
Электромагнитный привод
Jump to Navigation- Информация
- Производители
- Каталог
- Назад
- Насосное оборудование
- Насосы центробежные
- Apex Pumps
- Насосы винтовые
- Насосы высокого давления
- BFT
- GEA
- Погружные насосы
- Houttuin
- Vipom
- Горизонтальные насосы
- Apex Pumps
- GE Oil & Gas Pressure Control
- Houttuin
- Inoxihp
- Vipom
- Насосы герметичные
- Hermetic Pumpen
- Zenith
- Насосное оборудование прочее
- AX System
- Sanco
- Servi Group
- Насосы центробежные
- Фильтровальное оборудование
- Воздушные фильтры
- Jonell
- Масляные и гидравлические фильтры
- Parker Hannifin Corporation
- Servi Group
- Коалесцирующие фильтры
- Buhler Technologies
- EUROFILL
- Hydac
- Jonell
- Petrogas
- Scam Filltres
- Vokes Air
- Водоподготовка
- ASCO Filtri
- Grunbeck
- Фильтры КВОУ
- Осушители
- Воздушные фильтры
- Компрессорное оборудование
- Поршневые компрессоры
- GE Oil & Gas
- Винтовые компрессоры
- GEA
- Howden
- Stewart & Stevenson
- Центробежные компрессоры
- GE Thermodyn
- Stewart & Stevenson
- Поршневые компрессоры
- Трубопроводная арматура
- Запорная, регулирующая, запорно-регулирующая арматура
- Bifold Group
- Siekmann Econosto
- Zimmermann & Jansen (Z&J)
- Предохранительная арматура
- Anderson Greenwood
- Crosby
- Sapag Industrial valves
- Schroedahl
- Servi Group
- Приводы трубопроводной арматуры
- Biffi
- Keystone
- Запорная, регулирующая, запорно-регулирующая арматура
- Гидравлика
- Гидроцилиндры
- Servi Group
- Гидроклапаны
- Meggit
- Servi Group
- Гидронасосы
- Riverhawk
- Servi Group
- Гидрораспределители
- Servi Group
- Пневмоцилиндры
- Artec
- Mec Fluid 2
- Гидроцилиндры
- Станочное оборудование
- Станки шлифовальные
- Robbi
- Хонинговальные станки
- CAR srl
- Kadia
- Станки зубо- и резьбо- обрабатывающие
- Nagel Maschinen
- Карусельные станки
- Star Micronics
- Шпиндели и фрезерные головки
- Cytec
- Станки шлифовальные
- Приводная техника
- Электрические приводы
- Servi Group
- Гидравлические приводы
- Biffi
- Пневматические приводы
- Biffi
- Keystone
- Электромагнитные приводы
- Danfoss
- ECONTROL
- Kendrion
- Редукторы
- Renk
- VAR-SPE
- Турборедукторы
- Flender-Graffenstaden
- Renk
- Электрические приводы
- КИП (измерительное оборудование)
- Анализаторы влажности
- Belimo
- Scantech
- Приборы измерения уровня
- Endress+Hauser
- Приборы контроля и регулирования технологических процессов
- Itron
- S. Himmelstein
- Приборы измерения уровня расхода (расходомеры)
- Belimo
- Itron
- Servi Group
- Системы измерения неразрушающего контроля
- HBM
- Kavlico
- Marposs
- Устройства измерения температуры
- Autrol
- Belimo
- Servi Group
- VDO
- Устройства измерения давления
- Autrol
- Servi Group
- VDO
- Устройства измерения перемещения и положения
- Анализаторы влажности
- Лабораторное оборудование
- Микроскопия и спектроскопия
- Keyence
- Микроскопия и спектроскопия
- Электрооборудование
- Аккумуляторные батареи
- Hoppecke
- Противопожарное оборудование
- Sanco
- Spectrex
- Выключатели
- Metrol
- Источники питания
- LAM Technologies
- Кабели и коннекторы
- Axon’ Cable
- HiRel Connectors
- Murrplastik
- Лазеры
- RIO
- Лампы
- Nic
- Parat
- Серийные преобразователи
- LAM Technologies
- Электродвигатели
- Gamak Motors
- LAM Technologies
- Электроника
- DUCATI Energia
- JOVYATLAS
- Luvata
- Murrplastik
- Аккумуляторные батареи
- Прочее оборудование
- Абразивные изделия
- Abrasivos Manhattan
- Atto Abrasives
- Буровое оборудование
- BVM Corporation
- Den-Con Tool
- MI Swaco
- Top-co
- WestCo
- Валы
- GKN
- Jaure
- Rotar
- Вентиляторы
- Reitz
- Вибротехника
- JOST
- Газовые турбины
- Alba Power
- GE Energy
- Meggit
- Score Energy
- Siemens energy
- Solar turbines
- Горелки
- John Zink
- Зажимные устройства
- Restech Norway
- SPIETH
- Защита от износа, налипания, коррозии
- Rema Tip Top
- Инструмент
- Deprag
- Knipex
- Клапаны
- John Crane
- Mec Fluid 2
- Top-co
- Velan
- Versa
- W.T.A.
- Xomox
- Zimmermann & Jansen (Z&J)
- Крановое оборудование
- Facco
- Маркировочное оборудование
- Couth
- Espera
- Мельницы
- Eirich
- Металлообработка
- Agrati
- Муфты
- Coremo Ocmea
- Esco Couplings
- Jaure
- John Crane
- Kendrion Linnig
- Top-co
- ZERO-MAX
- Оси
- Jaure
- Подшипники
- John Crane
- NTN-SNR
- SPIETH
- Производственные линии
- Espera
- FIBRO
- Masa Henke
- Робототехника
- Motoman Robotics
- Системы обогрева
- Helios
- TYCO Thermal Controls
- Системы охлаждения
- Gohl
- Системы смазки
- Lincoln
- Строительные леса
- HAKI
- Сушильные печи
- Eirich
- Такелажное оборудование
- Casar
- Easy Mover
- Fetra
- Тормоза и сцепления
- Упаковочное оборудование
- Espera
- Thimonnier
- Уплотнения
- Flexitallic
- John Crane
- Форсунки и эжекторы
- Exair
- Центраторы
- Top-co
- Электрографитовые щетки
- Morgan Advanced Materials
- Абразивные изделия
- AX System
- A.O. Smith – Century Electric
- A.S.T.
