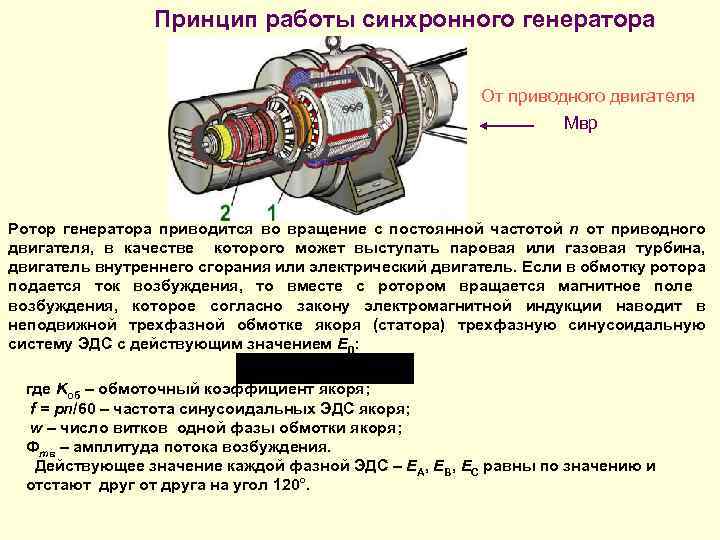
Принцип работы электродвигателя — HiSoUR История культуры
Электродвигатель представляет собой электромеханический преобразователь (электрическая машина), который преобразует электрическую энергию в механическую. В обычных электродвигателях генерируются магнитные поля с токопроводящими проводниками, взаимные силы притяжения и отталкивания которых приводятся в движение. Таким образом, электродвигатель является аналогом очень аналогичного сконструированного генератора, который преобразует мощность двигателя в электрическую. Электродвигатели обычно генерируют вращающиеся движения, но они также могут использоваться для создания трансляционных движений (линейный привод). Электродвигатели используются для управления многими оборудованием, машинами и транспортными средствами.
Принцип действия
Электродвигатели — это устройства, которые преобразуют электрическую энергию в механическую энергию. Средствами этого преобразования энергии в электродвигателях является магнитное поле. Существуют различные типы электродвигателей, и каждый тип имеет разные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, которые вызывают силу или крутящий момент двигателя.
Существуют различные типы электродвигателей, и каждый тип имеет разные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, которые вызывают силу или крутящий момент двигателя.
Основной принцип заключается в том, что описание того, как сила вызвано взаимодействием точечного электрического заряда q в электрическом и магнитном полях, является законом Лоренца:
где:
q: пунктуальный электрический заряд
E: Электрическое поле
v: скорость частиц
B: плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
Сила в этом случае определяется только зарядом q и электрическим полем E. Это кулоновская сила действует вдоль проводника, создающего электрический поток, например, в катушках статора индукционных машин или в роторе двигателей постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью нагрузки v. Эта сила перпендикулярна магнитному полю и направлению скорости нагрузки. Обычно в движении имеется много нагрузок, поэтому удобно переписать выражение в терминах плотности заряда Fv (сила в единице объема):
Обычно в движении имеется много нагрузок, поэтому удобно переписать выражение в терминах плотности заряда Fv (сила в единице объема):
К продукту он известен как плотность тока J (ампер на квадратный метр):
Тогда полученное выражение описывает силу, возникающую при взаимодействии тока с магнитным полем:
Это основной принцип, объясняющий, как возникают силы в электромеханических системах, таких как электродвигатели. Однако полное описание для каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель — это по существу любой электродвигатель, который был «разворачиван», так что вместо создания крутящего момента (вращения) он создает прямолинейную силу вдоль своей длины.
Линейные двигатели чаще всего являются асинхронными двигателями или шаговыми двигателями. Линейные двигатели обычно встречаются во многих роликовых подстаканниках, где быстрое движение безмоторного вагона контролируется рельсом.
электромагнетизм
Сила и момент
Основная цель подавляющего большинства мировых электродвигателей состоит в том, чтобы электромагнитно индуцировать относительное перемещение в воздушном зазоре между статором и ротором для получения полезного крутящего момента или линейной силы.
Согласно закону силы Лоренца сила обмоточного проводника может быть задана просто:
или в более общем плане, для обработки проводников с любой геометрией:
Наиболее общие подходы к вычислению сил в двигателях используют тензоры.
Мощность
Где rpm — скорость вала, а T — момент, механическая мощность двигателя Pem определяется,
в британских единицах с Т, выраженным в фунтах,
(лошадиная сила), и,
в единицах СИ с угловой скоростью вала, выраженной в радианах в секунду, и Т, выраженной в Ньютонометрах,
(Вт).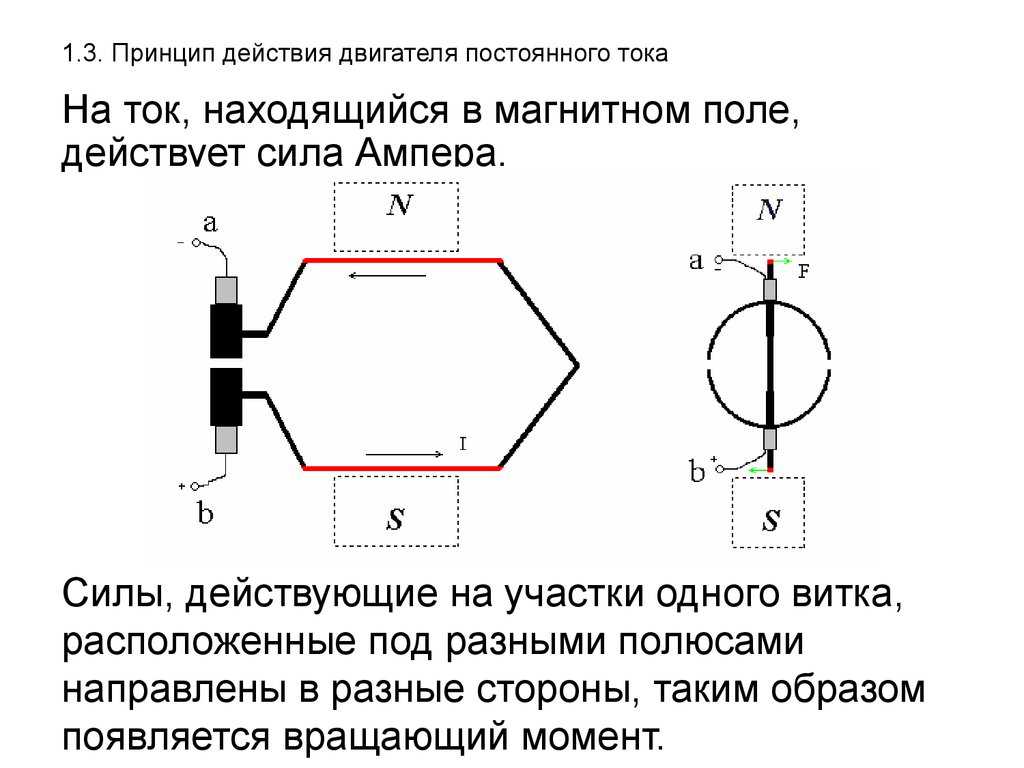
Для линейного двигателя с силой F, выраженной в ньютонах и скоростью v, выраженной в метрах в секунду,
(Вт).
В асинхронном или асинхронном двигателе соотношение между скоростью двигателя и мощностью воздушного зазора, пренебрегая скин-эффектом, определяется следующим:
Rr — сопротивление ротора
I r 2 — квадрат тока, индуцированного в роторе
s — проскальзывание двигателя; т.е. разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Назад emf
Так как обмотки якоря постоянного тока или универсального двигателя движутся через магнитное поле, они имеют индуцированное в них напряжение. Это напряжение имеет тенденцию противостоять напряжению питания двигателя и поэтому называется «назад электродвижущей силой (ЭДС)». Напряжение пропорционально скорости движения двигателя.Задняя ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны быть равны напряжению на щетках.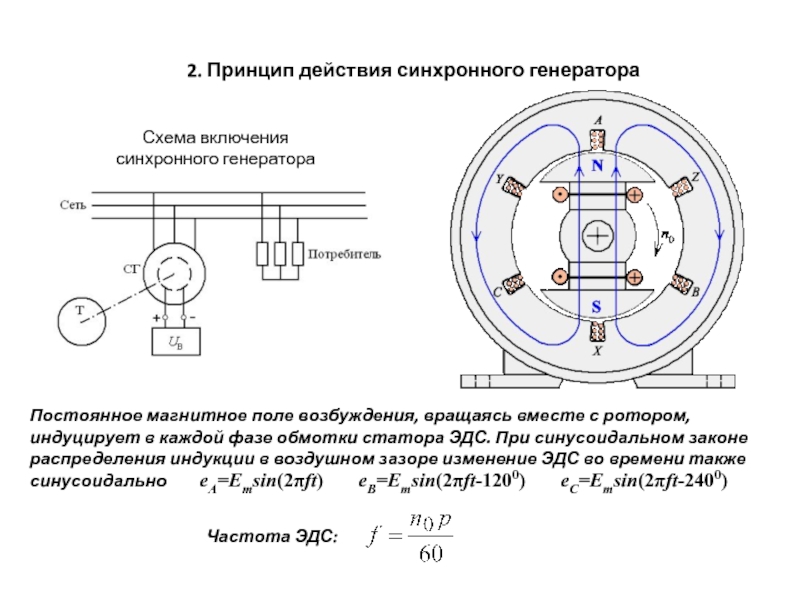
В компьютерах с переменным током иногда полезно учитывать источник обратной волны emf в машине; в качестве примера это вызывает особую озабоченность по поводу тесного регулирования скорости асинхронных двигателей на VFD.
потери
Потери двигателя связаны главным образом с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также возникают аэродинамические потери, особенно там, где присутствуют охлаждающие вентиляторы.
Потери также возникают при коммутации, искровых механических коммутаторах и электронных коммутаторах, а также рассеивают тепло.
КПД
Для расчета эффективности двигателя механическая выходная мощность делится на электрическую входную мощность:
,
где является эффективность преобразования энергии, электрическая входная мощность, и механическая выходная мощность:
где это входное напряжение, входной ток, T — выходной крутящий момент, и — выходная угловая скорость. Аналитически можно получить точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента.
Аналитически можно получить точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента.
Различные регулирующие органы во многих странах внедрили и внедрили законодательство, поощряющее производство и использование электродвигателей с более высокой эффективностью.
Коэффициент добротности
Эрик Лайтвейт предложил метрику, чтобы определить «доброту» электродвигателя:
Куда:
коэффициент добротности (коэффициенты выше 1, вероятно, будут эффективными)
— площади поперечного сечения магнитной и электрической цепи
представляют собой длины магнитных и электрических цепей
является проницаемость сердечника
— это угловая частота, с которой двигатель
Из этого он показал, что наиболее эффективные двигатели, вероятно, будут иметь относительно большие магнитные полюса. Однако это уравнение относится только к моделям без ПМ.
