
Принцип работы шагового двигателя — ООО «СЗЭМО Электродвигатель»
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах. Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Как работает шаговый электродвигатель
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
- После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
- Под воздействием импульсов вал перемещается под фиксированным углом.

- Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
- Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
- Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
- Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.
Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Виды шаговых двигателей
Существует несколько разных моделей шаговых двигателей. Если конструкция устройства предусматривает наличие постоянного магнита, принцип работы основан на притяжении или отталкивании статором и ротором электромагнитного мотора. В переменно-шаговом движке ротор изготавливается из железа. Минимально допустимое отталкивание в нем происходит при наименьшем зазоре, что обеспечивает притяжение точек ротора к полюсам магнитного статора. В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.
В переменно-шаговом движке ротор изготавливается из железа. Минимально допустимое отталкивание в нем происходит при наименьшем зазоре, что обеспечивает притяжение точек ротора к полюсам магнитного статора. В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.
Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели. В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
- униполярные;
- биполярные.
Механизмы первого типа оснащены одной обмоткой. Каждая фаза определяется центральным магнитным краном. При включении определенной секции обмотки обеспечивается нужное направление магнитного поля. Такая конструкция предусматривает работу магнитного полюса без дополнительного переключения, что обеспечивает предельно простую коммутацию цепи, равно как и направления тока. Для работы движка (с учетом фазного переключения) обычно достаточно трех проводов на фазу и шести для выходного сигнала.
Для подключения обмоток соединительные провода должны прикасаться к постоянным магнитам двигателя. При соединении клемм катушки вал проворачивается с трудом. Поскольку общий провод длиннее, чем провод, соединяющий катушки, сопротивление между торцами проводов и торцами катушек в два раза больше сопротивления между торцом катушки и общим проводом.
В механизмах второго типа есть только одна фазовая обмотка. Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Трехфазный шаговый двигатель устанавливается на фрезерных станках с ЧПУ, запускаемых с компьютера, и транспортных средствах, в которых используется дроссельная заслонка.
Подключение шагового двигателя
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам. В первом случае используется один центр-кран каждой обмотки и один конец провода. Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу. Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Благодаря высокой степени защиты шаговые двигатели успешно работают в тяжелых условиях.
Принцип работы шагового электропривода и шаговых электродвигателей. Их конструкция и применение | RuAut
Принцип работы шагового электропривода и шаговых электродвигателей
Электропривод, обеспечивающий преобразование числовой информации в дискретные механические положения называется шаговым. Электродвигатель с таким приводом работает от импульсных команд.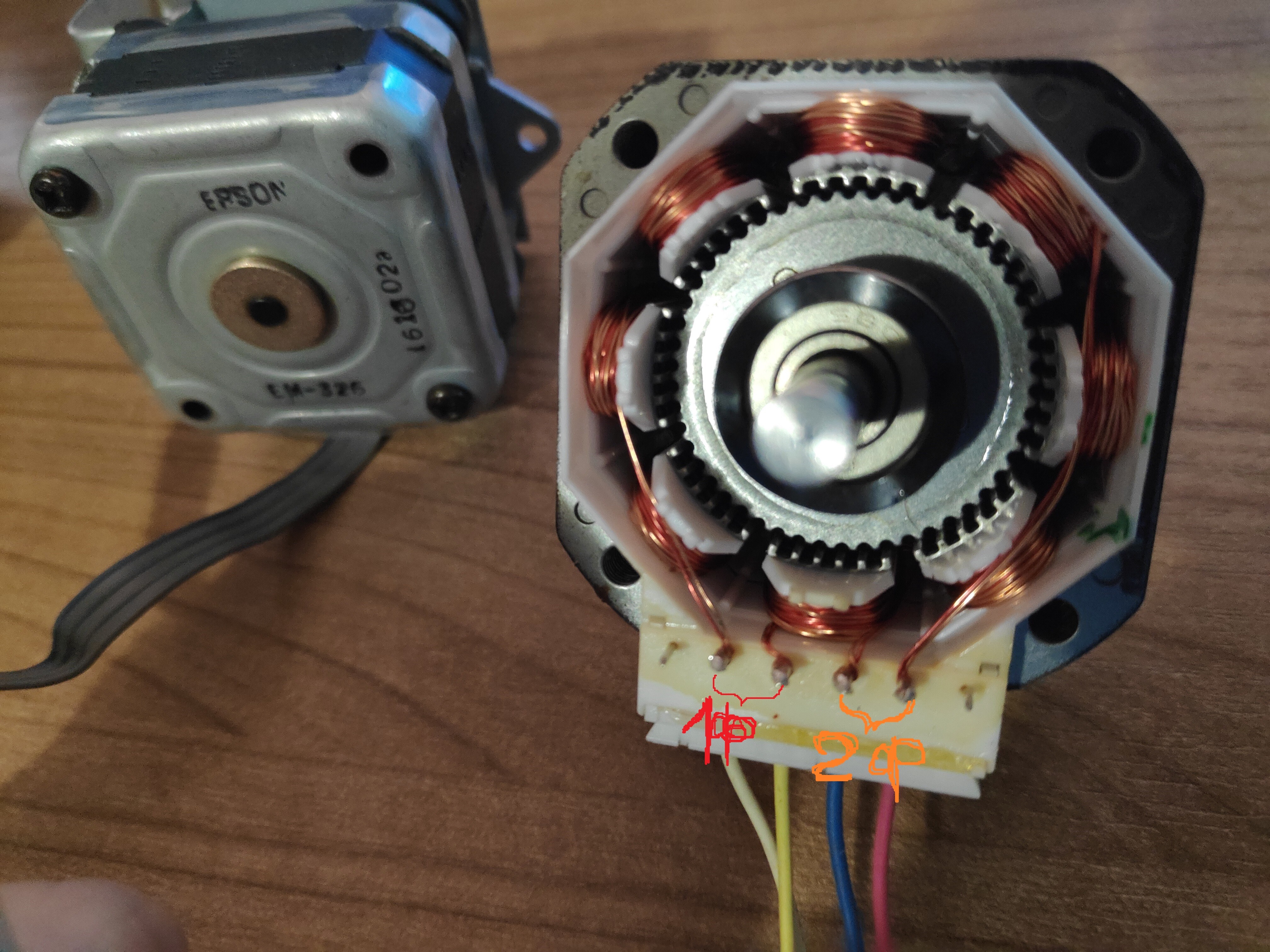
Принцип действия самого шагового электродвигателя можно рассмотреть на его упрощенной модели. Кольцевая обмотка статора электродвигателя, поворотные щетки, связывающие отпайки обмотки с источником питания. Роль щеток могут выполнять контактные или электронные ключи. Ось щеток и ось двухполюсного ротора в исходном положении совпадают. Сдвиг щеток характеризуется определенным углом, что вызывает поворот вектора магнитного поля на этот же угол. Ротор стремится догнать поле так, чтобы его ось совпала с осью щеток, то есть исключить динамическую ошибку.
Конструкция и применение шаговых двигателей
В соответствие с назначением электродвигателя пазы имеют различную конфигурацию. Ротор магнитоэлектрического двигателя имеет несколько пар полюсов магнитов, а индукторного большое число зубцов. Принцип работы электродвигателя: по катушке протекает ток, создавая электромагнитный поток, фиксирующий ротор по зубцам полюсного выступа. При выключении фазы 1 и включении фазы 2 вызывается сдвиг потока на электрический угол, равный 360 градусам, деленным на число фаз. Ротор поворачивается в положение наибольшей магнитной проводимости по отношению ко второму полюсу, на механический шаг равный 360 градусам, деленным на число фаз и на число зубцов пассивного ротора (или на число пар полюсов активного ротора).

Блоки управления промышленным шаговым приводом со сложными алгоритмами выполняются на компактных микросхемах. Создание схем со свойствами управляемого источника тока — инвертора тока, расширило рабочие частоты до 10-20кГц, что обеспечило ускоренное вспомогательное рабочее движение на станках ЧПУ. Во многих промышленных механизмах с дискретным движением требуется исключить колебания даже на холостом ходу. Для этого созданы схемы управления, обеспечивающие старт-стопное движение. Они вырабатывают дополнительные импульсы на торможение перед подходом ротора к очередной точке устойчивости. Такое управление позволило создать печатные автоматы, графопостроители и координатографы, специальную киноаппаратуру и другие устройства без сложной быстроизнашивающейся механики.
В некоторых устройствах необходимо использовать величину шага в несколько микрон, например в электронной технологии. Получение малых шагов за счет роста числа фаз или зубцов ограниченно. Сделать это позволяет электронное дробление самого шага. На специальной экспериментальной установке можно проследить за этим процессом. Токи в фазах меняются до установленного значения не сразу, а мелкими ступеньками или плавно по определенному закону. Соответственно происходит и плавный поворот результирующего вектора потока и угловой характеристики даже при низких частотах. На экране осциллографа можно отследить положение годографа тока. Кроме рассмотренных нами сложных шаговых электродвигателей применяемых в устройствах ЧПУ, существуют простейшие однофазные. Их основные преимущества — простота конструкции и малые габариты, один канал связи и минимальное потребление электроэнергии. Эти электродвигатели нашли широкое применение в электронных часах, приборах времени и других системах. Пуск и однонаправленное вращение этих двигателей обеспечивают несимметричные магнитопроводы и возбуждение от постоянных магнитов. Конструкция однофазных шаговых электродвигателей просты, но разработки новых образцов осложнены наличием постоянных магнитов и малыми габаритами.
На специальной экспериментальной установке можно проследить за этим процессом. Токи в фазах меняются до установленного значения не сразу, а мелкими ступеньками или плавно по определенному закону. Соответственно происходит и плавный поворот результирующего вектора потока и угловой характеристики даже при низких частотах. На экране осциллографа можно отследить положение годографа тока. Кроме рассмотренных нами сложных шаговых электродвигателей применяемых в устройствах ЧПУ, существуют простейшие однофазные. Их основные преимущества — простота конструкции и малые габариты, один канал связи и минимальное потребление электроэнергии. Эти электродвигатели нашли широкое применение в электронных часах, приборах времени и других системах. Пуск и однонаправленное вращение этих двигателей обеспечивают несимметричные магнитопроводы и возбуждение от постоянных магнитов. Конструкция однофазных шаговых электродвигателей просты, но разработки новых образцов осложнены наличием постоянных магнитов и малыми габаритами.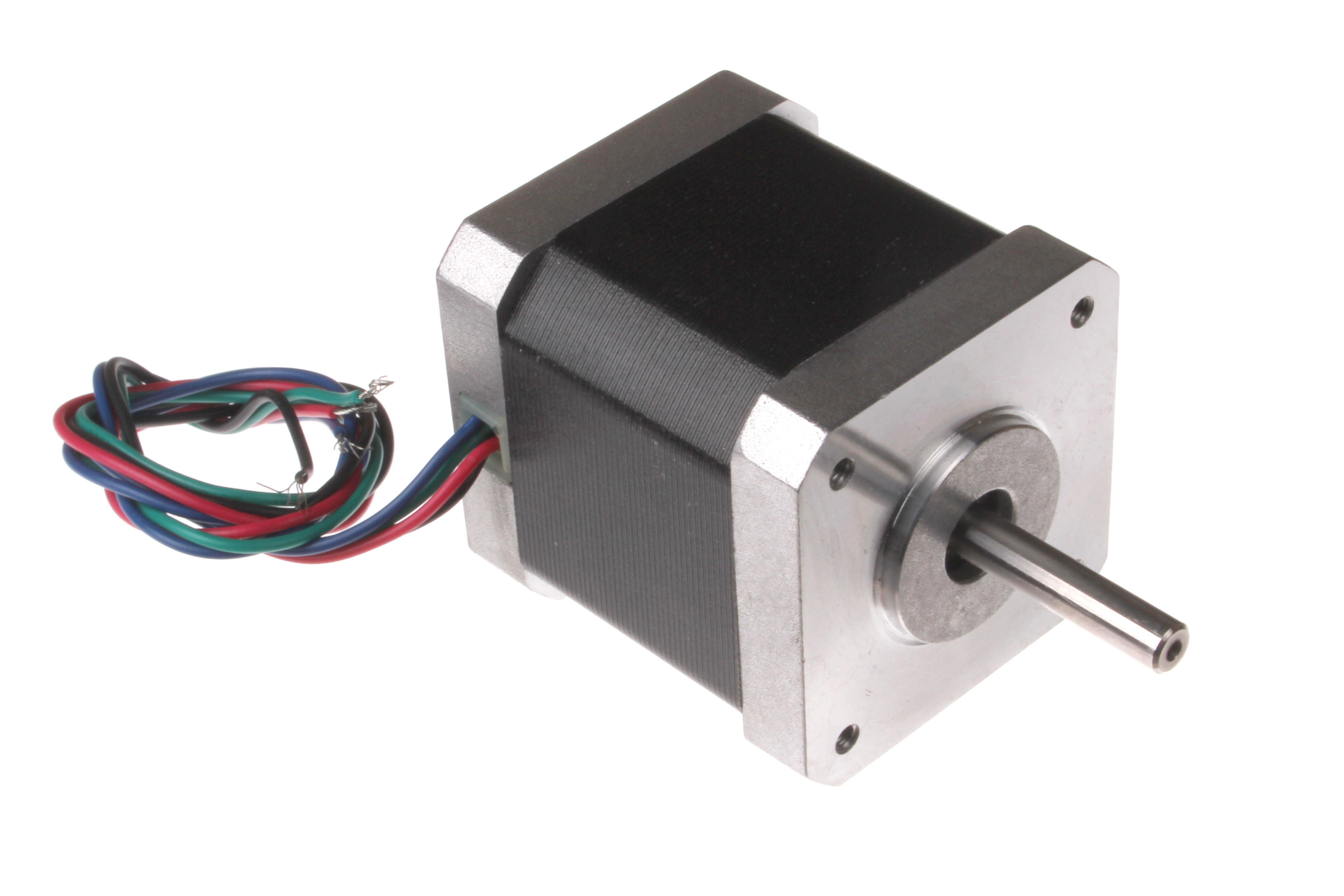
Так устроены и работают вращающиеся шаговые электродвигатели. Стремление исключить быстроизнашивающиеся дорогостоящие механические передачи вращающихся шаговых электродвигателей привело к созданию разнообразных конструкций линейных шаговых электродвигателей. Если вращающийся шаговый электродвигатель разрезать по образующей, то можно получить одностороннюю конструкцию плоского типа. Плоский, линейный шаговый электродвигатель, реализующий взаимопоступающее движение. Эту конструкцию можно преобразовать в цилиндрическую. Цилиндрические шаговые электродвигатели относятся к четырехфазным двигателям индукторного типа. Их принцип действия аналогичен вращающемуся электродвигателю, но зубцы на пористых выступах статора размещены вдоль продольной оси, а не по окружности. Это позволяет получить линейные шаги ротора индуктора. Цилиндрический шаговый электродвигатель выполнен из магнитной мягкой стали и имеет зубцы расположенные перпендикулярно его оси. Малую величину шага в этих двигателях можно получить за счет многофазных катушечных обмоток.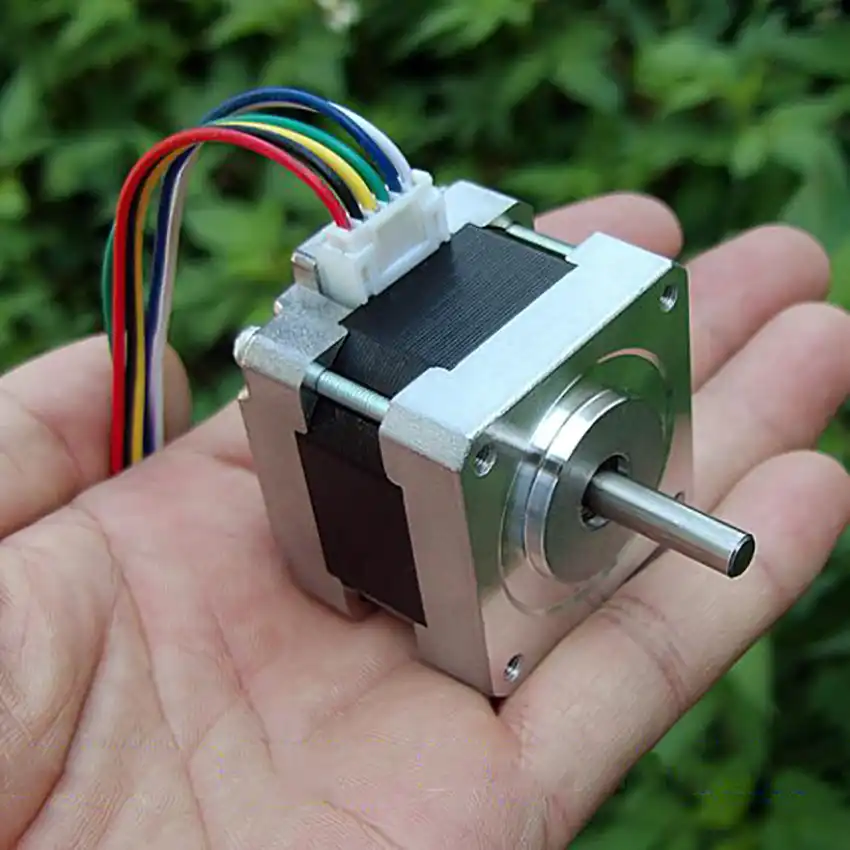 Гладкие концы вала индуктора укреплены в опорах скольжения или качения, что ограничивает длину хода.
Гладкие концы вала индуктора укреплены в опорах скольжения или качения, что ограничивает длину хода.
