
Характеристики двигателя постоянного тока
Основной характеристикой двигателя постоянного тока, определяющей его свойства в установившемся режиме, является механическая характеристика
 при
при  и
и .
.
Уравнение механической характеристики получается из (6.1)
 .
(6.2)
.
(6.2)
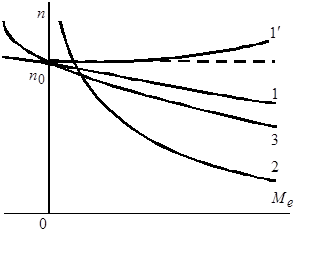
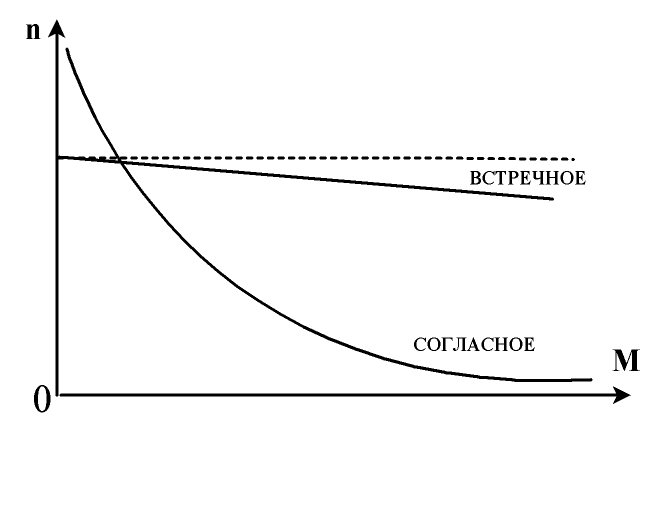
На рис. 6.42 представлены механические характеристики при различных способах возбуждения. Механическая характеристика двигателя параллельного возбуждения
 )
имеет слабо падающий характер (кривая
1).
)
имеет слабо падающий характер (кривая
1).Если размагничивающая реакция двигателя параллельного возбуждения велика (поток Ф существенно снижается при увеличении нагрузки), то механическая характеристика будет иметь положительный наклон (кривая 1). Такая характеристика, как правило, не позволяет получить установившийся режим.
В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,
а электромагнитный момент пропорционален квадрату тока якоря,
 .
.
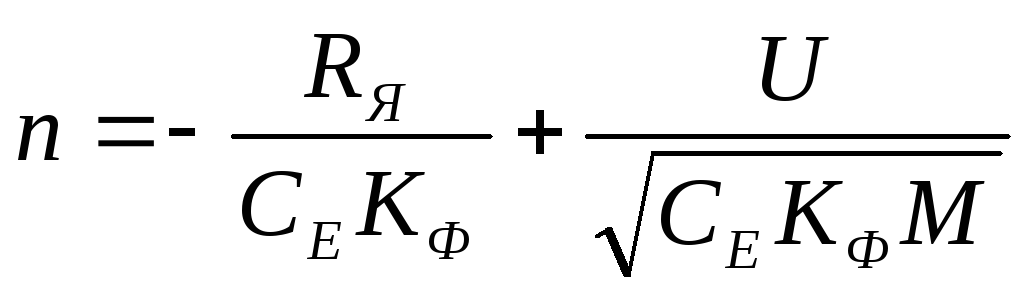
С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид
 . (6.3)
. (6.3)
Этому уравнению
соответствует кривая 2 (рис. 3), имеющая
гиперболический характер. При 
 ,
поэтому двигатели последовательного
возбуждения не могут работать в режиме
холостого хода.
,
поэтому двигатели последовательного
возбуждения не могут работать в режиме
холостого хода.Рис.3
Вместе с тем
квадратичная зависимость электромагнитного
момента от тока якоря дает важное
преимущество двигателям последовательного
возбуждения при перегрузках перед
двигателями параллельного возбуждения,
момент которых является линейной
функцией тока  .
Это преимущество особенно существенно
при пуске, так как при одном и том же
пусковом токе (
.
Это преимущество особенно существенно
при пуске, так как при одном и том же
пусковом токе (
Рис. 4
Механическая
характеристика двигателя смешанного
возбуждения (кривая 3 рис. 3) занимает промежуточное
положение. Обладая близкими с двигателями
последовательного возбуждения свойствами
при перегрузках, двигатели смешанного
возбуждения могут работать и при малых
нагрузках, что позволяет осуществить
рекуперацию энергии в сеть при 
 ).
Это свойство можно использовать в
транспортных установках при движении
с горы, создавая тормозной момент и
одновременно возвращая в сеть запасенную
кинетическую энергию.
).
Это свойство можно использовать в
транспортных установках при движении
с горы, создавая тормозной момент и
одновременно возвращая в сеть запасенную
кинетическую энергию.Регулирование частоты вращения двигателей постоянного тока
а) б)
Рис.4
Согласно (6.2),
регулирование частоты вращения двигателей
постоянного тока можно осуществлять путем изменения
потока Ф, введения
дополнительного сопротивления  в цепь якоря иизменения
напряжения сети
в цепь якоря иизменения
напряжения сети  .
В двигателях параллельного возбуждения
наиболее просто осуществляется
регулирование изменением потока,
реализуемого с помощью реостата
.
В двигателях параллельного возбуждения
наиболее просто осуществляется
регулирование изменением потока,
реализуемого с помощью реостата
 потокФ уменьшается и частота вращения растет.
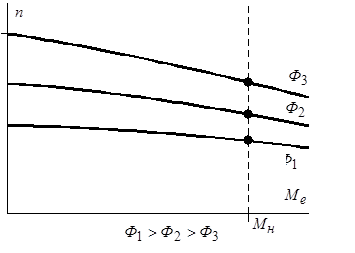
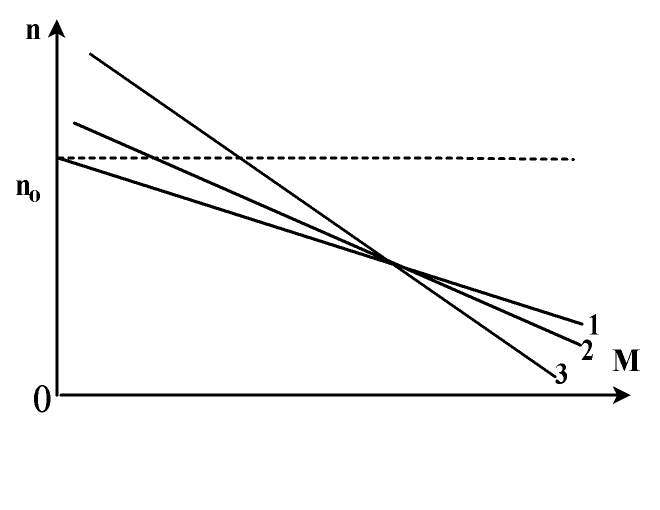
На рис. 4а представлены механические
характеристики двигателя параллельного
возбуждения при трех значениях потока.
Таким способом регулируют частоту
вращения в пределах
потокФ уменьшается и частота вращения растет.
На рис. 4а представлены механические
характеристики двигателя параллельного
возбуждения при трех значениях потока.
Таким способом регулируют частоту
вращения в пределах  ,
, .
Верхний уровень частот ограничивается
условиями коммутации. Кроме того, при
глубоком уменьшении потока возбуждения
усиливается размагничивающее действие
реакции якоря, жесткость механической
характеристики растет, и падающая
характеристика при номинальном потоке
может стать возрастающей при ослабленном
потоке, что приведет к нарушению
устойчивой работы двигателя.
.
Верхний уровень частот ограничивается
условиями коммутации. Кроме того, при
глубоком уменьшении потока возбуждения
усиливается размагничивающее действие
реакции якоря, жесткость механической
характеристики растет, и падающая
характеристика при номинальном потоке
может стать возрастающей при ослабленном
потоке, что приведет к нарушению
устойчивой работы двигателя. Регулирование
частоты вращения двигателя путем
введения в цепь якоря дополнительного
сопротивления  позволяет изменять частоту вращения
вниз от номинальной в широких пределах
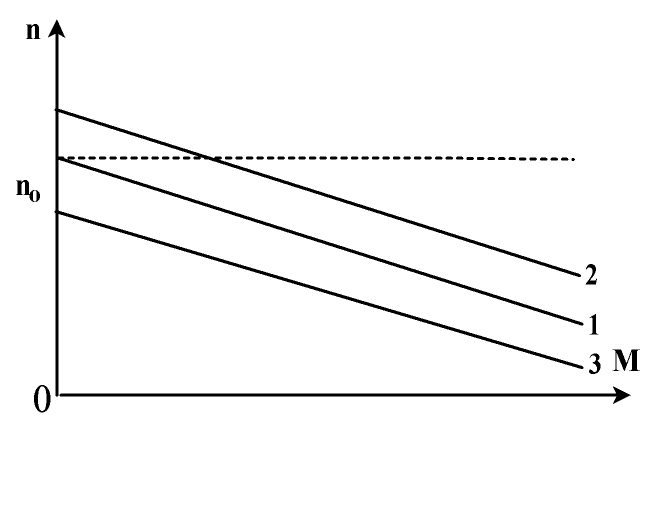
(рис. 4 б). Но этот способ не экономичен.
Полезная мощность двигателя при
постоянном моменте пропорциональна
частоте вращения (без учета потерь в
якоре):
позволяет изменять частоту вращения
вниз от номинальной в широких пределах
(рис. 4 б). Но этот способ не экономичен.
Полезная мощность двигателя при
постоянном моменте пропорциональна
частоте вращения (без учета потерь в
якоре):
 ,
,
а потребляемая из сети мощность от частоты вращения не зависит,
 .
.
Поэтому КПД двигателя пропорционален частоте вращения якоря,
 .
.
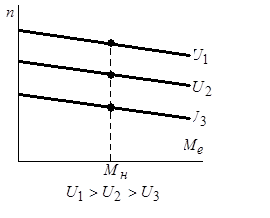
Рис.5
Кроме того, при
введении дополнительного сопротивления  жесткость механической характеристики
двигателя снижается, что может привести
к ухудшению работы приводного механизма.
жесткость механической характеристики
двигателя снижается, что может привести
к ухудшению работы приводного механизма.
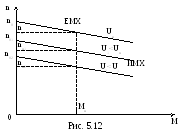
Более совершенным способом регулирования частоты вращения вниз является регулирование путем изменения подводимого к двигателю напряжения. На рис. 5 представлены механические характеристики двигателя параллельного возбуждения для трех значений напряжений. Жесткость механических характеристик практически не меняется, поэтому таким способом можно регулировать частоту вращения от номинальной до нуля.
Рассмотренные способы регулирования частоты вращения двигателей параллельного возбуждения применяются и в двигателях смешанного возбуждения.
Регулирование
частоты вращения двигателей
последовательного возбуждения
осуществляется путем изменения тока в
последовательной обмотке 
При шунтировании
обмотки возбуждения ток  уменьшается и частота вращения якоря
растет, а при шунтировании якоря
напряжение якоря уменьшается, поэтому
частота вращения падает.
уменьшается и частота вращения якоря
растет, а при шунтировании якоря
напряжение якоря уменьшается, поэтому
частота вращения падает.
Регулирование частоты вращения вверх осуществляется практически при постоянном КПД

