
Квадратный электродвигатель с расщепленными полюсами YZF34-45
Маркировка
YZF34-45Расстояние между опорными ножками, мм __ — без ножекТолщина статора, ммВыходная мощность двигателя, ВтСерия двигателей с расщепленными полюсамиХарактеристики электродвигателя
| Тип двигателя | однофазный, 4 расщепленных полюса |
| Напряжение питания | 220…240В ~ 50Гц |
| Входная мощность | 110 Вт |
| Мощность на валу | 34 Вт |
| Номинальный ток | 0.85 А |
| Клас изоляции | B |
| Степень защиты | IP42 |
| Защита двигателя | термостат 135°C±5°C |
| Температура эксплуатации | -30°C…+50°C |
| Тип подшипника | подшипник скольжения |
| Установка | горизонтаьная |
| Срок службы | > 20 000 ч |
Размеры
Номенклатура электродвигателей серии YZF
| Модель | Напряжение питания, В 50Гц | Входная мощность, Вт | Выходная мощность, Вт | Ток, А | Скорость вращения, об/мин | Воздухопоток, м3/ч | Крыльчатка | Вес нетто, кг | Размеры, мм | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | D | |||||||||
| YZF5-13 | 220~240 | 29 | 5 | 0,2 | 1300 | 455 | Ø200/28° | 0,8 | 16,5 | 35,5 | 81 |
| YZF7-20 | 220~240 | 31 | 7 | 0,23 | 1300 | Ø230/28° | 1,1 | 16,5 | 35,5 | 87 | |
| YZF10-20 | 220~240 | 36 | 10 | 0,25 | 1300 | 650 | Ø230/28° | 1,1 | 16,5 | 35,5 | 87 |
| YZF16-25 | 220~240 | 60 | 16 | 0,45 | 1300 | 760 | Ø254/28° | 1,4 | 15,5 | 34,5 | 92 |
| YZF18-30 | 220~240 | 18 | 0,5 | 1300 | 1000 | Ø254/31° | 1,5 | 18 | 38 | 101 | |
| YZF25-40 | 220~240 | 90 | 25 | 0,7 | 1300 | 1030 | Ø300/25° | 1,8 | 19 | 39 | 112 |
| YZF34-45 | 220~240 | 110 | 34 | 0,85 | 1300 | 1210 | Ø300/28° | 2,0 | 23 | 121 | |
Размеры
Вспомогательные элементы и аксессуары для YZF34-45
300/28A
Аналогичные товары или товары на замену YZF34-45
Как определить параметры двигателя без шильдика?
Для замены или ремонта вышедшего из строя электродвигателя необходимо знать его характеристики. К основным параметрам двигателя относятся номинальная мощность, номинальный ток, напряжение питания, скорость вращения, схема подключения. Сведения о некоторых характеристиках содержатся на шильдике — табличке на корпусе двигателя. Однако иногда шильдик отсутствует, и параметры определяются по косвенным признакам.
К основным параметрам двигателя относятся номинальная мощность, номинальный ток, напряжение питания, скорость вращения, схема подключения. Сведения о некоторых характеристиках содержатся на шильдике — табличке на корпусе двигателя. Однако иногда шильдик отсутствует, и параметры определяются по косвенным признакам.
Мощность и ток
Ориентировочно мощность электродвигателя можно определить по его габаритам и диаметру вала. При одинаковых размерах и большем диаметре вала мощность на валу будет больше, а частота оборотов – меньше.
Если двигатель уже подключен, то примерная мощность определяется по уставкам защитных устройств, через которые он питается (мотор-автомат, тепловое реле). Если привод подключен через преобразователь частоты, мощность будет равна либо меньше мощности ПЧ.
Еще один способ – включить двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого нужно померить токоизмерительными клещами ток двигателя, который должен быть одинаков по всем обмоткам. На основании измеренного тока определяется мощность.
На основании измеренного тока определяется мощность.
Также приблизительно оценить мощность асинхронного двигателя, подключенного по схеме «звезда», можно, разделив его номинальный измеренный ток на 2. Для двигателей менее 1,5 кВт из-за потерь ток нужно делить на 2,2…2,5, для мощности более 30 кВт этот эмпирический коэффициент будет равен 1,8…1,9.
