
Как определить начало и конец обмоток трехфазного электродвигателя
В данной статье мы постарались максимально подробно объяснить, как правильно определить необходимые выводы обмотки асинхронного трехфазного электродвигателя, в частности АИР, для дальнейшего правильного его подключения.
Определение пар выводов с помощью тестера
Пара выводов – это конец и начало одной обмотки трехфазного электродвигателя. Для определения пары начало/конец одной обмотки используют тестер, установленный на предел измерения сопротивления:
- Первый щуп тестера подсоединяют к одному из выводов
- Вторым поочередно касаются остальных проводов.
- Если на какой-то паре покажется целостность цепи – это и будет одна из фазных обмоток
- Аналогично выделяются все обмотки
- Каждую из обмоток помечают
Определение начала и конца одной обмотки
При подаче напряжения на любую из обмоток статора, оно индуцируется в оставшиеся 2 обмотки.
Используя эту особенность, тестер и сеть низкого напряжения, можно определить начала и концы обмоток:
- Произвольно соединяются 2 вывода разных обмоток
- На оставшиеся концы обмоток подается низкое напряжение и проверяется напряжение на соединенных обмотках: (напряжение есть – значит соединенные провода – начало одной и конец другой обмотки. Напряжения нет – значит соединены 2 конца, либо 2 начала)
- Концы без напряжения условно помечаются как начала
- Повторяется опыт и соединяется уже найденное начало одной из обмоток с любым выводом на которое подавалось напряжение ранее. Теперь напряжение подается на оставшуюся обмотку.
- Поочередно, подобным образом, проверяются все обмотки.
Найдя начала и концы обмоток, можно приступать к подключению асинхронного электродвигателя по схемам «звезда» либо «треугольник».
Как видно из таблиц обмоточных данных электродвигателей серии АИР, большинство электродвигателей АИР предполагают подключение к сети 220/380 В. Соединив концы обмоток по схеме “треугольник” двигатель будет работать от питания 220 В, а по схеме “звезда” – от 380 В.
Соединив концы обмоток по схеме “треугольник” двигатель будет работать от питания 220 В, а по схеме “звезда” – от 380 В.
Маркировка концов обмотки
Как правило, выводы обмоток асинхронных электродвигателей АИР маркированы попарно и имеют такие обозначения:
Фаза 1: С1 (начало) С4 (конец)
Фаза 2: С2 (начало) С5 (конец)
Фаза 3: С3 (начало) С6 (конец)
Первоочередно определяют и выделяют каждую из пар обмоток электродвигателя. Но порой, для правильного подключения, необходимо определить концы и начала обмоток самостоятельно.
Для более подробного просмотра электрических параметров – переходите к интересующей Вас модели электродвигателя АИР.
Контакты менеджера
Менеджер Артем
+38 (099) 40-20-100
+38 (098) 40-20-100
г. Харьков, ул. Родниковая 74
Полезное:
- Новокаховский электромашиностроительный завод НКЕМЗ. Каталог двигателей 4АМУ, 6АМУ, АИММ, АИУ
- Схема подключения асинхронного двигателя
- Асинхронні електродвигуни АИР
- Болгарские электродвигатели M, МО, AD, AT и аналоги
Мы вам рекомендуем:
>Мотор Колесо Дуюнова | Совмещенная обмотка Славянка.
 Асинхронный двигатель
Асинхронный двигательКраткое описание и введение.
В чем отличие обычного китайского bldc двигателя и асинхронного двигателя? Всё дело в разности конструкций. В асинхронном двигатели не используются постоянные магниты. Магнитное поле там генерируют сами обмотки, когда на них подаётся ток. И когда поле поворачивается, колесо начинает крутиться. Поворотом поля и прочими функциями управляет контроллер.
Главные плюсы новой технологии.
Ни для кого не секрет, что асинхронные двигатели придуманы давно. Первооткрывателями технологии является Доливо Добровольский. В 1889 г. задокументированы первые наброски этой технологии. И до 1995 года эти двигатели имели огромный вес и габариты. Но были энергоэффективней обычный bldc двигателей на магнитах и имели ряд других преимуществ. Например меньший пусковой ток.
И так было до 1995 года, когда Дмитрий Александрович Дуюнов не занялся разработкой собственной обмотки.
Инновационная обмотка Славянка.
В 1995 году была создана новая обмотка славянка. Разработкой занималось ООО АС и ПП во главе с Дмитрием Александровичем Дуюновым и Евгением Дуюновым. Была создана совмещенная обмотка для асинхронных двигателей, которая позволила не только увеличить срок службы двигателей, а так же снизить нагрузки на обмотки, уменьшить температуру обмоток. И увеличить энергоэффективность двигателя почти на 30%. А пусковой ток снизить еще на 15%!
Применение технологии.
И так с 1995 года технология начала активно применяться. Стали перематываться двигатели на заводах, в котельных, генераторных. И прочих местах, где применяются асинхронные двигатели. Стали появляться лицензированные обмотчики, которые получив лицензию на перемотку, стали перематывать двигатели по всей России. На текущий момент двигателей, которые работают на новой технологии совмещенных обмоток, более 100.000 штук!
Смысл и цели.
Технология совмещенных обмоток дала следующие плюсы. Моторы перестали греться. А следовательно срок службы их значительно увеличился. Вместе с этим увеличилась и их мощность. А так же Это дало возможность уменьшить габариты двигателей! А следовательно бОльшую мощность теперь можно получить с меньшего двигателя. При этом он будет потреблять меньше электроэнергии. Что позволит снизить энергозатраты в среднем на 30%. И это реальная цифра.
