,0 м/с и прыгает дальше. Если карусель изначально покоится, какова угловая скорость после того, как мальчик запрыгнет на нее?
[/latex] Мальчик массой 50 кг бежит по касательной к ободу со скоростью 4,0 м/с и прыгает дальше. Если карусель изначально покоится, какова угловая скорость после того, как мальчик запрыгнет на нее?
Показать раствор
Игровая карусель имеет массу 120 кг, радиус 1,80 м и вращается с угловой скоростью 0,500 об/с. Какова его угловая скорость после того, как ребенок массой 22,0 кг заберется на него, схватившись за внешний край? Сначала ребенок находится в состоянии покоя.
Трое детей катаются на краю карусели весом 100 кг, радиусом 1,60 м и скоростью вращения 20,0 об/мин. Дети имеют массу 22,0, 28,0 и 33,0 кг. Если ребенок массой 28,0 кг переместится в центр карусели, какова новая угловая скорость в об/мин? 9{2} [/латекс]. (b) Он уменьшает скорость вращения (свою угловую скорость), вытягивая руки и увеличивая момент инерции. Найдите значение его момента инерции, если его угловая скорость уменьшится до 1,25 об/с. (c) Предположим вместо этого, что он держит руки и позволяет трению льда замедлить его до 3,00 об/с. Какой средний крутящий момент был приложен, если это заняло 15,0 с?
Фигуристы-близнецы подходят друг к другу, как показано ниже, и берутся за руки. (a) Рассчитайте их конечную угловую скорость, учитывая, что начальная скорость каждого из них относительно льда равна 2,50 м/с. Каждый имеет массу 70,0 кг, и каждый имеет центр масс, расположенный на расстоянии 0,800 м от их сцепленных рук. Вы можете приблизить их моменты инерции к моменту инерции точечных масс на этом радиусе. (b) Сравните начальную кинетическую энергию и конечную кинетическую энергию.
Показать ответ
Бейсболист вытягивает руку вверх, чтобы поймать быстрый мяч со скоростью 40 м/с. Вес бейсбольного мяча 0,145 кг, длина руки ловца 0,5 м, масса 4,0 кг. а) Какова угловая скорость руки сразу после ловли мяча, измеренная от сустава руки? б) Какой крутящий момент будет приложен, если кэтчер прекратит вращение руки через 0,3 с после ловли мяча?
В 2015 году в Варшаве, Польша, Оливия Оливер из Новой Шотландии побила мировой рекорд, став самой быстрой спиннингисткой на коньках. Она достигла рекорда в 342 об/мин, побив существующий мировой рекорд Гиннеса на 34 оборота. Если фигуристка вытянет руки с такой скоростью вращения, какой будет ее новая скорость вращения? Предположим, что она может быть аппроксимирована 45-килограммовым стержнем высотой 1,7 м и радиусом 15 см при рекордном вращении. С ее вытянутыми руками примите приближение к стержню длиной 130 см с [латексом] 10% [/латекса] массы ее тела, выровненными перпендикулярно оси вращения. Силами трения пренебречь.
Показать решение
Спутник на геосинхронной круговой орбите находится на расстоянии 42 164,0 км от центра Земли. Небольшой астероид сталкивается со спутником, отправляя его на эллиптическую орбиту с апогеем 45 000,0 км. Какова скорость спутника в апогее? Предположим, что его угловой момент сохраняется.
Гимнастка делает кувырки по полу, а затем подбрасывает себя в воздух и выполняет несколько сальто в группировке, находясь в воздухе. Если ее момент инерции при выполнении колес составляет [латекс] 13,5\,\text{кг}·{\текст{м}}^{2} [/латекс] и ее скорость вращения составляет 0,5 об/с, сколько оборотов сделает ли она в воздухе, если ее момент инерции в группировке [латекс] 3,4\,\text{кг}·{\text{м}}^{2} [/латекс] и у нее есть 2,0 с, чтобы выполнить кувыркается в воздухе?
Показать решение
Центрифуга в Исследовательском центре Эймса НАСА имеет радиус действия 8,8 м и может создавать силы на своем полезном грузе в 20 90 285 г 90 286 с, что в 20 раз превышает силу гравитации на Земле.