Если нет шильдика, косвенно мощность можно определить и по сопротивлению обмоток, заодно проверив их целостность. Для этого необходимо измерить сопротивления при помощи омметра и сравнить их с сопротивлением двигателей известных мощностей, либо обратиться к информации от производителей.
Частота вращения
Как было сказано выше, частоту оборотов двигателя можно оценить по диаметру вала. Но есть и другие способы.
Согласно известной формуле, скорость вращения электродвигателя равна 60F/P, где F — частота питающей сети (50 Гц), Р – количество пар полюсов статора.
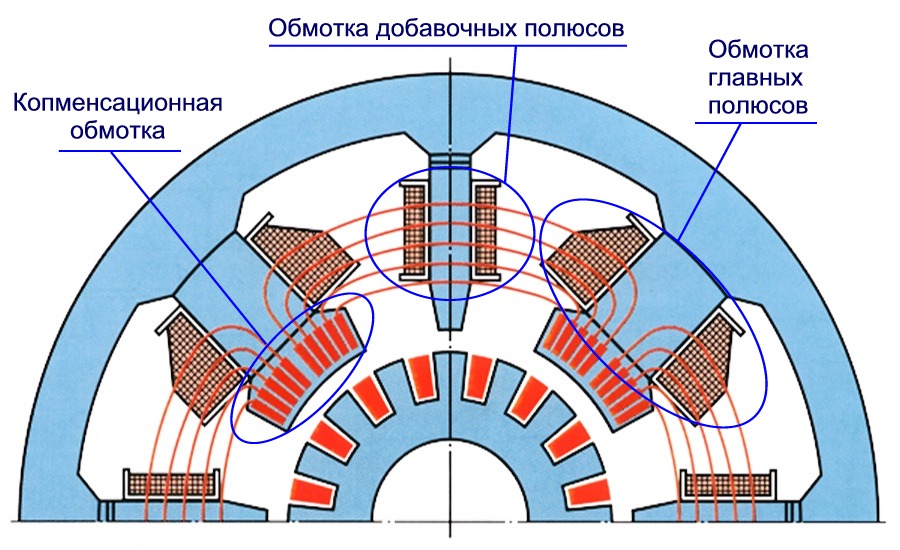
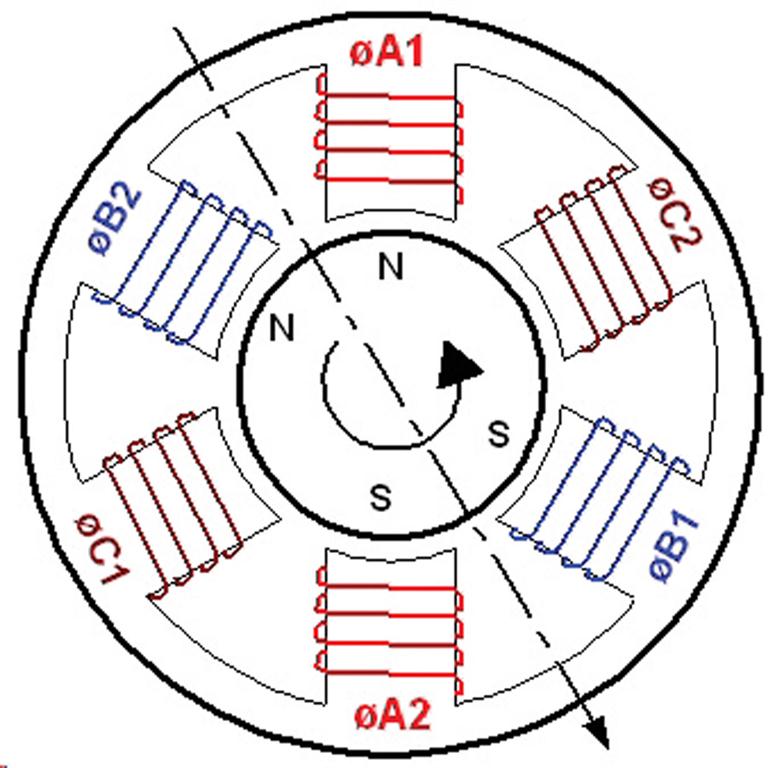
Полюсы можно посчитать, сняв переднюю или заднюю крышку. В двухполюсном электродвигателе (Р = 1) на каждую фазу приходится одна обмотка, содержащая 2 катушки, итого для трех фаз 6 катушек. Исходя из способа намотки нужно определить конфигурацию катушки, затем установить способ намотки всего статора. При количестве пар полюсов Р = 1 скорость вращения составит 3000 об/мин, при P = 2 – 1500 об/мин и так далее.
