
16 Электромеханические характеристики электродвигателей постоянного тока
15. Электромеханические характеристики электродвигателей постоянного тока.
В зависимости от способа подачи напряжения на обмотку возбуждения и обмотку якоря электрические машины постоянного тока делятся на:
1. генераторы (двигатели) с независимым возбуждением;
2. генераторы (двигатели) с самовозбуждением.
В зависимости от способа соединения обмотки якоря и обмотки возбуждения электрические машины с самовозбуждением делятся на:
1. генераторы (двигатели) с параллельным возбуждением;
2. генераторы (двигатели) с последовательным возбуждением;
3. генераторы (двигатели) смешанного возбуждения, имеют две обмотки возбуждения.
Электромеханические характеристики снимаются на электродвигателе — одна величина электрическая (Iн), другая- механическая (n или Мвр).
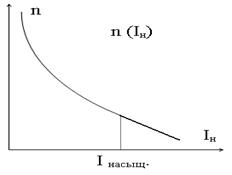
Электромеханические характеристики – это скоростная электромеханическая характеристика зависимости частоты вращения якоря от тока нагрузки n(Iн) и характеристика зависимости вращающего момента от тока нагрузки Мвр(Iн). Электромеханические характеристики снимаются при неизменном подаваемом напряжении.
15.1. Электродвигателя с параллельным возбуждением.
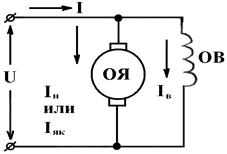 При изменении нагрузки (при изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и не будет изменяться в обмотке возбуждения.
При изменении нагрузки (при изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и не будет изменяться в обмотке возбуждения.
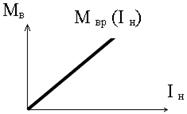
Mвр = См х ф х Iн ; С м = Const, ф = Const т.к. Iв = Const
Вращающийся момент зависит только от тока нагрузки и характеристика будет иметь вид прямой линии.
Зависимость вращающегося момента от тока нагрузки. |
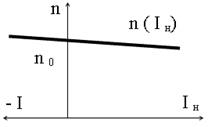
Скоростная электромеханическая характеристика. |
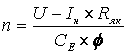 , U =Const, С E = Const, ф = Const
, U =Const, С E = Const, ф = Const
При увеличении нагрузки частота вращения якоря будет уменьшаться только из-за увеличения падения напряжения в обмотке якоря. Но, т.к. сопротивление обмотки якоря мало, то и падение напряжения в обмотке якоря мало и составляет примерно 4 % от номинального напряжения при номинальном токе. Характеристика будет иметь вид прямой линии с малым наклоном и называется жесткой (когда при изменении одной величины в широких пределах другая величина изменяется незначительно).
При уменьшении нагрузки частота вращения якоря увеличивается, противо Э.Д.С. возрастает и при какой-то n0 величина наводимой в обмотке якоря Э.Д.С. сравнивается с приложенным напряжением.
 При дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель автоматически перешел в генераторный режим.
При дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель автоматически перешел в генераторный режим.
Электромеханические характеристики для двигателя с независимым возбудителем, имеют внешний вид, подобный электромеханическим характеристикам двигателя с параллельным возбуждением из-за Ф = Const.
15.2.Электродвигателя с последовательным возбудителем.
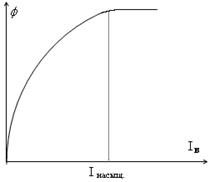
Ток нагрузки равен току якоря и току возбуждения. При изменении нагрузки будет изменяться ток в обмотке якоря и одновременно в обмотке возбуждения, а, значит, будет изменяться и магнитный поток в соответствии с кривой намагничивания
|
Кривая намагничивания. |
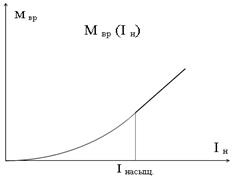
Mвр = См х Ф х Iн ; Ф = Iн х w / R магн ; Mвр = См х w/Rмагн х I2н,
где w — число витков.
Вращающий момент зависит от тока в квадрате и характеристика будет иметь вид параболы. Так происходит до магнитного насыщения полюсов. При дальнейшем увеличении нагрузки магнитный поток будет оставаться неизменным, вращающий момент будет зависеть только от тока и характеристика переходит в прямую линию.
Зависимость вращающегося момента от тока нагрузки. |
Скоростная электромеханическая характеристика. |
 При увеличении нагрузки частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в обмотках двигателя и, в большей степени, из-за увеличения магнитного потока, что вызывает резкое понижение частоты вращения якоря. По мере роста тока нагрузки замедляется рост магнитного потока, а затем наступает магнитное насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении нагрузки магнитный поток остается постоянным, частота вращения якоря понижается только из-за увеличения падения напряжения в
При увеличении нагрузки частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в обмотках двигателя и, в большей степени, из-за увеличения магнитного потока, что вызывает резкое понижение частоты вращения якоря. По мере роста тока нагрузки замедляется рост магнитного потока, а затем наступает магнитное насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении нагрузки магнитный поток остается постоянным, частота вращения якоря понижается только из-за увеличения падения напряжения в
обмотках двигателя. Характеристика переходит в прямую линию.