Параметры производительности
Момент затяжки моторов
Все электромагнитные двигатели, которые включают в себя упомянутые здесь типы, вызывают крутящий момент от векторного произведения взаимодействующих полей.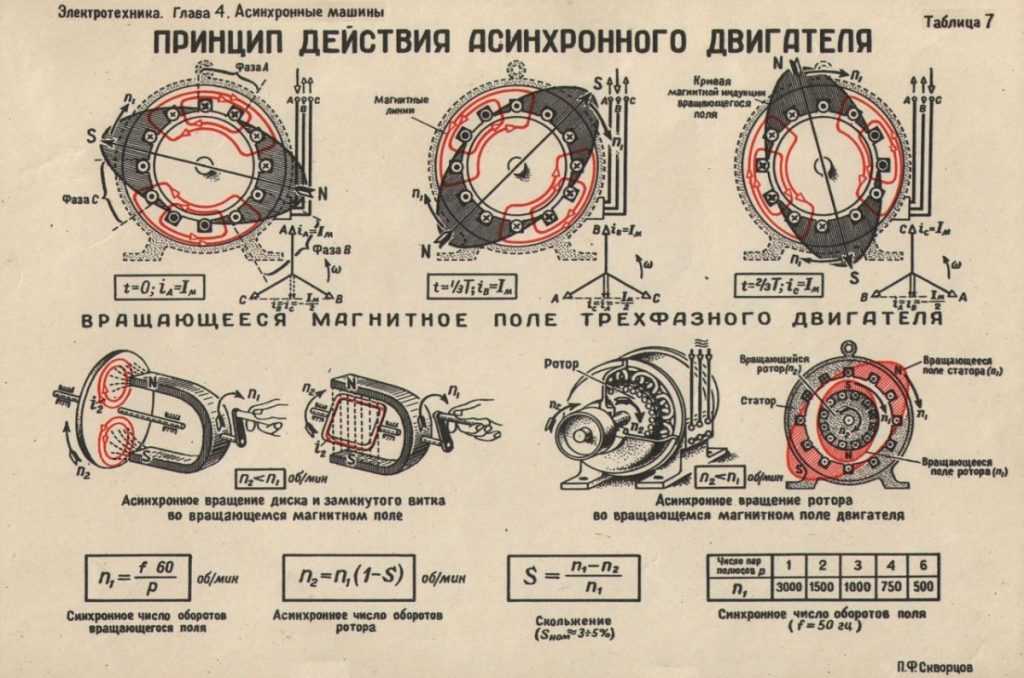
Как только это будет сделано, цифра, связывающая ток с крутящим моментом, может использоваться как полезный параметр для выбора двигателя. Максимальный крутящий момент для двигателя будет зависеть от максимального тока, хотя это, как правило, будет использоваться только до тех пор, пока термические соображения не будут иметь приоритет.
При оптимальном проектировании в пределах заданного ограничения насыщения ядра и для заданного активного тока (т. Е. Крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности потока воздушного зазора все категории электродвигателей или генераторы будут демонстрировать практически такой же максимальный непрерывный крутящий момент вала (т. е. рабочий крутящий момент) в заданной области воздушного зазора с обмотками и глубиной заднего железа, которая определяет физические размеры электромагнитного сердечника. В некоторых приложениях требуется крутящий момент за максимальный рабочий крутящий момент, такой как короткие всплески крутящего момента для ускорения электромобиля от остановки. Всегда ограниченные насыщением магнитного сердечника или безопасным повышением температуры и напряжением, способность к крутящим моментам за пределы максимального рабочего момента значительно отличается между категориями электродвигателей или генераторов.
Е. Синхронной скорости) и плотности потока воздушного зазора все категории электродвигателей или генераторы будут демонстрировать практически такой же максимальный непрерывный крутящий момент вала (т. е. рабочий крутящий момент) в заданной области воздушного зазора с обмотками и глубиной заднего железа, которая определяет физические размеры электромагнитного сердечника. В некоторых приложениях требуется крутящий момент за максимальный рабочий крутящий момент, такой как короткие всплески крутящего момента для ускорения электромобиля от остановки. Всегда ограниченные насыщением магнитного сердечника или безопасным повышением температуры и напряжением, способность к крутящим моментам за пределы максимального рабочего момента значительно отличается между категориями электродвигателей или генераторов.
Емкость для всплесков крутящего момента не следует путать с возможностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределы заданной частоты возбуждения.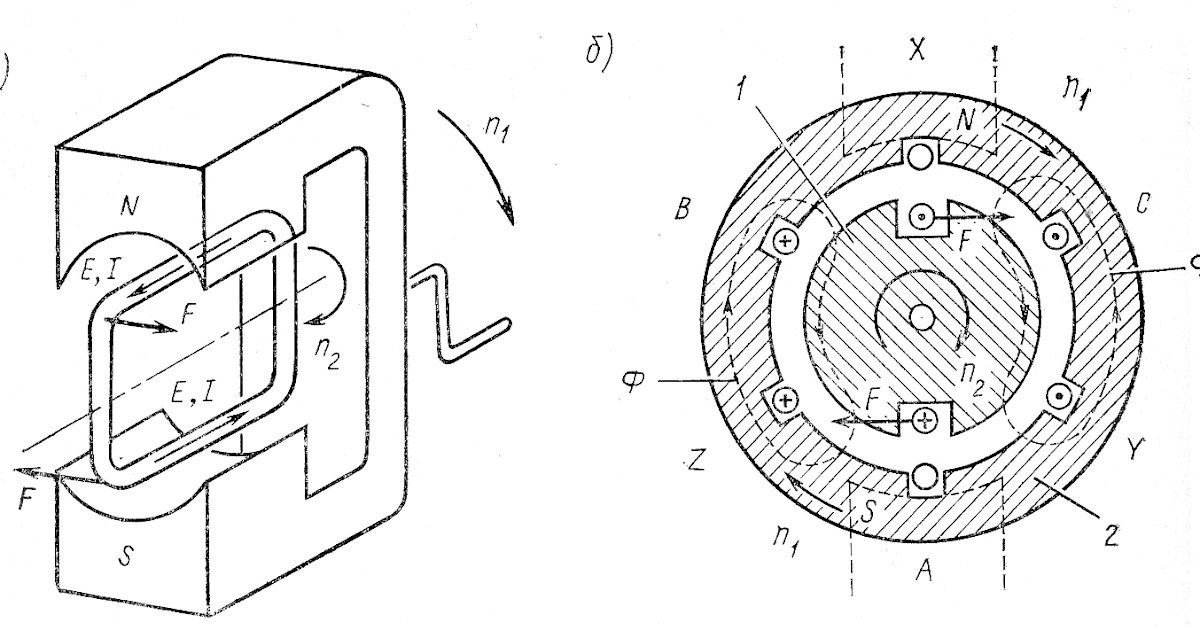 Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с регулируемыми по току полям и, следовательно, не может быть достигнуто с помощью двигателей с постоянными магнитами.
Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с регулируемыми по току полям и, следовательно, не может быть достигнуто с помощью двигателей с постоянными магнитами.
Электрические машины без топологии трансформаторной схемы, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента выше максимального расчетного момента без насыщения магнитного сердечника и любого увеличения тока как бесполезного. Кроме того, блок ПМСМ с постоянными магнитами может быть поврежден непоправимо, если попытки всплесков крутящего момента превышают максимальный крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как индукционные машины, индукционные двухкомпонентные электрические машины, а также индукционные или синхронные машины с двунаправленным раневым ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, поскольку активный ток, индуцированный ЭДС, на любом стороны трансформатора противостоят друг другу и, таким образом, не влияют на плотность магнитного потока магнитного сердечника, связанного с трансформатором, что в противном случае привело бы к насыщению ядра.
Электрические машины, которые полагаются на индукционные или асинхронные принципы, замыкают один порт схемы трансформатора, и в результате реактивный импеданс трансформаторной цепи становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (то есть реального) тока. Тем не менее реализуются всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент.
Синхронная двухсторонняя машина (BWRSDF) с бесколлекторным раневым ротором является единственной электрической машиной с истинно двухполярной топологией трансформаторной схемы (т.е. оба порта независимо возбуждены без короткого замыкания). Известно, что топология схемы с двумя портированными трансформаторами нестабильна и требует многофазного узла щетки скольжения для распространения ограниченной мощности на комплект обмотки ротора. Если бы имелись прецизионные средства для мгновенного регулирования угла крутящего момента и скольжения для синхронной работы во время движения или генерации при одновременном обеспечении бесщеточной мощности на намотке ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления схемы трансформатора и значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины. Рассчитаны крутящие моменты, превышающие восьмикратный рабочий крутящий момент.
Рассчитаны крутящие моменты, превышающие восьмикратный рабочий крутящий момент.
Плотность непрерывного крутящего момента
Постоянная плотность крутящего момента обычных электрических машин определяется размером зоны воздушного зазора и глубиной заднего железа, которые определяются степенью мощности набора обмоток якоря, скоростью машины и достижимыми характеристиками воздушно- плотность потока зазоров до насыщения ядра. Несмотря на высокую коэрцитивность постоянных магнитов неодима или самария-кобальта, постоянная плотность крутящего момента практически одинакова среди электрических машин с оптимально разработанными намотками арматуры. Непрерывная плотность крутящего момента относится к способу охлаждения и допустимого периода эксплуатации перед разрушением при перегреве обмоток или повреждении постоянным магнитом.
Другие источники утверждают, что различные топологии e-machine имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм / кг) |
|---|---|
| SPM — бесщеточный переменного тока, токовая проводимость 180 ° | 1,0 |
| SPM — бесщеточный переменного тока, токовая проводимость 120 ° | 0. 9-1.15 9-1.15 |
| IM, асинхронная машина | 0,7-1,0 |
| IPM, внутренняя машина с постоянными магнитами | 0,6-0,8 |
| VRM, машина с удвоенным показателем сопротивления | 0,7-1,0 |
где — удельная плотность крутящего момента нормализована до 1,0 для SPM — бесщеточный переменного тока, токовая проводимость 180 °, SPM — машина для поверхностного постоянного магнита.
Плотность крутящего момента примерно в четыре раза больше для электродвигателей, которые охлаждаются жидкостью, по сравнению с воздушными охлаждением.