Асинхронное мотор-колесо Дуюнова.
Как только стало понятно, что размеры асинхронного двигателя с совмещенной обмоткой Славянка, можно сильно уменьшить (не потеряв в производительности), было принято решение создать небольшое мотор-колесо по этой же технологии. Которое можно будет применять в электротранспорте. Электровелосипеды, электроскутеры, электромобили, электрокары, инвалидные электро коляски, электро рикши и многое многое другое. В электротранспорте большое значение имеет пусковой ток, а так же потребление в движении.
Графики стендовых испытаний
распространенных типов промышленных двигателей | Центр энергоэффективности ОГУ
Индукционный/асинхронный переменный ток
Большинство промышленных двигателей представляют собой асинхронные двигатели трехфазного переменного тока из-за их надежности и низкой стоимости.
В этом случае электрический ток в обмотке статора создает вращающееся магнитное поле, которое «индуцирует» (отсюда и название) электрический ток в роторе. Ток, индуцируемый в роторе, создает магнитное поле, которое взаимодействует с полем статора, создавая вращение в роторе. Асинхронный двигатель должен работать на скорости немного ниже синхронной, учитывая, что вращение на синхронной скорости не приведет к индуцированному току ротора.
Ток, индуцируемый в роторе, создает магнитное поле, которое взаимодействует с полем статора, создавая вращение в роторе. Асинхронный двигатель должен работать на скорости немного ниже синхронной, учитывая, что вращение на синхронной скорости не приведет к индуцированному току ротора.
Вот почему асинхронные двигатели называются асинхронными, потому что ротор вращается медленнее, чем вращающееся магнитное поле статора, создавая крутящий момент на выходном валу.
Если ротор вращается быстрее, чем вращающееся магнитное поле статора, в статоре будет индуцироваться ток. В этом сценарии асинхронные двигатели могут работать как генераторы.
Асинхронные двигатели недороги, потому что для их работы требуются только электромагниты в статоре и роторе. Они также надежны, потому что им не нужны коммутаторы для передачи тока на ротор, что снижает вероятность дугового разряда и фрикционного износа.
Большинство промышленных объектов используют асинхронные двигатели из-за их желаемых характеристик, таких как надежность, простота и доступность.
Асинхронный двигатель с короткозамкнутым ротором ( Википедия )
Синхронный переменный ток
У синхронных двигателей вращение вала синхронизировано с частотой тока, подаваемого на двигатель. Статор двигателя содержит электромагниты, создающие магнитное поле, которое вращается в соответствии с характеристиками приложенного к нему тока. Ротор содержит постоянные магниты или электромагниты, которые реагируют на магнитное поле, создаваемое в роторе, создавая вращение вала. Ротор требует физического подключения к электросети с помощью коммутатора, обычно состоящего из токопроводящей щетки, которая может изнашиваться при использовании.
Эти двигатели называются синхронными, потому что ротор вращается с той же скоростью, что и вращающееся магнитное поле статора.
Хотя синхронные двигатели переменного тока используются реже из-за более высокой стоимости, они демонстрируют более высокую энергоэффективность, чем асинхронные двигатели переменного тока.
Синхронные двигатели переменного тока уникальны тем, что с их помощью можно корректировать коэффициент мощности промышленного объекта.
Векторы магнитного поля синхронного двигателя ( Википедия )
Синхронный постоянный ток
Двигатели постоянного тока являются наименее распространенным типом двигателей, на смену которым пришли современные двигатели переменного тока.
Статор создает статическое магнитное поле, а ротор создает вращающееся магнитное поле, питаемое коммутатором.
В результате магнитное поле ротора пытается выровняться с магнитным полем статора, что создает крутящий момент на выходном валу.
Вместо того, чтобы использовать электромагниты для создания статического магнитного поля, двигатели постоянного тока с постоянными магнитами используют магниты для создания поля. Поскольку магнитное поле всегда присутствует независимо от состояния питания двигателя, двигатели с постоянными магнитами могут притягивать другие близлежащие ферромагнитные материалы, создавая потенциальный риск в промышленных условиях.
Двигатели постоянного тока с постоянными магнитами также тяжелее и громоздче из-за использования магнитов в статоре.
Анимация работающего двигателя постоянного тока ( Википедия )
Бесколлекторный электродвигатель постоянного тока — переиздание Википедии // WIKI 2
Двигатель от 3,5-дюймового дисковода гибких дисков. Катушки, расположенные радиально, изготовлены из медной проволоки, покрытой синей изоляцией. Ротор (вверху справа) снят и перевернут. Серое кольцо внутри его чашки — это постоянный магнит. Этот конкретный мотор — Outrunner со статором внутри ротора.
Бесщеточный канальный вентилятор постоянного тока. Две катушки на печатной плате взаимодействуют с шестью круглыми постоянными магнитами в узле вентилятора.
Бесщеточный электродвигатель постоянного тока ( BLDC ), также известный как двигатель с электронной коммутацией , представляет собой синхронный двигатель, использующий источник питания постоянного тока (DC). Он использует электронный контроллер для переключения постоянного тока на обмотки двигателя, создающие магнитные поля, которые эффективно вращаются в пространстве и за которыми следует ротор с постоянными магнитами. Контроллер регулирует фазу и амплитуду импульсов постоянного тока для управления скоростью и крутящим моментом двигателя. Эта система управления является альтернативой механическому коммутатору (щеткам), используемому во многих обычных электродвигателях.