Скоростная электромеханическая характеристика мягкая.
При уменьшении нагрузки частота вращения увеличивается, но уменьшается и магнитный поток. Поэтому, наводимая противо Э.Д.С. в обмотке якоря не может преодолеть приложенное напряжение. Электродвигатели с последовательным возбуждением автоматически не переходят в генераторный режим.
Механические и электромеханические характеристики двигателей постоянного тока.
Область применения.
Двигатели постоянного тока подразделяют на двигатели с независимым, последовательным и смешанным возбуждением. Двигатели с независимым возбуждением применяют, как правило, для длительного режима работы, когда требуется широкое регулирование скорости вращения станочного электропривода трубопроката, листо-прокатных станов и т.д. Эти двигатели реже применяются в режиме повторно кратковременной нагрузки, где требуется устойчивая постоянная и полная скорость. Двигатели постоянного тока с независимым возбуждением (ДПТ НВ) широко применяют в системе регулирования генератора-двигателя, в системе ТПД, в системе ШИР-Д (широко-импульсное регулирование-двигатель).
Двигатель последовательного возбуждения применяют для вспомогательных механизмов прокатных станов, для подъемных кранов на приводах хода моста и хода тележки. При их применении на кранах, уменьшается число троллей.
ДПТ ПВ широко используют на транспорте. Постоянный ток здесь удобен тем, что при нем достаточно иметь один троллей, а последовательное возбуждение по той причине, что двигатель при этом не боится больших снижений напряжения, которые имеют место при питании троллем на большие расстояния и лучше выдерживает перегрузку на подъемах и спусках, благодаря тому, что с увеличением тока растет момент.
Двигатель с последовательным возбуждением надежнее, чем другие двигатели постоянного тока, потому что у него обмотка возбуждения выполнена проводом большего сечения, и обмотка возбуждения имеет ничтожно малое напряжение между витками.
Двигатель со смешанным возбуждением применяется редко, работает в механизмах с циклической нагрузкой. Как правило используется динамическое торможение на остановке, работает с большей частотой включения, при которой требуется принудительное охлаждение воздухом продуваемого через двигатель.
Механические и электромеханические характеристики.
ДПТ НВ:
При рассмотрении механических характеристик двигателя считают, что источник питания или сеть бесконечной мощности, ее внутреннее сопротивление близко к нулю, напряжение сети неизменно Uс=const.
Поэтому цепи возбуждения и якоря не зависят друг от друга. Не зависят эти цепи друг от друга и потому, что во многих системах привода для обмотки возбуждения используется отдельный источник питания.
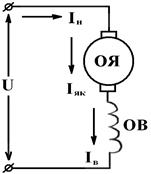
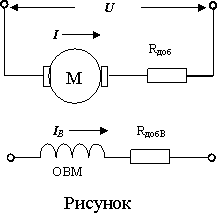
Схема двигателя постоянного тока с независимым возбуждением следующая:

КО – компенсационная обмотка;
ДП – обмотка дополнительных полюсов;
rпя– дополнительное сопротивление, включенное последовательно с якорем;
rпв– дополнительное сопротивление, включенное последовательно с обмоткой возбуждения.
Uся=Е+Iя(rя+rпя)– для якоря;
Uc
Е=КФw; ;
;
Ф – магнитный поток;
w– угловая скорость;
К – конструкторский коэффициент;
Р – число пар полюсов;
N– число активной проводимости релейной ветви;
а – число параллельных ветвей обмоток якоря.
Uся=КФw+Iя(rя+rпя);
Связь между моментом и током М = КФIя
 .
.
Уравнение
характеристики представляет из себя
прямую линию, которой отсекают от оси
ординат отрезок  ,w0– скорость
идеального холостого хода.
,w0– скорость
идеального холостого хода.
Из выражения механических и электромеханических характеристик видно, что при Ф=constэлектромеханические и механические характеристики представляют собой прямую линию пересекающую ось координат.
 ;
;
Из графических выражений характеристику можно выразить следующим образом:
 ;
;
Варьируя величинами Uс, rпя
Механическая характеристика двигателя постоянного тока
 Полная механическая характеристика двигателя постоянного тока позволяет правильно определиться с основными свойствами электродвигателя, а также проконтролировать их соответствие всем требованиям, предъявляемым на сегодняшний день к машинам или устройствам технологического типа.
Полная механическая характеристика двигателя постоянного тока позволяет правильно определиться с основными свойствами электродвигателя, а также проконтролировать их соответствие всем требованиям, предъявляемым на сегодняшний день к машинам или устройствам технологического типа.Особенности конструкции
С конструктивной точки зрения все виды ДПТ представлены:
- роторной или якорной частью в виде большого количества катушечных элементов, покрытых специальной токопроводящей обмоткой;
- статичным индуктором в виде стандартной станины, дополненной несколькими магнитными полюсами;
- функциональным щеточным коллектором цилиндрической формы, располагающимся на валу и имеющим медную пластинчатую изоляцию;
- статично зафиксированными контактными щетками, используемыми с целью подведения достаточного количества электротока на роторную часть.