- Abrasivos Manhattan
- Advanced Energy
- Agilent Technologies
- Alba Power
- Algi
- Allweiler
- Alphatron Marine
- Amot
- Anderson Greenwood
- Apex Pumps
- Apollo Valves
- Ariana Industrie
- Ariel
- Artec
- ASCO Filtri
- Ashcroft
- ATAS elektromotory
- Atos
- Atto Abrasives
- Autrol
- Autronica
- Axis
- Axon’ Cable
- Bando
- Baruffaldi
- BAUER Kompressoren
- Belimo
- Berarma
- BFT
- BHDT
- Biffi
- Bifold Group
- Brinkmann pumps
- Buhler Technologies
- BVM Corporation
- Camfil FARR
- Campen Machinery
- CanaWest Technologies
- CAR srl
- Carif
- Casar
- CAT
- Celduc Relais
- Center Line
- Clif Mock
- Comagrav
- Compressor Controls Corporation
- CoorsTek
- Coral engineering
- Coremo Ocmea
- Couth
- CRANE
- Crosby
- Cubiscan
- Cytec
- Danaher Motion
- Danfoss
- Danobat Group
- David Brown Hydraulics
- Den-Con Tool
- DenimoTECH
- Deprag
- Destaco
- Dixon Valve
- Donaldson
- Donaldson осушители, адсорбенты
- DUCATI Energia
- Duplomatic
- Duplomatic Oleodinamica
- Dustcontrol
- Dynasonics
- E-tech Machinery
- Easy Mover
- Ebro Armaturen
- ECONTROL
- Eirich
- EMIT
- Endress+Hauser
- Esco Couplings
- Espera
- Estarta
- Euchner
- EUROFILL
- EuroSMC
- Exair
- Facco
- FANUC
- Farris
- Fema
- Ferjovi
- Fetra
- FIBRO
- Fisher
- Flender-Graffenstaden
- Flexitallic
- Flowserve
- Fluenta
- Flux
- FPZ
- Freudenberg
- Fritz STUDER
- Gali
- Gamak Motors
- GE Bently Nevada
- GE Energy
- GE Lufkin Industries
- GE Nuovo Pignone
- GE Oil & Gas
- GE Oil & Gas Pressure Control
- GE Panametrics
- GE Rotoflow
- GE Thermodyn
- GEA
- General Electric
- General Electric Waukesha
- GEORGIN
- GKN
- Gohl
- Goulds Pumps
- GPM Titan International
- Graco
- Grunbeck
- Grundfos
- Gustav Gockel
- HAKI
- Harting technology
- HAWE Hydraulik SE
- HBM
- Heimbach
- Helios
- Hermetic Pumpen
- Herose
- HiRel Connectors
- Hohner
- Holland-Controls
- Honsberg Instruments
- Hoppecke
- Horton
- Houttuin
- Howden
- Howden CKD Compressors s.r.o.
- HTI-Gesab
- Hydac
- Hydrotechnik
- IMO
- Inoxihp
- iNPIPE Products
- ISOG
- Italmagneti
- Itron
- ITW Dynatec
- Jaure
- JDSU
- Jenoptik
- John Crane
- John Zink
- Jonell
- JOST
- JOVYATLAS
- K-TEK
- Kadia
- Kavlico
- Kellenberger
- Kendrion
- Kendrion Linnig
- Keyence
- Keystone
- Kitagawa
- Knipex
- Knoll
- Kordt
- Krombach Armaturen
- KSB
- Kumera
- Labor Security System
- LAM Technologies
- Lapmaster Wolters
- Lincoln
- Luvata
- M.G.M. motori elettrici S.p.A.
- Mahle
- Marposs
- Masa Henke
- Masoneilan
- Mec Fluid 2
- MEDIT Inc.
- Meggit
- Mercotac
- Metrix
- Metrol
- MI Swaco
- Minco
- MMC International Corporation
- MOOG
- Moore Industries
- Morgan Advanced Materials
- Motoman Robotics
- Moyno
- Mud King
- MULTISERW-Morek
- Munters
- Murr elektronik
- Murrplastik
- Nagel Maschinen
- National Oilwell Varco
- Netzsch
- Nexoil srl
- Nic
- NOV Mono
- NTN-SNR
- Ntron
- O’Drill/MCM
- Oerlikon
- Oilgear
- Omal Automation
- Omni Flow Computers
- OMT
- Opcon
- Orange Research
- Orwat filtertechnik
- OTECO
- Pacific valves
- Pageris AG
- Paktech
- PALL
- Parat
- Parker Hannifin Corporation
- PENTAIR
- Peter Wolters
- Petrogas
- ProMinent
- Quick Soldering
- Reitz
- Rema Tip Top
- Renk
- Renold
- Repar2
- Resatron
- Resistoflex
- Restech Norway
- Revo
- Rexnord
- Rheonik
- Rineer Hydraulics
- RIO
- Riverhawk
- RMG Honeywell
- Robbi
- ROS
- Rota Engineering
- Rotar
- Rotork
- Ruhrpumpen
- S. Himmelstein
- Sanco
- Sapag Industrial valves
- Saunders
- Scam Filltres
- Scantech
- Schroedahl
- Score Energy
- Sermas Industrie
- Servi Group
- Settima
- Siekmann Econosto
- Siemens
- Siemens energy
- Simaco
- Solar turbines
- Solberg
- SOR
- Spectrex
- SPIETH
- SPX
- Stamford | AvK
- Star Micronics
- Stewart & Stevenson
- Stockham
- Sumitomo
- Supertec Machinery
- Tamagawa Seiki
- Tartarini
- TEAT
- Thimonnier
- Top-co
- Truflo
- Turbotecnica
- Tuthill
- TYCO Thermal Controls
- Vanessa
- VAR-SPE
- VDO
- Velan
- Versa
- Vibra Schultheis
- Vipom
- Vokes Air
- Voumard
- W.T.A.
