
Фотоэлектрические датчики положения – ТА
Фотоэлектрические (оптические) датчики имеют собственный излучатель и приемник оптического излучения, обычно красного и инфракрасного диапазона.
Фотоэлектрические датчики классифицируются на три группы:
- тип T — с приемом прямого луча от излучателя;
- тип R — с приемом луча, возвращенного от отражателя;
- тип D — с приемом луча, рассеянно отраженного от объекта.
Срабатывание датчика происходит при перекрывании луча оптически непрозрачным объектом (для датчиков T и R), либо объектом, способным в достаточной степени отразить оптическое излучение (для датчиков D).
Для выбора датчиков по параметрам воспользуйтесь фильтрами слева.
Фотоэлектрические датчики типа Т (прямой луч)
Фотоэлектрические датчики типа Т характеризуются тем, что излучатель и приемник размещены в отдельных корпусах. Прямой оптический луч идет от излучателя к приемнику и может быть перекрыт объектом воздействия. Зона чувствительности датчиков типа T определяется как зона между излучателем и приемником.
Прямой оптический луч идет от излучателя к приемнику и может быть перекрыт объектом воздействия. Зона чувствительности датчиков типа T определяется как зона между излучателем и приемником.
Излучатель и приемник могут получать напряжение питания от различных источников питания. Индикатор излучателя сигнализирует о подаче напряжения питания. Индикатор приемника сигнализирует о срабатывании приемника. Элемент коммутации расположен в приемнике. Излучатель и приемник имеют разные обозначения и заказываются как отдельные изделия.
Фотоэлектрические датчики типа R (рефлекторные)
Фотоэлектрические датчики типа R (рефлекторные) имеют размещенный в одном корпусе излучатель и приемник. Приемник принимает луч излучателя, отраженный от специального отражателя. При этом возможны два варианта использования этих датчиков:
- объект воздействия прерывает луч при неподвижно закрепленном отражателе;
- отражатель закрепляется на подвижном объекте.

Для датчиков типа R зона чувствительности определяется как зона между датчиком и отражателем.
Фотоэлектрические датчики типа D (диффузного отражения)
Фотоэлектрические датчики типа D (диффузного отражения) имеют размещенный в одном корпусе излучатель и приемник. Приемник принимает луч, рассеянно отраженный от объекта воздействия. Объект может перемещаться как вдоль относительной оси, так и под углом к ней.
Объект воздействия для фотоэлектрических датчиков
За стандартный объект воздействия принимают:
- при max зоне чувствительности до 400 мм – белую бумагу с отражающей способностью 90%, размером 100×100 мм;
- при max зоне чувствительности более 400 мм – белую бумагу с отражающей способностью 90%, размером 200×200 мм.
При применении объекта воздействия, отличающегося от стандартного, реальные максимальные расстояния срабатывания могут не соответствовать нормированным, и необходимо применять поправочные коэффициенты.
Оптические датчики положения
Датчик положения AR-G18-3C5
Барьерный датчик положения
- Дальность срабатывания: 5 м
- Контакт: НО+НЗ
- Тип: NPN или PNP
- Резьба: М18×1
- Длина провода: 1,95 м
Датчик положения AR-G18-3A40
Диффузный датчик положения
- Дальность срабатывания: 0,4 м
- Контакт: НО+НЗ
- Тип: NPN или PNP
- Резьба: М18×1
- Длина провода: 1,95 м
Датчик положения AR-G30-3A70
Диффузный датчик положения
- Дальность срабатывания: 0,2…1 м
- Контакт: НО+НЗ
- Тип: NPN или PNP
- Резьба: М30×1,5
- Длина провода: 1,95 м
Датчик положения AR-BX15M-TFR
Барьерный датчик положения
- Дальность срабатывания: 15 м
- Контакт: НО+НЗ
- Реле: ~3 А, 250 В
- Длина провода: 1,95 м
Датчик положения AR-G18-3A10
Диффузный датчик положения
- Дальность срабатывания: 0,1 мм
- Контакт: НО+НЗ
- Тип: NPN или PNP
- Резьба: М18×1
Пассивный инфракрасный детектор движения Finder 18. 21
21
Пассивный инфракрасный детектор движения для установки в помещении
- Порог воздействия внешнего освещения: 5…350 лк
- Задержка перед угасанием: 10 с…12 мин
- Угол обзора: 110°
- Глубина поля: 8 м
- Выходной контакт: 1НО
- Реле: ~10 А, 230 В или ~10 А, 250 В
- Питание: ~120…230 В или ≅24 В
- Защита: IP40
- Монтаж: открытая установка на потолок
Пассивный инфракрасный детектор движения Finder 18.31
Пассивный инфракрасный детектор движения для установки в помещении
- Порог воздействия внешнего освещения: 5…350 лк
- Задержка перед угасанием: 10 с. ..12 мин
- Угол обзора: 110°
- Глубина поля: 8 м
- Выходной контакт: 1НО
- Реле: ~10 А, 230 В или ~10 А, 250 В
- Питание: ~120…230 В или ≅24 В
- Защита: IP40
- Монтаж: закрытая установка на потолок
 ..12 мин
..12 минПассивный инфракрасный детектор движения Finder 18.01
Пассивный инфракрасный детектор движения для установки в помещении
- Порог воздействия внешнего освещения: 5…350 лк
- Задержка перед угасанием: 10 с…12 мин
- Угол обзора: 110°
- Глубина поля: 10 м
- Выходной контакт: 1НО
- Реле: ~10 А, 230 В
- Питание: ~120…230 В
- Защита: IP40
- Монтаж: настенный
Пассивный инфракрасный детектор движения Finder 18. 11
11
Пассивный инфракрасный детектор движения для установки снаружи
- Порог воздействия внешнего освещения: 5…350 лк
- Задержка перед угасанием: 10 с…12 мин
- Угол обзора: 110°
- Глубина поля: 10 м
- Выходной контакт: 1НО
- Реле: ~10 А, 230 В
- Питание: ~120…230 В
- Защита: IP54
- Монтаж: настенный
Датчик положения: Типы датчиков положения
Датчики являются очень важными органами любой измерительной системы. Они собирают данные об окружающей среде/физических параметрах и подают электрический сигнал в качестве входных данных для систем. Среди большого разнообразия датчиков, работающих на разных принципах и используемых в различных приложениях, датчики положения играют важную роль в различных системах. Будь то авиационные системы с дистанционным управлением, автомобили с электроприводом, сверхскоростные поезда, совершающие круговые повороты, машины для литья под давлением, упаковочные машины, медицинское оборудование и т. д., датчики положения находят свое применение, конечно, по-разному.
