Новый компактный бесколлекторный электродвигатель | Наука и жизнь
В России запатентован новый электродвигатель необычной шарообразной конструкции. Его первые натурные испытания прошли успешно, двигатель использовался как лодочный мотор. Изобретатели уверены, что в будущем новый высокопроизводительный электродвигатель найдёт широкое применение.
Популярность электромобилей, электроскутеров, промышленных квадрокоптеров и других полезных устройств с электрическим двигателем стремительно растёт. Вместе с ними на рынок приходят всё более совершенные и компактные конструкции электродвигателей, которые способствуют тому, что электротранспорт становится более доступным для населения.
В 2020 году изобретатель Рубен Даниэльевич Меджлумян запатентовал (RU 2 726 153 C1) в России высокопроизводительный бесколлекторный электродвигатель. Он более лёгкий и компактный по сравнению с коллекторными двигателями такой же мощности при том же крутящем моменте на валу.
Бесколлекторный двигатель с редуктором
В последнее время активно возрос интерес к бесколлекторным или, как их ещё называют, «бесщёточным» двигателям постоянного тока, обеспечивающим более надежную, эффективную и менее шумную работу. В коллекторных двигателях постоянного тока ток передаётся на вращающуюся часть мотора (ротор) с помощью скользящих по коллектору контактов – щёток. Щётки со временем изнашиваются и могут вызвать искрение. Поэтому коллекторный двигатель не следует использовать для работ, где требуется длительный срок эксплуатации и надежность. Конструкция коллектора также увеличивает размеры и массу мотора.
Заявленный компанией двигатель мощностью 60 кВт будет весить не больше 9.7 кг, а диаметр не превысит 22 сантиметров. Скорость вращения топовой модификации двигателя составляет 30 000 оборотов в минуту при напряжении в 400 вольт, а пиковая мощность электродвигателя в линейке продукции – 95 кВт.
Скорость вращения топовой модификации двигателя составляет 30 000 оборотов в минуту при напряжении в 400 вольт, а пиковая мощность электродвигателя в линейке продукции – 95 кВт.
В частности, мотор диаметром 119 мм и массой 2.5 кг при мощности электродвигателя 1.5 кВт создаёт крутящий момент на валу 32 кгс при частоте вращения 3 700 оборотов в минуту.
Такие характеристики дают возможность устанавливать его на электромотоциклы, квадрокоптеры и даже на электромобили. Натурные испытания были проведены в 2020 году на реке Волга, где электродвигатель использовался в качестве лодочного мотора.
Лодочный мотор в корпусе
Конструкция электродвигателя выглядит следующим образом. Неподвижная наружная часть двигателя (статор) выполнена в виде сферы, на которую слоями намотаны катушки электромагнитов. Их полюса равномерно смещены относительно друг друга. Для компактности обмотка может быть выполнена из плоского провода в виде ленты, покрытой изоляцией.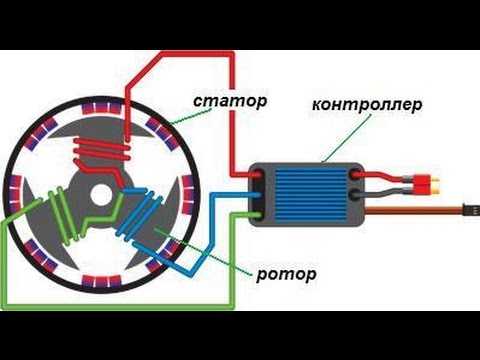
Как работает такой бесколлекторный электродвигатель? При подаче напряжения на одну из катушек статора она превращается в электромагнит, который, взаимодействуя с постоянным магнитом ротора, приводит его в движение. По мере поворота ротора питание контроллером переключается поочерёдно на следующую катушку, магнитные полюса которой смещены относительно предыдущей. Это приводит к непрерывному вращению ротора. В случае одной катушки в нужный момент времени производится переключение полярности полюсов электромагнита.
Использование нескольких обмоток обеспечивает бОльшую равномерность вращения. При этом увеличение количества катушек свыше 12 нецелесообразно, поскольку увеличивает массу и размеры мотора без существенного повышения крутящего момента. Конкретное количество катушек выбирается исходя из требований на габариты мотора.