Верхний уровень частоты вращения ограничивается условиями коммутации.
Регулирование частоты вращения вниз может осуществляться вплоть до нуля, однако КПД этого способа снижается пропорционально напряжению якоря и частоте вращения:
 ,
,
где
— частота вращения якоря при .
.
Таким образом, этот способ регулирования так же, как и реостатный способ регулирования частоты вращения двигателя с параллельным возбуждением, является неэкономичным. Он используется лишь в случае двигателей малой мощности.
3.3.Технические данные двигателей
В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение Uи, мощность Pн, частота вращения nн, ток Iн, КПД. Под номинальным Uн понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя. Номинальный ток Iн – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан:

где Iян — ток якоря при номинальной нагрузке; Iвн – ток обмотки возбуждения при номинальном напряжении. Следует отметить, что ток возбуждения Iвн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают:

Номинальная мощность Рн — это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн. В общем случае мощность на валу P2, момент М и частота вращения n связаны соотношением:

Потребляемая
двигателем из сети мощность Р1,
величины P2, КПД,
U, I связаны соотношениями: 
где 
Очевидно, что эти соотношения справедливы также и для номинального режима работы двигателя.[4]
3.4.Характеристики двигателей постоянного тока Рабочие характеристики
Рабочими называются регулировочная, скоростная, моментная и к.п.д. характеристики.
Регулировочная характеристика
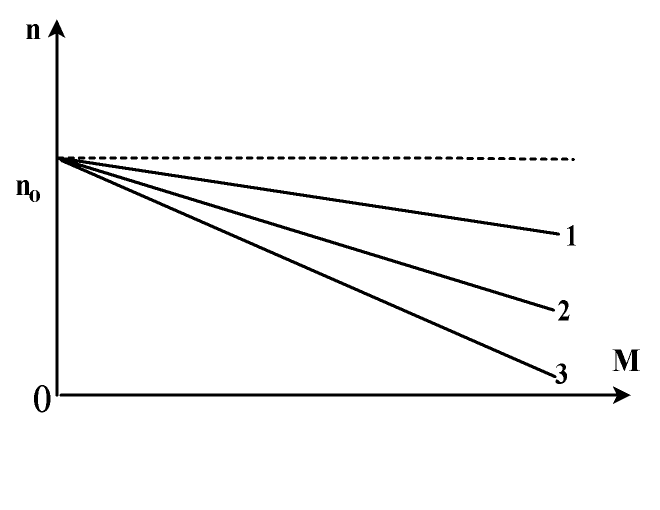
Регулировочная характеристика представляет зависимость скорости вращения П от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом случае регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 2). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов, как говорят: «Двигатель идет вразнос». Исключением может быть микродвигатели, у которых большой момент М0 холостого хода.
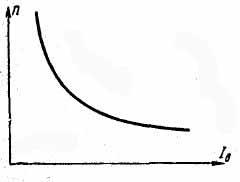
Рис. 2. Регулировочная характеристика двигателя
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.[4]
Скоростные характеристики.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
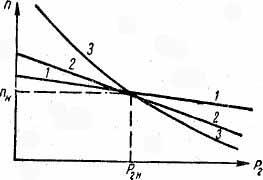
Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая — увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3). .[5]
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики.
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя

Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
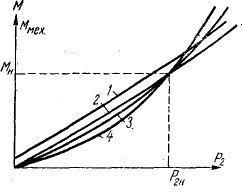
Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
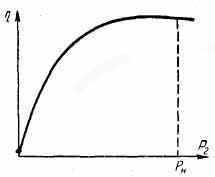
Рис. 5. Изменение к. п. д. двигателя
Механическая характеристика
Важнейшей характеристикой двигателя является механическая n(M). Она показывает, как зависит частота вращения двигателя от развиваемого момента. Если к обмоткам двигателя подведены номинальные напряжения и отсутствуют дополнительные резисторы в его цепях, то двигатель имеет механическую характеристику, называемую естественной. На естественной характеристике находится точка, соответствующая номинальным данным двигателя (Мн, Ря и т.д.). Если же напряжение на обмотке якоря меньше номинального, либо Iв < Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения. Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(Iя):
 (7)
(7)
Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(Iя):
 (7)
(7)
После замены в уравнении (7) тока Iя согласно формуле (1), получим уравнение механической характеристики n(М):
 (8)
(8)
При Ф = соnst, электромеханическая n(Iя) и механическая n(М) характеристики двигателя параллельного возбуждения представляют собой прямые линии. Так как за счет реакции якоря магнитный поток немного изменяется, то характеристики в действительности несколько отличаются от прямых. При работе вхолостую (М = 0) двигатель имеет частоту вращения холостого хода, определяемую первым членом уравнения (8). С увеличением нагрузки n уменьшается. Как следует из уравнения (8), это объясняется наличием сопротивления якоря rя.
Поскольку rя не велико, частота вращения двигателя при увеличении момента изменяется мало, и двигатель имеет жесткую естественную механическую характеристику (рис.6).[4]
Из уравнения (8) следует, что регулировать частоту вращения при заданной постоянной нагрузке (М = const) можно тремя способами:
а) изменением сопротивления цепи якоря;
б) изменением магнитного потока двигателя;
в) изменением напряжения на зажимах якоря.
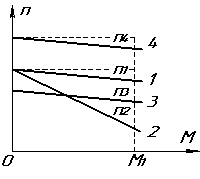 Рис.
6 Механические характеристики.
Рис.
6 Механические характеристики.
Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд.
Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря rя + rд при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается. Разным сопротивлениям rд соответствуют различные искусственные механические характеристики, одна из которых приведена на рис.2 (характеристика 2). С помощью характеристики 2 при заданном моменте М1 можно получить частоту вращения n2.
Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения IВ и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения.
Каждому значению магнитного потока соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 4). С помощью характеристики 4 при моменте М1 можно получить частоту вращения n4.
Чтобы регулировать частоту вращения изменением напряжения на зажимах якоря, необходимо иметь относительно мощный регулируемый источник напряжения. Каждому значению напряжения соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2(характеристика 3). С помощью характеристики 3 при заданном моменте М1 можно получить частоту вращения n3.
Литература:
1.Твайдедл Дж., Уэйр А.Возобновляемые источники энергии: Пер. с англ. М.Энергоатомиздат, 1990.
2.Бронч-Бруевич В.Л, Калашников С.Г. Физика полупроводников. М.Наука,1990.
3.Андреев В.М., Грихилес В.А., Румянцев. Фотоэлектрическое преобразование концентрированного солнечного излучения.Л. Наука,1989.
4. Кацман М.М. Электрические машины. -М.: Высш. шк., 1993.
5. Копылов И.П. Электрические машины. -М.: Энергоатомиздат, 1986
24
Рабочие характеристики
Рабочие характеристики ДПТ параллельного возбуждения малой мощности приведены на рис. 5.8.
Р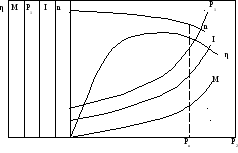 ис.
5.8
ис.
5.8
Рабочие характеристики двигателя представляют собой зависимости скорости вращения n, потребляемого тока I и мощности P1, момента на валу двигателя M, коэффициента полезного действия η от полезной мощности P2 при неизменном значении напряжения питания Uн = const, тока обмотки возбуждения Iвн=const и отсутствии добавочного сопротивления в якорной цепи Rд я = 0. Они дают возможность судить об эксплуатационных свойствах двигателей и определять наиболее экономичные их режимы работы в условиях производства.
Механическая характеристика двигателя постоянного тока
Механическими характеристиками двигателя называются зависимости установившейся частоты вращения от момента на валу двигателя – n=f1(M) или ω=f2(M).
Характеристики называют естественными, если они получены при номинальных условиях питания (при номинальном напряжении), номинальном возбуждении и отсутствии добавочных сопротивлений в цепи якоря.
Характеристики двигателя называются искусственными при изменении любого из перечисленных выше факторов.
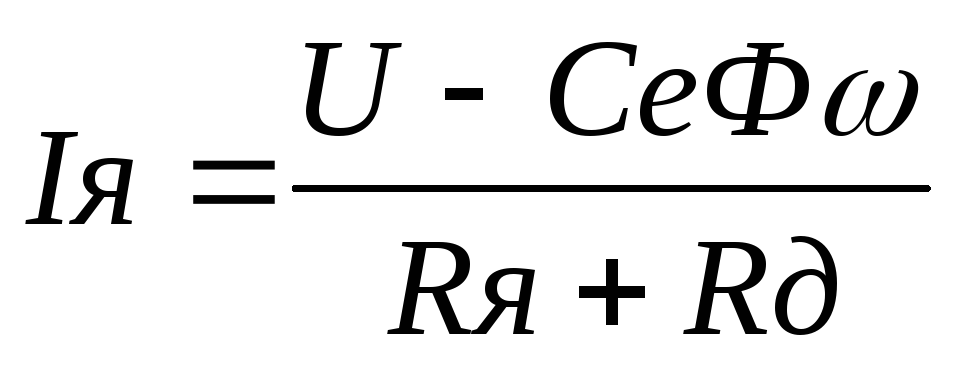
Подставим
в уравнение  ,выражения для
определения тока и ЭДС ДПТ
,выражения для
определения тока и ЭДС ДПТ
Ея = СЕnФ,
Механическая характеристика двигателя постоянного тока с независимым и параллельным возбуждением имеет вид:
 ,
,
где Rяц = Rя + Rдоб – полное сопротивление цепи якоря, Ом;
RЯ – сопротивление обмотки якоря, Ом;
Rдоб – добавочное сопротивление в цепи якоря, Ом.
Анализируя выражение для построения механической характеристики, видим, что математически это уравнения прямой линии, пересекающей ось скоростей в точке n0, где
n0 = U/( ·Ф)
– скорость холостого хода.
·Ф)
– скорость холостого хода.
где Pн – номинальная мощность двигателя, Вт;
ωн – номинальная частота вращения, рад/сек.
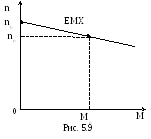
Естественная механическая характеристика показана на рис. 5.9.
Для построения естественной механической характеристики (ЕМХ) необходимо найти две точки.
Одна из них определяется из паспортных данных двигателя для номинальных значений nн и Мн:
Мн = Pн/ωн , ωн = π·nн/30 = 0,105·nн,
где Pн – номинальная мощность двигателя, Вт;
ωн – номинальная частота вращения, рад/сек .
Вторая точка соответствует идеальному холостому ходу, когда I = 0 и М=0.
Скорость холостого хода можно найти из следующего уравнения при подстановке паспортных данных двигателя:
 .
.
Регулирование скорости вращения дпт
Существует три основных способа регулирования частоты вращения машин постоянного тока: реостатное регулирование, регулирование изменением магнитного потока, регулирование изменением напряжения сети.
Реостатное
регулирование частоты вращения осуществляется путем
введения в цепь якоря дополнительных
активных сопротивлений – резисторов,
т.е. Rяц = (Rя + Rдоб)
= var при U = Uн,
Ф = Фн.
Как видно из уравнения механической
характеристики 
при изменении величины добавочного сопротивления Rдоб в цепи якоря скорость идеального холостого хода n0 остается постоянной изменяется лишь жесткость характеристики.
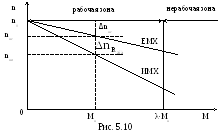 Искусственные
механические характеристики (ИМХ) при
введении добавочного сопротивления в
цепь ротора двигателя постоянного тока
независимого возбуждения показаны на
рис. 5.10.
Искусственные
механические характеристики (ИМХ) при
введении добавочного сопротивления в
цепь ротора двигателя постоянного тока
независимого возбуждения показаны на
рис. 5.10.
Регулирование частоты вращения при изменении магнитного потока осуществляется преимущественно за счет ослабления магнитного потока Ф возбуждения двигателя, т.е. за счет уменьшения тока возбуждения iв.
При уменьшении магнитного потока обычно соблюдаются условия: U = Uн; Rдя= 0. В этом случае для скорости идеального холостого хода имеем
 ,
тогда
,
тогда  ,
,
где  —
скорость холостого хода для искусственной
механической характеристики;
—
скорость холостого хода для искусственной
механической характеристики;
 —
скорость холостого хода для естественной
механической характеристики.
—
скорость холостого хода для естественной
механической характеристики.
Искусственные механические характеристики при уменьшении магнитного потока представлены на рис. 5.11.
Д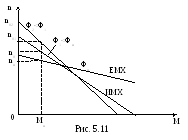 ля
регулирования частоты вращения двигателя
постоянного токанезависимого возбуждения изменением
питающего напряжения необходимы регулируемые источники
напряжения.
ля
регулирования частоты вращения двигателя
постоянного токанезависимого возбуждения изменением
питающего напряжения необходимы регулируемые источники
напряжения.
Из
уравнения механической характеристики
видно, что с регулированием напряжения
связано изменение скорости идеального
холостого хода n0 = Uн/( ·Фн)
при сохранении жесткости характеристик.
Это позволяет существенно расширить
диапазон регулирования. Регулирование
частоты вращения идет, как правило, вниз
от основной характеристики.Искусственные
характеристики при изменении
(уменьшении) напряжения будут иметь вид прямых. Механические
характеристики двигателя постоянного
тока независимого возбуждения при
изменении напряжения питания показаны
на рис. 5. 12.
·Фн)
при сохранении жесткости характеристик.
Это позволяет существенно расширить
диапазон регулирования. Регулирование
частоты вращения идет, как правило, вниз
от основной характеристики.Искусственные
характеристики при изменении
(уменьшении) напряжения будут иметь вид прямых. Механические
характеристики двигателя постоянного
тока независимого возбуждения при
изменении напряжения питания показаны
на рис. 5. 12.
20
Тема 4 Механические и скоростные характеристики двигателя постоянного тока
Основные типы машин постоянного тока
Машины постоянного тока параллельного возбуждения (шунтовые)
Машины постоянного тока последовательного возбуждения (сериесные)
Машины постоянного тока независимого возбуждения
Машины постоянного тока смешанного возбуждения
Основные уравнения и соотношения машин постоянного тока.
Уравнение баланса напряжений якорной цепи
U = E+Iя (Rя + Rд) – для двигателя
Под якорной цепью понимают обмотку якоря дополнительных полюсов, сопротивление перехода щетки коллектора.
Добавочное сопротивление включают последовательно с обмоткой якоря.
Е – ЭДС якоря;
U– напряжение подведенное к цепи якоря;
Iя – ток якоря;
Rя – сопротивление якорной обмотки дополнительных полюсов и перехода щетка – коллектор;
Rд – добавочное сопротивление цеп якоря
2. Уравнение пропорциональности ЭДС и частоты вращения
Е = Се Ф w; Е = Се Ф n; w = pn / 30
Се – коэффициент пропорциональности, включает в себя конструкционные параметры двигателя (якоря)
w- угловая скорость (с-1)
3. Выражение для определения электромагнитного вращающегося момента.
М = См Ф Iя;
M– момент развиваемый двигателем .
4.Скоростная характеристика
U = Ce Ф w + Iя (Rя + Rд)
 ;
;
5. Механическая характеристика
 М
= См Ф Iя
М
= См Ф Iя
 Се=См
Се=См
Механическая характеристика двигателя постоянного тока независимого возбуждения или шунтового (параллельного) возбуждения
Сопротивление обмотки возбуждения значительно больше сопротивления якорной, следовательно Iв составляет 5…10% токаIя.
Iв = (0,05…0,1) Iя
При номинальном напряжении по ней протекает номинальный ток при отсутствии добавочных сопротивлений.
Характерная особенность двигателей постоянного тока то, что ток в обмотке возбуждения Iв не зависит от тока якоряIя, соответственно от нагрузки машины.
Ток якоря зависит от нагрузки машины.
Р = U Iя от потребляемой мощности
Допускаем, что ток возбуждения и магнитный поток являются постоянными при любой нагрузке.
Iв =const; Ф = const.
Скоростная характеристика
 ; (y=Rx+b–прямая)
; (y=Rx+b–прямая)
 При
повышении тока якоря понижается угловая
частота
При
повышении тока якоря понижается угловая
частота
 w0 = U / СФточка
идеального холостого хода
w0 = U / СФточка
идеального холостого хода
 — пусковой ток якоря при введении
добавочного сопротивления
— пусковой ток якоря при введении
добавочного сопротивления

