
Как определить мощность двигателя по диаметру вала. Габаритные размеры
Здесь вы найдете максимально полные технические данные о габаритах и установочных размерах общепромышленных асинхронных электродвигателей АИР. Монтажные исполнения, габариты, крепежные размеры по лапам, диаметры валов и фланца, ширина шпонки и шпоночного паза. Сводные таблицы габаритно-присоединительных размеров асинхронных трехфазных двигателей АИР 63-355 габарита и 4АМ 100-355 мм.
Табличные данные позволят быстро вычислить мощность двигателя по диаметру вала. Зная присоединительные размеры, Вы сможете заказать соединительную муфту при комплектации электродвигателя с другим оборудованием (насосом, вентилятором, редуктором).
Если у Вас останутся вопросы, смело звоните менеджерам Слобожанского завода по указанным телефонам. Мы проконсультируем по техническим особенностям и производителям электродвигателей АИР, подберем нужное оборудование и доставим в короткие сроки в Ваш город.
Благодаря удобной навигации Вы можете сразу перейти к нужной таблице.

Обозначения основных монтажных и присоединительных размеров двигателей
Условные обозначения габаритных размеров:- h — высота вращения вала или габарит электродвигателя. Высота от центра оси вала до земли. Важный присоединительный размер при сборе агрегата и центровке
- l30*h41*d24 — длина, высота, ширина электродвигателя АИР, размеры по габаритам. Необходимы для калькуляции цены доставки и необходимого места при транспортировке
- m — вес электродвигателя, масса. Нужен для расчета транспортных издержек и сопромата
- d1 — диаметр вала. Габаритно-присоединительный размер АИР, необходимый при агрегатировании с другим оборудованием или подбора полумуфты
- d20 — ширина, крепежный диаметр фланца.
- d22 — диаметр отверстий фланца. Габаритный размер для изготовления или подбора ответного фланца
- l10 и b10 – расстояние между крепежными отверстиями на лапах электродвигателя. Важный габаритно-установочный размер, необходимый при монтаже электродвигателя к станине или на платформу
- L1 – длина вала
- b1 – ширина шпонки. Размер необходим для изготовления полумуфты
Монтажное исполнение – фланец, лапы, комбинированное
Присоединительный и габаритный чертеж монтажного исполнения электродвигателя АИР на лапах (IM 1081), лапы-фланец (IM 2081), чистый фланец (IM 3081).Чертеж двигателя на лапах

Чертеж IM2081, IM3081 (лапы-фланец)