Процесс намотки катушки мотора.
Из-за явления электромагнитной индукции переменное магнитное поле порождает в металлических деталях токи Фуко (вихревые индукционные токи), приводящие к их нагреву и потере энергии. Чтобы уменьшить этот нежелательный эффект, статоры синхронных и асинхронных электрических моторов изготовлены из набора изолированных между собой пластин из тонкого железа.
Компания «Buddha Energy Inc.» пошла иным путём и разработала корпус статора электродвигателя «HELV Motors» из композитных материалов, что позволило не только убрать эффект токов Фуко, но и уменьшить вес двигателя.
Любопытно, что идея создания сферического электродвигателя родилась не на базе теоретических изысканий, а на основе экспериментальной проверки взаимодействий магнитных полей ротора и статора. Расчет точного взаимодействия магнитных полей внутри композитов – задача непростая. Но команда проекта нашла свой оригинальный, нестандартный подход. На 3D-принтере был напечатан лабораторный стенд, на котором и проводились испытания нескольких десятков вариантов обмоток статора. В результате был найден вариант, который удерживал ротор наилучшим образом. Всё остальное было делом техники.
3D-модель первого лабораторного стенда
При механическом раскручивании вала извне, например, ветряком, водяной турбиной, двигателем автомобиля или любым другим устройством данный электродвигатель переходит в режим генератора и выдает электроэнергию, которая может быть накоплена или потреблена внешними устройствами.
Компания «Buddha Energy Inc.» пока не предоставила информацию о точной дате старта продаж двигателей «HELV Motors» в России, но есть надежда, что электродвигатели станут доступны на рынке в третьем квартале 2021 года.
E-mail: [email protected]
На правах рекламы
принцип действия и устройство, регуляторы оборотов, контроллер управления на ШИМ tda1085 • Мир электрики
Содержание
- Коллекторные электродвигатели
- Регуляторы оборотов для КД
- Особенности бесколлекторного двигателя
В настоящее время коллекторные двигатели получили широкое применение в быту и на производстве. Такие электромеханические устройства могут быть как постоянного, так и переменного тока. В зависимости от их предназначения возникает необходимость в изменении скорости вращения оборотов электродвигателя. С такой задачей может справиться тиристорный регулятор напряжения или симисторный регулятор мощности для электродвигателя.
Коллекторный двигатель (КД) представляет собой электрическую машину, которая преобразовывает электрическую энергию в механическую и обратно. Классифицируются КД по роду питающего тока, их разделяют на следующие группы:
- Питание постоянным током. Имеют простую конструкцию, высокий пусковой момент и управляются плавной регулировкой частоты вращения.
- Универсальные КД можно питать от постоянного и переменного напряжения. Основные достоинства: простота управления, недорогая стоимость и компактность.
КД постоянного тока в зависимости от типа индуктора могут быть на постоянных магнитах или дополнительных катушках возбуждения. Постоянные магниты создают необходимый магнитный поток, способствующий образованию вращающего момента. Двигатели, где применяются катушки возбуждения, различаются по типу обмоток.
Двигатели универсальные состоят из следующих элементов:
Коллектора.
- Щеткодержателей для фиксации щёток.
- Щёток (графитовых или медно-графитовых), служащих для электрического контакта между статорными обмотками и обмотками якоря.
- Статорного сердечника, как правило, состоящего из электротехнической стали.
- Обмотки статора.
- Вала якоря.

Такого типа КД могут быть с параллельным и последовательным возбуждением.
Универсальные двигатели могут работать также и от переменного напряжения, когда при смене полярности в обмотках возбуждения возникает наводящий ток необходимого направления для реверсирования вращения якоря (аверс/реверс). Для регулировки скорости вращения вала электродвигателя, используются различные электрические схемы регуляторов оборотов коллекторных двигателей.
Регуляторы оборотов для КД
Существует несколько типов управляющих схем для регулировки оборотов коллекторных двигателей. Для маломощных устройств с напряжением питания 12 В (вольт) можно использовать реостат или простейшую схему, собранную на транзисторе, за основу которой можно взять любой компенсационный стабилизатор постоянного тока с регулировкой напряжения.
