
классификация и области применения двигателей
В данной статье расскажем про двигатели переменного тока, их главное отличие от двигателей постоянного тока. Рассмотрим классификацию таких двигателей и подробно разберем области применения различных двигателей переменного тока.
Вступление
Мы все знаем, что без электричества мы не можем выполнять свою работу. Если мы посмотрим на мир, в котором мы живем, то основное развитие технологий и цивилизации произошло только после введения электричества и электрических устройств. Можем ли мы представить себе жизнь без кондиционеров / потолочных вентиляторов, светильников, компьютеров и устройств связи и многого другого.
Поэтому совершенно очевидно, что электричество и электрооборудование играют жизненно важную роль в каждом дюйме нашей жизни. Одним из таких устройств, которое создало гигантский скачок для человечества как в бытовом, так и в промышленном секторах, является «Мотор». Использование двигателей переменного тока намного более распространено, чем двигателей постоянного тока, по нескольким практическим причинам, которые мы узнаем позже.

Двигатели переменного тока играют очень важную роль в повседневной жизни, начиная от перекачивания воды в верхний резервуар и заканчивая маневренным рычагом современного робота. Основным фактором, который приводит к принятию и широкому использованию в различных областях, является его гибкость и его огромное разнообразие, которое может соответствовать практически любому спросу. Чтобы узнать, какие существуют различные типы двигателей ACM, которые идеально соответствуют их потребностям, крайне важно знать о различных классификациях двигателей ACM.
Типы двигателей переменного тока
Классификация основана на принципе действия.
- Классификация на основе принципа действия :
(а) Синхронные двигатели.
- С обмоткой возбуждения;
- С постоянными магнитами;
- Реактивный;
- Гистерезисный;
- Шаговый.
(б) Асинхронные двигатели.
- Индукционные двигатели;
- Коммутирующие двигатели.
- Классификация на основе типа тока:
- Однофазный;
- Двухфазный;
- Трехфазный.
- Классификация на основе скорости работы:
- Постоянная скорость;
- Переменная скорость;
- регулируемая скорость.
- Классификация на основе структурных особенностей:
- Открытый;
- Закрытый;
- Полузакрытый;
- Вентилируемый.
Описание электро двигателей переменного тока
1. Синхронные двигатели и их использование : эти двигатели имеют ротор (который подключен к нагрузке), вращающийся с той же скоростью, что и скорость вращения тока статора. Другими словами, мы можем сказать, что эти двигатели не имеют скольжения по току статора. Иногда они используются не для управления нагрузкой, а вместо этого действуют как «синхронный конденсатор», чтобы улучшить коэффициент мощности локальной сети, к которой она подключена. Эти типы двигателей используются даже в высокоточных устройствах позиционирования, таких как современные роботы. Они также могут действовать как шаговые двигатели.

2. Асинхронные двигатели и их применение. Эти типы двигателей, как правило, используются в повседневной жизни, от перекачивания воды через верхний резервуар до питательных насосов котлов электростанции. Эти двигатели очень гибки в использовании и соответствуют нагрузке практически на все.
Асинхронные двигатели очень важны для многих отраслей промышленности благодаря их несущей способности и гибкости. Эти двигатели, в отличие от синхронных двигателей, проскальзывают по сравнению с полем тока статора. Они обычно используются для различных типов насосов , компрессоров и действуют как главные двигатели для многих машин.

3. Однофазные и трехфазные двигатели и их использование. Двигатели переменного тока могут найти применение в двух формах в зависимости от источника питания. Однофазные двигатели, как правило, находят свое применение в требованиях с низким энергопотреблением / бытовых приборах, таких как потолочные вентиляторы, измельчители смесителей, переносные электроинструменты и т.д. Трехфазные двигатели, как правило, используются для высоких требований к мощности, таких как силовые приводы для компрессоров , гидравлических насосов, систем кондиционирования воздуха, ирригационные насосы и многое другое.

4. Двигатели с постоянной, переменной и регулируемой скоростью. Как уже говорилось, двигатели переменного тока очень гибки во многих отношениях, включая управление скоростью. Существуют двигатели, которые должны работать с постоянной скоростью для воздушных компрессоров. Определенные насосы охлаждения воды, приводимые в действие электродвигателями, могут работать на двух или трех скоростях, просто переключая количество используемых полюсов. Если число полюсов изменяется, скорость также изменяется. Они лучше всего подходят для насосов охлаждения морской воды в морских машинных отделениях и на многих электростанциях. Скорость двигателей также может непрерывно изменяться некоторыми электронными устройствами, таким образом, это может подходить для определенных применений, таких как судовой грузовой насос, скорость разгрузки которого должна быть снижена в соответствии с требованием терминалов.
5. Двигатели с изменяемой структурой . Эти типы двигателей имеют различную компоновку внешней клетки, в зависимости от использования или каких-либо специальных промышленных требований. Для двигателей, используемых в газовых и масляных клеммах, корпус должен быть «искробезопасным», поэтому он может иметь закрытый корпус или вентилируемое трубопроводное устройство, чтобы искры, возникающие внутри двигателя, не вызывали возгорания снаружи. Также многие двигатели полностью закрыты, так как они могут быть уязвимыми для погодных условий, как те, которые используются на гидроэлектростанциях.
Электродвигатель переменного тока — это… Что такое Электродвигатель переменного тока?
- Электродвигатель переменного тока
-

Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу)
Электрический двигатель — это, электрическая машина, в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Классификация электродвигателей
- Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током, имеет две разновидности:
- Шаговые двигатели — Электродвигатели, которые имеют конечное число положений ротора. Заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие.
Из-за связи с низкой частотой сети (50 Герц) асинхронные и синхронные двигатели имеют больший вес и размеры, чем коллекторный двигатель постоянного тока и универсальный коллекторный двигатель той же мощности. При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Ссылки

Wikimedia Foundation. 2010.
- Электродвигатель, завод
- Электрогитарист
Смотреть что такое «Электродвигатель переменного тока» в других словарях:
электродвигатель переменного тока — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN ас motor … Справочник технического переводчика
Электродвигатель постоянного тока — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Переменного тока электродвигатель — машина переменного тока, предназначенная для работы в режиме двигателя (см. Переменного тока машина). П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяют в… … Большая советская энциклопедия
Переменного тока машина — электрическая машина, применяемая для получения переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) либо в электрическую энергию другого напряжения или частоты (преобразователь) П. т. м.… … Большая советская энциклопедия
ПЕРЕМЕННОГО ТОКА ЭЛЕКТРОДВИГАТЕЛЬ — машина перем. тока, предназнач. для работы в режиме двигателя. П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели применяют в электроприводах в осн. тогда, когда требуется постоянство угловой скорости. Из асинхронных… … Большой энциклопедический политехнический словарь
электропривод переменного тока — электропривод постоянного [переменного] тока Электропривод, содержащий электродвигатель постоянного [переменного] тока. [ГОСТ Р 50369 92] Тематики электропривод EN ac drivealternating current drive DE Wechselstromantrieb … Справочник технического переводчика
электропривод постоянного (переменного) тока
ЭЛЕКТРОДВИГАТЕЛЬ — (электрический двигатель) машина, преобразующая подводимую внешнюю электрическую энергию в механическую, обычно энергию вращения. Э. имеют в общих чертах то же устройство, что и генераторы (см. ), но основаны на обратном принципе действия.… … Большая политехническая энциклопедия
ЭЛЕКТРОДВИГАТЕЛЬ, ЭЛЕКТРОМОТОР — (Electric motor) электрическая машина, служащая для преобразования подводимой к ней извне электрической энергии в механическую. Различают Э. постоянного тока и переменного тока. Э. постоянного тока бывают с последовательным возбуждением,… … Морской словарь
ЭЛЕКТРОДВИГАТЕЛЬ — электромотор, машина, преобразующая получаемую ею электр. энергию в механическую. Большинство Э. не отличается по конструкции от электр. генераторов (см. Генератор электрический), к рые при использовании их в качестве Э. не приводятся во вращение … Технический железнодорожный словарь
Появление электродвигателей переменного тока — Control Engineering Russia

АЛЕКСАНДР МИКЕРОВ, д. т. н., проф. каф. систем автоматического управления СПбГЭТУ «ЛЭТИ»
В предыдущих статьях [1, 2] описывались первые электрические двигатели с питанием от гальванических батарей. Однако во второй половине XIX века в связи с развитием электрического освещения и дальней передачи электроэнергии появились сети однофазного переменного тока [3]. Это и дало толчок к изобретению электродвигателей переменного тока.

Рис. 1. Двигатель Уитстона
Первый однофазный двигатель был предложен в 1841 г. английским физиком Чарльзом Уитстоном (Charles Wheatstone), известным также своими изобретениями в области электрогенераторов и измерительной техники. Такой двигатель подключается к источнику переменного тока и содержит (рис. 1) статор с шестью электромагнитами (1) и ротор (2) в виде медного диска с тремя подковообразными магнитами (3) полярностью N и S.
Все электромагниты включены последовательно так, что при любой полярности питающего напряжения в промежутках между ними формируются магнитные потоки или полюса чередующейся полярности n и s, показанные на рис. 1 в начальный момент времени t

Рис. 2. Векторная диаграмма двигателя
Магнитное поле статора такого двигателя можно изобразить в виде вектора (рис. 2), где Ф1, Ф2,… Ф6 — магнитные потоки статора, взаимодействующие с ротором в последовательные моменты времени t1, t2, … t6, когда питающее напряжение меняет свой знак. Получается, что вектор магнитного потока статора шагает по окружности синхронно с ротором, поэтому такое магнитное поле можно назвать шагающим.
При реальных частотах сети 50–60 Гц такой двигатель, конечно, запуститься не сможет, но если его ротор раскрутить, например, вручную или другим двигателем до синхронной скорости, то он будет устойчиво работать с частотой вращения, пропорциональной частоте сети. При электрификации Лондона посредством однофазного напряжения в 1889 г. в качестве такого «раскруточного» двигателя применили так называемый универсальный двигатель (рис. 3) с обмотками якоря (1) и возбуждения (2). Его конструкция была разработана в 1884–85 гг. независимо друг от друга Вернером Сименсом и соавторами трансформатора, венгерскими инженерами Микша Дери и Отто Блати [4–6].

