
3. Понятие оптимальной фильтрации — Физический факультет СПбГУ
Оптимальное выделение сигнала из шума можно проводить различными методами, в зависимости от того, какая ставится задача — обнаружение сигнала, сохранение формы сигнала и т.д. В каждом методе оптимальной фильтрации вводится понятие критерия оптимальности, согласно которому строится оптимальный алгоритм обработки сигнала [ 11].
Конкретный алгоритм оптимальной фильтрации будет существенно зависеть от того непериодический или периодический сигнал должен быть выделен (обнаружен) на фоне шума. По отношению к периодическому сигналу далее различаются ситуации: известна или нет его частота повторения. Ниже эти варианты задач будут рассмотрены последовательно.
3.1 Оптимальная фильтрация непериодического (одиночного) сигнала
Оценим возможную эффективность обнаружения непериодического сигнала при его аддитивной смеси с белым шумом. При формулировке задачи нахождения коэффициента передачи «оптимального» фильтра используются существенные требования относительно сигнала: во-первыхсчитается известной форма сигнала
При формулировке задачи нахождения коэффициента передачи «оптимального» фильтра используются существенные требования относительно сигнала: во-первыхсчитается известной форма сигнала
(3.1)
Т.е. сигнал имеет конечную длительность.
Определение оптимальности фильтра формулируется следующим образом:
Оптимальным фильтром в задаче обнаружения одиночного импульса конечной длительности является фильтр, обеспечивающий максимальное отношение пиковой мощности сигнала к мощности шума в момент окончания импульса.
Так, если сигнал имеет спектр
(3. 2)
2)
и длительность его , то функция
есть функция комплексно сопряженная функции спектральной плотности сигнала.
Можно показать [2], что комплексный коэффициент передачи оптимального фильтра, в приведенном выше смысле определяется так:
или
(3.3)
Не воспроизводя выкладки доказательства формулы (3.3) приведенных в ряде источников (например [ 2] ), остановимся на физическом смысле результата.
Замечая, что фазовая характеристика коэффициента передачи в (3.3) есть
видим, что — компенсирует фазовые сдвиги составляющих сдвиги спектра сигнала (3.2), что формирует «пик» импульса на выходе, а линейная функция — обеспечивает задержку этого «пика» на время длительности сигнала, т. е. этот пик приходится на момент окончания сигнала.. Можно сказать, что обеспечивается накопление полезного сигнала на интервале всего времени существования импульса.
Формула (3.3) устанавливает также, что модуль коэффициента передачи должен совпадать с модулем спектральной плотности функции заданного сигнала, т. е. оптимальный фильтр ослабляет спектральные составляющие шума тем сильнее, чем меньше модуль , В результате полная мощность шума на выходе фильтра оказывается меньшей, чем при равномерной АЧХ.
Наконец отметим, что произвольная константа размерна. При безразмерном имеет размерность обратной спектральной плотности сигнала.
3.2. Оценка отношения сигнал/шум при оптимальном фильтре
Будем исходить из приведенного выше выражения (3.3). Заметим, что для сигнала (импульса) сложной формы синтез оптимального фильтра является не простой задачей. По этому искомую оценку отношения сигнал/шум проведем на примере прямоугольного импульса.
(3. 4)
4)
Рис.1
Будем считать, что полезный сигнал представляет собой одиночный прямоугольный импульс (3.4) длительностью и с напряжением , изображенный на рис 1.
Его спектральная плотность описывается функцией
и сопряженная
следовательно, для данного импульса в соответствии с (3.3) имеем:
(3.5).
Такой коэффициент передачи может быть обеспечен схемой рис 2.
Рис.2
Содержащей идеальное интегрирующее звено (), линию задержки () и схему вычитания .
Найдем сигнал на выходе оптимального фильтра для рассматриваемого примера (=1)
(3. 6).
6).
Таким образом, импульс на выходе имеет треугольную форму с основанием 2t и максимальным значением U0 при t=t . Оценим теперь мощность шума на выходе этого оптимального фильтра. Используем формулы (3.3) и (3.5). Положим a =1 Будем считать шум ’ белым’.
Рис.3
Представим модуль оптимального коэффициента передачи в виде
Мощность шума на выходе фильтра в соответствии с (2.2 ) и (2.3) определиться так
(3.8).
Этот табличный интеграл [3] имеет значение: . Таким образом, искомая величина мощности шума равна:
откуда искомое отношение мощности сигнала к мощности шума для данного оптимального фильтра будет:
(3.10).
а для отношения амплитуд сигнал/шум
(3.
В заключение еще раз отметим, что оптимальный фильтр, построенный по указанному выше критерию, жестко связан с полезным входным сигналом: изменение полезного входного сигнала ведет к необходимости изменения коэффициента передачи фильтра.
3.3. Определение оптимальной полосы фильтра нижних частот в задаче выделения (обнаружения) одиночного сигнала на фоне белого шума
Учитывая сложность задачи синтеза оптимального фильтра , в результате которого находится его функция можно подойти к задаче по другому.
Сигналу выбирается тип АЧХ фильтра, сообразуясь с формой сигнала-импульса (точнее модулем его спектра). Например, для рассмотренного выше прямоугольного импульса выбирается фильтр НЧ, для импульса с высокочастотным заполнением- резонансный фильтр и т.д. Далее задача оптимизации ставится относительно выбора параметра фильтра — полосы его пропускания. Следуя этому подходу далее рассматривается возможность выделения полезного сигнала из белого шума не с помощью описанного выше оптимального фильтра, а с помощью линейного RC фильтра нижних частот.
Пусть полный входной сигнал U(t) выражается в виде суммы полезного входного сигнала и белого шума — случайного процесса, у которого спектральная плотность не зависит от частоты
(3.12).
В качестве фильтра нижних частот будем рассматривать интегрирующую цепочку (рис 4) — низкочастотный фильтр первого порядка с постоянной времени и коэффициентом передачи
(3.13).
Рис. 4
При исследовании прохождения шума через линейную систему будем использовать формулу (2.3) ,квадрат модуля коэффициента передачи
(3.14).
где — полоса пропускания рассматриваемого фильтра нижних частот по уровню 0. 707. Требуется найти полосу заданного фильтра нижних частот, обеспечивающую максимальное отношение сигнал/шум на выходе фильтра.
707. Требуется найти полосу заданного фильтра нижних частот, обеспечивающую максимальное отношение сигнал/шум на выходе фильтра.
Можно рассматривать прохождение через фильтр нижних частот полезного сигнала и шума раздельно, так как интегрирующая цепочка — линейная схема.
3.3.1. Прохождение полезного сигнала через однозвенный RC фильтр нижних частот
(3.15).
где коэффициент передачи интегрирующей цепочки определяется формулой (3.14) , а спектральная плотность полезного входного сигнала (3.4) была найдена как интеграл Фурье
(3.16).
Подставив в (3.15) формулы (3.16) и (3.13) и вычислив интеграл, получаем следующее выражение для сигнала на выходе фильтра
при
(3. 17)
17)
Рис 5.
Таким образом, выходной сигнал достигает своего максимального значения в момент окончания входного импульса t=t
(3.18).
Это выражение зависит от соотношения полосы частот фильтра (3.13) и полосы частот, занимаемой полезным сигналом , которая связана с длительностью прямоугольного импульса так 1/t . С учетом этого выражение (3.18) можно преобразовать следующим образом
(3.19).
Если полоса частот, занимаемая спектральной плотностью полезного входного сигнала, меньше полосы частот, определяемой коэффициентом передачи интегрирующей цепочки , то максимальное значение полезного сигнала на выходе интегрирующей цепочки (3.18) равно и не зависит от полосы фильтра при .
Если же полоса частот, занимаемая спектральной плотностью полезного входного сигнала, больше полосы частот, занимаемой коэффициентом передачи интегрирующей цепочки, , то разложив экспоненту в выражении (3. 18) в ряд, получаем следующее максимальное значение полезного сигнала на выходе интегрирующей цепочки
18) в ряд, получаем следующее максимальное значение полезного сигнала на выходе интегрирующей цепочки
В этом случае амплитуда полезного сигнала на выходе фильтра линейно зависит от полосы фильтра .
Мощность полезного входного сигнала, входящая в энергетическое отношение сигнал/шум, будет пропорциональна, таким образом, квадрату от полосы фильтра
Следовательно, если полоса фильтра перекрывает полосу полезного входного сигнала, то дальнейшее увеличение полосы фильтра не приводит к увеличению полезного выходного сигнала. Если же полоса фильтра уже полосы сигнала, то увеличение полосы фильтра приводит к увеличению мощности полезного выходного сигнала, пропорционально квадрату полосы фильтра.
3.3.2. Прохождение случайного сигнала (белого шума) через фильтр нижних частот
Для мощности шума на выходе фильтра с помощью формул (2.2) и (2.3) может быть получено следующее выражение
(3. 20),
20),
в котором положим — спектральная плотность мощности белого шума, а квадрат модуля коэффициента передачи определен формулой (3.14). Вычислив интеграл , получаем
(3.21),
где — ширина полосы фильтра по уровню 1/.
Отсюда следует, что мощность шума на выходе фильтра линейно зависит от полосы коэффициента передачи интегрирующей цепочки.
Используя полученные выражения для максимального значения выходного полезного сигнала (3.18) и мощности шума на выходе фильтра (3.21), можно получить выражение для энергетического отношения сигнал/шум на выходе фильтра нижних частот (RC-цепочки):
(3.22),
где
и (3.23)
Искомую величину оптимальной полосы для выбранного НЧ фильтра (3.13) и сигнала (3.4), обеспечивающей максимальное отношение сигнал/шум в момент t=t , найдем из условия максимума функции (3. 23), т.е .
