
Асинхронный электродвигатель. Устройство и принцип действия. – www.motors33.ru
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
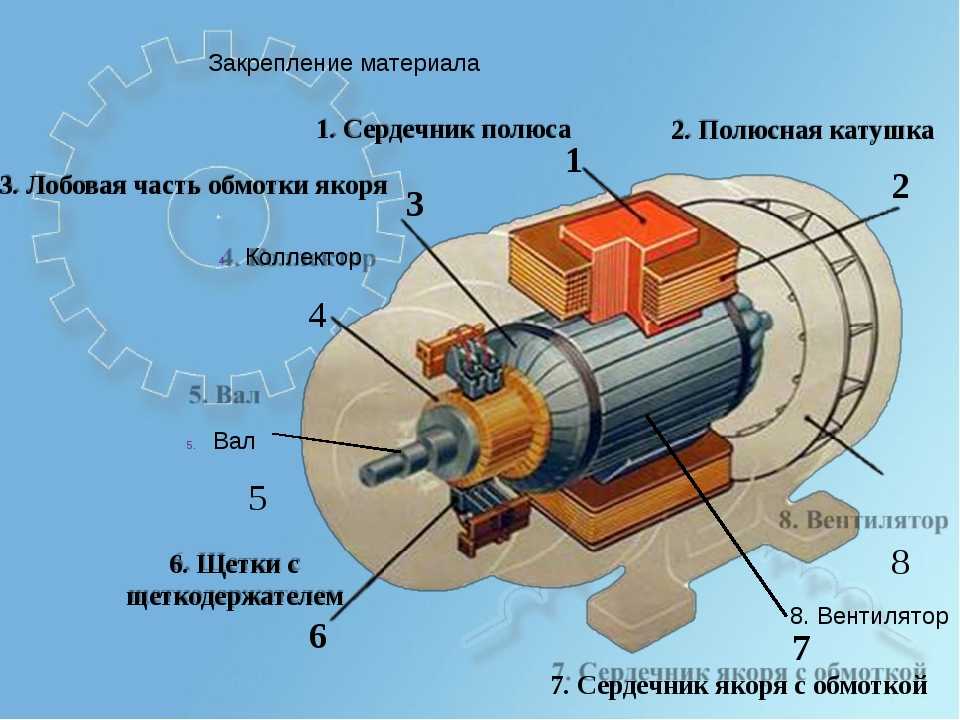
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
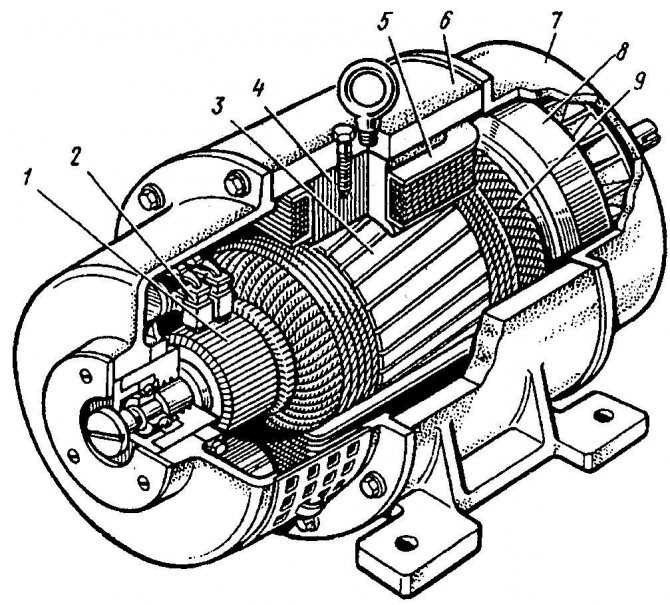
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
✔ Особенности электродвигателя ✔ Статьи компании «Мир Привода»
Электрический двигатель – сложная система, компоненты которой способны перерабатывать электрическую энергию, преобразовывая ее в механическую. Она требуется для активации всевозможных механизмов. Электрический двигатель – ведущий компонент электропривода. В зависимости от режима функционирования электродвигатель может выполнять преобразование энергии в обратном направлении, то есть преобразовывать механическую энергию в электрическую – в этом случае он работает как электрогенератор.
Устройства отличаются по разным параметрами, включая тип механического движения, которое формируют. По этим характеристикам они могут быть вращающимися, линейными и другими. Под понятием электрического двигателя зачастую подразумевается вращающаяся система, которая пользуется сегодня повышенным спросом.
Как работает электродвигатель
В принцип функционирования заложена электромагнитная индукция. Это механизм образования электрополя или тока, что происходит ввиду воздействия колеблющегося магнитного поля. Любое электрическое поле, склонно к изменениям, формирует магнитное – взаимодействие этих двух факторов способствует отталкиванию или притягиванию компонентов статора и ротора.
Это механизм образования электрополя или тока, что происходит ввиду воздействия колеблющегося магнитного поля. Любое электрическое поле, склонно к изменениям, формирует магнитное – взаимодействие этих двух факторов способствует отталкиванию или притягиванию компонентов статора и ротора.
Из чего состоит агрегат
Электродвигатель вращающегося типа состоит из двух основных частей:
статора и ротора. Первый относится к статичным компонентам, второй – к вращающимся. Также в конструкции предусмотрен якорь. Это обмотка, которая является проводником тока при функционировании мотора. Якорь бывает статичным или активным. Зачастую таким наименованием характеризуются подвижный элемент в различных приборах, вырабатывающих электромагнитное поле.
Какие электродвигатели сегодня наиболее актуальны
Существуют разные вариации электрических двигателей, но наиболее востребованными считаются асинхронные и модели постоянного тока
Асинхронные
Отличаются относительно низкой ценой по сравнению с конкурентами. Обладают простой конструкцией. И эти два фактора делают изделие широко востребованным в разных сферах. Особенность конструкций заключается в таком параметре, как скольжение. Он предполагает разницу между частотой вращения магнитного поля статичного элемента и скорости движения ротора. Напряжение на динамичном компоненте машины индуцируется благодаря переменному магнитному полю обмоток статора. Вращение продуцирует взаимодействие электромагнитов неподвижного элемента и магнитного поля ротора, которое образуется ввиду сформированных в нем вихревых токов. По типам обмоток статора бывают двигатели:
Обладают простой конструкцией. И эти два фактора делают изделие широко востребованным в разных сферах. Особенность конструкций заключается в таком параметре, как скольжение. Он предполагает разницу между частотой вращения магнитного поля статичного элемента и скорости движения ротора. Напряжение на динамичном компоненте машины индуцируется благодаря переменному магнитному полю обмоток статора. Вращение продуцирует взаимодействие электромагнитов неподвижного элемента и магнитного поля ротора, которое образуется ввиду сформированных в нем вихревых токов. По типам обмоток статора бывают двигатели:
- Однофазные – агрегаты могут работать только при наличии внешнего фазосдвигающего компонента, например, конденсатора или индуктивного прибора. Эти двигатели отличаются незначительной мощностью.
- С двумя фазами – машины, которые оснащаются двумя обмотками со смещенными по отношению друг к другу фазами. Модели часто встречаются в бытовой технике, а также в оборудовании, которое не требует мощного электродвигателя.

- С тремя и более фазами – многофазные электрические машины, оснащенные тремя+ обмотками статора, смещенными на определенный угол.

Обмотка ротора электродвигателей первого вида – это стержни, которые лишены изоляции, и изготовлены из сочетания меди и алюминия. Они замкнуты с двух сторон кольцами. Такие электродвигатели обладают внушительным набором сильных сторон:
- Упрощенная система пуска. Также оборудование допускает подключение к электросети посредством устройств коммутации.
- Допустимы короткие нагрузки среднего уровня.
- Могут входить в конструкцию оборудования, эксплуатация которого требует высокой мощности. Моторы этого вида не включают в состав скользящих контактов, которые могут минимизировать мощность.
- Несложное техническое обслуживание и ремонтные работы. Это обусловлено тем, что специалисту не потребуется много времени на разборку простой конструкции.
- Невысокая стоимость – модели стоят значительно дешевле синхронных аналогов.
Среди недостатков асинхронных машин можно отметить:
- Невысокая предельная мощность.
- Сложно реализовать возможность корректировки количества вращений за определённую единицу времени.
- Требует высоких стартовых токов при прямом запуске.
Электродвигатели постоянного тока
Еще один вариант часто используемых электрических машин, которые активно применяются в электрическом транспорте, промышленных аппаратах, в исполнительных механизмах.
Моторы постоянного тока имеют много преимуществ:
- Доступна корректировка частоты вращения посредством изменения уровня напряжения в обмотке. Крутящий момент двигателя постоянного тока остается на едином уровне.
- Большой коэффициент полезного действия – этот параметр в ДПТ несколько выше, чем у самых продвинутых асинхронных моделей. При средней нагрузке на валу коэффициент полезного действия возрастает примерно на десять или пятнадцать процентов.
- Относительно компактные размеры, что позволяет использовать ДПТ в качестве микроприводов для различных механизмов.
- Простое управление. Для старта, реверса, корректировки скорости нет необходимости в покупке сложного и дорогостоящего оборудования, в наличии множества устройств коммутации.
- Способен преобразовывать механическую энергию в электрическую – работать в качестве генератора. Двигатели такого плана подходят в качестве стабильных источников постоянного электричества.
- Пусковой момент, позволяющий использовать машину в сочетании с кранами, тяговыми механизмами, конструкциями, предназначенными для подъема грузов.

Двигатели постоянного тока оборудуются:
- Постоянными магнитами – модели одеты в компактные корпуса, и зачастую применяются как микроприводы;
- Электромагнитным возбуждением – наиболее популярное решение, которое используется в бытовой технике, всевозможном оборудовании.
Электрические моторы с электромагнитным возбуждением различаются по типу обмотки статора:
- С параллельным возбуждением – якорь и статор в этом случае подключены параллельно по отношению друг к другу. Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.
- С последовательно подключаемой обмоткой статора. Двигатели этой разновидности обладают высоким пусковым моментом. Они актуальны для транспорта, двигающегося от электричества, в промышленных машинах, где есть нужда в пуске под значительной нагрузкой.
- Смешанное возбуждение. Элемент возбуждения в таких машинах состоит из двух частей. Первая подключена параллельно, вторая – последовательно якорю. Двигатели этой разновидности нужны для функционирования оборудования, требующего высокого пускового момента.
 Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.
Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.Методы управления электрическими двигателями на практике
Управление электрическими машинами предполагает возможность коррекции таких характеристик, как скорость и мощность. К примеру, если на асинхронную машину подать напряжение определенного параметра, она будет продуцировать вращения с номинальной мощность – выйти за эти пределы оборудование не способно. При необходимости снизить или увеличить скорость вращения применяются преобразователи частот. Они призваны сформировать требуемый ритм разгона и остановки, что позволяет быстро и беспроблемно корректировать частоту функционирования агрегата.
При необходимости снизить или увеличить скорость вращения применяются преобразователи частот. Они призваны сформировать требуемый ритм разгона и остановки, что позволяет быстро и беспроблемно корректировать частоту функционирования агрегата.