Плоский линейный шаговый электродвигатель
При возбуждении со стороны ротора — якоря, получаем шаговый двигатель активного типа. Со стороны статора — индукторный, который получил широкое применение. Ход плоского электродвигателя ограничен его длиной. Закрепив индуктор, получим перемещение магнитной системы. В индукторе некоторых электродвигателей профрезированы зубцы. Для уменьшения эксплуатационного зазора и улучшения эксплуатационных показателей линейных шаговых двигателей используются воздушные опоры. Сжатый воздух, проходя через калиброванные отверстия якоря, создает воздушную подушку 15-20 микрон. В ряде случаев предусматривается магнитная фиксация ротора при отключении питания. Разработано большое количество комбинированных электродвигателей. Так сочетание пары электродвигателей перпендикулярно в одной раме образуют планарный электродвигатель. Он может осуществлять двухкоординатное движение на плоскости, являющейся индукторами.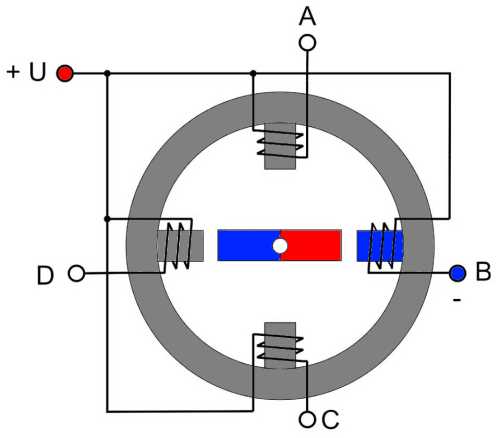 Большое усилие притяжения к плите позволяет такому двигателю работать в любом положении. Простота и однотипность физических процессов в шаговых двигателях, их конструктивная пластичность позволили разработать бесконтактные электромеханические и электронные модули, реализующие сложное многокоординатное движение без дорогостоящих и изнашивающихся кинематических преобразователей.
Большое усилие притяжения к плите позволяет такому двигателю работать в любом положении. Простота и однотипность физических процессов в шаговых двигателях, их конструктивная пластичность позволили разработать бесконтактные электромеханические и электронные модули, реализующие сложное многокоординатное движение без дорогостоящих и изнашивающихся кинематических преобразователей.

Шаговый Двигатель — Принцип Работы для Чайников
Каким образом роботизированный манипулятор на предприятии повторяет одни и те же движения снова и снова? Как автоматический фрезерный станок может двигаться с такой точностью? Это возможно благодаря шаговому двигателю. Особенность шагового двигателя заключается в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи, это простая и точная разомкнутая система.
Как работает шаговый двигатель с переменным магнитным сопротивлением
Для начала давайте разберемся, как работает шаговый двигатель с переменным магнитным сопротивлением, который является самым простым. Позднее мы рассмотрим устройство высокоточного и широко используемого типа двигателя. У этого двигателя 6 зубьев на статоре, которые могут быть запитаны от трех отдельных источников постоянного тока.
Ротор состоит из ряда стальных пластин. У него отличное от статора количество зубьев в данном случае их 4 это сделано намеренно, для того чтобы только одна пара зубьев ротора могла одновременно находиться напротив зубьев статора.
Вы и сами можете объяснить, как работает этот шаговый двигатель. Если обесточить обмотку A и запитать обмотку B станет ясно, что ротор будет двигаться, как показано на модели.
Из уроков геометрии понятно, что один шаг соответствует 30 градусам. Чтобы перейти к следующему шагу обесточим обмотку B и запитаем обмотку C.
После этого вновь запитаем обмотку A. То есть ротор занимает позицию с наименьшим сопротивлением.
Размер шага двигателя составляет 30 градусов, точность может быть доведена до 15 градусов при помощи одного простого приема, когда запитана обмотка A, ротор находится в таком положении мы знаем, что если запитать обмотку B он повернется на 30 градусов. Но что произойдет если обмотки A и B будут запитаны одновременно? Ротор займет положение между двумя этими обмотками, то есть повернется на 15 градусов.
После этого обесточим А. Когда ротор установится напротив обмотки B, запитаем обмотку С, такой тип работы называется режимом дробления шага.
Как работает гибридный шаговый двигатель
Двигатель который мы рассматривали, называется двигателем с переменным магнитным сопротивлением. Наиболее универсальными и широко распространенными являются гибридные шаговые двигатели. Рассмотрим работу стандартного гибридного двигателя с величиной шага в 1.8 градуса.
Гибридный двигатель имеет намагниченный по оси ротор со стальными зубчатыми наконечниками. Таким образом, одна сторона ротора является северным магнитным полюсом, а другая южным.
Точность данного двигателя заключается в продуманном расположении зубьев ротора и статора. Разберемся, как это работает. Ротор имеет 50 зубьев, чтобы понять, как расположены зубья статора для начала, предположим, что у статора тоже 50 зубьев. Однако на самом деле их на 2 меньше, чем у ротора. Таким образом у статор остается 48 зубьев.
Давайте разделим их на 4 группы попарно, как показано на модели (подробнее смотри на видео).
Теперь давайте выровняем эти группы, зеленая группа сдвигается так что она оказывается наполовину выровнены с зубьями ротора. Зубья желтой группы полностью смещены относительно зубьев ротора. Синяя группа наполовину выровнена относительно зубьев ротора. Красная группа остается на своем месте, то есть красная группа зубьев полностью выровнена с ротором, а желтая группа смещена. Две другие группы смещены лишь наполовину.
Две другие группы смещены лишь наполовину.
Следует помнить, что сторона ротора направленная к нам является южным магнитным полюсом. Обмотки статора соединяются следующим образом, они представляют собой две независимые группы обмоток. При подаче питания на обмотку A, статор образует следующую картину намагниченности. Одна пара полюсов статора действует как северный полюс, а другая как южный. Так как противоположные полюса притягиваются, они будут совмещены, полюса с одинаковой полярностью будут смещены.
Смотрите, что произойдет с ротором при подаче питания на обмотку B, он совершит вращение на небольшой угол чтобы вы равняться с новым северным полюсом. Очевидно, что этот угол составляет одну четвертую часть углового шага. Другими словами, ротор поворачивается на 1,8 градуса, затем задействуется обмотка A с противоположной полярностью и вновь ротор поворачивается на одну целую восемь десятых градуса.
Данный процесс повторяется и двигатель совершает высокоточные движения. Разрешение угла шага может быть улучшено при помощи дробления шага. Интересно отметить, что северные зубчатые наконечники находятся между южными зубчатыми наконечниками, таким образом гарантируется выравнивание полюсов с противоположными полярностями.
Разрешение угла шага может быть улучшено при помощи дробления шага. Интересно отметить, что северные зубчатые наконечники находятся между южными зубчатыми наконечниками, таким образом гарантируется выравнивание полюсов с противоположными полярностями.
Вот так работает гибридный шаговый двигатель, такие двигатели идеально подходят для применения в областях, где необходимы четкие движения и простое управление.
Принцип действия шаговых двигателей | Stepmotor
Биполярный шаговый двигатель
Силовые установки биполярного типа обладают двумя обмотками (одна — на одну фазу) и четырьмя выводами. Чтобы управлять направлением магнитного поля, используется специальный драйвер, обеспечивающий управление направлением движения электрического тока. Биполярная силовая установка обладают повышенными показателями удельной мощности и момента в сравнении с униполярными.
Униполярный шаговый двигатель
В конструкции униполярной установки используется одна обмотка на фазу, из каждой фазы исходит отвод. Таким образом управление магнитным полем значительно упрощено, в прочем, как и сам драйвер. Предусмотрено объединение средних выводов во внутренней части силовой системы. Общее количество обмоток может достигать восьми. Используя различные типы соединения обмоток униполярный двигатель может работать в режиме биполярного. Какой бы режим работы фиговой системы не был выбран, важно соблюдать предельную мощность.
Конструкция униполярной системы подразумевает использование 50% всей обмотки в любой момент работы. Оставшаяся часть обмотки в сердечнике не используется, таким образом толщина провода должна быть сужена, как минимум, на 50%. Достичь повышенных значений магнитного поля можно путем наращивания значения тока и физического увеличения количества витков в обмотке. Однако любое подобное «раскачивание» установки должно учитывать возникающие потери на обмотке, которые в униполярных моделях из-за тонкости обмотки являются распространенным явлением.
Преимущества
В первую очередь, популярность всех шаговых силовых машин следует обуславливать точностью исполнения поставленной задачи. При повороте на заданный угол соблюдается абсолютная точность работы. Динамичный и недорогой шаговый двигатель — это идеальное решение для организации автоматизации процессов выделенных систем и ее субчастей, для которых не принципиальна динамичность исполнения.
Недостатки
Зачастую, во время исполнения рабочего цикла существует вероятность возникновения широко известной проблемы, когда проскальзывает ротор. Как правило, это явление обусловлено некорректно выполненными настройками программного обеспечения, а также достижения пограничной с резонансной скорости вращения.
Электродвигатели шаговые
Рабочие органы ряда механизмов при выполнении ими производственных операций должны перемещаться дискретно, шагами. К таким механизмам относятся киносъемочная и проекционная аппаратура, приборы времени, механизмы подач различных станков, устройства перемещения валков прокатных станов и многие другие. Для привода этих рабочих органов целесообразно, очевидно, применять двигатель, способный по своему принципу действия обеспечить подобное дискретное движение. Таким двигателем является шаговый двигатель, ротор которого совершает шаговые перемещения определенной величины с фиксацией положения ротора в конце каждого шага.
Широкое распространение шагового электропривода определяется еще и тем обстоятельством, что он хорошо сочетается с цифровыми вычислительными машинами, программными устройствами и различными цифровыми управляющими приборами, которые все шире применяются во многих отраслях техники.
Современный шаговый двигатель по принципу действия является синхронным двигателем, магнитное поле которого перемещается (вращается) в воздушном зазоре не непрерывно, а дискретно, шагами. Это достигается тем, что обмотки статора питаются от специального источника импульсов напряжения, которые подаются на обмотке статора в определенной последовательности.
Принцип получения дискретного перемещения ротора рассмотрим на примере простейшей схемы двухфазного шагового двигателя, изображенной на рис. 1. Отметим, что под числом фаз шагового двигателя понимается количество каналов, по которым двигатель получает напряжение от источника питания. В схеме рис. 1 таких каналов два.
Двигатель имеет на статоре две пары явно выраженных полюсов, на которых находится обмотка возбуждения (управления) — первая I с выводами 1Н — 1К, и вторая II с выводами 2Н — 2К. Каждая из обмоток состоит из двух частей, находящихся на противоположных полюсах двигателя. Эти части (полуобмотки) соединены между собой таким образом, что при подаче напряжения на обмотку образуется магнитное поле с полюсами N—S, а при изменении полярности напряжения изменяется на противоположную и полярность магнитных полюсов.
Питание обмоток двигателя осуществляется, как правило, импульсами напряжения прямоугольной формы, поступающими с выхода специального коммутатора напряжения. Коммутатор обычно получает питание в виде напряжения постоянного тока Uu, преобразует его в импульсы напряжения, частота и последовательность которых задается импульсным сигналом управления, и подает их на обмотки двигателя. Коммутатор и шаговый двигатель образуют основную часть шагового привода. Ротор двигателя в рассматриваемой схеме представляет собой двухполюсный постоянный магнит.
Рис. 1. Принцип работы шагового двигателя.
Предположим, что в начальный момент работы шагового двигателя (рис. 1, а) подано напряжение на обмотку I. Протекание тока по этой обмотке вызовет появление магнитного, поля статора с вертикально расположенными полюсами N — S. В результате взаимодействия этого поля с постоянным магнитом ротора последний займет указанное на рисунке положение, в котором оси магнитных полей статора и ротора совпадают и ротор находится в положении устойчивого равновесия. Отметим при этом, что отклонение оси магнитного поля статора или ротора от этого положения вызовет в соответствии с формулой (2) появление синхронизирующего момента, стремящегося вернуть ротор в равновесное положение.
Допустим теперь, что с помощью коммутатора напряжение снято с обмотки I управления и подано на обмотку II с указанной полярностью. Протекание тока по обмотке II приведет к образованию магнитного поля статора уже с горизонтальными полюсами N — S (рис. 1, б). Другими словами, отключение обмотки I и подключение обмотки II вызовут дискретное скачкообразное перемещение оси магнитного поля статора на четверть окружности.
При повороте магнитного поля статора между осями полей статора и ротора появится угол рассогласования и на ротор в соответствии с формулой (2) начнет действовать синхронизирующий момент, стремящийся переместить ротор в новое положение равновесия. Это новое положение ротора будет соответствовать его повороту на четверть окружности (изображено сплошной линией на рис. 1, б). Таким образом, после переключения обмоток ротор совершил шаговое перемещение на четверть окружности вслед за поворотом магнитного поля статора, причем новое положение ротора также является фиксированным и устойчивым.
Предположим далее, что отключилась обмотка II и вновь подано напряжение на обмотку I, однако уже противоположной полярности. Магнитное поле статора при этом (рис. 1, в) вновь дискретно повернется на четверть окружности, но будет иметь уже противоположную приведенной на рис. 1, а полярность полюсов. Вновь на ротор будет действовать синхронизирующий момент, который повернет его в положение, изображенное на рис. 1, в. Следующий шаг в том же направлении ротор может совершить, если будет отключена обмотка I и подключена обмотка II с обратной полярностью напряжения. И, наконец, ротор завершит полный оборот при снятии напряжения с обмотки II и подаче напряжения на обмотку I с полярностью, указанной на рис. 1, а.
Рассмотренный способ коммутации обмоток двигателя, который обеспечивает шаговое перемещение на угол 90°, не является для схемы на рис. 1, а единственно возможным. Существует другой способ, который позволяет при той же конструкции двигателя уменьшить шаг ротора вдвое. Рассмотрим этот способ коммутации.
Допустим, что исходное положение двигателя соответствует схеме рис. 1, а. Подключим теперь обмотку II с полярностью, соответствующей магнитному полю на рис. 1, б, не отключая в то же время обмотку I. При этом образуется вторая — горизонтальная система полюсов, магнитное поле двигателя будет представлять собой результат сложения магнитных полей двух пар полюсов и ось результирующего поля будет располагаться посередине полюсов с одинаковой полярностью, как это и показано на рис. 1, г. Поэтому ротор после подключения обмотки II повернется только на угол 45° (рис. 1, г), а не на угол 90°.
Для совершения следующего шага в 45е достаточно лишь снять напряжение с обмотки L В этом случае магнитное поле двигателя будет соответствовать изображенному на рис. 1, б и ось магнитного потока статора расположится уже горизонтально. Следующий шаг совершится при подключении обмотки I на противоположную полярность напряжения без отключения обмотки II и т. д. Такая схема коммутации, при которой подключаются поочередно одна или две обмотки, является примером так называемой несимметричной схемы коммутации в отличие от рассмотренной вначале симметричной схемы.
В общем случае угловой шаг рассмотренного двигателя а определяется следующей формулой:
где р— число пар полюсов двигателя; п — количество подключений (тактов) в цикле, равное числу фаз при симметричной коммутации и удвоенному числу фаз при несимметричной коммутации.
Для рассмотренного примера р = 2, п = 2 для первой схемы коммутации и п — 4 для второй схемы, соответственно
Шаговый двигатель легко позволяет реверсировать (изменять на противоположное) направление своего движения при любом положении ротора. Для реверса двигателя, например, при симметричной схеме коммутации достаточно включить на обратную полярность напряжения обмотку, которая была отключена на данном такте коммутации. Ротор двигателя при этом совершит шаг в противоположном направлении.
Выше уже говорилось о том, что. управляющим сигналом для шагового привода является, как правило, маломощный импульсный сигнал, поступающий на вход шагового привода от цифрового управляющего прибора или программного устройства. При нормальной работе шагового двигателя каждому импульсу управления строго соответствует шаг двигателя, причем это соотношение выполняется как в установившемся, так и в переходных режимах работы двигателя.
Установившийся режим работы двигателя соответствует постоянной частоте управляющих импульсов, при этом средняя частота вращения ротора пропорциональна этой частоте. Движение ротора в установившемся режиме может иметь монотонный или колебательный характер в зависимости от сочетания параметров двигателя, нагрузки и. частоты управляющего сигнала.
К переходным режимам двигателя относятся его пуск, реверс, торможение и переход с одной частоты управляющих импульсов на другую. Пуск двигателя осуществляется скачкообразным (или постепенным) увеличением частоты входного сигнала от нуля до рабочей, торможение — снижением частоты до нуля, а реверс — изменением последовательности коммутации обмоток двигателя.
Переходные режимы являются для шагового двигателя наиболее сложными, так как вследствие электромагнитной инерции обмоток двигателя, механической инерции его ротора и наличия момента нагрузки на валу ротор двигателя может не успеть отработать полностью все импульсы, поступившие на вход шагового привода. Та максимальная частота управляющих импульсов, при которой возможен пуск двигателя из неподвижного состояния без выпадения из синхронизма (пропуск шагов), называется частотой приемистости. Чем выше электромагнитная и механическая инерция двигателя, чем больше момент его нагрузки, тем частота приемистости меньше. С другой стороны, увеличение максимального значения синхронизирующего момента двигателя и уменьшение углового шага позволяют повысить верхний предел частоты приемистости.
Современные шаговые двигатели имеют многообразные конструктивные исполнения. Основная их классификация производится чаще всего в зависимости от числа фаз двигателя и устройства магнитной системы. Шаговые двигатели бывают однофазными, двухфазными и многофазными и могут иметь активный или пассивный ротор. Рассмотрим основные типы шаговых двигателей и их количественные характеристики и параметры.
Шаговые двигатели с активным ротором имеют ротор, выполненный из постоянных магнитов или снабженный обмоткой возбуждения, как у обычных синхронных двигателей. Широкое распространение получили вследствие своей высокой экономичности и надежности в работе, технологичности изготовления, небольших габаритов и веса двигатели с ротором из постоянных магнитов. Этот тип двигателя и приведен в качестве примера на рис. 1. Обычно шаговые двигатели с активным ротором имеют относительно крупный шаг ротора — от 90 до 15°, что связано главным образом с трудностями изготовления активного ротора с малыми полюсными делениями. Уменьшение шага в таких двигателях может достигаться увеличением числа фаз и тактов коммутации, а также применением двухстаторной или двухроторной конструкции двигателя.
Максимальные частоты вращения шаговых двигателей этого типа составляют 2000—3000 об/мин, а их частота приемистости лежит в пределах от 70 до 500 Гц.