Будь то авиационные системы с дистанционным управлением, автомобили с электроприводом, сверхскоростные поезда, совершающие круговые повороты, машины для литья под давлением, упаковочные машины, медицинское оборудование и т. д., датчики положения находят свое применение, конечно, по-разному.
Что такое датчики положения?
Наиболее распространенный способ классификации широкого спектра датчиков основан на конкретном применении датчика. Датчик, используемый для измерения влажности, называется датчиком влажности, датчик, используемый для измерения давления, называется датчиком давления, датчик, используемый для измерения уровня жидкости, называется датчиком уровня и т. д., хотя все они могут использовать один и тот же принцип измерения. Аналогичным образом датчик, используемый для измерения положения, называется датчиком положения.
Датчики положения — это в основном датчики для измерения расстояния, пройденного телом, начиная с исходного положения. Датчики положения определяют, насколько тело сместилось от исходного или исходного положения, и часто выходные данные возвращаются в систему управления, которая предпринимает соответствующие действия. Движение тела может быть прямолинейным или криволинейным; соответственно, датчики положения называются датчиками линейного положения или датчиками углового положения.
Датчики положения определяют, насколько тело сместилось от исходного или исходного положения, и часто выходные данные возвращаются в систему управления, которая предпринимает соответствующие действия. Движение тела может быть прямолинейным или криволинейным; соответственно, датчики положения называются датчиками линейного положения или датчиками углового положения.
Типы датчиков положения
Датчики положения используют различные принципы восприятия для определения смещения тела. В зависимости от различных принципов восприятия, используемых для датчиков положения, их можно классифицировать следующим образом:
1. Датчики положения на основе сопротивления или потенциометрические
2. Емкостные датчики положения
3. Линейные дифференциальные трансформаторы напряжения
4. Линейные Магнитострикционные Датчик положения
5. Датчик положения на основе вихревого тока
6. Датчики на основе эффекта на основе эффекта. резистивный эффект как принцип восприятия. Чувствительный элемент представляет собой просто резистивную (или проводящую) дорожку. К корпусу или части корпуса прикрепляют стеклоочиститель, смещение которого необходимо измерить. Дворник соприкасается с гусеницей. При движении дворника (вместе с корпусом или его частью) изменяется сопротивление между одним концом гусеницы и дворником. Таким образом, сопротивление становится функцией положения стеклоочистителя. Изменение сопротивления на единицу изменения положения стеклоочистителя является линейным.
резистивный эффект как принцип восприятия. Чувствительный элемент представляет собой просто резистивную (или проводящую) дорожку. К корпусу или части корпуса прикрепляют стеклоочиститель, смещение которого необходимо измерить. Дворник соприкасается с гусеницей. При движении дворника (вместе с корпусом или его частью) изменяется сопротивление между одним концом гусеницы и дворником. Таким образом, сопротивление становится функцией положения стеклоочистителя. Изменение сопротивления на единицу изменения положения стеклоочистителя является линейным.
Сопротивление, пропорциональное положению стеклоочистителя, измеряется с помощью делителя напряжения. К концам дорожки прикладывают постоянное напряжение и измеряют напряжение на сопротивлении между щеткой и одним концом дорожки. Таким образом, выходное напряжение на скользящем элементе и одном конце дорожки пропорционально положению скользящего элемента.
Токопроводящая дорожка может быть выполнена линейной или угловой в зависимости от требований.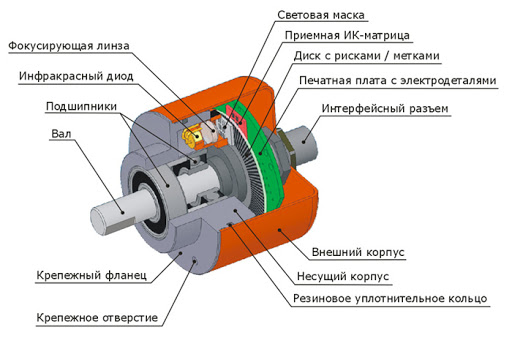 Дорожки изготовлены из углерода, резистивной проволоки или пьезорезистивного материала.
Дорожки изготовлены из углерода, резистивной проволоки или пьезорезистивного материала.
Рис. 1. Различные типы токопроводящих дорожек в потенциометрическом датчике положения
Используются три типа потенциометров.