Чтобы создать нужный разгон и торможение без вмешательства в частоту к работе привлекают устройства плавного пуска. При необходимости в управлении исключительно сценарием старта агрегата внедряют систему «звезда-треугольник». Для активации мотора без устройства плавного пуска актуальны специальные контакторы – с их помощью пуском, тормозом и другими параметры управляют на расстоянии, то есть дистанционно.
Прозвон и сопротивление
Асинхронное оборудование зачастую оснащено 3 обмотками. Каждая из них имеет 2 вывода – их помечают в клеммной коробке. Если выводы доступны, их можно прозвонить с целью получения параметра сопротивления и его сравнения с величинами, снятыми с остальных обмоток. Если величины сопротивления отличаются на один процент и менее, то с высокой вероятностью проблем в работе не имеется.
Для вычисления сопротивления обмоток применяется такой прибор, как омметр. Также следует знать, чем выше мощность агрегата, тем меньше показатель сопротивления обмоток.
Вычисление мощности электрического двигателя
Самый простой метод, который может помочь в определении номинальной мощности двигателя – шильдик. На детали прописана механическая мощность – ее значение зачастую ниже той, которая потребляется, что обусловлено потерями на нагреве и трении. Но если шильдик на системе отсутствует, можно использовать визуальный инструмент – оценка по размерам оборудования. Если мотор оснащен валом большого диаметра, его мощность будет достаточно высокой и наоборот.
Также параметр мощности вычисляется по нагрузке и настройкам, выставленным на защитных приборах, которые подают питание на агрегат. Еще один вариант – старт двигателя на номинальной мощности, что даст валу нагрузку. После этого следует измерить ток специальными клещами. Показатель должен быть идентичен по всем обмоткам. Для определения примерной мощности асинхронной машины, которая подключена по алгоритму «звезда», номинальный ток делят на двое.
Для определения примерной мощности асинхронной машины, которая подключена по алгоритму «звезда», номинальный ток делят на двое.
Увеличение и уменьшение оборотов
Такая функция, как корректировка скорости вращения требуется в следующих режимах функционирования:
- старт;
- остановка;
- работа.
Для этого лучше всего прибегнуть к специальному прибору – частотному преобразователю. Корректировка настроек позволяет достичь различной частоты вращения – она зависит от технических параметров электродвигателя. При этом доступно управление другими настройками оборудования, анализ его состояния во время активности. Можно изменять показатель частоты в плавном и ступенчатом режиме.
Управление оборотами на старте и при установке выполняется посредством устройства плавного пуска. Этот прибор уменьшает пусковой ток благодаря медленному разгону и постепенному повышению оборотов.
Особенности вычисления тока и мощности прибора
Если ток асинхронного устройства известен (узнать можно по шильдику или с помощью изменений в номинальном режиме), но при этом мощность остается неизвестной.
- P – полезная мощность в номинальном состоянии в Ваттах (этот параметр производители зачастую указывают на шильдике).
- I – показатель тока агрегата.
- U – напряжение питания обмоток.
- Cosφ – коэффициент мощности.
- η – КПД.
Если мощность известна, и требуется узнать ток, используют формулу: I = P/(1,73·U·cosφ·η).
Для оборудования с мощность более 1.5 кВт, с подключением типа «звезда» используют правило – для примерного расчёта показателя тока его мощность умножают на два.
Настройка мощности: увеличение
Мощность, которую производитель дублирует на шильдике мотора, зачастую ограничена допустимым током, то есть – нагревом корпуса. При повышении показателя требуется предпринять ряд действий, которые направлены на нормализацию температуры корпуса привода двигателя. Например, выполнив установку самостоятельного вентилятора.
При применении преобразователя частоты для увеличения мощности частоту можно изменить посредством ШИМ, но при этом не стоит допускать чрезмерного нагревания преобразователя частоты. Параметр также можно изменить с помощью редуктора или ременной передачи, однако число оборотов при этом уменьшится.
Параметр также можно изменить с помощью редуктора или ременной передачи, однако число оборотов при этом уменьшится.
Если вышеперечисленные рекомендации не позволяют справиться с поставленной задачей, остается единственный выход из ситуации – заменить маломощный движок на более производительный.
Потеря мощности при подключении 3-фазного двигателя к 1-фазной сети
Такой формат подключения предполагает использование пускового и рабочего конденсатора для сдвига фазы. Номинальная мощность на валу в этом случает останется неизвестной, а потеря составит около тридцати процентов от номинала. Это обусловлено отсутствием возможности сформировывать перекос по фазам при колебании нагрузок.
Исполнения двигателей
Электрические двигатели отличаются методом установки, степенью защиты, по климатическому предназначению. Асинхронные модели устанавливаются одним из двух методов:
- на лапах;
- посредством фланца.
Двигатели, отличающиеся по климатическому исполнению, применяются в разных условиях. Это может быть умеренный климат, преимущественно низкая температура или средняя, жаркое время года. Также двигатели предназначаются для размещения в разных условиях, например, в стенах помещения, на свежем воздухе, под определенной защитой, например, под навесом, который будет защищать оборудование от осадков.
Это может быть умеренный климат, преимущественно низкая температура или средняя, жаркое время года. Также двигатели предназначаются для размещения в разных условиях, например, в стенах помещения, на свежем воздухе, под определенной защитой, например, под навесом, который будет защищать оборудование от осадков.
Производители присваивают продукции определенный класс защиты, который чаще всего характеризует степень защищенности от пыли, воды. Зачастую в продаже представлены приводы с сертификацией IP 55.
Для чего двигателю нужен тормоз
В некоторых видах оборудования, например, в лифтах, грузоподъемных устройствах, при торможении мотора нужна фиксация вала в статичном положении. Для этого используется электромагнитный тормоз, включённый в состав агрегата – он прикреплен к тыльной части. Управление этим компонентом выполняется посредством частотного преобразователях или микросхемы.
Как двигатель обозначается на электрических схемах
Электрический двигатель отображается на схемах посредством буквы «M», которая очерчена кругом.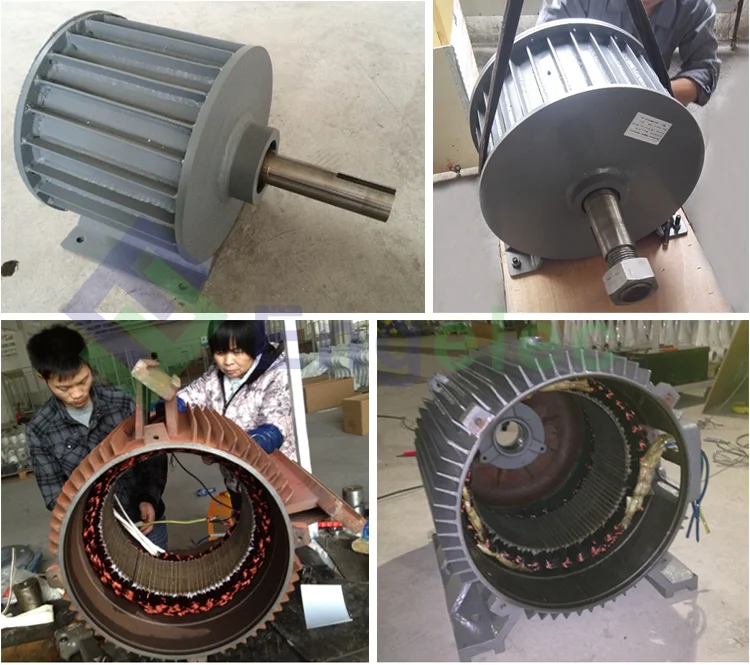 Также схемы могут включать порядковый номер продукта, число фаз, разновидность тока, метод подключения обмоток, показатель мощности.
Также схемы могут включать порядковый номер продукта, число фаз, разновидность тока, метод подключения обмоток, показатель мощности.
Причины перегрева двигателя
Двигатель – активное оборудование, которое может перегреваться, а причинами этому являются:
- естественный износ подшипников, что создает более активное трение между деталями и провоцирует перегрев;
- высокая нагрузка в области вала;
- некорректное напряжение;
- пропадание фазы;
- короткое замыкание, произошедшее в обмотке;
- отсутствие нормального охлаждения.
Нагрев электродвигателя в негативном ключе отражается на его долговечности и коэффициенте полезного действия. Также высокая температура может со временем спровоцировать износ привода. В этом случае может потребоваться сложный и дорогостоящий ремонт или полная замена агрегата.
Частые неисправности электродвигателей
Отмечают два типа поломок, к которым склонны большинство моделей электрических двигателей.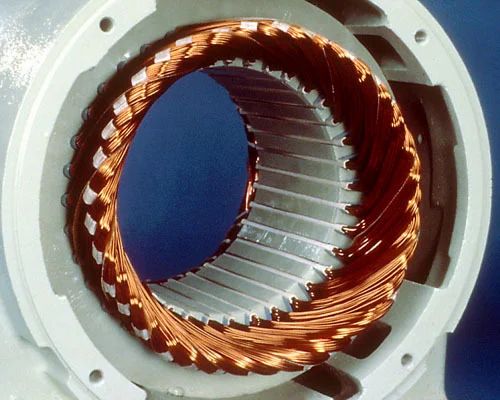 Они могут носить механический и электрический характер.
Они могут носить механический и электрический характер.
Электрические неисправности
Предполагают проблемы в обмотке:
- замыкание между витками;
- замыкание обмотки на корпус;
- механическое повреждение обмотки.
Механические неисправности
Предполагают:
- естественный износ в подшипниках, повешенное трение;
- прокручивание ротора на валу;
- износ корпуса мотора;
- поломка, связанная с повреждением крыльчатки обдува
Чтобы не допускать проблемных ситуаций, пользователю следует позаботиться о своевременной замене подшипников. Важно учитывать их износ, срок эксплуатации мотора. Это же относится к другим деталям. Электрические неисправности требуют только профессионального ремонта, ведь неаккуратное действие со стороны пользователя может потребовать замены всего агрегата.
Как применяются электрические двигатели
На сегодня электродвигатели – основные потребители энергии. Около 50% этого ресурса приходится на различные варианты оборудования. Двигатели широко востребованы во многих сферах промышленности и жизни в целом. Они применяются для работы бытовой техники, производственного оборудования, для транспорта, спецтехники.
Около 50% этого ресурса приходится на различные варианты оборудования. Двигатели широко востребованы во многих сферах промышленности и жизни в целом. Они применяются для работы бытовой техники, производственного оборудования, для транспорта, спецтехники.
Основные направления, в которых используется это оборудование:
- металлообрабатывающие и шлифовальные предприятия;
- деревообрабатывающие заводы, конвейерное производство;
- для изготовления компрессионного, климатического оборудования;
- в строительной сфере – моторы включены в конструкции спецтехники и оборудования для подъёма, опускания строительного оборудования;
- в системах лифтов, в отопительном оборудовании, в системах вентиляции;
- в бытовых устройствах, начиная холодильником, заканчивая уборочной техникой;
- для персональных компьютеров, ноутбуков.
