
Асинхронный двигатель с фазным ротором
Фазный ротор
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи. Этим асинхронный двигатель с фазным ротором выгодно отличается от АД с короткозамкнутым ротором.
Статор (3) выполнен, так же как и в обычном асинхронном двигателе, он представляет из себя полый цилиндр, набранный из листов электротехнической стали, в который уложена трехфазная обмотка.
Ротор (4) по сравнению с короткозамкнутым, представляет из себя более сложную конструкцию. Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120.
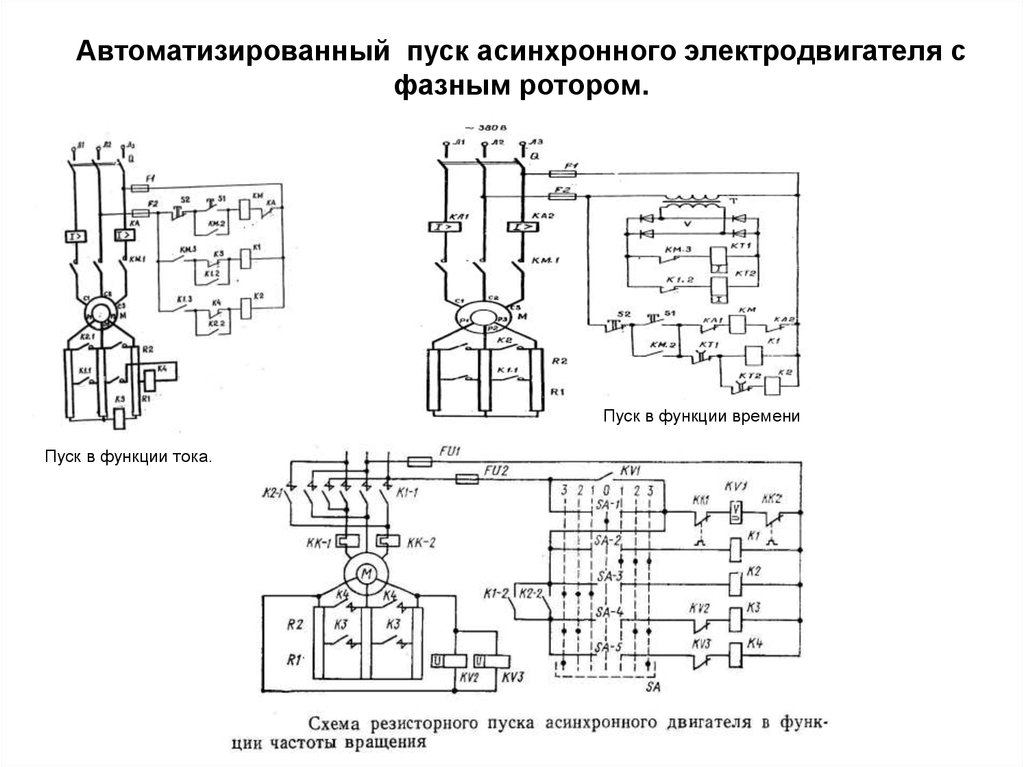
Добавочное сопротивление вводится только при пуске двигателя. Причем им обычно служит ступенчатый реостат, сопротивление которого уменьшают с увеличением оборотов двигателя. Таким образом пуск двигателя осуществляется тоже ступенчато. После того, как разгон закончился и двигатель вышел на естественную механическую характеристику, обмотку ротора закорачивают. Для того, чтобы сохранить щетки и снизить потери на них, в двигателях с фазным ротором существует специальное устройство, которое поднимает щетки и замыкает кольца. Таким образом, удается повысить еще и КПД двигателя.
Добавочное сопротивление позволяет главным образом осуществить пуск двигателя под нагрузкой, работать с ним длительное время двигатель не может, так как механические характеристики слишком мягкие и работа двигателя на них нестабильна.
Для того чтобы автоматизировать пуск двигателя, в обмотку ротора включают индуктивность. В момент пуска, частота тока в роторе наибольшая, а значит и индуктивное сопротивление максимально. Затем, при разгоне двигателя, частота, как и сопротивление уменьшаются, и двигатель постепенно начинает работать в обычном режиме.
За счет усложнения своей конструкции, асинхронный двигатель с фазным ротором, обладает хорошими пусковыми и регулировочными характеристиками. Но по той же причине, его стоимость возрастает приблизительно в 1.5 по сравнению с обычным АД, кроме того увеличивается масса, размеры и как правило, уменьшается надежность двигателя.
принцип работы, устройство и сферы применения асинхронного двигателя
 От классических моделей с короткозамкнутым ротором агрегат отличается более высоким пусковым моментом и низким пусковым током. Классификация устройств осуществляется с учетом их свойств и конструкции.
От классических моделей с короткозамкнутым ротором агрегат отличается более высоким пусковым моментом и низким пусковым током. Классификация устройств осуществляется с учетом их свойств и конструкции.- Общая информация
- Технические характеристики
- Устройство и конструкция
- Принцип работы
- Плюсы и минусы
- Сферы применения
Общая информация
Чтобы понять, как работает асинхронный двигатель с фазным ротором, необходимо внимательно изучить особенности его пуска. При запуске установки ее ротор параллельно переходит из состояния покоя в медленное и равномерное вращение. При этом система уравновешивает момент сил сопротивления посредством собственного вала.
Во время запуска начинается усиленное потребление энергетических ресурсов, что связано с преодолением тормозного момента и компенсацией потерь внутри силовой установки. Нередко параметры начального пускового момента далеки от требуемых, поэтому асинхронный двигатель не способен перейти в режим полноценной работы.
По этой причине частота запусков двигателя ограничивается несколькими включениями. Если агрегат работал от электрической сети с низкой мощностью, тогда подобное явление может снизить общее напряжение и нарушить работу других приборов, присоединенных к этой линии.