- Warren
- Weatherford
- Weiss GmbH
- Wenglor
- WestCo
- Woodward
- Xomox
- Yarway
- Zenith
- ZERO-MAX
- Zimmermann & Jansen (Z&J)
Линейный привод / Юнимаш
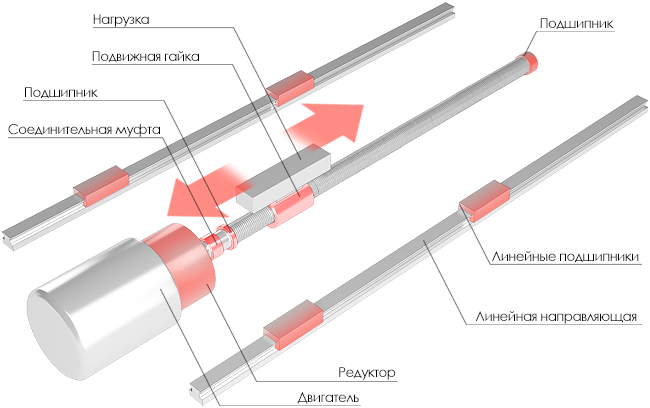
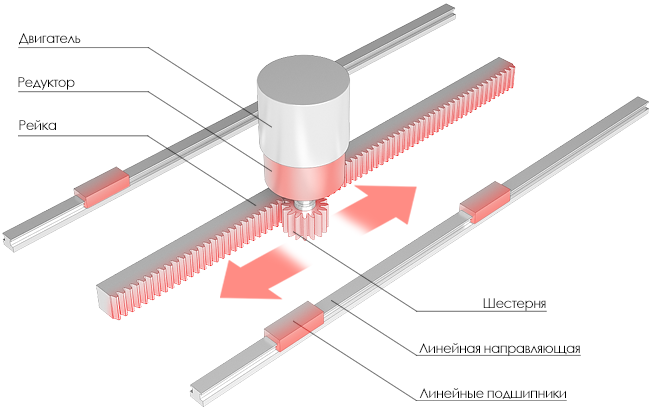
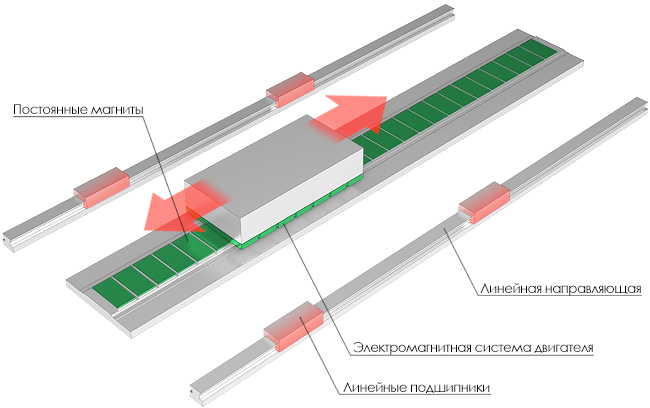
Ниже приведены схемы реализации линейного перемещения трех видов наиболее распространенных кинематических схем портального механизма, которые используются в современном станкостроении: шарико-винтовой пары (ШВП), реечной передачи (шестерня-рейка) и линейного двигателя (прямого привода).
- Элементы, подверженные механическому износу
- Элементы, подверженные механическому износу
- Элементы, подверженные механическому износу
- Элементы, не подверженные механическому износу
Конструкция ШВП предполагает большое количество механических сопряжений, что приводит к износу частей шарико-винтовой пары и как следствие потери точности обработки. В свою очередь, линейный двигатель состоит всего из двух частей, взаимодействие которых происходит исключительно на электромагнитном уровне. Механического контакта между частями нет, следовательно, нет механического износа самого линейного привода.
Однако кроме привода в координатной системе используются линейные направляющие и линейные подшипники, которые также являются механическими компонентами и подвержены износу. Они используются равно как в системах на линейном приводе, так и в системах на ШВП или зубчатой рейке. Таким образом, утверждение, что системам на линейном приводе не свойственен механический износ – маркетинговая уловка и лишь отчасти является правдой.
Следует отметить что, присутствует дополнительная сложность реализации систем ШВП для длинных ходов, что обусловлено дополнительными механическими напряжениями вследствие прогиба винта. Для таких систем требуется точный инженерный расчёт и использование высококачественных комплектующих. Поэтому производители, не обладающие достаточным инженерно-научным потенциалом, делают координатные системы ШВП с низкой надёжностью, либо избегают её использования.
Реечная передача лишена таких недостатков ШВП, как прогиб и высокая инерционная нагрузка на двигатель, но требует ещё более высококачественного исполнения координатной системы: высокоточной установки направляющих, зубчатой рейки, редуктора и двигателя. При должном качестве изготовления станины и сборке, современная зубчатая передача на основе закалённой шестерни-рейки обеспечит длительную и стабильную работу станка.
Однако погрешности в изготовлении станины или установке направляющих могут привести к появлению люфтов и быстрого механического износа привода. Поэтому, как и в случае с ШВП, производители, не обладающие опытом и технологиями высокоточного изготовления координатных систем, либо не могут обеспечить должной надёжности станка, либо избегают использования реечной передачи.
В силу меньшего количества этапов преобразования электрической энергии в поступательное движение, линейный привод обладает лучшим КПД, нежели привод на ШВП или зубчатой рейке. Кроме этого, благодаря отсутствию механических сочленений линейный привод лишён механических люфтов.
Однако, поскольку привод является неединственной частью координатной системы, само по себе использование линейного привода не означает отсутствие люфтов в системе целиком. Координатная система опирается на линейные подшипники, которые движутся по линейным направляющим. И эти механические компоненты имеют собственные люфты.
Кроме этого, обратная связь (магнитная или оптическая линейка) линейного привода, имеют так называемый гистерезис, т.е. определенную зону нечувствительности при смене направления движения. Эффект на точность позиционирования координатной системы у этого явления точно такой же, как и у механического люфта.
Поэтому декларирование отсутствия люфтов в координатной системе на линейном приводе – это маркетинговая полуправда.
Координатные системы на ШВП и зубчатая передача подвержены несколько большему износу, чем линейный привод, в силу взаимодействия большего числа механических компонентов. Тем не менее, поскольку координатная система ни в том, ни в другом случае не лишена механических компонентов полностью, линейные привод не гарантирует отсутствия износа.
Механические люфты системы напрямую влияют на повторяемость позиционирования координатной системы. В силу большего количества механических сочленений координатные системы на ШВП и зубчатой рейке имеют несколько большую величину механического люфта. Однако, координатная система на линейном приводе также не лишена люфтов, появляющимися в линейных подшипниках.
Точность на длинных ходах в случае координатной системы на линейном приводе определяется точностью системы обратной связи по положению (магнитной или оптической линейкой), а также точностью установки портала (прямого угла) и самой системы слежения. В случае координатных систем на основе ШВП или зубчатой рейки, точность определяется качеством изготовления станины и установки направляющих. В обоих случаях, чтобы компенсировать отклонения на больших ходах, требуется калибровка координатной системы при помощи лазерного интерферометра. После такой калибровки, точность системы на длинных ходах остаётся приблизительно одинаковой, независимо от типа используемого привода. При отсутствии надлежащего качества производства и инженерно-технических возможностей для калибровки координатной системы, использованием прямого (линейного) привода является более предпочтительным в силу своей простоты. Однако само по себе использование линейного привода не гарантирует потери точности перемещений на длинных ходах.