Преимущества электрических двигателей
Это оборудование имеет множество сильных сторон, которые обеспечивают его востребованность:
- относительно простые конструкции;
- простая установка и эксплуатация;
- пригодность к ремонту – благодаря высококачественным компонентам, которые используют производители, современные двигатели способны стабильно работать годами;
- в продаже доступен солидный выбор устройств, отличающихся мощностью и другими техническими характеристиками. Благодаря этому найти вариант под определенное оборудование не составит труда;
- доступность опции регулировки скорости вращения вала мотора;
- высокая скорость функционирования, готовность к запуску и остановке;
- автоматическое управление оборудованием, доступное в большинстве случаев;
- функция реверса;
- для установки и технического обслуживания со стороны пользователя не потребуется крупных финансовых вложений;
- длительный эксплуатационный период;
- высокий коэффициент полезного действия;
- оборудование изготавливается из экологически безопасных материалов и компонентов. Работа двигателя не предполагает негативное влияние на здоровье пользователей и состояние природы.
 Благодаря этому найти вариант под определенное оборудование не составит труда;
Благодаря этому найти вариант под определенное оборудование не составит труда;Но к главному достоинству электрического привода можно отнести возможность его контроля и регулировки, при этом местоположение оборудования не имеет принципиального значения – можно включать и отключать устройство на расстоянии. Эклектический мотор не продуцирует неприятного шума, не способен нанести вреда здоровью человека в отличие от механических аналогов.
Эклектический мотор не продуцирует неприятного шума, не способен нанести вреда здоровью человека в отличие от механических аналогов.
Электродвигатели, преобразование энергии – РегионПривод
- Классификация электродвигателей
- Основные виды электродвигателей
- Виды электродвигателей по степени защищенности от внешней среды
- Взрывозащищенные электродвигатели
- Защищенные электродвигатели
- Закрытые электродвигатели
- Электродвигатели с тормозом
- Регулирование скорости вращения электродвигателя
- Применение электродвигателя
- Принцип работы электродвигателя
- Принцип работы асинхронного электродвигателя
- Устройство электродвигателя
- Подключение электродвигателя
- Расчёт мощности электродвигателя
- Расчет пускового тока электродвигателя
- Формула расчета пускового тока электродвигателей
Электродвигатель – это механизм, который служит для преобразования электрической энергии в механическую. В основе принципа работы любого электродвигателя находится закон электромагнитной индукции. Обычно электродвигатель состоит из неподвижной части (статора) и ротора (или якоря), в которых создаются неподвижные или вращающиеся магнитные поля. Электродвигатели бывают самых различных типов и модификаций, широко применяются во многих отраслях человеческой деятельности, и представляют собой один из главных компонентов в механизмах и приводах самого различного назначения. ОТ характеристик электродвигателя напрямую зависит эффективность производства.
В основе принципа работы любого электродвигателя находится закон электромагнитной индукции. Обычно электродвигатель состоит из неподвижной части (статора) и ротора (или якоря), в которых создаются неподвижные или вращающиеся магнитные поля. Электродвигатели бывают самых различных типов и модификаций, широко применяются во многих отраслях человеческой деятельности, и представляют собой один из главных компонентов в механизмах и приводах самого различного назначения. ОТ характеристик электродвигателя напрямую зависит эффективность производства.
Классификация электродвигателей
Главными частями, из которых состоит Электродвигатели, являются статор и ротор. Ротор — та часть двигателя, которая вращается, а статор – которая остается неподвижной. Принцип работы электродвигателя заключен во взаимодействии вращающегося магнитного поля, создаваемого обмоткой статора и электрического тока, который находится в замкнутой обмотке ротора. Этот процесс инициирует вращение ротора в направлении поля.
Основные виды электродвигателей:
- Двигатель переменного тока;
- Двигатель постоянного тока;
- Многофазный двигатель;
- Однофазный двигатель;
- Вентильный двигатель;
- Шаговый двигатель;
- Универсальный коллекторный двигатель.
Если говорить о таких электродвигателях как асинхронные электродвигатели, то они относятся к виду двигателей переменного тока. Такие двигатели бывают как однофазные электродвигатели, так и двух- и трехфазные. В асинхронных электродвигателях частота переменного тока в обмотке не совпадает с частотой вращения ротора. Процесс работы асинхронного электродвигателя обеспечивается разницей во времени генерации магнитных полей статора и ротора. Вращение ротора из-за этого задерживается относительно поля статора. Купить электродвигатель асинхронного типа можно для машин, в которых не требуются особые условия работы пускового механизма.
Виды электродвигателей по степени защищенности от внешней среды:
- Взрывозащищенные;
- Защищенные;
- Закрытые.
Взрывозащищенные электродвигатели имеют прочный корпус, который если случится взрыв двигатели, предотвратит поражение всех других частей механизма и воспрепятствует возникновению пожара.
Защищенные электродвигатели при эксплуатации закрыты специальными заслонками и сетками, которые защищают механизм от попадания инородных предметов. Используются в среде, где нет повышенной влажности воздуха и примесей газов, пыли, дыма и химических веществ.
Закрытые электродвигатели имеют специальную оболочку, которая не дает проникать пыли, газам, влаге и другим веществам и элементам, которые способны причинить вред механизму двигателя. Такие электродвигатели бывают герметичными и негерметичными.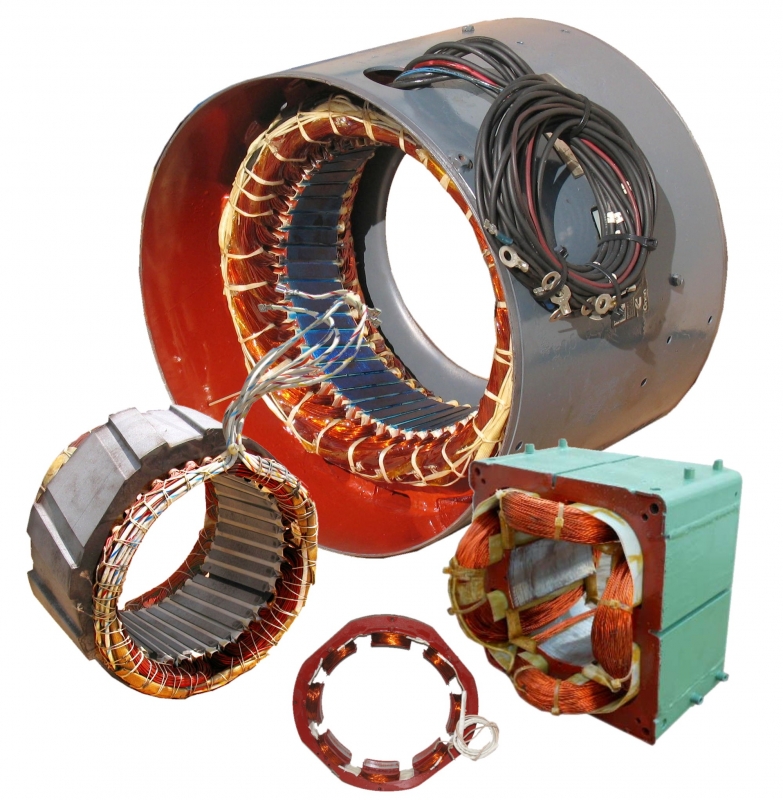
Электродвигатели siemens и электродвигатели able выпускаются в большинстве вышеперечисленных видов электродвигателей, и среди них довольно просто выбрать самый оптимальный вариант.
Электродвигатели с тормозом
Тормозные электродвигатели обычно устанавливаются на таком оборудовании, которому необходимо иметь возможность осуществить мгновенную остановку. Это может быть конвейерное или станочное оборудование, или другое оборудование, где остановка обусловлена требованиями техники безопасности. Они активно применяются в транспортных лифтах, подъемных кранах, складских укладочных машинах, прокатном и швейном оборудовании, эскалаторах, станках для дерева и металла, задвижках, прокатном оборудовании – одним словом везде, где необходима быстрая остановка системы в определенном положении и в определенное время.
Если не вдаваться в подробности, электродвигатель с тормозом представляет собой обычный промышленный асинхронный электродвигатель, в котором установлен электромагнитная тормозная система. Это обуславливает тот факт, что от обычных двигателей электродвигатель с тормозом отличается только длиной, тогда как все посадочные и соединительные элементы остаются на прежнем месте. Длина изменяется из-за необходимости установки на двигатель специального кожуха. Как и обычные двигатели, в зависимости от типа питания, электродвигатели с тормозом делятся на двигатели, питаемые переменным током, и электродвигатели, питаемые постоянным током.
Это обуславливает тот факт, что от обычных двигателей электродвигатель с тормозом отличается только длиной, тогда как все посадочные и соединительные элементы остаются на прежнем месте. Длина изменяется из-за необходимости установки на двигатель специального кожуха. Как и обычные двигатели, в зависимости от типа питания, электродвигатели с тормозом делятся на двигатели, питаемые переменным током, и электродвигатели, питаемые постоянным током.
Главными элементами тормозной системы электродвигателя являются:
- Электромагнит, состоящий из корпуса, в котором находятся катушка или набор катушек;
- Якорь, представляющий собой исполнительный элемент, или поверхность для тормозного диска;
- Сам тормозной диск, который перемещается по зубчатой втулке, закрепленной на валу заторможенного привода или двигателя.
Когда двигатель находится в состоянии покоя, он заторможен. Пружинный нажим на якорь оказывает, в свою очередь, давление на тормозной диск, в связи с чем возникает его блокировка. Когда на катушку электромагнита подается электрический ток, возбужденный электромагнит притягивает к себе якорь, и происходит разблокировка тормоза. Нажим якоря снимается, и возникает свободное вращение вала электрического двигателя. Электродвигатели с тормозом маркируются буквой «Е», или «Е2» (для двигателей с ручной системой торможения).
Когда на катушку электромагнита подается электрический ток, возбужденный электромагнит притягивает к себе якорь, и происходит разблокировка тормоза. Нажим якоря снимается, и возникает свободное вращение вала электрического двигателя. Электродвигатели с тормозом маркируются буквой «Е», или «Е2» (для двигателей с ручной системой торможения).
Регулирование скорости вращения электродвигателя
Вопрос регулирования скорости вращения электродвигателя очень актуален, ведь снижение и повышение оборотов электродвигателя может понадобится в самых разнообразных механизмах, от бытовых приборов, таких как швейных машин или кухонной техники, до промышленных механизмов и станкового оборудования. Казалось бы, самый простой способ – просто понизить питающее напряжение электродвигателя. Это подходит для двигателей постоянного тока, регуляторы напряжения постоянного тока достаточно просты в производстве и доступны. Однако, в настоящее время основная масса приборов, механизмов и инструментов, занятых в производстве, базируются на асинхронных двигателях переменного тока. В этом случае при понижении напряжения электродвигатель резко снижает количество оборотов, теряет мощность и полностью останавливается. Как понизить обороты электродвигателя, или как увеличить их? Для регулировки скорости вращения таких электродвигателей и были разработаны частотные инверторные преобразователи, или как их чаще называют – частотники.
В этом случае при понижении напряжения электродвигатель резко снижает количество оборотов, теряет мощность и полностью останавливается. Как понизить обороты электродвигателя, или как увеличить их? Для регулировки скорости вращения таких электродвигателей и были разработаны частотные инверторные преобразователи, или как их чаще называют – частотники.