23), т.е .
(3.24).
Функция имеет пологий максимум, ее график приведен на рис 6.
Рис. 6
Таким образом
И следовательно отношение пиковой мощности сигнала и мощности шума при оптимальной полосе НЧ фильтра равно
(3.25).
Отношение же амплитуды сигнала к «амплитуде» шума будет
(3.26).
Напомним, что использование фильтра с оптимальным коэффициентом передачи(3.5) приводило к отношению сигнал/шум по мощности равному (3.10)
(3.10).
Сравнивая (3.10) с (3.25), видим, что использование RC фильтра НЧ (3.13) с правильно выбранной полосой вместо фильтра с оптимальным коэффициентом передачи приводит к ухудшению соотношения сигнал/шум по мощности на 19 %.
(3.27),
и лишь на 10% по отношению амплитуд сигнал/шум
(3.28).
Т.о. для конкретного сигнала — прямоугольного импульса использование простого RC фильтра НЧ можно считать оправданным (целесообразным).
Качественно такой результат понятен. Если полоса фильтра уже полосы сигнала, то целесообразно увеличивать полосу фильтра, так как при этом мощность полезного сигнала на выходе растет пропорционально квадрату полосы, а мощность шума растет пропорционально первой степени полосы. Если полоса фильтра шире полосы сигнала, то целесообразно уменьшать полосу фильтра, так как при этом мощность полезного сигнала на выходе не меняется, а мощность шума уменьшается пропорционально первой степени полосы.
Далее найдем соотношение сигнал/шум для многозвенного RC — фильтра низкой частоты.
3. 4 Определение оптимальной полосы многозвенного фильтра нижних частот
4 Определение оптимальной полосы многозвенного фильтра нижних частот
Рассмотрим теперь задачу определения оптимальной полосы многозвенного фильтра с целью обеспечения максимального отношения сигнал/шум в момент окончания импульса. Импульс будем, как и раньше, считать прямоугольным.(3.4). Конкретно рассмотрим фильтр, собранный идентичных RC — звеньев, разделенных буферными каскадами.(рис 7).
Рис 7.
Коэффициент передачи такого фильтра описывается функцией
(3.29)
Если зафиксировать полосу пропускания этого фильтра на заданном уровне неравномерности , то эти два параметра, как это следует из (3.29), оказываются связанными уравнением
(3.30).
Отсюда очевидно, что для обеспечения постоянства общей заданной полосы фильтра при изменении числа звеньев n, постоянную необходимо изменить следующим образом
(3. 31).
31).
При увеличении числа звеньев n, будет увеличиваться крутизна спада АЧХ в области частот, выше заданной полосы . (рис 8).
Рис8.
Переходная характеристика h(t) для рассматриваемого фильтра (3.29) — реакция на включение ступеньки напряжения на входе определяется так:
(3.32).
где , как отмечено выше, если при увеличении числа каскадов n ставится требование =const ( на заданном уровне неравномерности ), то параметр каждого каскада должен изменятся в соответствии с формулой (3.31). Пример зависимости от n для n=1 и n=5 при одинаковой приведен на рис.8, а зависимость переходной характеристики h(t) также при n=1 и n=5 приведен на рис.9.
Оценим теперь уровень шума на выходе фильтра. Считаем шум на выходе белым, имеющим спектральную плотность мощности S0
(3. 33).
33).
Значение этого табличного неопределенного интеграла (3.36) известно [ 3].
(3.34).
При вычислении определенного интеграла (3.34) следует учесть, что функция равна нулю на верхнем () и на нижнем (-) пределах. Поэтому
(3.35).
Учитывая также необходимое изменение RC каждого каскада фильтра при увеличении n (при требовании =const) получаем интересующий количественный результат. В качестве примера приводим численные данные расчета мощности шума и напряжения шума для фильтров разных порядков (n).
и (3.36).
|
n |
1 |
2 |
3 |
4 |
5 |
6 |
|
0. |
0.78 |
0.85 |
0.9 |
0.95 |
1.01 |
|
|
0.5 |
0.61 |
0.72 |
0.81 |
0.91 |
1.025 |
 707
707
Полученные выше данные о прохождении импульсного сигнала и белого шума через n-звенныйфильтр низкой частоты позволит определить оптимальную полосу фильтра ( при заданной длительности импульса) и соотношение сигнал/шум на выходе рассматриваемого фильтра в момент окончания импульс t=t при оптимальном выборе его полосы . Как и в случае однозвенного фильтра строим функцию отношения величины полученного сигнала к «амплитуде» шума
Как и в случае однозвенного фильтра строим функцию отношения величины полученного сигнала к «амплитуде» шума
(3.37).
Здесь , -коэффициент изменения RC= каждого звена, при изменении порядка фильтра n (3.31)
Отношение , как функция ,имеет пологий max, зависящий от порядка фильтра n.
Так, например, для трехзвенного фильтра max достигается при , и значении . Для пятизвенного фильтра получаем и . Из этих значений определяется оптимальная величина параметра фильтра .
Т.о. искомое отношение амплитуд сигнал/шум с учетом коэффициентов Ki в соответствии с выражением (3.37) дает:
Для трехзвенного фильтра (3.38),
Для пятизвенного фильтра (3.39).
Сравнивая эти результаты с полученными ранее, видим, что повышение порядка фильтра дает худшее отношение сигнал/шум, чем для фильтра первого порядка (3. 13):
13):
и (3.40).
Поэтому, если «оптимальный» фильтр определяемый требованием (см(3.3)) заменяется фильтром RC с оптимально подбираемым параметром, то в рассматриваемом случае прямоугольного импульса лучшим оказывается простейший RC фильтр первого порядка .
Этому предпочтению можно дать следующие объяснения.
Во-первых, АЧХ RC фильтр первого порядка оказывается ближе к модулю спектра прямоугольного импульса, чем АЧХ фильтров более высоких порядков. Напомним, что для «оптимального» фильтра в соответствии с (3.3) оказывается, что его АЧХ совпадает с модулем спектра сигнала.
Во-вторых, как показано выше, значение обобщенного параметра , обеспечивающего наибольшее отношение мощности сигнала к мощности шума в конце импульса, увеличивается с повышением порядка фильтра. Так например, при n=1 значение , при n=3 имеем, что , а при n=5 обобщённый параметр .
Поэтому при заданной длительности импульса t полоса фильтра , требуется большей, для фильтра более высокого порядка, что также приводит к повышению шума.
Физически последнюю зависимость от n можно объяснить ростом группового запаздывания, т. е. требуемое максимальное отношение
к концу импульса достигается для больших n при больших значениях . Что при фиксированной длительности импульса означает большее значение . А это , естественно, увеличивает шум на выходе фильтра.
Отношение сигнал/шум: осмысление, измерение, улучшение (часть 1) — Astrophotography A to Z
Вероятно, вы слышали это раньше и, продолжив читать мою колонку, услышите еще сотню раз: «астрофотография — это отношение сигнал/шум» (ОСШ). Но что это значит, и может ли такое общее высказывание быть верным? Я думаю, очень даже может. Это всё об ОСШ? А как насчёт апертуры? А насчёт f-ratio (относительного фокусного расстояния)? Как насчёт «камера X лучше, чем камера Y»? Насчёт чёрно-белых камер в противовес цветным? Насчёт охлажденных по сравнению с неохлажденными и специализированных астрокамер против цифро-зеркалок? Что насчет рефракторов и рефлекторов? Что относительно темного неба по сравнению с городским? Хорошо, мой ответ на эти вопросы — да, это всё имеет значение, но всё это можно свести к какой-либо форме отношения сигнал-шум (хотя иногда и более сложной, чем просто численное значение ОСШ).
Итак, запуская эту колонку, мы собираемся говорить об ОСШ, что на него влияет и как его измерить. Хотите верьте, хотите нет, но вы можете проделать уйму тестов на своей фотокамере и добиться чётких, точных, повторяемых результатов. Из оборудования вам понадобится камера, крышка объектива и куча бумаги. Дополнительные принадлежности включают кусочек станиоли, круглую резинку, сменный объектив или телескоп (небольшой рефрактор тоже подойдет, хотя объектив всё-таки удобнее). Никакого особого программного обеспечения тоже не понадобится. Я пользуюсь Matlab, но вы с таким же успехом можете использовать бесплатную программу ImageJ. Даю слово, даже если вы убежденный противник техники, у вас получится. И тем не менее, прежде чем приступить к тестам, вы должны получить представление о том, что такое ОСШ и какие источники шума присутствуют в наших изображениях. Знание этого и понимание особенностей вашей камеры позволит выяснить, как получать лучшие изображения и максимально использовать время под звездами.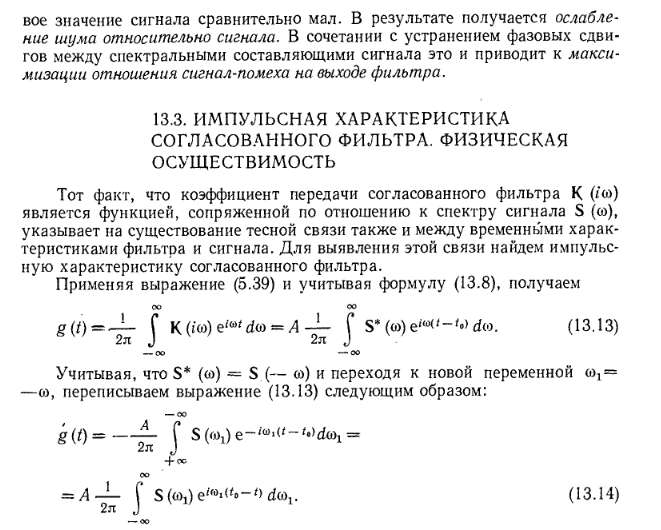
В этой части мы рассмотрим основной вопрос: что представляет собой ОСШ? В следующий раз узнаем, как измерить отдельные виды шума в вашей камере. После чего для каждого из типов шума сделаем определенные выводы – что с ним можно сделать при работе с изображениями.