Для плавной регулировки оборотов якоря более мощного КД необходим тиристорный регулятор напряжения постоянного тока. Для протекания тока через тиристор необходимо на его управляющий электрод подать кратковременный импульс. В зависимости от частоты поданных импульсов создаётся порог открывания тиристора, что изменяет величину напряжения на выходе регулятора оборотов. Частоту импульсов можно изменять, включив в схему регулятора генераторный транзистор, например, КТ117, или собрать схему управления на таймере 555 (КР1006ВИ1 отечественного производства).
Такой регулятор постоянного тока можно использовать только с КД постоянного напряжения. Используя тиристоры в высокоиндуктивной нагрузке, так как они могут не до конца закрыться, чревато для выхода из строя регулятора.
Регулировку рекомендуется производить с помощью регулятора оборотов коллекторного двигателя с обратной связью, который задаёт скорость вращения с помощью формирователя опорного напряжения в схеме. В момент нагрузки скорость вращения снижается, а вместе с ней вращающий момент.
В момент нагрузки скорость вращения снижается, а вместе с ней вращающий момент.
За счёт уменьшения противо-ЭДС между управляющим электродом и катодом тиристора возникшей в двигателе пропорционально увеличится напряжение управления на тиристоре. Увеличение величины напряжения, с малым фазовым углом, открывается тиристор и подаёт на двигатель максимальный ток.
Тиристор подбирается таким образом, чтобы пусковой ток КД не превышал его максимально допустимые параметры. Регулировку можно производить только на КД состоящих из щёточного узла.
Тиристорный регулятор по схематическим соображениям не может регулировать обороты асинхронных электродвигателей.
Особенности бесколлекторного двигателя
С виду бесколлекторный двигатель схож с КД, но по конструктивным особенностям имеется различие из-за отсутствия коллектора и щёток. В бесколлекторном двигателе постоянные магниты расположены вокруг вала, так называемого ротора, а обмотки находятся непосредственно на статоре вокруг ротора и имеют определённое количество пар полюсов, от которых зависит скорость мотора. Некоторые бесколлекторные моторы оснащаются сенсорными датчиками, предназначенными для слежения за положением ротора, и управляются электронными регуляторами скорости, собранными на контроллере.
В бесколлекторном двигателе постоянные магниты расположены вокруг вала, так называемого ротора, а обмотки находятся непосредственно на статоре вокруг ротора и имеют определённое количество пар полюсов, от которых зависит скорость мотора. Некоторые бесколлекторные моторы оснащаются сенсорными датчиками, предназначенными для слежения за положением ротора, и управляются электронными регуляторами скорости, собранными на контроллере.
Основными достоинствами бесколлекторных моторов являются отсутствие искрения щёток, создающих помехи, и отсутствие постоянного трения, повышающего температуру внутри двигателя. Отсутствие изнашивающихся частей — коллектора и щёток — увеличивает срок эксплуатации таких моторов, не считая замены подшипников. К недостаткам можно отнести лишь высокую стоимость изделия.
Особой популярностью пользуются однофазные асинхронные двигатели переменного тока, которые используют в различных станках на производстве, а также в бытовых электроприборах, где необходимо использовать разные скорости вращения. Для этих целей используется симисторный регулятор мощности для электродвигателя.
Для этих целей используется симисторный регулятор мощности для электродвигателя.
Регулятор оборотов асинхронного двигателя своими руками можно сделать на ШИМ-контроллере tda1085, который управляет симистором. Контроллер можно использовать для управления стиральной машиной совместно с таходатчиком, который считывает импульсы от тахогенератора. Регулирование оборотов осуществляется без потери мощности и независимо от нагрузки.
В чем разница и что лучше?
Электродвигатели постоянного токаявляются одними из самых важных изобретений, на которые в значительной степени опирается современный мир. Эти двигатели используются в бытовой технике, электроинструментах, дронах, системах охлаждения ПК, робототехнике и электромобилях.