Как правило, электрические двигатели ПТ оснащаются специальными щетками графитового и медно-графитного типа. Вращательные движения вала провоцируют замыкание и размыкание контактной группы, а также способствуют искрению.
Определенное количество механической энергии поступает от роторной части к другим элементам, что обусловлено наличием передачи ременного типа.
Принцип функционирования
Синхронные устройства обращенного функционала характеризуются сменой выполнения задач статором и ротором. Первый элемент служит для возбуждения магнитного поля, а второй в этом случае преобразует достаточное количество энергии.
Якорное вращение в условиях магнитного поля наводится при помощи ЭДС, а движение направлено в соответствии с правилом правой руки. Поворот на 180о сопровождается стандартной сменой движения ЭДС.

Принцип действия двигателя постоянного тока
Коллекторы посредством щеточного механизма соединяются с двумя витковыми сторонами, что провоцирует удаление пульсирующего напряжения и вызывает образование постоянных токовых величин, а снижение якорной пульсации осуществляется добавочными витками.
Механическая характеристика
На сегодняшний день эксплуатируются электромоторы ПТ нескольких категорий, имеющие различные виды возбуждения:
- независимого типа, при котором обмоточное питание определяется независимым источником энергии;
- последовательного типа, при котором подключение якорной обмотки выполняется в последовательном направлении с обмоточным элементом возбуждения;
- параллельного типа, при котором роторная обмотка подключается в электрической цепи в параллельном для источника питания направлении;
- смешанного типа, основанном на наличии нескольких последовательных и параллельных обмоточных элементов.

Механическая характеристика двигателя постоянного тока независимого возбуждения ДПТ
Механические моторные характеристики подразделяются на показатели естественного и искусственного вида. Неоспоримые преимущества ДПТ представлены повышенными показателями производительности и увеличенным КПД.
Благодаря особым механическим характеристикам устройства с постоянными токовыми величинами способны легко переносить негативные внешние воздействия, что объясняется закрытым корпусом с уплотнительными элементами, абсолютно исключающими попадание влаги внутрь конструкции.
Модели независимого возбуждения
Моторы ПТ НВ обладают обмоточным возбуждением, подключаемым к отдельному виду источника для электрического питания. В таком случае обмоточная цепь возбуждения ДПТ НВ дополняется реостатом регулировочного типа, а якорная цепь снабжается добавочными или пусковыми реостатными элементами.
Отличительной особенностью такого вида мотора является независимость токового возбуждения от якорного тока, что обуславливается независимым питанием обмоточного возбуждения.

Характеристики электродвигателей с независимым и параллельным возбуждением
Линейная механическая характеристика при независимом типе возбуждения:
- ω — показатели вращательной частоты;
- U — показатели напряжения на эксплуатируемой якорной цепи;
- Ф — параметры магнитного потока;
- Rя и Rд — уровень якорного и добавочного сопротивления;
- Α — константа конструкции движка.
Данным типом уравнения определяется зависимость вращательной скорости мотора к моменту вала.
Модели последовательного возбуждения
ДПТ с ПТВ представляют собой устройство электрического типа с постоянными токовыми величинами, имеющими обмотку возбуждения, последовательно подключенную к якорной обмотке. Данный тип движков характеризуется справедливостью следующего равенства: током, протекающим в обмотке якоря, равным током обмоточного возбуждения, или I=Iв=Iя.

Механические характеристики при последовательном и смешанном возбуждении
При использовании последовательного типа возбуждения:
- n0 — показатели частоты вращения вала в условиях холостого хода;
- Δn — показатели изменения частоты вращения в условиях механической нагрузки.
Смещение механических характеристик вдоль оси ординат позволяет им оставаться в полностью параллельном расположении друг другу, благодаря чему регулирование вращательной частоты при изменении данного напряжения U, подведенного к якорной цепи, становится максимально благоприятным.
Модели смешанного возбуждения
Для смешанного возбуждения свойственно расположение между параметрами устройств параллельного и последовательного возбуждения, чем легко обеспечивается значительность пускового момента и полностью исключается любая возможность «разноса» движкового механизма в условиях холостого хода.
В условиях смешанного типа возбуждения:

Двигатель смешанного возбуждения
Регулировка частоты моторного вращения при наличии возбуждения смешанного типа осуществляется по аналогии с двигателями, имеющими параллельное возбуждение, а варьирование МДС-обмоток способствует получению практически любой промежуточной механической характеристики.
Уравнение механической характеристики
Наиболее важные механические характеристики ДПТ представлены естественными и искусственными критериями, при этом первый вариант сравним с номинальным напряжением питания в условиях полного отсутствия добавочного сопротивления на обмоточных цепях мотора. Несоответствие любому из заданных условий позволяет рассматривать характеристику в качестве искусственной.