Источник сравнения постоянного тока (DC), асинхронных двигателей (IM), синхронных двигателей с постоянными магнитами (PMSM) и переключаемых двигателей с сопротивлением (SRM) показал:
| Характеристика | Округ Колумбия | Я | PMSM | SRM |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Удельная мощность | 3 | 4 | 5 | 3,5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами до 1 МВт имеют значительно более высокую плотность крутящего момента, чем индукционные машины.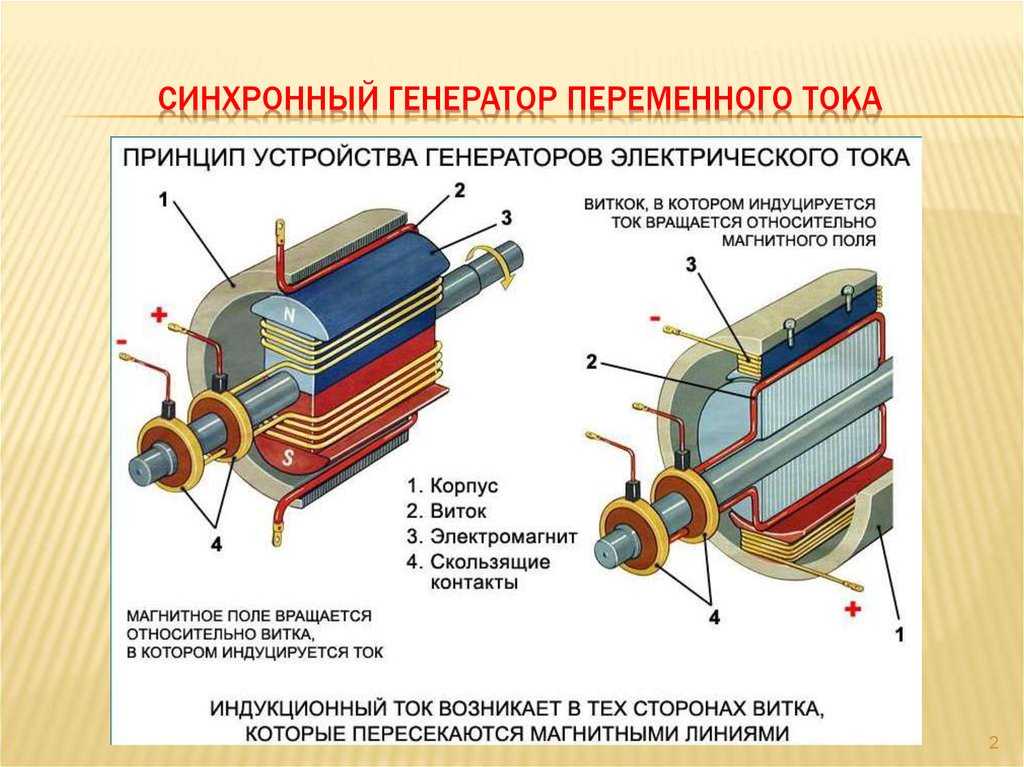
Непрерывная плотность мощности
Непрерывная плотность мощности определяется продуктом непрерывной плотности крутящего момента и постоянным диапазоном крутящего момента электрической машины.
Специальные магнитные двигатели
ротационный
Безрулевой или бесколлекторный роторный двигатель
Ничто в принципе ни одного из двигателей, описанных выше, не требует, чтобы железные (стальные) части ротора фактически вращались. Если мягкий магнитный материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Воспользовавшись этим фактом, используется бесконтактный или безредукторный двигатель постоянного тока, специализированный вариант постоянного двигателя постоянного тока. Оптимизированные для быстрого ускорения, эти двигатели имеют ротор, который построен без какого-либо железного сердечника. Ротор может иметь форму намоточного цилиндра или самонесущую конструкцию, содержащую только магнитную проволоку и связующий материал. Ротор может помещаться внутри магнитов статора; магнитно-мягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Вторая компоновка имеет корзину намотки ротора, окружающую магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
Ротор может помещаться внутри магнитов статора; магнитно-мягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Вторая компоновка имеет корзину намотки ротора, окружающую магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
Поскольку ротор намного легче по массе, чем обычный ротор, образованный из медных обмоток на стальных ламинатах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени в течение одного мс. Это особенно верно, если на обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, чтобы действовать как теплоотвод, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для бесконтактных двигателей постоянного тока. Современное программное обеспечение, такое как Motor-CAD, может помочь увеличить тепловой КПД двигателей, хотя и находится на стадии проектирования.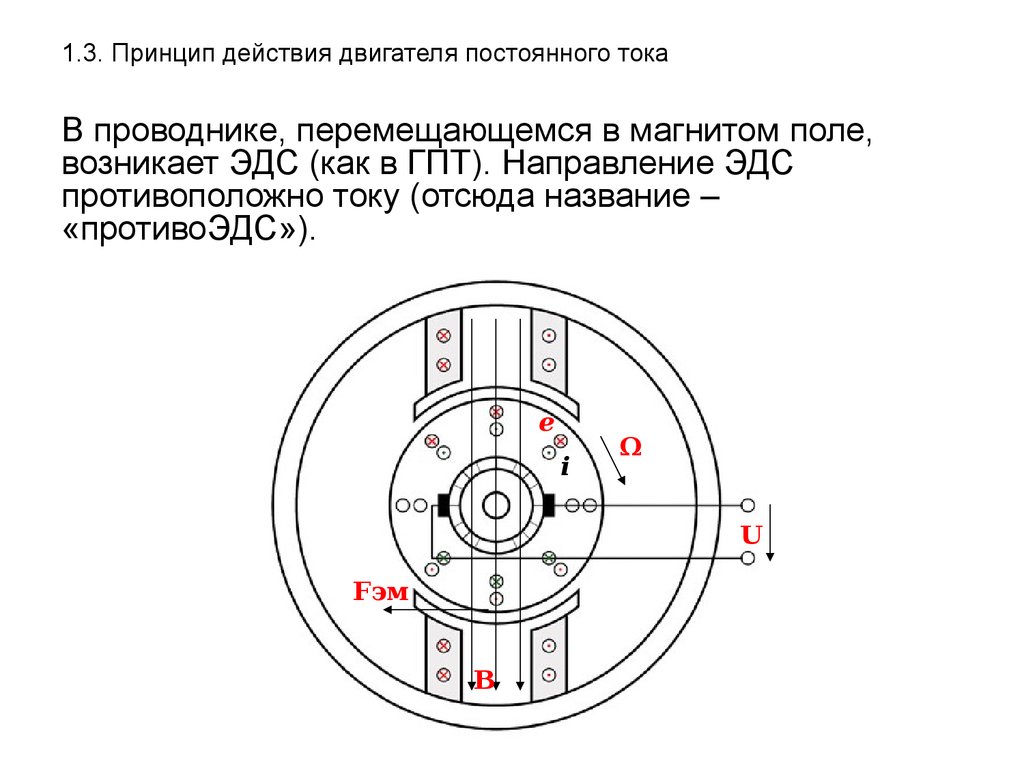
Среди этих типов — типы дисков-роторов, более подробно описанные в следующем разделе.
Вибрирующий сигнал сотовых телефонов иногда генерируется крошечными цилиндрическими типами полей с постоянными магнитами, но существуют также дискообразные типы, которые имеют тонкий многополярный магнит на диске, и преднамеренно неуравновешенную формованную пластиковую роторную структуру с двумя связанными бесколлекторными катушками. Металлические щетки и плоский коммутатор переключаются на катушки ротора.
Связанные приводы с ограниченным ходом не имеют сердечника и связанной катушки, размещенной между полюсами тонких постоянных магнитов с высоким потоком. Это быстрые позиционеры для жестких дисков (жестких дисков). Хотя современный дизайн значительно отличается от современного громкоговорителя, он все еще свободно (и неправильно) называется структурой «звуковой катушки», поскольку некоторые более ранние жесткие диски с дисковым накопителем перемещаются по прямым линиям и имеют структуру привода, громкоговорителя.
Блин или осевой роторный двигатель
Печатный якорь или двигатель блинчика имеют обмотки в виде диска, работающего между массивами магнитов с высоким потоком. Магниты расположены в окружности, обращенной к ротору, с промежутком между ними, чтобы образовать осевой воздушный зазор. Эта конструкция широко известна как двигатель блинчика из-за ее плоского профиля. У технологии было много фирменных наименований с момента ее создания, например ServoDisc.
Печатная арматура (первоначально сформированная на печатной плате) в печатном двигателе якоря выполнена из перфорированных медных листов, которые ламинируются вместе с использованием передовых композитов для образования тонкого жесткого диска.Печатная арматура имеет уникальную конструкцию в мире мостового мотора, поскольку она не имеет отдельного кольцевого коммутатора. Щетки запускаются непосредственно на поверхности якоря, что делает весь дизайн очень компактным.
Альтернативным методом изготовления является использование намотанной медной проволоки, уложенной плоской с центральным обычным коммутатором, в форме цветка и лепестка.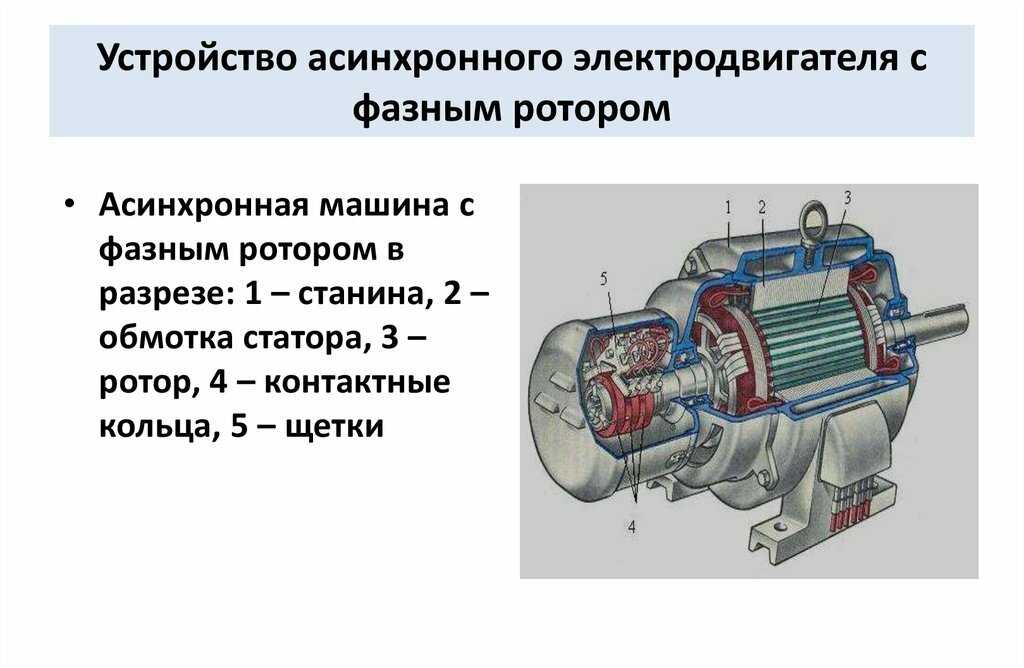 Обмотки обычно стабилизируются с помощью электрических систем эпоксидной заливки. Это наполненные эпоксиды, которые имеют умеренную, смешанную вязкость и длительное время гелеобразования. Они выделяются низкой усадкой и низкой экзотермией и обычно UL 1446 признаются в качестве заливающего компаунда, изолированного по 180 ° C, класса H.
Обмотки обычно стабилизируются с помощью электрических систем эпоксидной заливки. Это наполненные эпоксиды, которые имеют умеренную, смешанную вязкость и длительное время гелеобразования. Они выделяются низкой усадкой и низкой экзотермией и обычно UL 1446 признаются в качестве заливающего компаунда, изолированного по 180 ° C, класса H.
Уникальным преимуществом бесщеточных двигателей постоянного тока является отсутствие зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами). Паразитные вихревые токи не могут образовываться в роторе, поскольку он абсолютно невозможен, хотя железные роторы ламинируются. Это может значительно повысить эффективность, но контроллеры с переменной скоростью должны использовать более высокую скорость переключения (& gt; 40 кГц) или постоянный ток из-за пониженной электромагнитной индукции.
Эти двигатели были первоначально изобретены для привода ведущих магнитных ленточных накопителей, где минимальное время для достижения рабочей скорости и минимальной остановки было критическим. Масляные моторы широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Благодаря разнообразию доступных конструкций технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Масляные моторы широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Благодаря разнообразию доступных конструкций технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) — использовать один статор, зажатый между двумя роторами. Одна такая конструкция обеспечивала максимальную мощность 15 кВт / кг, устойчивую мощность около 7,5 кВт / кг. Этот беспилотный двигатель с осевым потоком имеет более короткий путь потока, удерживая магниты дальше от оси. Конструкция позволяет иметь нулевой обмотки; 100 процентов обмоток активны. Это усиливается благодаря использованию медной проволоки прямоугольного сечения. Двигатели могут быть сложены для параллельной работы.Нестабильность сводится к минимуму за счет того, что два диска ротора накладывают равные и противоположные силы на диск статора. Роторы соединены непосредственно друг с другом через кольцо вала, отменяя магнитные силы.