Наличие в роторной цепи пусковых резисторов снижает показатели электрического тока, но при этом поднимает начальный пусковой момент, пока он не достигнет пиковой отметки. Запуск силовой установки бывает легким, нормальным или тяжелым.
В зависимости от этого фактора можно определить оптимальные параметры сопротивления резисторов.
После успешного запуска остается поддерживать стабильный вращающий момент на этапе разгона ротора, что сократит продолжительность перехода из спокойного состояния в стадию вращения и снизит вероятность нагрева.
Для этого необходимо уменьшить показатели сопротивления резисторов.
 Для этого необходимо уменьшить показатели сопротивления резисторов.
Для этого необходимо уменьшить показатели сопротивления резисторов.Переключение разных резисторов происходит из-за подключения контакторов ускорения в последовательном порядке. Отключать двигатель от электрической сети можно только при накоротко замкнутой роторной цепи. Если это требование проигнорировать, то появится риск существенного перенапряжения в обмоточных фазах статора.
Технические характеристики
Существуют установленные требования, гарантирующие качественную работу асинхронных двигателей с фазным ротором. От них зависят базовые параметры и характеристики системы, включая:
- Размеры и мощность установки, соответствующие техническому регламенту.
- Защиту от внешних воздействий. Ее степень определяется окружающими условиями, в которых будет расположена машина. Дело в том, что одни установки предназначаются для работы внутри помещения, в то время как другие способны функционировать и на улице.
- Степень изоляции. Асинхронные двигатели с фазным ротором должны быть устойчивыми к высоким температурным показателям и возможным нагревам внутренних механизмов. Для предотвращения воспламенений их защищают специальными изоляционными слоями.
- Соответствие установленным стандартам и режимам функционирования.
- Наличие мощной охладительной системы, которая соответствует рабочему режиму двигателя.
- Уровень шума во время запуска на холостом ходу. Он соответствует второму классу или ниже.

Устройство и конструкция
Желая купить асинхронный электродвигатель с фазным ротором, необходимо хорошо разбираться в его устройстве и конструкционных особенностях.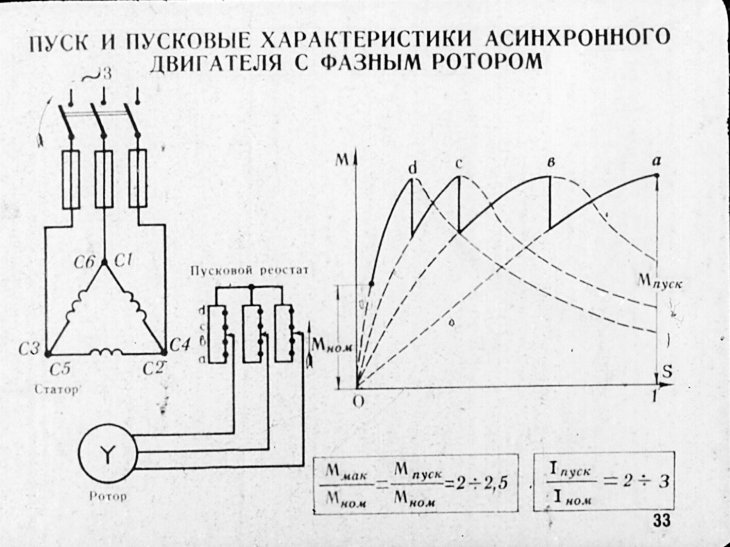 В первую очередь нужно знать, что к основным частям установки относятся статор, который является неподвижным, и ротор — вращающийся механизм внутри статора. Между обоими элементами расположен воздушный зазор, а их поверхность покрыта специальной обмоткой.
В первую очередь нужно знать, что к основным частям установки относятся статор, который является неподвижным, и ротор — вращающийся механизм внутри статора. Между обоими элементами расположен воздушный зазор, а их поверхность покрыта специальной обмоткой.
Обмотка статора подключена к электрической сети с переменным напряжением, которое передается на обмотку ротора. Взаимодействие узлов обусловлено магнитным потоком.
Что касается корпуса статора, то в качестве него используется корпус двигателя, внутри которого расположен запрессованный сердечник. В последнем находятся проводники обмотки, защищенные от замыкания изоляцией. Обмотка сердечника состоит из нескольких секций, заключенных в катушки.
В роторе установлены вал и сердечник из набранных пластин. Последний элемент создается на основе высокотехнологичной стали и обладает симметричными пазами с проводниками. При работе вал ротора передает крутящий момент к приводу установки. В зависимости от типа ротора
- С короткозамкнутым ротором.
- С фазным ротором.