ω = Uя/ kФ — ( Rя + Rд)/( kФ)
Это же уравнение может быть представлено в форме ω = ω о.ид. — Δ ω, где:
- ω о.ид. = Uя/kФ
- ω о.ид — показатели угловой скорости холостого идеального хода
- Δ ω = Мэм. [(Rя+Rд)/(kФ)2]— снижение показателей угловой скорости под воздействием нагрузки на вал мотора при пропорциональном сопротивлении цепи якоря
Характеристики уравнения механического типа представлены стандартной устойчивостью, жесткостью и линейностью.
Заключение
Согласно применяемым механическим характеристикам любые ДПТ отличаются конструктивной простотой, доступностью управления и возможностью осуществлять регулировку частоты валового вращения, а также легкостью пуска ДПВ. Кроме прочего, такие устройства могут применяться в качестве генератора и обладают компактными габаритами, что хорошо нивелирует недостатки в виде быстро изнашиваемых графитовых щеток, высокой себестоимости и необходимости обязательно подключать токовые выпрямители.
Видео на тему
Электромеханические свойства электродвигателей
3.1 Естественные и искусственные электромеханические и механические характеристики двигателя постоянного тока независимого возбуждения
П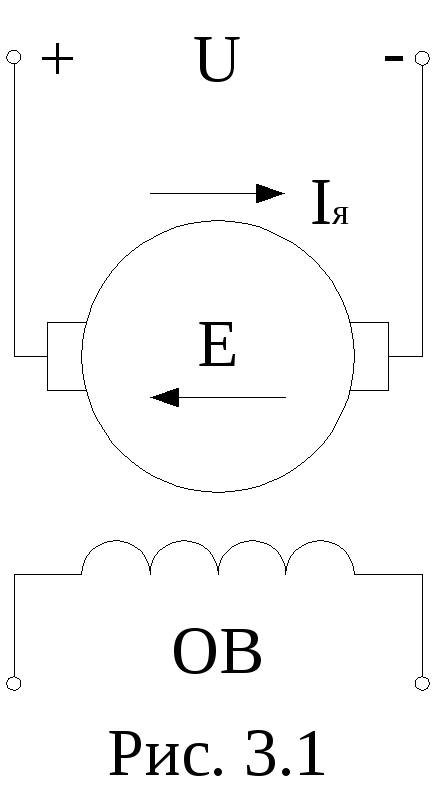 ринципиальная
схема двигателя независимого возбуждения
(ДНВ) изображается так, как показано на
рис. 3.1.
ринципиальная
схема двигателя независимого возбуждения
(ДНВ) изображается так, как показано на
рис. 3.1.
Обмотка возбуждения (ОВ) питается от независимого источника постоянного тока. При подключении ОВ к обмотке якоря машина превращается в двигатель параллельного возбуждения. Для регулируемых электроприводов обычно используется ДНВ.
Процессы электромеханического преобразования энергии ДНВ описываются следующими уравнениями.


Здесь 
 –электромагнитная
постоянная обмотка возбуждения
–электромагнитная
постоянная обмотка возбуждения  .
.
 –электромагнитная
постоянная обмотка якоря
–электромагнитная
постоянная обмотка якоря  .
.
К
– конструктивный коэффициент, равный  ,
где
,
где
N – число активных проводников обмотки якоря;
 –число
пар полюсов машины;
–число
пар полюсов машины;
a – число пар параллельных ветвей обмотки якоря;
 –ЭДС
вращения якоря;
–ЭДС
вращения якоря;
 –коэффициент
ЭДС машины;
–коэффициент
ЭДС машины;
 –сопротивление
обмотки якоря;
–сопротивление
обмотки якоря;
 –сопротивление
обмотки добавочных полюсов;
–сопротивление
обмотки добавочных полюсов;
 –сопротивление
компенсационной обмотки (для машины
мощностью 100 и выше кВт).
–сопротивление
компенсационной обмотки (для машины
мощностью 100 и выше кВт).
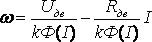
Обычно ДНВ работает при Ф=Фн=const. При этом выше написанные уравнения линеаризуются и после преобразований (решение относительно скорости ω) получим уравнение электромеханической характеристики.
Выразив
ток якоря через момент  ,
получим уравнение механической
характеристики
,
получим уравнение механической
характеристики

В
установившимся режиме  .
Поэтому уравнения запишутся в следующем
виде:
.
Поэтому уравнения запишутся в следующем
виде:
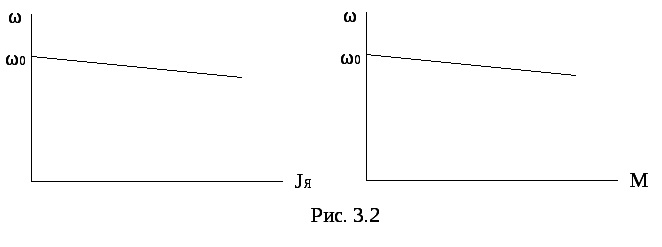
Эти
уравнения показывают, что при U=Uя=const
и ф=const
характеристики являются прямыми с
начальной ординатой  ,
соответствующей скорости идеального
холостого хода двигателя (рис. 3.2).