ОСШ в идеальном мире
Когда мы делаем какое-либо фото, будь то M51 или изображение ребенка, фотоны проходят через объектив (линзу или зеркало) и бомбардируют сенсорную матрицу (CCD или CMOS). В матрице есть целый комплект отдельных сенсоров (которые формируют пиксели), и каждый из них делает одно и то же — пытается определить, сколько фотонов на него попало. Начинается это как аналоговый сигнал (например, напряжение), а затем преобразуется в цифровой прибором, который называется аналого-цифровым преобразователем (АЦП). Предположим, мы делаем фотографию темно-серого и светло-серого прямоугольника. За то время, пока затвор открыт, мы захватим 1 000 фотонов от темно-серого и 2 000 фотонов от светло-серого прямоугольника, и через объектив они попадут на сенсор. В идеальном мире мы каждый раз будем получать те же 1 000 и 2 000 фотонов и каждый раз интенсивность на нашем изображении получится 1 000 и 2 000. Каждый раз, когда мы это делаем, – т.е. каждый пиксель, направленный на прямоугольник, приводит к этому показателю. В этом идеальном мире у нас есть сигналы 1 000 и 2 000, и нет вообще никакого шума. Нет никакой изменчивости от пикселя к пикселю или от изображения к изображению, что и означает – нет шума.
В идеальном мире мы каждый раз будем получать те же 1 000 и 2 000 фотонов и каждый раз интенсивность на нашем изображении получится 1 000 и 2 000. Каждый раз, когда мы это делаем, – т.е. каждый пиксель, направленный на прямоугольник, приводит к этому показателю. В этом идеальном мире у нас есть сигналы 1 000 и 2 000, и нет вообще никакого шума. Нет никакой изменчивости от пикселя к пикселю или от изображения к изображению, что и означает – нет шума.
ОСШ представляет собой отношение сигнала (а если быть точным, то зачастую суммы сигнала и шума) к шуму. Т.е. для темно-серых прямоугольников ОСШ получается 1 000/0 и 2 000/0 для светло-серых. В обоих случаях ОСШ бесконечно. В идеальном мире у нас получилось идеальное изображение.
Шум в реальности
Однако действительность далеко не идеальна, и шум у вас будет всегда. Фактически, всегда будет несколько типов шума. Вот некоторые из них — шум считывания, шум темнового тока и дробовой шум (и объектный, и фоновый – свечение неба). И все они словно сговорились помешать вам выделить из фона крошечную дымку призрачной туманности. Но прежде чем приступить к детальному изучению шума, стоит пробежаться по визуальным примерам ОСШ. При подготовке этих примеров я использовал прекрасный, ультраглубокий снимок M51, сделанный космическим телескопом Хаббл, — обесцветил его, изменил размер и подрезал, чтобы создать очень симпатичное изображение с высоким ОСШ.
И все они словно сговорились помешать вам выделить из фона крошечную дымку призрачной туманности. Но прежде чем приступить к детальному изучению шума, стоит пробежаться по визуальным примерам ОСШ. При подготовке этих примеров я использовал прекрасный, ультраглубокий снимок M51, сделанный космическим телескопом Хаббл, — обесцветил его, изменил размер и подрезал, чтобы создать очень симпатичное изображение с высоким ОСШ.
Оригинальное изображение
Изображение с добавлением 5% гауссовского шума
Изображение с добавлением 10% гауссовского шума
Вверху оригинальное изображение, а ниже – два изображения, в которые я добавил гауссовский шум. В первом 5%-ный (добавлен в Фотошопе), во втором 10 %. Не нужно напрягаться, чтобы заметить, что верхняя картинка для нас предпочтительнее средней, а средняя лучше нижней. (Хотя, по правде, если бы хоть какой-нибудь из моих собственных снимков M51 был похож на нижний, я бы страшно гордился!).
С помощью Фотошопа (или ImageJ) можно вычислить ОСШ даже в отдельных частях этого изображения. Я выделил небольшой темно-серый участок, который расположен примерно в центре по вертикали и на ¾ по горизонтали, после чего измерил в Фотошопе средний сигнал и стандартное отклонение. Средний – это значит усредненное значение, а стандартное отклонение — мера шума (т.е. насколько выбранные пиксели могут отличаться о вышеупомянутой средней величины). В исходном изображении среднее значение получилось 85, стандартное отклонение 6. Это приводит к ОСШ для этой области 14,17 (85/6). На среднем изображении получилось 84,8 и 13,9 — ОСШ 6,1, и на нижнем изображении – 84,5 и 26,6 (ОСШ 3,18).
Заметьте, что сигнал в каждом из них – один и тот же. Т.е. интенсивность изображения не изменилась (примерно 85). Что изменилось, так это уровень шума (величина колебаний вокруг средней величины). А что случится, если мы ослабим сигнал? Хорошо, давайте вдвое ослабим сигнал на исходном изображении и добавим 5-процентный шум как на средней картинке. В результате мы получим нечто тусклое и зашумлённое. Оно выглядит однозначно хуже, чем 5% изображение, а некоторым покажется, что и хуже 10%-ного. Так или иначе, довольно тусклая картинка. Вот она.
В результате мы получим нечто тусклое и зашумлённое. Оно выглядит однозначно хуже, чем 5% изображение, а некоторым покажется, что и хуже 10%-ного. Так или иначе, довольно тусклая картинка. Вот она.
Среднее значение здесь 42.5 (половина от 85 – прежнего значения), а стандартное отклонение теперь 13, т.е. ОСШ — 3.27, почти такое же, как для случая 10% шума. Почему так? Выглядит это как паршивое изображение – до того тусклым, что многим захочется добавить увеличение или ISO на камере, чтобы вытянуть его и сделать поярче. Однако правда в том, что это – такое же хорошее изображение, как и яркий вариант с 10-процентным шумом.
Вот то же самое изображение после восстановления интенсивности (увеличения ее в 2 раза).
Если сравнить его это с оригинальной версией с 10%-ым шумом, различить их будет не так просто. Несомненно, точный рисунок шума здесь различен, но на глаз (и согласно математике), они дают одно и то же ОСШ. Интенсивность в рассматриваемой области теперь 85, и стандартное отклонение — 25. 8 для ОСШ 3.29. (Примечание: не обращайте внимания на некоторое различие чисел 3.27 и 3.29. Это просто погрешность округления)
8 для ОСШ 3.29. (Примечание: не обращайте внимания на некоторое различие чисел 3.27 и 3.29. Это просто погрешность округления)
Примечание: Здесь я вычислял ОСШ лишь как простой коэффициент. Вы будете часто встречать, что его выражают в dB (децибелах). Чтобы пересчитать в децибелы, просто возьмите 20*(lg отношения сигнал/шум), где lg — десятичный логарифм (во встроенном калькуляторе Windows он обозначается log). Так, если у нас интенсивность сигнала 2000 и шум 2, получится 20*lg(2000/2), т.е. 60 децибелов.
Резюме: ОСШ
Резюмируя, нужно помнить, что у ОСШ есть два компонента: сигнал и шум. Если мы сохраняем сигнал постоянным и делим шум пополам, мы удваиваем ОСШ. Если сохраняя шум, мы удваиваем сигнал, мы удваиваем ОСШ. Если мы делим сигнал пополам, но сокращаем шум до четверти первоначального, мы также удваиваем ОСШ. Это – отношение, и улучшение ОСШ можно свести или к повышению сигнала, или к понижению шума.
Типы шумов
Шум считывания
Каждый раз, когда вы считываете изображение с камеры, в изображение включается некоторый шум. Даже если нет никакого сигнала (никакого света, никакого заметного темнового тока), у вас все равно будет шум в изображении, оно всё равно не будет идеальным. Этот шум называют шумом считывания. Его генерирует и электроника вашей камеры в целом, и непосредственно электроника сенсора.
Даже если нет никакого сигнала (никакого света, никакого заметного темнового тока), у вас все равно будет шум в изображении, оно всё равно не будет идеальным. Этот шум называют шумом считывания. Его генерирует и электроника вашей камеры в целом, и непосредственно электроника сенсора.
Шум считывания включает несколько разновидностей. В идеале у него нет никакой структуры. Т.е. нет никакого фиксированного рисунка – это просто равномерный уровень фона, гауссовский шум. Если представить его как звук, это будет простое шипение без каких-либо оттенков, щелчков, треска и т.д. Визуально этот вид шума легко не заметить, и при сложении изображений уровень простого гауссовского шума снижается (во сколько раз он уменьшается, показывает квадратный корень из числа сложенных изображений).