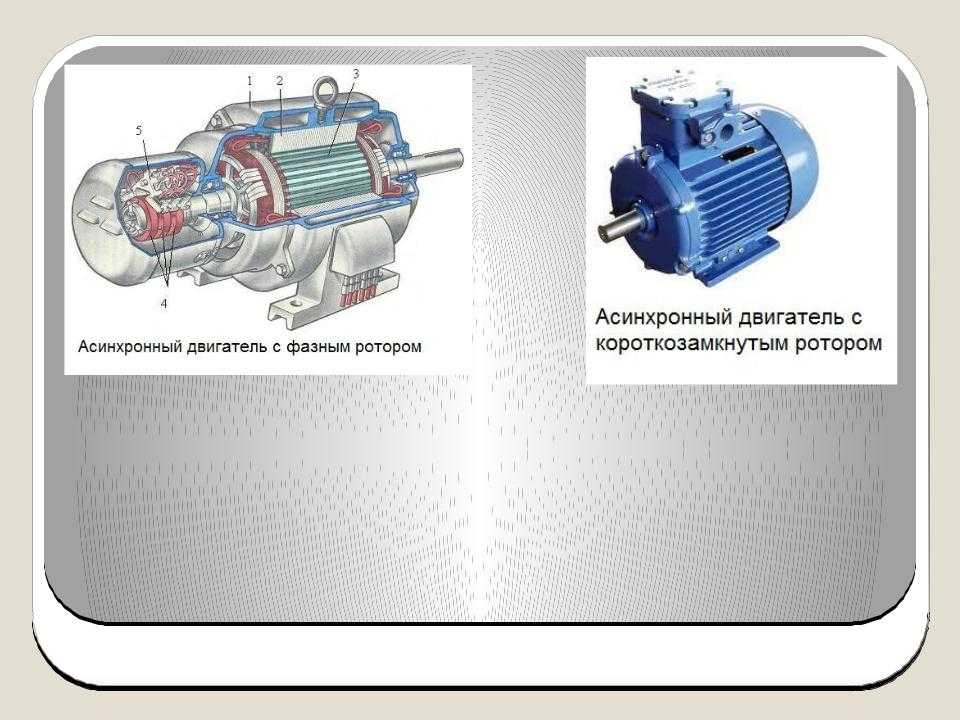
В первом типе роторов присутствуют алюминиевые стержни, которые находятся внутри сердечника и замкнуты на торцах кольцами. Их также называют «беличьим колесом». Обычно пазы установки обрабатываются алюминием, что повышает их прочность.
Фазный ротор асинхронного двигателя существенно отличается от предыдущей разновидности. Число катушек, установленных под конкретным углом, в таких моделях определяется количеством парных полюсов. При этом пары полюсов в роторе такого типа всегда сопоставимы с аналогичными статорными парами.
Принцип работы
Изучив устройство АД с фазным ротором и его запуск, можно приступать к более подробному рассмотрению работы такой установки. Её можно разделить на несколько пунктов:
- На статор с тройной обмоткой подается трехфазное напряжение от электрической сети с переменным током.
- Затем начинается образование магнитного поля, которое приводит к вращению ротора. По мере ускорения вращательных движений скорость оборотов ротора существенно растет.
- По достижении определенных показателей отдельные линии полей обоих узлов пересекаются, что вызывает появление электродвижущей силы. Она воздействует на роторную обмотку, за счет чего в ней формируется электрический ток.
- В определенный момент времени между магнитным полем статора и током в роторе начинается взаимодействие, образующее крутящий момент. Именно за счет него и осуществляется работа асинхронного двигателя.
 По мере ускорения вращательных движений скорость оборотов ротора существенно растет.
По мере ускорения вращательных движений скорость оборотов ротора существенно растет.Плюсы и минусы
В последнее время асинхронные агрегаты пользуются большой популярностью. Она связана с массой преимуществ, которыми они обладают. В их числе:
- Высокие значения при начальном вращающем моменте.
- Способность принимать любые механические перегрузки без существенного изменения КПД или нарушения стабильной работы установки. Даже если в системе возникают разнообразные перегрузки, агрегат продолжает функционировать с заданной скоростью и практически не отклоняется от базового режима.
- Сниженный пусковой ток. В отличие от других асинхронных моделей, например, с короткозамкнутым ротором, у этих двигателей сравнительно низкие показатели пускового тока.
- Возможность полной автоматизации работы.
- Простота конструкции.
- Простая схема запуска.
- Сравнительно невысокая цена.
- Отсутствие необходимости сложного и дорогостоящего обслуживания.

Кроме множества плюсов у двигателей этого типа имеются и недостатки. К ключевым минусам относят довольно крупные габариты, из-за которых монтаж и дальнейшая эксплуатация системы усложняются, а также сниженный КПД по сравнению со многими аналогами.
По последнему показателю устройства с короткозамкнутым ротором более продуктивные.
Сферы применения
В настоящее время многие промышленные двигатели являются асинхронными. Их популярность обусловлена вышеперечисленными плюсами и доступностью.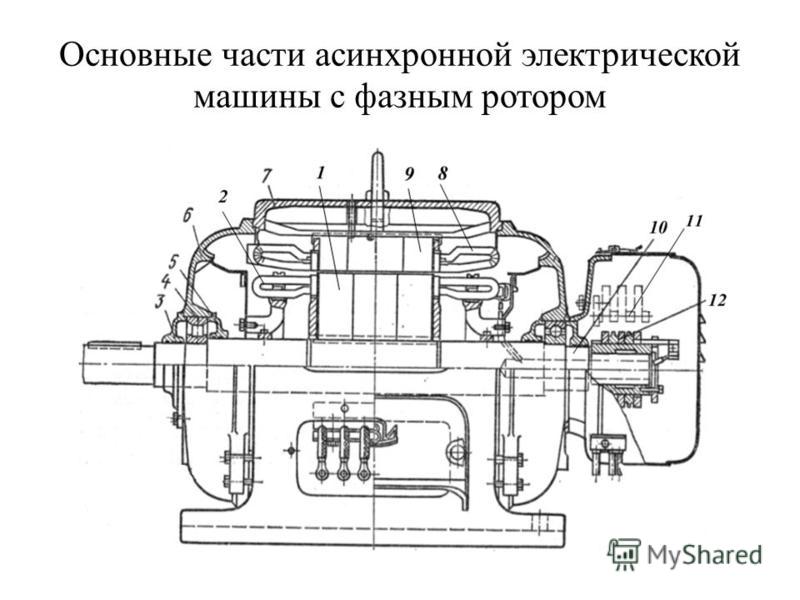 Сферы применения таких агрегатов очень обширные, поэтому их активно используют для работы автоматизированных устройств из телемеханической сферы, бытового и медицинского оборудования и звукозаписывающих установок. Асинхронный двигатель — это полезное изобретение нынешнего времени, которое упрощает жизнь человека и обеспечивает хороший КПД при минимальных затратах электроэнергии.