Таблица диаметров валов электродвигателей для определения
Как определить мощность электродвигателя по диаметру вала? С помощью таблицы с диаметрами валов, шириной шпонки электродвигателей стандарта «Интерэлектро» — АИР, 4АМ, 4А, 5АМ. Данные характеристики полезны при подборе двигателя, подготовке к монтажу, проточке муфты. При наличии маркировки, определение мощности, скорости вращения и прочих характеристик не составит сложности.| Диаметр вала, d1 | Ширина шпонки, b1 | 3000 об | 1500 об | 1000 об | 750 об |
| 14 | 5 | 0,37/3000 | 0,25/1500; 0,37/1500 | 0,18/1000; 0,25/1000 | — |
| 19 | 6 | 0,75/3000; 1,1/3000 | 0,55/1500; 0,75/1500 | 0,37/1000; 0,55/1000 | — |
| 22 | 6 | 1,5/3000; 2,2/3000 | 1,1/1500; 1,5/1500 | 0,75/1000; 1,1/1000 | — |
| 24 | 8 | 3/3000 | 2,2/1500 | 1,5/1000 | — |
| 28 | 8 | 4/3000; 5,5/3000 | 3/1500; 4/1500 | 2,2/1000 | — |
| 32 | 10 | 7,5/3000 | 5,5/1500 | 3/1000 | 2,2/750; 3/750 |
| 38 | 10 | 18,5/3000 | 7,5/1500; 11/1500 | 5,5/1000; 7,5/1000 | 4/750; 5,5/750 |
| 42 | 12 | 15/3000; 18,5/3000 | — | — | — |
| 48 | 14 | — | 15/1500; 18,5/1500 | 11/1000; 15/1000 | 7,5/750; 11/750 |
| 55 | 16 | 37/3000; 45/3000; 55/3000 | 22/1500; 30/1500 | 18,5/1000 | 15/750 |
| 60 | 18 | — | 37/1500; 45/1500 | 22/1000; 30/1000 | 18,5/750; 22/750 |
| 65 | 18 | 75/3000; 90/3000 | 55/1500 | 55/1000 | 30/750 |
| 70 | 20 | 110/3000; 132/3000 | — | — | — |
| 75 | 20 | 160/3000; 200/3000 | 75/1500; 90/1500 | 45/1000; 55/1000 | 37/750; 45/750 |
| 80 | 22 | — | 110/1500; 132/1500 | 75/1000; 90/1000 | 55/750; 75/750 |
| 85 | 22 | 250/3000; 315/3000 | — | — | — |
| 90 | 25 | — | 160/1500; 200/1500 | 110/100; 132/1000 | 90/750; 110/750 |
| 100 | 28 | — | 250/1500; 315/1500 | 160/1000; 200/1000 | 132/750; 160/750 |
Габаритные размеры общепромышленных электродвигателей
Таблица габаритов и вес асинхронных электродвигателей АИР63
Все установочные размеры асинхронных электродвигателей АИР 63-го габарита: АИР 63A2, АИР63A4, АИР63B2, АИР63B4.| Двигатель | Параметры | l30*h41*d24, мм | H, мм | D1, мм | L1, мм | Крепеж по лапам | Крепеж по фланцу | Вес, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР63A2 | 0,37/3000 | 239х163х161 | 63 | 14 | 30 | 80 | 100 | 130 | 10 | 5,2 |
| АИР63A4 | 0,25/1500 | |||||||||
| АИР63B2 | 0,55/3000 | |||||||||
| АИР63B4 | 0,37/1500 | |||||||||
Таблица габаритных параметров асинхронных моторов 71
Крепежные и присоединительные размеры электродвигателей АИР71А2, АИР 71А4, АИР 71А6, АИР71В2, АИР 71В4, АИР 71В6.| Электродвигатель | Параметры | l30*h41*d24, мм | H, мм | D1, мм | L1, мм | Крепеж по лапам | Крепеж по фланцу | M, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР71А2 | 0,75/3000 | 275х190х201 | 71 | 19 | 40 | 90 | 112 | 165 | 12 | 8,7 |
| АИР71А4 | 0,55/1500 | |||||||||
| АИР71А6 | 0,37/1000 | |||||||||
| АИР71В2 | 1,1/3000 | |||||||||
| АИР71В4 | 0,75/1500 | |||||||||
| АИР71В6 | 0,55/1000 | |||||||||
Габаритно-присоединительные характеристики электромоторов 80 габарита
Присоединительные и монтажные размеры асинхронных электродвигателей АИР 80А2, АИР 80А4, АИР80А6, АИР 80B2, АИР80B4, АИР80B6.| Маркировка | Параметры | l30*h41*d24 | H | D1 | L1 | Крепеж по лапам | Крепеж по фланцу | Вес, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР80А2 | 1,5/3000 | 301х208х201 | 22 | 50 | 100 | 125 | 165 | 11 | 13,3 | |
| АИР80А4 | 1,1/1500 | |||||||||
| АИР80А6 | 0,75/1000 | |||||||||
| АИР80В2 | 2,2/3000 | 322х210х201 | 15 | |||||||
| АИР80В4 | 1,5/1500 | |||||||||
| АИР80В6 | 1,1/1000 | |||||||||
Габаритные и установочные параметры электродвигателей с высотой вала 90 мм
Размеры, длина, ширина, высота и диаметр вала и вес электродвигателя АИР90L2, АИР90L4, АИР 90L6. Присоединительные| Маркировка | Параметры | l30*h41*d24 | H | D1 | L1 | Крепеж по лапам | Крепеж по фланцу | M, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР90L2 | 3/3000 | 351х218х251 | 90 | 24 | 50 | 125 | 140 | 215 | 14 | 30 |