Отечественной промышленностью выпускается несколько серий таких шаговых двигателей: четырехфазные типа ШДА, двух- и четырехфазные типа ДШ и ДША соответственно, трехфазные типа ШДА-3 и ряд других. Некоторые технические данные этих двигателей приведены в табл. 10, где fn — частота приемистости двигателя при номинальной нагрузке, a Un — напряжение постоянного тока источника питания.
Таблица 2
|
|
|
|
|
|
|
|
ДИР-1Б | 3,6 | 4 | 400 |
| 80 | 27 | 0,16 |
ДШ-0.025А | 22,5 | 4 | 25 | 2,5 | 450 | 27 | |
ДШ-0.04А | 22,5 | 4 | 40 | 3,5 | 450 | 27 | |
ДШ-0,1А | 22,5 | 4 | 100 | 19 | 300 | 27 | 0,5 0,9 1,6 |
ДШ-0.25А | 22,5 | 4 | 250 | 58 | 250 | 27 | |
ДШ-0.4А | 22,5 | 4 | 400 | 125 | 200 | 27 | |
ДШ-1А | 22,5 | 4 | 1000 | 420 | 150 | 27 | 3,0 |
ЦШ-4А | 18 | 4 | 4000 | 1370 | 100 | 27 | 8,1 |
ДШ-6А | 18 | 4 | 6000 | 2300 | 80 | 27 | 11,5 |
ДШ-10А | 18 | 4 | 10000 | 4200 | 70 | 27 | 14,8 |
ШДА-1А | 22,5 | 4 | 40 | 3 | 50 | 14 28 | 0,12 |
ШДА-1Ф-К | 22,5 | 4 | 30 | 3 | 50 | 0,14 | |
ЩДА-2А | 22,5 | 4 | 110 | 6,8 | 50 | 14 | 0,21 |
ШДА-2Ф -К | 22,5 | 4 | 60 | 6,8 | 125 | 0,23 | |
ШДА-ЗА | 22,5 | 4 | 280 | 20 | 32 | 14 | 0,35 |
ШДА-ЗФ | 22,5 | 4 | 120 | 20 | 100 | 0,35 | |
ШДА-4А | 22,5 | 4 | 600 | 28 | 50 | 14 | 0,55 |
ЩДА-5А | 22,5 | 4 | 1000 | 48 | 50 | 14 | 0,8 |
ШДА-6А | 22,5 | 4 | 1600 | 97 | 50 | 14 | 1.1 |
ШДМ-2Ф | 22,5 | 4 | 100 | 1,7 | 220 | 27 | 0,32 1,65 |
ШДМ-7Ф | 22,5 | 4 | 1600 | 80 | 60 | 27 | |
ШД- 10I 10О | 15 | 4 | 10 | 5 | 100 | 14 | 0,08 |
ШД-1С | 15 | 4 | 40 | 14 | 100 | 27 | 0,14 |
ШД-1Б | 15 |
| 40 | 14 | 200 | 25 | 0.12Е |
ШД-1ЕМ | 15 | 4 | 40 | 3 | 250 | 14 | 0.20 |
ШД-1А | 15 |
| 120 | 45 | 150 | 25 | 0,46 |
ШД-ЗС | 15 | 4 | 250 | 100 | 100 | 24 | 0,6 |
ЦЩА-2-1 | 15 | 2 | 10 |
| 400 | 27 | 0,14 |
ШДА-2-2 | 15 | 2 | 40 |
| 350 | 27 | 0,28 |
ШДА-2-3 | 15 | 2 | 100 |
| 320 | 27 | 0,55 |
ЩДА-2-4 | 15 | 2 | 400 |
| 300 | 27 | 1,0 |
ШДА-2-5 | 15 | 2 | 600 |
| 250 | 27 | 2,0 |
ШДА-2-6 | 18 | 2 | 1000 |
| 200 | 27 | 3,15 |
ШДА-3-1 | 15 | 3 | 10 |
| 500 | 27 | 0,14 |
ШДА-3-2 | 15 | 3 | 40 |
| 450 | 27 | 0,28 |
ШДА-3-3 | 15 | 3 | 100 | — | 350 | 27 | 0,55 |
ШДА-3-4 | 15 | 3 | 400 |
| 150 | 27 | 1,0 |
ШДА-З-Б | 15 | 3 | 600 |
| 150 | 27 | 2,0 |
ШДА-3-6 | 15 | 3 | 1000 | — | 100 | 27 | 3,5 |
Ш-22,5/0,1 | 22,5 | 4 | 100 | 0,4 | 500 | 48 | 0.49 |
Ш-22,5/0,25 | 22,5 | 4 | 250 | 1,7 | 500 | 48 | 0,67 |
Ш-22,5/0,6 | 22,5 | 4 | 600 | 15 | 350 | 48 | 1,7 |
Ш-22,5/1,6 | 22,5 | 4 | 1600 | 68 | 250 | 48 | 3.0 |
Ш-22,5/4 | 22,5 | 4 | 4000 | 210 | 240 | 48 | 4,2 |
Ш-22.5/10 | 22,5 | 4 | 10000 | 710 | 120 | 48 | 10,0 |
Ротор шагового двигателя с постоянными магнитами изготовляется обычно из сплавов ЮН15ДК25БА или ЮНДК35Т5 в виде «звездочек», как это показано на рис. 2. При этом ротор может быть или монолитным (рис. 2, а), или составным (рис. 2, б). Во втором случае магниты устанавливаются на специальную втулку или непосредственно на вал, которые выполняются из магнитомягкого материала.
Для этих двигателей практическое применение нашла также двухпакетная конструкция. Она предусматривает размещение в одном корпусе двигателя двух сердечников статора и двух «звездочек» ротора. Оси полюсов обоих роторов совпадают, а полюсы сердечников статора сдвинуты относительно друг друга на половину одного зубцового деления, чем достигается пространственный сдвиг магнитных полей статорных обмоток. Такая конструкция, позволяющая уменьшить шаг ротора и увеличить быстродействие двигателя, является целесообразной при создании мощных (силовых) шаговых двигателей.
Желание уменьшить электромагнитную и механическую инерцию шаговых двигателей, что позволяет улучшить их динамические характеристики, привело к созданию двигателей с малоинерционными роторами — полыми цилиндрическими и дисковыми, имеющими на роторе печатную обмотку. По конструкции эти двигатели аналогичны двигателям непрерывного вращения и обладают такими же отличительными свойствами. Одна из конструктивных схем шагового двигателя этого типа приведена на рис. 3. Печатная обмотка управления находится на полом цилиндрическом роторе 1 (такая конструкция двигателя часто называется обращенной). Токоподвод к роторной обмотке осуществляется через контактные кольца 2, укрепленные на валу двигателя. Полый ротор находится в зазоре между внешним статором 3, на котором располагается обмотка возбуждения 4, и внутренним статором 5, который является частью магнитопровода.
Рис. 2. Ротор шагового двигателя.
а — монолитный; б — составной.
Рис. 3. Малоинерционный шаговый двигатель.
Практическое распространение получила также конструкция шагового двигателя с дисковым (торцевым) ротором с печатными обмотками.
Шаговые двигатели с пассивным ротором. Специфической особенностью шаговых двигателей с активным ротором является, как уже отмечалось выше, относительно большой шаг ротора. Это требует в большинстве случаев применения механических передач (редукторов), понижающих (редуцирующих) шаг и соответственно скорость входного вала производственного механизма, что усложняет шаговый привод, снижает его надежность, повышает массу, габариты и уровень шума. Стремление найти конструкцию шагового двигателя с небольшим шагом ротора привело к появлению двигателей с пассивным ротором. Эти двигатели делятся на реактивные и индукторные.
Рис. 4. Принцип работы реактивного шагового двигателя.
Рассмотрим вначале работу реактивного шагового двигателя, одна из возможных конструктивных схем которого показана на рис. 4,а.
Статор и ротор двигателя, набранные из листов электротехнической стали, имеют явно выраженные полюсы, которые в теории шагового привода принято обычно называть зубцами. На зубцах статора располагаются обмотки, которые, как обычно, получают питание от коммутатора напряжения. Ротор двигателя, выполненный из ферромагнитного материала, не имеет обмотки возбуждения, в силу чего он и получил название пассивного.
Отличительной особенностью конструкции реактивного двигателя является неравенство количества зубцов статора Zc и ротора Zp, причем обычно ротор имеет больше зубцов, чем статор. Так, изображенный на рис. 4,а Двигатель имеет 6 зубцов на статоре и 8 зубцов на роторе. При этом важно отметить, что зубцы ротора соосны с зубцами одной пары диаметрально противоположных зубцов статора.
Предположим теперь, что в исходном положении, соответствующем приведенному на рис. 4,а, подано напряжение на обмотку управления пары полюсов 1—1 статора и образовалось магнитное поле с полюсами N—S. Тогда при изображенном на рис. 4,а положении ротора, при котором ось намагниченных зубцов статора /—/ совпадает с осью зубцов ротора 1—1, последний находится в положении устойчивого равновесия, поскольку магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются.
Снимем теперь напряжение с первой обмотки и подадим на вторую. Это переключение вызовет намагничивание зубцов статора II—II и поворот оси магнитного 360° поля на угол g— =60°, как это показано на рис. 4,6.
Ось магнитного поля уже не совпадает ни с одной осью зубцов ротора, силовые линии магнитного поля деформируются, и на ротор начинает действовать синхронизирующий момент, стремящийся повернуть его в согласованное равновесное положение по кратчайшему пути. Это новое равновесное положение будет соответствовать изображенному на рис. 4,6, когда ось зубцов ротора 2—2 будет совпадать с осью зубцов статора //—II.
При следующем переключении обмоток — отключении второй и подключении третьей обмотки — намагнитятся зубцы статора III—III и ротор вновь повернется уже до совпадения оси зубцов ротора 3—3 с осью зубцов статора III—III.
Из рис. 4,а нетрудно определить, что при каждом переключении обмоток статора ротор совершает поворот (шаг) на угол ар, равный:
Р В общем виде эта формула имеет вид:
где Тс, тр — соответственно полюсные деления статора и ротора.
Уменьшая разность чисел зубцов Zc и Zp, можно снижать шаг ротора до весьма малых значений. Практически разность Zp—Zc выбирают обязательно четной, что улучшает использование двигателя.
Одновременно с уменьшением углового шага ротора снижается и частота его вращения. Действительно, если
360°
поле статора поворачивается на угол , а ротор
360* (Zp — Zc)
за то же время на угол а — —7 , то частота вращения ротора п. будет меньше частоты вращения статора, для рассмотренного примера это отношение будет равно
Более распространенная конструкция реактивного шагового двигателя показана на рис. 4,в. Каждый полюс статора имеет три зубца, такие же зубцы расположены по всей поверхности ротора. Зубцы ротора соосны, как и в конструкции рис. 4,а, с зубцами статора одной диаметрально противоположной пары и смещены относительно зубцов двух других пар на треть зубцового деления. В этом случае при переключении обмоток статора ротор будет поворачиваться на 1/3 зубцового деления до совпадения зубцов ротора с зубцами вновь возбужденной пары полюсов статора.
При изготовлении ротора с большим числом зубцов Zр можно получить небольшое зубцовое деление ротора и соответственно малый шаг ротора, составляющий в реальных конструкциях доли градуса. В общем случае смещение осей зубцов ротора и статора производится на угол S6G°/mZp, а единичный шаг ротора составляет:
где п — количество тактов в цикле; т — число фаз.
Реактивные шаговые двигатели при всей своей простоте и технологичности конструкции, малых значениях шага и частоты вращения ротора обладают одним существенным недостатком: синхронизирующий момент
этих двигателей, а тем самым и их мощность невелики, что ограничивает области их применения
Этого недостатка в значительной мере лишены индукторные шаговые двигатели, в которых для увеличения синхронизирующего момента используется дополнительное подмагничивание ротора постоянным магнитным потоком со стороны статора. Одна из конструктивных схем двигателя этого типа изображена на рис. 5.
Особенность двигателя заключается в наличии кольцевого постоянного магнита I, расположенного на одном из торцов двигателя. Этот магнит создает постоянный по направлению магнитный поток, который, проходя в осевом направлении по ротору и в радиальном направлении через воздушный зазор, имеет вследствие зубчатой поверхности ротора 2 более высокое значение индукции в зубцах ротора, нежели во впадинах. Другими словами, силовые линии постоянного магнита N—S концентрируются в зубцах ротора и поэтому эти зубцы можно рассматривать как своего рода полюсы постоянного магнита. Индукторные двигатели имеют по сравнению с реактивными повышенный синхронизирующий момент и улучшенные энергетические и динамические свойства, занимая по этим показателям среднее положение между двигателями с активным и реактивным роторами.
Помимо возбуждения от постоянных магнитов, индукторные шаговые двигатели могут иметь независимое электромагнитное возбуждение или выполняться с самовозбуждением.
Отечественная электропромышленность выпускает несколько серий шаговых двигателей с пассивным ротором. Технические данные некоторых из них приведены в табл. 3.
Как видно из приведенных таблиц, шаговые двигатели с пассивным ротором имеют по сравнению с двигателями с активным ротором более мелкий единичный шаг и большую частоту приемистости.
Рис. 5. Индукторный шаговый двигатель.
Развитие шагового электропривода и его широкое распространение привели к созданию специальных видов шаговых двигателей — линейных, волновых и с катящимся ротором.
Таблица 3
Эти двигатели имеют те же специфические особенности, что и рассмотренные ниже двигатели непрерывного вращательного движения, отличаясь от них дискретностью перемещения ротора.
Двигатель с катящимся (эксцентрическим) ротором имеет тот же принцип действия, что и синхронный двигатель с катящимся ротором, но отличается от него фиксированным значением эксцентриситета ротора. К достоинствам шаговых двигателей с эксцентрическим ротором относится возможность получения весьма малых значений шага и низких частот вращения при значительном моменте и малой инерционности. При этом двигатели характеризуются небольшой массой и относительно высокими энергетическими показателями работы.
Примерно такими же показателями обладают шаговые двигатели с гибкими волновыми передачами. Такие передачи имеют незначительный люфт и высокий коэффициент полезного действия, что позволяет применить их в весьма точных устройствах.
Для получения линейных дискретных перемещений рабочих органов применяются линейные шаговые двигатели.
Шаговый двигатель с редуктором принцип работы
Шаговые двигатели
Товары
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора.
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования NEMA по посадочным размерам и размеру фланца. Самые ходовые типоразмеры это NEMA 17 с фланцем 42*42мм, NEMA 23 с фланцем 57*57мм и NEMA 34 размером 86*86мм соответственно. Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Как устроен шаговый двигатель
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Статор имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах. Двигатель на рисунке имеет величину шага 30 град, так же, как и предыдущий. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
На практике двигатель с постоянными магнитами выглядит, например, вот так. Увидеть такой двигатель можно в лазерном принтере.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Это значит, что при свободном выбеге на больших оборотах двигатель сработает как генератор и может сжечь драйвер током, который сам и сгенерирует. Это же относится и к гибридным двигателям.
Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Выглядит гибридный двигатель, например, вот так.
Большинство современных шаговых двигателей являются именно гибридными, поэтому давайте подробней рассмотрим устройство шаговых двигателей этого типа.
Ротор двигателя разделен поперек на две части, между которыми расположен цилиндрический постоянным магнит. Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Посмотрим на продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев, что очень хорошо было видно на предыдущем фото. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому она не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая, около 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его служба может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Мы рассмотрели устройство самого «железа» шаговых двигателей, но помимо этого двигатели можно еще поделить по количеству и способу коммутации их обмоток.
Тут всего два основных вида – биполярный и униполярный
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой или полумостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Примером распространенного биполярного двигателя может быть шаговый двигатель марки 17HS4401
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
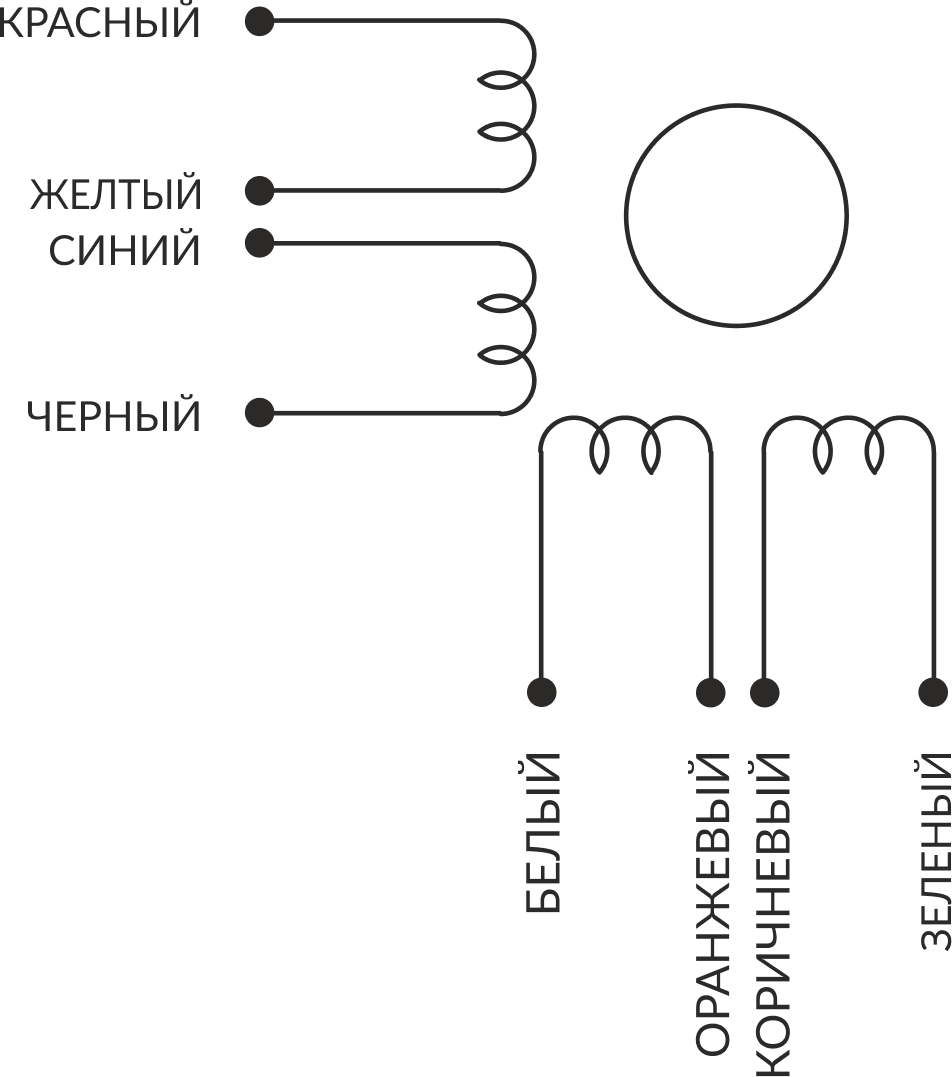
Примером распространенного униполярного двигателя с пятью выводами может быть шаговый двигатель марки 28BYJ-48. Данный двигатель можно переделать в биполярный, разделив выводы AB и CD, для чего достаточно перерезать одну из перемычек на плате под синей крышкой.