Сферы применения таких агрегатов очень обширные, поэтому их активно используют для работы автоматизированных устройств из телемеханической сферы, бытового и медицинского оборудования и звукозаписывающих установок. Асинхронный двигатель — это полезное изобретение нынешнего времени, которое упрощает жизнь человека и обеспечивает хороший КПД при минимальных затратах электроэнергии.
Принцип работы трехфазного асинхронного двигателя
Поиск
Когда трехфазные обмотки статора питаются от трехфазного источника питания, создается вращающееся магнитное поле. Это вращающееся магнитное поле, разрезая неподвижные проводники ротора, индуцирует ЭДС. в этих проводниках. Поскольку ротор представляет собой замкнутую цепь, в цепи ротора протекает ток, направление которого находится по правилу правой руки Флеминга. За счет этого тока ротора вокруг проводников ротора создается другое магнитное поле. Теперь при взаимодействии этих двух магнитных полей на эти проводники действует механическая сила, стремящаяся их вращать.
Синхронная скорость
Скорость вращения поля статора называется синхронной скоростью. Она определяется по формуле:
Ns = 120f
Где
Ns = синхронная скорость в об/мин.
F = Частота питания в циклах в секунду.
P = количество полюсов статора.
Скорость ротора
Фактическая механическая скорость ротора называется скоростью ротора. Она всегда меньше синхронной скорости поля статора. Обозначается буквой «N» и измеряется в об/мин.
Скорость скольжения и скольжение
Разница между синхронной скоростью и фактической скоростью ротора называется скоростью скольжения. Скольжение обозначается буквой «S».
Дробное скольжение S = (Ns – N) / Ns
Процентное скольжение S = (Ns – N) N x 100
Частота тока ротора
В состоянии покоя частота тока ротора равна частоте сети. Но когда ротор начинает вращаться, то частота тока ротора зависит от относительной скорости или скорости скольжения:
Пусть:
fr = частота тока ротора в циклах/сек.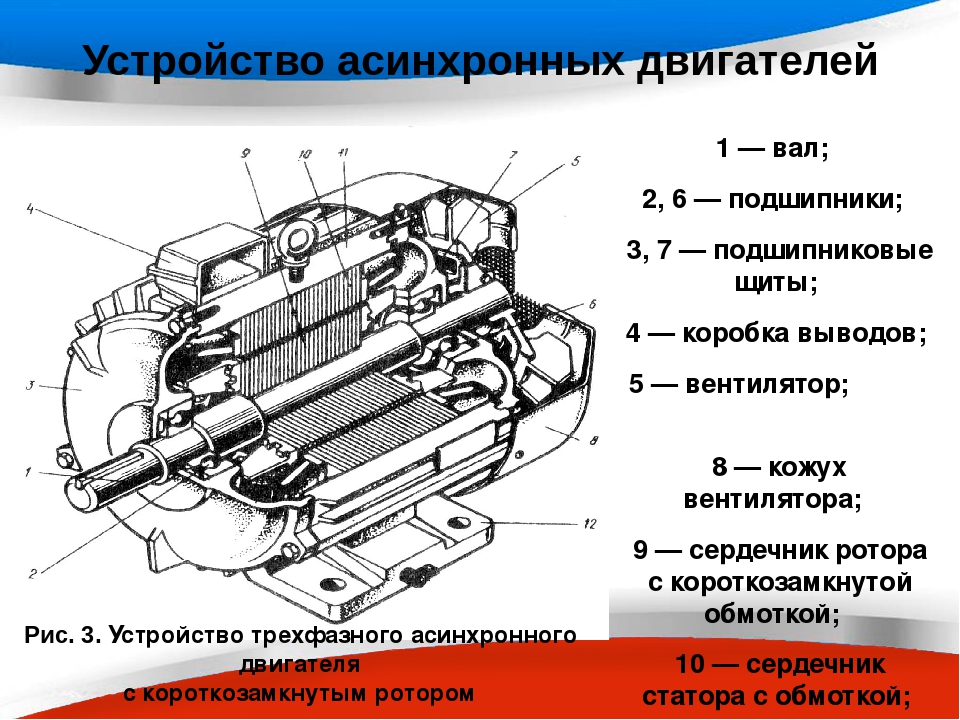
Скорость скольжения = 120fr / P
Ns — N = 120fr / P — (1)
А
S = (Ns — N ) / Ns
Или
Ns — N = S
Ns = S (120f/P) — (2)
Сравнивая уравнение (1) и (2), получаем:
S (120f / p) = 120fr / P
Или
fr = Sf
т.е. текущая частота равна скольжению, умноженному на частоту питания.
ПРИМЕР 1:
4-полюсный 3-фазный асинхронный двигатель работает от сети с частотой 50 Гц. Вычислите:
- скорость, с которой вращается магнитное поле статора;
- скорость ротора при скольжении 0,04.
- частота тока ротора при скольжении 0,03
- частота тока ротора в состоянии покоя.
РЕШЕНИЕ
(i) Поле статора вращается с синхронной скоростью:
Ns = 120f/P = (120×50)/4 = 1500 об/мин.
(ii) Скорость ротора:
S = (Ns-N)/Ns или N = Ns (1-S)
N = 1500 (1 — 0,04)
N = 1440 об/мин.
(iii) частота тока ротора, fr = Sf
fr = 0,03 x 50 = 1,5 цикла/сек.
(iv) в состоянии покоя, S = 1
fr= Sf = 1 x 50
fr= 50 циклов/сек.
ПРИМЕР 2:
4-полюсный 3-фазный асинхронный двигатель питается от источника электроэнергии с частотой 50 циклов/сек. Частота тока ротора 1,5 цикл/сек. Найдите скольжение и скорость ротора.