Область применения частотных преобразователей достаточно обширна. Они востребованы в станках и электроприводах промышленных механизмов, конвейерах, системах вытяжной вентиляции и так далее. Принцип работы частотника заключается в правиле вычисления угловой скорости вращения вала, которое включает в себя такой фактор как частота питающей сети. Таким образом, меняя частоту питания обмотки электродвигателя, можно регулировать скорость вращения ротора двигателя в прямой зависимости, таким образом уменьшить обороты электродвигателя или повысить их. Эти приборы имеют также название «инверторы», благодаря методу, при помощи которого решается задача одновременного регулирования частоты и напряжения на выходе преобразователя. Все частотные преобразователи в обязательном порядке маркируются табличками, ан которых указаны их характеристики:
Все частотные преобразователи в обязательном порядке маркируются табличками, ан которых указаны их характеристики:
- Максимально возможная мощность электродвигателя;
- Напряжение запитывающей сети;
- Количество фаз (однофазный, трехфазный).
Большинство промышленных частотных преобразователей предназначены для работы в трехфазных сетях переменного тока, однако встречаются и другие модели, например частотники для однофазных двигателей.
Применение электродвигателя
Жизнь современного человека тяжело представить без такого механизма как электродвигатель. Оглянитесь вокруг – они получил практически повсеместное распространение. Сегодня они используются не только во всех отраслях промышленности, но и в транспорте, предметах и устройствах, окружающих в повседневной жизни, на работе и дома. Фены, вентиляторы, швейные машины, строительные инструменты – вот далеко не полный перечень устройств, где используются электродвигатели.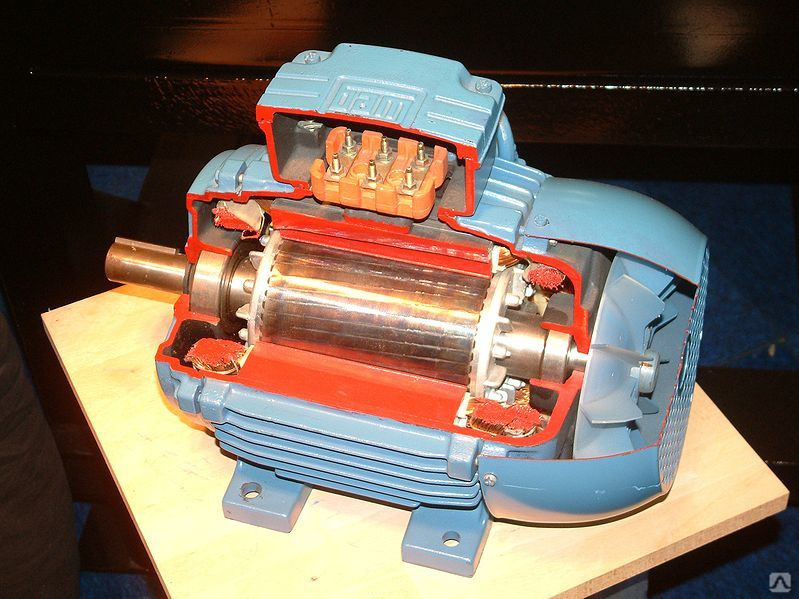
Особой надежностью отличаются именно асинхронные электродвигатели, благодаря чему они находят широкое применение в приводах металлообрабатывающих, деревообрабатывающих станков и других промышленных станков, в кузнечных прессах, грузоподъёмных машинах, лифтах, ткацких, швейных и землеройных машинах, промышленных вентиляторах, компрессорах, насосах, центрифугах, бетономешалках. Крановые электродвигатели используются в капитальном, промышленном и гражданском строительстве, в горнодобывающей, металлургической отраслях, энергетике, транспорте.
Метро, трамвай, троллейбус – все эти виды транспорта обязаны своему существованию электродвигателю. Любой офис или жилой дом сегодня невозможно представить без кондиционера или системы очистки воздуха – в них тоже применяются электродвигатели. Функционирование большинства современного оборудования невозможно без электродвигателя, в связи с чем очень многое зависит от качества и надежности этого механизма. Его поломка может привести к очень печальным результатам, вплоть до остановки производства и огромным финансовым убыткам. Следовательно, приобретать электродвигатели можно только у надёжного и проверенного поставщика, который гарантирует качество продукции.
Следовательно, приобретать электродвигатели можно только у надёжного и проверенного поставщика, который гарантирует качество продукции.
Принцип работы электродвигателя
Принцип работы электродвигателя заключается в эффекте магнетизма, который позволяет эффективно преобразовывать электрическую энергию в механическую. Принцип преобразования энергии в разных типах электродвигателей одинаковый, для всех типов электродвигателей, но конструкция двигателей и способы контроля скорости вращающегося момента могут различаться. Всем со школьной скамьи известен простейший пример электродвигателя – когда рамка вращается между полюсами постоянного магнита. Разумеется, устройство электродвигателя, который применяется в промышленных механизмах или бытовых приборах намного сложнее. Давайте рассмотрим как работает асинхронный электродвигатель, который получил наибольшее распространение в промышленности.
Принцип работы асинхронного электродвигателя.
Принцип действия асинхронного двигателя, как и прочих, основан на использовании вращающегося магнитного поля. Скорость вращения магнитного поля принято называть синхронной, так как она соответствует скорости вращения магнита. При этом скорость вращения цилиндра принято называть асинхронной, то есть не совпадающей со скоростью вращения магнита. Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением. Чтобы заставить заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора обычно используется трехфазный ток.
Скорость вращения магнитного поля принято называть синхронной, так как она соответствует скорости вращения магнита. При этом скорость вращения цилиндра принято называть асинхронной, то есть не совпадающей со скоростью вращения магнита. Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением. Чтобы заставить заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора обычно используется трехфазный ток.
Устройство электродвигателя
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя, размещаются три обмотки, сети трехфазного тока расположенные одна относительно другой под углом 120°. Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя. Если обмотки соединить между собой и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся. Суммарный магнитный поток в тоже время будет менять свое направление с изменением направления тока в обмотках статора (полюсов). При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим, таким образом асинхронный электродвигатель.
Суммарный магнитный поток в тоже время будет менять свое направление с изменением направления тока в обмотках статора (полюсов). При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим, таким образом асинхронный электродвигатель.
Обмотки статора могут быть соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником». Если поменять местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное. Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора. Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Подключение электродвигателя
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой. Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе. В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе. В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя, подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка. В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором. Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.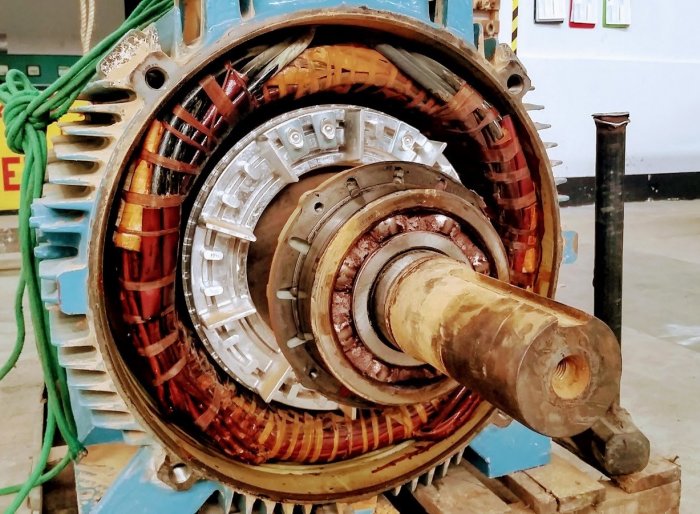
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Расчёт мощности электродвигателя
Выбирая электродвигатель необходимо ориентироваться на потребляемую оборудованием мощность. Определить мощность можно расчетным путем, используя следующие формулы и коэффициенты:
Мощность на валу электродвигателя определяется по следующей формуле:
, где
Рм – потребляемая механизмом мощность;
ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов. При выборе электродвигателя запас должен быть небольшой мощности. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
При выборе электродвигателя запас должен быть небольшой мощности. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Расчет пускового тока электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток:
Номинальный ток трехфазных электродвигателей переменного тока:
, где
PH – номинальная мощность электродвигателя;
UH — номинальное напряжение электродвигателя,
ηH — КПД электродвигателя;
cosφH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя. Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей.

, где
IH – номинальное значение тока;
Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Двигатель переменного тока
— основные свойства, терминология и теория Двигатель переменного тока
преобразует электрическую энергию в механическую. В двигателе переменного тока используется переменный ток, другими словами, направление тока периодически меняется. В случае обычного переменного тока, который используется на большей части территории Соединенных Штатов, ток меняет направление 120 раз в секунду. Этот ток называется «переменный ток 60 циклов» или «переменный ток 60 Гц» в честь г-на Герца, который первым придумал концепцию переменного тока. Другая характеристика текущего потока состоит в том, что он может изменяться по количеству. Например, поток может встречаться в 5 ампер, 10 ампер или 100 ампер.
Было бы довольно трудно, если бы ток, скажем, 100 ампер в один момент протекал в положительном направлении, а затем протекал с такой же силой в отрицательном направлении. Вместо этого, по мере того, как ток готовится изменить направление, он сужается до тех пор, пока не достигнет нулевого потока, а затем постепенно нарастает в другом направлении. Максимальный ток (пики линии) в каждом направлении превышает указанное значение (в данном случае 100 ампер). Поэтому указанное значение дано как среднее. Важно помнить, что сила магнитного поля, создаваемого электромагнитной катушкой переменного тока, увеличивается и уменьшается с увеличением и уменьшением этого переменного тока.
Магазин ПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Двигатель переменного тока состоит из двух основных электрических частей: «статора» и «ротора», как показано на рисунке 8. Статор является неподвижным электрическим компонентом. Он состоит из группы отдельных электромагнитов, расположенных таким образом, что они образуют полый цилиндр, причем один полюс каждого магнита обращен к центру группы. Термин «статор» происходит от слова «стационарный». Тогда статор является неподвижной частью двигателя. Ротор представляет собой вращающийся электрический компонент. Он также состоит из группы электромагнитов, расположенных вокруг цилиндра, полюса которых обращены к полюсам статора. Ротор расположен внутри статора и закреплен на валу двигателя. Термин «ротор» происходит от слова вращающийся. Таким образом, ротор является вращающейся частью двигателя. Задача этих компонентов двигателя — заставить вращаться ротор, который, в свою очередь, будет вращать вал двигателя. Это вращение произойдет из-за ранее обсуждавшегося магнитного явления, когда разные магнитные полюса притягиваются друг к другу, а одинаковые полюса отталкиваются. Если вы постепенно меняете полярность полюсов статора таким образом, что их объединенное магнитное поле вращается, то ротор будет следовать и вращаться вместе с магнитным полем статора.