| АИР90L4 | 2,2/1500 | |||||||||
| АИР90L6 | 1,5/1000 | |||||||||
Таблица присоединительных габаритов двигателей АИР100. Установочные
Каталог асинхронных электродвигателей АИР 100S2, АИР 100S4, АИР100L2, АИР 100L4, АИР100L6 с крепежными и установочными размерами и весом.Каталог асинхронных двигателей АИР112. Диаметр 32мм
Справочник электродвигателей АИР112M2, АИР 112M4, АИР112M6, АИР 112M6, АИР112M8 с габаритными, установочными и присоединительными размерами.Характеристики моторов и установочные крепежи с высотой вала 132
Технический каталог асинхронных электродвигателей АИР 132S4, АИР132S6, АИР132S8, АИР132M2, АИР132M4, АИР132M6, АИР132M8. Размеры, вес и диаметр вала.Таблица крепежных и установочных типоразмеров электромоторов с высотой вала 160 мм
Габаритные, установочные и присоединительные размеры электродвигателей с высотой вала 160: АИР160S2, АИР160S4, АИР160S6, АИР160S8, АИР160M2, АИР160M4, АИР160M6, АИР160M8.Габаритно-установочные и вес двигателей 180 мм
Присоединительные и установочные размеры общепромышленных электродвигателей АИР в 180 габарите: АИР180S2, АИР180S4, АИР180M2, АИР180M4, АИР180M6, АИР180M8.Крепежные характеристики, присоединительные размеры моторов АИР200. Вал, диаметр.
Таблица установочных размеров общепромышленных электродвигателей 200 габарита: АИР200L2, АИР200L4, АИР200L6, АИР200L8, АИР200M2, АИР200M4, АИР200M6, АИР200M8.Привязка мощности и оборотов к установочным и присоединительным размерам АИР225
Каталог электродвигателей АИР 225S2, АИР225S4, АИР225S6, АИР225S8, АИР 225M2, АИР225M4, АИР225M6, АИР225M8 с габаритными, крепежными размерами и диаметром.| Маркировка | Параметры | l30*h41*d24 | H | D1 | L1 | Межосевые по лапам | Межосевые по фланцу | Вес, т | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР225М2 | 55/3000 | 836х536х551 | 225 | 55 | 110 | 311 | 356 | 500 | 19 | 0,32 |
| АИР225М4 | 55/1500 | 65 | 140 | 0,325 | ||||||
| АИР225М6 | 37/1000 | |||||||||
| АИР225М8 | 30/750 | |||||||||
Таблица посадочных и присоединительных параметров двигателей с 250 высотой вала
Габаритно-установочные размеры асинхронных электродвигателей АИР 250 габарита: АИР250S2, АИР250S4, АИР250S6, АИР250S8, АИР250M2, АИР250M4, АИР250M6, АИР250M8. Крепежи, диаметр.Габариты, присоединительные и крепежи двигателей АИР 280. Диаметр вала
Установочные, присоединительные размеры электродвигателей АИР 280 габарита: АИР280S2, АИР280S4, АИР280S6, АИР280S8, АИР 280M2, АИР280M4, АИР280M6, АИР280M8.Установочные параметры, крепежи и вес моторов 315 мм
Присоединительные и установочные размеры электродвигателя АИР 315S2, АИР315S4, АИР315S6, АИР315S8, АИР 315S10, АИР315М2, АИР315М4, АИР 315М6, АИР315М8, АИР315М10.>Присоединительные характеристики электромоторов с высотой оси 355 мм
Крепежные и установочные размеры электродвигателей АИР355S2, АИР355S4, АИР355S6, АИР355S8, АИР355S10, АИР355М2, АИР355М4, АИР 355М6, АИР355М8, АИР355М10.Как определить мощность электродвигателя без бирки? Формула
При отсутствии техпаспорта или бирки на двигателе возникает вопрос: как узнать мощность электродвигателя без таблички или технической документации? Самые распространенные и быстрые способы, о которых мы расскажем в статье:
- По диаметру и длине вала
- По габаритам и крепежным размерам
- По сопротивлению обмоток
- По току холостого хода
- По току в клеммной коробке
- С помощью индукционного счетчика (для бытовых электродвигателей)
Определение мощности двигателя по диаметру вала и длине
Простейшие способы определения мощности и марки двигателя – габаритные размеры – вал или крепежные отверстия. В таблице указаны длины и диаметры валов (D1) и длина (L1) для каждой модели асинхронного промышленного трехфазного мотора. Перейти к подробным габаритным размерам электродвигателей АИР