РЕШЕНИЕ
fr = Sf или S = fr/f = 1,5/50 = 0,03 или 3%
Ns = 120f/P = (120x 50)4 = 1500 об/мин.
N = Ns (I — S) = 1500 (1 — 0,03) = 1455 об/мин.
ПРИМЕР 3:
Если э.д.с. в роторе 8-полюсного асинхронного двигателя частота 1,5 Гц, а в статоре 50 Гц, с какой скоростью работает двигатель и каково скольжение.
РАСТВОР
fr = Sf
1,5 = S x 50
S = 0,03 или 3%
Ns = 120f/P = (120 x 50)8 = 750 об/мин.
Процент S = ((Ns – N)/750) x 100
3 = ((750-N)750) x100
N = 727,5 об/мин.
Категория
Базовая электроника
Принцип работы асинхронного двигателя
Принцип работы асинхронного двигателя На рис.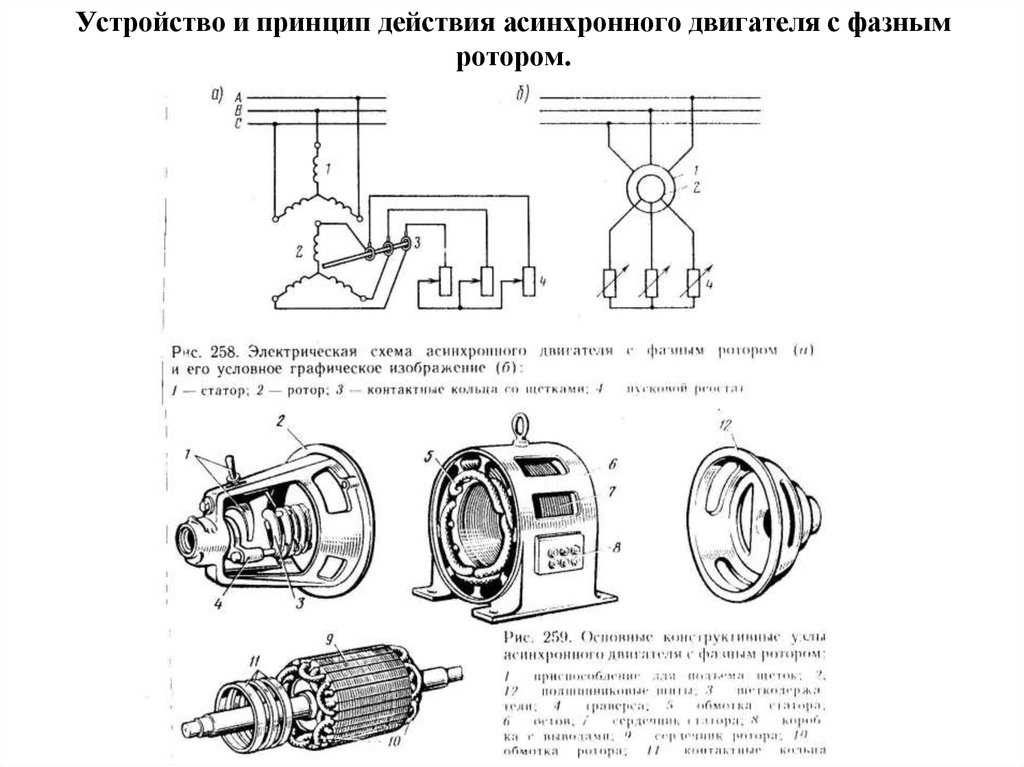 9.4 показано поперечное сечение асинхронного двигателя. Статор питается от трехфазной сети с напряжением В/фаза и частотой f Гц. Ротор намотан 3 фазами на такое же количество полюсов, как и статор, и имеет короткое замыкание. Предполагается, что сопротивление статора и реактивное сопротивление рассеяния пренебрежимо малы, так что
9.4 показано поперечное сечение асинхронного двигателя. Статор питается от трехфазной сети с напряжением В/фаза и частотой f Гц. Ротор намотан 3 фазами на такое же количество полюсов, как и статор, и имеет короткое замыкание. Предполагается, что сопротивление статора и реактивное сопротивление рассеяния пренебрежимо малы, так что
где
- E 1 = ЭДС статора/фаза
- k w1 = коэффициент обмотки статора
- N фаза 2 (серия) = серия витков статора/фаза
- Φ r = результирующий поток в воздушном зазоре/полюс
Это видно из уравнения. (9.1) что независимо от условий нагрузки, существующих на роторе, Φ r , поток / полюс, установленный в воздушном зазоре, является постоянным относительно приложенного напряжения с учетом сделанного предположения.
Вектор МДС F̅ r с соответствующим вектором плотности потока B̅ r , который отвечает за создание Φ r , вращается с синхронной скоростью, поскольку он связан с уравновешенными трехфазными токами, потребляемыми статором . Относительная скорость между B̅ r и ротором вызывает индукцию схемы тока в короткозамкнутом роторе. Крутящий момент, создаваемый взаимодействием B̅ r , и токи ротора по закону Ленца будут стремиться перемещать ротор в направлении вращения B̅ r для уменьшения относительной скорости. Таким образом, двигатель самозапускается , а ротор приобретает постоянную скорость n < n с в зависимости от нагрузки на валу. Можно отметить, что при n = n s крутящий момент не создается, поскольку относительная скорость между B̅ r и ротором равна нулю, и в роторе не индуцируются токи.