а) проволочная валика
Сестранок стеклоочистителей вдоль катушки Ni-Chrome Wire
Провод склоняется к Tofail, вариации температуры
B) Cermet
Slides Wiper Slides на проводящую керамическую дорожку
лучше, чем проволочные,
C) ПЛАСТИЯ ПЛАЗНАЯ ПЛАЗНАЯ ПЛАСТИЯ ПЛАЗАЯ ПЛАСТИЯ ПЛАСТИКА.
Высокое разрешение.
Преимуществом этих датчиков является простота использования.
Емкостные датчики положения
Емкость между любыми двумя пластинами зависит от диэлектрической проницаемости диэлектрика между пластинами, площади перекрытия между пластинами и расстояния между двумя пластинами. Любой из этих трех параметров может быть изменен для разработки емкостного датчика.
Емкостные датчики положения могут использовать следующие две конфигурации:
1. Путем изменения диэлектрической проницаемости
В этой конфигурации тело или его часть, перемещение которой необходимо измерить, соединяется с диэлектрическим материалом между пластинами. При движении тела эффективная диэлектрическая проницаемость между пластинами является результатом диэлектрической проницаемости воздуха и диэлектрической проницаемости диэлектрического материала. Изменение диэлектрической проницаемости приводит к изменению емкости между пластинами. Таким образом, емкость становится функцией положения тела.
Рис. 2. Настройка емкостного датчика положения путем изменения диэлектрической проницаемости
Этот принцип обычно используется в датчиках уровня, в которых используются две концентрические трубки, а жидкость действует как диэлектрик. Изменение емкости в зависимости от уровня жидкости является линейным.
2. Путем изменения площади перекрытия
В этой конфигурации тело или его часть, перемещение которой необходимо измерить, соединяется с одной из пластин, другая пластина остается неподвижной. При движении тела площадь перекрытия пластин меняется. Изменение площади перекрытия между пластинами приводит к изменению емкости между пластинами. Таким образом, емкость становится функцией положения тела.
Этот принцип можно использовать как для линейных, так и для угловых движений.
Рис. 3: Настройка датчика емкостного положения путем изменения области перекрытия
Линейный трансформатор дифференциального напряжения
Линейный вариабельный трансформатор, обычно известный по его акрониме, который является Electromecneremer. движение объекта в соответствующий электрический сигнал. Он используется для измерения перемещений в диапазоне от микрон до нескольких дюймов.
LVDT состоит из первичной обмотки и пары вторичных обмоток. Первичная обмотка зажата между вторичными обмотками. Вторичные обмотки расположены симметрично относительно первичной и намотаны одинаково. Катушки намотаны на полую форму из армированного стекловолокном полимера, а затем закреплены в цилиндрическом корпусе из нержавеющей стали. Обмотки образуют неподвижную часть датчика.
Первичная обмотка зажата между вторичными обмотками. Вторичные обмотки расположены симметрично относительно первичной и намотаны одинаково. Катушки намотаны на полую форму из армированного стекловолокном полимера, а затем закреплены в цилиндрическом корпусе из нержавеющей стали. Обмотки образуют неподвижную часть датчика.
Подвижным элементом LVDT называется сердечник, изготовленный из высокопроницаемого магнитного материала; сердечник свободно перемещается в осевом направлении в полом канале катушки. Сердечник механически соединен с объектом, перемещение которого необходимо измерить.
Рис. 4: Графическое изображение, показывающее внутренности типичного линейного дифференциального трансформатора напряжения
Когда первичная обмотка LVDT питается переменным током подходящей амплитуды и частоты, переменное напряжение индуцируется во вторичной обмотке. Выход LVDT представляет собой дифференциальное напряжение между двумя вторичными обмотками; дифференциальное напряжение зависит от положения сердечника. Часто дифференциальное выходное напряжение переменного тока преобразуется в постоянное напряжение для использования в измерительных системах.
Часто дифференциальное выходное напряжение переменного тока преобразуется в постоянное напряжение для использования в измерительных системах.
Когда первичная обмотка возбуждается, напряжение, индуцируемое во вторичной обмотке, зависит от связи магнитного потока сердечника со вторичными обмотками. Когда сердечник находится в центре, на две вторичные обмотки поступает одинаковый поток, и, следовательно, выходное дифференциальное напряжение равно нулю. Однако, когда сердечник смещен от центра, во вторичных обмотках индуцируется неравный поток, и величина потока в двух обмотках и, следовательно, дифференциальное напряжение между двумя крыльями зависит от положения сердечника.
Рис. 5. Изображение, показывающее МАГНИТОСТРИКТИВНЫЙ эффект
LVDT предлагают различные преимущества, такие как работа без трения, очень высокое разрешение, неограниченный механический срок службы, высокая надежность, отсутствие перекрестной чувствительности, защита от воздействия окружающей среды и так далее.
Для измерения угловых перемещений используется вариант LVDT, т. е. вращающийся дифференциальный трансформатор напряжения. RVDT точно аналогичен LVDT с точки зрения работы; разница в их конструкции.
Магнитострикционные линейные датчики положения
МАГНИТОСТРИКЦИОННЫЕ ЛИНЕЙНЫЕ ДАТЧИКИ ПОЛОЖЕНИЯ
Магнитострикция относится к эффекту, при котором материал изменяет свой размер или форму в соответствии с магнитным полем. , внутри материала, с приложенным магнитным полем. Материалы, обладающие такими свойствами, представляют собой ферромагнитные материалы, такие как железо, никель и кобальт. Обратный эффект, то есть свойство изменять магнитные свойства из-за приложенного напряжения, называется эффектом Виллари.