Он состоит из группы отдельных электромагнитов, расположенных таким образом, что они образуют полый цилиндр, причем один полюс каждого магнита обращен к центру группы. Термин «статор» происходит от слова «стационарный». Тогда статор является неподвижной частью двигателя. Ротор представляет собой вращающийся электрический компонент. Он также состоит из группы электромагнитов, расположенных вокруг цилиндра, полюса которых обращены к полюсам статора. Ротор расположен внутри статора и закреплен на валу двигателя. Термин «ротор» происходит от слова вращающийся. Таким образом, ротор является вращающейся частью двигателя. Задача этих компонентов двигателя — заставить вращаться ротор, который, в свою очередь, будет вращать вал двигателя. Это вращение произойдет из-за ранее обсуждавшегося магнитного явления, когда разные магнитные полюса притягиваются друг к другу, а одинаковые полюса отталкиваются. Если вы постепенно меняете полярность полюсов статора таким образом, что их объединенное магнитное поле вращается, то ротор будет следовать и вращаться вместе с магнитным полем статора.
Как показано на рис. 9, статор имеет шесть магнитных полюсов, а ротор — два полюса. В момент времени 1 полюса статора A-1 и C-2 являются северными полюсами, а противоположные полюса, A-2 и C-1, являются южными полюсами. S-полюс ротора притягивается двумя N-полюсами статора, а два южных полюса статора притягиваются к N-полюсу ротора. Во время 2 полярность полюсов статора меняется так, что теперь полюса C-2, B-1 и N, а C-1 и B-2 являются полюсами S. Затем ротор вынужден повернуться на 60 градусов, чтобы выровняться с полюсами статора, как показано на рисунке. В момент 3 B-1 и A-2 равны N. В момент 4 A-2 и C-1 равны N. При каждом изменении противоположные полюса статора притягиваются к полюсам ротора. Таким образом, когда магнитное поле статора вращается, ротор вынужден вращаться вместе с ним.
Одним из способов создания вращающегося магнитного поля в статоре двигателя переменного тока является использование трехфазного источника питания для катушек статора.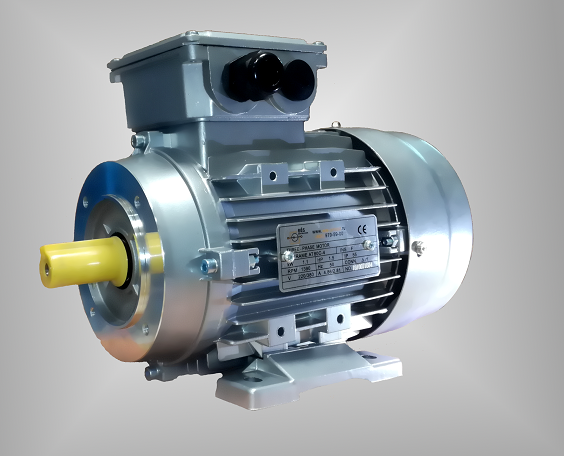 Чтобы создать вращающееся магнитное поле в статоре трехфазного двигателя переменного тока, все, что нужно сделать, это правильно намотать катушки статора и правильно подключить провода питания. Соединение для 6-полюсного статора показано на рисунке 11. Каждая фаза трехфазного источника питания подключена к противоположным полюсам, а соответствующие катушки намотаны в одном направлении. Полярность полюсов электромагнита определяется направлением тока, протекающего через катушку. Следовательно, если два противоположных электромагнита статора намотаны в одном направлении, полярность противоположных полюсов должна быть противоположной. Когда полюс A1 — это N, полюс A2 — это S, а когда полюс B1 — это N, B2 — это S и так далее.
Чтобы создать вращающееся магнитное поле в статоре трехфазного двигателя переменного тока, все, что нужно сделать, это правильно намотать катушки статора и правильно подключить провода питания. Соединение для 6-полюсного статора показано на рисунке 11. Каждая фаза трехфазного источника питания подключена к противоположным полюсам, а соответствующие катушки намотаны в одном направлении. Полярность полюсов электромагнита определяется направлением тока, протекающего через катушку. Следовательно, если два противоположных электромагнита статора намотаны в одном направлении, полярность противоположных полюсов должна быть противоположной. Когда полюс A1 — это N, полюс A2 — это S, а когда полюс B1 — это N, B2 — это S и так далее.
На рис. 12 показано, как создается вращающееся магнитное поле. В момент времени 1 ток в полюсах фазы «A» положительный, а в полюсе A-1 — N. Ток в полюсах фазы «C» отрицательный, что делает C-2 полюсом N, а C-1 — S. В фазе «В» ток отсутствует, поэтому эти полюса не намагничены. В момент времени 2 фазы сместились на 60 градусов, в результате чего полюса C-2 и B-1 стали оба N, а C-1 и B-2 оба S. Таким образом, по мере того, как фазы сдвигают свой ток, результирующие полюса N и S перемещаются. по часовой стрелке вокруг статора, создавая вращающееся магнитное поле. Ротор действует как стержневой магнит, притягиваемый вращающимся магнитным полем.
В момент времени 2 фазы сместились на 60 градусов, в результате чего полюса C-2 и B-1 стали оба N, а C-1 и B-2 оба S. Таким образом, по мере того, как фазы сдвигают свой ток, результирующие полюса N и S перемещаются. по часовой стрелке вокруг статора, создавая вращающееся магнитное поле. Ротор действует как стержневой магнит, притягиваемый вращающимся магнитным полем.
До сих пор мало что было сказано о роторе. В предыдущих примерах предполагалось, что полюса ротора были намотаны катушками, как и полюса статора, и питались постоянным током для создания полюсов с фиксированной полярностью. Кстати, именно так работает синхронный двигатель переменного тока. Однако большинство двигателей переменного тока, используемых сегодня, не являются синхронными двигателями. Вместо этого так называемые «асинхронные» двигатели являются рабочими лошадками промышленности. Так чем же отличается асинхронный двигатель? Большая разница заключается в том, как ток подается на ротор. Это не внешний источник питания. Как вы можете догадаться из названия двигателя, вместо него используется индукционная техника. Индукция — еще одна характеристика магнетизма. Это естественное явление, которое возникает, когда проводник (алюминиевые стержни в случае ротора, см. рис. 13) проходит через существующее магнитное поле или когда магнитное поле проходит мимо проводника. В любом случае их относительное движение вызывает протекание электрического тока в проводнике. Это называется «индуцированным» током. Другими словами, в асинхронном двигателе протекание тока в роторе вызвано не каким-либо прямым подключением проводников к источнику напряжения, а скорее влиянием проводников ротора, пересекающих линии потока, создаваемые магнитными полями статора. Индуцированный ток, создаваемый в роторе, приводит к возникновению магнитного поля вокруг проводников ротора, как показано на рисунке 14. Это магнитное поле вокруг каждого проводника ротора заставляет каждый проводник ротора действовать как постоянный магнит на рисунке 9.
Как вы можете догадаться из названия двигателя, вместо него используется индукционная техника. Индукция — еще одна характеристика магнетизма. Это естественное явление, которое возникает, когда проводник (алюминиевые стержни в случае ротора, см. рис. 13) проходит через существующее магнитное поле или когда магнитное поле проходит мимо проводника. В любом случае их относительное движение вызывает протекание электрического тока в проводнике. Это называется «индуцированным» током. Другими словами, в асинхронном двигателе протекание тока в роторе вызвано не каким-либо прямым подключением проводников к источнику напряжения, а скорее влиянием проводников ротора, пересекающих линии потока, создаваемые магнитными полями статора. Индуцированный ток, создаваемый в роторе, приводит к возникновению магнитного поля вокруг проводников ротора, как показано на рисунке 14. Это магнитное поле вокруг каждого проводника ротора заставляет каждый проводник ротора действовать как постоянный магнит на рисунке 9. пример. Когда магнитное поле статора вращается, из-за воздействия трехфазного источника питания переменного тока наведенное магнитное поле ротора притягивается и будет следовать за вращением. Ротор соединен с валом двигателя, поэтому вал вращается и приводит в движение соединительную нагрузку.
пример. Когда магнитное поле статора вращается, из-за воздействия трехфазного источника питания переменного тока наведенное магнитное поле ротора притягивается и будет следовать за вращением. Ротор соединен с валом двигателя, поэтому вал вращается и приводит в движение соединительную нагрузку.
Электродвигатели переменного тока доступны в 3 типах; 3-фазный IEC, однофазный NEMA и трехфазный NEMA. Эти двигатели переменного тока имеют мощность от одной восьмой до 750 л.с. Диапазон напряжений от 115 до 575. Прежде чем сделать окончательный выбор, проконсультируйтесь со специалистом по применению двигателей. Правильный выбор двигателя может сэкономить энергию и со временем снизить затраты на эксплуатацию вашей системы.
Серия учебных курсов по электротехнике и электронике ВМФ (NEETS), модуль 5, с 4-1 по 4-10
NEETS Модуль 5 – Введение в генераторы и двигатели
Страницы i, 1−1, 1−11, 1−21, 1−31, 2−1, 2−11, 3−1, 3−11, 4−1, 4−11, индекс
Глава 4
ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Цели обучения
По завершении этой главы вы сможете:
1. Перечислите три основных типа двигателей переменного тока.
и описать характеристики каждого типа.
Перечислите три основных типа двигателей переменного тока.
и описать характеристики каждого типа.
2. Опишите характеристики серийного двигателя, позволяют использовать его в качестве универсального двигателя.
3. Объясните отношения отдельных фаз многофазные напряжения, поскольку они создают вращающиеся магнитные поля в двигателях переменного тока.
4. Опишите размещение обмоток статора в двухфазных двигателях переменного тока, использующих вращающиеся поля.
5. Перечислите сходства и различия между обмотками статора двухфазных и трехфазных двигателей переменного тока.
6. Укажите основное применение синхронных двигателей и объясните характеристики, которые делают их подходящими. для этого приложения.
7. Опишите особенности, которые делают асинхронный двигатель переменного тока наиболее широко используемым из
электродвигатели.
8. Опишите разницу между вращающимся полем многофазных двигателей и «кажущееся» вращающееся поле однофазных двигателей.
9. Объясните работу двухфазных обмоток в однофазные асинхронные двигатели переменного тока.
10. Опишите влияние заштрихованных полюсов в однофазном, индукционном моторы.
Введение
Большинство энергосистем на берегу и на плаву вырабатывают переменный ток. По этой причине большинство
двигатели, используемые во всем флоте, предназначены для работы от переменного тока. Существуют и другие преимущества использования двигателей переменного тока.
помимо широкой доступности переменного тока. Как правило, двигатели переменного тока стоят меньше, чем двигатели постоянного тока. Некоторые типы двигателей переменного тока
не используйте щетки и коллекторы. Это устраняет многие проблемы обслуживания и износа. Он также устраняет
проблема опасного искрения.
Двигатель переменного тока особенно хорошо подходит для приложений с постоянной скоростью. Это связано с тем, что его скорость определяется частотой переменного напряжения, подаваемого на клеммы двигателя.
Двигатель постоянного тока лучше подходит для некоторых применений, чем двигатель переменного тока, например, для тех, где требуется переменная скорость. переменного тока двигатель также может быть выполнен с переменной скоростью, но только в определенных пределах.
Промышленные постройки двигатели переменного тока разных размеров, форм и номиналов для самых разных видов работ. Эти двигатели предназначены для использования как с многофазными, так и с однофазными энергосистемами. Здесь невозможно охватить все аспекты тема двигателей переменного тока. В этой главе рассматриваются только принципы наиболее часто используемых типов.