Двигатели Magnax имеют диаметр от 15 до 5,4 метра (5,9 дюйма на 17 футов 8,6 дюйма).
Серводвигатель
Сервомотор — это двигатель, который часто продается как полный модуль, который используется в системе управления с обратной связью по положению или скорости.Сервомоторы используются в таких применениях, как станки, пленочные плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизме, должны иметь хорошо документированные характеристики для скорости, крутящего момента и мощности. Кривая скорости и крутящего момента очень важна и имеет высокое соотношение для серводвигателя. Также важны динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность петли сервомеханизма. Большие, мощные, но медленно реагирующие серво-петли могут использовать обычные двигатели переменного или постоянного тока и системы привода с обратной связью по положению или скорости на двигателе. По мере увеличения требований к динамическому реагированию используются более специализированные конструкции двигателей, такие как бесконтактные двигатели.Превосходные характеристики мощности и ускорения электродвигателей переменного тока по сравнению с двигателями постоянного тока имеют тенденцию поддерживать синхронные приводы с постоянным магнитом, BLDC, индукционные и SRM-приводы.
По мере увеличения требований к динамическому реагированию используются более специализированные конструкции двигателей, такие как бесконтактные двигатели.Превосходные характеристики мощности и ускорения электродвигателей переменного тока по сравнению с двигателями постоянного тока имеют тенденцию поддерживать синхронные приводы с постоянным магнитом, BLDC, индукционные и SRM-приводы.
Сервосистема отличается от некоторых применений шагового двигателя тем, что обратная связь по положению постоянно, пока двигатель работает. Шаговая система по своей сути работает с разомкнутым контуром — полагаясь на двигатель, чтобы не «пропустить шаги» для краткосрочной точности — с любой обратной связью, такой как «домашний» переключатель или датчик положения, являющийся внешним по отношению к двигательной системе. Например, при запуске типичного компьютерного принтера с точечной матрицей его контроллер превращает привод шагового двигателя печатающей головки в его левый предел, где датчик положения определяет исходное положение и останавливается.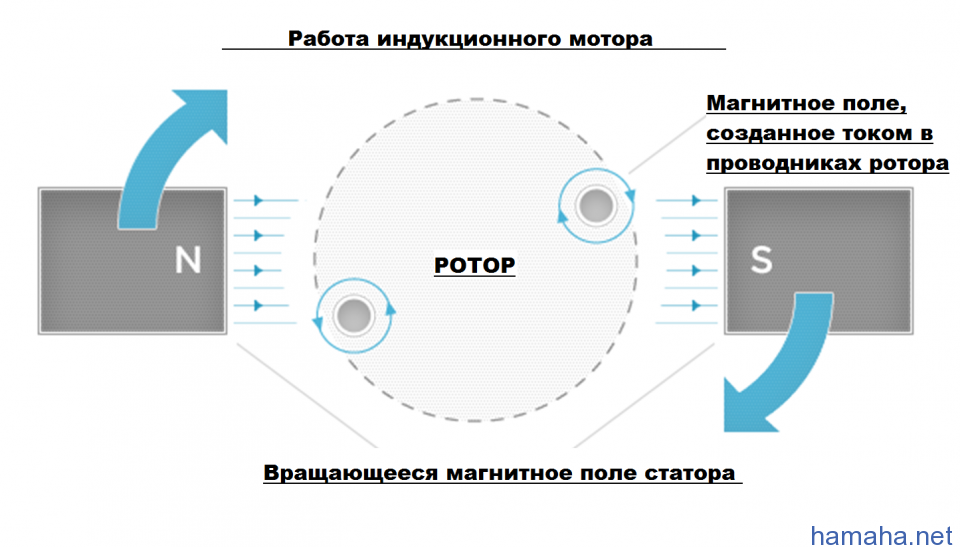 Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговые двигатели являются часто используемым двигателем, когда требуются точные вращения. В шаговом двигателе внутренний ротор, содержащий постоянные магниты или магнитно-мягкий ротор с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронным способом. Шаговый двигатель можно также рассматривать как крест между электродвигателем постоянного тока и ротационным соленоидом. Когда каждая катушка включается поочередно, ротор выравнивается с магнитным полем, создаваемым обмоткой возбужденного поля. В отличие от синхронного двигателя, при его применении шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — начинается, а затем быстро останавливается снова — от одного положения к другому, когда обмотки возбуждения возбуждаются и обесточиваются последовательно. В зависимости от последовательности ротор может поворачиваться вперед или назад, и он может в любое время изменять направление, останавливаться, ускоряться или замедляться.
Простые драйверы шагового двигателя полностью активируют или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому колесу» к ограниченному числу положений;более сложные драйверы могут пропорционально управлять мощностью обмоток поля, позволяя роторам располагаться между точками зубчатого колеса и тем самым вращаться чрезвычайно плавно. Этот режим работы часто называют микрошагом. Управляемые компьютером шаговые двигатели являются одной из самых универсальных форм позиционирующих систем, особенно в части цифровой сервоуправляемой системы.
Шаговые двигатели можно легко поворачивать под определенным углом дискретными шагами, и, следовательно, шаговые двигатели используются для позиционирования головки чтения / записи в дисководах гибких дисков. Они использовались с той же целью в компьютерных дисках в эпоху до гигабайта, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи на жестком диске. По мере увеличения плотности дисков ограничения скорости и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными, поэтому новые жесткие диски используют системы с головным приводом с голосовой катушкой. (Термин «звуковая катушка» в этой связи является историческим, он относится к структуре в типичном (коническом) громкоговорителе. Эта структура использовалась некоторое время для размещения головок. Современные приводы имеют поворотную катушку, катушки качания назад и вперед, что-то вроде лопасти вращающегося вентилятора. Тем не менее, как звуковая катушка, современные проводники катушки привода (магнитный провод) движутся перпендикулярно силовым линиям магнитного поля.)
По мере увеличения плотности дисков ограничения скорости и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными, поэтому новые жесткие диски используют системы с головным приводом с голосовой катушкой. (Термин «звуковая катушка» в этой связи является историческим, он относится к структуре в типичном (коническом) громкоговорителе. Эта структура использовалась некоторое время для размещения головок. Современные приводы имеют поворотную катушку, катушки качания назад и вперед, что-то вроде лопасти вращающегося вентилятора. Тем не менее, как звуковая катушка, современные проводники катушки привода (магнитный провод) движутся перпендикулярно силовым линиям магнитного поля.)
Шаговые двигатели использовались и по-прежнему часто используются в компьютерных принтерах, оптических сканерах и цифровых фотокопировальных устройствах для перемещения оптического сканирующего элемента, каретки печатающей головки (точечной матрицы и струйных принтеров) и валиков или подающих роликов. Аналогично, многие компьютерные плоттеры (которые с начала 1990-х годов были заменены крупноформатными струйными и лазерными принтерами) использовали вращающиеся шаговые двигатели для движения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с замкнутым контуром.
Аналогично, многие компьютерные плоттеры (которые с начала 1990-х годов были заменены крупноформатными струйными и лазерными принтерами) использовали вращающиеся шаговые двигатели для движения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с замкнутым контуром.
Так называемые кварцевые аналоговые наручные часы содержат наименьшие обычные шаговые двигатели; они имеют одну катушку, набирают очень мало энергии и имеют постоянный магнитный ротор. Такой же двигатель работает от кварцевых часов с батарейным питанием. Некоторые из этих часов, например, хронографы, содержат более одного шагового двигателя.
Тесно связанные с проектированием трехфазные синхронные двигатели переменного тока, шаговые двигатели и SRM классифицируются как тип двигателя с переменным сопротивлением. Шаговые двигатели были и остаются часто используемыми в компьютерных принтерах, оптических сканерах и компьютерах с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резцы и токарные станки с ЧПУ.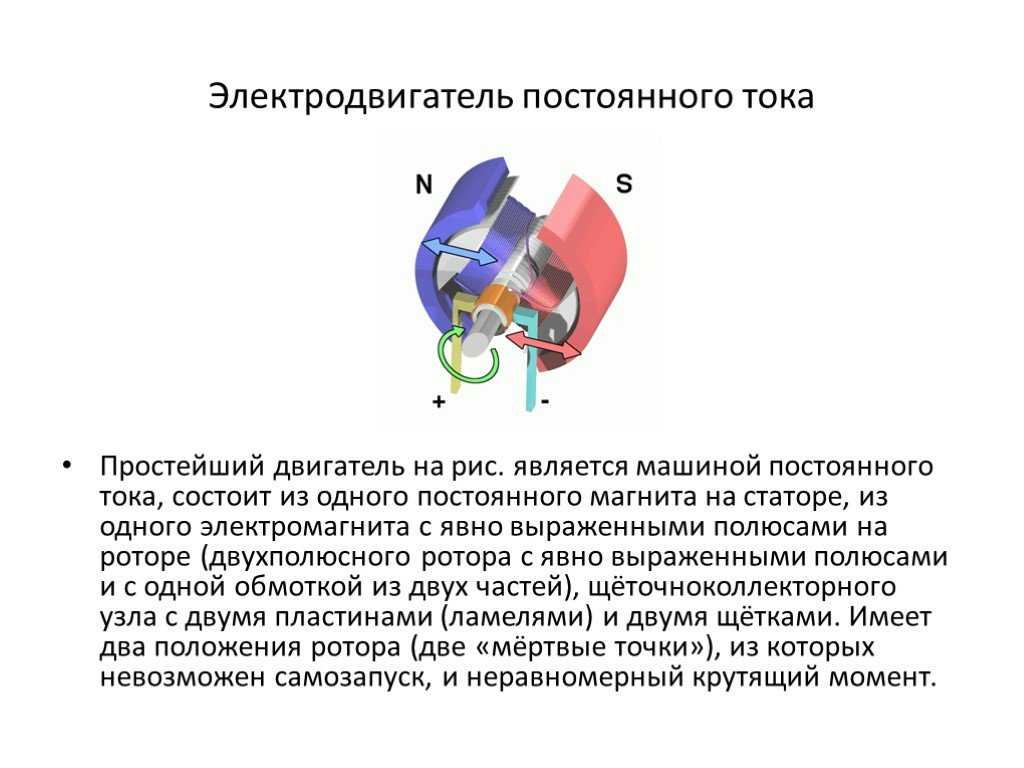
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда.Обычно электростатические двигатели сочетаются с обычными моторами на катушках.Обычно они требуют высоковольтного источника питания, хотя очень маленькие двигатели используют более низкие напряжения. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют большого тока при низких напряжениях. В 1750-е годы первые электростатические двигатели были разработаны Бенджамином Франклином и Эндрю Гордоном. Сегодня электростатический двигатель часто используется в микроэлектромеханических системах (МЭМС), где их приводные напряжения составляют менее 100 вольт, а движущиеся заряженные пластины намного легче изготавливать, чем катушки и железные сердечники. Кроме того, молекулярный механизм, который управляет живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезомотор — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля. Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для того, чтобы сделать ряд растяжек и удерживание положения, подобно тому, как движется гусеница.
Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для того, чтобы сделать ряд растяжек и удерживание положения, подобно тому, как движется гусеница.