,
соответствующей скорости идеального
холостого хода двигателя (рис. 3.2).
Характеристики, соответствующие отсутствию в цепи якоря добавочного сопротивления, являются естественными. Статическую жесткость характеристики, определяющую ее наклон, можно найти, продифференцировав выражение момента М по скорости ω, найдя предварительно М из уравнения механической характеристики.
 ;
; 
Модуль статической жесткости
Используя понятие жесткости, уравнение статической механической характеристики ДНВ можно представить в виде:
Чем больше модуль жесткости естественной механической характеристики, тем стабильнее является скорость ω электропривода при широких пределах изменения его нагрузки.
Другой оценкой стабильности рабочей скорости ω является статизм механической характеристики, количественной оценкой которого служит номинальный перепад скорости.
 ,
где
,
где
 –скорость
идеального холостого хода на естественной
характеристике.
–скорость
идеального холостого хода на естественной
характеристике.
Относительный перепад скорости для двигателей
большой мощности составляет (1,53)%.
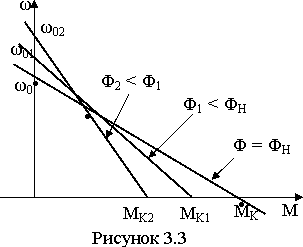
На вид естественных механической и электромеханический характеристик значительное влияние оказывает реакция якоря, ослабляющая магнитный поток машины. Из-за ее размагничивающего действия в механической характеристике двигателя могут появиться участки с положительной жесткостью (рис. 3.3, участок а-б), что приводит к неустойчивости электропривода.
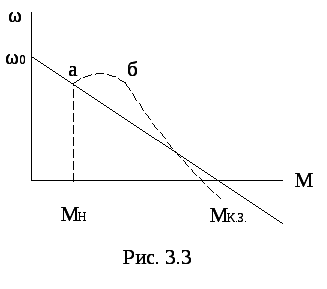
Реакция якоря, может снизить магнитный поток двигателя на 10-20%, вследствие чего уменьшится его перегрузочная способность. Она неблагоприятно сказывается и на динамических свойствах электропривода. Поэтому в двигателях без компенсационной обмотки мощностью до 100 кВт применяют так называемую стабилизирующую обмотку, размещаемую на сердечниках главных полюсов. Она включается цепь якоря последовательно и создает небольшую МДС, компенсирующую действие реакции якоря. Но двигатели с такой обмоткой нельзя применять для реверсивных электроприводов, т.к. при изменении направления вращения ток якоря имеет противоположное направление, и стабилизирующая обмотка будет усугублять действие реакции якоря.
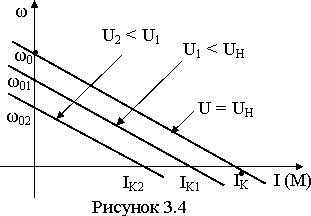
Отметим,
что механическая характеристика ДНВ
представляет собой зависимость
от электромагнитного момента М двигателя.
Если же изобразить зависимость
от момента на валу, то это будет не
прямая, а ломанная (рис. 3.4). В двигательном
режиме  ,
а в тормозном (генераторном)
,
а в тормозном (генераторном) (пунктирная линия). При=0
возникает разрыв непрерывности. Это
создает неудобства при расчетах. Поэтому
момент
(пунктирная линия). При=0
возникает разрыв непрерывности. Это
создает неудобства при расчетах. Поэтому
момент  прибавляют к нагрузке (кМс)
и характеристику двигателя считают
линейной.
прибавляют к нагрузке (кМс)
и характеристику двигателя считают
линейной.

Часто для удобства расчетов уравнение механической характеристики представляют в относительных единицах. Характеристики двигателей, различных по своим номинальным данным, становятся универсальными. В относительных единицах напряжение, ЭДС, ток, момент, магнитный поток, скорость можно представить в следующем виде:

(для
двигателей последовательного и смешанного
возбуждения  ),
), ,
где
,
где – номинальное сопротивление, т.е.
сопротивление якорной цепи, которое
при приложении к якорю номинального
напряжения и ω=0 ограничивает ток в якоре
до
– номинальное сопротивление, т.е.
сопротивление якорной цепи, которое
при приложении к якорю номинального
напряжения и ω=0 ограничивает ток в якоре
до  (см. рис. 3.5).
(см. рис. 3.5).
Для написания уравнения механической характеристики относительных единицах разделим обе части уравнения механической характеристики на ω0.
 ,
отсюда
,
отсюда
 .
.
т.е. 
Т.к.
у ДНВ при Ф=const
МIя,
то  и
и .
.
Это уравнение электромеханической характеристики в относительных единицах.