Как бы то ни было, большинство камер не идеальны. У некоторых есть устойчивая пространственная структура шума. Каждый раз, когда вы делаете снимок, в изображении присутствует отчетливый узор из полос, волн и т. д. Если вы стремитесь к чему-то более-менее оптимальному, то это оно и есть, т.к. рисунок абсолютно повторяем. Да, он будет у вас в каждом световом кадре, будет в каждом темновом (с закрытой крышкой объектива и реальной выдержкой) или шумовом кадре (с закрытой крышкой объектива и минимальной выдержкой), но именно поэтому удалить этот шум можно стандартными приемами предварительной обработки.
д. Если вы стремитесь к чему-то более-менее оптимальному, то это оно и есть, т.к. рисунок абсолютно повторяем. Да, он будет у вас в каждом световом кадре, будет в каждом темновом (с закрытой крышкой объектива и реальной выдержкой) или шумовом кадре (с закрытой крышкой объектива и минимальной выдержкой), но именно поэтому удалить этот шум можно стандартными приемами предварительной обработки.
Некоторые камеры дают на изображении шум определенной частоты (например, отдельные вертикальные полосы в 100 пикселей), положение которых меняется от изображения к изображению. Вот с этим иметь дело уже сложнее. У каждого кадра будет свой узор шума – не найдется и двух одинаковых. В световых и темновых кадрах не будут повреждены одни и те же пиксели, из-за чего стандартная предварительная обработка окажется неэффективной (она не будет вычитать шум). Всё, что вы реально можете сделать с этим видом шума, — это или попытаться отфильтровать его позже, или попробовать сложить достаточное количество кадров для того, чтобы в итоговом изображении шум окончательно пропал (каждый кадр вносит шум в своем месте). К сожалению, часто для этого требуется большое количество снимков. Еще хуже, что те же самые проблемы будут при подготовке темновых или шумовых снимков. Понадобится много темновых или шумовых кадров, чтобы заставить этот узор исчезнуть. Если не сделать этого, то при их вычитании вы лишь внесете шум в свои световые снимки.
К сожалению, часто для этого требуется большое количество снимков. Еще хуже, что те же самые проблемы будут при подготовке темновых или шумовых снимков. Понадобится много темновых или шумовых кадров, чтобы заставить этот узор исчезнуть. Если не сделать этого, то при их вычитании вы лишь внесете шум в свои световые снимки.
И, наконец, коснемся еще одного вида. Шум «соль-перец» похож на яркие и темные пятна, разбросанные по всему снимку. Эти пятна имеют тенденцию меняться от изображения к изображению (я не говорю о «горячих», т.е. сбойных пикселях). У некоторых камер есть с этим реальные проблемы, и если у вашей камеры тоже, нужно будет принять меры к их устранению. Очень помогает сложение с учетом стандартного отклонения на всем изображении (или «sigma-clip»).
Дробовой шум
Если вы – доктор на полях прусских сражений конца 1800-х, ожидающий появления очередного пациента, которого лягнула лошадь, у вас есть нечто общее с астрофотографом, ожидающим (хотя и недолго), когда еще один фотон от галактики достигнет сенсора. Вы оба думаете о процессах Пуассона. Ладно, непосредственно о них вы, вероятно, не думаете, но парень по фамилии Борткевич думал. Иногда он видел людей, пострадавших от лошадиного копыта, по утрам, другие входили под вечер, а временами он проводил целые дни, не видя ни одного. Дело в том, что есть некоторая вероятность события (лягания лошадью или попадания фотона от галактики на ваш сенсор), и т.к. это лишь вероятность, а не безусловность, всегда будут отклонения во временнОм промежутке между событиями. Такие отклонения были описаны в начале 18 века французским математиком Пуассоном.
Вы оба думаете о процессах Пуассона. Ладно, непосредственно о них вы, вероятно, не думаете, но парень по фамилии Борткевич думал. Иногда он видел людей, пострадавших от лошадиного копыта, по утрам, другие входили под вечер, а временами он проводил целые дни, не видя ни одного. Дело в том, что есть некоторая вероятность события (лягания лошадью или попадания фотона от галактики на ваш сенсор), и т.к. это лишь вероятность, а не безусловность, всегда будут отклонения во временнОм промежутке между событиями. Такие отклонения были описаны в начале 18 века французским математиком Пуассоном.
Если вы делаете изображение в течение секунды, может оказаться, что какой-то пиксель в сенсоре поразят 10 фотонов от DSO, а до другого доберутся 12. Возьмите третий пиксель, и получите 9. Такие отклонения всегда возникают на световом пути. Их и называют дробовым шумом (другое название – фотонный шум), который подчиняется распределению Пуассона.
Избежать дробового шума невозможно, при этом его величина растет как квадратный корень из интенсивности. Т.е. чем более яркий объект вы снимаете, тем больше получаете шума. Звучит неприятно, но в действительности это не проблема, поскольку сигнал тоже усиливается. Если, например, в одном случае на сенсор попадает 100 фотонов, а в другом 10 фотонов, то ОСШ для первого случая в 3 раза выше. Несмотря на отрицательное влияние возрастающего шума, положительный эффект от более высокого сигнала перевешивает (ОСШ будет N/sqrt (N)).
Т.е. чем более яркий объект вы снимаете, тем больше получаете шума. Звучит неприятно, но в действительности это не проблема, поскольку сигнал тоже усиливается. Если, например, в одном случае на сенсор попадает 100 фотонов, а в другом 10 фотонов, то ОСШ для первого случая в 3 раза выше. Несмотря на отрицательное влияние возрастающего шума, положительный эффект от более высокого сигнала перевешивает (ОСШ будет N/sqrt (N)).
Итак, мы можем проигнорировать дробовой шум, правильно? Неправильно. У него есть два источника. Мы не против дробового шума непосредственно от DSO, но как насчет дробового шума от свечения неба (skyglow)? Сенсор ведь не знает, откуда к нему поступают фотоны – от галактики или от свечения неба – оба дают дробовой шум. Вот что особенно отвратительно в свечении. Если бы дело было только в осветлении изображения, всё, что надо было бы сделать – это поднять точку черного и отключить свечение. Но свечение неба понижает ОСШ, вводя в изображение дробовой шум и не вводя сигнала. Это — одна из основных причин (плюс отсутствие возможности понижения эффективного динамического диапазона матрицы), по которой свечение неба настолько вредно.
Это — одна из основных причин (плюс отсутствие возможности понижения эффективного динамического диапазона матрицы), по которой свечение неба настолько вредно.
Темновой шум
Закройте объектив камеры крышкой и сделайте несколько снимков с разной выдержкой. Вы заметите, что изображение тем ярче, чем больше выдержка. Это из-за темнового тока. Интенсивность удваивается, когда вы удваиваете длительность экспозиции, и, кроме того, почти удваивается каждые 6 градусов по шкале Цельсия. Еще вы обнаружите, что некоторые пиксели светлеют быстрее других («горячие» пиксели светлеют очень быстро), в результате чего появляется узор стабильного пространственного шума. Это к вопросу о том, зачем мы обычно делаем темновые снимки, используя ту же самую длительность экспозиции и температуру. Нам нужно, чтобы шумовой узор в темновом кадре был точно таким же, как и в световом. Затем мы вычтем один из другого и получим более отчетливый световой кадр.
Большинство читающих эту статью уже знает о темновых кадрах, но некоторые, возможно, не задумывались об истинном смысле темнового тока. Помните дробовой шум? Фотоны поступают с некоторой вероятностью, поэтому однозначно сказать, сколько их будет, мы не можем, причем величина отклонения в их количестве пропорциональна уровню сигнала. То же самое верно и для темнового тока. Чем выше темновой ток, тем больше отклонений будет при считывании отдельного кадра. Поэтому если мы хотим получить очень хорошее значение среднего темнового тока (чтобы затем вычесть его из нашего светового снимка), нужно усреднять еще более темные кадры.
Помните дробовой шум? Фотоны поступают с некоторой вероятностью, поэтому однозначно сказать, сколько их будет, мы не можем, причем величина отклонения в их количестве пропорциональна уровню сигнала. То же самое верно и для темнового тока. Чем выше темновой ток, тем больше отклонений будет при считывании отдельного кадра. Поэтому если мы хотим получить очень хорошее значение среднего темнового тока (чтобы затем вычесть его из нашего светового снимка), нужно усреднять еще более темные кадры.