Он использует электронный контроллер для переключения постоянного тока на обмотки двигателя, создающие магнитные поля, которые эффективно вращаются в пространстве и за которыми следует ротор с постоянными магнитами. Контроллер регулирует фазу и амплитуду импульсов постоянного тока для управления скоростью и крутящим моментом двигателя. Эта система управления является альтернативой механическому коммутатору (щеткам), используемому во многих обычных электродвигателях.
Конструкция системы бесщеточного двигателя обычно аналогична конструкции синхронного двигателя с постоянными магнитами (PMSM), но также может быть переключаемым реактивным двигателем или асинхронным двигателем. Они также могут использовать неодимовые магниты и быть бегущими (статор окружен ротором), внутренними бегунками (ротор окружен статором) или осевыми (ротор и статор плоские и параллельные). [1]
Преимуществами бесщеточного двигателя по сравнению с щеточными двигателями являются высокое отношение мощности к весу, высокая скорость, почти мгновенное регулирование скорости (об/мин) и крутящего момента, высокий КПД и низкие эксплуатационные расходы. Бесщеточные двигатели находят применение в таких областях, как компьютерная периферия (дисководы, принтеры), ручные электроинструменты и транспортные средства, от моделей самолетов до автомобилей. В современных стиральных машинах бесщеточные двигатели постоянного тока позволили заменить резиновые ремни и редукторы конструкцией с прямым приводом. [2]
Бесщеточные двигатели находят применение в таких областях, как компьютерная периферия (дисководы, принтеры), ручные электроинструменты и транспортные средства, от моделей самолетов до автомобилей. В современных стиральных машинах бесщеточные двигатели постоянного тока позволили заменить резиновые ремни и редукторы конструкцией с прямым приводом. [2]
Энциклопедия YouTube
Бесколлекторный двигатель — Как они работают BLDC ESC PWM
Основы электроники № 18: двигатель постоянного тока и бесщеточный двигатель постоянного тока + ESC
ОГРОМНЫЙ бесщеточный двигатель, напечатанный на 3D-принтере | Я сделал мотор Кристофа Лаймера
.Типы двигателей, используемых в электромобилях | Конфигурация с одним, двумя, тремя и четырьмя двигателями в EV
Бесколлекторный двигатель постоянного тока Радиоуправляемый автомобильный тест Идеи двигателя постоянного тока
Исходная информация
Коллекторные двигатели постоянного тока были изобретены в 19 веке и до сих пор широко распространены. Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960-х годах. [3]
Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960-х годах. [3]
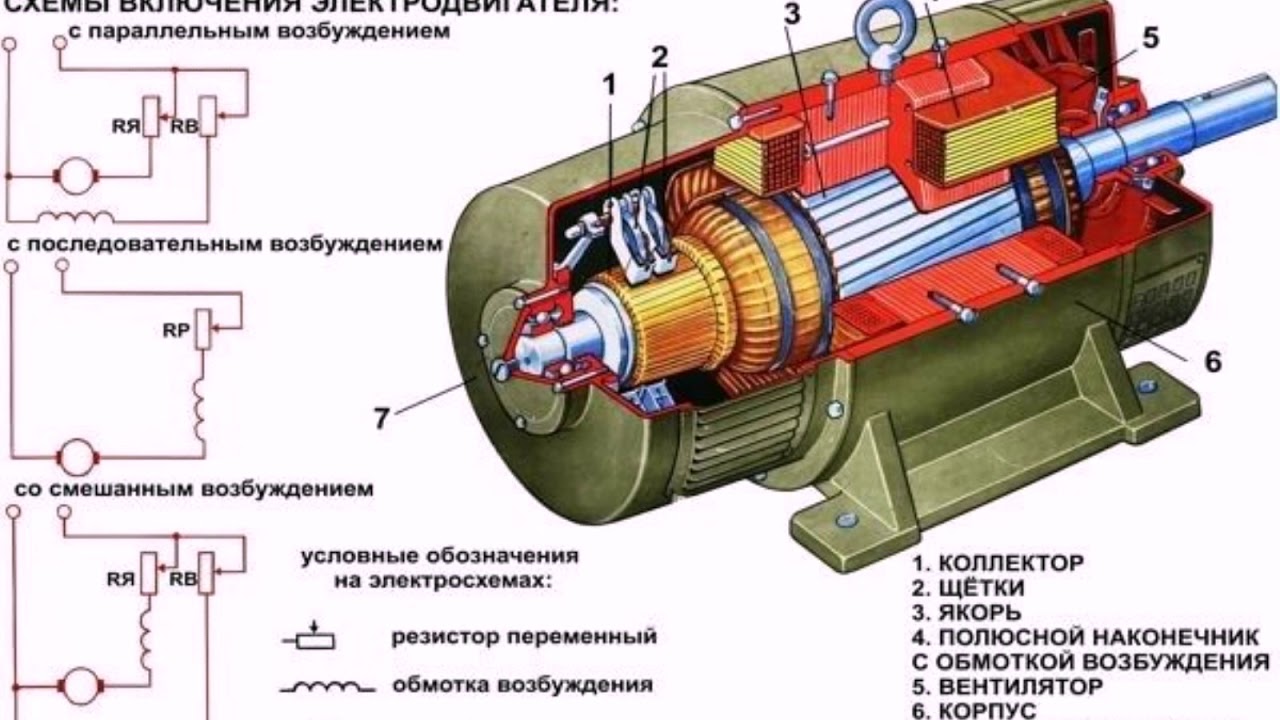
Электродвигатель развивает крутящий момент за счет смещения магнитных полей ротора (вращающаяся часть машины) и статора (неподвижная часть машины). Один или оба набора магнитов представляют собой электромагниты, состоящие из катушки проволоки, намотанной на железный сердечник. Постоянный ток, проходящий через проволочную обмотку, создает магнитное поле, обеспечивающее мощность, которая приводит в движение двигатель. Несоосность создает крутящий момент, который пытается выровнять поля. По мере того, как ротор движется и поля выравниваются, необходимо перемещать поле ротора или статора, чтобы поддерживать несоосность и продолжать генерировать крутящий момент и движение. Устройство, перемещающее поля в зависимости от положения ротора, называется коммутатором. [4] [5] [6]
Щеточный коллектор
В щеточных двигателях это делается с помощью поворотного переключателя на валу двигателя, называемого коллектором.![]() [4] [6] [5] Он состоит из вращающегося цилиндра или диска, разделенного на несколько металлических контактных сегментов на роторе. Сегменты соединены с токопроводящими обмотками ротора. Два или более стационарных контакта, называемых щетками , изготовленными из мягкого проводника, такого как графит, прижимаются к коммутатору, создавая скользящий электрический контакт с последовательными сегментами при вращении ротора. Щетки избирательно подают электрический ток на обмотки. Когда ротор вращается, коммутатор выбирает разные обмотки, и направленный ток подается на данную обмотку, так что магнитное поле ротора остается несогласованным со статором и создает крутящий момент в одном направлении.