| Р, кВт | 3000 об. мин | 1500 об. мин | 1000 об. мин | 750 об. мин | ||||
| D1, мм | L1, мм | D1, мм | L1, мм | >D1, мм | L1, мм | D1, мм | L1, мм | |
| 1,5 | 22 | 50 | 22 | 50 | 24 | 50 | 28 | 60 |
| 2,2 | 24 | 28 | 60 | 32 | 80 | |||
| 3 | 24 | 32 | 80 | |||||
| 4 | 28 | 60 | 28 | 60 | 38 | |||
| 5,5 | 32 | 80 | 38 | |||||
| 7,5 | 32 | 80 | 38 | 48 | 110 | |||
| 11 | 38 | 48 | 110 | |||||
| 15 | 42 | 110 | 48 | 110 | 55 | |||
| 18,5 | 55 | 60 | 140 | |||||
| 22 | 48 | 55 | 60 | >140 | ||||
| 30 | 65 | |||||||
| 37 | 55 | >60 | 140 | 65 | 75 | |||
| 45 | 75 | 75 | ||||||
| 55 | 65 | 80 | 170 | |||||
| 75 | 65 | 140 | 75 | 80 | 170 | |||
| 90 | 90 | |||||||
| 110 | 70 | 80 | 170 | 90 | ||||
| 132 | 100 | 210 | ||||||
| 160 | 75 | 90 | 100 | 210 | ||||
| 200 | ||||||||
| 250 | 85 | 170 | 100 | 210 | ||||
| 315 | — | — | ||||||
Проверить мощность по габаритам и крепежным размерам