Рис. 3. Универсальный двигатель
Универсальные двигатели до сих пор широко применяются при мощности до нескольких киловатт, особенно в бытовой технике. Они привлекают производителей легкостью изменения скорости с помощью регулирования напряжения, как в обычном двигателе постоянного тока. Однако для мощных приводов такое регулирование было в то время затруднительным. Поэтому для электрической тяги на железных дорогах и в лифтах с питанием от сети переменного тока стали применять так называемый репульсионный двигатель, изобретенный в 1885 г. знаменитым американским электротехником Илайю Томсоном (Elihu Thomson) и усовершенствованный позднее Микша Дери [3, 5, 6].

Рис. 4. Репульсионный двигатель
Илайю Томсон (1853–1937), родом из Англии, соединял в себе таланты блестящего университетского профессора, крупного инженера, плодовитого изобретателя (696 патентов) и успешного предпринимателя [7]. Он разработал различные системы электрического освещения, высокочастотные генератор и трансформатор, самопишущий ваттметр, один из способов электросварки, а также, например, улучшил рентгеновские трубки. Томсон основал электротехнические компании в Англии, Франции и США. В 1892 г. его компания Thomson–Houston слилась с компанией Эдисона, образовав крупнейшую электротехническую компанию мира — General Electric.
По конструкции репульсионный двигатель, схема которого показана на рис. 4, похож на универсальный двигатель с якорем (1) и возбуждением в виде электромагнита (2). Отличие состоит в том, что щетки двигателя (3) закорочены и могут вручную поворачиваться [8]. При питании переменным напряжением в закороченной обмотке якоря наводится ЭДС и идет ток, направление которого, в соответствии с законом Ленца, таково, что создаваемый им поток противодействует магнитному потоку статора.
Тогда, если в некоторый полупериод питающего напряжения электромагнит (2) имеет полюс N внизу, то якорь (1) — такой же полюс наверху, как показано на рис. 4, что приведет к их взаимному отталкиванию и вращению ротора по часовой стрелке. Это и объясняет название двигателя, которое в дословном переводе означает «отталкивающийся». При этом величина наводимой ЭДС, а значит, и вращающего момента определяются положением щеток. Когда они горизонтальны, ЭДС и момент максимальны (режим пуска). Далее при повороте щеток против часовой стрелки момент будет падать, а скорость нарастать. Таким образом, пуск и скорость репульсионного двигателя легко регулируются разворотом щеток без изменения напряжения питания.
Тем не менее проблемы всех коллекторных двигателей, связанные с искрением, помехами и быстрым износом, были решены лишь после создания асинхронного двигателя. По своему устройству он гораздо проще любого двигателя постоянного тока, поэтому удивительно, что он был изобретен почти на полстолетия позже, несмотря на то, что, как отмечал Илайю Томсон: «Трудно составить такую комбинацию из магнитов переменного тока и кусков меди, которая не имела бы тенденции к вращению» [5].

Рис. 5. Галилео Феррарис (1847–1897)
Асинхронный двигатель базируется на концепции вращающегося магнитного поля, выдвинутой практически одновременно в середине 1880-х гг. двумя выдающимися учеными — Николой Теслой [3] и итальянским профессором физики Галилео Феррарисом (Galileo Ferraris) (рис. 5). Последний родился на севере Италии в семье фармацевта и после окончания Туринского университета стал профессором Музея индустрии, где изучал трансформаторы, многофазные цепи, линии передачи переменного тока, а также оптические приборы. Он прожил короткую жизнь, но успел заслужить в Европе звание «отца трехфазного тока» [5, 9, 10].
Если вернуться к концепции, то во вращающемся магнитном поле вектор магнитного потока статора постоянен по величине, но, в отличие от шагающего поля (рис. 2), непрерывно (равномерно) вращается с синхронной скоростью. Тогда очевидно, что ротор в виде магнита, помещенный внутри такого поля, будет вовлекаться им в синхронное вращение, что и происходит в рассмотренном выше двигателе Уитстона. Однако выяснилось, что аналогично будет вращаться и немагнитный ротор из любого проводящего металла. Еще в 1824 г. известный французский физик академик Доминик Араго (Dominique Arago) продемонстрировал опыт, названный им «магнетизмом вращения» [5] и показанный на рис. 6.

Рис. 6. Опыт Араго
Диск (1) из меди или стали на стеклянной пластине (2) вращался в том же направлении, что и вращающийся магнит (3). Объяснение этому загадочному явлению нашел Майкл Фарадей в 1831 г. после открытия закона электромагнитной индукции (закона Фарадея). Согласно ему, вращающееся магнитное поле магнита индуцирует в диске вихревые токи, создающие собственное магнитное поле, взаимодействующее с вращающимся.

Рис. 7. Опыт Бейли
Этот принцип и лежит в основе современных асинхронных двигателей (в английской литературе — индукционных), имеющих металлический ротор и отличающихся только тем, что в них вращающееся магнитное поле образуется неподвижной обмоткой статора. Первый шаг к созданию такого двигателя был сделан английским физиком Уолтером Бейли (Walter Bailey) в 1879 г., заменившим в опыте Араго вращающийся магнит на четыре электромагнита (2–5), токи в которых переключались последовательно вручную (рис. 7) [5, 10]. Но такое устройство создавало шагающее через 90o магнитное поле. А как получить непрерывно (равномерно) вращающееся магнитное поле?
На этот вопрос ответил вышеупомянутый Феррарис в 1888 г. в докладе Туринской академии наук, математически сформулировав два условия [5, 10]:
- Обмотка двигателя должна содержать две независимые части (называемые теперь фазами), магнитные потоки которых геометрически взаимно перпендикулярны.
- Фазы должны быть запитаны двумя гармоническими напряжениями, сдвинутыми на четверть периода (синус и косинус).
Позднее Михаил Осипович Доливо-Добровольский предложил называть такую систему токов Drehstrom, что в дословном переводе с немецкого означает «вращательный ток» [6].