В двигательной силовой установке с электрическим приводом используется технология электродвигателей для запуска космических аппаратов в космическом пространстве, причем большинство систем основано на электрическом питании пропеллента на высокой скорости, причем некоторые системы основаны на принципах электродинамической привязки движений к магнитосфере.
Принцип работы электродвигателей — MirMarine
Источник статьи Книга «Электродвигатели» — результат совместной работы специалистов GRUNDFOS. (www.grundfos.com). В ней подробно рассмотрены основные элементы электродвигателя, принципы его работы, стандарты, способы защиты и вопросы технического обслуживания.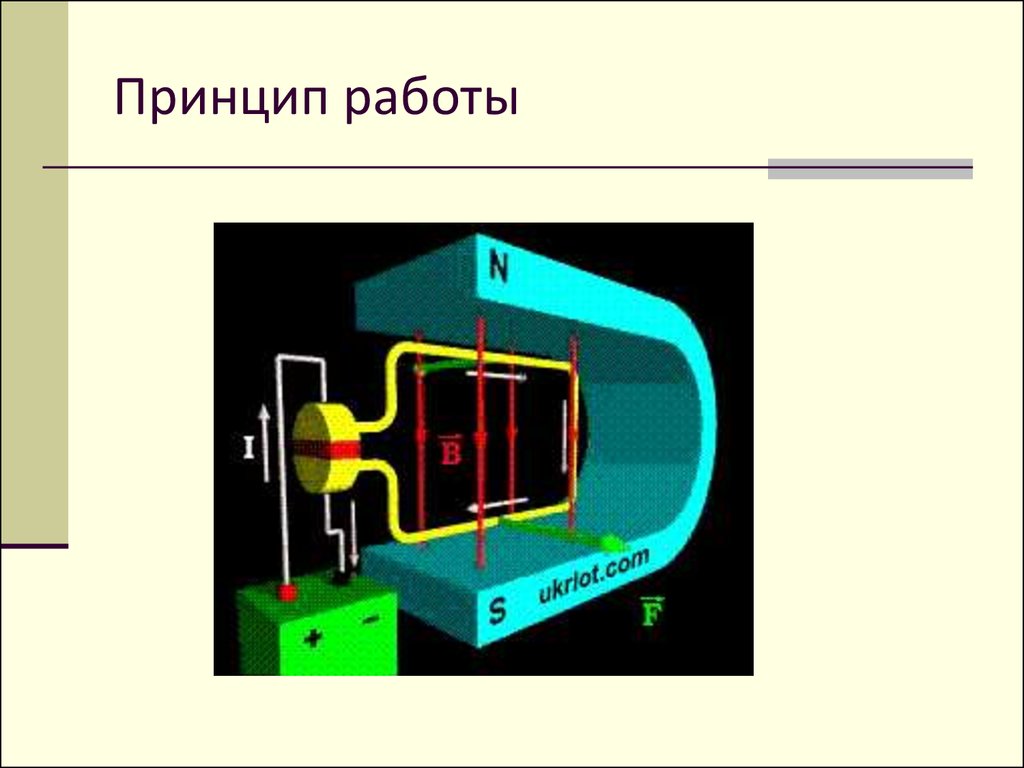
В данном разделе мы рассмотрим основные принципы работы электродвигателей. Здесь Вы получите общую информацию, которая потребуется в дальнейшем. Мы приведем основные сведения о магнетизме, AC (переменном токе), электромагнетизме, вращающем моменте и подробнее поговорим об электродвигателях.
Магнетизм
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор — Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор — Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC).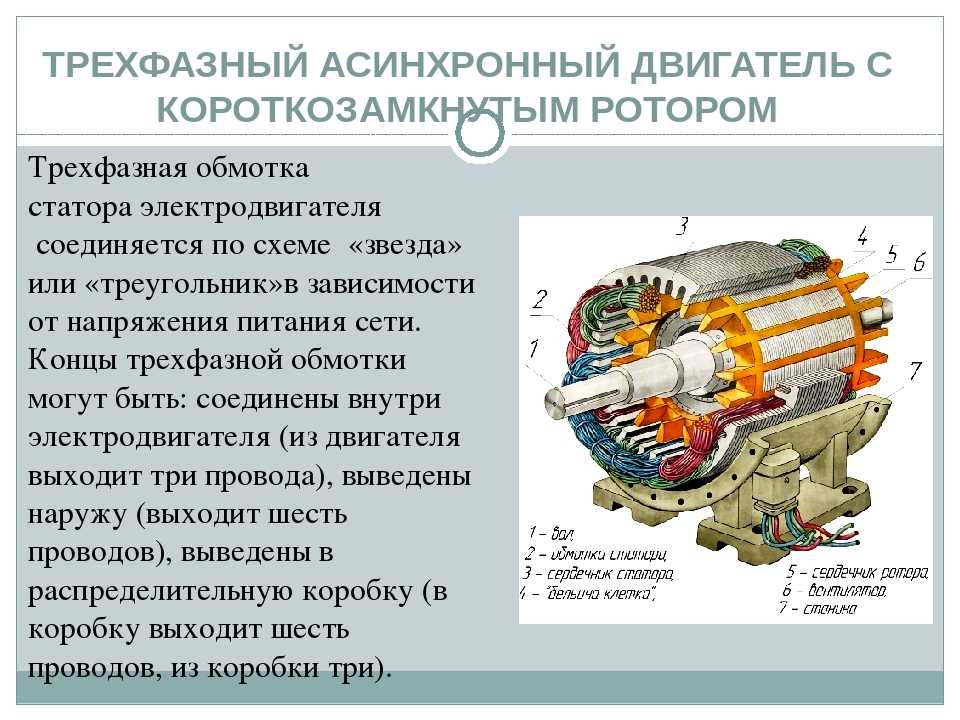 Таким образом, создаётся комбинированное магнитное поле статора.
Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём.
Переменный ток — AC
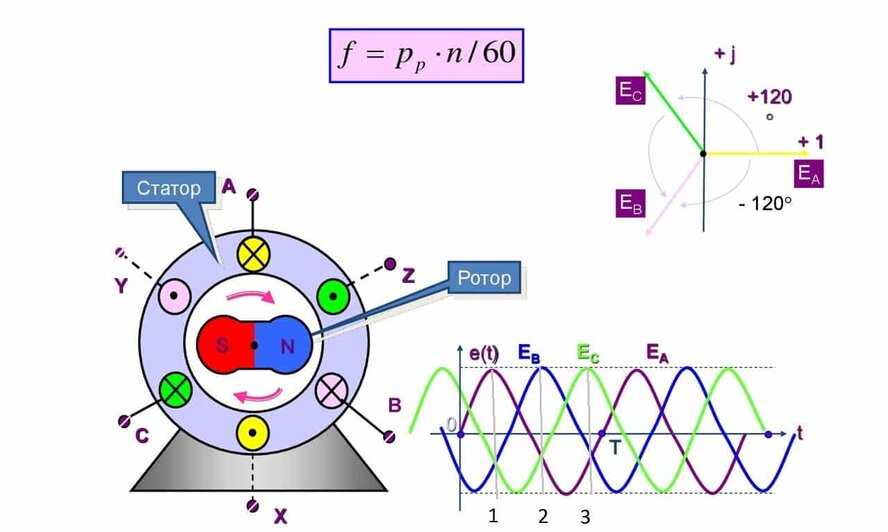
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Смена полюсов
Дальше мы объясним, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться. Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами:
1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2, а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов. Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость).
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
В предыдущем разделе мы установили, как обыкновенный магнит вращается в статоре.
В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит.
Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока.
Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Когда к статору подаётся питание, он создает магнитное поле, вектор которого направлен перпендикулярно проводникам ротора, магнитное поле создаёт ток в роторе.
Принцип действия
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора.
Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.
Статор
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (Δ Т). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор
В электродвигателях Grundfos используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок. При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток.
Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Скольжение
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.
Литература
GRUNDFOS – Электродвигатели
www.grundfos.com
: типы, принцип работы, применение
- Автор Кулдип С
- Последнее изменение 25-10-2022
Электродвигатель — одно из величайших изобретений человечества. Жизнь, которую мы ведем сегодня, связана с изобретением двигателей, иначе мы были бы просто светящимися лампочками с электричеством. Электродвигатель преобразует электрическую энергию в механическую.
Жизнь, которую мы ведем сегодня, связана с изобретением двигателей, иначе мы были бы просто светящимися лампочками с электричеством. Электродвигатель преобразует электрическую энергию в механическую.
Электродвигатель обычно предназначен для непрерывного вращения. Точнее говоря, электродвигатель используется для производства вращательной энергии. Электродвигатель – это устройство, которое мы все используем каждый день в своей деятельности. В этой статье мы предоставим подробную информацию об электродвигателе. Прокрутите вниз, чтобы узнать больше!
Практика Embibe’s Эксклюзивные образцы документов CBSE Term 1, основанные на новых рекомендациях:
Проще говоря, электрический двигатель — это устройство, преобразующее механическую энергию в электрическую энергию. Когда мы говорим здесь о механической энергии, мы имеем в виду вращательное или круговое движение. За счет электромагнитного действия части двигателя поворачиваются или вращаются. Это вращательное движение применяется во всех упомянутых выше устройствах.
За счет электромагнитного действия части двигателя поворачиваются или вращаются. Это вращательное движение применяется во всех упомянутых выше устройствах.
Различные типы электродвигателей
В зависимости от источника электроэнергии двигатели делятся на:
1. Двигатель постоянного тока
2. Двигатель переменного тока
Все двигатели состоят в основном из двух частей – ротора и статора
Ротор : это вращающаяся часть двигателя. В зависимости от типа двигателя в роторе может быть либо магнитная часть, либо катушки.
Статор : Это неподвижная часть двигателя. Как и выше, в зависимости от типа двигателя в статоре может находиться либо магнитная часть, либо катушки. 9{{\text{th}}}}\) века. Это явление называется магнитным эффектом электрического тока. Андре Мари Ампер, французский ученый, продемонстрировал, что на проводник с током, помещенный в магнитное поле, действует сила, заставляющая проводник двигаться. Майкл Фарадей, английский ученый, показал, что движущееся поле создает электрический ток.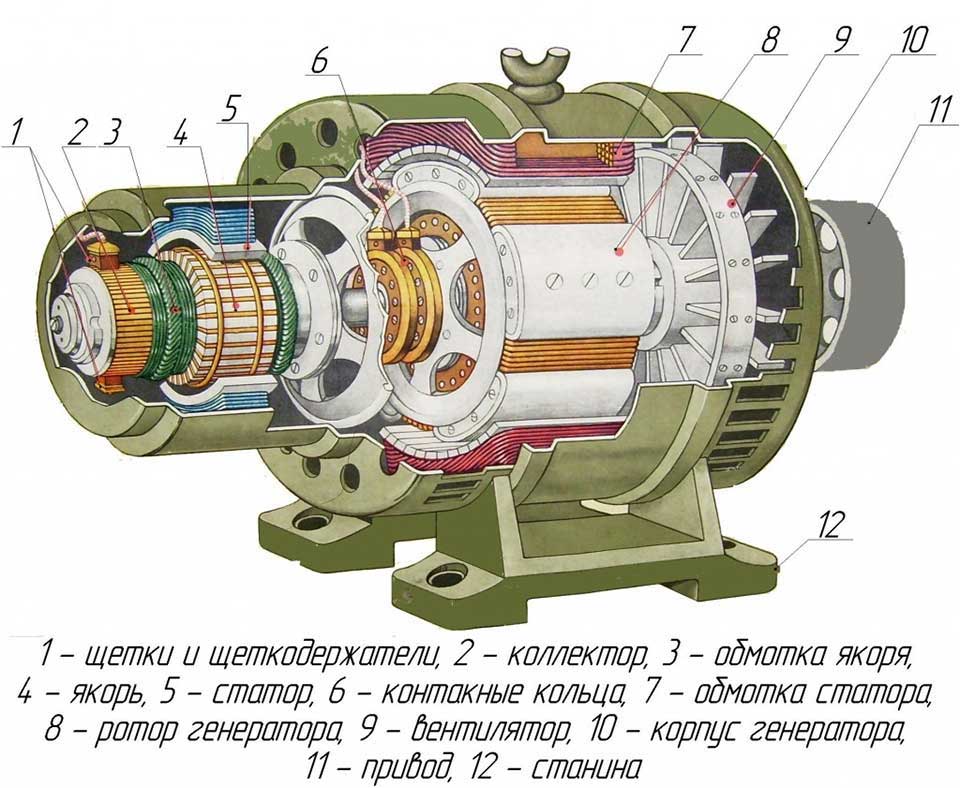 Эксперименты их и многих других ученых помогли разработать такие машины, как двигатели и генераторы.