[4] [6] [5] Он состоит из вращающегося цилиндра или диска, разделенного на несколько металлических контактных сегментов на роторе. Сегменты соединены с токопроводящими обмотками ротора. Два или более стационарных контакта, называемых щетками , изготовленными из мягкого проводника, такого как графит, прижимаются к коммутатору, создавая скользящий электрический контакт с последовательными сегментами при вращении ротора. Щетки избирательно подают электрический ток на обмотки. Когда ротор вращается, коммутатор выбирает разные обмотки, и направленный ток подается на данную обмотку, так что магнитное поле ротора остается несогласованным со статором и создает крутящий момент в одном направлении.
Недостатки коллектора
Недостатки коммутатора привели к сокращению использования коллекторных двигателей. Этими недостатками являются: [4] [6] [5]
- Трение щеток, скользящих по вращающимся сегментам коллектора, вызывает потери мощности, которые могут быть значительными в маломощном двигателе.

- Мягкий материал щетки изнашивается из-за трения, создавая пыль, и в конечном итоге щетки необходимо заменить. Это делает коммутируемые двигатели непригодными для приложений с низким содержанием твердых частиц или герметичных устройств, таких как двигатели с жестким диском, а также для приложений, требующих работы без обслуживания.
- Электрическое сопротивление контакта скользящей щетки вызывает падение напряжения в цепи двигателя, называемое падением напряжения на щетке , которое потребляет энергию.
- Многократное резкое переключение тока через индуктивность обмоток вызывает искрение на контактах коммутатора, что является пожароопасным во взрывоопасных средах и источником электронных помех, которые могут вызывать электромагнитные помехи в близлежащих микроэлектронных цепях.
За последние сто лет мощные щеточные двигатели постоянного тока, когда-то являвшиеся основой промышленности, были заменены синхронными двигателями переменного тока. Сегодня коллекторные двигатели используются только в маломощных приложениях или там, где доступен только постоянный ток, но указанные выше недостатки ограничивают их использование даже в этих приложениях.
Сегодня коллекторные двигатели используются только в маломощных приложениях или там, где доступен только постоянный ток, но указанные выше недостатки ограничивают их использование даже в этих приложениях.
Бесщеточное решение
В бесщеточных двигателях постоянного тока электронная сервосистема заменяет механические контакты коммутатора. [4] [6] [5] Электронный датчик определяет угол поворота ротора и управляет полупроводниковыми переключателями, такими как транзисторы, которые переключают ток через обмотки, изменяя направление тока или, в некоторых двигателях выключая его под правильным углом, чтобы электромагниты создавали крутящий момент в одном направлении. Устранение скользящего контакта позволяет бесщеточным двигателям иметь меньшее трение и более длительный срок службы; срок их службы ограничен только сроком службы подшипников.
Коллекторные двигатели постоянного тока развивают максимальный крутящий момент в стационарном состоянии, линейно уменьшающийся по мере увеличения скорости. [7] Некоторые ограничения щеточных двигателей можно преодолеть с помощью бесщеточных двигателей; они включают более высокую эффективность и более низкую подверженность механическому износу. Эти преимущества достигаются за счет потенциально менее прочной, более сложной и более дорогой управляющей электроники.
[7] Некоторые ограничения щеточных двигателей можно преодолеть с помощью бесщеточных двигателей; они включают более высокую эффективность и более низкую подверженность механическому износу. Эти преимущества достигаются за счет потенциально менее прочной, более сложной и более дорогой управляющей электроники.
Типичный бесщеточный двигатель имеет постоянные магниты, которые вращаются вокруг неподвижного якоря, что устраняет проблемы, связанные с подключением тока к движущемуся якорю. Электронный контроллер заменяет сборку коллектора коллекторного двигателя постоянного тока, который постоянно переключает фазу на обмотки, чтобы двигатель продолжал вращаться. Контроллер выполняет аналогичное синхронизированное распределение мощности, используя полупроводниковую схему, а не систему коммутатора.