Координатные системы на базе ШВП имеют не очень высокие динамические характеристики, в силу технологических особенностей (высокая масса ШВП и, как следствие, высокая инерционность нагрузки). Тем не менее, динамические характеристики могут быть подняты за счёт наращивания мощности двигателей.
Координатные системы на базе зубчатой рейки имеют высокие динамические характеристики, ограниченные инерционностью нагрузки и ротора двигателя.
Координатные системы на линейном приводе имеют высокие динамические характеристики, ограниченные инерционность нагрузки и двигателя.
Конкретные динамические характеристики координатной системы зависят от используемого типа привода и веса нагрузки (портала). Слабый линейный привод не обеспечит надлежащей динамики, и даже не сравнится с системой на зубчатой рейке и сервоприводе. В тоже время двигатель высокой мощности, установленный с ШВП, может обеспечить вполне достаточные динамические характеристики координатной системы.
В силу меньшего количества механических компонентов и сочленений система на линейном приводе обеспечивает несколько более высокий уровень надёжности. Однако, всегда следует помнить, что привод является не единственным компонентом станка лазерной резки, и следует оценивать общую надёжность системы в целом.
Точность контурных перемещений
Точность контурных перемещений мало зависит от типа привода и определяется в первую очередь механической жёсткостью конструкций координатной системы (в т.ч. портала), а также частотным ответом координатной системы (который, в свою очередь, зависит от конструктивных особенностей портала, крепления головки и других компонентов).
Точность контурных перемещений также связана с динамическими характеристиками координатной системы. Установив мощный привод можно добиться высокой динамики на холостых ходах (с отключенным инструментом), но для обеспечения точности, если конструкция станка недостаточно жёсткая, требуется значительное понижение значений ускорений и торможений.
При равных технических параметрах координатная система на линейном приводе дороже, чем координатная система на ШВП или зубчатой рейке. Это объясняется тем, что для прямого привода требуется длинная «магнитная дорога», вдоль которой и движется привод, собранная из мощных неодимовых магнитов. В то время как у обычного серводвигателя количество таких магнитов значительно меньше и они находятся на роторе, который поворачивается множество раз в пределах рабочего хода координаты.
Таблицу можно прокручивать влево/вправо
| Координатная система на ШВП | Координатная система на зубчатой рейке | Линейный двигатель |
|---|---|---|
| Подвержена износу. Высокий износ при некачественном изготовлении. | Подвержена износу. Высокий износ при некачественном изготовлении. | Подвержена износу. Износ несколько меньше, чем у координатных систем других типов. |
| Наличие люфтов в тележках и приводе, влияющих на точность. | Наличие люфтов в тележках и приводе, влияющих на точность. | Наличие люфтов в тележках, влияющих на точность. Наличие гистерезиса в обратной связи, влияющего на точность. Повторяемость позиционирования несколько выше, чем у КС других типов. |
| Снижение точности на длинных ходах. | Снижение точности на длинных ходах. | Высокая точность на любых ходах. |
| Средняя динамика. | Высокая динамика перемещения (при использовании мощного привода). | Высокая динамика перемещения (при использовании мощного привода). |
| Высокая надёжность при должном качестве изготовления. | Высокая надёжность при должном качестве изготовления. | Высокая надёжность. |
| Средняя стоимость. | Средняя стоимость. | Высокая стоимость. |
Линейный привод обладает рядом неоспоримых преимуществ, однако не является «панацеей от всех бед». Сам по себе линейный привод лишь незначительно увеличивает срок службы оборудования, повышает точность координатной системы и динамику перемещений. Достоинства линейного привода раскрываются только при условии его высокой мощности, продуманной конструкции координатной системы (с высокой жёсткостью и частотным ответом) и высокого качества изготовления станка, иными словами, при комплексном подходе к оборудованию.
При высоком качестве изготовления машины на базе традиционных приводов (ШВП и зубчатой рейке) лишь немногим будут уступать в надёжности станкам на прямом приводе (при условии, что все остальные комплектующие на станках сравниваемых типов обладают одинаковой надёжностью). Тем не менее, при недостаточных технологических и инженерных возможностях линейный привод – наиболее простой и эффективный выход для обеспечения приемлемого уровня надёжности координатной системы, что обуславливает его возрастающую популярность.
Продвижение координатных систем на базе линейного привода, как «вечных» — не более чем маркетинговая уловка для завлечения не особо сведущего в технических подробностях покупателя. Компания Unimach производит станки на всех трёх типах приводов: ШВП, зубчатой рейке и линейном (прямом) приводе, что позволяет всегда предложить наиболее эффективное решение с точки зрения цены, производительности и надёжности для каждой задачи.
Линейный привод — Википедия
Материал из Википедии — свободной энциклопедии

Лине́йный при́вод — совокупность устройств, предназначенных для приведения в действие исполнительного органа машин по линейному поступательному движению. Состоит из двигателя, трансмиссии и системы управления.
Различают следующие линейные приводы в зависимости от вида используемой первичной преобразуемой энергии в механическую энергию линейного поступательного движения исполнительного органа: — линейный электропривод, — линейный гидропривод, — линейный пневмопривод, — и др.
Для преобразования вида движения в приводах на базе двигателей вращения используются различные механические передачи с известными недостатками.
Одним из вариантов создания безредукторного ЭП является применение линейных асинхронных электродвигателей (ЛАД), обеспечивающих получение непосредственно прямолинейного движения. Такие приводы повсеместно применяются для перемещения блока магнитных головок в современных жёстких дисководах. Однако широкое использование ЛАД для силового перемещения затруднено, в том числе и тем, что интеграция производственного механизма с исполнительным двигателем приводит к необходимости проектирования каждый раз привода и механизма, работающего в технологической среде одновременно.
Используются также другие физические принципы для обеспечения линейного перемещения, например, пьезоэлектрические приводы, магнитострикционные, используемые в микроманипуляторах, и другие типы.
Линейные двигатели нового поколения — Sodick
Потребовались многие годы работы ученых и конструкторов в разных странах, прежде чем был достигнут успех. Особенно интенсивно велись работы в Японии, где электромагнитный привод (уже как линейный привод) был впервые успешно использован как движитель для сверхскоростных поездов. Там же были попытки создания линейных приводов для металлообрабатывающих станков, но они имели существенные недостатки: создавали сильные магнитные поля, грелись, а главное не обеспечивали равномерности в движении РО. Лишь на пороге нового тысячелетия начался серийный выпуск станков (пока в основном электроискровых (электроэрозионных)) с принципиально новыми линейными двигателями, в которых решены все проблемы по обеспечению равномерным движением РО станков со сверхвысокой точностью, с большим диапазоном регулирования скорости, с громадными ускорениями, мгновенным реверсом, с простотой обслуживания и наладки и др. Японская компания Sodick Co., Ltd. первой сумела решить сложнейшие конструкторско-технологические задачи и вывела линейные двигатели на новый, совершенный уровень.