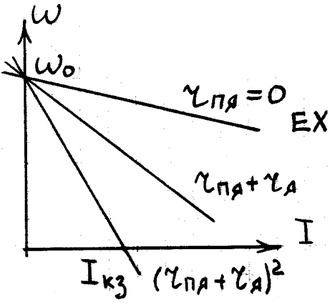
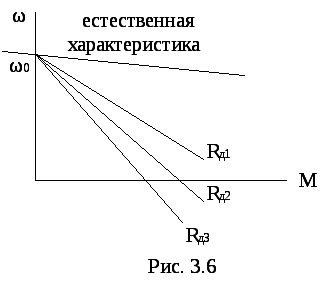
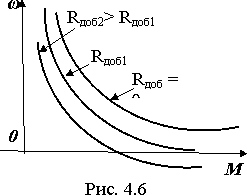
Характеристики двигателя, соответствующие изменениям параметров двигателя или специальным схемам его включения, являются искусственными. Так, при введении в цепь якоря добавочного сопротивления наклон характеристик увеличивается, их жесткость уменьшается. Семейство механических характеристик, соответствующих различным значениям Rдоб, изображено на следующем рис. 3.6. Скорость якоря двигателя при этом уменьшается, ибо увеличивается падение напряжения на якоре, уменьшается ток, а следовательно и вращающий момент. Отсюда видна возможность регулирования скорости двигателя изменением сопротивления в якорной цепи.
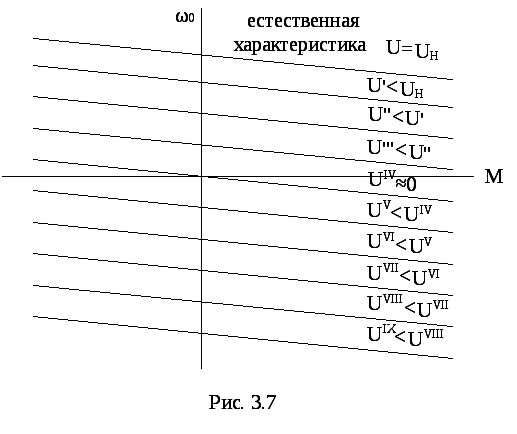
При
изменении напряжения, подводимого
двигателю, изменяется скорость идеального
холостого хода  ,
а жесткость характеристик остается
неизменной. Семейство механических
характеристик, соответствующих различным
напряжениям на якоре, изображено на
рис. 3.7. Для получения таких характеристик
двигатель нужно питать от источника,
напряжение которого можно регулировать.
Это позволяет регулировать скорость
двигателя.
,
а жесткость характеристик остается
неизменной. Семейство механических
характеристик, соответствующих различным
напряжениям на якоре, изображено на
рис. 3.7. Для получения таких характеристик
двигатель нужно питать от источника,
напряжение которого можно регулировать.
Это позволяет регулировать скорость
двигателя.
Для ряда производственных механизмов в соответствие с требованиями технологического процесса иногда возникает необходимость увеличения рабочей скорости, превышающей скорость при U= UН и φ=φН. Этого достигается ослаблением магнитного потока двигателя (уменьшением тока возбуждения).
Если
уменьшенное значение магнитного потока,
равно  ,
где<1,
то новое, увеличенное значение скорости
идеального холостого хода будет
,
где<1,
то новое, увеличенное значение скорости
идеального холостого хода будет
 .
.
При ослабленном потоке и прежнем значении момента ток якоря увеличивается. Его можно найти из уравнения момента
 ,
откуда
,
откуда
Уравнение механической характеристики при ослабленном потоке будет
 ,
где
,
где
 –перепад
скорости при номинальном потоке.
–перепад
скорости при номинальном потоке.

Ослабление потока вызывает увеличение не только 0, но и скорости якоря двигателя (при нагрузках, допустимых по условиям коммутации), что, собственно, и требуется. Но при нагрузках, не допустимых по условиям коммутации, скорость будет уменьшаться, и двигатель может перейти в тормозной режим, что отраженно на рис. 3.8, где изображено семейство механических характеристик двигателя, соответствующих различным значениям магнитного потока.
Электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения (дпт нв)
Электромеханические и электромагнитные процессы в ДПТ НВ (рисунок 1) описываются уравнениями электрического равновесия (Кирхгофа) цепей якоря и обмотки возбуждения, а также уравнением электромагнитного момента:
 (2.1)
(2.1)
Из совместного решения системы уравнений (2.1) получаем уравнение электромеханической характеристики ω = f(I)
 (2.2)
(2.2)
и уравнение механической характеристики ω = f(M)
 .
(2.3)
.