4-1
В этой главе двигатели переменного тока будут разделены на (1) последовательные, (2) синхронные и (3) асинхронные двигатели. Будут рассмотрены однофазные и многофазные двигатели. Синхронные двигатели для целей данной главы могут быть
рассматриваются как многофазные двигатели с постоянной скоростью, роторы которых питаются постоянным напряжением. Асинхронные двигатели,
однофазные или многофазные, роторы которых питаются от индукции, являются наиболее часто используемыми двигателями переменного тока.
серийный двигатель переменного тока, в некотором смысле, является знакомым типом двигателя. Он очень похож на двигатель постоянного тока, описанный в
главу 2 и послужит мостом между старым и новым.
Будут рассмотрены однофазные и многофазные двигатели. Синхронные двигатели для целей данной главы могут быть
рассматриваются как многофазные двигатели с постоянной скоростью, роторы которых питаются постоянным напряжением. Асинхронные двигатели,
однофазные или многофазные, роторы которых питаются от индукции, являются наиболее часто используемыми двигателями переменного тока.
серийный двигатель переменного тока, в некотором смысле, является знакомым типом двигателя. Он очень похож на двигатель постоянного тока, описанный в
главу 2 и послужит мостом между старым и новым.
Q1. Каковы три основных типа двигатели переменного тока?
ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА серии
Последовательный двигатель переменного тока электрически аналогичен последовательному двигателю постоянного тока. Обратитесь к рисунку 4-1 и используйте левосторонний
Правило полярности катушек. Вы можете видеть, что мгновенные магнитные полярности якоря и поля
противостоят друг другу и приводят к двигательным действиям. Теперь измените ток, поменяв полярность на входе. Примечание
что магнитная полярность поля по-прежнему противоположна магнитной полярности якоря. Это потому, что обращение
воздействует как на якорь, так и на поле. Вход переменного тока заставляет эти реверсирования происходить непрерывно.
Теперь измените ток, поменяв полярность на входе. Примечание
что магнитная полярность поля по-прежнему противоположна магнитной полярности якоря. Это потому, что обращение
воздействует как на якорь, так и на поле. Вход переменного тока заставляет эти реверсирования происходить непрерывно.
Рис. 4-1. — Серийный двигатель переменного тока.
Конструкция двигателя переменного тока немного отличается от двигателя постоянного тока. Специальные металлы, используются пластины и обмотки. Они уменьшают потери, вызванные вихревыми токами, гистерезисом и высоким реактивным сопротивлением. Округ Колумбия мощность может быть использована для эффективного привода двигателя переменного тока, но обратное неверно.
Характеристики последовательного двигателя переменного тока аналогичны характеристикам последовательного двигателя постоянного тока. Это машина с переменной скоростью. Это
имеет низкие скорости для больших нагрузок и высокие скорости для легких грузов. Пусковой момент очень
Пусковой момент очень
4-2
высокий. Серийные двигатели используются для привода вентиляторов, электродрелей и других мелких приборов. Поскольку Серийный двигатель переменного тока имеет те же общие характеристики, что и серийный двигатель постоянного тока. может работать как на переменном, так и на постоянном токе. Этот двигатель переменного/постоянного тока называется универсальным двигателем. Он находит широкое применение в небольших электрических Техника. Универсальные двигатели работают с более низким КПД, чем двигатели переменного или постоянного тока. Они встроены в только маленькие размеры. Универсальные двигатели не работают от многофазного переменного тока.
Q2. Серийные двигатели обычно используется для работы с каким типом оборудования? Q3. Почему серийные двигатели иногда называют универсальными?
ВРАЩАЮЩИЕСЯ МАГНИТНЫЕ ПОЛЯ
Принцип вращающихся магнитных полей является ключом к работе большинства двигателей переменного тока.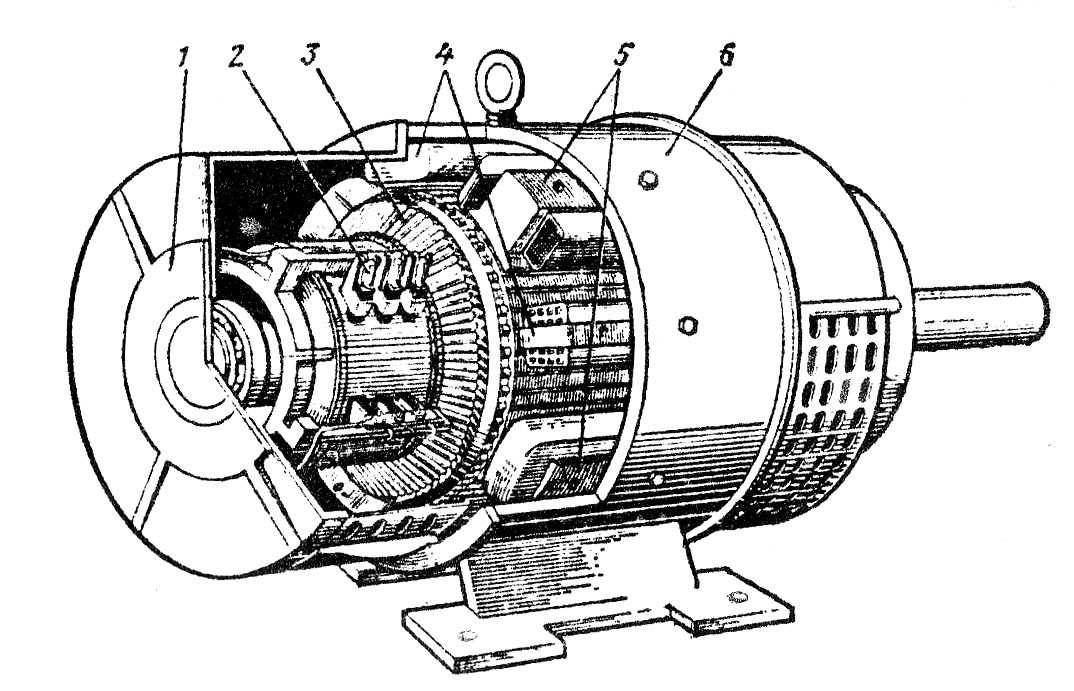 И синхронные, и
асинхронные двигатели полагаются на вращающиеся магнитные поля в их статорах, чтобы заставить их роторы вращаться.
И синхронные, и
асинхронные двигатели полагаются на вращающиеся магнитные поля в их статорах, чтобы заставить их роторы вращаться.
Идея проста. магнитное поле в статоре можно заставить электрически вращаться вокруг и вокруг. Другая магнитное поле в роторе можно заставить преследовать его, притягиваясь и отталкиваясь полем статора. Потому что ротор может свободно вращаться, он следует за вращающимся магнитным полем в статоре. Давайте посмотрим, как это делается.
Вращающиеся магнитные поля могут быть созданы в двухфазных или трехфазных машинах. Чтобы установить вращающийся магнитный поле в статоре двигателя, количество пар полюсов должно быть таким же (или кратным) количеству фаз в приложенное напряжение. При этом полюса должны быть смещены друг относительно друга на угол, равный фазовому углу между отдельные фазы приложенного напряжения.
Q4. От чего зависит количество полевых полюсов, необходимых для установить вращающееся магнитное поле в статоре многофазного двигателя?
ДВУХФАЗНЫЙ ВРАЩАЮЩИЙСЯ Магнитный ПОЛЕ
вращающееся магнитное поле, вероятно, легче всего увидеть в двухфазном статоре. Статор двухфазного индукционного
двигатель состоит из двух обмоток (или кратных двум). Они расположены под прямым углом друг к другу вокруг
статор. На упрощенном чертеже на рис. 4-2 показан двухфазный статор.
Статор двухфазного индукционного
двигатель состоит из двух обмоток (или кратных двум). Они расположены под прямым углом друг к другу вокруг
статор. На упрощенном чертеже на рис. 4-2 показан двухфазный статор.
4-3
Рис. 4-2. — Статор двухфазного двигателя.
Если напряжения, подаваемые на фазы 1-1A и 2-2A, сдвинуты по фазе на 90°, то токи, протекающие в фазы смещены друг относительно друга на 90º. Поскольку магнитные поля, создаваемые в катушках, совпадают по фазе с их соответствующие токи, магнитные поля также не совпадают по фазе на 90º друг с другом. Эти два
противофазные магнитные поля, оси катушек которых расположены под прямым углом друг к другу, складываются в каждые
мгновений во время их цикла. Они создают результирующее поле, которое вращается на один оборот за каждый цикл переменного тока.
Кому
проанализировать вращающееся магнитное поле в двухфазном статоре, см. рис. 4-3. Стрелка представляет ротор.
Для каждой точки, установленной на диаграмме напряжения, считайте, что ток течет в направлении, которое вызовет
магнитная полярность указана на каждом полюсном наконечнике. Обратите внимание, что от одной точки к другой полярности меняются.
от одного полюса к другому по часовой стрелке. Один полный цикл входного напряжения производит 360-градусный
вращение полярных полюсов. Посмотрим, как будет получен этот результат.
рис. 4-3. Стрелка представляет ротор.
Для каждой точки, установленной на диаграмме напряжения, считайте, что ток течет в направлении, которое вызовет
магнитная полярность указана на каждом полюсном наконечнике. Обратите внимание, что от одной точки к другой полярности меняются.
от одного полюса к другому по часовой стрелке. Один полный цикл входного напряжения производит 360-градусный
вращение полярных полюсов. Посмотрим, как будет получен этот результат.
4-4
Рис. 4-3. — Двухфазное вращающееся поле.
Осциллограммы на рис. 4-3 относятся к двум входным фазам, смещенным на 90º из-за того, как они были
генерируется двухфазным генератором. Сигналы нумеруются в соответствии с соответствующей фазой. Хотя нет
показано на этом рисунке, обмотки для полюсов 1-1А и 2-2А будут такими, как показано на предыдущем рисунке. В
положении 1 ток и магнитное поле в обмотке 1-1А максимальны (поскольку фазное напряжение
максимум). Ток и магнитное поле в обмотке 2-2А равны нулю (поскольку фазное напряжение равно нулю).
Результирующее магнитное поле поэтому направлено по оси 1-1А. В точке 45 градусов (позиция 2)
Результирующее магнитное поле находится посередине между обмотками 1-1А и 2-2А. Токи катушки и магнитные поля
равны по силе. В 90° (позиция 3) магнитное поле в обмотке 1-1А равно нулю. Магнитное поле в обмотке
2-2А это максимум. Теперь результирующее магнитное поле лежит вдоль оси обмотки 2-2А, как показано.
Результирующее магнитное поле повернулось по часовой стрелке на 90º, чтобы перейти из положения 1 в положение 3. Когда
двухфазные напряжения совершили один полный цикл (позиция 9), результирующее магнитное поле повернулось на
360º. Таким образом, расположив две обмотки под прямым углом друг к другу и возбудив эти обмотки напряжениями 90º
в противофазе возникает вращающееся магнитное поле.
Ток и магнитное поле в обмотке 2-2А равны нулю (поскольку фазное напряжение равно нулю).