Рис. 8. Двухфазный двигатель Феррариса
Свою теорию Феррарис блестяще подтвердил макетом двигателя мощностью 3 Вт (рис. 8), имеющего ротор (1) в виде полого медного стаканчика и статор (2) с фазами A и B. Фазы разделены на две секции с разным числом витков, намотанных проводом разного диаметра так, чтобы создавать индуктивный сдвиг фаз токов в 90° при питании от однофазной сети.
В 1890 г. французские инженеры Морис Хитин (Maurice Hutin) и Морис Леблан (Maurice Leblanc) предложили использовать для сдвига фаз токов конденсатор [6]. В таком виде двухфазный двигатель дожил до наших дней под названием конденсаторного двигателя. При этом габариты конденсатора соизмеримы с размерами самого двигателя, поэтому данное техническое решение пригодно только для маломощных двигателей.
Сам Феррарис также заявлял, что «…аппарат, основанный на исследованном нами принципе, не может иметь никакого промышленного значения как двигатель» [10]. Поэтому он его не запатентовал (как, впрочем, и остальные свои открытия) и отклонил, в отличие от Теслы, предложение Вестингауза о сотрудничестве. Тем не менее его работы дали впоследствии повод оспаривать патенты Теслы в некоторых из 25 судебных процессов компании Вестингауза [5, 9]. Пессимистический вывод о перспективах своего двигателя Феррарис сделал, оценив величину его КПД в точке максимума мощности на валу — ниже 50%. Однако в данной точке это справедливо и для двигателей постоянного тока. Поэтому в дальнейшем рабочие точки стали выбирать ближе к скорости холостого хода, где в идеале КПД любого электродвигателя стремится к 100%.

Рис. 9. Двигатель Теслы
Совершенно по другому пути пошел Тесла, предложив в 1887 г. многофазные системы, где сдвинутые напряжения питания фаз вырабатывались питающим генератором, как показано, например, на рис. 9, где: 1 — генератор, 2 — двухфазный двигатель, 3 — контактные кольца генератора, 4 — обмотка ротора (кольца двигателя не показаны) [5, 10].
При положении переключателя ON ротор запитывается постоянным напряжением, и это двухфазный синхронный двигатель с электромагнитным возбуждением. В положении OFF обмотка ротора закорачивается, и получается асинхронный двигатель, названный Теслой индукционным. Эксперт патентного ведомства поначалу не поверил в работоспособность такого странного двигателя, пока Тесла не продемонстрировал ему действующий макет (рис. 10).