Таблица подбора мощности двигателя по крепежным отверстиям на лапах (L10 и B10):
|
Р, кВт |
3000 об. |
1500 об. |
1000 об. |
750 об. |
||||
|
L10, мм |
B10, мм |
L10, мм |
B10, мм |
L10, мм |
B10, мм |
L10, мм |
B10, мм |
|
|
1,5 |
100 |
125 |
100 |
125 |
125 |
140 |
140 |
160 |
|
2,2 |
125 |
140 |
140 |
160 |
190 |
|||
|
3 |
125 |
140 |
112 |
160 |
190 |
|||
|
4 |
112 |
160 |
140 |
216 |
||||
|
5,5 |
140 |
190 |
216 |
178 |
||||
|
7,5 |
190 |
216 |
178 |
254 |
||||
|
11 |
178 |
216 |
178 |
254 |
210 |
|||
|
15 |
254 |
254 |
210 |
241 |
279 |
|||
|
18,5 |
210 |
210 |
241 |
279 |
267 |
318 |
||
|
22 |
203 |
279 |
203 |
279 |
267 |
318 |
310 |
|
|
30 |
241 |
241 |
310 |
311 |
356 |
|||
|
37 |
267 |
318 |
267 |
318 |
311 |
356 |
406 |
|
|
45 |
310 |
310 |
406 |
349 |
||||
|
75 |
311 |
406 |
311 |
406 |
368 |
457 |
419 |
457 |
|
90 |
349 |
349 |
419 |
406 |
508 |
|||
|
110 |
368 |
457 |
368 |
457 |
406 |
508 |
547 |
|
|
132 |
419 |
419 |
457 |
610 |
355 |
|||
|
160 |
406 |
508 |
406 |
508 |
610 |
355 |
||
|
200 |
457 |
457 |
560 |
610 |
||||
|
250 |
610 |
355 |
610 |
355 |
560 |
610 |
||
|
315 |
630/800 |
686/630 |
— |
— |
||||
Для фланцевых электродвигателей
Таблица для подбора мощности электродвигателя по диаметру фланца (D20) и диаметру крепежных отверстий фланца (D22)
|
Мощность электродвигателя P, кВт |
3000 об. |
1500 об. |
1000 об. |
750 об. |
||||
|
D20, мм |
D22, мм |
D20, мм |
D22, мм |
D20, мм |
D22, мм |
D20, мм |
D22, мм |
|
|
1,5 |
165 |
11 |
165 |
11 |
215 |
14 |
215 |
14 |
|
2,2 |
215 |
14 |
265 |
|||||
|
3 |
215 |
14 |
365 |
|||||
|
4 |
265 |
300 |
19 |
|||||
|
5,5 |
265 |
300 |
19 |
|||||
|
7,5 |
265 |
300 |
19 |
|||||
|
11 |
300 |
19 |
||||||
|
15 |
350 |
|||||||
|
18,5 |
350 |
400 |
||||||
|
22 |
350 |
350 |
400 |
|||||
|
30 |
500 |
|||||||
|
37 |
400 |
400 |
500 |
|||||
|
45 |
400 |
|||||||
|
55 |
500 |
500 |
550 |
24 |
||||
|
75 |
500 |
550 |
24 |
|||||
|
90 |
500 |
28 |
||||||
|
110 |
550 |
24 |
550 |
24 |
28 |
|||
|
132 |
550 |
680 |
||||||
|
160 |
550 |
28 |
28 |
680 |
||||
|
200 |
550 |
740 |
24 |
|||||
|
250 |
680 |
680 |
740 |
24 |
— |
|||
|
315 |
680 |
— |
||||||
Расчет по току
Электродвигатель подключается к сети и измеряется напряжение. С помощью амперметра поочередно замеряем ток в цепи каждой из обмоток статора. Сумму потребляемых токов умножаем на фиксированное напряжение. Полученное число – мощность электродвигателя в ваттах.