Бесщеточные двигатели имеют ряд преимуществ по сравнению с щеточными двигателями постоянного тока, включая высокое отношение крутящего момента к весу, повышенную эффективность, обеспечивающую больший крутящий момент на ватт, повышенную надежность, сниженный уровень шума, более длительный срок службы за счет устранения эрозии щеток и коллектора, устранение ионизирующих искр от коллектора, и общее снижение электромагнитных помех (EMI). Без обмоток на роторе они не подвергаются центробежным силам, а поскольку обмотки поддерживаются корпусом, их можно охлаждать за счет теплопроводности, не требуя воздушного потока внутри двигателя для охлаждения. Это, в свою очередь, означает, что внутренние компоненты двигателя могут быть полностью закрыты и защищены от грязи и других посторонних веществ.
Без обмоток на роторе они не подвергаются центробежным силам, а поскольку обмотки поддерживаются корпусом, их можно охлаждать за счет теплопроводности, не требуя воздушного потока внутри двигателя для охлаждения. Это, в свою очередь, означает, что внутренние компоненты двигателя могут быть полностью закрыты и защищены от грязи и других посторонних веществ.
Коммутация бесколлекторного двигателя может быть реализована программно с использованием микроконтроллера или альтернативно с использованием аналоговых или цифровых схем. Коммутация с электроникой вместо щеток обеспечивает большую гибкость и возможности, недоступные для щеточных двигателей постоянного тока, включая ограничение скорости, микрошаговый режим для медленного и точного управления движением и удерживающий крутящий момент в неподвижном состоянии. Программное обеспечение контроллера можно настроить для конкретного двигателя, используемого в приложении, что повышает эффективность коммутации.
Максимальная мощность, которая может быть приложена к бесщеточному двигателю, ограничена почти исключительно теплом; [ необходима ссылка ] слишком много тепла ослабляет магниты и повреждает изоляцию обмоток.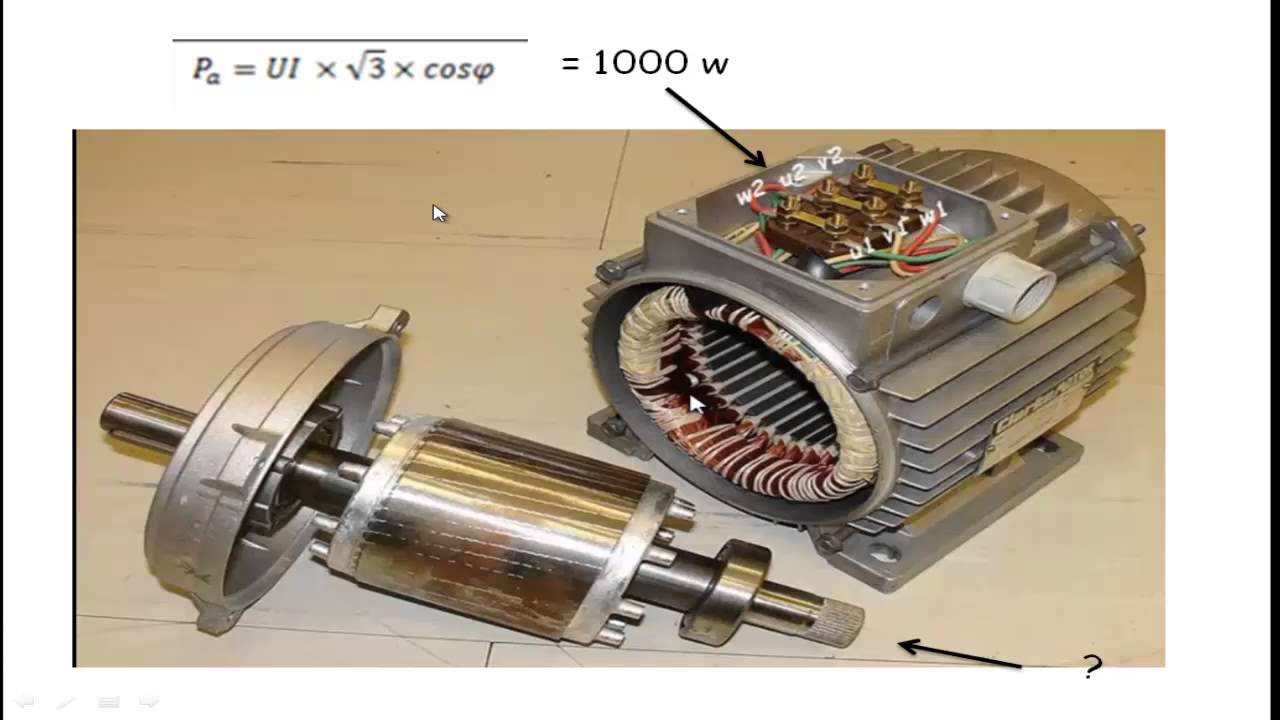
При преобразовании электроэнергии в механическую энергию бесщеточные двигатели более эффективны, чем щеточные, в первую очередь из-за отсутствия щеток, что снижает потери механической энергии из-за трения. Повышенная эффективность наиболее высока в областях холостого хода и малой нагрузки на кривой производительности двигателя. [8]
Окружающая среда и требования, в которых производители используют бесщеточные двигатели постоянного тока, включают работу без технического обслуживания, высокие скорости и работу, в которой искрообразование опасно (например, во взрывоопасных средах) или может повлиять на чувствительное к электронике оборудование.