Рис. 6. Изображение, показывающее конструкцию магнитострикционного датчика положения
Магнитострикционный датчик положения, в основном состоящий из пяти компонентов, т. между позиционным магнитом и головным концом чувствительного стержня. Чувствительный стержень устанавливается вдоль измеряемой оси движения. Позиционный магнит представляет собой постоянный магнит в форме кольца, прикрепленный к элементу, который будет двигаться и перемещается вдоль чувствительного стержня.
между позиционным магнитом и головным концом чувствительного стержня. Чувствительный стержень устанавливается вдоль измеряемой оси движения. Позиционный магнит представляет собой постоянный магнит в форме кольца, прикрепленный к элементу, который будет двигаться и перемещается вдоль чувствительного стержня.
Рис. 7: Графическое изображение, показывающее внутреннюю часть магнитострикционного датчика положения
Импульс опроса (или ток) посылается по волноводу от электронного модуля. В месте расположения позиционного магнита магнитное поле, создаваемое импульсом тока, взаимодействует с магнитным полем позиционного магнита. Результатом является генерация звуковой волны или волны деформации кручения в волноводе. Волна деформации распространяется к головному концу, где датчик регистрирует ее приход. Волна деформации, распространяющаяся от головной части, устраняется демпфирующим модулем.
Рис. 8: Изображение вихретокового датчика положения
Разница во времени между генерацией импульса опроса и приходом обратного импульса (волны деформации) указывает местоположение позиционного магнита( или тело, соединенное с ним)
Датчик положения на основе вихревых токов
Датчик положения на основе вихревых токов
Вихревые токи представляют собой замкнутые контуры индуцированного тока, циркулирующего в плоскостях, перпендикулярных магнитному потоку.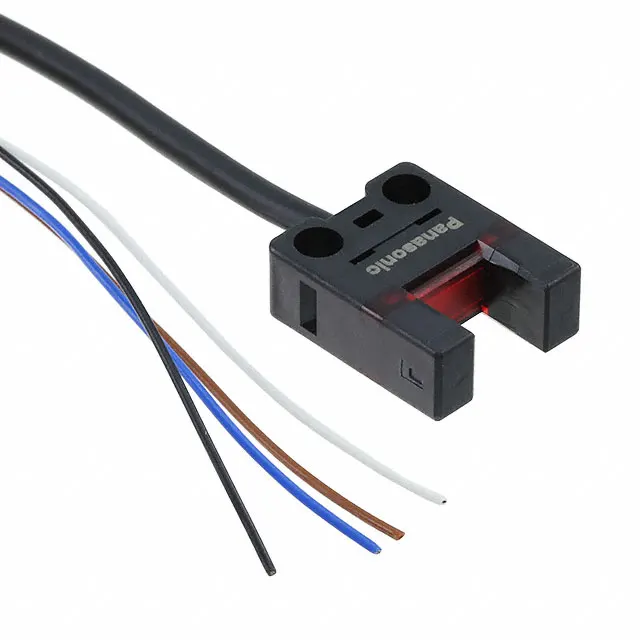 Обычно они движутся параллельно обмотке катушки, и поток ограничивается областью индуцирующего магнитного поля.
Обычно они движутся параллельно обмотке катушки, и поток ограничивается областью индуцирующего магнитного поля.
Рис. 9: Схематическое изображение, поясняющее принцип работы вихретоковых датчиков
Принцип работы вихретоковых датчиков следующий: Вихретоковых датчиков положения
Переменный ток, подаваемый на катушку, индуцирует первичное магнитное поле. Первичное магнитное поле индуцирует вихревые токи в электропроводящем материале (вблизи катушки). Вихревые токи, в свою очередь, индуцируют вторичное поле. Это вторичное магнитное поле влияет на импеданс катушки. Наличие или отсутствие проводящего материала изменяет вторичное поле и, в свою очередь, импеданс катушки. Изменение импеданса катушки можно использовать для измерения расстояния до электропроводящего тела.
Рис. 11: Диаграмма, показывающая изменение импеданса катушки в зависимости от расстояния в вихревых токах
Для определенного объекта измерения изменение импеданса катушки является функцией расстояния. Следовательно, расстояние можно определить путем измерения изменения импеданса.
Следовательно, расстояние можно определить путем измерения изменения импеданса.
HEBM и оптоволоконный датчик положения
Магнитные датчики положения на основе эффекта Холла
Рис. 12. Репрезентативное изображение, поясняющее работу магнитных датчиков положения на основе эффекта Холла
Принцип эффекта Холла гласит, что когда проводник с током помещается в магнитное поле, возникает напряжение, перпендикулярное направлению поля и протеканию тока.
При пропускании постоянного тока через тонкий лист полупроводникового материала разность потенциалов на выходных контактах отсутствует, если магнитное поле равно нулю. Однако при наличии перпендикулярного магнитного поля ток искажается. Неравномерное распределение электронной плотности создает разность потенциалов на выходных клеммах. Это напряжение называется напряжением Холла. Если входной ток поддерживается постоянным, напряжение Холла будет прямо пропорционально силе магнитного поля.
Рис. 13: Изображение, показывающее магнитный датчик на основе эффекта Холла
В датчиках положения, использующих эффект Холла, подвижная часть соединена с магнитом. Таким образом, датчик состоит из элемента Холла и магнита. находится в валу датчика. При движении тела или его части перемещается и магнит, а значит, и магнитное поле на элементе Холла, а значит и напряжение Холла. Таким образом, напряжение Холла становится функцией положения движущейся части.
Имеющиеся в продаже элементы Холла изготовлены из объемного арсенида индия (InAs), тонкопленочного InAs, арсенида галлия (GaAs), антимонида индия (InSb).