Рис. 10. Макет двигателя Теслы
Двигатели Теслы и Феррариса легко запускались от питающей сети, однако с увеличением нагрузки их скорость падала, что подтверждается принципиальным отличием асинхронного двигателя от синхронного. Действительно, асинхронный двигатель развивает вращающий момент лишь при наличии тока, а следовательно, и ЭДС, индуцируемой в роторе. А, по закону Фарадея, это возможно лишь тогда, когда ротор пересекает силовые линии поля статора, т. е. когда скорости их вращения не одинаковы (не синхронны).
Как описано в статье [3], Тесла вместе с Вестингаузом начали активно внедрять асинхронные двигатели в жизнь, однако они были доведены до совершенства и приняли современный вид лишь благодаря трудам нашего соотечественника Михаила Осиповича Доливо-Добровольского, которые будут рассмотрены в следующих статьях.
Что касается многофазных синхронных двигателей, то они нашли широкое применение там, где требуется стабильная скорость вращения, например в компрессорах, приводах генераторов и т. д. Синхронные двигатели с постоянными магнитами входят в состав современных вентильных двигателей, создающих все большую конкуренцию пока еще наиболее распространенным электродвигателям постоянного тока.
Потребность в двигателях переменного тока возникла при внедрении однофазных осветительных сетей. Первым стал синхронный двигатель Уитстона с постоянными магнитами (1841 г.).
Однако такие двигатели не имели пускового момента, поэтому на практике применялись универсальные двигатели Сименса и репульсионные двигатели Томсона (1884-5 гг).
Достаточно мощные двигатели для промышленности были созданы только в середине 1880-х гг., после того как концепция вращающегося магнитного поля была математически сформулирована Феррарисом и реализована в многофазных синхронных и асинхронных двигателях Теслы, запущенных в производство на заводах Вестингауза.
Вконтакте
Google+
Что такое электродвигатель
Электрический двигатель (электродвигатель) является устройством для преобразования электрической энергии в механическую и приведения в движение машин и механизмов. Электродвигатель – главный и обязательный (но не единственный) элемент электропривода.
Первые электродвигатели были изобретены еще в первой ХІХ ст., а с конца того же столетия стали получать все большее распространение. Современные промышленность, транспорт, коммунальное хозяйство, быт уже невозможно представить без электрических двигателей.
Преобладающее большинство электрических двигателей являются двигателями вращательного движения (рис. 1). Они состоят из неподвижной части (статора) и подвижной (ротора). Ротор начинает вращаться после подачи питания к обмоткам двигателя. Однако для ряда механизмов, выполняющих поступательное или возвратно-поступательное движение (суппорты и столы металлорежущих станков, некоторые транспортные средства), с целью упрощения конструкции механической части электропривода иногда используют линейные двигатели. Подвижная часть таких двигателей (вторичный элемент или бегун) осуществляет линейное перемещение (рис. 2).
В зависимости от рода электрического тока, применяемого для питания электродвигателей, различают двигатели постоянного и переменного тока.
Рис. 1 Электродвигатели вращательного движения
Рис. 2 Линейный электродвигатель: 1 – статор, 2 – подвод питания, 3 – бегун
Принцип действия любого электродвигателя основывается на взаимодействии магнитных полей. Если приблизить один магнит к другому, то разноименные их полюса будут притягиваться друг к другу, а одноименные – отталкиваться. В двигателе роль по крайней мере одного из магнитов играет катушка с током (то есть электромагнит). Известно, протекание по проводнику электрического тока вызывает появления магнитного поля вокруг проводника (рис. 3). Это поле имеет коаксиальный характер, а направление его магнитных силовых линий можно определить с помощью «правила буравчика». В соответствии с этим правилом, если буравчик закручивать в проводник таким образом, чтобы направление поступательного движения буравчика совпадало с направлением тока в проводнике, то направление вращения буравчика покажет направление магнитных силовых линий поля (стрелки на рис. 3).
Рис. 3 Возникновение магнитного поля проводника с током
На рис. 4 показан поперечный разрез проводника. Внутри разреза условно показано направление тока: крест («хвост» стрелки тока) – ток от зрителя (рис. 4а), точка («острие» стрелки тока) – ток на зрителя (рис. 4б). Из рис. 4в, г видно, что магнитное поле замкнутой рамки (кольца) с током подобно магнитному полю постоянного магнита (силовые линии выходят из северного полюса и входят в южный). Таким образом, рамка с током представляет собой элементарный электромагнит.
Рис. 4 Магнитные силовые линии проводников с током: а – ток от зрителя, б – ток на зрителя, в – рамка с током, г – силовые линии рамки (кольца) с током
Электрические двигатели переменного тока
К двигателям переменного тока относятся синхронные, шаговые (разновидность синхронных) и асинхронные двигатели. Их объединяет то, что по их обмоткам обмотками протекают знакопеременные токи, а питаются они от источников знакопеременного напряжения.
Статор электродвигателей переменного тока представляет из себя сердечник (магнитопровод) из листов специальной электротехнической стали, в котором сделаны отверстия (пазы) для размещения обмотки (фрагмент магнитопровода статора показан на рис. 5). Обмотка состоит из отдельных секций (катушек, рамок). Внутри статора на подшипниках помещен ротор, способный свободно вращаться вокруг своей оси.
Рис. 5 Магнитопровод статора двигателя переменного тока
На рис. 6 схематично показан поперечный разрез статора и ротора. На противоположных сторонах статора в двух пазах размещены проводники элементарной катушки обмотки. Эта катушка выглядит так, как на рис. 4в и к ней можно подати напряжение от постороннего источника с той или другой полярностью (как на рис. 4в). На роторе располагается постоянный магнит (полюса Nr и Sr). Если к обмотке статора подать постоянный ток такого направления, как показано на рис. 6а, возникает магнитное поле статора с полюсами Ns и Ss. Ротор поворачивается по часовой стрелке, чтобы совместить противоположные полюса полей ротора и статора (окончательное положение ротора показано штриховой линией). Если полярность тока статора противоположна (рис. 6б), полюса статора поменяются местами, а ротор будет поворачиваться в противоположном направлении.
Рис. 6 Взаимодействие магнитных полей статора и ротора
Чтобы обеспечить непрерывное вращение ротора, на статоре размещают несколько отдельных обмоток, питаемых от отдельных источников. На рис. 7 показан поперечный разрез двигателя с тремя обмотками статора (красная А, синяя В, зеленая С). Подобный двигатель называется трехфазным, а его обмотки – фазными. Обмотки представляют собой элементарные рамки из проводника (как на рис. 4в), сдвинутые в пространстве на 120 градусов друг относительно друга. На рис. 7 ток протекает только по обмоткам со значками точки и крестика.
Рис. 7 Принцип действия синхронного двигателя
Если подать ток к обмотке А так, как показано на рис. 7а, магнитная ось поля статора займет горизонтальное положение, а южный полюс поля ротора после его поворота совместится с северным полюсом поля статора. Протекание тока по обмотке С приведет к повороту магнитной оси статора (а за ним – ротора) на 60 по часовой стрелке (рис. 7б). Затем ток подается в обмотку В (рис. 7в). После этого ток протекает по обмоткам А, С, В, но в противоположном направлении (сравните рис. 7а и 7г, 7б и 7д, 7в и 7е). С каждым переключение обмоток магнитная ось статора, а за нею – и ротор будут поворачиваться на следующие 60 градусов. Если после очередного переключения тока в обмотках продлить протекание тока в последней обмотке, ротор останется неподвижным. Именно таким есть принцип действия шагового двигателя. Такие двигатели используют для дозированного поворота вала механизма на заданный угол (например, в электромеханических часах и принтерах). Изменить направление вращения ротора можно, изменив порядок подключения обмоток к положительному полюсу источника (А-С-В вместо А-В-С).