Эксперименты их и многих других ученых помогли разработать такие машины, как двигатели и генераторы.
Проводник с током помещен в магнитное поле. На него действует сила, которая заставляет его двигаться в направлении, перпендикулярном как полю, так и току. Мы можем найти направление движения по правилу левой руки Флеминга, как показано на диаграмме выше.
Давайте посмотрим на работу нескольких типов моторов.
Работа двигателя постоянного тока
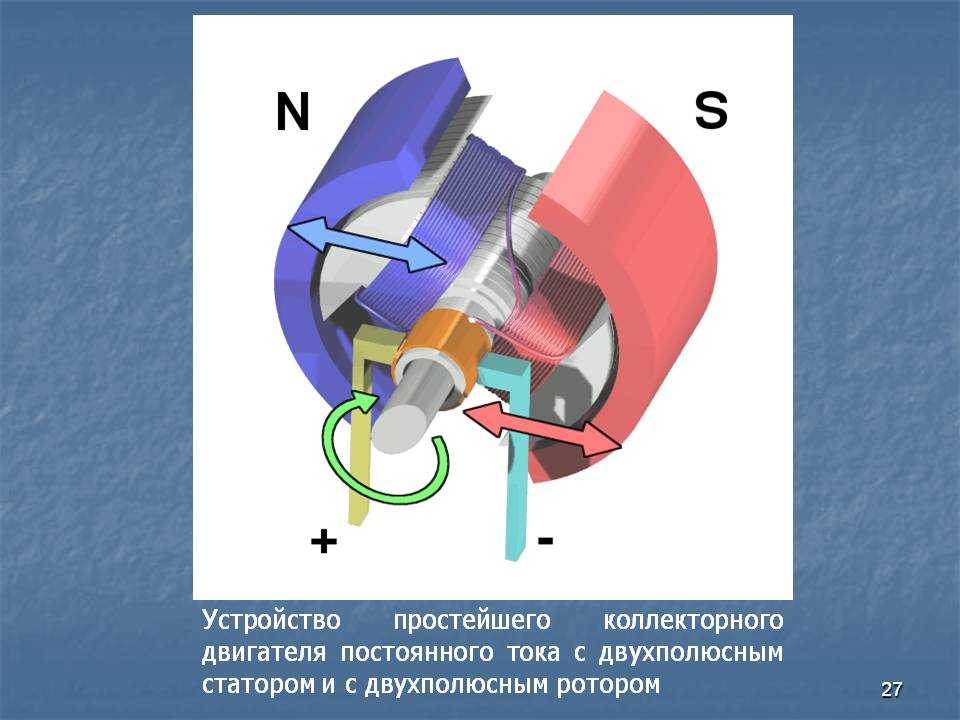
Он работает на постоянном токе \({\text{DC}}\) Чтобы понять его работу, давайте упростим его конструкцию до одной катушки между двумя полюсами.
Ток течет от \(A\) к \(B\) возле северного полюса и от \(C\) к \(D\) сбоку от южного полюса. Таким образом, направление тока и силовые линии перпендикулярны друг другу. Итак, на стороны \(AB\) и \(CD\) действует сила, направление которой определяется по правилу левой руки Флеминга.
На сторону \(AB\) действует направленная вверх сила, а на сторону \(CD\) действует направленная вниз сила.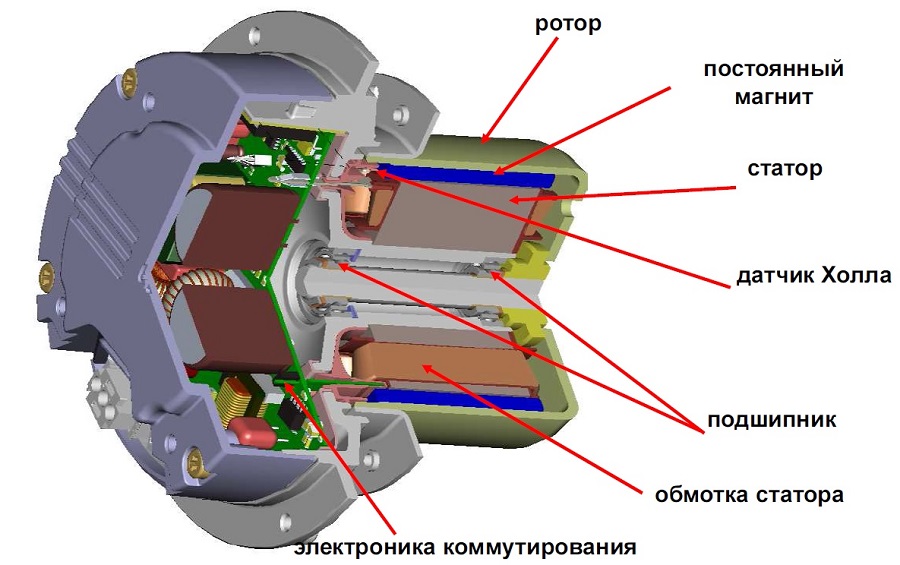 Итак, прямоугольная катушка \(ABCD\) движется по окружности. После полуоборота из-за раздвоенного кольца ток течет в направлении \(D\) к \(C\) у северного полюса и \(B\) к \(A\) у южного полюса. Итак, нет изменения направления силы с обеих сторон, и катушка вращается непрерывно.
Итак, прямоугольная катушка \(ABCD\) движется по окружности. После полуоборота из-за раздвоенного кольца ток течет в направлении \(D\) к \(C\) у северного полюса и \(B\) к \(A\) у южного полюса. Итак, нет изменения направления силы с обеих сторон, и катушка вращается непрерывно.
Практичный двигатель \({\text{DC}}\) имеет множество катушек, намотанных на сердечник, называемый якорем. Их концы соединены с разъемными кольцами, называемыми коммутаторами. Бесщеточные двигатели не используют коммутаторы.
В малых двигателях используются постоянные магниты. В больших двигателях используются электромагниты. В зависимости от способа соединения обмоток полюсов электромагнита и якоря двигатели \({\text{DC}}\) классифицируются как:
a. Двигатель \({\text{DC}}\) с независимым возбуждением : Имеются две отдельные обмотки для полюсов и якоря.
б. Двигатель \({\text{DC}}\) с самовозбуждением : Полюса и якорь подключены к одному и тому же источнику питания. Типы двигателей с самовозбуждением:
Типы двигателей с самовозбуждением:
я. Двигатель серии \({\text{DC}}\) : Катушки для полюсов и якоря соединены последовательно, то есть через них проходит один и тот же ток.
ii. Шунтовой двигатель \({\text{DC}}\) : Катушки для полюсов и якоря параллельны друг другу.
III. Составной двигатель \({\text{DC}}\) : это комбинация как последовательных, так и параллельных двигателей.
Двигатели переменного тока
Двигатели переменного тока работают от источника переменного тока (AC). Используя переменный ток, можно заставить магнитное поле вращаться. Скорость вращения поля называется синхронной скоростью. Синхронная скорость может быть рассчитана из уравнения
\( {N_s} = \frac{ {120f}}{P}\)
где,
\(N_s\) — синхронная скорость, в об/мин (оборотов в минуту)
\(f\) — частота подача переменного тока, в герцах \(\left({Hz} \right)\)
\(P\) число магнитных полюсов
Их можно классифицировать как:
a. Синхронный двигатель
Синхронный двигатель
б. Асинхронный двигатель
В синхронном двигателе якорь магнитно связан с полем. Поэтому оно вращается вместе с ним с той же скоростью, что и поле. Поэтому он называется синхронным двигателем.
В зависимости от фазы питания переменного тока синхронные двигатели могут быть-
i. Однофазный синхронный двигатель
ii. Трехфазный синхронный двигатель
Магнитное поле вращается с синхронной скоростью, но якорь вращается не с той же скоростью, а немного медленнее. Существует скольжение между скоростью магнитного поля и скоростью ротора. Поэтому асинхронные двигатели также называют асинхронными двигателями.
В зависимости от источника переменного тока асинхронные двигатели могут быть-
и. Однофазный асинхронный двигатель:
Как и в однофазных синхронных двигателях, вращающееся магнитное поле создается в обмотке статора с помощью конденсаторов или разделенных обмоток.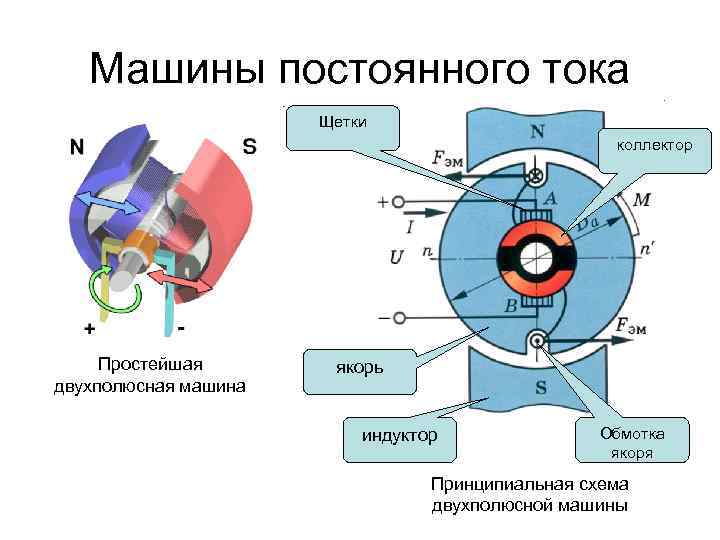 В устройствах малой мощности, таких как бытовая техника, используются однофазные асинхронные двигатели.
В устройствах малой мощности, таких как бытовая техника, используются однофазные асинхронные двигатели.
ii. Трехфазный асинхронный двигатель:
Их также называют самозапускающимися двигателями, так как для их запуска не требуются дополнительные обмотки, конденсаторы или специальные устройства. Таким образом, эти двигатели являются самыми простыми из всех типов двигателей.