Таким образом, ответ на вопрос: «Сколько темновых кадров я должен использовать?» зависит от уровня темнового тока. Если у вас он большой, если вы используете более долгие темновые кадры, и изображение становится значительно ярче и больше зашумляется, снимков понадобится больше. Если вы не наберёте достаточно темновых снимков, то при предварительной обработке изображения просто введёте шум в световые кадры. В суммарном темновом снимке любое отклонение от ожидаемого значения темнового тока на данном пикселе означает, что вы будете вводить эту разность (величину отклонения) в каждый световой снимок.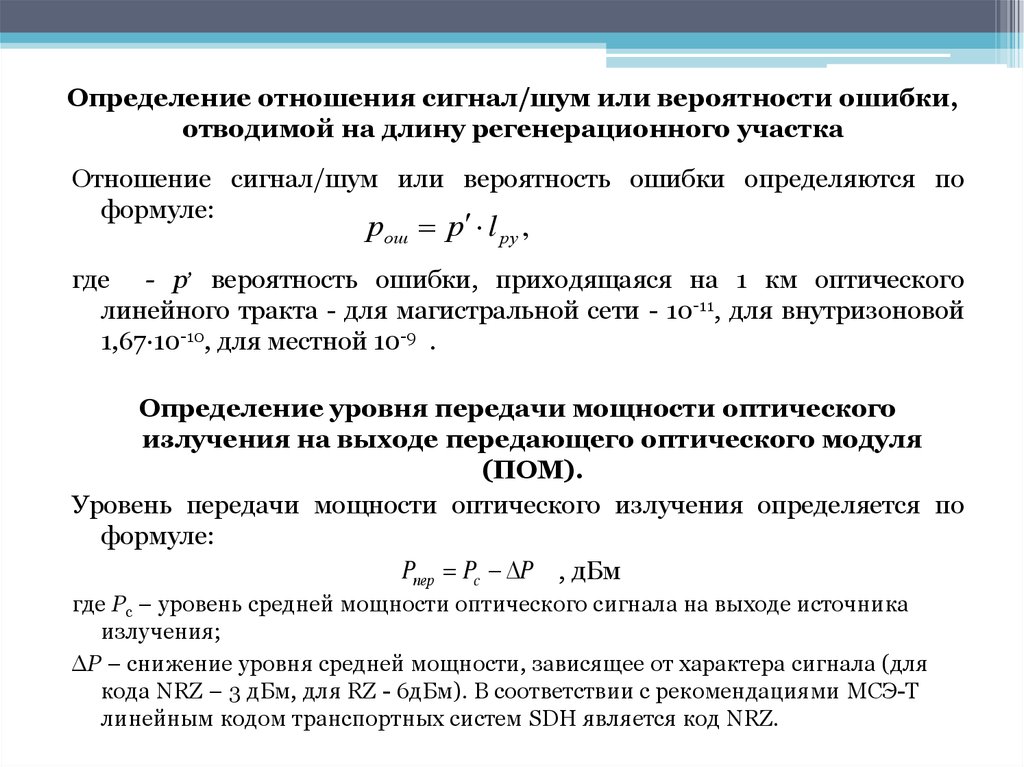
Ошибка квантования
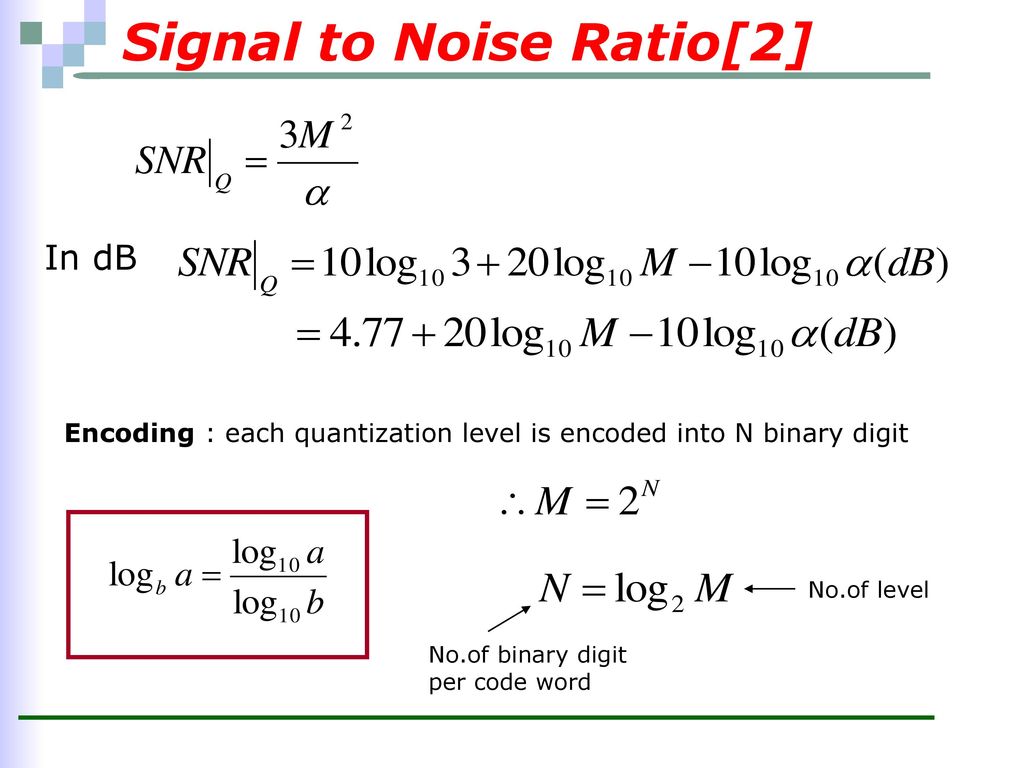
Когда мы считываем напряжение с сенсора, это аналоговый сигнал. Чтобы превратить его в цифровой, используется аналогово-цифровой преобразователь (АЦП). Предположим, у нас есть 8-битный АЦП. Установив его, мы можем записать 256 градаций интенсивности (2 в 8-й степени). Предположим далее, что наша ПЗС-матрица может накопить до насыщения 10 000 электронов. Если мы хотим использовать весь динамический диапазон ПЗС-матрицы, то должны установить АЦП так, чтобы каждое деление шкалы соответствовало примерно 25 фотонам (10 000/256). Так, 10 на АЦП означает, что было захвачено примерно 250 фотонов, а 11 — около 275.
Не нужно много усилий, чтобы заметить здесь некоторую проблему. Для нас теперь нет разницы между 250 фотонами и 251, 255 или 260 фотонами. Им всем соответствует одно и то же значение. Эту проблему называют ошибкой квантования. Она приводит к одному и тому же значению сходные, но не идентичные значения интенсивности (например, едва заметные тонкие различия в рукавах галактики, которые вы надеетесь разделить). Когда это происходит, информация теряется, и разделить их уже невозможно (по крайней мере, на одном кадре).
Когда это происходит, информация теряется, и разделить их уже невозможно (по крайней мере, на одном кадре).
Ошибка квантования появляется, когда уровней интенсивности оказывается больше, чем чисел для их запоминания. Современные специализированные астрокамеры не страдают от ошибки квантизации, но цифро-зеркалки и лунные/планетарные камеры все еще грешат этим. Например, если у вас ПЗС-матрица с отличной накопительной ёмкостью 10 000 электронов и 12-битный АЦП, который дает 4 096 уровней интенсивности, потенциально проблема у вас уже есть. В данном случае усиление системы при использовании полного диапазона матрицы будет примерно 2,5 e-/АЦЕ. Т.е. каждый шаг интенсивности (Аналогово-Цифровая Единица) составит 2,5 электрона. Иначе говоря, вам нужно теоретически задать системное усиление в 1 e-/АЦЕ и подобрать динамический диапазон, который позволит уйти от ошибки квантования. Вы сможете заполнить АЦП 4 096 электронами, но повода волноваться о какой-либо ошибке квантования у вас не будет. Камеры, которые дают возможность изменять системное усиление (например, цифро-зеркалки — они называют это ISO), позволяют изменять диапазон в обе стороны.
Камеры, которые дают возможность изменять системное усиление (например, цифро-зеркалки — они называют это ISO), позволяют изменять диапазон в обе стороны.
Перед тем как оставить ошибку квантования в покое, я должен отметить еще одну вещь. Не стоит относиться слишком сурово к камерам с 12-битным АЦП и высокой емкостью — больше 4 096 электронов. Честно говоря, вам пришлось бы сильно напрячься, чтобы заметить хоть какую-то разницу между сенсором с емкостью захвата 10 000 е- и 12-битным АЦП и аналогичным, но с подключением 16-битного АЦП (у которого, кстати, 65 536 шагов интенсивности). Почему? Шум. Разрешение ограничивается шумом. Скажем, у нас есть сенсор 10 000 е- со значением шума 10 е-. Максимальное ОСШ (иначе называемое динамическим диапазоном) – 1000 (или 60 децибелов). Теперь наш 12-битный АЦП с 4 096 уровнями интенсивности (72 децибела) не выглядит таким уж плохим. Будь у нас тот же самый 10 000-электронный сенсор, но с величиной шума 1 е-, ОСШ было бы 10 000 (80 децибелов), и проблема возникла бы снова. Смысл в том, что наличие определенного количества электронной емкости вовсе не означает, что вы можете точно сказать, насколько это хорошо в плане шума. Неопределенность вызвана тем, что при любом возможном параметре у вас не должно быть дискретных значений в АЦП. Лично я ни минуты бы не волновался, если бы мой 16-битный АЦП (65 536 шагов) был подключен к ПЗС-матрице с емкостью 100 000 е-.
Смысл в том, что наличие определенного количества электронной емкости вовсе не означает, что вы можете точно сказать, насколько это хорошо в плане шума. Неопределенность вызвана тем, что при любом возможном параметре у вас не должно быть дискретных значений в АЦП. Лично я ни минуты бы не волновался, если бы мой 16-битный АЦП (65 536 шагов) был подключен к ПЗС-матрице с емкостью 100 000 е-.
Резюме: шум
У вас будет шум. Будет несмотря ни на что. Некоторые уловки, конечно, позволят минимизировать его. Большую часть шума даёт камера, поэтому ее выбор является определяющим фактором – ведь нужно, чтобы шум был и низким по уровню, и вёл себя хорошо. В Части 2 мы рассмотрим, как это оценить. Другую часть шума даст вам объект фотографирования – и сама цель, и небо. Шум цели можно проигнорировать (вы никогда ничего с ним не сделаете), но шум неба – это то, с чем можно бороться. Мы поговорим об этом в Части 3.