Иногда двигатели имеют 4 раздельные обмотки, по этой причине их ошибочно называют 4-х фазными или четырехобмоточными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать и как униполярный, и как биполярный.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность, а значит при одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путей для повышения магнитного поля два – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника, однако на практике гораздо более существенным является ограничение по нагреву двигателя в следствии потерь из-за омического сопротивления обмоток. Тут и проявляется преимущество конструкции биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток, а другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра или увеличивать габариты двигателя. В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
На практике можно встретить оба типа двигателей, так как биполярные дешевле из-за меньшей материалоемкости, а униполярные требуют значительно более простых драйверов. В настоящее время наиболее широко распространены гибридные биполярные двигатели.
Где приобрести ШД? Вы можете купить шаговые двигатели в нашем магазине 3DIY с доставкой по всей России!
Управление шаговым двигателем
Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе. Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Где приобрести драйвера ШД? Купить драйвера шаговых двигателей можно у нас в онлайн магазине с доставкой!
Конструктивные исполнения ШД
Обычный шаговый двигатель
Двигатель с полым валом
Шаговые двигатели с полым валом применяются когда существует необходимость передачи крутящего момента без применения соединительных муфт, например для использования в ограниченном пространстве. Так же сквозь него можно продеть длинный вал, который будет торчать с двух сторон и синхронно крутить что-то с одной и с другой стороны.
Двигатель со встроенной в вал приводной гайкой
Такой вид двигателя может найти применение в том случае, если требуется быстрое перемещение на большое расстояние. Длинный винт на высоких оборотах ведет себя подобно скакалке, а при использовании такого мотора винт можно неподвижно натянуть между опорами, а сам мотор закрепить на подвижной части оборудования. Тогда длина и нежесткость винта не будет влиять на максимальную скорость.
Двигатель с двойным валом
В этом исполнении двигатель имеет удлиненный вал, длинный конец которого выступает со стороны задней крышки. На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
Находят себе применение например в 3д принтерах или в любом другом месте, где хочется сэкономить место не только на муфте между валом и винтом, но и на подшипниковой опоре винта, роль которой в данном случае выполняют подшипники двигателя.
Двигатель со встроенным тормозом
Позволяет зафиксировать вал в нужной позиции дополнительно к удержанию самим шаговиком. Так же позволяет удерживать вал в случае отключения питания двигателя.
Двигатель с редуктором
Редуктор позволяет понизить обороты двигателя и поднять его крутящий момент. Данное исполнение редко встречается в связи с тем, что шаговые двигатели и так имеют значительный момент на низких оборотах и сами по себе могут достигать весьма низких скоростей вращения.
Двигатель с энкодером
Он же сервошаговый двигатель. Фактически это сервопривод на шаговом двигателе. На удлиненный вал со стороны задней крышки монтируется энкодер в корпусе и благодаря этому мы получаем обратную связь о положении вала двигателя. В случае пропуска шагов двигателем контроллер узнает об этом и ориентируясь на показания энкодера будет подавать дополнительные импульсы до тех пор, пока вал не займет нужное положение. Сервошаговый двигатель используется со своим специальным драйвером, который имеет вход для подключения энкодера.
Преимущества шагового двигателя
- угол поворота ротора определяется числом поданных импульсов. Шаговый двигатель крутится не плавно, а шагами, шаг имеет определенную величину. Поэтому чтобы повернуть вал в нужное положение мы просто подаем известное нам количество импульсов.
- зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи. Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
- двигатель обеспечивает полный момент в режиме остановки. Это хорошо тем, что для фиксации положения вала запитанному двигателю не нужен тормоз, можно тормозить его при помощи драйвера.
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу, так как на один оборот двигателя приходится неизменное количество шагов, совершив которые мы всегда получим поворот на 360 градусов.
- высокая надежность. Высокая надежность двигателя связанна с отсутствием щеток. Срок службы фактически определяется сроком службы подшипников
- возможность получения низких скоростей вращения. Для получения низкой скорости вращения двигателя достаточно замедлить скорость подачи импульсов, тогда двигатель будет медленнее шагать и скорость его вращения будет небольшой.
- большой крутящий момент на низких скоростях. Большой крутящий момент на низких оборотах позволяет отказаться от применения редуктора, что упрощает конструкцию оборудования
- может быть перекрыт довольно большой диапазон скоростей. Скорость вращения двигателя пропорциональна частоте входных импульсов, подавая их быстрее или медленнее мы так же влияем и на скорость вращения.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.
- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
Как выбрать шаговый двигатель? На какие параметры обратить внимание.
По большому счету, выбор двигателя сводится к выбору нескольких вещей:
- вида двигателя (его размеры)
- тока фазы
- индуктивность
Что касается вида двигателя, то при отсутствии каких-то определенных предпочтений мы бы рекомендовали использовать биполярные шаговые двигатели с 4 выводами, так как они наиболее распространены и, что не менее важно, не менее распространены драйвера для них. То есть случае какой-либо поломки вы легко найдете замену и отремонтируете станок.
Размер двигателя и его ток проще всего подобрать, ориентируясь на готовые станки от известных производителей, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом и можно взять их характеристики за основу. Производитель двигателя в данном случае не особо важен, так как ввиду отработанной технологии производства их характеристики у разных производителей примерно одинаковые.
Остается одна характеристика – индуктивность.
При одинаковом напряжении питания двигатели с большей индуктивностью имеют больший момент на низких оборотах, и меньший – на высоких, как видно из графика. Но большая индуктивность потенциально дает вам возможность получить больший крутящий момент, повысив напряжение питания, тогда как при использовании двигателей с небольшой индуктивностью повышение напряжения может привести к тому, что двигатель будет перегреваться без заметной прибавки в характеристиках. Это связано с тем, что нарастание тока в обмотках с низкой индуктивностью идет быстрее и мы легко можем получить среднее значение тока выше номинального, а как следствие этого – перегрев. Таким образом при прочих равных лучше выбрать двигатель с большим значением индуктивности.
Источник
общие сведения, принцип работы мотора
Практически все электрические приборы функционируют с помощью приводных механизмов. Они могут иметь различное строение и принцип работы, а также особенности настраивания. Существуют разные типы таких приспособлений. Одним из наиболее востребованных и доступных по цене считается биполярный шаговый двигатель, благодаря которому можно обеспечить реализацию систем точного позиционирования.
Общие сведения
Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный. Устройство представляет собой синхронный бесщеточный электродвигатель, имеющий одну или несколько обмоток. Ток, который подается на обмотки статора, вызывает фиксацию ротора, благодаря чему осуществляются его дискретные угловые перемещения или шаги.
Первые модели таких приспособлений появились еще в 30-е годы XIX века и представляли собой своеобразный магнит, приводящий в движение храповое колесо. Во время включения оно перемещалось на величину зубцового шага. Раньше механизм использовался на кораблях военного флота Великобритании с целью перемещения торпед в нужную сторону.
Через несколько лет и армия США переняла это приспособление и стала активно применять его в своих военных кораблях и других механизмах. В 1919 году шотландец Уолкер получил патент на двигатель с ротором.
В настоящее время подобные механизмы востребованы и часто применяются. Шаговый мотор используется для обеспечения бесперебойного функционирования шлифовального и фрезерного станков, различных бытовых приборов, производственных механизмов и транспорта, а также жестких дисков персональных компьютеров. Именно поэтому он так востребован. Устройство состоит из нескольких частей:
- контролер, предназначенный для регулирования работы шагового привода;
- специальные магнитные части;
- обмотки;
- панель, выполняющая роль блока управления;
- сигнализаторы и передатчики, благодаря которым работа устройства отлаженная и бесперебойная.
Биполярные двигатели имеют только одну обмотку в одной фазе, тогда как униполярные содержат две. Первые считаются более сложными в управлении, но обеспечивают плавную работу устройства.
Принцип работы
Шаговый двигатель работает по простым принципам. Первый этап — приложение напряжения к клеммам. Благодаря этому щетки на самом устройстве начинают постоянно двигаться. Двигатель холостого хода имеет свойство преобразовывать входящие импульсы.
Эти импульсы имеют прямоугольную направленность и преображение идет в заранее определенное положение ведущего вала, который к нему приложен. Вследствие этого вал перемещается под определенным углом. Оснащенные подобным редуктором приспособления довольно эффективны и надежны при условии наличия нескольких электромагнитов. Находиться они должны вокруг центральной детали из железа, имеющей зубчатую форму.
Внешняя цепь, отвечающая за управление, подает сигнал к магниту. При возникновении необходимости повернуть вал в ту или иную сторону тот электромагнит, на который был послан импульс, начинает быстро притягивать к себе зубья колеса. Они постепенно выравниваются с этим элементом, но смещаются по отношению к другим магнитным частям приспособления.
После выключения первого электромагнита включается второй и начинается беспрерывное движение шестеренки. Благодаря этому деталь выравнивается с предыдущим колесом. Такой цикл повторяется необходимое количество раз. Каждый из них и называется постоянным шагом. Именно поэтому двигатель получил такое название. Вычислить скорость его работы можно с помощью подсчета шагов, которые необходимы для обеспечения полного цикла.
Контролировать работу приспособления можно с помощью специального драйвера. Обычно это необходимо в случае настраивания станка или ветрогенератора.
Основные режимы
Изделие функционирует в нескольких режимах, которые предварительно настраиваются в зависимости от потребностей человека. Наиболее распространенными считаются следующие:
- Волновой режим предполагает протекание электрического тока только через одну обмотку. Сегодня он используется редко, для того чтобы снизить нагрузку на двигатель и количество потребляемой электроэнергии.
- Полношаговый — используется гораздо чаще и считается стандартным режимом для этого типа двигателя. Напряжение на обмотке при такой работе одинаково и приспособлению требует максимальное напряжение для корректного функционирования.
- Полушаговый режим — один из оригинальных способов изменить работу приспособления и при этом не затрагивать блок управления. Заключается в одновременном запитывании всех пар обмоток, что приводит к повороту ротора на половину своего обычного шага. Используя этот метод, можно получить двигатель с двойной мощностью при минимальных затратах электроэнергии. Он будет меньше изнашиваться и прослужит дольше, чем тот, что постоянно работает в полношаговом режиме.
- Микрошаговый режим сегодня считается наиболее часто применяемым при использовании шагового двигателя. Принцип действия заключается в подаче на обмотку не импульса, а сигнала, напоминающего синусоиду по форме. Такой режим делает работу двигателя более плавной, а переход от одного шага к другому незаметным. Благодаря этому уменьшаются рывки и скачки приспособления, оно может функционировать как обычный двигатель постоянного тока.
Последний режим имеет преимущество, поскольку представляет собой скорее метод подпитки двигателя, а не управления обмотками. Именно поэтому может использоваться при волновом или полношаговом способе работы приспособления. Если рассмотреть схему функционирования прибора в микрошаговом режиме, может показаться, что шаги становятся больше. На самом деле это не так, но процесс все равно становится плавным и отсутствуют рывки.
Разновидности приспособления
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5 градусов. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно. Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.
На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5 градуса.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
- Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
- Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
Существуют также трехфазные двигатели, имеющие узкую область использования: дисководы, различные фрезерные станки, принтеры и некоторые автомобили, где используется необычная заслонка.
Другие типы устройств
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1 градуса, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
Конструкция, работа, типы и применение
Шаговый двигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. Кроме того, это бесщеточный синхронный электродвигатель, который может разделить полный оборот на большое количество шагов. Положение двигателя можно точно контролировать без какого-либо механизма обратной связи, если двигатель точно подобран для конкретного применения. Шаговые двигатели аналогичны вентильным реактивным двигателям. Шаговый двигатель использует теорию работы магнитов, чтобы вал двигателя поворачивался на точное расстояние при подаче электрического импульса.У статора восемь полюсов, а у ротора — шесть. Ротору потребуется 24 импульса электричества, чтобы переместить 24 ступени на один полный оборот. Другими словами, ротор будет перемещаться точно на 15 ° за каждый электрический импульс, который получает двигатель.
Конструкция и принцип работы
Конструкция шагового двигателя довольно похожа на двигатель постоянного тока. Он включает в себя постоянный магнит, такой как ротор, который находится посередине, и он будет вращаться, когда на него будет действовать сила.Этот ротор заключен в № статора, намотанного через магнитную катушку. Статор расположен рядом с ротором, так что магнитные поля внутри статоров могут управлять движением ротора.
Шаговый двигатель
Шаговым двигателем можно управлять, подавая напряжение на каждый статор один за другим. Таким образом, статор намагничивается и работает как электромагнитный полюс, который использует энергию отталкивания на роторе, чтобы двигаться вперед. Альтернативное намагничивание статора, а также размагничивание будет постепенно сдвигать ротор и позволяет ему вращаться с большим контролем.
Принцип работы шагового двигателя — Электромагнетизм. Он включает в себя ротор с постоянным магнитом, а статор с электромагнитами. Как только питание подается на обмотку статора, внутри статора будет развиваться магнитное поле. Теперь ротор в двигателе начнет двигаться с вращающимся магнитным полем статора. Итак, это основной принцип работы этого двигателя.
Конструкция шагового двигателяВ этом двигателе используется мягкое железо, защищенное электромагнитными статорами.Полюса статора и ротора не зависят от типа шагового двигателя. Как только статоры этого двигателя находятся под напряжением, ротор будет вращаться, чтобы выровняться со статором, в противном случае поворачивается, чтобы иметь наименьший зазор через статор. Таким образом, статоры последовательно активируются для вращения шагового двигателя.
Техника вождения
Техника вождения с шаговым двигателем с могут быть возможны с некоторыми специальными схемами из-за их сложной конструкции. Существует несколько способов управления этим двигателем, некоторые из них обсуждаются ниже на примере четырехфазного шагового двигателя.
Режим одиночного возбуждения
Основным методом управления шаговым двигателем является режим одиночного возбуждения. Это старый метод, который в настоящее время мало используется, но об этом методе нужно знать. В этом методе каждая фаза, в противном случае статор рядом друг с другом, будет запускаться одна за другой поочередно с помощью специальной цепи. Это намагнитит и размагнитит статор, чтобы ротор двигался вперед.
Full Step Drive
В этом методе два статора активируются одновременно, а не один за очень короткий период времени.Этот метод приводит к высокому крутящему моменту и позволяет двигателю управлять высокой нагрузкой.
Полушаговый привод
Этот метод справедливо связан с полным шаговым приводом, потому что два статора будут расположены рядом друг с другом, так что он будет активирован первым, тогда как третий будет активирован после этого. Этот вид цикла для переключения сначала двух статоров, а затем третьего статора приводит в движение двигатель. Этот метод приведет к улучшенному разрешению шагового двигателя при уменьшении крутящего момента.
Micro Stepping
Этот метод используется чаще всего из-за его точности. Переменный ток шага будет подаваться схемой драйвера шагового двигателя к катушкам статора в форме синусоидального сигнала. Точность каждого шага может быть увеличена за счет этого небольшого шагового тока. Этот метод широко используется, поскольку он обеспечивает высокую точность, а также в значительной степени снижает рабочий шум.
Схема шагового двигателя и его работа
Шаговые двигатели работают иначе, чем щеточные двигатели постоянного тока, которые вращаются, когда на их клеммы подается напряжение.С другой стороны, шаговые двигатели имеют несколько зубчатых электромагнитов, расположенных вокруг куска железа в форме центральной шестерни. Электромагниты получают питание от внешней цепи управления, например, микроконтроллера.
Схема шагового двигателяЧтобы заставить вал двигателя вращаться, сначала на один электромагнит подается мощность, которая заставляет зубья шестерни магнитно притягиваться к зубцам электромагнита. В момент, когда зубья шестерни выровнены относительно первого электромагнита, они немного смещены относительно следующего электромагнита.Таким образом, когда следующий электромагнит включается, а первый выключается, шестерня слегка поворачивается, чтобы выровняться со следующей, и оттуда процесс повторяется. Каждое из этих небольших поворотов называется шагом, при котором целое число шагов совершает полный оборот.
Таким образом, мотор можно вращать с помощью точного. Шаговые двигатели не вращаются постоянно, они вращаются ступенчато. На статоре закреплены 4 катушки с углом между собой 90 o . Подключение шагового двигателя определяется способом соединения катушек.В шаговом двигателе катушки не соединены. Двигатель имеет шаг вращения 90, — , при этом на катушки подается питание в циклическом порядке, определяющем направление вращения вала.
Работа этого двигателя отображается с помощью переключателя. Катушки активируются последовательно с интервалом в 1 секунду. Вал вращается на 90 o каждый раз, когда активируется следующая катушка. Его крутящий момент на низкой скорости будет напрямую зависеть от тока.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей:
- Шаговый двигатель с постоянным магнитом
- Гибридный синхронный шаговый двигатель
- Шаговый двигатель с переменным сопротивлением
Шаговый двигатель с постоянным магнитом
В двигателях с постоянным магнитом используется постоянный магнит (PM) в роторе и действует на притяжение или отталкивание между PM ротора и электромагнитами статора.