Как проверить мощность электродвигателя по току холостого хода
Проверить мощность по току холостого хода можно с помощью таблицы.
|
Р двигателя, кВт |
Ток холостого хода (% от номинального) |
||||
|
Обороты двигателя, об/мин |
|||||
|
600 |
750 |
1000 |
1500 |
3000 |
|
|
0,75-1,5 |
85 |
80 |
75 |
70 |
50 |
|
1,5-5,5 |
80 |
75 |
70 |
65 |
45 |
|
5,5-11 |
75 |
70 |
65 |
60 |
40 |
|
15-22,5 |
70 |
65 |
60 |
55 |
30 |
|
22,5-55 |
65 |
60 |
55 |
50 |
20 |
|
55-110 |
55 |
50 |
45 |
40 |
20 |
Расчет по сопротивлению обмоток
Соединение звездой. Измеряем сопротивление между выводами (1-2, 2-3, 3-1). Делим на 2 – получаем сопротивление одной обмотки. Мощность одной обмотки расчитывается так: P=(220V*220V)/R. Цифру умножаем на 3 (количество обмоток) – получаем мощность двигателя.
Соединение треугольником. Измеряем сопротивление в начале и в конце каждой обмотки. По той же формуле определяем мощность и умножаем на 6.
Статья о схемах подключения электродвигателей к сети
Если нет возможности определить мощность двигателя самостоятельно
Мы все же рекомендуем доверить определение мощности электродвигателя или подбор профессионалам. Это существенно сэкономит Ваше время и позволит избежать досадных ошибок в эксплуатации оборудования. Сервисный центр «Слобожанского завода» — профессиональный подбор двигателя, дефектовка, капитальный и текущий ремонт и перемотка электродвигателей любых типов и любой мощности. Доверяйте профессионалам.
Выбор электродвигателя, как подобрать электродвигатель, советы.
Выбор электродвигателя и расчет его рабочих параметров
Как правильно подобрать электродвигатель для оптимального и безаварийного функционирования системы «двигатель – нагрузка»? Как повысить надежность системы в целом? Какие условия должны быть учтены в первую очередь? Как уменьшить пусковой ток, увеличить пусковой момент или обеспечить плавность пуска? Это далеко неполный список вопросов, которые задают покупатели, обращаясь в нашу компанию. В данной статье мы постараемся максимально полно ответить на эти вопросы. Мы надеемся, что статья будет полезна Вам и поможет решить ряд проблем, возникающих как при эксплуатации старых, так и выборе новых электродвигателей.
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
1. Двигатели постоянного тока.
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором. Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
2. Синхронные двигатели.
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска.
Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
3. Асинхронные двигатели.
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
1. Вентилятор.
 ,
,
где Q [м3/с] – производительность вентилятора, Н [Па] – давление на выходе вентилятора, ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно, kз – коэффициент запаса.
2. Насос
 ,
,
где Q [м3/с] – производительность насоса, g=9,8 м/с2 – ускорение свободного падения, H [м] – расчетная высота подъема, ρ [кг/м3] – плотность перекачиваемой жидкости, ηнас, ηпер – КПД насоса и передаточного механизма соответственно, kз – коэффициент запаса.
3. Поршневой компрессор
 ,
,
где Q [м3/с] – производительность компрессора, А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления, ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно, kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением

Полная мощность, потребляемая из сети:
1. для двигателей постоянного тока (она же активная)

2. для двигателей переменного тока

при этом потребляемые активная и реактивная мощности соответственно

В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
1. Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
2. Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
3. Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
4. Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
5. Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
 ,
,
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.

Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).

Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой: 1 – на открытом воздухе; 2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков; 3 – в закрытых помещениях без искусственного регулирования климатических условий; 4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия: У – умеренный климат; УХЛ – умеренно холодный климат; ХЛ – холодный климат; Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
- 1. экономия электроэнергии;
- 2. плавность пуска и снижение пусковых токов;
- 3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
В случае возникновения вопросов, а также необходимости расчета параметров двигателя для Вашего нагрузочного механизма обращайтесь в наш технический отдел по координатам, приведенным на сайте в разделе «Контакты».
Расшифровка обозначений электродвигателей. Маркировка двигателей.
В настоящее время перед потребителем часто встает вопрос — как расшифровать маркировку электродвигателя. Во времена СССР такой вопрос практически не стоял из-за того, что маркировка электродвигателей не различалась в зависимости от завода-производителя и регламентировалась нормативными документами.
Основные типы двигателей назывались А, А2, АО2, 4А, 4АМ. Отличались по маркировке электродвигатели производимые в странах СЭВ, например, в Болгарии вместо маркировки 4АМ использовалась «МО» и вместо 4АМН — «М».
Сейчас многие заводы-изготовители использует свою маркировку. Приведем основные типы обозначений марок общепромышленных низковольтных асинхронных электродвигателей разных производителей.
Маркировка состоит из нескольких основных частей:
- Марка
- Признак модификации
- Высота оси вращения
- Установочный размер по длине станины
-
Длина сердечника
- Число полюсов
-
Признак по назначению (конструктивная модификация)
- Климатическое исполнение
- Категория размещения
1. Марка электродвигателя (электродвигатели всех марок одинаковы по присоединительным размерам и в большинстве случаев, при прочих равных условиях, взаимозаменяемы, т.е. если у вас установлен двигатель АДМ90L2У3, то его можно заменить на электродвигатель марки АД90L2У3, А90L2У3 или АИР90L2У3):
— во времена Советского Союза
— с 1949 г. — А (IP23), АО (IP44)
— с 1961 г. — А2 (IP23), АО2 (IP44)
— с 1975-1980 — 4А (IP44), 4АН (IP23), 4АМ (IP44), 4АМН (IP23)
— с 1985-1995 — АИР (IP44, IP54), 5АН (IP23), 5АМН (IP23)
— в настоящее время: АИР, А, 5А, 5АМ, 5АМХ, АД, АДМ, АИРМ, (АО3, АО4 выпускаются ЗАО «БЭМЗ»):
«АИР» производят (по высоте оси вращения):
- ОАО «ELDIN» — 160
- ОАО «ВЭМЗ» — 180
- ОАО «Могилевский завод «Электродвигатель» — с 56 по 180
- ОАО «Полесьеэлектромаш» — с 71 по 112
- ЗАО «Мосэлектромаш» — с 56 по 71
- ОАО «Укрэлектромаш» — с 63 по 100
- ОАО «Электромотор» — 71, 80
«А» — ОАО «ELDIN» — с 71 по 132 и с 180 по 355.
«5А» — ОАО «ВЭМЗ» — 80 (снят с производства), 200, 225
«5АМ» — ОАО «ВЭМЗ» — 250, 280, 315
«5АМХ» — ОАО «ВЭМЗ» — со 132 по 180 (переименованы недавно, ранее назывались: 112 — 5АМ (снят с производства), 132 — АИРМ, 160 — 5А, 180 — АИР)
«АД» — ОАО «Сибэлектромотор» — с 71 по 90 и с 132 по 225 (не произодятся)
«АИРМ» — ОАО «Сибэлектромотор» — 112 (не производятся)
«АИРМ» — ОАО «Электромотор» — 63, 100
«АДМ» — ОАО «Уралэлектро» — с 56 по 132
«АО3«, «АО4» — ЗАО «БЭМЗ»
2. Признак модификации (может применяться одновременно несколько обозначений в одной марке, ниже приведен не полный перечень).
- С — с повышенным скольжением
- Е, 3Е, ЕУ — однофазный двигатель
- В — встаиваемый
- П — пристраевыемый
- М — модернизированный
- Х — с алюминиевой станиной
- К — с фазным ротором
- Р — с повышенным пусковым моментом
- Ф — с принудительным охлаждением
3. Высота оси вращения.
В соответствии с ГОСТ13267, ряд высот оси вращения — 50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355.
4. Установочный размер по длине станины.
По возрастанию: S, M, L. (от английских слов: Short, Medium, Long)
Также возможно отсутствие обозначения при единственном установочном размере по длине станины в одной высоте оси вращения.
5. Длина сердечника при одном и том же установочном размере.
По возрастанию: А, В, С.
6. Число полюсов (или частота вращения).
2, 4, 6, 8, 10, 12 или в случае многоскоростных электродвигателях: 2/4, 8/6/4, и т.д.
7. Признак по назначению (может применяться одновременно несколько обозначений в одной марке).
- Б — со встроенной температурной защитой
- Б1 — с датчиком температуры подшипника
- Б2 — с датчиком и антиконденсатным подогревателем
- Е — со встроенным тормозом
- Е2 — с тормозом с ручным растормаживающим устройством
- Ж, Ж1, Ж2 — со специльным выходным концом вала
- РЗ — для мотор-редукторов
- Ш — для промышленных швейных машин (также применяется в марке 5АН для специального исполнения по конструкции для насосов)
- П — повышенной точности по установочным размерам
- Ф — хладономаслостойкое обозначение
- А — для атомных электростанций
- Х2 — химостойкие
- Л — для лифтов
- С — для ста
Параметры электродвигателя
Таблица 1
Номер варианта | 50* |
|
Тип двигателя | МТ-41-8 |
|
Номинальная мощность | 11 | Квт |
Номинальное фазное напряжение | 220 | В |
Номинальный ток статора | 30,8 | А |
Номинальная скорость | 715 | об/мин |
Активное сопротивление статора | 0,43 | Ом |
Активное сопротивление ротора | 0,0835 | Ом |
Индуктивное сопротивление статора | 0,515 | Ом |
Индуктивное сопротивление ротора | 0,171 | Ом |
Коэффициент приведения | 2,33 | |
Число полюсов | 8 |
*- задается преподавателем.
Расчеты параметров, используемых во всех пунктах задания.
Результаты расчетов сведены в табл.2.
Таблица 2
N/N | Параметры | Расчетные уравнения | Результаты | Един. измерения |
1 | Число |
| 750 | |
2 | Синхронная скорость |
| 3,14 | об/мин |
3 | Синхронная скорость |
| 78,54 | 1/c |
4 | Приведенное активное сопротивление ротора |
| 0,19 | |
5 | Приведенное индуктивное сопротивление ротора |
| 0,40 | |
6 | Суммарное индуктивное сопротивление двигателя |
| 0,91 | |
7 | Номинальная скорость |
| 74,87 | 1/c |
8 | Номинальный момент |
| 146,91 | Нм |
9 | Номинальное скольжение |
| 0,0467 |