Конструкция бесщеточного двигателя напоминает шаговый двигатель, но двигатели имеют важные отличия из-за различий в реализации и работе. В то время как шаговые двигатели часто останавливаются с ротором в определенном угловом положении, бесщеточный двигатель обычно предназначен для непрерывного вращения. Оба типа двигателей могут иметь датчик положения ротора для внутренней обратной связи. И шаговый двигатель, и хорошо спроектированный бесщеточный двигатель могут поддерживать конечный крутящий момент при нулевых оборотах.
И шаговый двигатель, и хорошо спроектированный бесщеточный двигатель могут поддерживать конечный крутящий момент при нулевых оборотах.
Реализации контроллера
Поскольку контроллер реализует традиционные функции щеток, ему необходимо знать ориентацию ротора относительно катушек статора. Это происходит автоматически в коллекторном двигателе из-за фиксированной геометрии вала ротора и щеток. В некоторых конструкциях используются датчики на эффекте Холла или поворотный энкодер для непосредственного измерения положения ротора. Другие измеряют противо-ЭДС в неуправляемых катушках, чтобы определить положение ротора, что устраняет необходимость в отдельных датчиках Холла. Поэтому их часто называют бессенсорные контроллеры .
Контроллеры, определяющие положение ротора на основе противо-ЭДС, имеют дополнительные проблемы при инициировании движения, поскольку при неподвижном роторе противо-ЭДС не создается. Обычно это достигается путем начала вращения с произвольной фазы, а затем перехода к правильной фазе, если она окажется неправильной. Это может привести к кратковременному вращению двигателя в обратном направлении, что еще больше усложнит последовательность запуска. Другие контроллеры без датчиков способны измерять насыщение обмотки, вызванное положением магнитов, для определения положения ротора. [ необходима ссылка ]
Это может привести к кратковременному вращению двигателя в обратном направлении, что еще больше усложнит последовательность запуска. Другие контроллеры без датчиков способны измерять насыщение обмотки, вызванное положением магнитов, для определения положения ротора. [ необходима ссылка ]
Типичный контроллер содержит три выхода с реверсивной полярностью, управляемые логической схемой. Простые контроллеры используют компараторы, работающие от датчиков ориентации, чтобы определить, когда выходная фаза должна быть увеличена. В более продвинутых контроллерах используется микроконтроллер для управления ускорением, скоростью двигателя и точной настройкой эффективности.
Двумя ключевыми параметрами производительности бесщеточных двигателей постоянного тока являются константы двигателя KT {\ displaystyle K_ {T}} (постоянная крутящего момента) и Ke {\ displaystyle K_ {e}} (постоянная противо-ЭДС, также известная как константа скорости KV = 1Ke{\displaystyle K_{V}={1 \over K_{e}}}). [9]
[9]
Варианты конструкции
Схема обмотки треугольником и звездой. (Это изображение не иллюстрирует индуктивные и генераторные свойства двигателя)
Бесщеточные двигатели могут иметь несколько различных физических конфигураций. В традиционной конфигурации внутреннего колеса постоянные магниты являются частью ротора. Три обмотки статора окружают ротор. В конфигурации с внешним ротором радиальное соотношение между катушками и магнитами меняется на противоположное; катушки статора образуют центр (сердечник) двигателя, а постоянные магниты вращаются внутри выступающего ротора, окружающего сердечник. Аутраннеры обычно имеют больше полюсов, собраны в тройки для обслуживания трех групп обмоток и имеют более высокий крутящий момент на низких оборотах. В плоском осевом потоке, используемом там, где есть ограничения по пространству или форме, пластины статора и ротора устанавливаются лицом к лицу. Во всех бесколлекторных двигателях катушки неподвижны.
Существуют две общие конфигурации электрических обмоток; конфигурация треугольника соединяет три обмотки друг с другом в треугольной цепи, и мощность подается на каждое из соединений. Конфигурация «звезда» ( Y ), иногда называемая звездообразной обмоткой, соединяет все обмотки с центральной точкой, а питание подается на оставшийся конец каждой обмотки. Двигатель с обмотками в конфигурации треугольника дает низкий крутящий момент на низкой скорости, но может развивать более высокую максимальную скорость. Конфигурация звездой обеспечивает высокий крутящий момент на низкой скорости, но не такую высокую максимальную скорость. Обмотка звездой обычно более эффективна. Обмотки, соединенные треугольником, могут позволить высокочастотным паразитным электрическим токам полностью циркулировать внутри двигателя. Обмотка, соединенная звездой, не содержит замкнутого контура, в котором могут протекать паразитные токи, что предотвращает такие потери. Помимо более высокого импеданса конфигурации «звезда», с точки зрения контроллера, две конфигурации обмоток можно рассматривать совершенно одинаково. [10]
Конфигурация «звезда» ( Y ), иногда называемая звездообразной обмоткой, соединяет все обмотки с центральной точкой, а питание подается на оставшийся конец каждой обмотки. Двигатель с обмотками в конфигурации треугольника дает низкий крутящий момент на низкой скорости, но может развивать более высокую максимальную скорость. Конфигурация звездой обеспечивает высокий крутящий момент на низкой скорости, но не такую высокую максимальную скорость. Обмотка звездой обычно более эффективна. Обмотки, соединенные треугольником, могут позволить высокочастотным паразитным электрическим токам полностью циркулировать внутри двигателя. Обмотка, соединенная звездой, не содержит замкнутого контура, в котором могут протекать паразитные токи, что предотвращает такие потери. Помимо более высокого импеданса конфигурации «звезда», с точки зрения контроллера, две конфигурации обмоток можно рассматривать совершенно одинаково. [10]
Применение
Четыре полюса на статоре однофазного бесщеточного двигателя с двумя обмотками. Это часть вентилятора охлаждения компьютера; ротор снят.