Двумя наиболее распространенными электродвигателями постоянного тока, используемыми сегодня, являются щеточные и бесщеточные двигатели постоянного тока. Оба двигателя имеют одинаковую фундаментальную идею использования электромагнетизма для обеспечения механического вращения. Но с разными концепциями конструкции щеточные и бесщеточные двигатели неизбежно будут иметь свои различия в производительности, стоимости и обслуживании.
Оба двигателя имеют одинаковую фундаментальную идею использования электромагнетизма для обеспечения механического вращения. Но с разными концепциями конструкции щеточные и бесщеточные двигатели неизбежно будут иметь свои различия в производительности, стоимости и обслуживании.
Так какая конструкция двигателя лучше — щеточная или бесщеточная?
Как работает электродвигатель постоянного тока?
Электродвигатели преобразуют электричество в механическую энергию. Они делают это, позволяя электричеству проходить через медные обмотки, создавая электромагнитное поле, которое возбуждает постоянные магниты внутри двигателя, заставляя ротор двигаться и производить механическую энергию.
Хотя и щеточные, и бесщеточные двигатели имеют одну и ту же цель преобразования электричества в механическую энергию, их конструкции различаются. Чтобы понять их разницу, давайте поговорим о конструкции двигателя, начиная с коллекторного двигателя.
Коллекторные двигатели производятся уже более века. Известно, что они имеют упрощенную конструкцию, в которой используется пара угольных щеток для подачи мощности на двигатель. Коллекторные двигатели всегда будут состоять из четырех основных частей, а именно:
Известно, что они имеют упрощенную конструкцию, в которой используется пара угольных щеток для подачи мощности на двигатель. Коллекторные двигатели всегда будут состоять из четырех основных частей, а именно:
- Статор: Неподвижная часть двигателя. Он содержит постоянные магниты, которые заставляют ротор двигаться.
- Ротор: Вращающаяся часть двигателя. Он содержит медную катушку, которая при подаче питания делает медную катушку электромагнитной.
- Коммутатор: Металлическое кольцо, обеспечивающее вращение ротора путем изменения полярности на каждые пол-оборота ротора.
- Щетки: Неподвижная часть из углерода, непосредственно подсоединенная к клеммам источника питания. Они передают мощность на кольцо коммутатора, которое затем активирует ротор.
В щеточном двигателе щетки используются для электрического питания двигателя, позволяя вращаться как ротору, так и коллектору. Ротор состоит из медных обмоток, которые при подаче питания в основном становятся электромагнитом.
Ротор состоит из медных обмоток, которые при подаче питания в основном становятся электромагнитом.
Так что же произойдет, если два магнита сблизятся?
Что ж, в зависимости от расположения магнитных полюсов они либо притягиваются, либо отталкиваются друг от друга. Цель щеточного двигателя — использовать притяжение и отталкивание для вращения двигателя. Вот где коммутатор становится полезным.
Коммутатор представляет собой металлическое кольцо в центре ротора, которое переключает магнитный полюс ротора каждые 180 градусов. Это эффективно гарантирует, что магнитный полюс ротора всегда совпадает с одним и тем же магнитным полюсом статора, вызывая отталкивание.
Результат? Непрерывное механическое вращение имеет достаточную силу для питания блендера (или всего, что использует щеточный двигатель).
Бесщеточные двигатели начали набирать популярность в 1980-х годах, когда транзисторы стали более распространенными в электронике. Наличие легкодоступных полупроводниковых компонентов сыграло большую роль в создании бесщеточных двигателей для электроинструментов, бытовой техники и электроники. Их сложная, но эффективная конструкция дает бесщеточным двигателям больший крутящий момент, чем их щеточные аналоги.
Их сложная, но эффективная конструкция дает бесщеточным двигателям больший крутящий момент, чем их щеточные аналоги.
используется несколько основных частей. Они будут включать:
- Статор: Неподвижная часть двигателя. Он содержит несколько медных катушек, которые при включении питания становятся активным магнитом.
- Ротор: Вращающаяся часть двигателя. Он содержит постоянные магниты, которые вращаются из-за электромагнитного поля между статором и ротором.