В двухполюсном электродвигателе (Р = 1) на каждую фазу приходится одна обмотка, содержащая 2 катушки, итого для трех фаз 6 катушек. Исходя из способа намотки нужно определить конфигурацию катушки, затем установить способ намотки всего статора. При количестве пар полюсов Р = 1 скорость вращения составит 3000 об/мин, при P = 2 – 1500 об/мин и так далее.
Отметим, что реальная скорость вращения двигателя отличается от расчетной за счет механических потерь и скольжения электромагнитного поля. У маломощных двигателей рабочая скорость под нагрузкой может быть ниже расчетной на 10-15 %.
Напряжение питания
Напряжение можно определить по схеме включения. Если двигатель подключен «звездой», его питающее линейное напряжение равно 380 В, а если «треугольником» – 220 В. Тогда в первом случае электродвигатель можно питать от сети напрямую, во втором – от однофазной сети через конденсатор или преобразователь частоты.
В большинстве новых двигателей для определения схемы включения достаточно вскрыть коробку борно. В ней расположены три пары проводов, подключенных по одной из схем, а на обратной стороне крышки борно указаны схемы и напряжения питания.
В ней расположены три пары проводов, подключенных по одной из схем, а на обратной стороне крышки борно указаны схемы и напряжения питания.
В двигателях, подвергшихся перемотке, схему собирают внутри, и из корпуса выводят три провода. В этом случае можно предположить, что напряжение питания равно 380 В и включить двигатель через защитный мотор-автомат. Если рабочее напряжение выше (660 В), двигатель будет вращаться замедленно, с пониженной мощностью. Если ниже (220 В), возникнет перегрузка, и сработает мотор-автомат, либо двигатель начнет перегреваться.
Заключение
Процесс определения параметров двигателя без шильдика часто бывает интуитивным, на основании опыта и последовательных измерений. Также важно при пробных включениях двигателя обеспечивать его защиту и электробезопасность.
Другие полезные материалы:
Выбор электродвигателя для компрессора
Подбор импортного аналога двигателя АИР
Принципы программирования ПЛК
Как определить число полюсов асинхронного двигателя?
Есть много гораздо более интересных вопросов, связанных с числом полюсов асинхронных двигателей, например:
1. Увеличивает ли асинхронный двигатель, питаемый от сети (скажем, 50 Гц), свой крутящий момент в «р» раз с ростом полюса число «p», так как его скорость уменьшается во времени «p» (как в коробке передач)?
Увеличивает ли асинхронный двигатель, питаемый от сети (скажем, 50 Гц), свой крутящий момент в «р» раз с ростом полюса число «p», так как его скорость уменьшается во времени «p» (как в коробке передач)?
2. Пусть у нас есть асинхронный двигатель с p=2 и питаем его от сети 50 Гц. Затем пересоединяем витки обмотки, чтобы расположить p=4 и питать, если растет сетка 100 Гц. Характеристики этих двух моторов разные или одинаковые? Обратите внимание, за исключением частоты и соединений между катушками, все осталось прежним.
Зависит от требуемой скорости. n (об/мин) = (60 x f ) / N , где:- f = частота и N = количество пар полюсов. 60 предназначен для преобразования оборотов в секунду в обороты в минуту, поскольку частота измеряется в циклах в секунду. Пары полюсов существуют потому, что любой стержень должен быть построен в парах верх и низ / левый и правый, поэтому за один цикл он переместится на половину расстояния.