Это часть вентилятора охлаждения компьютера; ротор снят.
Бесщеточные двигатели выполняют многие функции, первоначально выполняемые коллекторными двигателями постоянного тока, но стоимость и сложность управления не позволяют бесщеточным двигателям полностью заменить коллекторные двигатели в самых дешевых областях. Тем не менее, бесщеточные двигатели стали доминировать во многих приложениях, особенно в таких устройствах, как компьютерные жесткие диски и проигрыватели компакт-дисков и DVD. Небольшие охлаждающие вентиляторы в электронном оборудовании приводятся в действие исключительно бесщеточными двигателями. Их можно найти в беспроводных электроинструментах, где повышенный КПД двигателя приводит к более длительному периоду использования без необходимости зарядки аккумулятора. Низкоскоростные бесщеточные двигатели малой мощности используются в проигрывателях с прямым приводом для грампластинок. [11]
Транспорт
Бесщеточные двигатели используются в электромобилях, гибридных транспортных средствах, личных транспортных средствах и электрических самолетах. [12] В большинстве электрических велосипедов используются бесщеточные двигатели, которые иногда встроены в саму ступицу колеса, при этом статор прочно закреплен на оси, а магниты прикреплены к колесу и вращаются вместе с ним. [13] Тот же принцип применяется в самобалансирующихся колесах самокатов. В большинстве радиоуправляемых моделей с электрическим приводом используются бесщеточные двигатели из-за их высокой эффективности.
[12] В большинстве электрических велосипедов используются бесщеточные двигатели, которые иногда встроены в саму ступицу колеса, при этом статор прочно закреплен на оси, а магниты прикреплены к колесу и вращаются вместе с ним. [13] Тот же принцип применяется в самобалансирующихся колесах самокатов. В большинстве радиоуправляемых моделей с электрическим приводом используются бесщеточные двигатели из-за их высокой эффективности.
Аккумуляторные инструменты
Бесщеточные двигатели используются во многих современных аккумуляторных инструментах, в том числе в некоторых струнных триммерах, воздуходувках, пилах (циркулярных и поршневых) и дрелях/шуруповертах. Преимущества бесщеточных двигателей в весе и эффективности по сравнению с щеточными двигателями более важны для ручных инструментов с батарейным питанием, чем для больших стационарных инструментов, подключенных к розетке переменного тока.
Отопление и вентиляция
В отраслях отопления, вентиляции и кондиционирования воздуха (HVAC) и холодильной промышленности существует тенденция использовать бесщеточные двигатели вместо различных типов двигателей переменного тока. Наиболее важной причиной перехода на бесщеточный двигатель является снижение мощности, необходимой для их работы, по сравнению с типичным двигателем переменного тока. [14] В дополнение к более высокой эффективности бесщеточного двигателя, в системах HVAC, особенно с переменной скоростью или модуляцией нагрузки, используются бесщеточные двигатели, обеспечивающие встроенному микропроцессору непрерывный контроль над охлаждением и потоком воздуха.
Наиболее важной причиной перехода на бесщеточный двигатель является снижение мощности, необходимой для их работы, по сравнению с типичным двигателем переменного тока. [14] В дополнение к более высокой эффективности бесщеточного двигателя, в системах HVAC, особенно с переменной скоростью или модуляцией нагрузки, используются бесщеточные двигатели, обеспечивающие встроенному микропроцессору непрерывный контроль над охлаждением и потоком воздуха.
Промышленное проектирование
Применение бесщеточных двигателей постоянного тока в промышленном инжиниринге в первую очередь сосредоточено на проектировании производства или промышленной автоматизации. Бесщеточные двигатели идеально подходят для производственных применений благодаря их высокой удельной мощности, хорошим характеристикам скорости и крутящего момента, высокой эффективности, широкому диапазону скоростей и простоте обслуживания. Наиболее распространенными видами применения бесщеточных двигателей постоянного тока в промышленном машиностроении являются управление движением, линейные приводы, серводвигатели, приводы для промышленных роботов, приводные двигатели экструдеров и приводы подачи для станков с ЧПУ. [15]
[15]
Бесщеточные двигатели обычно используются в качестве приводов насосов, вентиляторов и шпинделей в устройствах с регулируемой или переменной скоростью, поскольку они способны развивать высокий крутящий момент с хорошей реакцией на скорость. Кроме того, их можно легко автоматизировать для дистанционного управления. Благодаря своей конструкции они обладают хорошими тепловыми характеристиками и высокой энергоэффективностью. [16] Для получения переменной скорости бесщеточные двигатели работают в электромеханической системе, которая включает электронный контроллер двигателя и датчик обратной связи по положению ротора. [17] Бесщеточные двигатели постоянного тока широко используются в качестве серводвигателей для сервоприводов станков. Серводвигатели используются для механического перемещения, позиционирования или точного управления движением. Шаговые двигатели постоянного тока также можно использовать в качестве серводвигателей; однако, поскольку они работают с управлением без обратной связи, они обычно демонстрируют пульсации крутящего момента. [18]
[18]
Бесщеточные двигатели используются в промышленных приложениях позиционирования и управления. [19] Для сборочных роботов, [20] Бесщеточные технологии могут быть использованы для создания линейных двигателей. [21] Преимущество линейных двигателей заключается в том, что они могут производить линейное движение без необходимости использования системы передачи, такой как шарико-винтовая передача, ходовой винт, зубчатая рейка, кулачок, шестерни или ремни, которые были бы необходимы для вращательных двигателей. . Известно, что системы передачи обеспечивают меньшую отзывчивость и меньшую точность. Бесщеточные линейные двигатели постоянного тока с прямым приводом состоят из статора с прорезями и магнитными зубьями и подвижного привода с постоянными магнитами и катушками. Чтобы получить линейное движение, контроллер двигателя возбуждает обмотки катушки в приводе, вызывая взаимодействие магнитных полей, что приводит к линейному движению. [15] Трубчатые линейные двигатели представляют собой другую форму конструкции линейного двигателя, работающую аналогичным образом.