Сигнал
Добиться увеличения ОСШ можно или понижая шум, или повышая сигнал.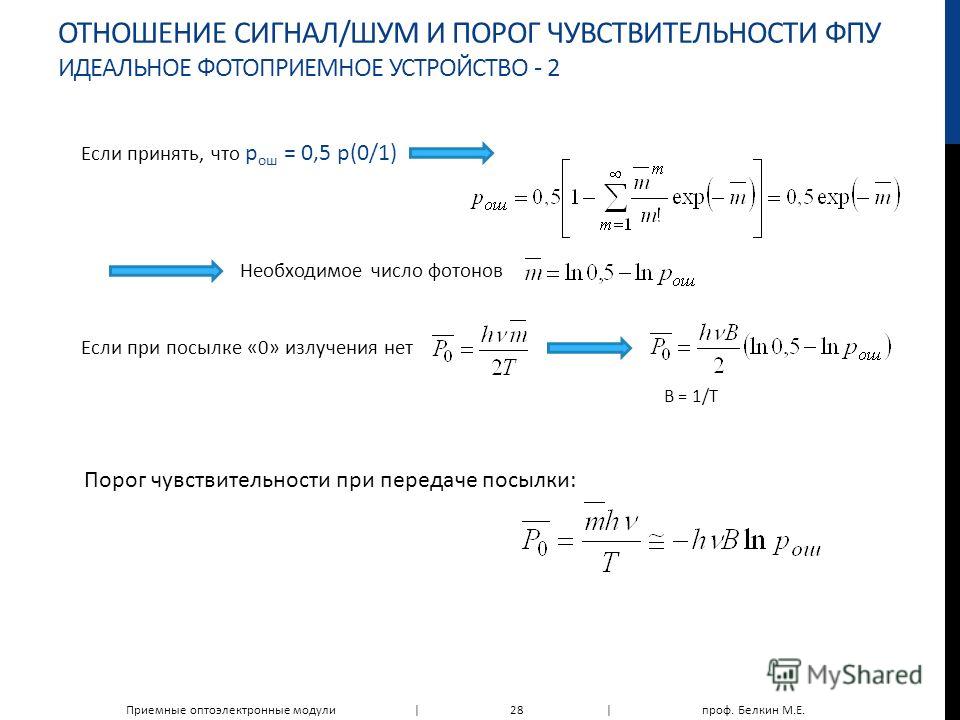 При этом имеет значение, откуда сигнал поступает, и насколько вы можете его усилить. Ответ на первый вопрос очевиден. Сигнал поступает из тусклой размытости, которую вы пытаетесь запечатлеть на картинке (и все дела!). Исходя из этого вы должны понимать, что она станет тусклой размытостью на пикселях вашего сенсора. Обсудим некоторые вещи, которые влияют на величину получаемого сигнала.
При этом имеет значение, откуда сигнал поступает, и насколько вы можете его усилить. Ответ на первый вопрос очевиден. Сигнал поступает из тусклой размытости, которую вы пытаетесь запечатлеть на картинке (и все дела!). Исходя из этого вы должны понимать, что она станет тусклой размытостью на пикселях вашего сенсора. Обсудим некоторые вещи, которые влияют на величину получаемого сигнала.
Первой является апертура вашего телескопа (чем она больше, тем больше фотонов она собирает и передает на сенсор). Или даже focal ratio (отношение фокусного расстояния к апертуре), с которым вы работаете. На эту тему в интернете было много написано, кое-что я уже писал в своем блоге и со временем рассмотрю здесь. И всё же если говорить о протяженных объектах, focal ratio действительно определяет, какая часть сигнала достигнет данного пикселя. Если при постоянной апертуре вы меняете focal ratio (изменяя фокусное расстояние), вы идете на компромисс между сигналом и разрешением. Длинные фокусные расстояния растягивают изображение на большее количество пикселей, что дает более высокое разрешение, но уменьшает количество света, попадающее на каждый пиксель.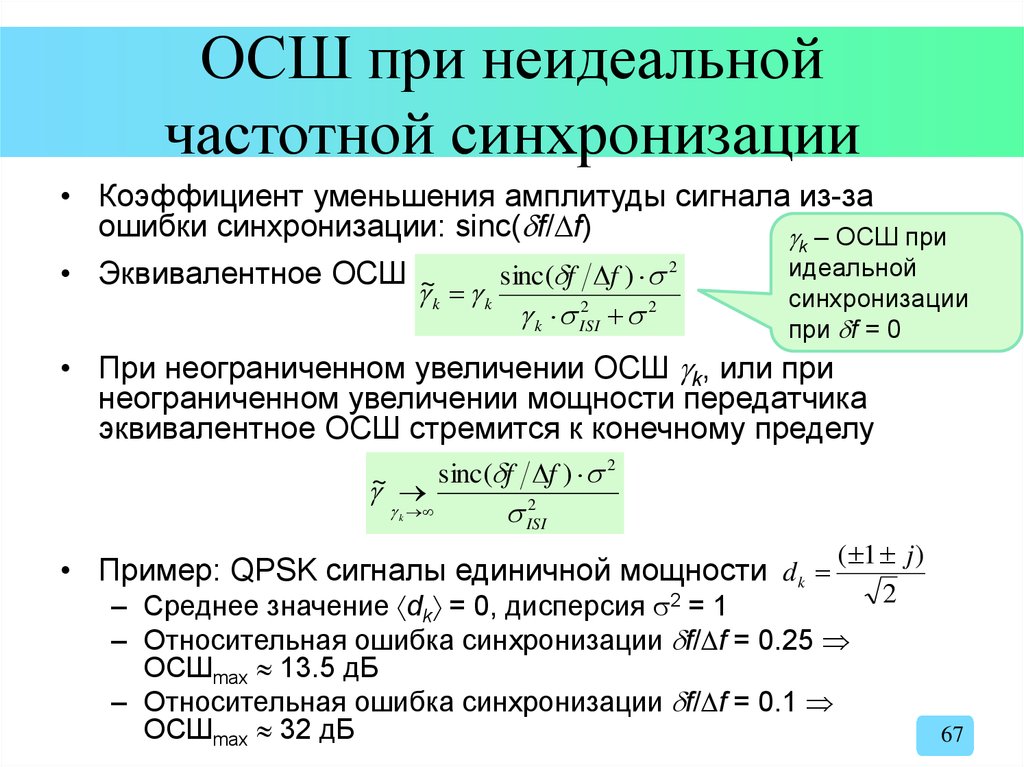 Смысл «мифа о focal ratio» в том, что при наличии вышеописанного «шума считывания» добавленное разрешение даёт мало или вообще ничего. Но как бы то ни было, применение более длинных фокусных расстояний (более высоких focal ratio) помогает уменьшить шум. Детально мы обсудим это в другой раз. Что здесь важно, так это вот что – если вы хотите повысить ОСШ в каком-то конкретном пикселе (правда, если вы более-менее сообразительны, то не можете хотеть этого, но если задаться целью…), вы можете понизить focal ratio – увеличивая апертуру при неизменном фокусном расстоянии или уменьшая фокусное расстояние при постоянной апертуре.
Смысл «мифа о focal ratio» в том, что при наличии вышеописанного «шума считывания» добавленное разрешение даёт мало или вообще ничего. Но как бы то ни было, применение более длинных фокусных расстояний (более высоких focal ratio) помогает уменьшить шум. Детально мы обсудим это в другой раз. Что здесь важно, так это вот что – если вы хотите повысить ОСШ в каком-то конкретном пикселе (правда, если вы более-менее сообразительны, то не можете хотеть этого, но если задаться целью…), вы можете понизить focal ratio – увеличивая апертуру при неизменном фокусном расстоянии или уменьшая фокусное расстояние при постоянной апертуре.
С этим связано и второе, о чем стоит упомянуть, – это светопропускание вашего телескопа. Давайте рассмотрим Ньютон с простым алюминиевым покрытием, которое даёт примерно 87% отраженного света. При отражении от двух поверхностей (каждая по 87%) мы получаем полную пропускную способность 0.87*0.87, т.е. около 76 %. Если же говорить о зеркале 8″ f/5 с центральным экранированием 2,5″, то полная пропускная способность понизится до 66 % попавшего в трубу света.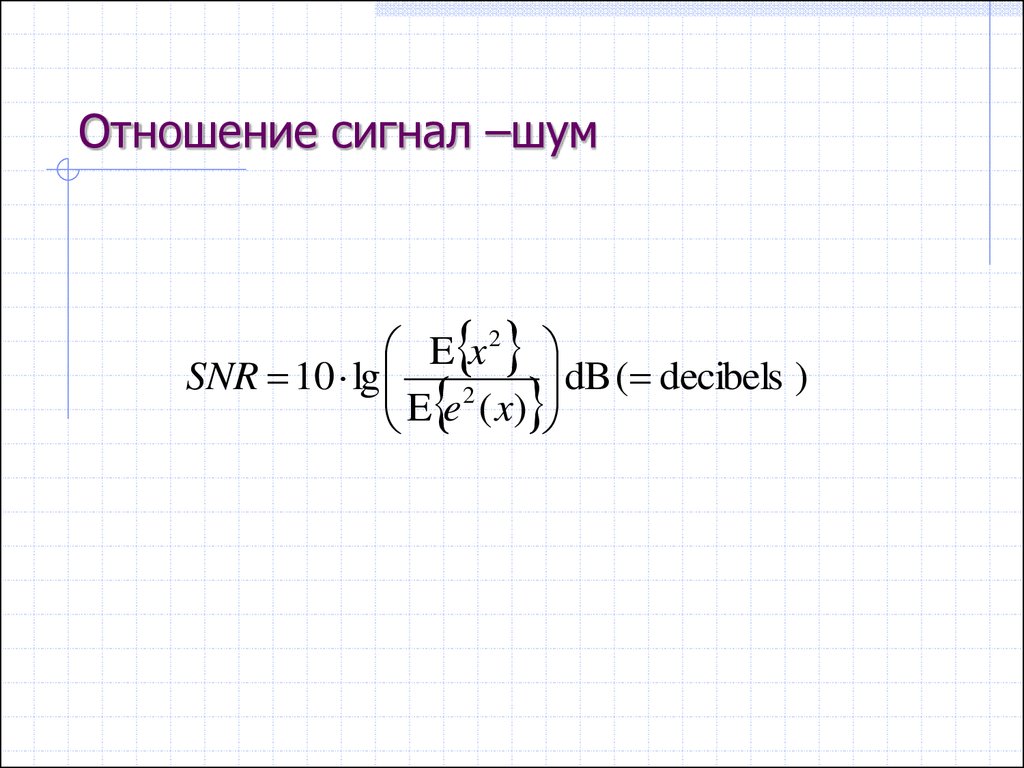 Это значит, что с точки зрения светопропускания мы работаем с эквивалентом 6,4″ телескопа. А если бы покрытие было 95%? До учета экранирования у нас будет 90 %, а с учетом — 80%-ная эффективность, т.е. эквивалент идеального 7,1″ телескопа. Гммм… т.е. если заново покрыть старые зеркала чем-нибудь просветляющим, мы получим 14%-ное усиление сигнала.