Режим при токе якоря равным ??? называется режимом идеального холостого хода, при этом двигатель постоянного тока имеет частоту вращения w0 = U / СФ.
При пуске w0 =0. Ток зависит лишь от величиныRя иRд. При этом пусковой ток больше номинального токаIп >Iном; Rдя – выбирается таким образом, что бы пусковой ток не превышал номинального более чем в 2,5 раза. При отсутствииRд возникает аварийный режим при которомIя во много раз (10…30) превышает номинальный ток двигателя. Следовательно пуск осуществляют только при введенном добавочном сопротивлении.
Механическая характеристика Механическая характеристика – имеет такой же вид как и скоростная

При повышении момента понижается угловая частота
Различают естественные и искусственные характеристики машин постоянного тока.
Естественными называются характеристики при получении расчетных данных двигателя отсутствуют добавочные сопротивления.
Искусственными называют характеристики полученные при изменении хотя бы одного параметра.
Искусственные характеристики шунтовых двигателей постоянного тока.





При естественной характеристики при изменении нагрузки машины постоянного тока от 0 до номинальной, скорость изменяется в пределах 10%.
Dw- изменение скорости характеризует потери в цепи якоря.
Величина характеризующая отличие номинальной частоты вращения от частоты идеального холостого хода называется скольжением.
Для шунтовых двигателей постоянного тока, S=3…6%, то есть характеристика жесткая.
Механическая характеристика двигателя постоянного тока
 (1)
(1)
Искусственные характеристики можно получить исходя из механической характеристики (1) изменяя следующие параметры:
напряжение сети
величину добавочного сопротивления
 Величину
магнитного потокаRд с
помощью изменения тока обмотки
возбуждения. ИзменяяRд
якоря.
Величину
магнитного потокаRд с
помощью изменения тока обмотки
возбуждения. ИзменяяRд
якоря.
 Величину
магнитного потокаRд с
помощью изменения тока обмотки
возбуждения. ИзменяяRд
якоря.
Величину
магнитного потокаRд с
помощью изменения тока обмотки
возбуждения. ИзменяяRд
якоря.  Rд2
> Rд1
Rд2
> Rд1
 w0 = U / СФ
w0 = U / СФ
При увеличении Rд характеристики становятся мягче.
При w=0 всё напряжение теряется в цепи якоря.
Электротехника и электроника для заочников / K00K30ER
Л Е К Ц И Я 30
1. Двигатели постоянного тока: классификация, характеристики.
2. Двигатели постоянного тока с независимым и параллельным возбуждением.
3. Двигатели постоянного тока с последовательным возбуждением.
4. Двигатели постоянного тока со смешанным возбуждением.
5. Пуск и регулирование скорости вращения.
1. Двигатели постоянного тока: классификация, характеристики.
В зависимости от способа включения обмоток возбуждения и якоря различают такие схемы возбуждения двигателей постоянного тока (ДПТ):
1 — магнитоэлектрические ДПТ, здесь рабочий поток создается постоянными магнитами. Это, как правило, двигатели малой мощности.
2 — ДПТ параллельного возбуждения, здесь поле создается шунтовой обмоткой.
3 — ДПТ последовательного возбуждения, здесь для создания поля служит сериесная обмотка.
4 — ДПТ смешанного возбуждения.
Работа ДПТ оценивается по совокупности следующих величин:
— напряжение питания U, В,
— потребляемый ток I, А,
— механическая мощность на валу Р2, Вт,
— вращающий момент М, Нм,
— частота вращения якоря n, мин ,
— ток возбуждения Iв, А.
Существенную роль при анализе работы ДПТ играют также и различные зависимости между указанными величинами, к этим характеристикам относятся: пусковые, рабочие, регулировочные и механические.
К пусковым характеристикам в первую очередь относят пусковой ток и пусковой момент.
Под рабочими характеристиками понимают зависимости частоты вращения, вращающего момента, КПД и тока якоря от Р2:
n, M,  , Iя = f(P2), при U
= Uном и Iв = Iвном
, Iя = f(P2), при U
= Uном и Iв = Iвном
Регулировочные характеристики определяют свойства ДПТ при регулировании частоты вращения якоря.
Для электроприводов важное производственное значение имеют, так называемые, механические характеристики ДПТ, представляющие собой зависимости
n = f(M) при U = const
2. ДПТ с независимым и параллельным возбуждением.
ДПТ с независимым возбуждением применяются в тех случаях, когда U на зажимах якоря изменяется в процессе работы или U возбуждения отличается по значению от напряжения якоря. Характеристики ДПТ с независимым возбуждением аналогичны характеристикам ДПТ с параллельным возбуждением, которые получили наибольшее распространение.
В двигателях с параллельным возбуждением общий ток Iн, потребляемый двигателем из сети, больше тока Iя на значение тока Iв
Iн = Iя + Iв
Составим уравнение механической характеристики.
Из уравнения Е = С Е n Ф имеем:
 (*)
(*)
Здесь С зависит прямо пропорционально от числа пар полюсов, числа проводников в обмотке якоря и обратно пропорционально от количества якорных обмоток.
Выразим Iя из уравнения М =СМ Ф Iя
Подставляя Iяв уравнение (*), получим
 (**)
(**)
При Iя = 0 и М = 0
 скорость
вращения ХХ
скорость
вращения ХХ
С увеличением нагрузки (момента и тока якоря) скорость вращения n уменьшается.
Для ДПТ с параллельным возбуждением U = const, Ф = const. Следовательно, полученное уравнение (**), есть уравнение прямой с отрицательным наклоном (рис. ).
Здесь
Механическая характеристика, полученная при отсутствии в цепи
якоря добавочных сопротивлений, называется естественной механической
характеристикой.
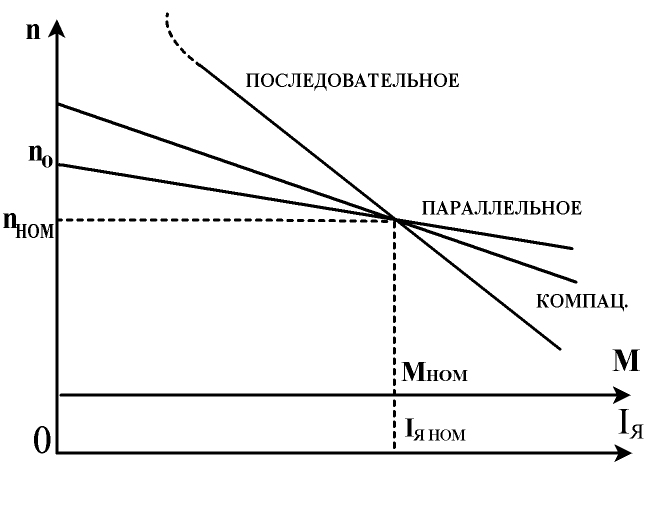
Рис.41
3. ДПТ с последовательным возбуждением.
У двигателя с последовательным возбуждением
Iя = Iв = Iн.
Для ненасыщенной машины основной поток Фо при этом пропорционален току якоря.
Фо = Кф Iя,
где Кф — коэффициент пропорциональности магнитного потока току.
В результате электромагнитный момент будет пропорционален квадрату тока Iя.

Откуда
 (***)
(***)
Полученные формулы ( ***) подставляем в уравнение (**)