2. Реостатное регулирование скорости
Критический момент в двигательном режиме
| (1) |
.
Критическое скольжение в двигательном режиме на естественной характеристике
| (2) |
 .
.Уравнение для расчета естественной характеристики в двигательном режиме
| (3) |
 .
. где  — коэффициент
— коэффициент
| (4) |
 .
. Установившееся
скольжение при работе двигателя на
естественной характеристике и моменте
сопротивления  определяется уравнением
определяется уравнением
| (5) |
 .
. где  — коэффициент
— коэффициент
| (6) |
 .
.Решая квадратное уравнение, получаем
| (7) |
 .
.Установившаяся скорость на естественной характеристике
| (8) |
 .
. Критическое
скольжение при работе двигателя в низшей
ступени регулирования, обеспечивающей
согласно задания  (
( )
при
)
при
| (9) |
 .
. где  — коэффициент
— коэффициент
| (10) |
 .
.Решая квадратное уравнение, получаем
| (11) |
 .
.Сопротивление роторной цепи

Добавочное сопротивление, вводимое в роторную цепь

Установившееся
скольжение при работе двигателя на
реостатной характеристике и моменте
сопротивления  определяется уравнениями (5) – (7).
определяется уравнениями (5) – (7).
Установившаяся
скорость на реостатной характеристике
(низшая ступень регулирования  )
рассчитывается по (8).
)
рассчитывается по (8).
Определение диапазона регулирования
Максимальная
и минимальная скорости  ,
, .
Диапазон регулирования
.
Диапазон регулирования .
.
Определение кпд
КПД на естественной характеристике без учета постоянных потерь
| (12) |
 .
.КПД на низшей ступени регулирования без учета постоянных потерь
| (13) |
 .
.Определение жесткости характеристик
Жесткость характеристики
| (14) |
 .
.Результаты расчетов сведем в табл. 3
Таблица 3
N/N | Параметры | Результат | Ед. изм. |
Естественная характеристика | |||
1 | Критический
момент в двигательном режиме | 642,11 | Нм |
2 | Критическое
скольжение на естественной характеристике | 0,19 |
|
3 | Коэффициент | 0,43 |
|
4 | Коэффициент a для определения установившейся скорости | -2,24 |
|
5 | Установившееся
скольжение | 0,02 | Ом |
6 | Установившаяся
скорость при | 77,23 | 1/c |
7 | Приращение
скольжения для графика | 0,075 |
|
8 | Реостатная характеристика | ||
9 | Коэффициент a для определения критического скольжения | -7,46 |
|
10 | Критическое
скольжение | 7,32 |
|
11 | Сопротивление
роторной цепи | 7,39 | Ом |
12 | Добавочное
сопротивление, вводимое в роторную
цепь | 3,09 | Ом |
13 | Коэффициент a для определения установившейся скорости | -85,02 |
|
14 | Установившееся
скольжение | 0,64 | Ом |
15 | Установившаяся
скорость | 28,65 | 1/c |
16 | Определение диапазона регулирования | ||
17 | Максимальная
скорость | 77,23 | 1/c |
18 | Минимальная
скорость | 28,65 | 1/c |
19 | Диапазон
регулирования | 2,70 |
|
20 | Определение КПД | ||
21 | КПД
без учета постоянных потерь на высшей
ступени регулирования (естественная
характеристика) | 0,95 | |
22 | КПД
на низшей ступени регулирования | 0,36 | |
23 | Определение жесткости характеристик | ||
24 | Жесткость
естественной характеристики | -111,88 | Нм c |
25 | Жесткость
реостатной характеристики | -2,94 | Нм c |







Результаты расчетов характеристик сведены в табл. 4.
Таблица 4
N/N |
|
| Естественная | Реостатная |
|
| |||
1 | 0 | 78,53 | 0 | 0 |
2 | 0,05 | 74,61 | 368,78 | 12,43 |
3 | 0,1 | 70,68 | 555,27 | 24,71 |
4 | 0,15 | 66,75 | 628,21 | 36,85 |
5 | 0,2 | 62,83 | 641,8 | 48,85 |
6 | 0,25 | 58,9 | 627,12 | 60,69 |
7 | 0,3 | 54,97 | 600,2 | 72,38 |
8 | 0,35 | 51,05 | 568,93 | 83,93 |
9 | 0,4 | 47,12 | 537,12 | 95,32 |
10 | 0,45 | 43,19 | 506,52 | 106,57 |
11 | 0,5 | 39,26 | 477,88 | 117,66 |
12 | 0,55 | 35,34 | 451,44 | 128,6 |
13 | 0,6 | 31,41 | 427,19 | 139,4 |
14 | 0,65 | 27,48 | 405,01 | 150,04 |
15 | 0,7 | 23,56 | 384,74 | 160,54 |
16 | 0,75 | 19,63 | 366,19 | 170,88 |
17 | 0,8 | 15,7 | 349,19 | 181,07 |
18 | 0,85 | 11,78 | 333,59 | 191,12 |
19 | 0,9 | 7,85 | 319,23 | 201,02 |
20 | 0,95 | 3,92 | 305,99 | 210,76 |
21 | 1 | 0 | 293,75 | 220,36 |



По результатам расчета на рис.1 построены механические характеристики асинхронного двигателя при реостатном регулировании скорости.
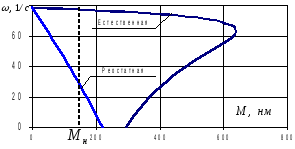
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при реостатном регулировании скорости