Подавая попеременно ток в фазные обмотки (рис. 8), можно обеспечить непрерывное вращение ротора. Обратите внимание, что токи ІA, ІB, ІC фазных обмоток сдвинуты во времени друг по отношению к другу на треть периода Т. Изменяя период переключения тока в обмотках, можно регулировать скорость вращения ротора. Для изменения движущего момента электродвигателя изменяют величину тока обмоток статора или индукцию магнитного поля ротора (если на роторе вместо постоянных магнитов установлена обмотка возбуждения, т.е., электромагнит).
Рис. 8 Изменение во времени токов обмоток статора шагового двигателя
В трехфазном шаговом двигателе магнитное поле статора может занимать в пространстве только 6 положений (см. рис. 7), а перемещается оно между ними скачками. Вследствие этого возникают пульсации движущего момента электродвигателя, а обеспечить плавное вращение очень трудно. Если токи фазных обмоток изменять не ступенчато (как на рис. 8), а по закону синуса со сдвигом в треть периода (рис. 9), поле статора будет вращаться плавно (т.н. вращающееся магнитное поле). Ротор со временем догонит поле статора и далее будет вращаться синхронно с ним. Именно в таком режиме работают синхронные двигатели.
Рис. 9 Фазные токи синхронного двигателя
У асинхронного двигателя такой же статор, как и у синхронного, а по обмоткам статора также протекают синусоидальные токи (как на рис. 9). Однако конструкция ротора своеобразна (рис. 10). Ротор набран из листов электротехнической стали (как и статор). В пазах ротора уложены стержни (алюминиевые или медные), которые на торцах ротора замкнуты с помощью колец. Если ротор вращается со скоростью, меньшей скорости поля статора, в обмотке ротора полем статора наводится электродвижущая сила, которая приводит к протеканию по обмотке ротора токов. Токи вызывают появление магнитного поля ротора, а взаимодействие двух полей – создание движущего момента, который поворачивает ротор. Поскольку движущий момент возникает только тогда, когда скорости ротора та поля статора неодинаковы, ротор не может двигаться синхронно з полем статора (отсюда и название двигателя: асинхронный, т.е. «несинхронный»). Благодаря простоте конструкции, дешевизне и надежности асинхронные двигатели получили наибольшее распространение.
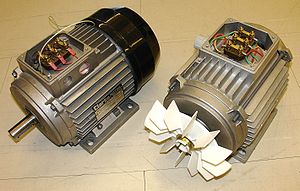
Конструкция асинхронного электродвигателя показана на рис. 11, 12.
Рис. 10 Ротор асинхронного двигателя: а – короткозамкнутая обмотка, б – поперечный разрез ротора Рис. 11 Асинхронный двигатель (разрезано) Рис. 12 Асинхронный двигатель в разобранном виде
Двигатель постоянного тока
Двигатель постоянного тока, в отличие от двигателей переменного тока, питается от источника постоянного тока. Магнитное поле статора создается неподвижными постоянными магнитами, а на роторе (иначе — якоре) расположена обмотка. Якорь жестко соединен с валом и может вращаться вокруг свои оси. Таким образом, конструктивно двигатель постоянного тока является обратной синхронной машиной.
Принцип действия двигателя постоянного тока поясняет рис. 13. Поле статора создают постоянные магниты или электромагниты (обмотки возбуждения). На ферромагнитном сердечнике якоря помещена обмотка, состоящая из двух последовательно включенных частей (их соединяет показанный пунктиром проводник). На якоре также размещены изолированные друг от друга коллекторные пластины, к которым присоединены концы обмотки якоря. К коллекторным пластинам через неподвижные графитные щетки от источника питания подается постоянный ток. Если верхнюю щетку подключить к положительному полюсу источника питания, а нижнюю – к отрицательному, по обмотке якоря будет протекать ток І, показанный на рис. 13. По правилу буравчика левый полюс якоря станет северным, правый – южным. Полюса якоря и статора будут отталкиваться друг от друга, вызывая поворот якоря по часовой стрелке. Якорь, поворачиваясь, по инерции «проскакивает» положение «северный по-люс против южного», и под щетками оказывается другие коллекторные пластины. Направление тока в обмотке якоря меняется на противоположное, полюса якоря меняются местами, и вращение якоря продолжается. Для изменения направления вращения якоря следует изменить полярность напряжения, поданного к щеткам.
Конструкцию, подобную показанной на рис. 13, имеют маломощные двигатели (используемые, например, в детских игрушках). В промышленных двигателях для обеспечения плавности движения якорь имеет много отдельных секций обмотки, соединенных с отдельными парами коллекторных пластин (подобно рис. 14). При вращении якоря через пару щеток к источнику подключается каждый раз следующая секция якоря, которая в данном положении якоря имеет наибольшую магнитную связь с полем статора.
Рис. 13 К принципу действия двигателя постоянного тока Рис. 14 Якорь двигателя постоянного тока
В электроприводе обычно возникает задача автоматического управления электрическими двигателями. В простейших случаях достаточно только обеспечить их запуск, остановку, изменение направления вращения и защиту от аварийных режимов. Подобные функции легко реализуются с помощью простых и относительно дешевых электромеханических контакторов и реле. Однако нередко есть необходимость в плавном регулировании скорости вращения и движущего момента. Тогда для питания двигателей используют управляемые источники питания – полупроводниковые преобразователи энергии (управляемые выпрямители для двигателей постоянного тока и преобразователи частоты для двигателей переменного тока) и довольно сложные системы автоматического регулирования. Электроприводы, в состав которых, кроме двигателя, входят управляемые преобразователи энергии и системы автоматического управления, способны выполнять производственную задачу с минимальным участием человека. Они получили название автоматизированных электроприводов.
Видео о конструкции асинхронных двигателей и двигателей постоянного тока
Официальный канал кафедры Электропривода НГУ в YouTube
Скачать эту статью в формате pdf (1,65МБ)
Электрический двигатель — это… Что такое Электрический двигатель?
 Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравненияЭлектрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Принцип действия
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. Сейчас эти двигатели редкость, так как на рынке появились преобразователи частоты, ранее же они очень часто использовались в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трехфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует эдс), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов. Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трехфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надежнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно с вращающимся полем статора. Там, где нет трехфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.
Рис.1. Трехфазный двухполюсный асинхронный двигатель
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f: nc=f/p
При частоте 50 Гц получаем для р = 1, 2, 3 (двух-, четырех- и шести полюсных машин) синхронные частоты вращения поля nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с беличьей клеткой) или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Источник
Устройство асинхронного двигателя http://techno.x51.ru/index.php?mod=text&uitxt=905
Классификация электродвигателей
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока
 Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щёткамиДвигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.[1]
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
- Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.[2]
Двигатели переменного тока
 Трехфазные асинхронные двигатели
Трехфазные асинхронные двигателиДвигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).[2]
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Примечания
Литература
- Белов М. П., Новиков В. А., Рассудов Л. Н. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. — 3-е изд., испр. — М.: Издательский центр «Академия», 2007. — 575 с. — (Высшие профессиональное образование). — 1000 экз. — ISBN 978-5-7695-4497-2
Ссылки
История создания электродвигателя
Электромеханика является относительно молодой, по историческим меркам, отраслью науки и техники.
1800, Вольта
Итальянский физик, химик и физиолог, Алессандро Вольта, первый в мире создал химический источник тока.
1820, Эрстед
Датский ученый, физик, Ханс Кристиан Эрстед, обнаружил на опыте отклоняющее действие тока на магнитную стрелку.
1821, Фарадей