Это наиболее распространенный тип шагового двигателя по сравнению с различными типами шаговых двигателей, доступных на рынке. Этот двигатель включает в себя постоянные магниты в конструкции двигателя. Этот тип двигателя также известен как двигатель для жестяных банок. Основное преимущество этого шагового двигателя — меньшая стоимость производства. На каждый оборот приходится 48-24 шага.
Шаговый двигатель с регулируемым сопротивлением
Двигатели с регулируемым сопротивлением (VR) имеют ротор из гладкого железа и работают по принципу, согласно которому минимальное сопротивление достигается при минимальном зазоре, следовательно, точки ротора притягиваются к полюсам магнита статора.
Шаговый двигатель с переменным сопротивлением является основным типом двигателя и используется в течение последних многих лет. Как следует из названия, угловое положение ротора в основном зависит от сопротивления магнитной цепи, которое может образовываться между зубьями статора и ротора.
Гибридный синхронный шаговый двигатель
Гибридные шаговые двигатели названы потому, что в них используется комбинация методов постоянного магнита (PM) и переменного магнитного сопротивления (VR) для достижения максимальной мощности в небольших корпусах.
Наиболее популярным типом двигателя является гибридный шаговый двигатель, поскольку он дает хорошие характеристики по сравнению с ротором с постоянными магнитами с точки зрения скорости, шагового разрешения и удерживающего момента. Но этот тип шагового двигателя дороже по сравнению с шаговыми двигателями с постоянными магнитами. Этот двигатель сочетает в себе характеристики шаговых двигателей с постоянным магнитом и переменного магнитного сопротивления. Эти двигатели используются там, где требуется меньший угол шага, например 1,5, 1,8 и 2,5 градуса.
Как выбрать шаговый двигатель?
Прежде чем выбрать шаговый двигатель для ваших требований, очень важно изучить кривую крутящего момента двигателя.Таким образом, эту информацию можно получить у разработчика двигателя, и это графический символ крутящего момента двигателя при заданной скорости. Кривая скорости вращения двигателя должна точно соответствовать потребностям приложения; в противном случае не может быть достигнута ожидаемая производительность системы.
Типы подключения
Шаговые двигатели, как правило, являются двухфазными двигателями, такими как униполярные или биполярные. Для каждой фазы в униполярном двигателе есть две обмотки. Здесь центральный вывод — это обычный вывод между двумя обмотками к полюсу.У униполярного двигателя от 5 до 8 выводов.
В конструкции, в которой два общих полюса разделены, но имеют центральную резьбу, этот шаговый двигатель имеет шесть выводов. Если двухполюсные центральные ответвители короткие внутри, то у этого двигателя пять выводов. Униполярный с 8 выводами облегчит как последовательное, так и параллельное соединение, в то время как двигатель с пятью или шестью выводами имеет последовательное соединение катушки статора. Работа униполярного двигателя может быть упрощена, поскольку во время его работы не требуется реверсировать поток тока в цепи управления, который известен как бифилярные двигатели.
В биполярном шаговом двигателе для каждого полюса имеется одна обмотка. Направление подачи должно измениться через схему управления, чтобы она стала сложной, поэтому эти двигатели называются унифилярными двигателями.
Управление шаговым двигателем с помощью переменных тактовых импульсов
Схема управления шаговым двигателем — это простая и недорогая схема, в основном используемая в приложениях с низким энергопотреблением. Схема, представленная на рисунке, состоит из 555 таймеров IC как стабильного мультивибратора. Частота рассчитывается с использованием данного отношения.
Частота = 1 / T = 1,45 / (RA + 2RB) C, где RA = RB = R2 = R3 = 4,7 кОм и C = C2 = 100 мкФ.
Управление шаговым двигателем путем изменения тактовых импульсовВыход таймера используется в качестве тактового сигнала для двух двойных триггеров 7474 «D» (U4 и U3), сконфигурированных как кольцевой счетчик. При первоначальном включении питания устанавливается только первый триггер (т. Е. Выход Q на выводе 5 U3 будет на логической «1»), а остальные три триггера сбрасываются (т. Е. Выход Q находится на логическом уровне. 0). При получении тактового импульса выход логической «1» первого триггера смещается на второй триггер (вывод 9 U3).
Таким образом, выход логической 1 продолжает циклически сдвигаться с каждым тактовым импульсом. Выходы Q всех четырех триггеров усиливаются решетками транзисторов Дарлингтона внутри ULN2003 (U2) и подключаются к обмоткам шагового двигателя оранжевого, коричневого, желтого, черного цветов на 16, 15, 14, 13 ULN2003, а красный — на + ve поставка.
Общая точка обмотки подключена к источнику постоянного тока +12 В, который также подключен к выводу 9 ULN2003. Цветовой код обмоток может варьироваться от производителя к производителю.Когда питание включено, управляющий сигнал, подключенный к контакту SET первого триггера и контактам CLR трех других триггеров, становится активным ‘низким’ (из-за схемы включения питания при сбросе, сформированной R1 -C1 комбинация), чтобы установить первый триггер и сбросить остальные три триггера.
При сбросе Q1 IC3 становится «высоким», в то время как все остальные выходы Q становятся «низкими». Внешний сброс может быть активирован нажатием переключателя сброса. Нажав переключатель сброса, вы можете остановить шаговый двигатель.При отпускании переключателя сброса двигатель снова начинает вращаться в том же направлении.
Разница между шаговым двигателем и серводвигателем
Серводвигатели подходят для приложений с высоким крутящим моментом и скоростью, тогда как шаговый двигатель дешевле, поэтому они используются там, где высокий удерживающий момент, ускорение с низким и средним, открытый в противном случае закрытый — требуется гибкость работы петли. Разница между шаговым двигателем и серводвигателем заключается в следующем.
| Шаговый двигатель | Серводвигатель |
| Двигатель, который движется дискретными шагами, известен как шаговый двигатель. | Серводвигатель — это один из видов двигателей с обратной связью, который подключен к энкодеру для обеспечения обратной связи по скорости и положению. |
| Шаговый двигатель используется там, где управление, а также точность являются основными приоритетами | Серводвигатель используется там, где скорость является основным приоритетом |
| Общее количество полюсов шагового двигателя колеблется от От 50 до 100 | Общее количество полюсов серводвигателя колеблется от 4 до 12 |
| В замкнутой системе эти двигатели движутся с постоянным импульсом | Этим двигателям требуется энкодер для изменения импульсов для управления положением. |
| Крутящий момент высокий на низкой скорости | Крутящий момент низкий на высокой скорости |
| Время позиционирования меньше при коротких ходах | Время позиционирования меньше при длинных ходах |
| Движение по инерции с высоким допуском | Перемещение по инерции с низким допуском |
| Этот двигатель подходит для механизмов с низкой жесткостью, таких как шкив и ремень | Не подходит для механизма с меньшей жесткостью |
| Высокая скорость реакции | Низкая скорость реакции |
| Эти используются для колеблющихся нагрузок | Они не используются для колеблющихся нагрузок |
| Регулировка усиления / настройки не требуется | Требуется регулировка усиления / настройки |
Шаговый двигатель против двигателя постоянного тока
Оба Шаговые двигатели и двигатели постоянного тока используются в различных промышленных приложениях, но • Основные различия между этими двумя двигателями немного сбивают с толку.Здесь мы перечисляем некоторые общие характеристики этих двух дизайнов. Каждая характеристика обсуждается ниже.
Характеристики | Шаговый двигатель | Двигатель постоянного тока | |||||
| Характеристики управления | 9012 Простой и не требует дополнительных микроконтроллеров | Низкая от 200 до 2000 об / мин | Умеренная | ||||
| Надежность | Высокая | Умеренная | |||||
| Эффективность | Низкая скорость | Высокая скорость | Максимальный крутящий момент при меньших скоростях | Высокий крутящий момент при меньших скоростях | |||
| Стоимость | Низкий | Низкий |
Параметры шагового двигателя
Параметры шагового двигателя в основном включают оборот, шаги за каждую секунду и об / мин.
Угол шага
Угол шага шагового двигателя можно определить как угол, под которым ротор двигателя поворачивается, когда на вход статора подается одиночный импульс. Разрешение двигателя можно определить как количество шагов двигателя и число оборотов ротора.
Разрешение = количество шагов / количество оборотов ротора
Расположение двигателя можно определить через угол шага и он выражается в градусах.Разрешение двигателя (номер шага) — нет. шагов, которые совершают за один оборот ротора. Когда угол шага двигателя небольшой, то разрешение для расположения этого двигателя является высоким.
Точность расположения объектов с помощью этого двигателя в основном зависит от разрешения. Как только разрешение будет высоким, точность будет низкой.
Некоторые точные двигатели могут создавать 1000 шагов за один оборот, включая угол шага 0,36 градуса.Типичный двигатель имеет угол шага 1,8 градуса с 200 шагами на каждый оборот. Различные углы шага, такие как 15 градусов, 45 градусов и 90 градусов, очень распространены в обычных двигателях. Количество углов может изменяться от двух до шести, а небольшой угол шага может быть достигнут за счет частей полюса с прорезями.
шагов для каждого оборота
Шаги для каждого разрешения могут быть определены как количество углов шага, необходимых для полного оборота. Формула для этого — 360 ° / угол шага.
шагов за каждую секунду
Этот тип параметра в основном используется для измерения количества шагов, пройденных за каждую секунду.
Число оборотов в минуту
Число оборотов в минуту — это число оборотов в минуту. Он используется для измерения частоты вращения. Таким образом, используя этот параметр, мы можем рассчитать количество оборотов за одну минуту. Основное соотношение между параметрами шагового двигателя следующее.
шагов на каждую секунду = число оборотов в минуту x шагов на оборот / 60
Шаговый двигатель, взаимодействующий с микроконтроллером 8051
Шаговый двигатель, взаимодействующий с 8051, очень прост благодаря использованию трех режимов, таких как волновой привод, полный шаговый привод и полушаг привод, подавая 0 и 1 на четыре провода двигателя в зависимости от того, какой режим привода мы должны выбрать для работы этого двигателя.
Остальные два провода необходимо подключить к источнику напряжения. Здесь используется униполярный шаговый двигатель, где четыре конца катушек подключены к основным четырем контактам порта 2 в микроконтроллере с помощью ULN2003A.
Этот микроконтроллер не обеспечивает достаточный ток для управления катушками, поэтому IC драйвера тока любит ULN2003A. Необходимо использовать ULN2003A, который представляет собой набор из 7 пар NPN транзисторов Дарлингтона. Проектирование пары Дарлингтона может быть выполнено с помощью двух биполярных транзисторов, которые соединены для достижения максимального усиления тока.
В ИС драйвера ULN2003A входные контакты — 7, выходные контакты — 7, где два контакта предназначены для подключения питания и заземления. Здесь используются контакты с 4 входами и 4 выходами. В качестве альтернативы ULN2003A, L293D IC также используется для усиления тока.
Вам нужно очень внимательно следить за двумя общими проводами и четырьмя проводами катушки, иначе шаговый двигатель не будет вращаться. Это можно увидеть, измерив сопротивление с помощью мультиметра, но мультиметр не будет отображать никаких показаний между двумя фазами проводов.Как только общий провод и два других провода находятся в одинаковой фазе, он должен показывать одинаковое сопротивление, тогда как две конечные точки катушек в аналогичной фазе будут демонстрировать двойное сопротивление по сравнению с сопротивлением между общей точкой, а также одной конечной точкой.
Поиск и устранение неисправностей
- Поиск и устранение неисправностей — это процесс проверки состояния двигателя, независимо от того, работает он или нет. Следующий контрольный список используется для поиска и устранения неисправностей шагового двигателя.
- Сначала проверьте соединения, а также код цепи.
- Если все в порядке, затем убедитесь, что двигатель получает надлежащее напряжение, иначе он просто вибрирует, но не вращается.
- Если напряжение питания хорошее, проверьте конечные точки четырех катушек, связанных с ULN2003A IC.
- Сначала найдите две общие конечные точки и подключите их к источнику питания 12 В, после этого подключите оставшиеся четыре провода к IC ULN2003A. Пока не запустится шаговый двигатель, попробуйте все возможные комбинации. Если подключение не выполнено надлежащим образом, этот двигатель будет вибрировать вместо вращения.
Могут ли шаговые двигатели работать непрерывно?
Как правило, все двигатели работают или вращаются непрерывно, но большинство двигателей не может остановиться, когда они находятся под напряжением. Когда вы пытаетесь ограничить вал двигателя, когда он находится под напряжением, он сгорит или сломается.
В качестве альтернативы шаговые двигатели разработаны так, чтобы делать дискретный шаг, а затем ждать там; снова шаг и оставайся там. Если мы хотим, чтобы двигатель оставался в одном месте на меньшее время, прежде чем снова сделать шаг, он будет выглядеть как непрерывно вращающийся.Энергопотребление этих двигателей велико, но рассеяние мощности в основном происходит, когда двигатель остановлен или неправильно спроектирован, тогда существует вероятность перегрева. По этой причине ток питания двигателя часто снижается, когда двигатель находится в удерживаемом положении в течение более длительного времени.
Основная причина в том, что когда двигатель вращается, его входная электрическая часть может быть изменена на механическую. Когда двигатель останавливается во время вращения, вся входная мощность может быть преобразована в тепло внутри катушки.
Преимущества
К преимуществам шагового двигателя относятся следующие.
- Надежность
- Простая конструкция
- Может работать в системе управления без обратной связи
- Низкое техническое обслуживание
- Работает в любой ситуации
- Надежность высокая
- Угол поворота двигателя пропорционален входному импульсу .
- Двигатель в состоянии покоя развивает полный крутящий момент.
- Точное позиционирование и повторяемость движения, так как хорошие шаговые двигатели имеют точность 3–5% шага, и эта ошибка не накапливается от одного шага к другому.
- Отличная реакция на пуск, остановку и движение задним ходом.
- Очень надежен, так как в двигателе нет контактных щеток. Следовательно, срок службы двигателя просто зависит от срока службы подшипника.
- Реакция двигателя на импульсы цифрового входа обеспечивает управление без обратной связи, что упрощает управление двигателем и снижает его стоимость.
- Можно достичь очень низкоскоростного синхронного вращения с нагрузкой, непосредственно связанной с валом.
- Можно реализовать широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Недостатки
К недостаткам шагового двигателя можно отнести следующее.
- Низкий КПД
- Крутящий момент двигателя будет быстро снижаться со скоростью
- Низкая точность
- Обратная связь не используется для определения возможных пропущенных шагов
- Малый крутящий момент относительно отношения инерции
- Чрезвычайно шумный
- Если двигатель не контролируется должным образом, тогда могут возникать резонансы.
- Работа этого двигателя не из легких на очень высоких скоростях.
- Требуется специальная схема управления.
- По сравнению с двигателями постоянного тока, он использует больший ток.
Приложения
Приложения шагового двигателя включают следующее.
- Промышленные машины — Шаговые двигатели используются в автомобильных датчиках и станках, автоматизированном производственном оборудовании.
- Security — новые продукты видеонаблюдения для индустрии безопасности.
- Медицина — Шаговые двигатели используются в медицинских сканерах, пробоотборниках, а также в цифровой стоматологической фотографии, жидкостных насосах, респираторах и оборудовании для анализа крови.
- Бытовая электроника — Шаговые двигатели в камерах для автоматической фокусировки и масштабирования цифровых камер.
А также есть приложения для бизнес-машин, приложения для компьютерной периферии.
Таким образом, это все об обзоре шагового двигателя, такого как конструкция, принцип работы, различия, преимущества, недостатки и области применения. Теперь у вас есть представление о типах супермоторов и их применении, если у вас есть какие-либо вопросы по этой теме или электрические и электронные проекты, оставьте комментарии ниже.
Photo Credit
Основы работы и принцип работы шагового двигателя
Основы шагового двигателя
Что такое шаговый двигатель? Шаговый двигатель — это исполнительный механизм, преобразующий электрический импульс в угловое смещение. Обычно при получении импульсного сигнала шаговый двигатель будет вращаться на фиксированный угол (а именно «угол шага») в соответствии с направлением, установленным для шагового двигателя. Объем углового смещения можно контролировать, контролируя количество импульсов для достижения цели точного позиционирования.Между тем, скорость вращения и ускорение двигателя можно контролировать, регулируя частоту импульсов для достижения цели управления скоростью.
Принцип работы шагового двигателя
Как работает шаговый двигатель? Ротор шагового двигателя представляет собой постоянный магнит, когда ток течет через обмотку статора, обмотка статора создает векторное магнитное поле. Магнитное поле заставляет ротор вращаться на угол, так что пара магнитных полей ротора и направление магнитного поля статора согласованы.Когда векторное магнитное поле статора поворачивается на угол, ротор также вращается вместе с магнитным полем на угол. Каждый раз, когда подается электрический импульс, двигатель вращается еще на один градус. Выходное угловое смещение пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности намотки, двигатель будет реверсивным. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя.
Типы шаговых двигателей
Шаговые двигатели делятся на три типа: шаговые двигатели с постоянными магнитами (PM), шаговые двигатели с переменным сопротивлением (VR) и гибридные шаговые двигатели (HB).
- Шаговый двигатель с постоянными магнитами обычно двухфазный, с небольшим крутящим моментом и малым объемом; его шаговый угол обычно составляет 7,5 ° или 15 °. Шаговый двигатель
- VR обычно трехфазный, может быть реализован высокий крутящий момент; угол шага обычно составляет 1,5, но шум и вибрация велики; Магнитная цепь ротора шагового двигателя VR изготовлена из магнитомягких материалов.На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости. Шаговый двигатель
- HB, показывающий смешение преимуществ PM и VR, делится на 2-фазный, 3-фазный и 5-фазный. Угол шага для 2-фазной схемы обычно составляет 1,8 °, для 3-фазной схемы — 1,2 ° и для 5-фазной схемы — 0,72 °. В основном это широко применяется.