Если вы используете 50 Гц и имеете двухполюсный двигатель 60 x 50/1 = 3000 об/мин.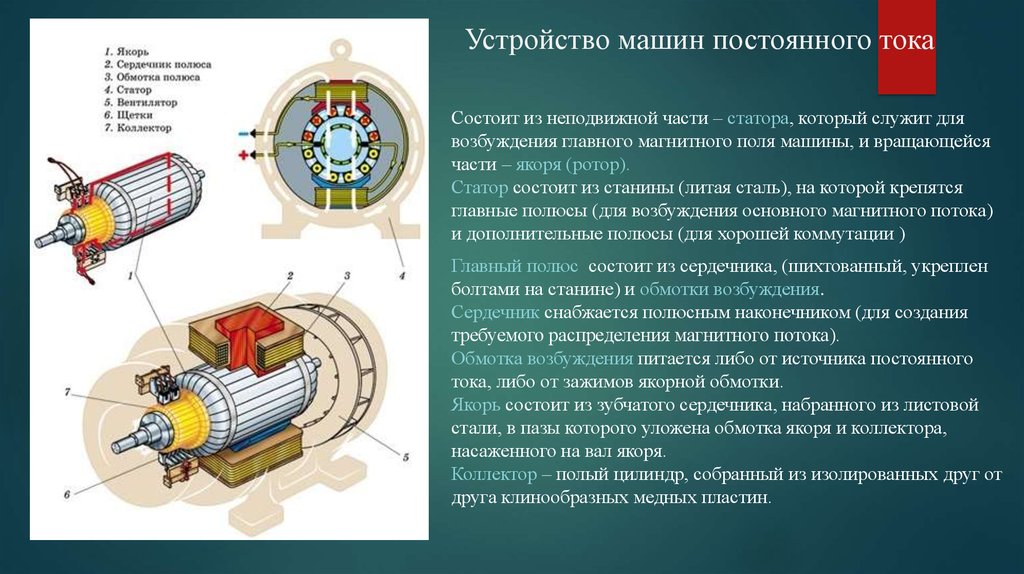 Асинхронный двигатель будет работать с немного меньшей скоростью из-за «скольжения», что придает двигателю крутящий момент. Например, 5,5 кВт, 400 В, 2-полюсный двигатель будет работать со скоростью примерно 2880 об/мин.
Асинхронный двигатель будет работать с немного меньшей скоростью из-за «скольжения», что придает двигателю крутящий момент. Например, 5,5 кВт, 400 В, 2-полюсный двигатель будет работать со скоростью примерно 2880 об/мин.
Для четырехполюсной машины 60 x 50 / 2 = 1500 об/мин, поэтому двигатель того же размера на 5,5 кВт, 400 В, но с 4 полюсами будет иметь номинальную скорость 1500 об/мин, но будет работать со скоростью около 1455 об/мин.
При выборе трехфазного двигателя количество полюсов выбирается для достижения требуемой скорости вращения. Вот две таблицы, одна для источника питания 50 Гц, а другая для источника питания 60 Гц:
Формула: n = 60 x f / p , где n = синхронная скорость; f = частота сети и p = пары полюсов на фазу. Фактическая рабочая скорость представляет собой синхронную скорость минус скорость скольжения.
Для трехфазного питания 50 Гц:
2 полюса или 1 пара полюсов = 3000 об/мин (минус скорость скольжения = около 2750 об/мин или 6-7% n )
4 полюса или 2 пары полюсов = 1500 RPM
6 полюсов или 3 пары полюсов = 1000 об/мин
8 полюсов или 4 пары полюсов = 750 об/мин
10 полюсов или 5 пар полюсов = 600 об/мин
12 полюсов или 6 пар полюсов = 500 об/мин
16 полюсов или 8 пар полюсов = 375 об/мин
Для трехфазного питания 60 Гц:
около 2750 об/мин или 6-7% n )4 полюса или 2 пары полюсов = 1800 об/мин
6 полюсов или 3 пары полюсов = 1200 об/мин
8 полюсов или 4 пары полюсов = 900 об/мин
или 10 полюсов пар полюсов = 720 об/мин
12 полюсов или 6 пар полюсов = 600 об/мин
16 полюсов или 8 пар полюсов = 450 об/мин
Чтобы определить количество полюсов, вы можете прочитать табличку с техническими данными напрямую или рассчитать его по числу оборотов в минуту, указанному на табличке с техническими данными, или вы можете подсчитать количество катушек и разделить на 3 (полюса на фазу) или на 6 (пары полюсов на одну фазу). фаза). Когда мощность асинхронного двигателя постоянна, крутящий момент увеличивается пропорционально уменьшению скорости.