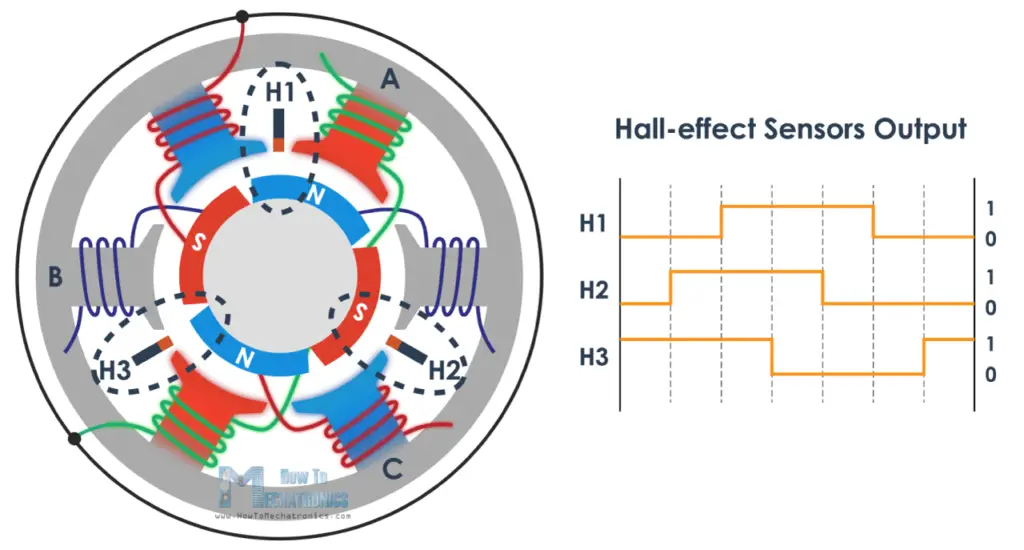
- Датчик Холла: Датчик, определяющий, какие катушки находятся под напряжением, а какие нет.
- Цепь управления: Электронная схема, предназначенная для определения того, на какие катушки внутри статора подавать питание.
Как следует из названия, бесщеточные двигатели не используют щетки для питания двигателя. Бесщеточные двигатели также не имеют токоведущих коллекторов. Вместо этого он использует датчик Холла и схему управления, чтобы обеспечить постоянное выравнивание противоположных магнитных полюсов статора и ротора. Еще одна особенность, которую вы обнаружите, заключается в том, что в статоре находятся медные обмотки, а в роторе — постоянные магниты.
Вместо этого он использует датчик Холла и схему управления, чтобы обеспечить постоянное выравнивание противоположных магнитных полюсов статора и ротора. Еще одна особенность, которую вы обнаружите, заключается в том, что в статоре находятся медные обмотки, а в роторе — постоянные магниты.
Бесщеточный двигатель в основном работает так же, как щеточный двигатель: использует разницу в магнитных полюсах для перемещения ротора, создавая вращение и крутящий момент.
Но как медные обмотки без щеток и коммутаторов получить питание?
Просто, вы делаете медные обмотки стационарными. Щетки больше не нужны со стационарными медными обмотками, так как вы можете напрямую питать катушки через провода.
Что касается коммутаторов, то в бесколлекторном двигателе используется датчик Холла и схема управления. Датчик Холла представляет собой плоский круглый датчик, расположенный рядом с медными обмотками статора. Поскольку в статоре находится несколько катушек, датчик Холла может определить, находится ли одна из этих катушек под напряжением или нет.
Сделано с помощью Sketchup.
Затем датчик передает показания в схему управления и решает, на какие катушки подать питание. Таким образом, если постоянные магниты ротора приближаются к притягивающим магнитным полюсам, схема управления перестанет подавать питание на эти катушки и подаст питание на следующую катушку, которая притягивает постоянные магниты ротора. Схема управления также возбуждает катушки перед постоянными магнитами, вызывая отталкивание и добавляя еще больший крутящий момент к вращению.