Выбор шагового двигателя
- Угол шага: необходимо выбрать угол шага двигателя в соответствии с требованиями точности нагрузки.Наименьший коэффициент разрешения нагрузки обычно преобразуется в вал двигателя, обратите внимание на угол для каждого коэффициента разрешения, и угол шага двигателя должен быть равен или меньше угла. электродвигатель 0,9 ° / 1,8 °, 3-фазный 1,2 ° и 5-фазный 0,36 ° / 0,72 °. 2-фазный шаговый двигатель ATO имеет угол шага 1,8 градуса, а 3-фазный шаговый двигатель — угол шага 1,2 градуса.
- Статический крутящий момент: выберите статический крутящий момент в соответствии с нагрузкой двигателя, при этом нагрузку можно разделить на инерционную и фрикционную.При прямом запуске двигателя (обычно с низкой скорости на высокую) следует учитывать два вида нагрузки. При запуске двигателя с ускорением учитывайте инерционную нагрузку; когда двигатель вращается с постоянной скоростью, учитывайте только фрикционную нагрузку. Как правило, статический крутящий момент должен быть в пределах 2-3-кратной нагрузки трения.
- Ток: Что касается двигателей с одинаковым статическим крутящим моментом, их характеристики движения сильно различаются из-за разницы в текущих параметрах.О величине тока можно судить по графику характеристической кривой крутящего момента и частоты.
Если вы ищете шаговый двигатель Nema 17, шаговый двигатель Nema 23, шаговый двигатель Nema 34, сайт ATO.com — лучший выбор для вас.
Что такое шаговый двигатель?
Шаговый двигатель — это бесщеточный синхронный электродвигатель, который преобразует цифровые импульсы в механическое вращение вала. Его нормальное движение вала состоит из дискретных угловых перемещений. движения практически одинаковой величины при управлении от последовательно переключаемого постоянного тока источник питания.Шаговый двигатель — это устройство цифрового ввода-вывода. Он особенно хорошо подходит для приложение, в котором управляющие сигналы появляются в виде цифровых импульсов, а не аналоговых напряжений. Один цифровой импульс на привод шагового двигателя или преобразователь заставляет двигатель увеличивать один точный угол движения. По мере увеличения частоты цифровых импульсов шаговое движение меняется на непрерывное вращение.
Некоторые промышленные и научные применения шаговых двигателей включают робототехнику, станки, механизмы захвата и размещения, автоматизированные машины для резки и склеивания проволоки, и даже устройства точного контроля жидкости.
Как работает шаговый двигатель?
Каждый оборот шагового двигателя делится на дискретное количество шагов, во многих случаях 200 шагов, и для каждого шага двигателю необходимо посылать отдельный импульс. Шаговый двигатель может делать только один шаг за раз, и каждый шаг одинакового размера.Поскольку каждый импульс заставляет двигатель вращаться на точный угол, обычно 1,8 °, положением двигателя можно управлять без какого-либо механизма обратной связи.По мере увеличения частоты цифровых импульсов шаговое движение переходит в непрерывное вращение, при этом скорость вращения прямо пропорциональна частоте импульсов.
Шаговые двигатели используются каждый день как в промышленных, так и в коммерческих целях из-за их низкой стоимости, высокой надежности, высокого крутящего момента на низких скоростях и простой, прочной конструкции, которая работает практически в любых условиях.
- Угол поворота двигателя пропорционален входному импульсу.
- Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением).
- Точное позиционирование и повторяемость движения, поскольку хорошие шаговые двигатели имеют точность от 3 до 5% шага, и эта ошибка не накапливается от одного шага к другому.
- Отличная реакция на пуск / остановку / движение задним ходом.
- Очень надежен, так как в двигателе нет контактных щеток.Следовательно, срок службы шагового двигателя просто зависит от срока службы подшипника.
- Шаговые двигатели, реагирующие на импульсы цифрового входа, обеспечивают управление без обратной связи, что упрощает управление двигателем и снижает его стоимость.
- Можно добиться синхронного вращения на очень низкой скорости с нагрузкой, непосредственно связанной с валом.
- Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Выбор шагового двигателя и контроллера
Выбор шагового двигателя зависит от требований к крутящему моменту и скорости. Используйте кривую крутящего момента двигателя (указанную в технических характеристиках каждого привода), чтобы выбрать двигатель, который будет выполнять эту работу.Каждый контроллер шагового двигателя в строке Omegamation показывает кривые крутящий момент-скорость для рекомендуемых двигателей этого привода. Если ваши требования к крутящему моменту и скорости могут быть удовлетворены с помощью нескольких шаговых двигателей, выберите контроллер, основанный на потребностях вашей системы движения — шаг / направление, автономный программируемый, аналоговые входы, микрошаговый — затем выберите один из рекомендуемых двигателей для этого контроллера. .
Список рекомендуемых двигателей основан на обширных испытаниях, проведенных производителем для обеспечения оптимальной производительности комбинации шагового двигателя и контроллера.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей:- Активный ротор: шаговый двигатель с постоянными магнитами (PM)
- Реактивный ротор: шаговый двигатель с регулируемым сопротивлением (VR)
- Комбинация VR и PM: гибридный шаговый двигатель (HY)
Шаговый двигатель с постоянным магнитом
Этот тип шагового двигателя имеет ротор с постоянными магнитами. Статор может быть аналогичен традиционному 2- или 3-фазному индукционному двигатель или сконструированный аналогично штампованному двигателю. Последний является самый популярный тип шагового двигателя.a.) Обычный постоянный магнит. На рисунке 1 показана схема обычного шаговый двигатель с ротором с постоянными магнитами.2-х фазная обмотка проиллюстрировано. На рисунке 1а показана фаза А. запитан с положительной клеммы «A». Поле находится под углом 0 °. Когда катушка намотана, как показано, северный полюс ротор также находится на 0 °.
Вал совершает один оборот за каждый полный оборот электромагнитного поля в этом двигателе. На рисунке 2 показан один и тот же шаговый двигатель с обеими обмотками под напряжением. Важный разница здесь в том, что результирующее электромагнитное поле находится между два полюса.На рисунке 2 поле переместилось на 45 ° от поле на Рисунке 1.
Как и в схеме однофазного включения, вал завершает один оборот за каждый полный оборот электромагнитного поля. Должно быть очевидно, что этот мотор может полушага; т.е. шаг в малом шаг шага. Это возможно за счет сочетания подачи питания показано на Рисунке 1, с показанным на Рисунке 2. На Рисунке 3 показаны схемы Шаговый двигатель с постоянными магнитами с полушаговым движением ротора.
Как и на предыдущих схемах, ротор и вал движутся через тот же угол, что и поле. Обратите внимание, что каждый шаг приводил к повороту на 45 °. вместо 90 ° на предыдущей диаграмме. Шаговый двигатель с постоянным магнитом может быть намотан бифилярным двигателем. обмотки, чтобы избежать необходимости менять полярность обмотка. На рисунке 4 показана бифилярная обмотка при В таблице IV показана последовательность включения.
Бифилярные обмотки проще переключать с помощью транзисторного контроллера.Требуется меньше переключающих транзисторов. б.) Штампованные или штабелированные шаговые двигатели с постоянными магнитами. В самый популярный тип шагового двигателя с постоянным магнитом — это так называется штампованным типом, зубчатым когтем, листовым металлом, жестяной банкой или просто невысокая стоимость мотора. Этот мотор сложно проиллюстрировать наглядно из-за того, как он построен.
Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями на внутри реагирует с ротором.Каждый корпус катушки имеет одинаковый количество зубьев как количество полюсов ротора. Корпуса радиально смещены друг относительно друга на половину шага зубьев.
Шаговый двигатель с регулируемым сопротивлением
Этот тип шагового двигателя имеет электромагнитный статор с ротор из магнитомягкого железа с зубьями и пазами, подобными ротору ротор индукторного генератора. В то время как двигатели с постоянными магнитами в основном Для 2-фазных машин, для двигателей VR требуется не менее 3-х фаз. Большинство VR шаговые двигатели имеют 3 или 4 фазы, хотя 5-фазные двигатели VR имеется в наличии.В шаговом двигателе VR поле движется с другой скоростью, чем ротор.
Обратите внимание, что катушка фазы A имеет два южные полюса и отсутствие северных полюсов для пути возврата потока. Вы можете отдохнуть уверен, что будет один. Поток вернется через путь наименьшего сопротивления, а именно через пары полюсов, которые являются ближайшими до двух зубьев ротора. Это зависит от положения ротора. Поток индуцирует напряжение в катушках, намотанных на полюс. Это вызывает ток в обмотка, замедляющая ротор.Величина тока определяется напряжение на катушке. Катушка с диодным зажимом будет иметь больше тока, чем резисторный диод или обмотка с фиксатором стабилитрона.
Гибридный шаговый двигатель
Этот тип двигателя часто называют постоянным магнитом. мотор. Он использует комбинацию постоянного магнита и переменного структура сопротивления. Его конструкция аналогична конструкции Индукционный двигатель.Ротор имеет два концевые детали (хомуты) с выступающими полюсами, расположенными на одинаковом расстоянии, но радиально смещены друг от друга на половину шага зубьев.Круглый перманент магнит разделяет их. Ярма имеют практически равномерный поток. противоположной полярности. Статор изготовлен из многослойной стали. Некоторые двигатели имеют 4 катушки. в двух группах по 2 катушки последовательно. Одна пара катушек называется фазой A и другая фаза B.
Число полных шагов на оборот может быть определено из по следующей формуле:
SPR = NR x Ø
Где: SPR = количество шагов на оборот
NR = общее количество зубьев ротора (всего для оба хомута)
Ø = количество фаз двигателя
или: NR = SPR / Ø
Они сконструированы с полюсами статора с несколькими зубьями и ротором с постоянными магнитами.Стандартные гибридные двигатели имеют 200 зубцов ротора и вращаются с шагом 1,8 °. Поскольку они демонстрируют высокий статический и динамический крутящий момент и работают с очень высокой частотой шагов, гибридные шаговые двигатели используются в широком спектре коммерческих приложений, включая компьютерные дисководы, принтеры / плоттеры и проигрыватели компакт-дисков.
Пошаговые режимы
«Шаговые режимы» шагового двигателя включают полный, половинный и микрошаговый. Тип выхода шагового режима любого шагового двигателя зависит от конструкции контроллера.Omegamation ™ предлагает приводы с шаговыми двигателями с переключателем полного и половинного шагов, а также микрошаговые приводы с выбираемым переключателем или программным выбором разрешения.Полный шаг
Стандартные гибридные шаговые двигатели имеют 200 зубцов ротора или 200 полных шагов на оборот вала двигателя. Разделение 200 шагов на 360 ° вращения равняется полному углу шага 1,8 °. Обычно режим полного шага достигается за счет подачи питания на обе обмотки при попеременном реверсировании тока.По сути, один цифровой импульс от драйвера эквивалентен одному шагу.Полушаг
Полушаг просто означает, что шаговый двигатель вращается со скоростью 400 шагов за оборот. В этом режиме запитывается одна обмотка, а затем поочередно запитываются две обмотки, в результате чего ротор вращается на половину расстояния, или 0,9 °. Хотя он обеспечивает примерно на 30% меньший крутящий момент, полушаговый режим обеспечивает более плавное движение, чем полушаговый режим.Microste
Микрошаговый двигатель — это относительно новая технология шагового двигателя, которая регулирует ток в обмотке двигателя до такой степени, что дополнительно подразделяет количество позиций между полюсами.Микрошаговые приводыOmegamation способны разделять полный шаг (1,8 °) на 256 микрошагов, что дает 51 200 шагов на оборот (0,007 ° / шаг). Микрошаг обычно используется в приложениях, требующих точного позиционирования и более плавного движения в широком диапазоне скоростей. Как и полушаговый режим, микрошаговый режим обеспечивает примерно на 30% меньше крутящего момента, чем полушаговый режим.
Управление линейным шаговым двигателем
Вращательное движение шагового двигателя может быть преобразовано в линейное движение с помощью системы привода ходового винта / червячной передачи (см. Рисунок B).Шаг или шаг ходового винта — это линейное расстояние, пройденное за один оборот винта. Если шаг равен одному дюйму на оборот, и есть 200 полных шагов на оборот, то разрешение системы ходового винта составляет 0,005 дюйма на шаг. Еще более высокое разрешение возможно при использовании шагового двигателя / системы привода в микрошаговом режиме. Серияв сравнении с параллельным подключением
Есть два способа подключения шагового двигателя: последовательно или параллельно.Последовательное соединение обеспечивает высокую индуктивность и, следовательно, больший крутящий момент на низких скоростях. Параллельное соединение снижает индуктивность, что приводит к увеличению крутящего момента на более высоких скоростях.Контроллер шагового двигателя Обзор технологии
Драйвер получает сигналы шага и направления от индексатора или контроллера шагового двигателя и преобразует их в электрические сигналы для запуска шагового двигателя. На каждую ступень вала двигателя требуется один импульс.В полношаговом режиме со стандартным 200-шаговым двигателем требуется 200 шаговых импульсов для совершения одного оборота. Скорость вращения прямо пропорциональна частоте импульсов. Некоторые системы управления имеют встроенный генератор, который позволяет использовать внешний аналоговый сигнал или джойстик для установки скорости двигателя.
Скорость и крутящий момент шагового двигателя основаны на протекании тока от драйвера к обмотке двигателя. Фактор, который препятствует потоку или ограничивает время, необходимое току для возбуждения обмотки, известен как индуктивность.Влияние индуктивности, большинство типов цепей управления предназначены для подачи большего количества напряжения, чем номинальное напряжение двигателя.
Чем выше выходное напряжение контроллера, тем выше уровень крутящего момента в зависимости от скорости. Как правило, выходное напряжение драйвера (напряжение шины) должно быть в 5-20 раз выше номинального напряжения двигателя. Чтобы защитить двигатель от повреждения, привод шагового двигателя должен быть ограничен по току до номинального тока шагового двигателя.
Обзор контроллера шагового двигателя
Индексатор, или контроллер шагового двигателя, выдает драйверу выходные данные шага и направления. Для большинства приложений требуется, чтобы индексатор управлял и другими функциями управления, включая ускорение, замедление, количество шагов в секунду и расстояние. Индексатор также может взаимодействовать со многими другими внешними сигналами и управлять ими.Связь с системой управления осуществляется через последовательный порт RS-232 и в некоторых случаях порт RS485.В любом случае контроллер шагового двигателя способен принимать высокоуровневые команды от главного компьютера и генерировать необходимые импульсы шага и направления для драйвера.
Контроллер включает в себя дополнительные входы / выходы для контроля входов от внешних источников, таких как пусковой, толчковый, исходный или концевой выключатель. Он также может запускать другие функции машины через выходные контакты ввода / вывода.
Автономная работа
В автономном режиме контроллер может работать независимо от главного компьютера.После загрузки в энергонезависимую память программы движения можно запускать с различных типов операторских интерфейсов, таких как клавиатура или сенсорный экран, или с переключателя через вспомогательные входы / выходы.Автономная система управления шаговым двигателем часто комплектуется драйвером, источником питания и дополнительной обратной связью энкодера для приложений с «замкнутым контуром», требующих обнаружения опрокидывания и точной компенсации положения двигателя.
Многоосевое управление
Многие приложения для управления движением требуют управления более чем одним шаговым двигателем.В таких случаях доступен контроллер многоосного шагового двигателя. К сетевому концентратору HUB 444, например, может быть подключено до четырех шаговых приводов, причем каждый привод подключен к отдельному шаговому двигателю. Сетевой концентратор обеспечивает скоординированное перемещение приложений, требующих высокой степени синхронизации, например круговой или линейной интерполяции. Шаговый двигатель: работа, конструкция, типы, преимущества и недостатки
Сегодня мы поговорим о шаговом двигателе, его работе, типах, преимуществах, недостатках с его функциональной областью.Проще говоря, это комбинация двигателя постоянного тока с электроникой, которая позволяет двигателю вращаться и останавливаться под заданным углом. Это в основном используется в робототехнике, где переместите руку робота под заданным углом и удерживайте ее в течение некоторого времени, а затем вернитесь обратно.
Это бесщеточное электромеханическое устройство, которое используется для преобразования серии электрических импульсов, подаваемых на их обмотку возбуждения, в точно определенное пошаговое механическое вращение вала. Другими словами, шаговый двигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую.
Это особый тип двигателя постоянного тока, который не вращается непрерывно, но полный оборот делится на количество равных шагов. Он работает по принципу работы магнитов, заставляющих вал поворачиваться на точное расстояние при подаче электрического импульса.
В шаговом двигателе количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала регулируется путем управления количеством импульсов. Эти уникальные особенности, которые отличаются от серводвигателя, делают шаговый двигатель подходящим для системы управления без обратной связи, в которой точное положение вала поддерживается с точным числом импульсов без использования датчика обратной связи.
Если угол шага меньше, то тем больше будет количество шагов на оборот и выше будет точность полученного положения. Угол шага может составлять от 90 градусов до 0,72 градуса, однако обычно используемые углы шага составляют 1,8, 2,5, 7,5 и 15 градусов.
Строительство:Шаговый двигатель состоит из статора и ротора. Ротор — подвижная часть, не имеющая обмотки, щеток и коллектора.Статор состоит из многополюсной и многофазной обмотки, обычно из трех или четырех фаз обмотки, намотанной на необходимое количество полюсов, определяемое желаемым угловым смещением на входные импульсы.
Рабочий:Шаговый двигатель работает по принципу электромагнетизма. Вал магнитного ротора окружен статорами электромагнетизма. Ротор и статор имеют полюса, которые могут иметь или не иметь зубчатые зацепления в зависимости от типа статора. Когда статоры возбуждают ротор, он перемещается, чтобы выровняться со статором.Таким образом, статоры получают питание в последовательности на разных полюсах, чтобы вращать шаговый двигатель. Благодаря очень хорошему контролю скорости, вращения, направления и углового положения, они представляют особый интерес для систем управления промышленными процессами, станков с ЧПУ, робототехники, систем автоматизации производства и контрольно-измерительных приборов.
Типы шаговых двигателей:- Шаговый двигатель с регулируемым сопротивлением.
- Шаговый двигатель с постоянным магнитом.
- Гибридный шаговый двигатель.