фаза). Когда мощность асинхронного двигателя постоянна, крутящий момент увеличивается пропорционально уменьшению скорости.
С появлением частотно-регулируемого привода (VFD) вы можете иметь любую частоту / номинальное напряжение, какое пожелаете. Я часто вижу таблички с такими вещами, как 575 В переменного тока, 42,5 Гц и т. Д. Когда производятся эти «специальные» машины, я обычно вижу 6-полюсные машины, но это может быть просто предпочтение производителя.
Как рассчитать количество полюсов двигателя и Kv двигателя
Лорен Нагель
Опубликовано: 10 июля 2021 г. Последнее обновление: 10 июля 2021 г. бесщеточный двигатель постоянного тока (BLDC), вы, вероятно, сталкивались с понятиями полюсов двигателя и двигателя Kv. Оба эти параметра полезны для характеристики вашего двигателя и оценки его производительности.
В этой статье мы расскажем, что означают эти показатели, как их рассчитать и измерить и, наконец, как они связаны.
Содержание:- Как определить количество полюсов в бесщеточном двигателе
- Что такое полюса двигателя?
- Количество полюсов двигателя в сравнении с парами полюсов
- Число полюсов двигателя и электрическая скорость
- Как рассчитать количество полюсов двигателя (уравнения)
- Как измерить полюса двигателя
- Как рассчитать Kv бесщеточного двигателя
- Что такое двигатель Kv?
- Что означает рейтинг Kv?
- Как измерить Kv (уравнения)
- Как измерить двигатель Kv
- Связь между полюсами двигателя и Kv
После выполнения расчетов мы будем использовать испытательный стенд Series 1580 для подтверждения наших результатов.
Часть 1. Как определить количество полюсов в бесщеточном двигателе Что такое полюса двигателя?
В бесщеточном двигателе по окружности ротора расположено несколько магнитов (рис. 1). Эти магниты также называют «полюсами» двигателя. Когда электрический ток подается на катушки в статоре, ротор начинает вращаться, поскольку его магниты отталкивают аналогичные электромагниты.
На приведенной ниже диаграмме синий ротор содержит постоянные магниты в двигателе внутреннего колеса (слева) и двигателе внешнего колеса (справа). Зеленый статор удерживает электромагнитные катушки.
Рис. 1: Магниты / полюса двигателя в двигателях с направляющими и ведомыми роторами
Полюса двигателя и пары полюсов обращены и взаимодействуют со статором. Есть равное количество северных и южных магнитов, обращенных от ротора, и каждый набор магнитов N и S называется «парой полюсов». На каждую пару полюсов двигателя приходится два полюса, поэтому, если двигатель имеет 8 полюсов/магнитов, имеется 4 пары полюсов. По этой же причине у вас почти всегда будет четное число полюсов (2, 4, 6, 8 и т. д.), поскольку каждому магниту нужен противоположный полюс.
По этой же причине у вас почти всегда будет четное число полюсов (2, 4, 6, 8 и т. д.), поскольку каждому магниту нужен противоположный полюс.
Пример.
- 2-полюсный двигатель → 1 северный магнит и 1 южный магнит → 1 пара полюсов
- 8-полюсный двигатель → 4 северных магнита и 4 южных магнита → 4 пары полюсов
Скорость двигателя обратно пропорциональна количеству полюсов ротора. Связь поясняется следующей формулой:
Где:
Ns = синхронная скорость
f = частота трехфазной сети
А #p = число полюсов
Альтернативно это можно записать как:
Где:
Ns = синхронная скорость
f = частота трехфазного источника питания
А #pp = количество пар полюсов
Как рассчитать количество полюсов двигателя Поскольку количество полюсов равно количеству постоянных магнитов в роторе, самый простой способ определить количество полюсов — подсчитать количество магнитов вручную. Это возможно, если вы можете заглянуть внутрь двигателя или снять внешний кожух. Если вы не можете снять корпус, это может стать сложной задачей, так как магниты могут быть довольно маленькими и многочисленными.