Результирующее магнитное поле поэтому направлено по оси 1-1А. В точке 45 градусов (позиция 2)
Результирующее магнитное поле находится посередине между обмотками 1-1А и 2-2А. Токи катушки и магнитные поля
равны по силе. В 90° (позиция 3) магнитное поле в обмотке 1-1А равно нулю. Магнитное поле в обмотке
2-2А это максимум. Теперь результирующее магнитное поле лежит вдоль оси обмотки 2-2А, как показано.
Результирующее магнитное поле повернулось по часовой стрелке на 90º, чтобы перейти из положения 1 в положение 3. Когда
двухфазные напряжения совершили один полный цикл (позиция 9), результирующее магнитное поле повернулось на
360º. Таким образом, расположив две обмотки под прямым углом друг к другу и возбудив эти обмотки напряжениями 90º
в противофазе возникает вращающееся магнитное поле.
Двухфазные двигатели применяются редко, разве что в оборудовании специального назначения. Они обсуждаются здесь, чтобы помочь в
понимание вращающихся полей. Однако вы столкнетесь со многими однофазными и трехфазными двигателями.
Они обсуждаются здесь, чтобы помочь в
понимание вращающихся полей. Однако вы столкнетесь со многими однофазными и трехфазными двигателями.
Q5. Каково угловое смещение полюсов поля в статоре двухфазного двигателя?
4-5
ТРЕХФАЗНЫЕ ВРАЩАЮЩИЕСЯ ПОЛЯ
Трехфазный асинхронный двигатель также работает на принцип вращающегося магнитного поля. Следующее обсуждение показывает, как обмотки статора могут быть подключены к трехфазному входу переменного тока и имеют результирующее магнитное поле, которое вращается.
Рисунок 4-4, виды
A-C показывают отдельные обмотки для каждой фазы. Рисунок 4-4, вид D, показывает, как три фазы связаны друг с другом.
в Y-образном статоре. Точка на каждой диаграмме указывает на общую точку Y-образного соединения. Ты это видишь
отдельные фазные обмотки равномерно распределены вокруг статора. Это размещает обмотки на 120º друг от друга.
Рис. 4-4. — Статор трехфазный, Y-образный.
Трехфазное входное напряжение статора на рис. 4-4 показано на графике на рис. 4-5. использовать Правило левой руки для определения электромагнитной полярности полюсов в любой момент времени. При применении Правило для катушек на рис. 4-4, считайте, что ток течет к клеммам с положительными напряжениями, и вдали от номеров клемм для отрицательного напряжения.
4-6
Рис. 4-5. — Полярность трехфазного вращающегося поля и входные напряжения.
Результаты этого анализа показаны для точек напряжения с 1 по 7 на рис. 4-5. В точке 1,
магнитное поле в катушках 1-1А максимально с полярностью как показано. При этом отрицательные напряжения
чувствуется в обмотках 2-2А и 3-3А. Они создают более слабые магнитные поля, которые, как правило, помогают полю 1-1 А. В
точка 2 максимальное отрицательное напряжение ощущается в обмотках 3-3А. Это создает сильное магнитное поле, которое,
в свою очередь, этому способствуют более слабые поля в 1-1А и 2-2А. Анализируя каждую точку на графике напряжения, можно
видно, что результирующее магнитное поле вращается по часовой стрелке. При трехфазном напряжении
завершает один полный цикл (точка 7), магнитное поле повернулось на 360º.
В
точка 2 максимальное отрицательное напряжение ощущается в обмотках 3-3А. Это создает сильное магнитное поле, которое,
в свою очередь, этому способствуют более слабые поля в 1-1А и 2-2А. Анализируя каждую точку на графике напряжения, можно
видно, что результирующее магнитное поле вращается по часовой стрелке. При трехфазном напряжении
завершает один полный цикл (точка 7), магнитное поле повернулось на 360º.
Q6. Что главное разница между двухфазным и трехфазным статором?
ПОВЕДЕНИЕ РОТОРА ВО ВРАЩАЮЩЕМСЯ ПОЛЕ
Для объяснения движения ротора предположим, что мы можем поместить стержневой магнит в центр статора. схемы рис. 4-5. Мы установим этот магнит так, чтобы он мог свободно вращаться в этой области. Предположим также, что стержневой магнит выровнен так, что в точке 1 его южный полюс находится напротив большого N поля статора.
Вы можете видеть, что это выравнивание является естественным. В отличие от полюсов притягиваются, и два поля выровнены так, что они
привлечение. Теперь идем от точки 1 к точке 7. Как и прежде, поле статора вращается по часовой стрелке. Стержневой магнит,
свободно двигаться, будет следовать за полем статора, потому что притяжение между двумя полями
В отличие от полюсов притягиваются, и два поля выровнены так, что они
привлечение. Теперь идем от точки 1 к точке 7. Как и прежде, поле статора вращается по часовой стрелке. Стержневой магнит,
свободно двигаться, будет следовать за полем статора, потому что притяжение между двумя полями
4-7
продолжает существовать. вал, проходящий через точку поворота стержневого магнита, будет вращаться с той же скорость как вращающееся поле. Эта скорость известна как синхронная скорость. Вал представляет собой вал работающий двигатель, к которому прикреплена нагрузка.
Помните, это объяснение является чрезмерным упрощением. это
предназначен для того, чтобы показать, как вращающееся поле может вызвать механическое вращение вала. Такая схема будет работать, но
он не используется. Существуют ограничения для ротора с постоянными магнитами. Практические двигатели используют другие методы, как мы
см. в следующих пунктах.
в следующих пунктах.
СИНХРОННЫЕ ДВИГАТЕЛИ
Конструкция синхронных двигателей в основном аналогична конструкции явно выраженных двигателей. полюсный генератор. Фактически, такой генератор переменного тока может работать как двигатель переменного тока. Это похоже на рисунок на рисунке 4-6. Синхронные двигатели имеют характеристику постоянной скорости между холостым ходом и полной нагрузкой. они способны коррекции низкого коэффициента мощности индуктивной нагрузки при их эксплуатации в определенных условиях. Они есть часто используется для привода генераторов постоянного тока. Синхронные двигатели рассчитаны на мощность до тысячи лошадиных сил. Они могут быть спроектированы как однофазные или многофазные машины. Последующее обсуждение основано на трехфазная конструкция.
Рис. 4-6. — Синхронный двигатель с вращающимся полем.
Чтобы понять, как работает синхронный двигатель, предположим, что подача трехфазного переменного тока на
статор создает вращающееся магнитное поле вокруг ротора. Ротор питается постоянным током (он действует
как стержневой магнит). Сильное вращающееся магнитное поле притягивает сильное поле ротора, активируемое постоянным током. Этот
приводит к сильному вращающему усилию на валу ротора. Таким образом, ротор может вращать груз, когда он вращается в
шаг с вращающимся магнитным полем.
Ротор питается постоянным током (он действует
как стержневой магнит). Сильное вращающееся магнитное поле притягивает сильное поле ротора, активируемое постоянным током. Этот
приводит к сильному вращающему усилию на валу ротора. Таким образом, ротор может вращать груз, когда он вращается в
шаг с вращающимся магнитным полем.
Это работает таким образом после запуска. Однако один из
Недостатком синхронного двигателя является то, что его нельзя запустить из состояния покоя при подаче трехфазного переменного тока.
питание статора. Когда переменный ток подается на статор, немедленно возникает высокоскоростное вращающееся магнитное поле.
Это вращающееся поле проносится мимо полюсов ротора так быстро, что ротор не успевает запуститься.
В результате ротор отталкивается сначала в одном направлении, а затем в другом. синхронный двигатель в чистом виде
не имеет пускового момента. Он имеет крутящий момент только тогда, когда он работает на синхронной скорости.
Беличья клетка Обмотка добавляется к ротору синхронного двигателя, чтобы вызвать его запуск. Беличья клетка показана как внешняя часть ротора на рис. 4-7. Он назван так потому, что по форме напоминает вертушку. Беличья клетка. Проще говоря, обмотки представляют собой тяжелые медные стержни, замкнутые накоротко
4-8
вместе медными кольцами. низкое напряжение индуцируется в этих короткозамкнутых обмотках вращающимся трехфазное статорное поле. Из-за короткого замыкания в беличьей клетке протекает относительно большой ток. Это вызывает магнитное поле, которое взаимодействует с вращающимся полем статора. Благодаря взаимодействию, ротор начинает вращаться, следуя за полем статора; двигатель запускается. Мы снова столкнемся с беличьими клетками в других приложения, где они будут рассмотрены более подробно.
Рис. 4-7. — Самозапускающийся синхронный двигатель переменного тока.
Для запуска практического синхронного двигателя статор находится под напряжением, но подача постоянного тока на поле ротора не под напряжением. Обмотки с короткозамкнутым ротором обеспечивают скорость вращения ротора, близкую к синхронной. В этот момент постоянное поле находится под напряжением. Это синхронизирует ротор с вращающимся полем статора. Развивается полный крутящий момент, а нагрузка управляется. механическое переключающее устройство, работающее за счет центробежной силы, часто используется для подачи постоянного тока на ротор. по мере достижения синхронной скорости.
Недостатком практичного синхронного двигателя является необходимость в напряжение возбуждения ротора. Это напряжение может быть получено либо извне, либо внутри, в зависимости от конструкция мотора.
Q7. Каким требованиям отвечает синхронный двигатель?
АИНХАРНЫЕ ДВИГАТЕЛИ
Асинхронный двигатель является наиболее часто используемым типом двигателя переменного тока. Простая и надежная конструкция стоит
относительно мало в производстве. Асинхронный двигатель имеет ротор, который не подключен к внешнему источнику тока.
Напряжение. Асинхронный двигатель получил свое название из-за того, что в цепи ротора индуцируется переменное напряжение.
вращающееся магнитное поле статора. Во многом асинхронность в этом двигателе аналогична асинхронной
между первичной и вторичной обмотками трансформатора.
Простая и надежная конструкция стоит
относительно мало в производстве. Асинхронный двигатель имеет ротор, который не подключен к внешнему источнику тока.
Напряжение. Асинхронный двигатель получил свое название из-за того, что в цепи ротора индуцируется переменное напряжение.
вращающееся магнитное поле статора. Во многом асинхронность в этом двигателе аналогична асинхронной
между первичной и вторичной обмотками трансформатора.
Большие двигатели и стационарные двигатели что приводные нагрузки с довольно постоянной скоростью часто представляют собой асинхронные двигатели. Примеры можно найти в стиральных машинах, компрессоры для холодильников, настольные шлифовальные станки и настольные пилы.