Плюсы и минусы щеточных и бесщеточных двигателей
Учитывая различия в конструкции двигателей, как у щеточных, так и у бесщеточных двигателей есть свои плюсы и минусы. Вот таблица, которая поможет вам понять их сильные и слабые стороны:
Brushed Motor | Brushless Motor | |
|---|---|---|
Lifespan | Short | Long |
Acceleration | Medium | High |
Efficiency | Medium | High |
Torque | Medium | High |
Акустика | Шумная | Тихая |
Стоимость | Недорогой | Дорогой (со схемой управления) |
Стоит ли покупать оборудование с щеточным или бесщеточным двигателем?
Изображение предоставлено: Вероник Дебор-Лазаро/Flickr Как видно из таблицы, бесщеточные двигатели лучше по всем параметрам (кроме стоимости), чем их щеточные аналоги. Они обеспечивают более высокий крутящий момент, более быстрое ускорение, более низкий уровень шума и более высокую эффективность, а также более долговечны.
Они обеспечивают более высокий крутящий момент, более быстрое ускорение, более низкий уровень шума и более высокую эффективность, а также более долговечны.
Поэтому, когда у вас есть возможность купить новый электроинструмент, кухонный прибор, дрон или что-то еще, что нуждается в двигателе, выбор предметов с бесщеточным двигателем, как правило, является лучшим вариантом.
Значит, коллекторные двигатели должны быть устаревшими?
Нет. Тем более, что бесщеточный двигатель (плюс схема управления) будет стоить значительно дороже, чем элемент, использующий коллекторный двигатель. И хотя бесщеточный двигатель лучше, чем его щеточный аналог, это не значит, что щеточный двигатель плохой. На самом деле, коллекторный двигатель очень хорош. Вы можете выполнять те же задачи с коллекторным двигателем, что и с бесщеточным.
Как правило, бесщеточные двигатели идеально подходят для ваших инструментов и оборудования. Но есть также ситуации, когда вы можете вместо этого использовать коллекторные двигатели. К таким ситуациям относятся:
К таким ситуациям относятся:
- Когда двигатель используется кратковременно (например, блендер, сиденья с электроприводом и стеклоочистители)
- Когда инструмент/приспособление становится полезным лишь несколько раз в год
- Когда задача не требует большого крутящего момента ( например, игрушки, вентиляционные отверстия)
- В экстремальных условиях эксплуатации. Коллекторным двигателям не нужны датчики или схемы управления, которые могут выйти из строя в экстремальных погодных условиях
Разумные покупки
Теперь, когда вы понимаете разницу между щеточными и бесщеточными двигателями, вам, надеюсь, будет легче совершать разумные покупки при покупке кухонной техники, инструментов и оборудования. Это также должно объяснить, почему некоторые элементы стоят дороже, чем их аналоги, даже если они производятся одной и той же маркой, имеют те же функции и используют тот же форм-фактор. Помните, что только потому, что вы можете купить предмет премиум-класса с бесщеточным двигателем, не всегда означает, что покупать его разумно.
Повышение производительности — замена щеточного двигателя постоянного тока на двигатель постоянного тока BLDC
Простой ответ на вопрос, возможна ли замена щеточного двигателя постоянного тока бесщеточными двигателями постоянного тока, — да.
Многие компании все чаще заменяют двигатели постоянного тока бесщеточными двигателями постоянного тока в самых разных областях применения. Основная причина этого заключается в том, что двигатели и контроллеры BLDC обеспечивают увеличенный срок службы, улучшенную удельную мощность и улучшенные механические характеристики.
Другими словами, они обеспечивают большую мощность при меньшем размере, служат дольше и работают быстрее (если вы этого хотите)! Тем не менее, есть ряд вещей, о которых вам необходимо знать при рассмотрении вопроса о замене коллекторного двигателя постоянного тока бесщеточным двигателем постоянного тока и контроллером.
На что следует обратить внимание при замене двигателя постоянного тока на бесщеточный двигатель постоянного тока
Ключом к успешному переходу является знание рабочих характеристик и основных характеристик двигателя постоянного тока, который вы хотите заменить, а затем возможность его замены. хорошо сочетается с бесколлекторным двигателем постоянного тока и контроллером
хорошо сочетается с бесколлекторным двигателем постоянного тока и контроллером
Когда у вас есть эта спецификация, вы можете приступить к поиску двигателей с нужными электрическими характеристиками. Важно помнить, что это не обязательно должен быть исчерпывающий список, но обычно достаточно сосредоточиться на требованиях к крутящему моменту и скорости, а также на физических размерах вала и корпуса двигателя.