Волоконно-оптический датчик положения
Оптические волокна обладают явными преимуществами своей невосприимчивости к электромагнитным помехам, неспособности генерировать искры в потенциально взрывоопасной среде. Датчики положения на основе оптоволокна могут использоваться для измерений в диапазоне от нескольких сантиметров до нескольких метров, где очень высокое разрешение не имеет первостепенного значения.
В основе этого сенсора лежит флуоресценция с последующим поглощением. Источник накачки подключается к телу или его части, движение которой необходимо уловить. Волокно флуоресцентное, на концах волокна размещены два фотодетектора.
Рис. 14. Диаграмма, показывающая работу оптоволоконного датчика положения
Логарифм отношения двух сигналов S1 и S2 является линейным по x и не зависит от мощности источника накачки.
Оптический датчик положения
Оптический датчик положения
Оптические датчики основаны на одном из двух механизмов. В первом типе свет передается с одного конца и принимается с другого. Отслеживается изменение одной из характеристик — интенсивности, длины волны, поляризации или фазы — по физическому параметру. Во втором типе проходящий свет отражается от объекта, а свет, возвращающийся к источнику, отслеживается.
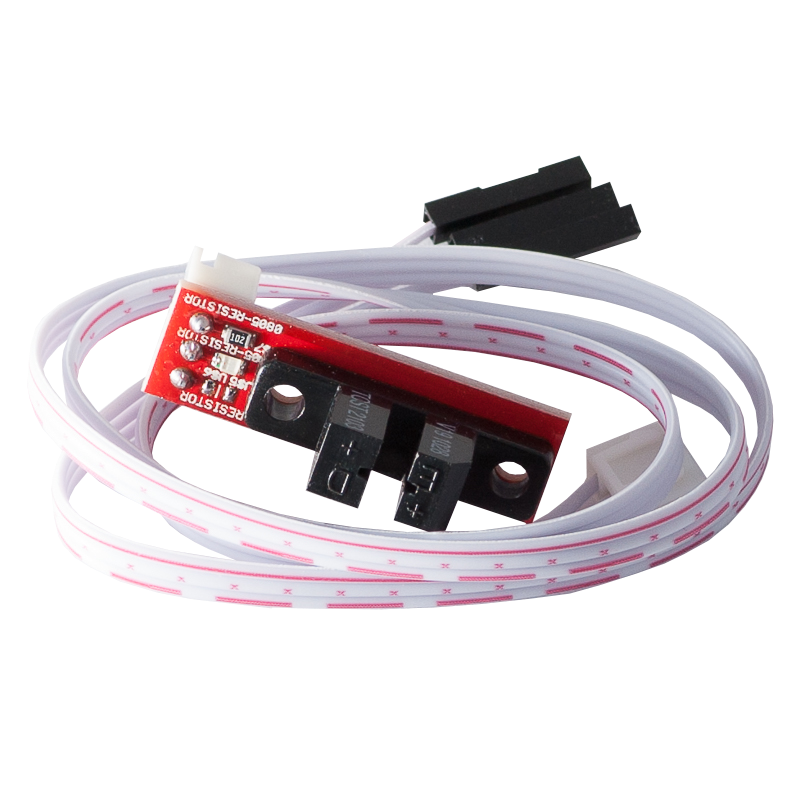
Оптические датчики первого типа используются в оптических энкодерах, обычно используемых для обеспечения обратной связи по положению исполнительных механизмов. Оптические энкодеры состоят из стеклянного или пластикового диска, который вращается между источником света (светодиодом) и приемником света (фотодетектором). Диск кодируется чередующимися светлыми и темными секторами, так что при вращении диска генерируются импульсы. На основе подсчета импульсов вычисляется скорость диска и, следовательно, угловое положение. Для определения направления движения используются два фотодетектора. Абсолютные оптические энкодеры имеют уникальный код, который можно определить для каждого углового положения.
Оптические энкодеры состоят из стеклянного или пластикового диска, который вращается между источником света (светодиодом) и приемником света (фотодетектором). Диск кодируется чередующимися светлыми и темными секторами, так что при вращении диска генерируются импульсы. На основе подсчета импульсов вычисляется скорость диска и, следовательно, угловое положение. Для определения направления движения используются два фотодетектора. Абсолютные оптические энкодеры имеют уникальный код, который можно определить для каждого углового положения.
Пример датчиков второго типа можно найти на станках, измеряя и отображая положение рабочего стола.
Рис. 15: Изображение, показывающее применение датчика положения в станках
На полосе или диске выгравированы очень тонкие линии, которые прерывают луч. Количество прерываний подсчитывается электронным способом и представляет положение или угол.