Первый электродвигатель Фарадея, 1821 г.
Британский физик-экспериментатор и химик, Майкл Фарадей, опубликовал трактат «О некоторых новых электромагнитных движениях и о теории магнетизма», где описал, как заставить намагниченную стрелку непрерывно вращаться вокруг одного из магнитных полюсов. Эта конструкция впервые реализовала непрерывное преобразование электрической энергии в механическую. Принято считать ее первым электродвигателем в истории.
1822, Ампер
Французский физик, Андре Мари Ампер, открыл магнитный эффект соленоида (катушки с током), откуда следовала идея эквивалентности соленоида постоянному магниту. Среди прочего Ампер предложил использовать железный сердечник, помещенный внутрь соленоида, для усиления магнитного поля. В 1820 году им был открыт закон Ампера.
1822, Барлоу
Английский физик и математик, Питер Барлоу, изобрел колесо Барлоу, по сути, униполярный электродвигатель.
1825, Араго
Французский физик и астроном, Доминик Франсуа Жан Араго, опубликовал опыт показывающий, что вращающийся медный диск заставляет вращаться магнитную стрелку, подвешенную над ним.
1825, Стёрджен
Британский физик, электротехник и изобретатель, Уильям Стёрджен, в 1825 изготовил первый электромагнит, который представлял из себя согнутый стержень из мягкого железа с обмоткой из толстой медной проволоки.