[15] Трубчатые линейные двигатели представляют собой другую форму конструкции линейного двигателя, работающую аналогичным образом.
Авиамоделирование
Электродвигатель постоянного тока с микропроцессорным управлением, приводящий в движение радиоуправляемый микросамолет. Этот двигатель с внешним ротором весит 5 г и потребляет около 11 Вт.
Бесколлекторные двигатели стали популярным выбором двигателей для моделей самолетов, включая вертолеты и дроны. Их выгодное соотношение мощности к весу и широкий диапазон доступных размеров произвели революцию на рынке летных моделей с электрическим приводом, вытеснив практически все щеточные электродвигатели, за исключением маломощных недорогих, часто игрушечных самолетов. [ citation need ] Они также поощряли рост простых, легких электрических моделей самолетов, вместо прежних двигателей внутреннего сгорания, приводивших в действие более крупные и тяжелые модели. Повышенное отношение мощности к весу современных аккумуляторов и бесколлекторных двигателей позволяет моделям подниматься вертикально, а не постепенно. Низкий уровень шума и небольшая масса по сравнению с небольшими двигателями внутреннего сгорания, работающими на калильном топливе, являются еще одной причиной их популярности.
Низкий уровень шума и небольшая масса по сравнению с небольшими двигателями внутреннего сгорания, работающими на калильном топливе, являются еще одной причиной их популярности.
Законодательные ограничения на использование моделей самолетов с двигателем внутреннего сгорания в некоторых странах, [ citation need ] чаще всего из-за возможности шумового загрязнения — даже с учетом специально разработанных глушителей почти для всех моделей двигателей, доступных в последние десятилетия — также поддержали переход на мощные электрические системы.
Радиоуправляемые автомобили
Их популярность также возросла в области радиоуправляемых (RC) автомобилей. Бесщеточные двигатели разрешены для участия в гонках на радиоуправляемых автомобилях в Северной Америке в соответствии с Законом о радиоуправляемых автогонках (ROAR) с 2006 года. -Po) или литий железо фосфатных (LiFePO4) батарей, эти автомобили могут развивать скорость более 160 километров в час (99 миль в час). [22]
[22]
Бесщеточные двигатели способны развивать больший крутящий момент и имеют более высокую пиковую скорость вращения по сравнению с двигателями, работающими на нитро- или бензиновых двигателях. Пиковая скорость двигателей Nitro составляет около 46 800 об/мин и мощность 2,2 киловатта (3,0 л.с.), тогда как бесщеточный двигатель меньшего размера может достигать 50 000 об/мин и мощности 3,7 киловатта (5,0 л.с.). Более крупные бесщеточные двигатели RC могут развивать мощность до 10 киловатт (13 л.с.) и скорость 28 000 об/мин для питания моделей в масштабе одной пятой. [ цитата необходима ]
9 Бобби Бернштейн (15 января 2015 г.). «Топ 4 Самые быстрые RC автомобили для продажи в мире» . Heavy.com . Проверено 2 февраля 2015 года .Что касается самого быстрого радиоуправляемого автомобиля, доступного для продажи, это суперкар Traxxas XO-1. XO-1 развивает скорость до 100 миль в час с подходящими батареями LiPos.В спецификациях производителя указано использование бесщеточного двигателя Traxxas Big Block
Дополнительная литература
- Яцек Ф. Гиерас; Митчелл Уинг (2002), Технология двигателя с постоянными магнитами: конструкция и применение , CRC Press, ISBN 9780824743949
- Кришнан Раму (2009), Синхронные и бесщеточные двигатели постоянного тока с постоянными магнитами , CRC Press, ISBN 9781420014235
- Howard E. Jordan (1994), Энергоэффективные электрические двигатели и их применение , Springer, ISBN 9780306446986
- Бобби А. Бэсшем (2003), Оценка электрических двигателей для корабельных двигателей , Военно-морская аспирантура, архивировано из оригинала 8 апреля 2013 г.
- Duane Hanselman (2012), Бесщеточные двигатели: Магнитные дизайн, производительность и управление , E-Man Press, ISBN 9780982692615
 Гиерас; Митчелл Уинг (2002), Технология двигателя с постоянными магнитами: конструкция и применение , CRC Press, ISBN 9780824743949
Гиерас; Митчелл Уинг (2002), Технология двигателя с постоянными магнитами: конструкция и применение , CRC Press, ISBN 9780824743949 Внешние ссылки
- Как Двигатели Работа (щеточные и бесщеточные RC двигатели для самолетов) в Wayback Machine (архивировано 2 октября 2013 г.