Это значит, что с точки зрения светопропускания мы работаем с эквивалентом 6,4″ телескопа. А если бы покрытие было 95%? До учета экранирования у нас будет 90 %, а с учетом — 80%-ная эффективность, т.е. эквивалент идеального 7,1″ телескопа. Гммм… т.е. если заново покрыть старые зеркала чем-нибудь просветляющим, мы получим 14%-ное усиление сигнала.
Третья вещь, которую стоит принять во внимание, это квантовая эффективность (КЕ) вашей камеры. КЕ связана с отношением зарегистрированных фотонов к общему количеству фотонов, достигших датчика. Если у вас одна камера с КЕ 40%, а другая с КЕ 80%, и все остальные параметры одинаковы, то у камеры с большей КЕ отношение сигнал/шум вдвое выше. Но если камера у вас одна, то можно относиться к повышению КЕ, как к увеличению апертуры вашего телескопа. Работая с камерой КЕ=80% на 80-миллиметровом АПО, вы получите примерно то же, что и на КЕ=40% и 113-миллиметровом АПО (при равных показателях шума и одинаковом фокусном расстоянии). Кроме того, есть еще один подход к повышению ОСШ. Если вы хотите увеличить количество захваченных фотонов и повысить сигнал относительно шума, вдвое увеличьте время экспозиции на сенсоре с более низким КЕ.
А вот темноту неба мы здесь учитывать не будем. Люди часто думают о ней как о повышении сигнала, поскольку при взгляде на темное небо DSO кажутся однозначно более яркими. Но разве фотоны M51 знают, в городе вы находитесь или в сельской местности? Нет, конечно. От M51 к вам приходит одно и то же число фотонов, и никакие фотоны городского света их не отклоняют. Нет, сигнал тот же самый, разве что уровень фона поднялся, из-за чего выделить сигнал стало сложнее.
Всё об ОСШ
Помните, в начале я сказал, что всё сводится к ОСШ? Апертура рулит, верно? Что есть, то есть – она повышает ОСШ. Прикрепите камеру к 3″ или 30″ телескопу, у неё всё равно будет один и тот же шум считывания и тот же тепловой шум. Однако на 30″ телескопе на камеру попадает в сто раз больше фотонов, чем когда она работает с 3″ телескопом (в рамках обсуждения допустим, что фокусные расстояния равны). Вот это на самом деле – повышение сигнала.
ОК, это было несложно. Как насчет темного неба по сравнению с городским? На темном небе контраст выше, что позволяет увеличить выдержку, верно? А как там с ОСШ? Здесь две вещи играют роль. Во-первых, мы можем рассмотреть случай, когда длительность экспозиции в обоих случаях одинакова. Тогда тепловой шум и шум считывания будут примерно равны, и число фотонов от DSO тоже одинаково. Т.е. сигнал и два компонента шума не меняются. Но дробовой шум в обоих случаях различен. Камера не отличает свечение неба от света DSO, т.к. фотоны от неба – они и есть фотоны от неба. В городской местности на сенсор легко может попадать в четыре раза больше фотонов от свечения неба, ибо мы снимаем в городе. Мы, конечно, можем сместить точку черного, чтобы затемнить небо, но все эти «дополнительные» фотоны уже внесли дополнительный дробовой шум. На деле четырёхкратное свечение приведет к удвоению дробового шума. Под городским небом дробовой шум от свечения неба – как правило, доминирующего источника шума – оставляет позади шум чтения и тепловой шум. Итого, при постоянном сигнале мы удвоили шум и вдвое уменьшили наше ОСШ.
Черно-белые по сравнению с цветными камерами? Цветные фильтры сокращают сигнал до трети (и даже меньше) того, что вы получили бы без них. Сигнал сокращается, а шум остается на том же уровне. Выбор камеры? Повысьте КЕ, и вы усилите сигнал. Понизьте шум, и вы – стоило ли говорить? – понизите шум. Так или иначе, но вы повысили ОСШ.
А что дальше?
Надеюсь, большинство записей в этой колонке не будут такими длинными, как эта. Просто чтобы дать отправную точку, понадобилось довольно много информации. Вторая часть будет инструкцией по измерению шума вашей камеры. В реальности это намного проще, чем звучит. А в Части 3 мы рассмотрим, что можно сделать для улучшения ОСШ в ваших изображениях, и насколько размышления об ОСШ могут изменить ваш подход к фотографии.
Ясного неба! Craig
Craig Stark автор множества публикаций по техники астрофотографии в журналах Sky and Telescope, Astronomy и AstroPhoto Inside. Разработчик программного обеспечения для астрофотографии — Nebulosity, PHD Guiding, DRSL Shuter. Сайт автора www.stark-labs.com
-
Адаптированный перевод с английского RealSky.ru
- Публикуется с разрешения автора.
- Оригинальная версия статьи на www.cloudynights.com
Калькулятор отношения сигнал-шум
Создано Komal Rafay
Отредактировано Dominik Czernia, PhD и Jack Bowater
Последнее обновление: 02 февраля 2023 г.
Содержание:- Что такое SNR?
- Калькулятор отношения сигнал/шум
- Что такое хорошее отношение сигнал/шум?
- Как рассчитать отношение сигнал/шум? Формула SNR
- Требования к отношению сигнал/шум и пример отношения сигнал/шум
- Часто задаваемые вопросы
Наш калькулятор отношения сигнал-шум — это инструмент, который поможет вам найти отношение полезного сигнала к фоновому шуму . Вы можете задаться вопросом: » Почему вычисление этого отношения так важно? » Вы получите ответ через некоторое время, но перед этим вам нужно знать, что такое SNR и каково хорошее отношение сигнал/шум.
Продолжайте читать, чтобы узнать о некоторых существенных требованиях к отношению сигнал/шум и о разнице между низким и высоким отношением сигнал/шум.
Что такое ОСШ?
SNR означает отношение сигнал/шум. Это отношение является мерой силы полезного сигнала к текущему уровню фонового шума . Ниже приведены некоторые примеры соотношения сигнал-шум, которые мы используем в реальном мире:
- Определение уровня изотопов в ледяных кернах;
- Измерение эффективности биохимической сигнализации клетки;
- Определение чистоты звука автомобильного усилителя; и
- Расчет пропускной способности и пропускной способности канала связи 📡.
Можем ли мы предложить взглянуть на калькулятор пропускной способности, чтобы получить четкое представление о том, что такое пропускная способность и Мбит/с!
Наш калькулятор отношения сигнал/шум представляет собой удобный инструмент, который вычисляет соотношение между уровнем полезного сигнала и допустимым фоновым шумом .
Теперь давайте вернемся к нашему первоначальному вопросу: » Почему вычисление этого отношения так важно? »
Представьте, что вы разговариваете со своим другом , и все идет как по маслу. Теперь представьте, что приходит гораздо больше людей, и каждый разговаривает с кем-то, пока вы пытаетесь поговорить со своим другом. Это по-прежнему мило, но твой друг все больше и больше обрывается. Теперь представьте, что вы на концерте и хотите поболтать со своим другом. Кажется утомительным и утомительным повторять то, что вы говорите, из-за громкой музыки, которая для вас является фоновым шумом.
Ваш голос здесь сигнал, а концертная музыка шум .
Наш калькулятор позволяет рассчитать отношение сигнал/шум пятью различными способами.
В инструменте у вас есть возможность выбрать тип SNR ; какой бы тип вы ни выбрали, вам необходимо ввести:
- Величина сигнала ; и
- Величина шума .

С каждым типом связаны различные юниты. Кроме того, некоторые из них могут казаться безразмерными, но полезно помнить, что они могут быть в любых подходящих единицах, если и сигнал, и шум выражены в одних и тех же единицах .
Расчет отношения сигнал/шум является важным понятием в науке и технике, и мы можем использовать его для измерения любого вида сигнала или передачи. Итак, узнав, что такое отношение сигнал/шум, давайте выясним, что такое хороший SNR.
Отношение сигнал/шум выражается как одно числовое значение в децибелах (дБ).