Вращающееся устройство Йедлика, 1827/28 гг.
1827, Йедлик
Венгерский физик и электротехник, Аньош Иштван Йедлик, изобрел первую в мире динамо-машину (генератор постоянного тока), однако практически не объявлял о своем изобретении до конца 1850-х годов.
1831, Фарадей
Английский физик, Майкл Фарадей, открыл электромагнитную индукцию, то есть явление возникновения электрического тока в замкнутом контуре при изменении магнитного потока, проходящего через него. Формулировка закона электромагнитной индукции.
1831, Генри
Американский физик, Джозеф Генри, независимо от Фарадея обнаружил взаимоиндукцию, но Фарадей раньше опубликовал свои результаты.
1832, Пикси

Генератор постоянного тока Пикси
Француз, Ипполит Пикси, сконструировал первый генератор переменного тока. Устройство состояло из двух катушек индуктивности с железным сердечником напротив которых располагался вращающийся магнит подковообразной формы, который приводился в движение вращением рычага. Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.

Электродвигатель Стёрджена
Strurgejn’s Annals of Electricity, 1836/37, vol. 1
1833, Стёрджен
Британский физик, Уильям Стёрджен, публично продемонстрировал электродвигатель на постоянном токе в Марте 1833 года в Аделаидской галерее практической науки в Лондоне. Данное изобретение считается первым электродвигателем, который можно было использовать.
1833, Ленц
В начале в электромеханике разграничивали магнито-электрические машины (электрические генераторы) и электро-магнитные машины (электрические двигатели). Российский физик (немецкого происхождения), Эмилий Христианович Ленц, опубликовал статью о законе взаимности магнито-электрических явлений, то есть о взаимозаменяемости электрического двигателя и генератора.
Май 1834, Якоби

Первый вращающийся электродвигатель. Якоби, 1834
Немецкий и русский физик, академик Императорской Санкт-Петербургской Академии Наук, Борис Семенович (Мориц Герман фон) Якоби, изобрел первый в мире электродвигатель с непосредственным вращением рабочего вала. Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
1836 — 1837, Дэвенпорт
Проводя эксперименты с магнитами, американский кузнец и изобретатель, Томас Дэвенпорт, создает свой первый электромотор в июле 1834 года. В декабре этого же года он впервые продемонстрировал свое изобретение. В 1837 году Дэвенпорт получил первый патент (патент США №132) на электрическую машину.
1839, Якоби
Используя электродвигатель питающийся от 69 гальванических элементов Грове и развивающий 1 лошадиную силу, в 1839 г. Якоби построил лодку способную двигаться с 14 пассажирами по Неве против течения. Это было первое практическое применение электродвигателя.
1837 — 1842, Дэвидсон
Шотландский изобретатель, Роберт Дэвидсон, занимался разработкой электродвигателя с 1837 года. Он сделал несколько приводов для токарного станка и моделей транспортного средства. Дэвидсон изобрел первый электрический локомотив.
1856, Сименс
Немецкий инженер, изобретатель, ученый, промышленник, основатель фирмы Siemens, Вернер фон Сименс изобрел электрический генератор с двойным T-образным якорем. Он первый разместил обмотки в пазах.
1861-1864, Максвелл
Британский физик, математик и механик, Джеймс Клерк Максвелл, обобщил знания об электромагнетизме в четырех фундаментальных уравнениях. Вместе с выражением для силы Лоренца уравнения Максвелла образуют полную систему уравнений классической электродинамики.
1871-1873, Грамм
Бельгийский изобретатель, Зеноб Теофил Грамм, устранил недостаток электрических машин с двух-Т-образным якорем Сименса, который заключался в сильных пульсациях вырабатываемого тока и быстром перегреве. Грамм предложил конструкцию генератора с самовозбуждением, который имел кольцевой якорь.
1885, Феррарис
Итальянский физик и инженер, Галилео Феррарис, изобрел первый двухфазный асинхронный электродвигатель. Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
1887, Тесла
Американец сербского происхождения, изобретатель, Никола Тесла, работая независимо от Феррариса, изобрел и запатентовал двухфазный асинхронный электродвигатель с явно выраженными полюсами статора (сосредоточенными обмотками). Тесла ошибачно считал что двухфазная система токов оптимальна с экономической точки зрения среди всех многофазных систем.
1889-1891, Доливо-Добровольский
Русский электротехник польского происхождения, Михаил Осипович Доливо-Добровольский, прочитав доклад Феррариса о вращающемся магнитном поле изобрел ротор в виде «беличьей клетки». Дальнейшая работа в этом направлении привела к разработке трехфазной системы переменных токов и трехфазного асинхронного электродвигателя, получившего широкое применение в промышленности и практически не изменившегося до нашего времени.
Широкое внедрение электромеханических устройств в России начинается после Октябрьской революции 1917 г., когда электрификация всей страны стала основой технической политики нового государства. Можно сказать, что XX век стал веком становления и широкого распространения электромеханики.
Выбор между двухфазной и трехфазной системой
Доливо-Добровольский справедливо считал, что увеличение числа фаз в двигателе улучшает распределение намагничивающей силы по окружности статора. Переход к трехфазной системы от двухфазной уже дает большой выигрыш в этом отношении. Дальнейшее увеличение числа фаз нецелесообразно, так как приводит к значительному увеличению расходов металла на провода.
Для Теслы же казалось очевидным, что чем меньше число фаз, тем меньше требуется проводов, и следовательно тем дешевле устройство электропередачи. При этом двухфазная система передачи требовала применения четырех проводов, что представлялось не желательным в сравнении с двух проводными системами постоянного или однофазного переменного токов. Поэтому Тесла предлагал применять трех проводную линию для двухфазной системы, делая один провод общим. Но это не сильно уменьшало количество затрачиваемого на систему металла, так как общий провод должен был быть большего сечения.
Таким образом трехфазная система токов предложенная Доливо-Добровольским была оптимальной для передачи энергии. Она практически сразу нашла широкое применение в промышленности и до наших дней является основной системой передачи электрической энергии во всем мире.
Однофазный асинхронный электродвигатель
Дмитрий Левкин
Однофазный асинхронный электродвигатель — это асинхронный электродвигатель, который работает от электрической сети однофазного переменного тока без использования частотного преобразователя и который в основном режиме работы (после пуска) использует только одну обмотку (фазу) статора.Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.
Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.

Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.

Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Запустить

Остановить

Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
 ,
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Запустить

Остановить

Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
 ,
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя

Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
 ,
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить

Остановить

Вращающееся магнитное поле пронизывающее ротор

Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
 ,
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
 ,
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц

Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
 ,
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
 ,
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
 ,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
 ,
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.
Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.

С помощью одной фазы нельзя запустить ротор

Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение  .
.
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов. Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.

Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки

Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.

Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk. Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.

Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.