Шаговый двигатель с регулируемым сопротивлением имеет простую конструкцию с мягким чугуном, немагнитным зубчатым ротором и электромагнитными статорами с обмоткой. Нет притяжения между ротором и обмоткой статора, когда обмотка находится под напряжением, поскольку ротор не намагничен. Когда к противоположной паре обмоток подключается ток, создается магнитное поле с силовыми линиями, которые проходят от полюсов статора через ближайший набор полюсов на роторе.Это дает угол ступеней 7,5 или 15 градусов.
2. Шаговый двигатель с постоянным магнитом:Шаговый двигатель с постоянными магнитами имеет ротор с постоянными магнитами, намагниченный в осевом направлении. Это означает, что он имеет чередующиеся северный и южный полюса, параллельные валу ротора. Каждый полюс намотан с обмоткой возбуждения, катушки на противоположной паре полюсов включены последовательно. Ток подается от источника постоянного тока к обмотке через переключатели. Ротор представляет собой постоянный магнит, и, таким образом, когда на пару полюсов статора подается ток, ротор перемещается, чтобы выровняться с ним.Угол шага этого мотора составляет 1,8, 7,5,15,30,34 и 90 градусов.
3. Гибридный шаговый двигатель:Гибридный шаговый двигатель представляет собой комбинацию электродвигателя с постоянным и переменным сопротивлением. Он имеет постоянный магнит, зубчатый ротор, состоящий из двух противоположных по полярности секций или чашек, зубья которых смещены друг относительно друга. Ротор устанавливается в положение с минимальным сопротивлением в ответ на то, что пара катушек статора находится под напряжением. Угол шага этого двигателя равен 0.9 или 1,8 градуса.
Вы также можете посмотреть это видео, чтобы узнать о различных типах и принципах работы шагового двигателя.
Преимущества:
- Угол поворота пропорционален входным импульсам.
- Полный крутящий момент в состоянии покоя.
- Возможно достижение синхронного вращения на очень низкой скорости.
- Щеток нет, значит надежно.
- Скорость прямо пропорциональна частоте входных импульсов; следовательно, может быть реализован широкий диапазон скорости вращения.
- Низкая скорость с высокой точностью.
- Нет системы обратной связи.
- Низкий КПД.
- Может производить больше шума.
- Трудно работать на очень высокой скорости.
- Для плавного хода требуется микрошаг.
- Автоматизация производства.
- Упаковка.
- Погрузочно-разгрузочные работы.
- Аэрокосмическая промышленность, особенно в авионике.
- Система получения 3D изображений.
- Лазерные измерения.
- Робототехника.
Это все о работе шагового двигателя, типах и т. Д. Если у вас есть какие-либо вопросы по пересмотру этой статьи, задавайте их, комментируя. Если вам понравилась эта статья, не забудьте поделиться ею в социальных сетях. Подпишитесь на наш сайт для получения более информативных статей. Спасибо, что прочитали.
Что такое шаговый двигатель? Типы, конструкция, работа и применение
Типы шаговых двигателей — их конструкция, работа и применениеИзобретение специальных карт драйверов шаговых двигателей и других технологий цифрового управления для сопряжения шагового двигателя с системами на базе ПК являются причиной широкого распространения шаговых двигателей в последнее время.Шаговые двигатели становятся идеальным выбором для систем автоматизации, требующих точного управления скоростью или точного позиционирования, либо того и другого.
Поскольку мы знаем, что многие промышленные электродвигатели используются с управлением с обратной связью с обратной связью для достижения точного позиционирования или точного управления скоростью, с другой стороны, шаговый двигатель может работать с контроллером без обратной связи. Это, в свою очередь, снижает общую стоимость системы и упрощает конструкцию машины по сравнению с сервосистемой управления. Кратко остановимся на шаговом двигателе и его типах .
Что такое шаговый двигатель?Шаговый двигатель — это бесщеточное электромеханическое устройство, которое преобразует последовательность электрических импульсов, приложенных к их обмоткам возбуждения, в точно определенное пошаговое механическое вращение вала. Вал двигателя вращается на фиксированный угол для каждого дискретного импульса. Это вращение может быть линейным или угловым, при вводе одиночного импульса происходит одно шаговое движение.
Когда применяется последовательность импульсов, она поворачивается на определенный угол.Угол поворота вала шагового двигателя для каждого импульса называется углом шага, который обычно выражается в градусах.
Количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала двигателя регулируется путем управления количеством импульсов. Эта уникальная особенность делает шаговый двигатель подходящим для системы управления без обратной связи, в которой точное положение вала поддерживается с помощью точного количества импульсов без использования датчика обратной связи.
Если угол шага меньше, тем больше будет количество шагов на оборот и выше будет точность полученного положения. Углы шага могут составлять от 90 градусов до 0,72 градуса, однако обычно используемые углы шага составляют 1,8 градуса, 2,5 градуса, 7,5 градуса и 15 градусов.
Направление вращения вала зависит от последовательности импульсов, подаваемых на статор. Скорость вала или средняя скорость двигателя прямо пропорциональна частоте (частоте входных импульсов) входных импульсов, подаваемых на обмотки возбуждения.Следовательно, если частота низкая, шаговый двигатель вращается ступенчато, а при высокой частоте он постоянно вращается, как двигатель постоянного тока, из-за инерции.
Как и все электродвигатели, он имеет статор и ротор. Ротор — подвижная часть, не имеющая обмоток, щеток и коллектора. Обычно роторы либо с переменным магнитным сопротивлением, либо с постоянными магнитами. Статор часто состоит из многополюсных и многофазных обмоток, обычно из трех или четырех фазных обмоток, намотанных на необходимое количество полюсов, определяемое желаемым угловым смещением на входной импульс.
В отличие от других двигателей, он работает с запрограммированными дискретными импульсами управления, которые подаются на обмотки статора через электронный привод. Вращение происходит за счет магнитного взаимодействия между полюсами последовательно включенной обмотки статора и полюсами ротора.
Конструкция шагового двигателяНа сегодняшнем рынке доступно несколько типов шаговых двигателей с широким диапазоном размеров, количества шагов, конструкций, проводки, передачи и других электрических характеристик.Поскольку эти двигатели могут работать в дискретном режиме, они хорошо подходят для взаимодействия с устройствами цифрового управления, такими как компьютеры.
Благодаря точному контролю скорости, вращения, направления и углового положения, они представляют особый интерес в системах управления производственными процессами, станках с ЧПУ, робототехнике, системах автоматизации производства и контрольно-измерительных приборах.
Типы шаговых двигателейСуществует три основных категории шаговых двигателей , а именно:
- Шаговый двигатель с постоянным магнитом
- Шаговый двигатель с регулируемым сопротивлением
- Гибридный шаговый двигатель
Во всех этих двигателях в статоре используются обмотки возбуждения, где количество обмоток относится к количеству фаз.Напряжение постоянного тока подается в качестве возбуждения на катушки обмоток, и каждый вывод обмотки подключается к источнику через твердотельный переключатель. Конструкция его ротора зависит от типа шагового двигателя: ротор из мягкой стали с выступающими полюсами, цилиндрический ротор с постоянными магнитами и постоянный магнит с зубьями из мягкой стали. Обсудим эти типы подробнее.
Шаговый двигатель с переменным сопротивлениемЭто базовый тип шагового двигателя , который существует уже долгое время и обеспечивает самый простой способ понять принцип работы с точки зрения конструкции.Как следует из названия, угловое положение ротора зависит от сопротивления магнитной цепи, образованной между полюсами (зубьями) статора и зубьями ротора.
Шаговый двигатель с регулируемым сопротивлением Конструкция шагового двигателя с регулируемым сопротивлениемОн состоит из статора с обмоткой и ротора с несколькими зубьями из мягкого железа. Статор состоит из листов кремнистой стали, на которые намотаны обмотки статора. Обычно он наматывается на три фазы, которые распределяются между парами полюсов.
Количество полюсов на статоре, сформированное таким образом, равно кратному количеству фаз, для которых обмотки намотаны на статоре. На рисунке ниже статор имеет 12 равноотстоящих полюсов, каждый из которых намотан возбуждающей катушкой. Эти три фазы запитываются от источника постоянного тока с помощью твердотельных переключателей.
Ротор не имеет обмоток и является явнополюсным, полностью изготовленным из стальных пластин с прорезями. Выступающие зубья полюса ротора имеют такую же ширину, как и зубцы статора.Число полюсов статора отличается от числа полюсов ротора, что обеспечивает возможность самозапуска и двунаправленного вращения двигателя.
Отношение полюсов ротора к полюсам статора для трехфазного шагового двигателя определяется как Nr = Ns ± (Ns / q). Здесь Ns = 12 и q = 3, и, следовательно, Nr = 12 ± (12/3) = 16 или 8. Ниже показан 8-полюсный ротор без возбуждения.
Конструкция шагового двигателя с переменным сопротивлением Работа шагового двигателя с переменным сопротивлением
Шаговый двигатель работает по принципу , согласно которому ротор совмещается в определенном положении с зубцами полюса возбуждения в магнитной цепи с минимальным сопротивлением. путь существует.Когда к двигателю подается питание, возбуждая определенную обмотку, он создает свое магнитное поле и развивает свои собственные магнитные полюса.
Из-за остаточного магнетизма в полюсах магнита ротора это заставит ротор перемещаться в такое положение, чтобы достичь положения минимального сопротивления, и, следовательно, один набор полюсов ротора выровнен с набором полюсов статора под напряжением. В этом положении ось магнитного поля статора совпадает с осью, проходящей через любые два магнитных полюса ротора.
Когда ротор совмещен с полюсами статора, он обладает достаточной магнитной силой, чтобы удерживать вал от перемещения в следующее положение по часовой стрелке или против часовой стрелки.
Рассмотрим принципиальную схему трехфазного, 6 полюсов статора и 4 зубьев ротора, показанную на рисунке ниже. Когда фаза A-A ’снабжается источником постоянного тока путем замыкания переключателя -1, обмотка становится магнитом, в результате чего один зуб становится северным, а другой — южным. Таким образом, магнитная ось статора лежит вдоль этих полюсов.
За счет силы притяжения, северный полюс обмотки статора притягивает ближайший зуб ротора противоположной полярности, то есть южный и южный полюс притягивают ближайший зубец ротора противоположной полярности, то есть север. Затем ротор настраивается в положение с минимальным сопротивлением, при котором магнитная ось ротора точно совпадает с магнитной осью статора.
Работа шагового двигателя с переменным сопротивлениемКогда на фазу B-B ‘подается питание путем замыкания переключателя -2, сохраняя фазу A-A’ обесточенной путем размыкания переключателя-1, обмотка B-B ‘будет создавать магнитный поток и, следовательно, магнитная ось статора смещается вдоль образованных им полюсов.Следовательно, ротор смещается в сторону наименьшего сопротивления с намагниченными зубьями статора и вращается на угол 30 градусов по часовой стрелке.
Когда переключатель-3 находится под напряжением после размыкания переключателя-2, включается фаза C-C ’, зубья ротора выравниваются в новом положении, перемещаясь на дополнительный угол 30 градусов. Таким образом, ротор движется по часовой стрелке или против часовой стрелки, последовательно возбуждая обмотки статора в определенной последовательности. Угол шага этого 3-фазного 4-полюсного шагового двигателя с зубцами ротора выражается как 360 / (4 × 3) = 30 градусов (как угол шага = 360 / Nr × q).
Угол шага можно дополнительно уменьшить, увеличив количество полюсов на статоре и роторе, в этом случае двигатели часто имеют дополнительные фазные обмотки. Это также может быть достигнуто за счет принятия другой конструкции шаговых двигателей , такой как многостековый механизм и механизм понижающей передачи.
Шаговый двигатель с постоянным магнитомДвигатель с постоянным магнитом, пожалуй, самый распространенный среди нескольких типов шаговых двигателей.Как следует из названия, он добавляет постоянные магниты в конструкцию двигателя. Этот тип шаговых двигателей также называется двигателем с жестяным стеклопакетом или двигателем с жестяной коробкой . Главное достоинство этого мотора — невысокая стоимость изготовления. Этот тип двигателя имеет 48-24 шага на оборот.
Шаговый двигатель с постоянным магнитом Конструкция Шаговый двигатель с постоянным магнитомВ этом двигателе статор является многополюсным, и его конструкция аналогична конструкции шагового двигателя с переменным сопротивлением, как описано выше.Он состоит из периферии с прорезями, на которые намотаны катушки статора. Он имеет выступающие полюса на щелевой конструкции, где намотанные обмотки могут быть двух-, трех- или четырехфазными.
Концевые выводы всех этих обмоток выкуплены и подключены к возбуждению постоянного тока через твердотельные переключатели в цепи управления.
Конструкция Шаговый двигатель с постоянным магнитомРотор изготовлен из материала постоянного магнита, такого как феррит, который может иметь форму цилиндрического или выступающего полюса, но обычно это гладкий цилиндрический тип.Ротор спроектирован так, чтобы иметь четное количество полюсов постоянного магнита с чередованием северной и южной полярностей.
Работа шагового двигателя с постоянным магнитомПринцип действия этого двигателя основан на том, что разные полюса притягиваются друг к другу, а подобные полюса отталкиваются. Когда обмотки статора возбуждаются источником постоянного тока, он создает магнитный поток и устанавливает северный и южный полюса. Из-за силы притяжения и отталкивания между полюсами ротора постоянного магнита и полюсами статора ротор начинает перемещаться в положение, для которого на статор подаются импульсы.
Рассмотрим двухфазный шаговый двигатель с двумя полюсами ротора с постоянными магнитами, как показано на рисунке ниже.
Работа шагового двигателя с постоянным магнитом:Когда фаза A запитана плюсом по отношению к A ’, обмотки устанавливают северный и южный полюса. Из-за силы притяжения полюса ротора совпадают с полюсами статора, так что ось магнитного полюса ротора согласовывается с осью статора, как показано на рисунке.
Когда возбуждение переключается на фазу B и отключается фаза A, ротор дополнительно настраивается на магнитную ось фазы B и, таким образом, поворачивается на 90 градусов по часовой стрелке.
Затем, если фаза A питается отрицательным током по отношению к A ’, образование полюсов статора заставляет ротор перемещаться еще на 90 градусов по часовой стрелке.
Таким же образом, если фаза B возбуждается отрицательным током путем замыкания переключателя фазы A, ротор поворачивается еще на 90 градусов в том же направлении. Затем, если фаза A возбуждается положительным током, ротор возвращается в исходное положение, совершая полный оборот на 360 градусов.Это означает, что всякий раз, когда статор возбужден, ротор стремится повернуться на 90 градусов по часовой стрелке.
Угол шага этого 2-фазного 2-полюсного роторного двигателя с постоянными магнитами выражается как 360 / (2 × 2) = 90 градусов. Размер шага может быть уменьшен за счет одновременного включения двух фаз или последовательности режимов однофазного включения и двухфазного включения с правильной полярностью.
Гибридный шаговый двигательЭто самый популярный тип шагового двигателя типа , поскольку он обеспечивает лучшую производительность, чем ротор с постоянными магнитами, с точки зрения шагового разрешения, удерживающего момента и скорости.Однако эти двигатели дороже шаговых двигателей с постоянными магнитами. Он сочетает в себе лучшие характеристики шаговых двигателей с переменным сопротивлением и шаговых двигателей с постоянными магнитами. Эти двигатели используются в приложениях, где требуется очень маленький шаговый угол, например 1,5, 1,8 и 2,5 градуса.
Гибридный шаговый двигатель Конструкция гибридного шагового двигателяСтатор этого двигателя такой же, как у его аналога с постоянным магнитом или реактивного типа. Катушки статора намотаны на чередующиеся полюсы.При этом катушки разных фаз намотаны на каждый полюс, обычно две катушки на полюсе, что называется бифилярным соединением.
Ротор состоит из постоянного магнита, намагниченного в осевом направлении для создания пары магнитных полюсов (полюсов N и S). Каждый полюс покрыт равномерно расположенными зубцами. Зубья состоят из мягкой стали и двух секций, на каждом полюсе которых смещены друг к другу с шагом в ползуба.
Работа гибридного шагового двигателя
Этот двигатель работает так же, как и шаговый двигатель с постоянными магнитами.На рисунке выше показан двухфазный, 4-полюсный гибридный шаговый двигатель с 6 зубьями. Когда фаза A-A ’возбуждается источником постоянного тока, сохраняя невозбужденный B-B’, ротор выравнивается так, что южный полюс ротора обращен к северному полюсу статора, а северный полюс ротора обращен к южному полюсу статора.
Работа гибридного шагового двигателяТеперь, если фаза B-B ‘возбуждена, удерживая A-A’ выключенным таким образом, что верхний полюс становится северным, а нижний — южным, тогда ротор выровняется в новое положение на движение против часовой стрелки.Если фаза B-B ’возбуждается противоположно, так что верхний полюс становится южным, а нижний — северным, то ротор будет вращаться по часовой стрелке.
При правильной последовательности импульсов на статор двигатель будет вращаться в желаемом направлении. При каждом возбуждении ротор блокируется в новом положении, и даже если возбуждение снимается, двигатель все еще сохраняет заблокированное состояние из-за возбуждения постоянным магнитом. Угол шага этого 2-фазного, 4-полюсного, 6-зубчатого роторного двигателя составляет 360 / (2 × 6) = 30 градусов.На практике гибридные двигатели конструируются с большим количеством полюсов ротора для получения высокого углового разрешения.
Униполярные и биполярные шаговые двигателиРассмотренные выше двигатели могут быть униполярными или биполярными в зависимости от расположения обмоток катушки. Используется униполярный двигатель с двумя обмотками на фазу, и, следовательно, направление тока через эти обмотки изменяет вращение двигателя. В этой конфигурации ток проходит в одном направлении в одной катушке и в противоположном направлении в другой катушке.
На рисунке ниже показан двухфазный униполярный шаговый двигатель, в котором катушки A и C предназначены для одной фазы, а B и D — для другой фазы. В каждой фазе каждая катушка проводит ток в направлении, противоположном направлению тока другой катушки. Только одна катушка будет пропускать ток в каждой фазе для достижения определенного направления вращения. Таким образом, просто переключая клеммы на каждую катушку, можно управлять направлением вращения.