Выбор датчика
ВЫБОР ДАТЧИКА
Когда вариантов много, выбор одного часто становится сложной задачей. Как и в случае с другими типами датчиков, датчики положения в первую очередь выбираются в соответствии с требованиями приложения. Параметры, которые необходимо учитывать при выборе датчика положения:
Как и в случае с другими типами датчиков, датчики положения в первую очередь выбираются в соответствии с требованиями приложения. Параметры, которые необходимо учитывать при выборе датчика положения:
· Контактный/Бесконтактный тип
· Движение – Линейное/Вращательное
· Диапазон измерения
· Ограничения – Размеры/Вес
· Среда
· Точность
· Разрешение
· Время отклика
· Стоимость
· Выход
Потенциометры часто являются самым дешевым вариантом для определения позиции, но нуждаются в физическом контакте с движущейся целью. Датчики Холла также дешевы, но используются в приложениях типа ВКЛ/ВЫКЛ. Это эффективно только для приложений, где не требуется подробная информация о местоположении. Оптические датчики имеют очень быстрый отклик, поскольку они бесконтактного типа, легкие по весу и не должны противодействовать трению. Точность определяется количеством отсчетов. Чем больше счетчиков, тем выше точность. Тем не менее, необходимо правильное выравнивание и защита от суровых условий или пыли. Они относительно дорогостоящие. Датчики положения на основе вихревых токов имеют умеренную цену, но не являются предпочтительными в приложениях, требующих очень подробной информации о местоположении, или когда между датчиком и целью существуют большие промежутки. Они могут работать в грязной среде и хороши при установке на стационарной механической конструкции. LVDT или RVDT имеют высокую цену, но могут работать в грязных или суровых условиях. Они предлагают высокую точность, высокую точность, а также высокую чувствительность. Они находят применение в промышленности и аэрокосмической отрасли.
Чем больше счетчиков, тем выше точность. Тем не менее, необходимо правильное выравнивание и защита от суровых условий или пыли. Они относительно дорогостоящие. Датчики положения на основе вихревых токов имеют умеренную цену, но не являются предпочтительными в приложениях, требующих очень подробной информации о местоположении, или когда между датчиком и целью существуют большие промежутки. Они могут работать в грязной среде и хороши при установке на стационарной механической конструкции. LVDT или RVDT имеют высокую цену, но могут работать в грязных или суровых условиях. Они предлагают высокую точность, высокую точность, а также высокую чувствительность. Они находят применение в промышленности и аэрокосмической отрасли.
Рубрики: Статьи
С тегами: емкостный датчик положения, магнитострикционный линейный датчик положения, оптический датчик положения, датчик положения, датчик
Каковы типы и области применения датчиков положения?
Определение положения является критически важной функцией в широком спектре приложений, от приводных цепей роботов до конвейерных лент в операциях цепочки поставок и раскачивания башен ветряных турбин.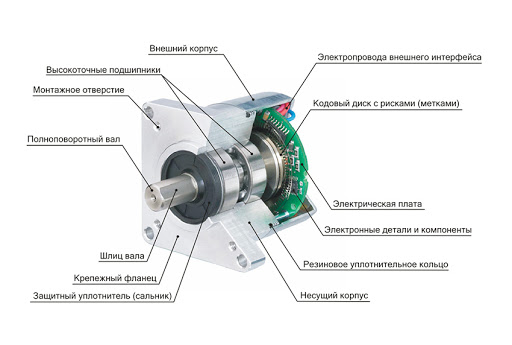
В этом FAQ кратко представлены различные формы определения положения, а затем рассмотрен ряд технологий, которые разработчики могут выбрать при реализации решения для определения положения.
- Измерение положения может быть линейным, вращательным или угловым, а также статическим или динамическим (измерение скорости и/или ускорения).
- Линейные датчики обычно ограничены определенным диапазоном измерения, в то время как датчики вращения обычно обеспечивают измерения с точки зрения оборотов или градусов.
- Эти датчики могут быть основаны на контактных или бесконтактных технологиях. Контактные датчики часто дешевле, а бесконтактные датчики более надежны.
- Некоторые датчики обеспечивают только инкрементальные измерения от одной точки к другой, в то время как другие предоставляют информацию об абсолютном положении относительно определенной опорной точки.

Потенциометрические датчики положения
Потенциометрические датчики положения представляют собой устройства, основанные на сопротивлении, которые сочетают в себе стационарную резистивную дорожку с очистителем, прикрепленным к объекту, положение которого необходимо определить. Движение объекта перемещает дворник по дорожке. Положение объекта измеряется при фиксированном постоянном напряжении с использованием дорожки и ползунка для формирования сети делителя напряжения для измерения либо линейного, либо вращательного движения  1) . Потенциометрические датчики недороги, но обычно имеют низкую точность и воспроизводимость.
1) . Потенциометрические датчики недороги, но обычно имеют низкую точность и воспроизводимость.
Индуктивные датчики положения
Индуктивные датчики положения используют изменения характеристик магнитного поля, которое индуцируется в катушках датчика. В зависимости от своей архитектуры они могут измерять линейные или вращательные положения. В датчике положения линейного регулируемого дифференциального трансформатора (LVDT) используются три катушки, намотанные на полую трубку; первичная обмотка и две вторичные обмотки. Катушки соединены последовательно с соотношением фаз вторичных катушек на 180° в противофазе по отношению к первичной катушке. Ферромагнитный сердечник, называемый якорем, помещается внутрь трубки и соединяется с объектом, положение которого измеряется.
Вихретоковые датчики положения
Вихретоковые датчики положения работают с электропроводящими объектами. Вихревые токи — это наведенные токи, возникающие в проводящем материале в присутствии изменяющегося магнитного поля. Эти токи текут по замкнутым петлям и генерируют вторичное магнитное поле. Вихретоковый датчик состоит из катушки и схемы линеаризации. Переменный ток возбуждает катушку для создания основного магнитного поля. Когда объект приближается или удаляется от катушки, его положение можно определить с помощью взаимодействия вторичного поля, создаваемого вихревыми токами, которое влияет на импеданс катушки. По мере приближения объекта к катушке потери на вихревые токи увеличиваются, а колебательное напряжение уменьшается (Рисунок 2) . Напряжение колебаний выпрямляется и обрабатывается схемой линеаризации для получения линейного выходного постоянного тока, пропорционального расстоянию до объекта.