Относительная скорость между B̅ r и ротором вызывает индукцию схемы тока в короткозамкнутом роторе. Крутящий момент, создаваемый взаимодействием B̅ r , и токи ротора по закону Ленца будут стремиться перемещать ротор в направлении вращения B̅ r для уменьшения относительной скорости. Таким образом, двигатель самозапускается , а ротор приобретает постоянную скорость n < n с в зависимости от нагрузки на валу. Можно отметить, что при n = n s крутящий момент не создается, поскольку относительная скорость между B̅ r и ротором равна нулю, и в роторе не индуцируются токи.
На рис. 9.4 показано взаимное расположение векторов F̅ r , B̅ r (воздушный зазор mmf и плотность потока), F̅ 2 (ротор mmf), где F̅ r опережает F̅ 2 на угол δ = 90°+ θ 2 (двигательное действие), θ 2 — угол, на который ротор отстает.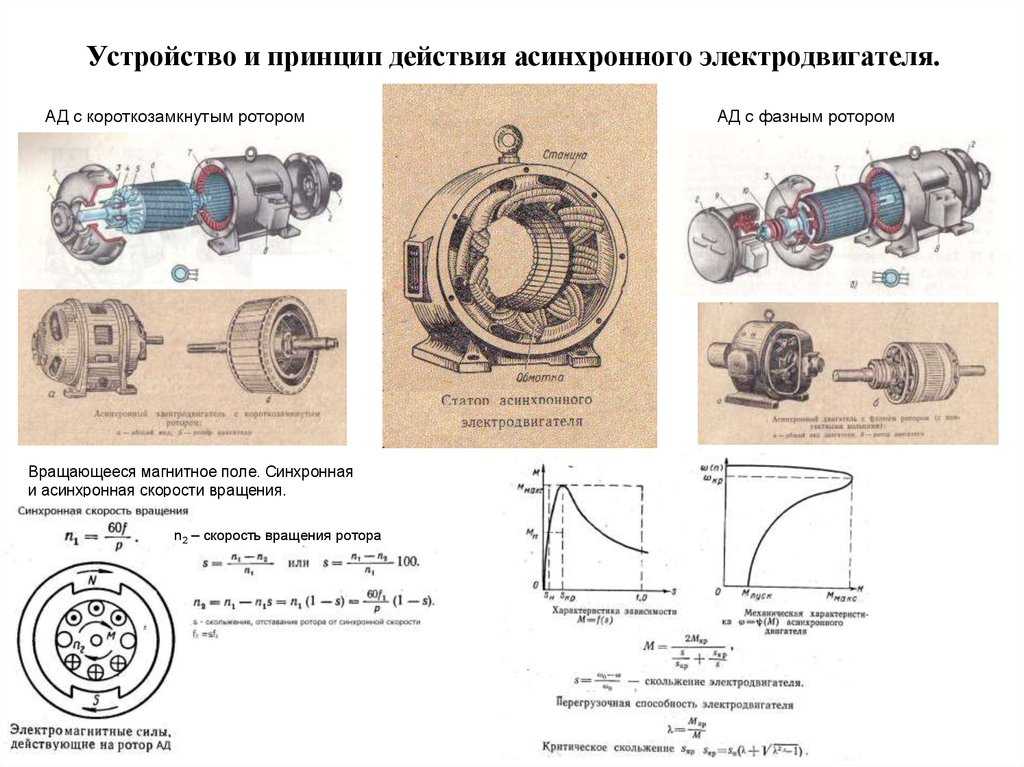 Однако угол θ 2 очень мал, так как реактивное сопротивление ротора намного меньше сопротивления ротора. Тогда вектор МДС статора задается как
Однако угол θ 2 очень мал, так как реактивное сопротивление ротора намного меньше сопротивления ротора. Тогда вектор МДС статора задается как
и расположен на векторной диаграмме. В момент, когда нарисована диаграмма, токи фазы a статора и ротора (показанной как одна катушка) максимальны. Читатель может проверить расположение векторов токов фазы а, применяя правило правой руки.
Скольжение и частота токов ротора:На рис. 9.4 легко заметить, что B̅ r движется со скоростью (n s – n) относительно проводников ротора (в направлении B̅ r ). Это известно как скорость скольжения . Скольжение определяется как
Очевидно, что s = 1 при n = 0, т. е. для неподвижного ротора, и s = 0 при n = n s , то есть для ротора, работающего на синхронной скорости.
Частота токов, индуцируемых в роторе, составляет
Нормальное скольжение при полной нагрузке Принципа работы асинхронного двигателя составляет порядка 2%-8%, так что частота токов ротора как можно ниже как 1-4 Гц.
Пофазная ЭДС ротора при s = 1 (неподвижный ротор) определяется как
При любом скольжении s, частота ротора равна sf, ЭДС ротора изменяется на sE 2 . Рассмотрим теперь импеданс цепи ротора
где
- X 2 = реактивное сопротивление рассеяния ротора в состоянии покоя (частота ротора = частота статора, f)
Когда ротор работает со скольжением s, его частота равна sf, его импеданс изменяется на
Таким образом, видно, что частота токов ротора, его ЭДС индукции и реактивное сопротивление изменяются прямо пропорционально скольжению. На рис. 9.5 показана схема ротора при скольжении s. Фазовый угол цепи
МДС ротора и производство крутящего момента: На рис. 9.4, поскольку результирующий вектор плотности потока B̅ r вращается со скоростью (n s — n) относительно ротора, максимальная положительная ЭДС индуцируется в роторе катушка aa’ (обозначена точкой на проводнике a и крестиком на проводнике a’), когда B̅ r находится на 90° впереди оси катушки. Поскольку ток в роторе отстает от ЭДС на θ 2 , ток в катушке aa’ будет максимальным положительным, когда B̅ r продвинулся вперед на угол θ 2 . Именно в этот момент времени вектор МДС ротора F̅ 2 будет лежать вдоль оси катушки aa’. Таким образом, видно, что B̅ r (или F̅ r ) лежит под углом δ = (90 + θ 2 ) впереди F̅ 2 . Далее, F̅ 2 , вызванная токами ротора частоты f 2 = sf, вращается относительно проводника ротора со скоростью (n s — n) и со скоростью n с . относительно статора, так как сам ротор движется в том же направлении со скоростью n относительно статора. Таким образом, F̅ r и F̅ 2 движутся с синхронной скоростью n с относительно статора и неподвижны относительно друг друга, причем F̅ r лежит впереди F̅ 2 на угол (90° + θ 2 ). Взаимодействие поля ротора и результирующего поля создает крутящий момент в направлении вращения F̅ r .