В принципе, конструкция ЛД изменилась не сильно. Собственно двигатель состоит всего из 2 (!) элементов: электромагнитного статора и плоского ротора, между которыми лишь воздушный зазор. Третий обязательный элемент – оптическая или другая измерительная линейка с высокой дискретностью (0,1 мкм). Без нее система управления станка не может определить текущие координаты. И статор, и ротор выполнены в виде плоских, легко снимаемых блоков: статор крепится к станине или колонне станка, ротор — к рабочему органу (РО). Ротор элементарно прост: он состоит из ряда прямоугольных сильных (редкоземельных) постоянных магнитов. Закреплены магниты на тонкой плите из специальной высокопрочной керамики, коэффициент температурного расширения которой в два раза меньше чем у гранита. Использование керамики совместно с эффективной системой охлаждения решило многие проблемы линейных приводов, связанные с температурными факторами, с наличием сильных магнитных полей, с жесткостью конструкции и т.п.
Точная и равномерная подача РО во всем диапазоне скоростей и нагрузок обеспечивается двумя техническими «изюминками», разработанными и запатентованными «Содик»:
крепление постоянных магнитов под определенным фиксированным углом, который был открыт в ходе длительных экспериментов;
реализация высокоэффективной 6-ти фазной импульсной системы управления (система SMC).
Компания «Содик» организовала на своих заводах серийный выпуск широкой гаммы ЛД с выдающимися характеристиками: с ходом подач от 100 до 2220 мм, с максимальной скоростью перемещения РО до 180 м/мин с ускорениями до 20G (!!!) при точности исполнения заданных перемещений (в нормальном режиме работ) равной 0,0001мм (0,1 мкм). Нагрев ЛД «Содик» при работе не превышает + 2° С от температуры помещения. Обеспечивается практически мгновенная остановка РО, реверс, моментальная реакция привода на команды системы ЧПУ и т.д. На один и тот же рабочий орган монтируется (например, для увеличения мощности) несколько линейных двигателей. Так, в частности, устроен привод оси Z всех ЭЭ прошивочных станков «Содик».
Как указывалось, и статор, и ротор ЛД предельно просты. Статор исполнен в виде прямоугольного блока и крепится несколькими болтами к несущей конструкции станка. В приводе оси Z — два статора. Они размещены по обе стороны вертикального ползуна. К каждому статору крепятся два патрубка системы охлаждения статора и кабели подвода энергии и управления. Пластина ротора жестко крепится болтами к подвижной каретке (РО ). Так как в приводе оси Z два ЛД, то на каретке крепятся, соответственно, два ротора , каждый напротив своего статора. Система специальных направляющих и пневмопротивовес обеспечивают исключительную легкость хода каретки, практически без усилий. Приводы по осям X, Y прошивочных станков и в приводах X, Y, U, V проволочно-вырезных станков проще — в них всего по одному ЛД.
Актуаторы. Виды и устройство. Работа и применение. Особенности
Актуаторы представляют собой специальные устройства, главной задачей которых является перенос усилия с управляющего или регулирующего механизма на исполнительный. В большинстве случаев это электромеханический агрегат, который позволяет выполнять круговые либо линейные перемещения. Благодаря этому можно значительно облегчить выполнение технологических операций, тестирование, в том числе упростить условия быта. Эти устройства применяются и для совершения специфических задач, к примеру, для осуществления миссий и проведения исследований в космическом пространстве.
Виды
Актуаторы бывают линейными и устройствами вращения.
Линейные
Семейство устройств, которые обеспечивают преобразование механической энергии в линейное перемещение. В большинстве случаев такие устройства применяются с целью получения механической энергии из электрической. Выполняются такие устройства из подвижного штока, который устанавливается в корпус из металла или пластмассы. Чтобы к агрегату поступала электроэнергия, предусматриваются разъемы, вилки или кабели. В зависимости от конструкции привод может потреблять 12, 24, 36 либо 220 В.
Линейные агрегаты имеют два основных исполнения:
- Горизонтальное.
- Вертикальное.
То есть конструкция агрегата такова, что шток перемещается в вертикальном либо горизонтальном направлении по отношению к валу мотора.
К преимуществам линейных агрегатов можно отнести:
- Простоту конструкции.
- Длительный срок эксплуатации.
- Неприхотливость в работе, что позволяет использовать их даже в экстремальных условиях.
Конкретные агрегаты в зависимости от модели могут дополнительно иметь защиту, которая обеспечивает стойкость к неблагоприятным условиям.
Актуаторы вращения
Работают несколько иначе. У них имеется редуктор и электродвигатель. Особенность работы такого агрегата в том, что чем ниже передаточное число шестеренок редуктора, тем выше скорость и меньше крутящий момент.
В агрегатах вращения могут применяться различные типы редукторов:
- Цилиндрический.
- Планетарный.
- Червячный.
- Комбинированный.
Благодаря разнообразию редукторов вращающие агрегаты способны решать разнообразные задачи. Поэтому они находят широкое применение в электроэнергетике, станках, бытовых устройствах, в промышленности и других отраслях.
Существуют и специальные виды актуаторов. Подобные агрегаты предназначены для решения специфических и наиболее сложных задач. Их часто применяют в космическом, а также водном пространстве. Также они находят применение в условиях вечной мерзлоты. По конструктивным составляющим они не сильно отличаются от аналогичных агрегатов. Однако их главное отличие – качество исполнения герметичности корпуса. Благодаря пылеустойчивости и водонепроницаемости удается обеспечить бесперебойность работы агрегата даже в сложнейших условиях.
Устройство
Имеется большое количество разных методов для создания линейного перемещения в линейном актуаторе. В большей части случаев используется движок, который передает движение штоку. Шток выдвигается или втягивается, перемещаясь по направляющей. Линейные актуаторы для обеспечения линейного перемещения в большинстве случаев применяют винт, то есть так называемую винтовую передачу. Благодаря вращению винта относительно гайки или наоборот обеспечивается линейное движение штока.
Движки, применяемые в линейных агрегатах, чаще всего представляют собой стандартные коллекторные устройства, работающие на постоянном токе в 12 или 24 В. Более мощным агрегатам требуется электроток на порядок большего значения. Однако возможно применение и других типов движков.