Это возможно, если вы можете заглянуть внутрь двигателя или снять внешний кожух. Если вы не можете снять корпус, это может стать сложной задачей, так как магниты могут быть довольно маленькими и многочисленными.
Дополнительная литература: Как работают двигатели BLDC
Рисунок 2: Подсчет магнитов/полюсов внутри бесщеточного двигателя
Были предложены и другие простые процедуры, такие как движение магнита вокруг ротора, чтобы увидеть, где происходит притяжение и отталкивание. Этот метод наиболее приемлем для двигателей с внешним ротором, где магниты находятся вне статора у поверхности. Будьте осторожны, если вы попытаетесь использовать этот метод, так как магниты внутри вашего ротора могут быть размагничены под воздействием более сильного магнита.
Другой вариант, который требует немного больше усилий и оборудования, включает в себя экспериментальное определение скорости двигателя и частоты источника питания, а затем преобразование приведенного ниже уравнения для определения количества полюсов двигателя:
Чтобы измерить скорость двигателя, вам понадобится оборудование для обратного привода двигателя (например, дрель), а также устройство для измерения скорости вращения для измерения числа оборотов, например, тахометр.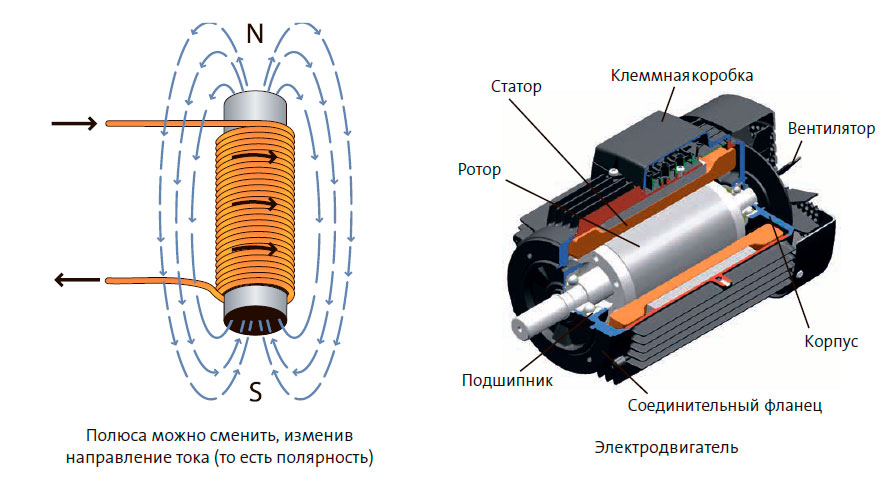 Вам также понадобится устройство для измерения частоты генерируемой обратной ЭДС, например, осциллограф. Одновременно измерьте скорость и частоту, затем введите значения в приведенное выше уравнение, чтобы определить количество полюсов в вашем двигателе.
Вам также понадобится устройство для измерения частоты генерируемой обратной ЭДС, например, осциллограф. Одновременно измерьте скорость и частоту, затем введите значения в приведенное выше уравнение, чтобы определить количество полюсов в вашем двигателе.
Возможно, самый простой способ измерить количество полюсов в вашем двигателе — это определить его для вас на испытательном стенде.
Некоторые из наших испытательных стендов поставляются с предварительно написанными автоматическими сценариями для расчета количества полюсов в вашем двигателе, включая серию 1580.
Просто введите номинал Kv вашего двигателя в сценарий, затем запустите автоматический тест Ваш мотор установлен на испытательном стенде (без пропеллера, так как мотор будет работать на полной скорости).