Также важно иметь четкое описание того, чего вам нужно достичь в рамках вашего продукта или приложения. Это может показаться очевидным, но незначительно отличающийся диаметр или длина вала, длина или размер корпуса двигателя могут существенно повлиять на пригодность двигателя для замены.
Всегда помните, что вам также потребуется использовать контроллер бесщеточного двигателя или бесщеточный ESC для управления бесщеточным двигателем, поэтому убедитесь, что у вас также есть место для этого в необходимом вам пространстве. Поэтому необходимо будет подумать о том, где контроллер будет установлен в приложении. Всегда лучше установить его как можно ближе к двигателю, чтобы обеспечить наилучшую возможную производительность, но если это невозможно в вашем приложении, наша команда будет рада посоветовать.
Всегда лучше установить его как можно ближе к двигателю, чтобы обеспечить наилучшую возможную производительность, но если это невозможно в вашем приложении, наша команда будет рада посоветовать.
Выбор подходящего драйвера двигателя или контроллера BLDC для вашего приложения
Как упоминалось выше, для бесщеточных двигателей вам потребуется контроллер бесщеточного двигателя (иногда известный как бесщеточный драйвер двигателя ESC или BLDC), такой как драйвер бесщеточного двигателя ZDBL5. для того, чтобы управлять двигателем.
Это связано с тем, что подача прямого питания на бесщеточный двигатель просто зафиксирует его в одном положении. Следовательно, чтобы заставить двигатель вращаться, вам нужен двигатель, контроллер и способ сообщить контроллеру, что вы хотите, чтобы он делал.
Если вы использовали очень простой двигатель постоянного тока, то вполне вероятно, что вы просто захотите подать напряжение и ток и заставить двигатель вращаться с той же скоростью и крутящим моментом, что и раньше.
Если это так, мы можем помочь.
Наши инженеры могут индивидуально запрограммировать серию ZDBL так, чтобы рабочие характеристики максимально соответствовали ранее установленному двигателю постоянного тока. Это займет немного времени, чтобы сделать это правильно, но как только он будет настроен, мы просто назначим номер детали, и вы сможете заказать тот же предварительно запрограммированный контроллер на досуге.
Кроме того, если вам нужно что-то более индивидуальное, чтобы соответствовать некоторым необычным характеристикам или помочь выполнить сложную спецификацию, мы можем разработать специальный контроллер для вашего конкретного приложения.
Если это то, что вы ищете, мы настоятельно рекомендуем вам связаться с нами по электронной почте или в онлайн-чате, предоставив техпаспорт или номер детали двигателя, который вы хотите заменить. Затем мы рассмотрим лучшие доступные варианты и вернемся к вам с предложением. Конечно, если у вас есть какие-либо вопросы по этому поводу, пожалуйста, не стесняйтесь звонить нам.
Более точное управление двигателем
Однако, если вы ищете что-то с более точным управлением, то использование контроллера бесщеточного двигателя серии ZDBL позволит вам управлять скоростью двигателя несколькими способами.
Например, скоростью можно управлять с помощью внешнего оборудования, такого как потенциометры, или с помощью аналогового входа напряжения 0–5 В (на контроллер бесщеточного двигателя), или с помощью ряда коммуникационных протоколов, поступающих от ПЛК или другого устройства. центральный контроллер.
Заключение
Стоит еще раз подчеркнуть важность физического размера двигателя при внесении изменений, поскольку мы работали с некоторыми клиентами, которые нашли идеальные характеристики двигателя с точки зрения крутящего момента и скорости, но которые упустили тот факт, что бесщеточный двигатель, который они выбрали, имел 5-миллиметровый вал, когда им нужен был 4-миллиметровый вал для прямой замены.
Разница в 1 мм может занять огромное количество времени и денег, поэтому обязательно проверьте.