Для изменения направления движения штока следует поменять направление вращения движка. Для примера, в коллекторном движке следует сменить полярность электропитания. С этой целью в конструкцию добавляется переключатель, благодаря нему происходит смена полярности электропитания. В результате простым нажатием кнопки можно изменить вращение движка, а значит попеременно выдвигать или втягивать шток.
Работа
Имеющиеся сегодня линейные актуаторы могут иметь разный ход штока. Это значит, что агрегаты создаются с разными длинами корпуса и винта. Кроме длины хода важнейшее значение имеют скорость и усилие, которые создаются на штоке агрегата. Чтобы обеспечить требуемую скорость и усилие штока, требуется модернизация устройства. Для этого между валом движка и винтом ставится редуктор механического действия.
Движок передает на вал скорость и усилие, которые являются неизменными. Движок же меняет отношение скорости и момента кручения, благодаря чему меняется конечная скорость перемещения штока, а также создаваемое усилие. Движение винта также представляет передачу, которая влияет на скоростное и силовое отношение. Меньший шаг винтовой передачи обеспечивает большее усилие. Однако шток при этом будет перемещаться с меньшей скоростью.
Чтобы можно было остановить шток в необходимом положении, в агрегат ставятся концевики. Их также называют выключателями. Концевики ставятся непосредственно на шток. Они начинают работать в момент, когда гайка достигает крайнего положения. С этой целью ставятся датчики в конечные положения. Когда шток доходит до этого положения, то датчик выключает электропитание. Далее шток сможет двигаться только в обратном направлении. Для этого меняется полярность электропитания либо осуществляется реверс движка.
Как пример можно рассмотреть актуатор центрального замка автомобиля. В его работе используется небольшой электродвижок, соединенный с подвижным штоком. К нему приделана тяга от замка. В момент подачи напряжения начинает работать движок, который заставляет вал вращаться в требуемом направлении, что приводит к движению штока. Вместе со штоком в движение приводится и тяга, у которой один конец находится на рычаге замка. В результате осуществляется блокирование или освобождение замка.
Так как штоку требуется короткий ход, то движок быстро заклинивается. Вследствие этого необходимо ограничивать время подачи напряжения. Для этого используется блок управления, который точно дозирует временной интервал подачи электропитания. Благодаря этому движок защищен от заклинивания и перегорания.
Применение
Актуаторы находят широкое применение практически повсеместно. Их можно задействовать в разнообразных устройствах, к примеру, для регулировки положения телевизионного приемника, для перемещения пандуса, в станках, компрессорах, игрушках, самолетах, подводных лодках, пароходах и космических кораблях и т.п.
В медицине данные агрегаты задействованы для медицинской мебели, чтобы регулировать положения спинки кресла, кровати и другой мебели. Их ставят на подъемники, чтобы перемещать инвалидов и больных с одного этажа на другой. При этом такие устройства преимущественно имеют минимальную шумность, а также высокие значения по качеству и надежности.
В промышленности актуаторы применяются для автоматизации технологических процессов и оборудования. В большинстве случаев это компактные агрегаты, обладающие высокими показателями мощности. Их используют на заводах и фабриках для линейного перемещения. Большое значение здесь имеют технические показатели, в первую очередь это касается нагрузок, скорости, плавности перемещения, в том числе возможности функционировать в неблагоприятных условиях.
Использование промышленных агрегатов позволяет существенно облегчить людской труд, а также снизить финансовые затраты. Благодаря ним, в конце концов, снижается стоимость производимой продукции.
Можно выделить следующие области промышленного применения:
- Электромеханические агрегаты находят применение в станкостроении, машиностроении и пищевой промышленности.
- В сверхтехнологичном производстве они используются в качестве устройств, которые перемещают солнечные батареи по отношению к солнечным лучам. Также подобные агрегаты задействуют для перемещения параболических антенн вслед за спутником.
- В промышленной вентиляции агрегаты обеспечивают перемещение выдвижных панелей вытяжки, чтобы автоматизировать регуляцию воздушных потоков.
В сельском хозяйстве приводы линейного перемещения позволяют максимально автоматизировать труд при возделывании агрокультур, заготовлении кормов, при уходе за фермерскими животными и так далее.
К примеру, это могут быть разбрызгивающие устройства для обработки почв, растений от вредителей, устройства для внесения удобрения. На больших фермерских хозяйствах линейные агрегаты позволяют регулировать воздушные потоки и автоматизировать подачу кормов для животных при кормежке. В растениеводстве линейные приводы помогают открывать теплицы, чтобы огурцы или помидоры не «сгорели» от жары.
Для быта данные актуаторы просто незаменимы. Их можно встретить во многих бытовых приборах. К примеру, это могут быть шторы, жалюзи с приводом и так далее. Все автомобили просто напичканы данными устройствами. Они используются в замках багажника, дверей, магнитол с выдвижным дисплеем и тому подобное. Это полезные устройства, которые позволяют решать многочисленные задачи.
Похожие темы:
Электромагнитный линейный двигатель
Использование: в электромагнитных исполнительных устройствах в качестве линейного электропривода. Устройство содержит электромагнит в виде корпуса, цилиндрического магнитопровода, обмотки возбуждения, якоря, а также ведомое звено, пружины сжатия, направляющие с упорами и стопорные элементы. Якорь выполнен в виде двух ферромагнитных полых полуцилиндров, размещенных концентрично с зазором в осевом отверстии магнитопровода с одной из его сторон, обращенных друг к другу поверхностями, полученными при осевом разрезе полого цилиндра вдоль образующей, и прикрепленных к магнитопроводу в средней его части внутренними торцами с помощью пружин сжатия. Ведомое звено выполнено в виде немагнитной пластины, свободно размещенной в осевом отверстии магнитопровода между указанными поверхностями образующих якорь полуцилиндров и имеющей на боковых гранях стопорные элементы, контактирующие с упорами направляющих. Технический результат — упрощение конструкции и снижение потребления энергии. 3 ил.
Изобретение относится к электромагнитным исполнительным устройствам и может быть использовано в качестве линейного электропривода.