Программное обеспечение предоставит вам количество полюсов для вашего двигателя, как только будет выполнен тест, который занимает всего пару минут.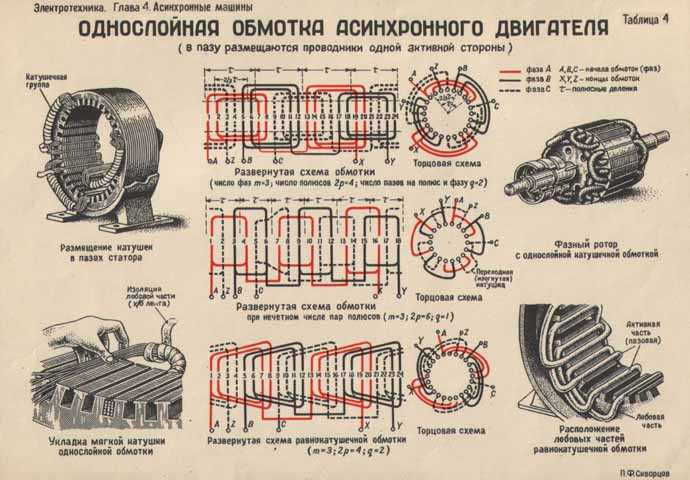
Рисунок 3: Автоматический сценарий подсчета числа полюсов двигателя с использованием программы RCbenchmark Motor Kv позволяет описать взаимосвязь между пиковым напряжением и скоростью вращения бесщеточного двигателя в режиме холостого хода. Единицей для Kv является об/мин/В, и его можно оценить, разделив скорость вращения ненагруженного двигателя на приложенное напряжение. По правде говоря, напряжение, которое мы должны учитывать, на самом деле является противоэлектродвижущей силой (ЭДС), а не приложенным напряжением. В бесщеточном двигателе противоэлектродвижущая сила (ЭДС) представляет собой напряжение, возникающее в направлении, противоположном направлению тока, обеспечиваемого источником питания, вызванное движением катушек через магнитное поле в двигателе. Это можно объяснить законом Фарадея, который показывает, что катушка, движущаяся внутри магнитного поля, создает внутри катушки поток электронов, называемый напряжением или ЭДС. Когда двигатель вращается, генерируемая противо-ЭДС пропорциональна скорости вращения ротора: по мере увеличения числа оборотов увеличивается и противо-ЭДС. На полном газу без нагрузки (игнорируя собственную инерцию двигателя) мы можем описать взаимосвязь с помощью этой формулы: Значение Kv дает оценку того, сколько оборотов совершит двигатель на каждый приложенный к нему вольт. Этот рейтинг может быть полезен для сравнения двигателей, которые физически имеют одинаковый размер, но имеют разные рабочие характеристики из-за их внутренней работы. Как правило, по мере увеличения количества витков в катушках Kv двигателя уменьшается. Говоря механически, двигатели с низким Kv имеют большее количество обмоток из более тонкого провода, а тонкий провод несет больше вольт при меньшем токе. Двигатели с высоким Kv имеют меньше обмоток, но с более толстым проводом, который может выдерживать более высокий ток при меньшем напряжении. Дополнительная литература: Анализ мощности и эффективности двигателя BLDC Применительно к дронам двигатели с низким Kv, как правило, работают на более низких оборотах и создают больший крутящий момент, что идеально подходит для больших винтов и больших дронов. Двигатели с высоким Kv работают на более высоких оборотах и идеально подходят для малых и быстро вращающихся винтов с низким крутящим моментом. Таким образом, более легкие, быстро движущиеся дроны, такие как гоночные квадроциклы, лучше всего обслуживаются двигателями с высоким Kv, а более тяжелые и медленные дроны лучше обслуживаются двигателями с низким Kv. Рисунок 4. Гоночный дрон EMAX Hawk Pro использует двигатель на 2400 кВт, тогда как Foxtech Gaia 19Беспилотник для тяжелых грузов 0MP использует двигатель мощностью 100 кВ Еще одно практическое применение — двигатели внутреннего и наружного бегунков. Важно отметить, что Kv не является окончательным способом оценки производительности двигателя, поскольку марка двигателя также может влиять на его эффективность. При одном и том же значении Kv двигатель одной марки может работать лучше или хуже, чем другая, что будет выявлено только в ходе испытаний. Если мы вернемся к нашей предыдущей формуле: , мы можем изменить ее, чтобы показать, что: в уравнении, которое даст вам довольно хорошую оценку двигателя Kv. Для более точной оценки вы можете измерить напряжение между двумя выводами в цепи, чтобы получить среднеквадратичное (RMS) напряжение, а затем умножить его на sqrt(2) или 1,414, чтобы получить пиковое напряжение, которое вы можете подключить к этому уравнение: 0,95 — это значение, которое учитывает отклонения от теоретической модели, чтобы обеспечить значение, более близкое к наблюдаемому экспериментально. Экспериментальное измерение Kv, возможно, лучший способ получить точное представление о действительном Kv вашего двигателя. Мы регулярно наблюдали различия между заявленным и измеренным Kv протестированных нами двигателей, которые вы, вероятно, также заметите. Мы предоставляем предварительно написанный сценарий в нашем программном обеспечении RCbenchmark, который позволяет вам экспериментально измерить Kv, запустив двигатель через испытание без нагрузки. Все, что вам нужно сделать, это подключить двигатель к испытательному стенду RCbenchmark, ввести количество полюсов двигателя на вкладке «Настройка», а затем запустить тест (без пропеллера). Программное обеспечение автоматически рассчитает Kv вашего двигателя после завершения теста. Даже если на вашем двигателе указано номинальное значение Kv, может быть интересно проверить его, чтобы увидеть, соответствует ли экспериментальное значение Kv рекламируемому. Рисунок 5: Автоматический сценарий, вычисляющий Kv с помощью программного обеспечения RCbenchmark 
 Уравнения в следующем разделе обеспечивают математическую демонстрацию этой концепции.