С учетом, что СМ = СЕ имеем:
Как видно из этого уравнения, двигатель не имеет скорости холостого хода, т.к. при уменьшении нагрузки на валу n растет теоретически до бесконечности. В этом случае говорят, что двигатель идет «вразнос».
ДПТ с последовательным возбуждением применяются как тяговые двигатели на электротранспорте и в подъемных устройствах. В этом случае для предотвращения разноса используют небольшую шунтовую обмотку (она называется стабилизирующей).
4. ДПТ со смешанным возбуждением.
ДПТ со смешанным возбуждением еще называются компаундными. Последовательная обмотка, как и у генераторов, имеет небольшое число витков и может быть включена согласно и встречно, усиливая или ослабляя поле основной параллельной обмотки.
ДПТ со смешанным возбуждением по своим свойствам является промежуточным между ДПТ параллельного и ДПТ последовательного возбуждения (рис.) ДПТ со смешанным возбуждением позволяют получить значительный пусковой момент при относительно мягкой механической характеристике, а также, при встречном включении обмоток, добиться весьма жесткой характеристики.
5. Пуск и регулирование скорости вращения.
В начальный момент пуска ДПТ его якорь неподвижен, противо-ЭДС в обмотке якоря равна нулю, и, в соответствии с уравнением работы двигателя
ток якоря полностью определяется его сопротивлением. Это сопротивление невелико, поэтому пусковой ток может превышать номинальное значение в 30 и более раз. Резкий скачок тока при пуске создает на валу двигателя большой пусковой момент. Это может вызвать механические повреждения как самого ДПТ, так и исполнительного механизма, привести к резкому падению напряжения в сети и вызвать интенсивное искрение под щетками. Поэтому при пуске ДПТ для ограничения пускового тока применяют пусковые реостаты, включаемые последовательно в цепь якоря. По мере увеличения частоты вращения якоря ЭДС Ея увеличивается, а ток якоря уменьшается, сопротивление реостата постепенно выводят с таким расчетом,
чтобы в конце пуска оно было выведено, а ток в процессе разгона двигателя не превышал номинальное значение более, чем в 2-3 раза. Используя полученную выше формулу для частоты вращения якоря ( ),
можем наметить пути регулирования ее:
1. Изменением сопротивления в цепи якоря при введении добавочных
сопротивлений Rдоб.
Достоинства: возможность регулирования n в более широком диапазоне.
Недостатки: потеря энергии в Rдоб, уменьшение жесткости характеристики магнитного потока.
2. Изменением Iв и зависящего от него магнитного потока (за счет значения Rреос в цепи Iв).
Достоинства: экономичность.
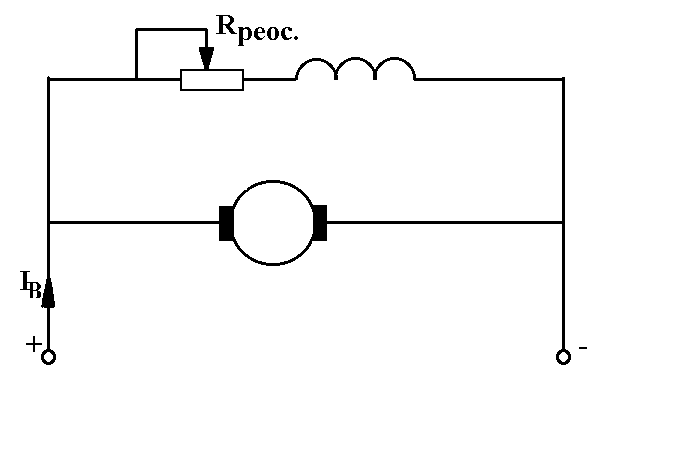
Недостатки: уменьшается жесткость характеристики, ограничен диапазон регулирования из-за насыщения магнитопровода.
3. Изменением напряжения U на зажимах якоря.
Достоинства: жесткость характеристики не меняется. Недостатки: требуется наличие регулируемого источника.
§ 30.4. Исполнительные двигатели постоянного тока
Исполнительные двигатели постоянного тока, так же как исполнительные асинхронные двигатели (см. § 17.4), применяются в системах автоматики для преобразования электрического сигнала в механическое перемещение. Помимо обычных требований, предъявляемых к электродвигателям общего назначения, к исполнительным двигателям предъявляется ряд специфических требований, из которых основными являются отсутствие самохода и малоинерционность (см. § 17.4).
Почти все исполнительные двигатели (исключение составляют лишь двигатели с постоянными магнитами) имеют две обмотки. Одна из них постоянно подключена к сети и называется обмоткой возбуждения, на другую — обмотку управления электрический сигнал подается лишь тогда, когда необходимо вызвать вращение вала. От напряжения управления зависят частота вращения и вращающий момент исполнительного двигателя, а следовательно, и развиваемая им механическая мощность.
Исполнительные двигатели постоянного тока по конструкции отличаются от двигателей постоянного тока общего назначения только тем, что имеют шихтованные (набранные из листов электротехнической стали) якорь, станину и полюсы, что необходимо для работы исполнительных двигателей в переходных режимах. Магнитная цепь исполнительных двигателей не насыщена, поэтому реакция якоря (см. § 26.2) практически не влияет на их рабочие характеристики.
В качестве исполнительных двигателей постоянного тока в настоящее время используют чаще всего двигатели с независимым возбуждением, реже — двигатели с постоянными, магнитами. У двигателей с независимым возбуждением в качестве обмотки управления используют либо обмотку якоря — двигатели с якорным управлением, либо обмотку полюсов — двигатели с полюсным управлением.
У исполнительных двигателей с якорным управлением обмоткой возбуждения является обмотка полюсов, а обмоткой управления — обмотка якоря (рис. 30.10, а). Обмотку возбуждения подключают к сети с постоянным напряжением на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя.
У исполнительных двигателей с полюсным управлением обмоткой управления является обмотка полюсов, а обмоткой возбуждения — обмотка якоря (рис. 30.10, б). Якорь двигателя постоянно подключен к сети с напряжением . Для ограничения тока иногда последовательно с якорем включают добавочное (балластное) сопротивление. На обмотку полюсов напряжение управления , (сигнал) подают лишь тогда, когда необходимо вызвать вращение якоря.
Рис. 30.10. Схема включения исполнительных двигателей постоянного тока
Исполнительные двигатели постоянного тока обычной конструкции имеют существенный недостаток — замедленность переходных процессов, т. е. отсутствие малоинерционности. Объясняется это в основном двумя причинами: наличием массивного якоря со стальным сердечником, обладающим значительным моментом инерции, и значительной индуктивностью обмотки якоря, уложенной в пазы сердечника якоря. Последняя причина способствует увеличению электромагнитной постоянной времени . Указанные недостатки отсутствуют в двигателях с гладким (полым) якорем (рис. 30.11). Станина 1 и полюсы 3 этого двигателя обычные. Возбуждение двигателя осуществляется либо с помощью обмотки возбуждения 2, либо постоянными магнитами.
Рис. 30.11. Малоинерционный исполнительный двигатель постоянного тока с полым якорем
Для уменьшения момента инерции якоря его обмотка отделена от массивного ферромагнитного сердечника, последний выполнен неподвижным (внутренний статор 5) и расположен на цилиндрическом выступе подшипникового щита 6.