(2.3)
В установившемся режиме работы привода
 ,
,
и уравнения 2, 3 приобретают вид
 (2.4)
(2.4)
 (2.5)
(2.5)
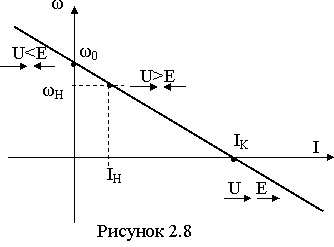
Характеристики, построенные при номинальных значениях напряжения и потока и Rдоб =0, называются естественными, при UЯ ≠ UН, Ф ≠ ФН или Rдоб ≠ 0 – искусственными электромеханическими или механическими характеристиками. Характерными точками электромеханической характеристики (рисунок 2) являются точки идеального холостого хода (I = 0, ω = ω0 = UН/kФН), короткого замыкания (I = IК = UН/RЯΣ, ω = 0) и номинального режима (IЯ = IН, ω = ωН). По любой паре из этих координат можно построить характеристику.
Используя введенные значения жесткости характеристик
 ;
;  (2.6)
(2.6)
можно записать следующие выражения для электромеханических и механических характеристик:
 ;
;  ;
;  (2.7)
(2.7)
Режимы работы привода, приведенные на рисунке 2, поясняются ниже.
В двигательном режиме работы (рисунок 3) ЭД потребляет энергию из электрической сети и передает на вал механическую энергию. В режимепротивовключения (рисунок 4) ЭД потребляет энергию, накопленную механизмом, и рассеивает в элементах двигателя и добавочных сопротивлениях. В режиме рекуперативного (генераторного) торможения (рисунок 5) ЭД потребляет энергию, накопленную механизмом, и передает ее в электрическую сеть.
Лекция 3Искусственные электромеханические и механические характеристики дпт нв. Режимы торможения дпт нв
Цель: изучить влияние на механические характеристики и режимы работы ЭП различных параметров
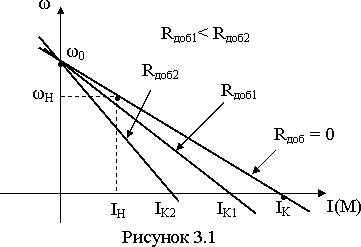
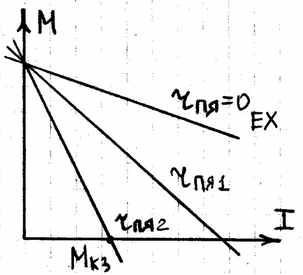
ПриRдоб ≠0 получаем искусственные реостатные электромеханичеcкие характеристики. Увеличение в (2.4, 2.5) RЯΣ приводит к уменьшению величины тока короткого замыкания (IК = UН/RЯΣ) при неизменной скорости холостого хода ω0 = UН/kФН (рисунок 3.1). При неизменном магнитном потоке Ф = ФН, механические характеристики будут аналогичны эл.механическим.
Магнитный поток машины можно изменять только в сторону уменьшения. При этом скорость холостого хода ω0 = UН/kФН возрастает при неизменном значении тока короткого замыкания IК = UН/RЯΣ (рисунок 3.2 – электромеханическая характеристика при Ф — var). Момент короткого замыкания МК =kФIК при Ф — var снижается. Механическая характеристика изображена на рисунке 3.3.

Напряжение, подаваемое на якорьмашины, можно изменять только в сторону уменьшения от номинального значения. При этом пропорционально напряжению снижаются и скорость холостого хода ω0 = UН/kФН , и значение тока короткого замыкания IК = UН/RЯΣ (рисунок 3.4 – электромеханическая характеристика при U — var). Момент машины М = kФI при Ф — const пропорционален току якоря и механическая характеристика имеет аналогичный вид.
|
В соответствии с рассмотренными режимами работы электропривода, следует выделить следующие способы торможения ДПТ НВ:
Расчет характеристик двигателя постоянного тока и асинхронного двигателя ЭМС
ω0 = 110 = 116,28 с-1. 0,946
Пограничная частота вращения:
n0 | = | 30 × ω0 | = | 30 ×116,28 |
| = 1110 об/мин | |
π | π | ||||||
|
|
|
| ||||
Номинальный электромагнитный момент согласно (9):
М Н = 0,946 × 9,0 = 8,514 .
Построим естественную механическую характеристику по двум точкам (график 1 на рис.1):
-точке холостого хода ω = ω0=116,28 с-1 (или n0=1110 об/мин), M=0;
-точке номинального режима ωН=104,74 с-1 (или nН=1000 об/мин),
MН=8,514 Н·м.
2. Рассчитаем требуемую частоту вращения, с которой должен вращаться двигатель при номинальном моменте при добавлении в цепь якоря добавочного сопротивления
nН/ = 0,5 × nН = 0,5 ×1000 = 500 об/мин.
При переходе к угловой скорости имеем:
ωН/ = π × nН/ = π × 500 = 52,36 с-1. 30 30
Сопротивление резистора rДОБ, которое соответствует требуемой искусственной механической характеристике, рассчитывается по формуле:
| n0 | — nH/ |
|
| 1110 — 500 |
|
|
| |
rДОБ | = RЯ |
|
| — 1 | = 1,22 |
| — 1 | = 5,545 | Ом. (18) |
| — nH |
| |||||||
| n0 |
| 1110 — 1000 |
|
|
| |||
Искусственная характеристика при включении в цепь rДОБ=5,545 Ом строится по точкам (график 2 на рис.1):
-точке холостого хода ω = ω0=116,28 с-1 (или n0=1110 об/мин), M=0;
-точке ω/Н=52,36 с-1 (или n/Н=500 об/мин), MН=8,514 Н·м.