Конструкция статора трехфазной
асинхронный двигатель и трехфазный синхронный двигатель практически идентичны. Однако их роторы полностью
разные (см. рис. 4-8). Индукционный ротор выполнен из многослойного цилиндра с прорезями на его поверхности.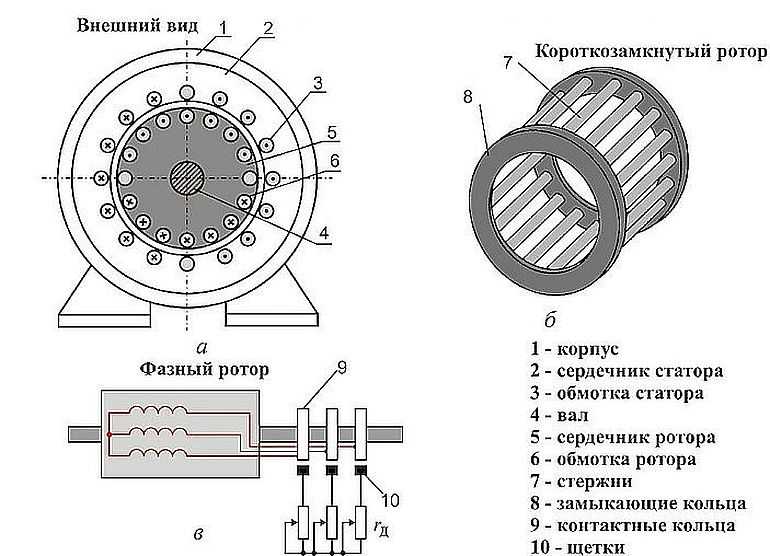 обмотки в этих пазах одного из двух типов (показаны на рис. 4-9). Наиболее распространена обмотка с короткозамкнутым ротором.
Вся эта обмотка состоит из
обмотки в этих пазах одного из двух типов (показаны на рис. 4-9). Наиболее распространена обмотка с короткозамкнутым ротором.
Вся эта обмотка состоит из
4-9
тяжелых медных стержня, соединенных на каждом конце металлическим кольцом из меди или латуни. Нет требуется изоляция между сердечником и стержнями. Это происходит из-за очень низкого напряжения, генерируемого в стержни ротора. Другой тип обмотки содержит настоящие катушки, размещенные в пазах ротора. Тогда ротор называется ротор с обмоткой.
Рис. 4-8. — Индукционный двигатель.
Рис. 4-9. — Типы роторов асинхронных двигателей переменного тока.
Независимо от типа используемого ротора, основной принцип один и тот же. Вращающееся магнитное поле
генерируемое в статоре, индуцирует магнитное поле в роторе. Два поля взаимодействуют и заставляют ротор вращаться.
4-10
| — | Материя, Энергия, и постоянного тока |
| — | Переменный ток и трансформаторы |
| — | Защита цепи, управление и измерение |
| — | Электрические проводники, электромонтажные работы, и схематическое чтение |
| — | Генераторы и двигатели |
| — | Электронное излучение, лампы и источники питания |
| — | Твердотельные устройства и блоки питания |
| — | Усилители |
| — | Схемы генерации и формирования волн |
| — | Распространение волн, линии передачи и Антенны |
| — | Принципы работы с микроволнами |
| — | Принципы модуляции |
| — | Введение в системы счисления и логические схемы |
| — | — Введение в микроэлектронику |
| — | Принципы синхронизаторов, сервоприводов и гироскопов |
| — | Знакомство с испытательным оборудованием |
| — | Принципы радиочастотной связи |
| — | Принципы радиолокации |
| — | Справочник техника, основной глоссарий |
| — | Методы испытаний и практика |
| — | Введение в цифровые компьютеры |
| — | Магнитная запись |
| — | Введение в волоконную оптику |
Примечание: Обучение электротехнике и электронике военно-морского флота
Контент серии (NEETS) является общедоступной собственностью ВМС США. | |
Производство вращающегося магнитного поля
Производство вращающегося магнитного поля в трехфазном питании очень интересно.
Когда трехфазная обмотка питается от трехфазного источника питания, создается вращающееся магнитное поле. Это поле таково, что его полюса не остаются в фиксированном положении на статоре, а продолжают перемещаться вокруг статора. По этой причине его называют вращающимся полем.
Можно показать, что величина этого вращающегося поля постоянна и равна 1,5 f м , где f м — максимальный поток, обусловленный любой фазой.
Трехфазный асинхронный двигатель состоит из трехфазной обмотки в качестве неподвижной части, называемой статором. Обмотка трехфазного статора соединяется звездой или треугольником.
Трехфазные обмотки смещены друг относительно друга на 120°. Обмотки питаются от сбалансированного трехфазного источника переменного тока.
Трехфазные токи протекают одновременно по обмоткам и смещены друг от друга на 120° эл.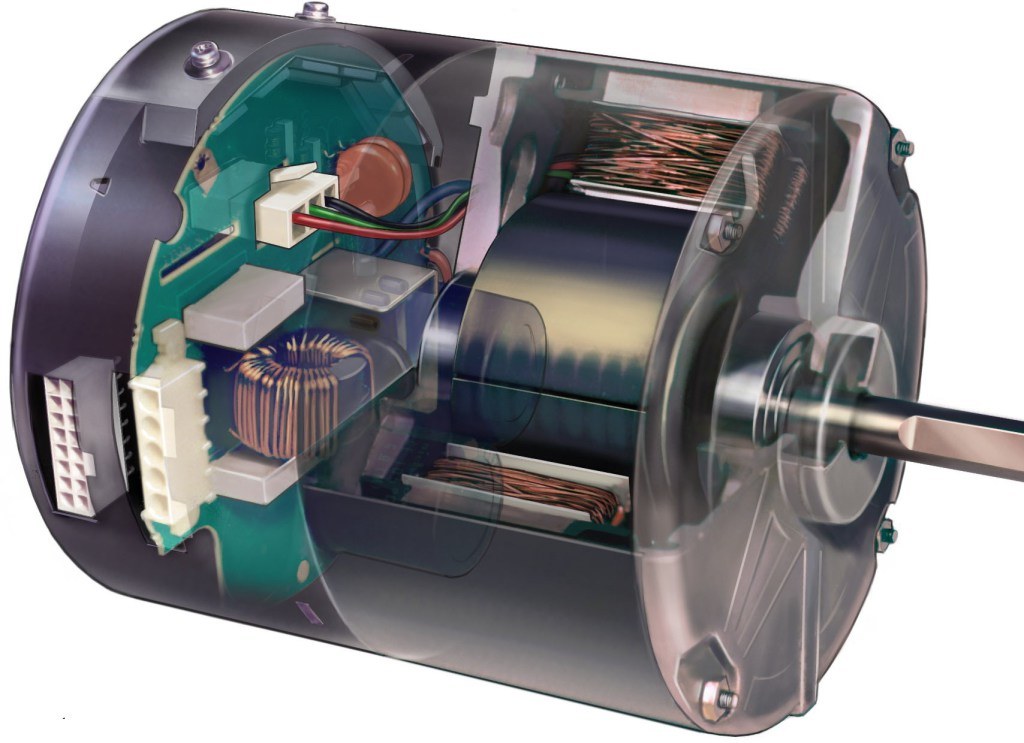 Каждый переменный фазный ток создает свой собственный поток, который является синусоидальным.
Каждый переменный фазный ток создает свой собственный поток, который является синусоидальным.
Итак, все три потока синусоидальны и отстоят друг от друга на 120°.
Если последовательность фаз обмоток R-Y-B, то математические уравнения для мгновенных значений трех потоков Φ R , Φ Y , Φ B могут быть записаны как,
Φ R = Φ m sin(ωt)
Φ Y = Φ m sin(ωt – 120)
Φ B = Φ m sin(ωt – 240)
Поскольку обмотки идентичны, а питание сбалансировано, величина каждого потока равна Φm.
Формы сигналов трех потоков и их положительные направленияСодержание
Случай 1: ωt = 0
Φ R = Φmsin(0) = 0
φ y = φmsin (0-120) = -0,866 φm
φ B = φmsin (0-240) = +0,866 φm
Гномовый.
φ r = φmsin (60) = +0,866 φm
φ y = φmsin (- 60) = -0,866 φm
φ B = φIN (180570 B = φIN (180570 B = φIN (180570 B = φIN (180570 B = φIN (180570 B = φ. случай 2
случай 3 : ωt = 120
Φ R = Φmsin(120) = = +0,866 Φm
Φ y = φmsin (0) = 0
φ B = φmsin (- 120) = -0,866 φm
Случай вращающегося магнитного поля 3Случай 4: ωt = 180
a 2 a 2 a 2 φ y = φmsin (60) = +.866 φm φ B = φmsin (- 60) = -0,866 φm 44444444444444444444444444444444 4. Φ R = Φmsin(0) = 0 Сравнивая электрическую и векторную диаграммы, мы можем найти, что поток поворачивается на полные 360 градусов при смещении потока на 180 градусов. Скорость, с которой вращается магнитное поле, называется синхронной скоростью (Ns). Что касается формы волны трех фаз, момент времени 4 представляет завершение одной четверти цикла переменного тока I x с момента времени 1. В течение этой четверти цикла поле повернулось на 90° . За один полный цикл тока I x от начала координат поле совершило один оборот. Следовательно, для 2-полюсной обмотки статора поле совершает один оборот за один цикл тока. Можно показать, что в 4-полюсной обмотке статора вращающееся поле совершает один оборот за два цикла тока. Обычно для полюсов P вращающееся поле совершает один оборот за P/2 циклов тока. $\these$ Циклы текущих $=\frac{P}{2} \times$ оборотов поля. или Циклы тока в секунду $=\frac{P}{2} \times$ оборотов поля в секунду Так как обороты в секунду равны оборотам в минуту (Ns ) деленному на 60 и числу циклов в секунду — частота f, $f=\frac{P}{2} \times \frac{N_{S}}{60}=\frac{N_{S} P}{120}$ $\therefore \quad N_{S}=\frac{120 f}{P}$ Скорость вращающегося магнитного поля равна скорости генератора переменного тока, питающего двигатель, если два имеют одинаковое количество полюсов. Последовательность фаз трехфазного напряжения, приложенного к обмотке статора на первом рисунке, R-Y-B. Если изменить эту последовательность на R-B-Y, то будет видно, что направление вращения поля меняется на противоположное, т. е. поле вращается против часовой стрелки, а не по часовой стрелке. Однако число полюсов и скорость вращения магнитного поля остаются неизменными. Таким образом, необходимо только изменить последовательность фаз, чтобы изменить направление вращения магнитного поля. Для трехфазного питания это можно сделать, поменяв местами любые две из трех линий. Как мы увидим, ротор трехфазного асинхронного двигателя вращается в том же направлении, что и вращающееся магнитное поле. Таким образом, направление вращения трехфазного асинхронного двигателя можно изменить, поменяв местами любые две из трех линий питания двигателя.. Ωt = 180
. 180) = 0
Вращающаяся величина магнитного поля под разными угламиВращающаяся величина магнитного поля
Φ Y = Φmsin(0 – 120) = -0,866 Φm
φ B = φmsin (0 — 240) = +0,866 φm Случай 2: ωt = 60
φ 2 φ1,80,871. Применение
Применение
φ φ571. Примен = Φmsin(- 60) = -0.866 Φm
Φ B = Φmsin(- 180) = 0 Case 3 : ωt = 120
Φ R = Φmsin(120) = +0,866 Φm
Φ Y = Φmsin(0) = 0
Φ B = Φmsin(- 120) = -0,866 Φm Случай 4: ωt = 180
φ r = φmsin (180) = 0
φ Y = φmsin (60) = +.86669
7 a = φmsin (60) = +.86669
7 a =. ) = -0,866 Φm Скорость вращающегося магнитного поля

 Следовательно, говорят, что магнитный поток вращается с синхронной скоростью.
Следовательно, говорят, что магнитный поток вращается с синхронной скоростью. Направление вращающегося магнитного поля