Как следует из названия, он работает по принципу взаимной индукции. Существует два типа роторов: с короткозамкнутым ротором и с фазовой обмоткой (также называемый ротором с контактными кольцами). Оба эти типа являются замкнутыми цепями. Переменное магнитное поле в статоре создает взаимную индукцию в роторе. В результате в обмотках ротора индуцируется ток. Магнитное поле, создаваемое этим наведенным током, действует на поле обмотки статора. Это взаимодействие между полем статора и полем ротора является принципом вращения ротора в том же направлении, что и поле статора.
Как написано в начале этой статьи, мы видим двигатели в домах и на производстве. Некоторые из применений двигателей в зависимости от их типов:
Некоторые из применений двигателей в зависимости от их типов:
Как правило, это небольшие приложения. Например, они используются в игрушках, компьютерных приводах, автомобильных дворниках, портативных воздуходувках, вибраторах в мобильных телефонах.
Двигатели серии
Они используются там, где присутствуют большие нагрузки. Некоторые из них используются в кранах, подъемниках, подъемниках, конвейерах, швейных машинах.
Шунтирующие двигателиОни используются, когда требуется точное регулирование скорости. Некоторые из применений находятся в сверлильных станках, токарных станках, воздуходувках, вентиляторах, центробежных насосах.
Составные двигателиОни сочетают в себе свойства последовательных и параллельных двигателей. Лифты, прокатные станы, конвейеры — вот некоторые из приложений.
Решения NCERT для 12-й главы физики
Синхронные двигатели Они используются, когда требуется точная скорость. Точная скорость необходима в таких системах, как серводвигатели, авиационные гирокомпасы и робототехника. Проигрыватели дисков, электрические часы, таймеры, вертушки — вот лишь некоторые из областей применения синхронных двигателей.
Точная скорость необходима в таких системах, как серводвигатели, авиационные гирокомпасы и робототехника. Проигрыватели дисков, электрические часы, таймеры, вертушки — вот лишь некоторые из областей применения синхронных двигателей.
Бытовая техника, такая как холодильники, пылесосы, кондиционеры, вентиляторы, смесители, водяные насосы, фены – это лишь некоторые из областей применения однофазных асинхронных двигателей.
Трехфазные асинхронные двигатели используются в промышленных и тяжелых условиях, таких как компрессоры, измельчители, мельницы, подъемники, подъемные краны.
Решенные примеры для электродвигателя
Резюме В этой статье мы увидели, как взаимосвязь между электричеством и магнитным полем используется для создания движущей силы. В зависимости от источника электроэнергии двигатели делятся на два типа, а именно: двигатели постоянного и переменного тока. Мы используем различные типы двигателей в зависимости от источника электроэнергии, его типов, а также характера выполняемой работы.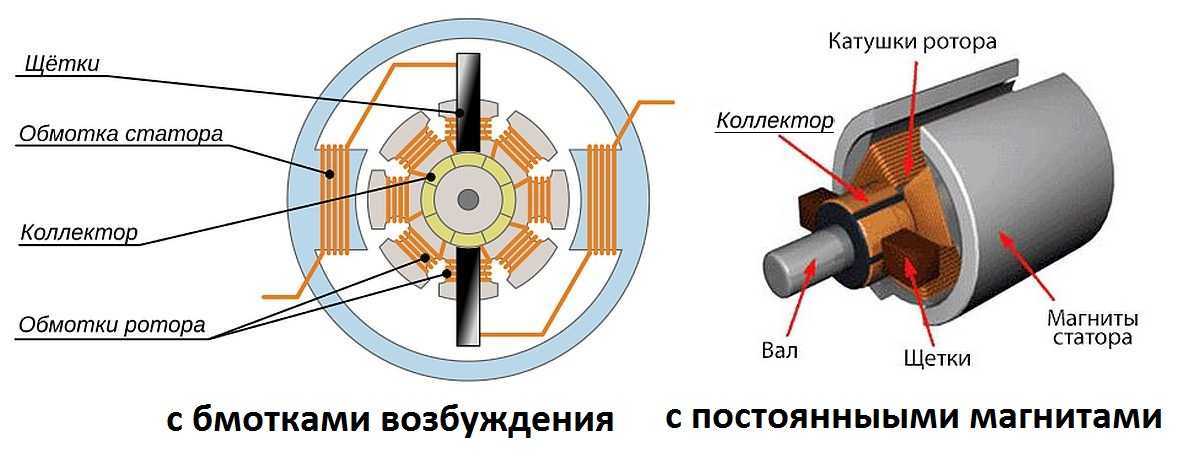 Некоторые работы предполагают большие нагрузки, а некоторые требуют правильной скорости. Конструкция двигателей и их обмотки также меняются в зависимости от источника и выполняемой ими работы.
Некоторые работы предполагают большие нагрузки, а некоторые требуют правильной скорости. Конструкция двигателей и их обмотки также меняются в зависимости от источника и выполняемой ими работы.
Q.1. Во что электродвигатель преобразует электрическую энергию?
Ответ: Электродвигатель преобразует электрическую энергию в механическую. Он создает вращательное движение.
Q.2. Какие существуют типы двигателей, основанных на электрическом питании?
Ответ: В зависимости от электроснабжения двигатели могут быть постоянного тока \(\left({DC} \right).\) или переменного тока переменного тока.
Q.3. Каковы две основные части любого двигателя?
Ответ: Двигатель вращается, когда на него подается питание. Таким образом, любой двигатель состоит из двух основных частей, называемых статором и ротором. Статор — неподвижная или неподвижная часть двигателя. Ротор – это вращающаяся часть двигателя.
Статор — неподвижная или неподвижная часть двигателя. Ротор – это вращающаяся часть двигателя.
Q.4. Какое направление показывает большой палец при использовании правила левой руки Флеминга?
Ответ: Большой палец показывает направление силы, вызывающей движение проводника в магнитном поле.
Q.5. Почему синхронный двигатель так называется?
Ответ: Скорость вращения магнитного поля при подаче переменного тока на якорь называется синхронной скоростью. Ротор также работает с той же скоростью в синхронном двигателе.
Мы надеемся, что эта подробная статья об электродвигателе поможет вам в подготовке. Если вы застряли, сообщите нам об этом в разделе комментариев ниже, и мы свяжемся с вами в ближайшее время.
Электродвигатель — GeeksforGeeks
Электродвигатель, используемый для выработки механической энергии в форме вращения.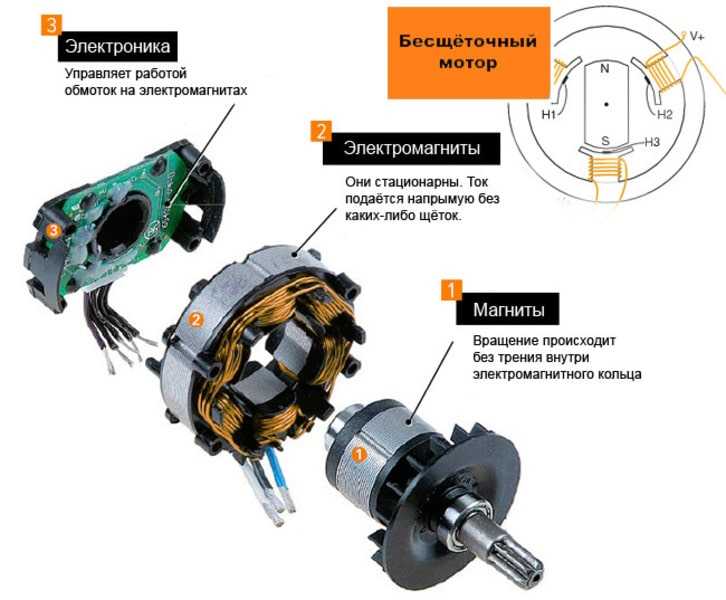 Давайте рассмотрим пример: какова цель электрического вентилятора в вашем доме? Он начинает вращаться при включении выключателя и начинает выдувать воздух, вращая лопасти. Итак, каков был бы ответ, если бы кто-то спросил о его работе? Это из-за электричества? Нет, электричество — это способ запустить электрический вентилятор, то есть преобразование электрической энергии в механическую. Но как происходит преобразование электрической энергии в механическую? Что происходит внутри электродвигателя? Давайте обсудим это.
Давайте рассмотрим пример: какова цель электрического вентилятора в вашем доме? Он начинает вращаться при включении выключателя и начинает выдувать воздух, вращая лопасти. Итак, каков был бы ответ, если бы кто-то спросил о его работе? Это из-за электричества? Нет, электричество — это способ запустить электрический вентилятор, то есть преобразование электрической энергии в механическую. Но как происходит преобразование электрической энергии в механическую? Что происходит внутри электродвигателя? Давайте обсудим это.
Что такое электродвигатель?
Электродвигатель — это машина, которая используется для преобразования электрической энергии в механическую. Когда проводник с током помещается в магнитное поле, он испытывает некоторые силы, которые помогают вращению вала или оси.
Двигатель — это механизм, преобразующий электрическую энергию в механическую. Миксер, например, имеет вращающиеся лопасти, которые перемешивают и смешивают ингредиенты. Подводимая к смесителю электрическая энергия преобразуется в механическую энергию вращения лопасти, что приводит к желаемому действию.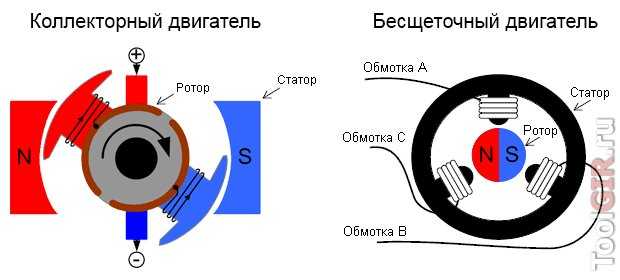
- Двигатель работает по принципу магнитного эффекта тока. Когда проводник с током создает вокруг себя магнитное поле, на проводник с током действует сила, когда он расположен перпендикулярно магнитному полю.
- Когда прямоугольную катушку помещают в магнитное поле и через нее пропускают ток, на катушку действует сила, заставляющая ее непрерывно вращаться.
- Рассмотрим полюса двух стержневых магнитов, обращенных друг к другу и разделенных узким проходом. Небольшой отрезок проводящего провода скручивают в петлю и помещают в зазор между магнитами так, чтобы он находился в магнитном поле, создаваемом магнитами. Когда концы петли подключаются к клеммам батареи, петля начинает вращаться. Это связано с тем, что магнитное поле магнита препятствует прохождению электрического тока в проводник. Индуцированный Южный полюс притягивается к Северному полюсу из-за индуцированных магнитных полюсов в круге, и наоборот.
 Когда ток в круге меняется на противоположный, вызванный Южный полюс становится Северным полюсом и притягивается к южному полюсу магнита. Это приводит к бесконечному вращению круга.
Когда ток в круге меняется на противоположный, вызванный Южный полюс становится Северным полюсом и притягивается к южному полюсу магнита. Это приводит к бесконечному вращению круга.
 Когда ток в круге меняется на противоположный, вызванный Южный полюс становится Северным полюсом и притягивается к южному полюсу магнита. Это приводит к бесконечному вращению круга.
Когда ток в круге меняется на противоположный, вызванный Южный полюс становится Северным полюсом и притягивается к южному полюсу магнита. Это приводит к бесконечному вращению круга.Правило левой руки Флеминга
Указательный, средний и большой пальцы левой руки должны быть вытянуты перпендикулярно друг другу таким образом, чтобы указательный палец представлял направление магнитного поля, средний палец представляет направление тока в проводнике, а большой палец указывает направление движения проводника согласно правилу левой руки Флеминга.