Когда объект приближается или удаляется от катушки, его положение можно определить с помощью взаимодействия вторичного поля, создаваемого вихревыми токами, которое влияет на импеданс катушки. По мере приближения объекта к катушке потери на вихревые токи увеличиваются, а колебательное напряжение уменьшается (Рисунок 2) . Напряжение колебаний выпрямляется и обрабатывается схемой линеаризации для получения линейного выходного постоянного тока, пропорционального расстоянию до объекта.
Вихретоковые устройства являются надежными бесконтактными и часто используются в качестве датчиков приближения. Они всенаправленны и могут определять относительное расстояние до объекта, но не направление или абсолютное расстояние до объекта.
Емкостные датчики положения
Как следует из названия, емкостные датчики положения измеряют изменения емкости для определения положения измеряемого объекта.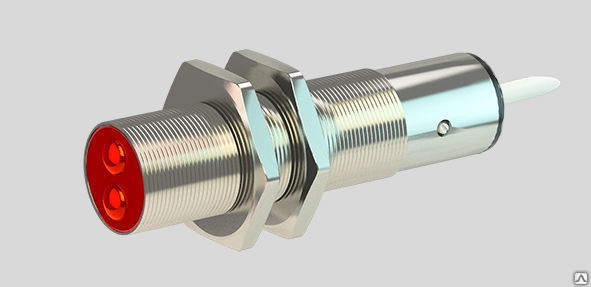 Эти бесконтактные датчики могут быть сконструированы для измерения линейных или угловых положений. Они состоят из двух пластин, разделенных диэлектрическим материалом, и используют один из двух методов определения положения объекта:
Эти бесконтактные датчики могут быть сконструированы для измерения линейных или угловых положений. Они состоят из двух пластин, разделенных диэлектрическим материалом, и используют один из двух методов определения положения объекта:
- Изменение диэлектрической проницаемости конденсатора
- Изменение площади перекрытия пластин конденсатора
Чтобы вызвать изменение диэлектрической проницаемости, объект, положение которого необходимо определить, прикрепляют к диэлектрическому материалу. По мере движения диэлектрического материала эффективная диэлектрическая проницаемость конденсатора изменяется из-за изменения комбинации площади диэлектрического материала и диэлектрической проницаемости воздуха. В качестве альтернативы объект можно прикрепить к одной из пластин конденсатора. По мере движения объекта пластины сближаются или отдаляются друг от друга, и изменение емкости используется для определения относительного положения.
Емкостные датчики могут измерять смещение объекта, расстояние, положение и толщину.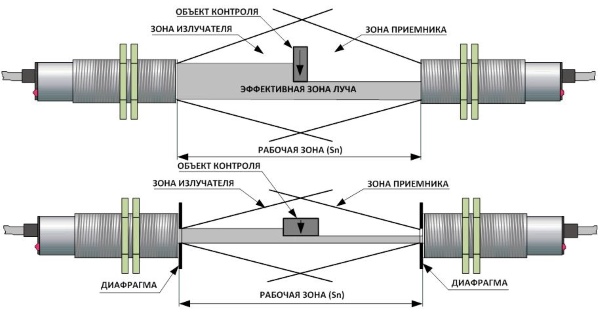 Благодаря высокой стабильности сигнала и разрешению емкостные датчики перемещения используются как в лабораториях, так и в промышленных условиях. Например, емкостные датчики используются для измерения толщины пленки и нанесения клея в автоматизированных процессах. В промышленных станках они используются для контроля смещения и положения инструмента.
Благодаря высокой стабильности сигнала и разрешению емкостные датчики перемещения используются как в лабораториях, так и в промышленных условиях. Например, емкостные датчики используются для измерения толщины пленки и нанесения клея в автоматизированных процессах. В промышленных станках они используются для контроля смещения и положения инструмента.
Магнитострикционные Датчики положения
Магнитострикция — это свойство ферромагнитных материалов, которое заставляет материал изменять свой размер или форму в присутствии приложенного магнитного поля. В магнитострикционном датчике положения подвижный позиционный магнит прикреплен к измеряемому объекту. Он включает в себя волновод, который состоит из провода, по которому передается импульс тока, соединенного с датчиком, расположенным на конце волновода (рисунок 3) . При пропускании импульса тока по волноводу в проводе создается магнитное поле, взаимодействующее с аксиальным магнитным полем постоянного магнита (магнит в поршне цилиндра, в Рисунок 3a ). Взаимодействие поля возникает в результате скручивания (эффект Видемана), которое вызывает натяжение провода, генерируя звуковой импульс, который распространяется по волноводу и регистрируется датчиком на конце волновода (рис. 3b) . Путем измерения времени, прошедшего между началом импульса тока и обнаружением звукового импульса, можно измерить относительное расположение позиционного магнита и, следовательно, объекта (рис. 3c) .
Взаимодействие поля возникает в результате скручивания (эффект Видемана), которое вызывает натяжение провода, генерируя звуковой импульс, который распространяется по волноводу и регистрируется датчиком на конце волновода (рис. 3b) . Путем измерения времени, прошедшего между началом импульса тока и обнаружением звукового импульса, можно измерить относительное расположение позиционного магнита и, следовательно, объекта (рис. 3c) .
Магнитострикционные датчики положения являются бесконтактными датчиками и используются для определения линейного положения. Волновод обычно размещается в трубке из нержавеющей стали или алюминия, что позволяет использовать эти датчики в грязных или влажных средах.