Поскольку ток в роторе отстает от ЭДС на θ 2 , ток в катушке aa’ будет максимальным положительным, когда B̅ r продвинулся вперед на угол θ 2 . Именно в этот момент времени вектор МДС ротора F̅ 2 будет лежать вдоль оси катушки aa’. Таким образом, видно, что B̅ r (или F̅ r ) лежит под углом δ = (90 + θ 2 ) впереди F̅ 2 . Далее, F̅ 2 , вызванная токами ротора частоты f 2 = sf, вращается относительно проводника ротора со скоростью (n s — n) и со скоростью n с . относительно статора, так как сам ротор движется в том же направлении со скоростью n относительно статора. Таким образом, F̅ r и F̅ 2 движутся с синхронной скоростью n с относительно статора и неподвижны относительно друг друга, причем F̅ r лежит впереди F̅ 2 на угол (90° + θ 2 ). Взаимодействие поля ротора и результирующего поля создает крутящий момент в направлении вращения F̅ r .
Рассмотрим теперь случай короткозамкнутого ротора с проводниками, равномерно распределенными по периферии ротора. Реакция ротора mmf F 2 лучше видна из развернутой схемы рис. 9.6, где ротор предполагается неподвижным, а B r – волна, движущаяся относительно него со скоростью скольжения (n s — n ). Пусть реактивное сопротивление ротора считается пренебрежимо малым, так что проводниковые (закороченные) токи совпадают по фазе с проводниковой ЭДС s. Таким образом, схема тока проводника имеет синусоидальное распределение и находится в пространственной фазе с B r — волна и движется синхронно с ней. МДС ротора представляет собой ступенчато-синусоидальную форму с тем же числом полюсов, что и синхронно движущаяся с ней волна B r . Его основная (F 2 ), показанная на рис. 9.6, отстает от волны B r на 90°. Если теперь принять во внимание реактивное сопротивление ротора, то волна тока проводника и, следовательно, МДС ротора будут отставать на угол θ 2 . Таким образом, угол между волной B r и волной F 2 будет (90° + θ 2 ), то же, что и в фазном роторе. Таким образом, короткозамкнутый ротор индуктивно реагирует так же, как ротор с обмоткой, за исключением того, что количество фаз неочевидно — можно считать, что у него столько же фаз, сколько стержней / полюсов. Ротор с короткозамкнутым ротором всегда можно заменить эквивалентным трехфазным ротором с обмоткой.
Таким образом, угол между волной B r и волной F 2 будет (90° + θ 2 ), то же, что и в фазном роторе. Таким образом, короткозамкнутый ротор индуктивно реагирует так же, как ротор с обмоткой, за исключением того, что количество фаз неочевидно — можно считать, что у него столько же фаз, сколько стержней / полюсов. Ротор с короткозамкнутым ротором всегда можно заменить эквивалентным трехфазным ротором с обмоткой.
Это видно из уравнения. (9.8) что ротор с низким реактивным сопротивлением (низкое θ 2 = tan -1 jsX 2 /R 2 ) будет генерировать больший крутящий момент для данного Φ р ,Ф 2 и с. В этом отношении двигатель с короткозамкнутым ротором превосходит двигатель с фазным ротором, поскольку ротор с короткозамкнутым ротором имеет меньшее реактивное сопротивление, поскольку у него нет выступа обмотки.
Одно очень важное наблюдение, которое можно сделать в разделе «Принцип работы асинхронного двигателя», заключается в том, что, хотя токи ротора имеют частоту sf, вызванная ими МДФ (F 2 ) протекает с синхронной скоростью по отношению к статору.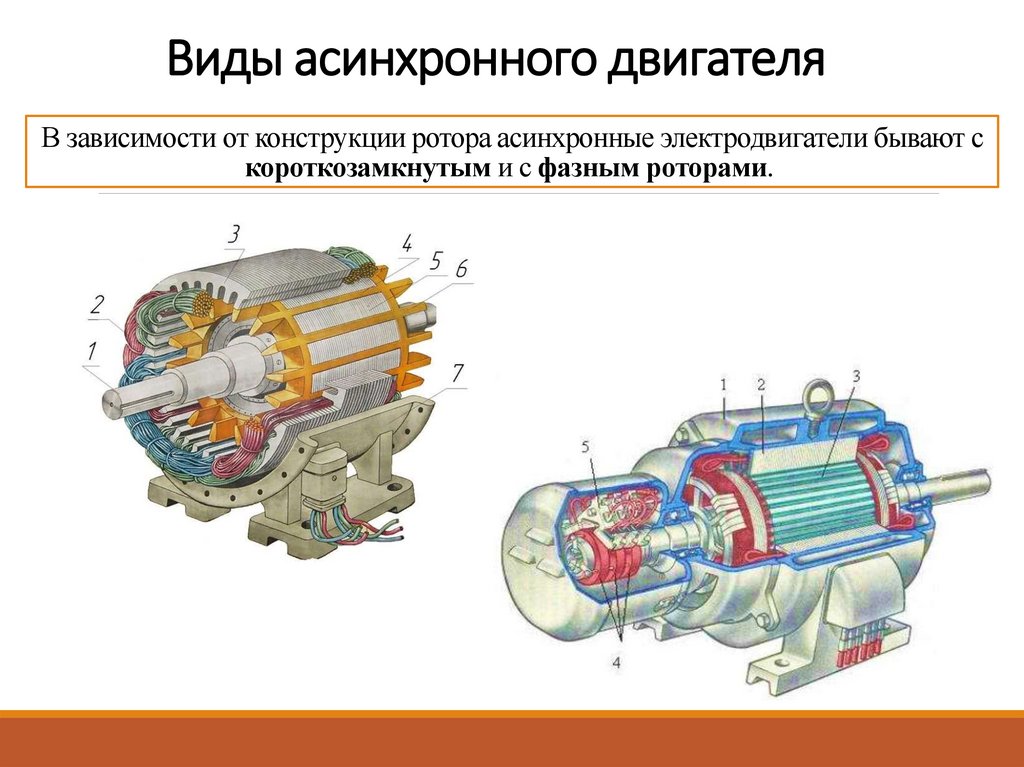 Другими словами, реакция токов ротора соответствует частоте статора (f) токов, протекающих по эквивалентной неподвижной цилиндрической конструкции, размещенной внутри статора вместо ротора. Или, другими словами, токи ротора, если смотреть со стороны статора, имеют частоту f, но имеют одно и то же среднеквадратичное значение.