Уравнения в следующем разделе обеспечивают математическую демонстрацию этой концепции. Инраннер обычно имеет более высокое значение Kv, чем аутраннер того же размера. Больший диаметр ротора в аутраннере позволяет использовать больше постоянных магнитов. Больше магнитов (полюсов) → меньше скорость → меньше Kv. Небольшой диаметр бегунка также означает, что он имеет меньшую окружность для покрытия за один оборот, следовательно, больше оборотов при том же напряжении.
Инраннер обычно имеет более высокое значение Kv, чем аутраннер того же размера. Больший диаметр ротора в аутраннере позволяет использовать больше постоянных магнитов. Больше магнитов (полюсов) → меньше скорость → меньше Kv. Небольшой диаметр бегунка также означает, что он имеет меньшую окружность для покрытия за один оборот, следовательно, больше оборотов при том же напряжении. Этот коэффициент общепринят для расчетов Kv.
Этот коэффициент общепринят для расчетов Kv.
Таким образом, соотношение между числом полюсов двигателя и Kv обратно пропорционально. Это имеет смысл, когда мы думаем об этом практически.
Более крупный двигатель с большим числом полюсов потребует высокого крутящего момента и будет работать на низкой рабочей скорости. Таким образом, используемый двигатель будет иметь большое число полюсов и низкое значение Kv.
Двигатель меньшего размера с меньшим количеством полюсов будет работать на высоких оборотах и создавать относительно низкий крутящий момент. Следовательно, двигатель будет иметь малое количество полюсов и высокое значение Kv.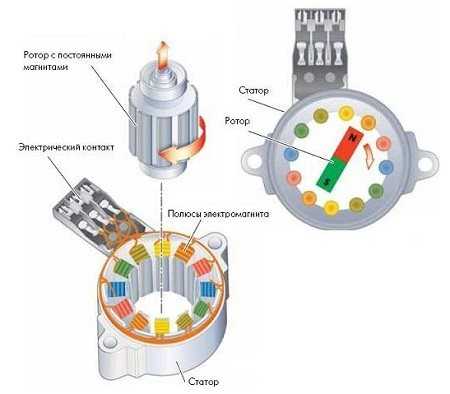
Понятия, рассматриваемые в этой статье, полюса бесщеточного двигателя и Kv двигателя, являются ключевыми для понимания свойств и производительности двигателей BLDC. Знание того, как интерпретировать эти цифры, может помочь вам выбрать лучший двигатель для вашего дрона или электрического самолета и повысить производительность и эффективность. Эффективность напрямую связана со временем полета, полезной нагрузкой и дальностью полета, поэтому эта информация очень ценна.
Если вы хотите иметь возможность автоматически измерять количество полюсов в двигателе и его Kv, мы предлагаем проверить испытательный стенд серии 1580. Как упоминалось в статье, их программное обеспечение поставляется с предварительно написанными сценариями для автоматического расчета обоих этих значений. Экономит ваше драгоценное время и предлагает больше возможностей для характеристики вашего двигателя.
Если у вас есть какие-либо вопросы по содержанию этой статьи, не стесняйтесь оставлять нам комментарии, и мы обязательно ответим.