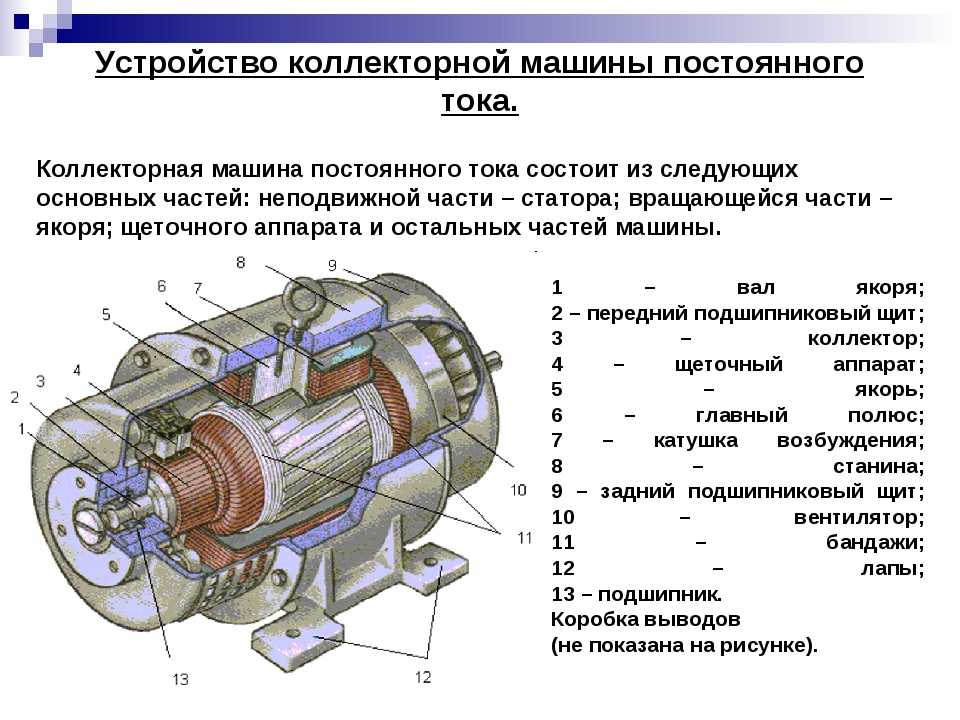
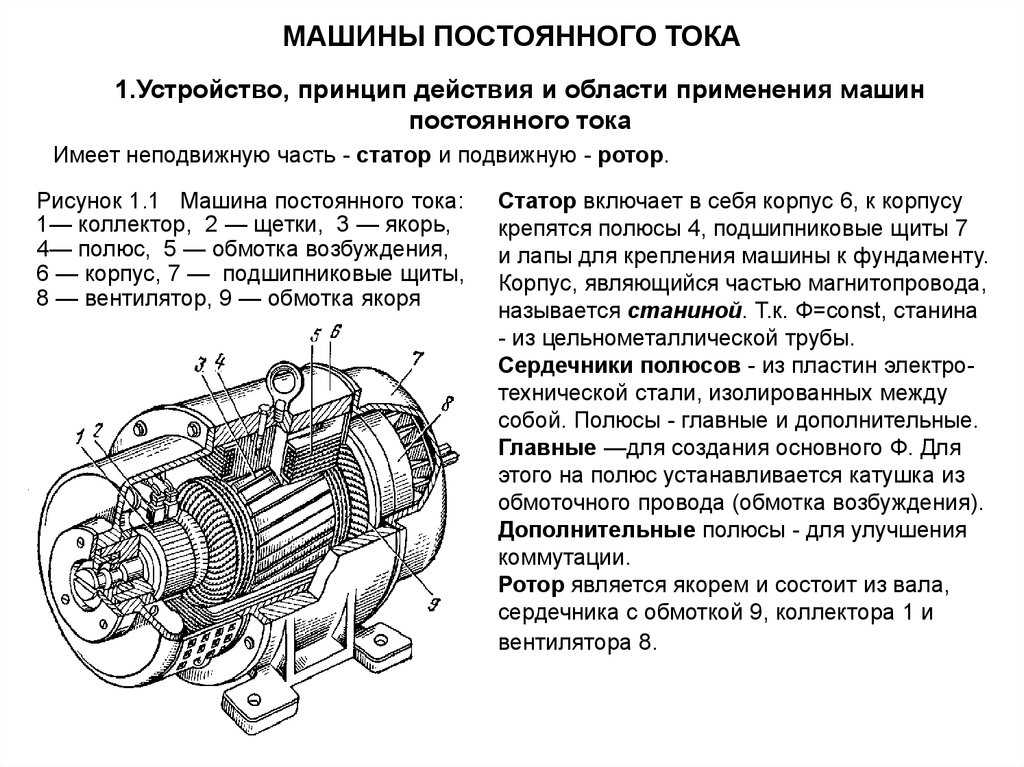
Конструкция электродвигателяКонструкция электродвигателя
Ниже приведены основные части двигателя, показанные на рисунке выше, с соответствующими функциями:
- Аккумулятор: Аккумулятор — это источник питания постоянного тока, который часто подключается к базовой мотор. Он подает постоянный ток на обмотку якоря.
- Щетки: В электродвигателе имеются две угольные щетки, которые служат в качестве соединения между коммутатором и клеммами аккумулятора.
- Постоянный магнит: создает сильное магнитное поле.
- Коллектор с разъемным кольцом: Реверсирование тока в обмотке якоря происходит с помощью коммутатора. Он состоит из двух половинок металлических колец. Два конца катушки якоря соединены с металлическим кольцом этих двух половинок.
- Сердечник якоря: Катушка якоря удерживается на месте сердечником якоря, а также обеспечивает механическую поддержку катушки.
- Катушка якоря: Состоит из одной или нескольких прямоугольных петель из изолированного медного провода.
- Ось или вал: Это место, где происходит обмен механической энергией. На валу установлены сердечник якоря и коллектор.
Работа электродвигателя
- Первоначально щетка B 1 касается полукольца коллектора R 1 , а щетка B 2 касается полукольца коллектора R 2 . Ток течет от A к B вдоль стороны катушки l 1 прямоугольной катушки ABCD и от C к D вдоль стороны катушки l 2 . Магнитное поле направлено от северного полюса магнита к его южному полюсу.
- Сила F со стороны катушки l 1 катушки направлена вниз, а сила F со стороны катушки l 2 катушки направлена вверх, согласно Флемингу. Правило левой руки. В результате сторона катушки l 1 опускается вниз, а его сторона l 2 поднимается вверх. Это заставляет катушку ABCD вращаться против часовой стрелки.
- Когда катушка достигает вертикального положения при вращении, щетки входят в зазор между двумя кольцами коммутатора, который перекрывает протекание тока и в катушке. Несмотря на то, что ток i к катушке отключается, когда она достигает точного вертикального положения, катушка продолжает вращаться, поскольку имеет импульс и переместилась за пределы вертикального положения.
- Когда катушка выходит из вертикального положения после полуоборота, сторона катушки l 2 перемещается влево, а сторона катушки l 1 перемещается вправо, и два полукольца коммутатора автоматически меняют положение контакта от одной щетки к другой, то есть щетка B 1 контактирует с полукольцом коммутатора R 2 , а щетка B 2 контактирует с полукольцом коммутатора R 1 . Это делает ток катушки i поток в другом направлении.
- Теперь сила, действующая на стороны l 1 и l 2 катушки, меняется на противоположную, когда направление тока i меняется на противоположное. Сторона катушки l 2 теперь находится слева, к ней приложена направленная вниз сила F , а сторона l 1 теперь находится справа, к ней приложена направленная вверх сила F . В результате сторона катушки l 2 опускается вниз, а сторона катушки l 1 выдвигается вверх. Это заставляет катушку вращаться против часовой стрелки.
- После каждого полуоборота ток в катушке меняется на противоположный, и катушка продолжает вращаться до тех пор, пока через нее передается электричество от батареи.
 Ток течет от A к B вдоль стороны катушки l 1 прямоугольной катушки ABCD и от C к D вдоль стороны катушки l 2 . Магнитное поле направлено от северного полюса магнита к его южному полюсу.
Ток течет от A к B вдоль стороны катушки l 1 прямоугольной катушки ABCD и от C к D вдоль стороны катушки l 2 . Магнитное поле направлено от северного полюса магнита к его южному полюсу.
 Это заставляет катушку вращаться против часовой стрелки.
Это заставляет катушку вращаться против часовой стрелки.Использование электродвигателяПримеры задачЭлектродвигатели используются для самых разных целей. Ниже приводится список некоторых из них.
- Электромобили: Электромобили, используемые в путешествиях. и это без загрязнения.
- Прокатные станы: Прокатные станы используются для уменьшения ширины твердых материалов, таких как металлы.
- Электрические краны: Электрические краны, используемые для подъема тяжелых предметов.
- Лифты: В основном используются в больших зданиях.
- Сверлильный станок: Сверлильный станок, используемый для проделывания отверстий в стенах или лесу
- Вентилятор: Вентиляторы используются для продувки воздуха.
- Фены: Фены для сушки влажных волос.
- Магнитофон: Магнитофон, используемый для записи аудио или видео.
- Стиральная машина: Стиральная машина предназначена для стирки одежды.
- Миксеры: Миксеры используются для приготовления пюре и перемешивания.
КПД двигателя примерно 70-85%, так как оставшаяся энергия тратится на производство тепла и издаваемый звук.
Задача 1. Сформулируйте правило левой руки Флеминга.
Решение:
Правило левой руки Флеминга гласит, что указательный, средний и большой пальцы левой руки должны быть вытянуты перпендикулярно друг другу таким образом, чтобы указательный палец представлял направление магнитного поля, средний палец представляет направление тока в проводнике, а большой палец указывает направление движения проводника согласно правилу левой руки Флеминга.

Задача 2: Каков принцип работы электродвигателя?
Решение:
Двигатель работает по принципу магнитного эффекта тока. Когда проводник с током создает вокруг себя магнитное поле, на проводник с током действует сила, когда он расположен перпендикулярно магнитному полю.
Задача 3: Какова роль разрезного кольца в электродвигателе?
Решение:
Реверсирование тока в обмотке якоря происходит с помощью коммутатора. Он состоит из двух половинок металлических колец. Два конца катушки якоря соединены с этими двумя половинками металлического кольца.
Задача 4. Как узнать направление магнитного поля, создаваемого проводником с током?
Решение:
Правило большого пальца правой руки Максвелла используется для определения направления силовых линий магнитного поля, создаваемых прямым проводом, по которому течет электричество.
 Представьте себе, что провод с током находится в правой руке, при этом большой палец указывает направление тока, а направление, в котором пальцы обхватывают провод, определяет направление магнитных силовых линий вокруг провода.
Представьте себе, что провод с током находится в правой руке, при этом большой палец указывает направление тока, а направление, в котором пальцы обхватывают провод, определяет направление магнитных силовых линий вокруг провода.Задача 5: В чем разница между стержневым магнитом и электромагнитом.
Solution:
Following are the difference between a bar magnet and an electromagnet:
Bar Magnet Electromagnet 1. It is a permanent магнит. Это временный магнит. 2. Он создает относительно слабую силу притяжения. Генерирует мощное магнитное поле. 3. Сила стержневого магнита не может быть изменена. Силу электромагнита можно изменить, изменив количество витков в его катушке или ток, протекающий через нее.