Другими словами, реакция токов ротора соответствует частоте статора (f) токов, протекающих по эквивалентной неподвижной цилиндрической конструкции, размещенной внутри статора вместо ротора. Или, другими словами, токи ротора, если смотреть со стороны статора, имеют частоту f, но имеют одно и то же среднеквадратичное значение.
Вектор МДС статора F̅ 1 расположен на рис. 9.4 из векторного уравнения
Далее, F̅ 1 можно разбить на составляющие как
, где F4
, 2 и равны по величине и
Ток статора, вызывающий F̅ 1 , может, соответствующий векторному уравнению. (9.10), разделить на составляющие
Здесь I̅ м можно распознать как ток намагничивания файла, который вызывает результирующую МДС F r и результирующий поток/полюс, Φ r , тогда как I′ 2 является той составляющей тока статора, которая уравновешивает реакцию F 2 тока ротора I 2 .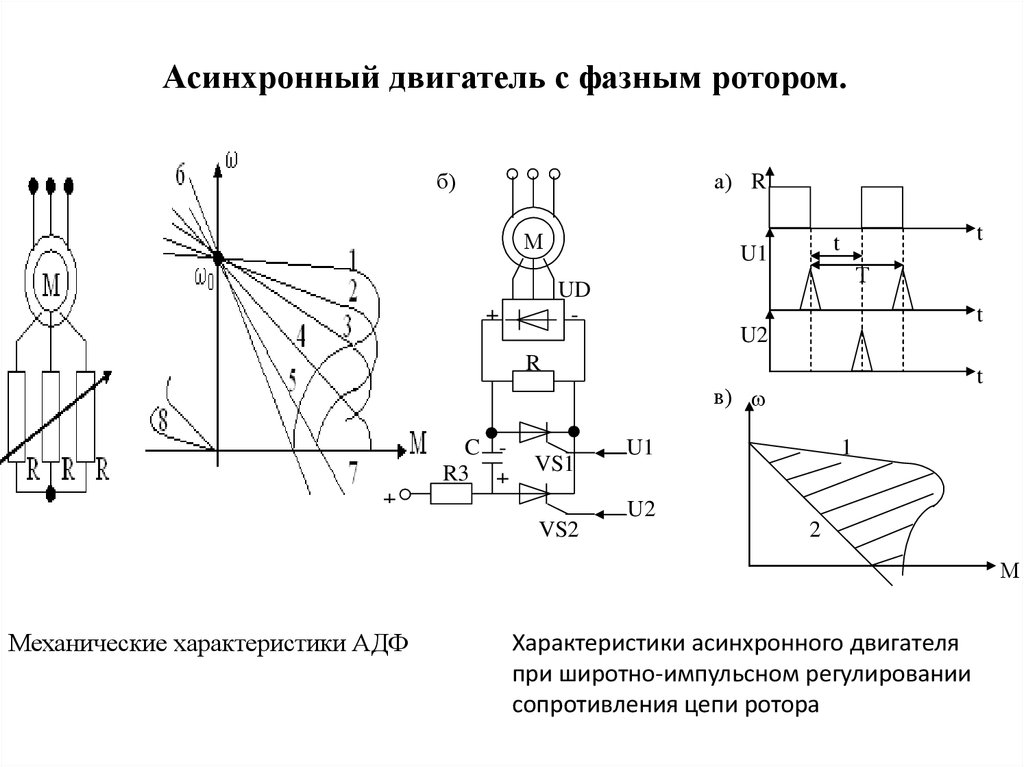
На рис. 9.4 также показано взаимное расположение катушки статора AA’ и положительное направление тока в ней. Это мгновенное векторное изображение сохраняется, когда I 2 имеет максимальное положительное значение. Чтобы F’ 2 отменил F 2 , составляющая тока статора, которая уравновешивает МДС ротора, должна быть в фазе с током ротора, если смотреть со стороны статора.
По величинам F′ 2 противоположно направлено F 2 , чтобы они сокращались, тогда как I′ 2 и I 2 должны подчиняться пропорциональности уравнения (9.13) и должны быть синфазны.
Далее, со ссылкой на рис. 9.4, легко увидеть, что в статоре положительное направление ЭДС E 1 противоположно положительному направлению I 1 , а в роторе положительное направление I 2 находится в положительном направлении SE 2 . Это аналогично корпусу трансформатора.
При направлении положительного тока в катушке статора AA’, отмеченном, как на рис.