Датчики положения на эффекте Холла
Когда тонкий плоский проводник помещается в магнитное поле, любой протекающий ток имеет тенденцию накапливаться на одной стороне проводника, что приводит к возникновению разности потенциалов, называемой напряжением Холла. Если ток в проводнике постоянный, величина напряжения Холла будет отражать силу магнитного поля. В датчике положения на эффекте Холла объект соединяется с магнитом, размещенным в валу датчика. По мере движения объекта положение магнита меняется относительно элемента Холла, создавая переменное напряжение Холла. Измеряя напряжение Холла, можно определить положение объекта. Доступны специальные датчики положения на эффекте Холла, которые могут определять положение в трех измерениях (рис. 4). Датчики положения на эффекте Холла представляют собой бесконтактные устройства, которые обеспечивают высокую надежность и быстроту срабатывания и могут работать в широком диапазоне температур. Они используются в различных потребительских, промышленных, автомобильных и медицинских приложениях.
Если ток в проводнике постоянный, величина напряжения Холла будет отражать силу магнитного поля. В датчике положения на эффекте Холла объект соединяется с магнитом, размещенным в валу датчика. По мере движения объекта положение магнита меняется относительно элемента Холла, создавая переменное напряжение Холла. Измеряя напряжение Холла, можно определить положение объекта. Доступны специальные датчики положения на эффекте Холла, которые могут определять положение в трех измерениях (рис. 4). Датчики положения на эффекте Холла представляют собой бесконтактные устройства, которые обеспечивают высокую надежность и быстроту срабатывания и могут работать в широком диапазоне температур. Они используются в различных потребительских, промышленных, автомобильных и медицинских приложениях.
Оптоволоконные датчики положения
Существует два основных типа оптоволоконных датчиков. Во встроенных волоконно-оптических датчиках оптическое волокно используется в качестве чувствительного элемента. Во внешних волоконно-оптических датчиках оптическое волокно сочетается с другой сенсорной технологией для передачи сигналов на удаленную электронику для обработки. В случае собственных измерений положения оптоволокна временная задержка может быть определена с помощью такого устройства, как оптический рефлектометр во временной области. Сдвиг длины волны можно рассчитать с помощью прибора, реализующего оптическую рефлектометрию в частотной области. Волоконно-оптические датчики невосприимчивы к электромагнитным помехам, могут быть рассчитаны на работу при высоких температурах и не проводят электричество, поэтому их можно использовать вблизи источников высокого напряжения или легковоспламеняющихся материалов.
Во встроенных волоконно-оптических датчиках оптическое волокно используется в качестве чувствительного элемента. Во внешних волоконно-оптических датчиках оптическое волокно сочетается с другой сенсорной технологией для передачи сигналов на удаленную электронику для обработки. В случае собственных измерений положения оптоволокна временная задержка может быть определена с помощью такого устройства, как оптический рефлектометр во временной области. Сдвиг длины волны можно рассчитать с помощью прибора, реализующего оптическую рефлектометрию в частотной области. Волоконно-оптические датчики невосприимчивы к электромагнитным помехам, могут быть рассчитаны на работу при высоких температурах и не проводят электричество, поэтому их можно использовать вблизи источников высокого напряжения или легковоспламеняющихся материалов.
Другой тип оптоволоконного датчика, основанный на технологии волоконной брэгговской решетки (ВБР), также может использоваться для измерения положения. ВБР действует как режекторный фильтр, который отражает узкую часть света с центром вокруг длины волны Брэгга (λ B ) при освещении широким спектром света. Он представляет собой микроструктуру, вписанную в сердцевину оптического волокна. ВБР могут быть изготовлены для измерения различных параметров, таких как температура, деформация, давление, наклон, смещение, ускорение и нагрузка.
Он представляет собой микроструктуру, вписанную в сердцевину оптического волокна. ВБР могут быть изготовлены для измерения различных параметров, таких как температура, деформация, давление, наклон, смещение, ускорение и нагрузка.
Оптические датчики положения
Существует два типа оптических датчиков положения, также называемых оптическими энкодерами. В одном случае свет направляется на приемник на другом конце датчика. Во втором типе излучаемый световой сигнал отражается от контролируемого объекта и возвращается к источнику света. В зависимости от конструкции датчика для определения положения объекта используется изменение световых характеристик, таких как длина волны, интенсивность, фаза или поляризация. Оптические датчики положения на основе энкодера доступны как для линейного, так и для вращательного движения. Эти датчики делятся на три основные категории; пропускающие оптические энкодеры, отражательные оптические энкодеры и интерференционные оптические энкодеры.
Ультразвуковые датчики положения
Ультразвуковые датчики положения используют пьезоэлектрический кристаллический преобразователь для излучения высокочастотной ультразвуковой звуковой волны. Датчик измеряет отраженный звук. Ультразвуковые датчики можно использовать как простые датчики приближения, а более сложные конструкции могут предоставлять информацию о расстоянии. Ультразвуковые датчики положения работают с целевыми объектами из различных материалов и характеристик поверхности и могут обнаруживать мелкие объекты на большем расстоянии, чем многие другие типы датчиков положения. Они устойчивы к вибрации, окружающему шуму, инфракрасному излучению и электромагнитным помехам. Примеры приложений, использующих ультразвуковые датчики положения, включают определение уровня жидкости, высокоскоростной подсчет объектов, роботизированные навигационные системы и автомобильные датчики. Типичный автомобильный ультразвуковой датчик состоит из пластикового корпуса, пьезоэлектрического преобразователя с прикрепленной к нему мембраной и печатной платы с электронной схемой и микроконтроллером для передачи, приема и обработки сигналов 9.