Отношение может быть нулевым, положительным или отрицательным. Отношение SNR больше нуля указывает на то, что мощность сигнала выше уровня шума. Когда значение из формулы SNR равно нулю, сигнал имеет ту же силу, что и шум. Наконец, отрицательное значение SNR означает, что сигнал слабее шума.
Итак, к какому соотношению сигнал/шум следует стремиться?
Высокое отношение сигнал/шум 👍
Высокое отношение сигнал/шум означает любое значение больше нуля. Но чем больше значение SNR, тем больше сигнал по сравнению с шумом . Это означает, что независимо от того, какой тип передачи должен иметь место, он будет эффективным и точным .Низкое отношение сигнал/шум 👎
Если значение SNR низкое, это означает, что шум превышает допустимое значение, нарушая любую форму передачи данных . Например, это может происходить при передаче текста, изображений, аудио- и видеопотоков и телеметрии.
Было бы разумно прочитать калькулятор передачи данных Omni и понять передачу данных на ваших телефонах.
Калькулятор отношения сигнал-шум имеет пять различных формул ОСШ внутри него. Это позволяет вам вычислять различные типы SNR на основе того, какой у вас входной сигнал или в каких единицах вы измеряете данные:
- Отношение сигналов;
- SNR в децибелах;
- Мощность SNR;
- Напряжение SNR; и
- ОСШ от коэффициента вариации.
Все пять типов SNR требуют ввода:
- Сила сигнала; и
- Уровень шума.
В результате вы получите соотношение сигнал/шум на основе выбранного вами типа.
Например, если ваш сигнал равен 6 вольтам , а шум равен 4 вольтам , вам нужно выбрать Voltage SNR . Тогда результат будет 3,522 дБ .
Изменение типа отношения сигнал/шум заключается в формуле. Как мы упоминали выше, существует пять способов расчета SNR:
SNR как отношение сигнала в абсолютных единицах:
SNR=сигнал/шумSNR = \text{сигнал} / \text{шум}SNR=сигнал/шум
SNR как разница сигналов в децибелах:
ОСШ (дБ) = сигнал (дБ) − шум (дБ) ОСШ \text{(дБ)} = \text{сигнал (дБ)} — \text{шум (дБ)} ОСШ (дБ) = сигнал (дБ) −шум (дБ)
Мощность SNR:
pSNR=10×log(сигнал/шум)pSNR = 10 \times \log{(\text{сигнал/шум})}pSNR=10×log(сигнал/шум)
Напряжение SNR:
vSNR=20×log(сигнал/шум)vSNR = 20 \times \log{(\text{сигнал/шум})}vSNR=20×log(сигнал/шум) 92 ОСШ=μ2/σ2
где:
SNR(дБ)SNR(дБ)SNR(дБ) — Отношение сигнал/шум в децибелах;
pSNRpSNRpSNR — отношение мощности сигнал/шум;
vSNRvSNRvSNR — Отношение сигнал/шум по напряжению;
мк\мкм — Среднее значение сигнала; и
σ\sigmaσ — стандартное отклонение шума.
💡 Помните, что в приведенных выше уравнениях основание логарифма всегда равно 10.
📶 Как правило, рекомендуемое отношение сигнал/шум для беспроводных сетей до использования Интернета составляет 20 дБ . The table below shows some SNR values and what their requirements for connectivity are:
SNR values | Requirements |
|---|---|
5 — 10 dB | Cannot establish a connection |
10–15 дБ | Может установить ненадежное соединение |
15 — 25 dB | Acceptable level to establish a poor connection |
25 — 40 dB | Considered a good connection |
41+ dB | Считается отличным соединением |
Эти статистические данные отношения сигнал-шум играют важную роль в области беспроводной связи. Еще одна хорошая вещь, о которой следует помнить, это то, что увеличение SNR может увеличить пропускную способность канала беспроводной сети. Воспользуйтесь нашим калькулятором скорости передачи данных и калькулятором модуляции, чтобы понять, как данные передаются с помощью сигналов.
Часто задаваемые вопросы
Как рассчитать отношение сигнал/шум?
Чтобы рассчитать отношение сигнал/шум, вам нужен уровень сигнала и шума. Тогда:
- Если у вас есть сигналы в децибелах (дБ), вычтите шум из сигнала .
- Если ваши расчеты сделаны в ваттах , используйте формулу отношения мощности сигнал/шум
SNR = 10 × log(сигнал/шум). - Если ваши расчеты в вольт , используйте формулу отношения сигнал/шум напряжения
SNR = 20 × log(сигнал/шум). -
logобозначает десятичный логарифм.
Что такое хорошее отношение сигнал/шум?
Например, с точки зрения сети передачи данных, хорошее SNR (отношение сигнал/шум) составляет 20 дБ или выше . И если сеть предназначена для использования голосовых приложений, то она должна быть 25 дБ или выше.
Хорошее отношение сигнал/шум имеет 9Уровень сигнала 0023 намного выше, чем уровень шума , поскольку чем больше уровень шума, тем больше помех. Низкое отношение сигнал/шум означает, что уровень фонового шума больше, чем должен быть по сравнению с требуемым сигналом.
Каково отношение сигнал/шум для сигнала 450 дБ и шума 350 дБ?
Отношение сигнал-шум (SNR) для сигнала 450 дБ и шума 350 дБ составляет 100 дБ .
Значения уровня сигнала и шума уже указаны в децибелах (дБ), поэтому формула отношения сигнал/шум:
ОСШ (дБ) = сигнал - шум
Какие шумы могут влиять на отношение сигнал/шум?
Шум, влияющий на отношение сигнал/шум, может быть электронным, тепловым, квантовым, биологическим или акустическим. Кроме того, мы можем рассматривать влажность как шум. Как правило, любые нежелательные помехи, влияющие на качество сигнала, можно рассматривать как шум .
Значительное количество шума может привести к нарушению передачи текста, графики, аудио и видео.
Komal Rafay
Тип отношения сигнал/шум
Сигнал
Отношение сигнал/шум
дБ(с)
Проверить 9 аналогичных значений энергии, работы и мощности ⚡
3Упругая потенциальная энергия 0…
Отношение сигнал-шум (SNR) и мощность беспроводного сигнала
- Последнее обновление
- Сохранить как PDF
Обзор
Для наилучшей работы в беспроводной среде важно, чтобы беспроводные устройства могли распознавать принимаемые сигналы как подлинную информацию, которую они должны прослушивать, и игнорировать любые фоновые сигналы в спектре. Существует концепция, известная как отношение сигнал-шум или SNR, которая обеспечивает наилучшие функциональные возможности беспроводной сети. SNR — это разница между принятым беспроводным сигналом и уровнем шума. Минимальный уровень шума — это просто ошибочные фоновые передачи, которые излучаются либо другими устройствами, расположенными слишком далеко, чтобы сигнал был разборчивым, либо устройствами, которые непреднамеренно создают помехи на той же частоте.
Например, если радиотерминал клиентского устройства принимает сигнал на уровне -75 дБм, а минимальный уровень шума составляет -90 дБм, то эффективное отношение сигнал-шум составляет 15 дБ. Тогда это будет отражаться как мощность сигнала 15 дБ для этого беспроводного соединения.
Чем дальше принимаемый сигнал от минимального уровня шума, тем лучше качество сигнала. Сигналы, близкие к минимальному уровню шума, могут быть подвержены повреждению данных, что приведет к повторной передаче между передатчиком и приемником. Это ухудшит пропускную способность беспроводной сети и задержку, поскольку повторно передаваемые сигналы будут занимать эфирное время в беспроводной среде.
Точки доступа Cisco Meraki используют соотношение сигнал-шум как показатель качества беспроводного соединения. Это дает более точное представление о состоянии беспроводных сигналов, поскольку учитывает радиочастотную среду и уровни окружающего шума. Например, принятый сигнал -65 дБм можно считать хорошим в месте с минимальным уровнем шума -90 дБм (SNR 25 дБ), но не так хорошо в месте с минимальным уровнем шума -80 дБм (SNR 15 дБ). ).
Как правило, сигнал со значением SNR 20 дБ или более рекомендуется для сетей передачи данных, тогда как значение SNR 25 дБ или более рекомендуется для сетей, использующих голосовые приложения. Узнайте больше о соотношении сигнал/шум.
Просмотр отношения сигнала клиента к шуму
Просмотр SNR на панели мониторинга Cisco Meraki
Все беспроводные клиенты, подключенные к точке доступа Meraki, будут иметь значения SNR, отображаемые на панели мониторинга. Эту информацию можно просмотреть, перейдя к Для всей сети > Клиенты. Затем выберите беспроводного клиента, чтобы просмотреть дополнительные сведения о подключении этого конкретного устройства. Здесь вы увидите дополнительную информацию о точке доступа, к которой подключен клиент, используемом беспроводном канале и уровне сигнала (SNR).
Просмотр SNR на подключенной точке доступа
Чтобы просмотреть SNR непосредственно на клиентском устройстве, просто откройте веб-браузер на этом устройстве и перейдите по адресу ap.meraki.com или 9.0023 my.meraki.com . Затем отобразится локальная страница состояния точки доступа, к которой в данный момент подключено клиентское устройство. Здесь вы увидите различные сведения о беспроводном соединении этого клиентского устройства, включая уровень сигнала между этим клиентом и точкой доступа.
Стандартная карта WLAN в ноутбуке не предназначена для измерения уровня шума окружающей среды, поэтому требуются специальные адаптеры, такие как Wi-Spy dBx.