Работа двухфазного униполярного шагового двигателяВ случае биполярного шагового двигателя каждая фаза состоит из одной обмотки, а не из двух в случае униполярной.В этом случае направление вращения регулируется путем изменения направления тока через обмотки. Следовательно, для реверсирования тока требуется сложная схема возбуждения.
2-фазный биполярный шаговый двигатель Тактовые режимы шагового двигателяТипичное шаговое действие заставляет двигатель шагать через последовательность положений равновесия в ответ на подаваемые на него импульсы тока. Шаговое действие можно изменять по-разному, просто изменяя последовательность подачи питания на обмотки статора.Ниже приведены наиболее распространенные режимы работы или движения шаговых двигателей.
- Шаг волны
- Полный шаг
- Полушаг
- Микрошаг
Режим шага волны самый простой из всех других режимов, в которых только одна обмотка находится под напряжением в любой момент времени. Каждая катушка фазы поочередно подключается к источнику питания. В таблице ниже показан порядок включения катушек в 4-фазном шаговом двигателе.
В этом режиме двигатель дает максимальный угол шага по сравнению со всеми другими режимами. Это самый простой и наиболее часто используемый режим для пошагового выполнения; однако создаваемый крутящий момент меньше, поскольку в данный момент используется некоторая часть всей обмотки.
Режим полного шага
В этом приводе или режиме две фазы статора запитываются одновременно в любой момент времени. Когда две фазы запитаны вместе, ротор будет испытывать крутящий момент от обеих фаз и придет в положение равновесия, которое будет чередоваться между двумя соседними положениями ступенек волны или однофазным возбуждением.Таким образом, этот шаг обеспечивает лучший удерживающий момент, чем волновой шаг. В таблице ниже показан полный шаговый привод для 4-фазного шагового двигателя.
Полушаговый режим
Это комбинация волнового и полушагового режимов. При этом однофазное и двухфазное возбуждение выполняются поочередно, то есть однофазное включение, двухфазное включение и так далее. Угол шага в этом режиме становится половиной полного угла шага. Этот режим привода имеет самый высокий крутящий момент и стабильность по сравнению со всеми другими режимами.Таблица, содержащая последовательность импульсов фазы для 4-фазного двигателя с полушагом, приведена ниже.
Режим микрошагаВ этом режиме каждый шаг двигателя разделен на несколько небольших шагов, даже на сотни фиксированных положений, поэтому достигается большее разрешение позиционирования. При этом токи через обмотки постоянно меняются, чтобы получить очень маленькие шаги. При этом одновременно возбуждаются две фазы, но с разными токами в каждой фазе.
Например, ток через фазу -1 поддерживается постоянным, в то время как ток через фазу 2 увеличивается пошагово до максимального значения тока, будь то отрицательное или положительное. Затем ток в фазе 1 постепенно уменьшается или увеличивается до нуля. Таким образом, двигатель будет производить шаг небольшого размера.
Все эти пошаговые режимы могут быть получены с помощью каждого типа шагового двигателя, описанного выше. Однако направление тока в каждой обмотке во время этих этапов может быть изменено в зависимости от типа двигателя, будь то однополярный или биполярный.
Преимущества шагового двигателя- В состоянии покоя двигатель развивает полный крутящий момент. Неважно, нет ли момента или смены позиции.
- Обладает хорошей реакцией на пуск, остановку и движение задним ходом.
- Поскольку в шаговом двигателе нет контактных щеток, он надежен, а срок службы зависит от подшипников двигателя.
- Угол поворота двигателя прямо пропорционален входным сигналам.
- Это просто и менее затратно в управлении, поскольку двигатель обеспечивает управление без обратной связи при ответе на цифровые входные сигналы.
- Скорость двигателя прямо пропорциональна частоте входных импульсов, таким образом можно достичь широкого диапазона скорости вращения.
- Когда нагрузка приложена к валу, все еще возможно реализовать синхронное вращение с низкой скоростью.
- Точное позиционирование и повторяемость движения хороши, так как имеет точность шага 3-5%, где ошибка не суммируется от одного шага к другому.
- Шаговые двигатели более безопасны и дешевы (по сравнению с серводвигателями), имеют высокий крутящий момент на низких скоростях, высокую надежность и простую конструкцию, которые работают в любых условиях.
- Шаговые двигатели с низким КПД.
- Имеет низкую точность.
- Его крутящий момент очень быстро снижается со скоростью.
- Поскольку шаговый двигатель работает в режиме управления без обратной связи, нет обратной связи, указывающей на возможные пропущенные шаги.
- Он имеет низкое отношение крутящего момента к моменту инерции, что означает, что он не может очень быстро разгонять груз.
- Они шумные.
- Шаговые двигатели используются в автоматизированном производственном оборудовании, автомобильных манометрах и промышленных машинах, таких как упаковка, этикетирование, наполнение и резка и т. Д.
- Он широко используется в устройствах безопасности, таких как камеры безопасности и наблюдения.
- В медицинской промышленности шаговые двигатели широко используются в образцах, цифровой стоматологической фотографии, респираторах, жидкостных насосах, оборудовании для анализа крови, медицинских сканерах и т. Д.
- Они используются в бытовой электронике в сканерах изображений, копировальных аппаратах и печатных машинах, а также в других отраслях промышленности. цифровая камера для автоматического масштабирования и фокусировки с функциями и положениями.
- Шаговые двигатели также используются в лифтах, конвейерных лентах и переключателях полосы движения.
Вы также можете прочитать:
Что такое шаговый двигатель
Это тип двигателя, который используется для точных перемещений и позиционирования объектов в основном на фрезерных станках. Это синхронный двигатель бесщеточного типа с ступенчатым управлением. Это пошаговое вращение считается углом шага. Угол одного шага — это поворот вала за один шаг. Угол шага может быть разным в зависимости от конструкции зубьев ротора и статора. Бесщеточный двигатель вращает вал на 360 градусов за один оборот, тогда как шаговый двигатель вращается в зависимости от заданного угла шага.Например, шаг двигателя составляет 7,5 градусов, а если его нужно повернуть на 225 градусов, потребуется 30 шагов. Точно так же шаговый двигатель требует 12, 24, 72 и т. Д. Шагов для вращения ротора. Он очень точный, так что он может точно позиционировать объекты в желаемом месте.
Конструкция шагового двигателя
Сердечник состоит из стальных пластин, расположенных вместе. Он состоит из статора и ротора, статор является неподвижной частью, а ротор — вращающейся частью.Полюса ротора и статора в шаговом двигателе не равны. Основа двигателя этого типа показана на рисунке ниже.
Сердечник двигателя
Полюса ротора меньше полюсов статора. Если у статора 6 полюсов, то у ротора 4 полюса. Вся вращающаяся часть находится внутри сердечника. На статор намотаны обмотки, классифицированные как A, B и C. Катушки будут запитываться в соответствии с требованиями. Вал, прикрепленный к ротору, может вращаться, когда катушки находятся под напряжением.Схема шагового двигателя представлена на рисунке ниже.
Конструкция
Принцип работы шагового двигателя
Он также работает по принципу электромагнитной индукции Фарадея I. ЭДС индуцируется из-за проводников в магнитном поле. Поскольку двигатель оснащен 6 отдельными зубьями статора, они могут быть запитаны с помощью трех отдельных источников постоянного тока, а именно A, B и C. Эти катушки запитываются одновременно для вращения ротора. Когда катушка A находится под напряжением, катушка намагничивается и тянет ротор по часовой стрелке.Когда катушка B находится под напряжением, катушка A обесточивается, и ротор немного вращается.
Кажется, что ротор повернут на угол 30 градусов. Это вращение называется размером шага. И когда катушка C находится под напряжением, катушка B обесточивается и ротор вращается на угол 30 градусов. Это продолжается одновременно с включением катушек. Этот угловой поворот ротора называется углом шага. Поворот шагового двигателя на 30 градусов показан на рисунке ниже.
Рабочий
Однако размер шага можно дополнительно уменьшить до 15 градусов, запитав катушки A и B вместе. Когда катушки A и B запитаны вместе, ротор вращается на угол 15 градусов. После вращения катушка A обесточивается, а катушка C и катушка A включаются вместе, и ротор поворачивается еще на 15 градусов. Таким образом, вращение продолжается по мере одновременного включения двух катушек поочередно. Это 15-градусное шаговое вращение называется полушаговым. На следующем рисунке показано одновременное включение двух катушек вместе.
Рабочие
Типы шаговых двигателей
- Тип переменной и
- Гибридный тип
Преимущества
- Низкая стоимость
- Постоянный крутящий момент нагрузки
- Детали обеспечивают более длительный срок службы
- Точность
- Точное управление движением
- Работает с системой разомкнутого контура
- Высокая читаемость
- Потери при перегрузке меньше
- Нет проблем с остановкой
- Шаги могут быть подсчитаны в цифровом виде контроллерами
- Не требуются какие-либо датчики (Чтобы узнать положение вала, мы можем подсчитайте количество импульсов)
Недостатки
- Меньшая эффективность
- Уменьшение крутящего момента
- Шаговые двигатели имеют меньшую точность по сравнению с серводвигателями
- Отсутствие обратной связи становится недостатком при неточной работе
Приложения
- Они используются в основном в фрезерных станках, цифровых кулачках. eras, печатные машины, медицинские сканеры, плоттеры, 3D-принтеры, компьютерные принтеры и приводы компакт-дисков.
Итак, это все о шаговом двигателе, конструкции, принципе работы, преимуществах, недостатках и применении. Вот вам вопрос, какие бывают типы шаговых двигателей?
Шаговый двигатель: работа, конструкция, виды и способы привода
Шаговые двигателипроизвели революцию в машиностроении в современном мире. Эти двигатели в основном используются в 3D-принтерах, станках с ЧПУ, робототехнике и т. Д. Шаговый двигатель — это не что иное, как двигатель постоянного тока, который движется ступенчато, и каждый шаг можно контролировать с точностью.Поэтому шаговые двигатели обладают высокой точностью по сравнению с другими двигателями, а также имеют высокий крутящий момент, который может выдерживать большие нагрузки, что делает их идеальным выбором для машин. Кроме того, эти двигатели не имеют какого-либо механизма обратной связи, как серводвигатели, и работают в режиме разомкнутого контура.
КОНСТРУКЦИЯ ШАГОВОГО ДВИГАТЕЛЯ:
Шаговый двигатель по конструкции очень похож на двигатель постоянного тока. Он также имеет постоянный магнит в качестве ротора. Ротор будет в центре и будет вращаться, когда на него будет действовать сила.Этот ротор окружен рядом статоров, намотанных на него магнитной катушкой. Статор будет размещен как можно ближе к ротору, чтобы магнитные поля в статорах могли влиять на движение ротора. Для управления шаговым двигателем каждый статор будет поочередно запитываться. В этом случае статор будет намагничиваться и действовать как электромагнитный полюс, оказывая отталкивающую силу на ротор и подталкивая его к перемещению на один шаг. Альтернативное намагничивание и размагничивание статоров будет перемещать ротор шаг за шагом и позволяет ему вращаться с большим контролем.
По статору его можно разделить на два типа. Это униполярные и биполярные шаговые двигатели.
УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ:
В униполярном двигателе каждая обмотка статора имеет центральный отвод, который подключается к Vcc или заземлению. В этой установке ток течет только к половине обмотки за раз. В зависимости от того, что подключено к Vcc или GND, ток либо течет в центральную клемму ответвления, либо выходит из нее. Когда ток проходит через обмотку, статор действует как магнитные полюса.Здесь пропускание тока через одну половину обмотки сделает статор северным полюсом, а ток через другую половину вызовет южный полюс. Это упрощает управление двигателем и его работу как по часовой, так и против часовой стрелки. Простого транзистора на обоих концах обмотки будет достаточно для работы этого типа шагового двигателя в обоих направлениях.
Несмотря на преимущества, униполярный двигатель имеет меньший крутящий момент и не выдерживает больших нагрузок. Кроме того, поскольку одновременно будет активна только половина обмотки катушки, обмотка статора будет больше, что приведет к увеличению сопротивления катушки.
БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ:
В отличие от униполярных двигателей, обмотка статора биполярных двигателей не имеет центрального отвода, поэтому ток будет проходить через всю катушку. Вы можете протолкнуть ток через катушку, подав напряжение Vcc на одну клемму и подключив другую клемму к земле. Ток в одном направлении сделает северный полюс статора, в то время как ток в противоположном направлении сделает его южным полюсом. В отличие от униполярных двигателей, для биполярных двигателей требуются специальные устройства, такие как H-мост, для работы в обоих направлениях.Биполярные двигатели обладают высоким крутящим моментом и могут выдерживать большие нагрузки. Но для управления этим двигателем требуются специальные схемы, которые могут увеличить стоимость.
Шаговые двигателиможно разделить на разные типы в зависимости от конструкции. Мы увидим это позже в этом руководстве для лучшего понимания.
ПРИВОД ШАГОВОГО ДВИГАТЕЛЯ:
Изображение предоставлено: www.wikipedia.org
Для шаговых двигателейтребуются специальные схемы из-за их сложной конструкции.Есть много способов управлять шаговым двигателем. В этом уроке мы рассмотрим наиболее распространенные способы управления двигателями. Для пояснения мы рассмотрим четырехфазный шаговый двигатель.
РЕЖИМ ОДИНОЧНОГО ВОЗБУЖДЕНИЯ:
Это самый простой способ управления шаговым двигателем, и он мало используется, но все же стоит знать, чтобы понять принцип работы шагового двигателя. В этом методе каждая фаза или статор, расположенные рядом друг с другом, будут активироваться одна за другой поочередно с использованием специальной схемы.Это намагничивает и размагничивает статор, что приводит к пошаговому движению ротора.
ПОЛНЫЙ ШАГОВЫЙ ПРИВОД:
В этом методе вместо активации статоров по одному активируются два статора с коротким промежутком времени между ними. В этом режиме будут активны любые два статора. Это означает, что первый статор включается, а второй статор будет включен через короткий промежуток времени, в то время как первый статор все еще включен. Этот метод приводит к высокому крутящему моменту и позволяет двигателю управлять высокой нагрузкой.
ПОЛУШАГОВОЙ ПРИВОД:
Этот метод очень похож на Полный шаговый привод. Здесь два статора, размещенные рядом друг с другом, будут активированы первыми, а третий статор будет активирован следующим; эти два статора деактивируются. Этот цикл активации сначала двух статоров, а затем одного статора повторяется для приведения в действие шагового двигателя. Этот метод приводит к увеличению разрешающей способности двигателя при уменьшении крутящего момента.
МИКРОШАГ:
Изображение предоставлено: www.wikipedia.org
Это наиболее часто используемый метод вождения из-за его точности. Схема драйвера подает переменный ступенчатый ток на катушки статора в форме синусоидального сигнала. Эти крошечные ступенчатые токи плавно повышают точность каждого шага. Этот метод широко используется, поскольку обеспечивает высокую точность и в значительной степени снижает рабочий шум.
ВИДОВ СТРОИТЕЛЬНЫХ ДВИГАТЕЛЕЙ:
Существуют разные типы шаговых двигателей, которые различаются по сложности конструкции и работы.В этом уроке мы увидим некоторые из основных типов и их конструкцию.
ПОСТОЯННЫЙ МАГНИТ ШАГОВЫЙ ДВИГАТЕЛЬ:
В этом двигателе постоянный магнит используется в качестве ротора и электромагнитных статоров вокруг него. Это двигатель, который мы видели в примерах выше. Здесь статор будет намагничен и размагничен для перемещения ротора и приведения двигателя во вращение.
ШАГОВЫЙ ДВИГАТЕЛЬ С ПЕРЕМЕННОЙ РЕГУЛЯТОРОМ:
Этот двигатель построен с использованием ферромагнитного ротора и электромагнитного статора с обмоткой катушки для их намагничивания.Здесь у ротора будет несколько выступов, также называемых зубьями, которые будут действовать как магнитные полюса. Этот шаговый двигатель работает на основе магнитного сопротивления, поэтому и получил свое название. Когда ток проходит через полюс статора, он намагничивает и притягивает выступающие полюса ротора таким образом, чтобы расстояние между ними было минимальным и полностью совмещенным. Схема привода будет продолжать намагничивать статоры, приводя ротор во вращение.
ГИБРИДНЫЙ СИНХРОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ:
Изображение предоставлено: www.wikiforu.com
Это комбинация двух вышеперечисленных двигателей шагового двигателя с постоянным и переменным сопротивлением. Этот двигатель состоит из зубчатого ротора с постоянными магнитами, как и в шаговых двигателях с постоянными магнитами, с набором северных и южных полюсов. Также, как и в регулируемом реактивном двигателе, у статоров есть зубцы. Некоторые зубья статора будут совмещены с зубьями ротора, в то время как другие не будут совмещены друг с другом. Когда статор намагничивается путем подачи на него тока, магнитный поток заставляет ротор двигаться на один шаг.Наличие зубцов как в статоре, так и в роторе изменяет магнитный поток и приводит двигатель в действие ступенчато, как задумано.
Гибридный синхронный двигатель наиболее популярен благодаря высокому крутящему моменту и разрешающей способности. Такие режимы вождения, как полушаг, могут даже увеличить разрешающую способность этого мотора. В то время как полный шаг или микрошаг можно использовать для увеличения крутящего момента, точности и плавности работы. Гибридный двигатель является наиболее популярным из-за преимуществ, которые он имеет, но имеет высокую стоимость из-за своей сложной конструкции.
ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ:
Это некоторые из важных характеристик, которые нужно искать в шаговом двигателе.
- Разрешение
- Угол поворота
- Рабочее напряжение
- Крутящий момент
- Скорость
Здесь вы можете найти более подробное объяснение важных характеристик шагового двигателя.
ПРИМЕНЕНИЕ ШАГОВОГО ДВИГАТЕЛЯ:
- Принтеры
- Станки с ЧПУ
- 3D принтеры
- Лазер и оптика
- Промышленное оборудование
Надеюсь, это руководство дало вам отличное понимание того, что такое шаговый двигатель, его конструкция, работа и типы.Ознакомьтесь с другими электронными учебниками на нашем веб-сайте.