Известен линейный электродвигатель, содержащий источник магнитного поля с полюсами, подвижный гофрированный упругий элемент с жестко закрепленной на нем обмоткой, размещенной между полюсами источника, а также ведомое звено, выполненное в виде стержня, установленного с натягом между гофрами упругого элемента /см. а.с. СССР N 1365275, кл. H 02 K 33/10, 41/03, 1988 г./. Недостатками известного устройства являются сложность конструкции и сравнительно низкое тяговое усилие. Известен также электромагнитный линейный двигатель, содержащий два электромагнита с катушками, якорями и магнитопроводами с фиксаторами, взаимодействующими с зубчатой рейкой, причем, один электромагнит расположен внутри другого, а якорь каждого электромагнита жестко связан с магнитопроводом другого /см. а.с. СССР N 957366, кл. H 02 K 41/03, 1982 г./. Недостатками данного двигателя являются сложность конструкции, значительные вес и габариты, а также значительное потребление электроэнергии вследствие необходимости перемещения в процессе работы всего электродвигателя вместе с корпусом. Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является электромагнитный линейный двигатель, содержащий электромагнит в виде корпуса со стопорными элементами, входящими в зацепление с упорами направляющей, цилиндрического магнитопровода, обмотки возбуждения и якоря, соединенного с помощью стержней и пружины сжатия с ограничителем перемещения и фланцем /см. а.с. СССР N 1483563, кл. H 02 K 41/03, 1987 г./, принятый за прототип. Недостатками устройства — прототипа являются сложность конструкции вследствие необходимости перемещения якоря за два такта с поочередной фиксацией фланца и корпуса, а также значительное потребление электроэнергии вследствие необходимости перемещения в процессе работы большой массы, а именно всего двигателя вместе с корпусом. Сущность изобретения заключается в создании электромагнитного линейного двигателя, в котором однонаправленное интенсивное движение ведомого звена создается за счет обеспечения жесткого контакта с помощью магнитных сил ведомого звена с якорем в рабочие полупериоды движения якоря и разрыва этого контакта в нерабочие полупериоды. Технический результат — упрощение конструкции и снижение потребления электроэнергии. Указанный технический результат при осуществлении изобретения достигается тем, что в известном электромагнитном линейном двигателе, содержащем электромагнит в виде корпуса, цилиндрического магнитопровода, обмотки возбуждения, якоря, а также ведомое звено, пружины сжатия, направляющие с упорами и стопорные элементы, особенность заключается в том, что якорь выполнен в виде двух электромагнитных полых полуцилиндров, размещенных концентрично с зазором в осевом отверстии магнитопровода с одной из его сторон, обращенных друг к другу поверхностями, полученными при осевом разрезе полого цилиндра вдоль образующей, и прикрепленных к магнитопроводу в средней его части внутренними торцами с помощью пружин сжатия, а ведомое звено выполнено в виде немагнитной пластины, свободно размещенной в осевом отверстии магнитопровода между вышеуказанными поверхностями образующих якорь полуцилиндров и имеющей на боковых гранях стопорные элементы, контактирующие с упорами направляющих. Сущность изобретения поясняется чертежами, где на фиг. 1 схематично изображен предлагаемый двигатель, продольный разрез /без направляющих/; на фиг. 2 — вид А на фиг. 1; на фиг. 3 — вид Б на фиг. 1. Электромагнитный линейный двигатель содержит электромагнит в виде корпуса 1, цилиндрического магнитопровода 2 с центральной перемычкой 3, обмотки возбуждения 4, якоря 5, 6, а также ведомое звено 7, пружины сжатия 8, 9, направляющие 10 с упорами 11 и подпружиненные стопорные элементы 12. При этом якорь 5, 6 выполнен в виде двух ферромагнитных полых полуцилиндров 5 и 6, размещенных концентрично с зазором 13 в осевом отверстии 14 магнитопровода 2 с одной из его сторон, обращенных друг к другу поверхностями, полученными при осевом разрезе полого цилиндра вдоль образующей, и прикрепленных к перемычке 3 магнитопровода 2 с помощью пружин сжатия 8, 9, а ведомое звено 7 выполнено в виде немагнитной пластины, свободно размещенной в осевом отверстии 14 магнитопровода 2 между вышеуказанными поверхностями образующих якорь полуцилиндров 5, 6 и имеющей на боковых гранях подпружиненные стопорные элементы 12, контактирующие с упорами 11 направляющих 10. Работа двигателя осуществляется следующим образом. При выключенной обмотке 4 пружины 8, 9 недеформированы, полуцилиндры 5, 6 якоря выступают наружу из отверстия 14 магнитопровода 2, и между полуцилиндрами 5, 6 и пластиной 7 ведомого звена имеется зазор, то есть контакт отсутствует. При включении обмотки 4, то есть подачи в нее импульса тока ферромагнитные полуцилиндры 5, 6 втягиваются внутрь осевого зазора 14 магнитопровода 2 и пружины 8, 9 сжимаются. Одновременно со втягиванием полуцилиндры 5, 6 намагничиваются и притягиваются друг к другу. Этим притяжением они обеспечивают магнитному потоку в зазоре магнитопровода минимальное магнитное сопротивление. При этом полуцилиндры 5, 6 своими поверхностями, полученными при сечении цилиндра, плотно зажимают пластину 7, поэтому при втягивании полуцилиндров 5, 6 внутрь электромагнита пластина 7 смещается вместе с полуцилиндрами вправо. При выключении тока полуцилиндры 5, 6 размагничиваются и под действием пружин 8, 9 выталкиваются из отверстия 14 электромагнита частично наружу, а пластина 7 — из-за того, что полуцилиндры при обратном ходе расходятся друг от друга и соответственно разжимают пластину — остается в смещенном вправо положении. Сжатие полуцилиндров 5, 6 при их намагничивании объясняется максимальной плотностью силовых линий магнитного поля вблизи продольной оси катушки электромагнита. В результате при подаче в катушку 4 последовательности импульсов тока любой полярности пластина 7 /ведомое звено/ получает направленное поступательное движение вправо. При этом за счет взаимодействия упоров 11 на направляющих 10 с подпружиненными стопорными элементами 12 на боковых гранях пластины 7 удается получать поступательное движение с необходимой дискретностью позиционирования, то есть движение в шаговом режиме /данный вопрос подробно описан в известных конструкциях/. На фиг. 1 во избежание загромождения направляющие 10 поступательного движения пластины 7 не показаны. Эти направляющие показаны на виде сверху /вид Б/ на пластину 7 на фиг. 3 снаружи электромагнита. Очевидно, что предложенный двигатель отличается предельной простотой конструкции, а также простотой регулировки и эксплуатации. При подборе соответствующих электромагнитных и конструктивных параметров за счет значительных усилий втягивания якоря 5, 6 и зажатия полуцилиндрами 5 и 6 пластины 7 здесь можно легко добиться значительных тяговых усилий и большого диапазона перемещений. Так как подвижным элементом здесь является не весь двигатель в корпусе, как в известных вышеописанных конструкциях, а только пластина 7, то масса подвижной части мала, что позволяет снизить потребление электроэнергии на движение. Согласно принципу работы в двигателе исключены двойные циклы, когда, например, в первый полупериод движения часть двигателя /один магнитопровод с якорем/ смещается, второй магнитопровод — неподвижно фиксируется, а второй полупериод движения — наоборот. За счет этого удалось повысить надежность двигателя, упростить конструкцию, уменьшить массу и габариты.Формула изобретения
Электромагнитный линейный двигатель, содержащий электромагнит в виде корпуса, цилиндрического магнитопровода, обмотки возбуждения, якоря, а также ведомое звено, пружины сжатия, направляющие с упорами и стопорные элементы, отличающийся тем, что якорь выполнен в виде двух ферромагнитных полых полуцилиндров, размещенных концентрично с зазором в осевом отверстии магнитопровода с одной из его сторон, обращенных друг к другу поверхностями, полученными при осевом разрезе полого цилиндра вдоль образующей, и прикрепленных к магнитопроводу в средней его части внутренними торцами с помощью пружин сжатия, а ведомое звено выполнено в виде немагнитной пластины, свободно размещенной в осевом отверстии магнитопровода между указанными поверхностями образующих якорь полуцилиндров и имеющей на боковых гранях стопорные элементы, контактирующие с упорами направляющих.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3Электромагнитный привод линейного перемещения
Изобретение относится к электротехнике и может быть использовано в приводах при изготовлении тепловыделяющего элемента. Технический результат состоит в повышении надежности при упрощении изготовления. Электропривод линейного перемещения выполнен из двух параллельных ветвей магнитной цепи, соединенных по концам через ярма электромагнитов. Магнитная цепь между электромагнитами шунтирована подвижным якорем, которым охвачены параллельные ветви магнитной цепи. На ярмах электромагнитов установлены подпружиненные якоря. 3 з.п. ф-лы, 1 ил.