Обмотка якоря в процессе изготовления укладывается на цилиндрический каркас, а затем заливается пластмассой. Готовый якорь 4 представляет собой полый стакан, состоящий из проводников обмотки, связанных воедино пластмассой. Концы секций обмотки, как и в обычном двигателе, соединяются с пластинами коллектора, который является частью дна полого стакана якоря 4. Вращающийся узел двигателя с гладким якорем состоит из вала, коллектора и обмотки якоря, залитой пластмассой.
Момент инерции полого якоря значительно меньше момента инерции обычного якоря, что обеспечивает хорошее быстродействие двигателя. Кроме того, индуктивность обмотки якоря снижается, что также способствует повышению быстродействия двигателя. К тому же снижение индуктивности обмотки улучшает коммутацию двигателя за счет уменьшения реактивной ЭДС (см § 27.4).
Недостаток рассмотренного малоинерционного двигателя с полым якорем — наличие большого немагнитного промежутка между полюсами статора и неподвижным ферромагнитным сердечником — внутренним статором. Этот промежуток складывается из двух воздушных зазоров и толщины стакана якоря (толщины слоя обмотки якоря). Наличие большого немагнитного промежутка на пути магнитного потока требует значительного увеличения МДС возбуждения, что приводит, во-первых, к увеличению габаритов двигателя из-за увеличения объема обмотки возбуждения, а во-вторых, к росту потерь на нагрев обмотки возбуждения. Однако КПД двигателя с полым якорем вследствие отсутствия потерь в стали сердечника якоря практически находится на том же уровне, что и в обычных двигателях, а в случае применения для возбуждения постоянных моментов значительно превосходит КПД последних.
Контрольные вопросы
1. Каково назначение компенсационной обмотки в ЭМУ?
2. Почему выходная характеристика тахогенератора криволинейна?
3. Будет ли работать БДПТ, если изменить полярность напряжения на его входе (см. рис. 30.6)?
4. Объясните принцип якорного и полюсного способов управления исполнительными двигателями?
5. Каковы достоинства и недостатки малоинерционного двигателя постоянного тока?
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Министерство образования и науки Российской федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт, техники, технологии и управления
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Методические указания к выполнению практической работы
по дисциплине «Электромеханические системы» для студентов
специальности 210100 всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2009
Цель работы: Изучить способы расчета механических характеристик двигателя постоянного тока независимого и последовательного возбуждения.
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДПТ
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Расчет механических характеристик электроприводов с ДПТНВ в основном режиме. Механические характеристики – зависимость частоты вращения n или угловой скорости ω от электромагнитного момента двигателя n=f(M) или ω=f(M) при неизменных значениях других параметров, способных влиять на частоту вращения и величину момента двигателя (напряжение питания, величины тока и так далее).
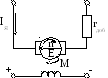
Рис.1. Схема двигателя постоянного тока
Без учета индуктивности якорной цепи
Следует что
Электромагнитный момент
- ,
 ,
,Тогда
где ω0 — скорость идеального холостого хода;
Δω — изменение угловой скорости относительно скорости холостого хода, вызванное изменением нагрузки двигателя (момента на его валу).
Все механические характеристики ДПТНВ пересекаются в точках ω0.
Регулирование частоты вращения ДПТНВ осуществляется:
— изменением сопротивления реостата rдоб в цепи якоря (только в сторону ее уменьшения от номинальной)
— изменением магнитного потока возбуждения с помощью реостата Ф в цепи обмотки возбуждения (при двухзонном регулировании)
— изменением подводимого к цепи якоря напряжения (только в низ от номинальной частоты вращения, так как подавать на двигатель напряжение выше номинального недопустимо по условиям коммутации и электрической прочности изоляции).
— импульсное регулирование (цепь якоря периодически подключается к сети). Если же хотя бы один из перечисленных параметров двигателя изменен, то механические характеристики называются искусственными.
Для ДПТ – механические характеристики прямолинейны и определяются двумя точками:
Точка А – точка холостого хода ω = ω0, M=0.
Точка Б – соответствующая номинальной нагрузке двигателя с координатами MНОМ и ωНОМ.
Для естественной характеристики точка Б определяется из каталога
- ;.
 ;
; .
.Для точки А скорость холостого хода
- ;.
 ;
; .
.Для построения искусственной характеристики точки Б рассчитывается число оборотов
- .
 .
. 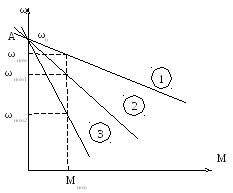
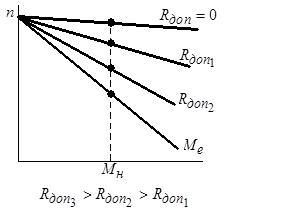
1 – естественная характеристика при rдоб1=0
2; 3 – искусственные характеристики при rдоб1>0 rдоб2>0, и при rдоб3>rдоб4
Рис.2. Естественная и искусственные механические характеристики
При расчете механических характеристик обычно решают одну из двух задач:
По заданным координатам точки на искусственной механической характеристики при номинальной нагрузке с координатами MНОМ и nНОМ определяют сопротивление резистора M, в соответствующее этой искусственной характеристики.
По заданным значениям сопротивления резистора M и тока якоря IЯНОМ, соответствующего номинальной нагрузке двигателя, определяют частоту вращения якоря двигателя и строят искусственную механическую характеристику.
Задача 1: ДПТНВ имеет номинальные данные:
— мощность РНОМ=42кВт;
— напряжение UНОМ=440В;
— частота вращения nНОМ=3000об/мин;
— сопротивление обмоток цепи якоря RЯ=0,17Ом;
— КПД ηНОМ=90,5%.
Требуется определить сопротивление резистора rдоб, который следует включить последовательно в цепь якоря, чтобы при номинальном моменте нагрузки MНОМ частота вращения была n’НОМ=0,5 nНОМ об/мин.
Решение:
Ток якоря в номинальном режиме:
Пограничная частота вращения:
Номинальный момент на валу двигателя:
Координаты точки номинального режима на естественной механической характеристики:
;.Номинальное сопротивление двигателя:
Сопротивление резистора M, соответствует искусственной механической характеристике с координатой частоты вращения:
Механические характеристики ЭП с рассматриваемым двигателем на рис.3:



 ;
; .
.


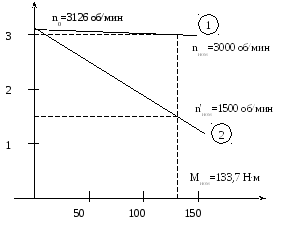
Рис.3. Естественная и искусственная механические характеристики
Н а
рис.3 цифрой 1 обозначена естественная
характеристика, а цифрой 2 искусственная
характеристика. В режиме искусственной
механической характеристики вводится
понятие номинального сопротивления,
представляющего собой сопротивление
RНОМ, каким должна
обладать цепь якоря двигателя, чтобы
при подведенном к неподвижному якорю
напряжении UНОМ ток
в цепи якоря был бы номинальным IЯНОМ:
а
рис.3 цифрой 1 обозначена естественная
характеристика, а цифрой 2 искусственная
характеристика. В режиме искусственной
механической характеристики вводится
понятие номинального сопротивления,
представляющего собой сопротивление
RНОМ, каким должна
обладать цепь якоря двигателя, чтобы
при подведенном к неподвижному якорю
напряжении UНОМ ток
в цепи якоря был бы номинальным IЯНОМ:
Задача 2: Рассчитать координаты необходимые для построения естественной и искусственной механической характеристики ДПТНВ типа ПБС-62, если внешнее сопротивление в цепи якоря rдоб=2,4Ом.
Номинальные данные двигателя:
— мощность РНОМ=4,7кВт;
— напряжение UНОМ=220В;
— частота вращения nНОМ=1000 об/мин;
— КПД ηНОМ=87%.
Решение:
Номинальный ток якоря:
Номинальное сопротивление двигателя:
Сопротивление обмоток в цепи якоря:
Пограничная частота вращения:
Номинальный момент:
Частота вращения в режиме искусственной механической характеристики при номинальном моменте нагрузки:





7) По координатам n0=1069об/мин, nНОМ=1000 об/мин и MНОМ=44,9Н·м строят естественную механическую характеристику; а по координатам n0=1069об/мин, n’НОМ=714 об/мин и MНОМ=44,9Н·м, строят искусственную механическую характеристику.
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДПТ
ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
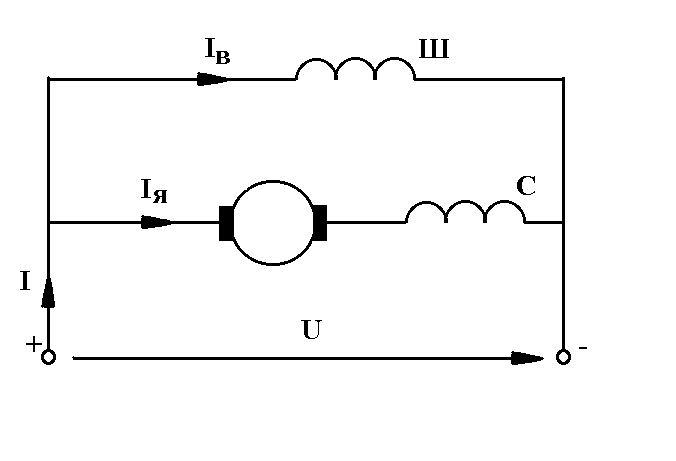
На рис.4 представлена схема включения ДПТ последовательного возбуждения.
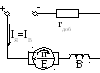
Рис.4. Схема ДПТ последовательного возбуждения
Отличительный признак – ток нагрузки двигателя (ток якоря) является током возбуждения IЯ=IB=I, поэтому магнитный поток Ф зависит от нагрузки:
- ,
 ,
,где С – коэффициент пропорциональности.
При том вращающий момент
- ,
 ,
,то есть пропорционален квадрату тока, тогда ток
- .
 .
.Число оборотов:
- ,
 ,
,следовательно механическая характеристика ДПТ криволинейна.
Особенности характеристики:
Механическая характеристика не пересекает ось координат, так как при отсутствии нагрузки двигателя частота вращения возрастает неограниченно. По той причине не допускается работа ДПТПВ при нагрузке M≤0?25MНОМ.
При малых нагрузках частота вращения значительна (характеристика мягкая). При нагрузках близких к номинальной, характеристика становится более жесткой (пологой). Объясняется это тем, что при токе нагрузки IЯ≥0,8IЯНОМ магнитная система насыщается и магнитный поток возбуждения остается практически неизменным.
Для построения естественной механической характеристики n=f(M) ДПТПВ по универсальным характеристикам поступают следующим образом:
1) Определяют фактические номинальные значения тока IЯ(A), момента M(Н·м) и частоты вращения n об/мин.
2) Задаются рядом относительных значений тока нагрузки и по универсальной характеристики определяют относительные значения момента М* и частоты n*
3) Сроят естественную механическую характеристику, пересчитав через номинальное и относительное значения требуемых параметров с целью определения текущих.
Задача 3: Построить естественную механическую характеристику для ДПТПВ с техническими данными:
— IЯНОМ=19A;
— PНОМ=3кВт;
— UНОМ=220B;
— nНОМ=1130 об/мин.
Решение:
Номинальное значение момента

2) По полученным данным строим естественную механическую характеристику (график проходящий через точку А1)
При расчете искусственных характеристик решают так же одну из двух задач:
Либо по заданным координатам точки на искусственной механической характеристики определяют сопротивление резистора rдоб, необходимое для получения требуемой искомой характеристики.
Либо по заданным сопротивлениям rдоб определяют координаты точек искусственной характеристики.
3) Задаемся относительными значениями тока нагрузки и по универсальным естественным характеристикам определяем величины, необходимые для построения естественной характеристики двигателя сначала в относительных единицах, затем в именованных.
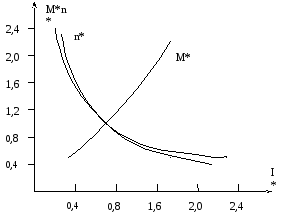
Рис.5. универсальная естественная характеристика
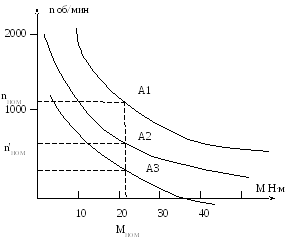
Рис.6. График естественной и искусственных механических характеристик
Задача 4: Для двигателя последовательного возбуждения (см задача выше) определить сопротивление резистора rдоб, при включении которого в цепь якоря искусственная механическая характеристика пройдет через т А2 с координатами: MНОМ=25,35Н·м, nНОМ=750 об/мин.
Решение:
Номинальное сопротивление двигателя:
КПД в номинальном режиме:
Сопротивление обмоток в цепи якоря:
Сопротивление резистора rдоб


ВАРИАНТЫ ЗАДАНИЙ
Для всех задач использовать формулировку как в приведенных примерах. Технические характеристики двигателей выбрать из таблицы согласно вариантам.
Таблица 1 – Технические характеристики двигателей
№ | РН, кВт | Uн, В | КПД, % | nH, об/мин | RЯЦ, Ом |
1 | 2 | 3 | 4 | 5 | 6 |
1 | 4 | 220 | 72.3 | 900 | 4.06 |
2 | 3.45 | 220 | 69.3 | 750 | 5.96 |
3 | 2 | 220 | 57.6 | 450 | 9.33 |
4 | 4.25 | 220 | 68 | 730 | 4.57 |
5 | 3 | 220 | 60.3 | 475 | 7.24 |
1 | 2 | 3 | 4 | 5 | 6 |
6 | 3.55 | 220 | 60.1 | 425 | 6.62 |
7 | 15 | 220 | 77.9 | 1400 | 0.278 |
8 | 7.5 | 220 | 76 | 1000 | 1.93 |
9 | 6 | 220 | 74 | 875 | 3.09 |
10 | 4.25 | 220 | 65 | 580 | 4.79 |
11 | 11 | 220 | 78.5 | 1060 | 1.23 |
12 | 8.5 | 220 | 76 | 875 | 2.08 |
13 | 8 | 220 | 68 | 600 | 2.93 |
14 | 11 | 220 | 76 | 800 | 1.77 |
15 | 8.5 | 220 | 68 | 515 | 2.76 |
16 | 15 | 220 | 80.7 | 850 | 1.31 |
17 | 11 | 220 | 70.5 | 530 | 2.23 |
18 | 15 | 220 | 75.3 | 580 | 1.65 |
19 | 17 | 220 | 73 | 500 | 1.53 |
20 | 20 | 220 | 75 | 475 | 1.36 |
ВРЕМЯ, ОТВЕДЕННОЕ НА ВЫПОЛНЕНИЕ РАБОТЫ
1. Подготовка к работе – 1,0 акад.час
2. Выполнение работы – 2,0 акад.часа
3. Оформление работы – 1,0 акад.час
ЛИТЕРАТУРА
Кацман М.М. Электрический привод: Учебник для студ. образоват. учреждений сред. проф. образования. – М.: Издательский центр «Академия», 2005. – 384с. ISBN 5-7695-2060-4
Практикум по электротехнике и электронике. Учебное пособие для вузов / Кононенко В.В., Мишкович В.И., Муханов В.В., Планидин В.Ф., Чеголин П.М. / Под ред. В.В.Кононеко. – Ростов н/Д. Феникс, 2007. – 384с.
СОДЕРЖАНИЕ
Введение 2
Расчет механических характеристик ДПТ независимого возбуждения 2
Расчет механических характеристик ДПТ последовательного
возбуждения 8
Варианты заданий 12
Время, отведенное на выполнение работы 13
Литература 13
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Методические указания к выполнению практической работы по
дисциплине «Электромеханические системы» для студентов
специальности 210100 всех форм обучения
Составили: Мефедова Юлия Александровна
Рецензент Т.Н. Скоробогатова
Редактор Л.В.Максимова
Корректор А.М.Рогачева
Подписано в печать | Формат 60х84 1/16 | |
Бумага тип. | Усл. печ. л. 1 | Уч.-изд.л. 0,875 |
Тираж 100 экз. | Заказ | Бесплатно |
Саратовский государственный технический университет
410054, г.Саратов, ул.Политехническая, 77
Копипринтер БИТТиУ, 413840, г.Балаково, ул.
Чапаева, 140



16