Рассчитаем сопротивление r// ДОБ:
r// ДОБ=0,5· r ДОБ=0,5·5,545=2,772 Ом.
15. Естественные электромеханические и механические характеристики двигателей постоянного тока последовательного возбуждения
16. Искусственные электромеханические и механические характеристики двигателей постоянного тока последовательного возбуждения при шунтировании обмотки возбуждения.
17. Искусственные электромеханические и механические характеристики двигателей постоянного тока последовательного возбуждения при шунтировании двигателя.
18. Искусственные электромеханические и механические характеристики двигателей постоянного тока последовательного возбуждения при изменении сопротивления двигателя.
19. Искусственные электромеханические и механические характеристики двигателей постоянного тока последовательного возбуждения при шунтировании якоря.
20. Построение естественных электромеханических и механических характеристик двигателей постоянного тока последовательного возбуждения
Цель: изучение способов построения статических характеристик ДПТ ПВ
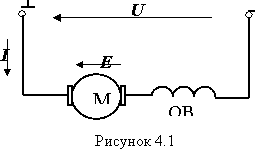
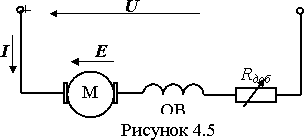
Схема включения двигателя последовательного возбуждения (ДПТ ПВ) приведена на рисунке 4.1. Уравнения механической и электромеханической характеристик соответствуют уравнениям для ДПТ НВ. Главным отличием является то,
что в ДПТ ПВ поток является функцией тока нагрузки, то есть
 ;
;
 ;
; 
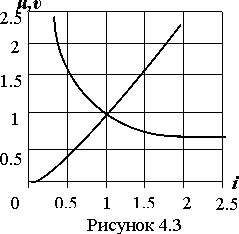
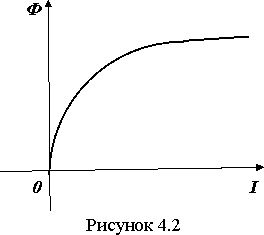
Зависимость Ф=φ(I) – характеристика намагничивания – не имеет простого аналитического описания и ее примерный вид изображен на рисунке 4.2. Построение характеристик ДПТ ПВ производится либо по данным, представленным заводом изготовителем в табличной или графической форме, либо с использованием универсальных характеристик, приведенных в специальной литературе (рисунок 4.3).
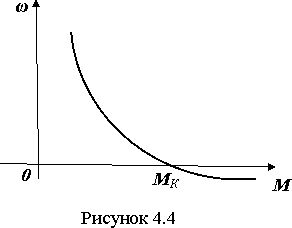

Последние представляют собой зависимости момента и скорости от тока двигателя в относительных единицах. Переход к абсолютным единицам производится через базовые номинальные величины. Построенная таким образом механическая характеристика ДПТ ПВ представлена на рисунке 4.4. Жесткость характеристики непостоянна в диапазоне изменения нагрузки. Такая форма обеспечивает плавный пуск при значительной нагрузке, что определило применение ДПТ ПВ в транспортирующих агрегатах.
Еще одна ее особенность – скорость идеального холостого хода (т.е. при I = 0)
 .
.
Это означает, что такую машину нельзя запускать без нагрузки на валу. В реальных машинах величина ω0 ограничена остаточным магнитным полем, но может превышать номинальную в десятки раз.
Искусственные статические характеристики ДПТ ПВ. Реостатные характеристики двигателя (схема на рисунке 5) можно построить, используя естественную характеристику.
Если скорость двигателя на естественной характеристике при некоторой нагрузке ωе, а на искусственной – ωи, то
 .
.
Если задана величина скорости на реостатной характеристике при определенном значении нагрузки, то соотношение (3) позволяет решить обратную задачу: найти величину добавочного сопротивления, которое нужно включить, чтобы характеристика прошла через заданную точку.
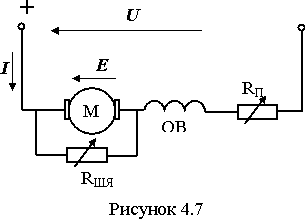
При шунтировании якоря (рисунок 7) при малых нагрузках напряжение на якоре может быть много меньше номинального, и ток возбуждения при малой нагрузке стремится не к нулю, а к величине
Поэтому
в этой схеме скорость двигателя при
идеальном холостом ходе имеет конечное
значение и механическая характеристика
обладает повышенной жесткостью.
Кроме приведенных схем, в приводе с ДПТ ПВ применяются варианты с шунтированием двигателя (совместно ОВМ и якоря – рисунок 4.9) и шунтированием возбуждения (рисунок 4.10), которые необходимо изучить самостоятельно.