Изобретение относится к области электромагнитного привода линейного перемещения и может быть использовано, например, для реверсивного передвижения оболочки тепловыделяющего элемента при оснащении ее фольгой или таблетками делящегося материала.
Известен тепловыделяющий элемент ядерного реактора, в котором между оболочкой и таблетками делящегося материала помещена вставка, например, из молибденовой фольги, см. патент РФ №2408941, G21C 3/00, 2010.
Поочередное оснащение фольгой и таблетками делящегося материала тепловыделяющего элемента с применением электромагнитного привода линейного перемещения может существенно упростить процесс его изготовления.
Общеизвестен электромагнитный привод линейного перемещения в виде реверсивного электродвигателя, вал которого связан через шкив с другим шкивом ременной передачей, например транспортером.
Недостатком такого привода линейного перемещения является гибкая лента транспортера, неспособная обеспечить точную ориентацию в случае перемещения длинномерных предметов.
Наиболее близким по отличительным признакам предлагаемому является электрический линейный привод по схеме вал электродвигателя-шестерня-зубчатая рейка, см. В.И.Анурьев. Справочник конструктора машиностроителя. М.: Машиностроение, Т. 2, 1978, с.300, рис.27.
Недостатком такого привода является сложность технического выполнения в случае необходимости реверсивного линейного перемещения, например, корпуса тепловыделяющего элемента.
Задачей изобретения является повышение надежности работы электропривода линейного перемещения при упрощении его технического исполнения.
Поставленная задача решается путем его выполнения в виде замкнутой магнитной цепи, которая содержит две параллельные ветви, которые замкнуты по концам через воздушные зазоры и полюса электромагнитов, а магнитная цепь между полюсами шунтирована подвижным подпружиненным якорем.
Реверсирование линейного перемещения обеспечивается поочередной постановкой под напряжение катушек электромагнитов.
Предлагаемый электропривод линейного перемещения приведен на чертеже, где приняты следующие обозначения: ветви 1 магнитопровода, ярмо 2, якорь 3 электромагнита, катушка 4, пружина 5, якорь 6 линейного привода и противоударные пружины 7.
Магнитная цепь электропривода линейного перемещения состоит из двух параллельных ветвей 1, ярем 2 и якорей 3 электромагнитов с катушками 4 и пружинами 5.
Между ярмами 2 электромагнитов размещен подвижный якорь 6 линейного привода, например, с трубчатой оболочкой тепловыделяющего элемента, по обе стороны которого на параллельных ветвях 1 с расстоянием между ними, меньшим диаметра трубчатой оболочки тепловыделяющего элемента, установлены противоударные пружины 7.
Работа электропривода линейного перемещения происходит следующим образом.
При поданном на одну из катушек 4 электромагнита напряжении в соответствующем ярме 2, якоре 3 электромагнита и ветвях 1 магнитопровода возникает магнитный поток, который замыкается через массу подвижного якоря 6.
Возникающая при этом сила стремится минимизировать длину контура магнитного потока и перемещает подвижный якорь 6 в сторону электромагнита с катушкой 4, находящейся в это время под напряжением.
Пружины 7 выполняют роль амортизаторов и смягчают движение подвижного якоря 6 в крайнем положении, в котором катушку 4 электромагнита обесточивают, а пружина 5 размыкает магнитную цепь.
При поданном напряжении на другую катушку 4 электромагнита подвижный якорь 6 перемещается в обратную сторону.
Длина перемещения подвижного якоря 6 соответствует длине, например, тепловыделяющего элемента, а его диаметр, превышающий расстояние между ветвями 1 магнитопровода, позволяет использовать эти ветви в качестве ложемента.
Такое выполнение электропривода линейного перемещения позволяет повысить надежность его работы и упростить его техническое исполнение.
1. Электромагнитный привод линейного перемещения, содержащий электромагниты и исполнительный механизм, отличающийся тем, что исполнительный механизм в нем выполнен из двух параллельных ветвей магнитной цепи, ветви соединены по концам через ярма электромагнитов, магнитная цепь между электромагнитами шунтирована подвижным якорем, которым охвачены параллельные ветви магнитной цепи, а якоря ярем электромагнитов подпружинены.
2. Электромагнитный привод по п.1, отличающийся тем, что между одним из электромагнитов на подвижном якоре размещена, например, оболочка тепловыделяющего элемента.
3. Электромагнитный привод по п.1, отличающийся тем, что расстояние между параллельными ветвями магнитной цепи меньше диаметра оболочки тепловыделяющего элемента.
4. Электромагнитный привод по п.1, отличающийся тем, что по обе стороны подвижного якоря на параллельных ветвях магнитопровода установлены пружины.