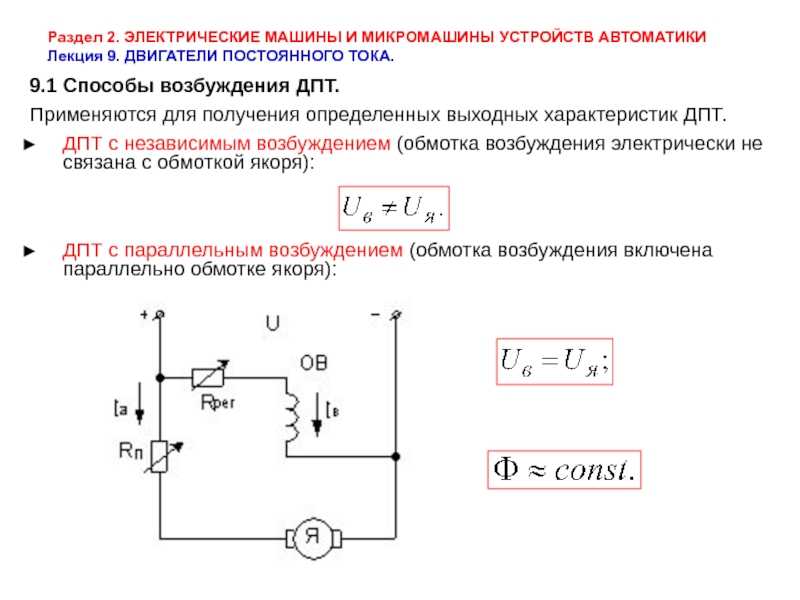
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iвне зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Рисунок 1Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода
 13, а (график 1 Rдоб = 0).
13, а (график 1 Rдоб = 0).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.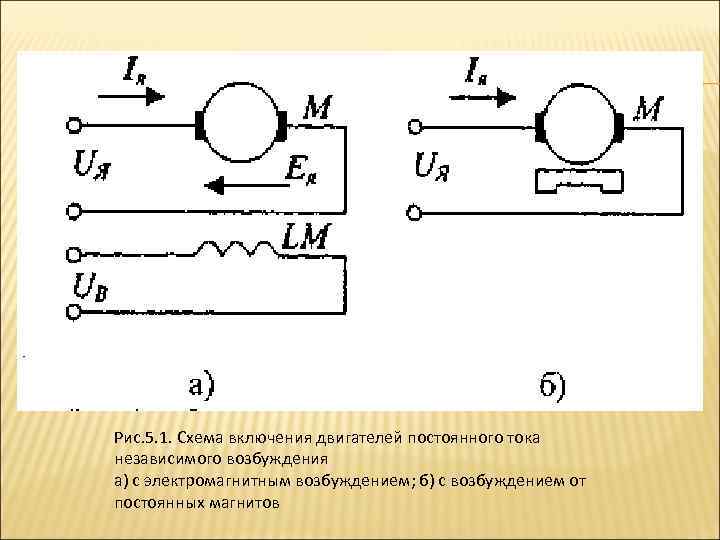
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в
откуда:
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя  Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения
Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
22.12.2013
Электрические машины,Машины постоянного тока,Двигатель постоянного тока,ДПТ,ДПТ НВ
Электрические машины постоянного тока
Двигатель постоянного тока с независимым возбуждением: конструкция и работа
Содержание
- 1 Особенности конструкции
- 2 Физические процессы
- 3 Рабочие режимы
- 4 Этап пуска
- 5 Способы торможения
- 6 Механические характеристики
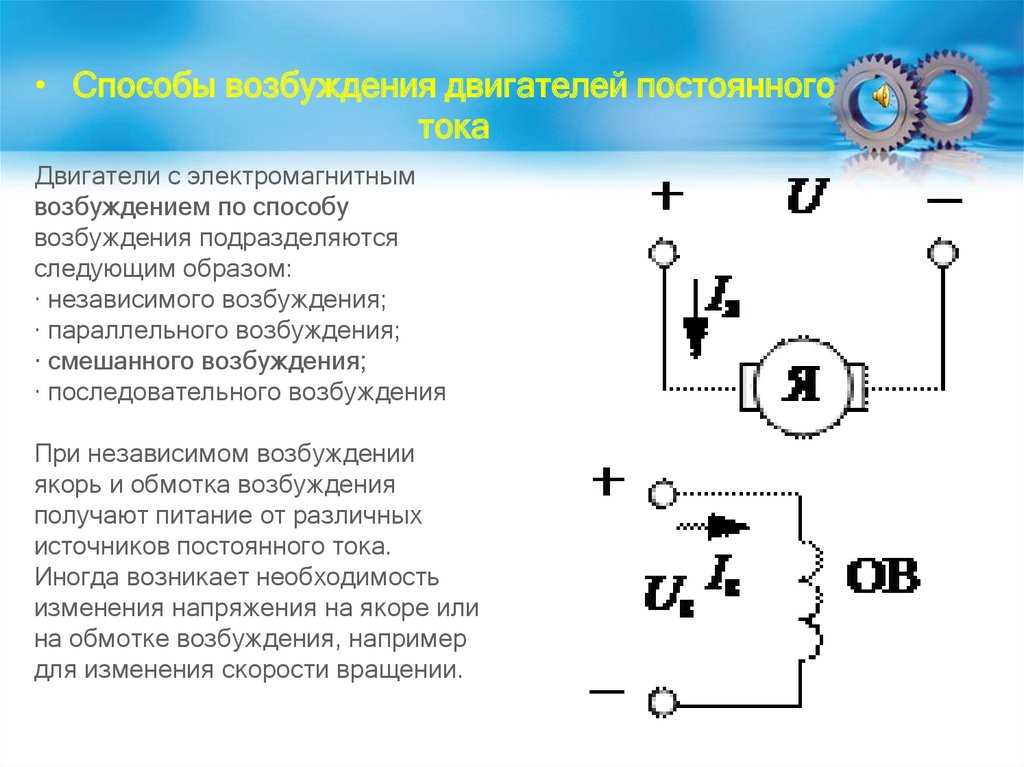
Электроприводы с сетевым питанием с постоянными токовыми параметрами могут иметь четыре вида подключения индуктора. Это существенно влияет на силовые и электрические характеристики электропривода. Один из таких способов – отдельное подключение электрообмоток с питанием от внешней электроцепи.
Это существенно влияет на силовые и электрические характеристики электропривода. Один из таких способов – отдельное подключение электрообмоток с питанием от внешней электроцепи.
Автоматическое управление электроприводами улучшает рабочие процессы. Надежная автоматизация требует оптимизации не только технической составляющей, но и принципов управления. Для определения последних используется математическая модель двигателя силовой части. Электрические приводные агрегаты предназначены для преобразования электроэнергии в механическую работу. От того, какой способ действия заложен в электрооборудование, зависит его конструкция. На основании вида включения электроцепи статора выделяют четыре типа приводов. К ним относятся двигатели постоянного тока независимого и параллельного возбуждения, а также устройства с последовательным и смешанным включением цепей. О независимом типе приводов будет рассказано в этой статье.
Особенности конструкции
Электродвигатель, работающей от сети с неизменной токовой величиной (ДПТ), как и асинхронный или синхронный двигатель с изменяемым напряжением электропитания, содержит два основных блока: неподвижный статор (или индуктор) и вращающийся якорь (или ротор).
- станину, выполненную из литой стали;
- главные полюсы, осуществляющие формирование основного магнитного поля;
- дополнительных полюсов, обеспечивающие хорошую коммутацию.
Стальная станина служит надежным основанием электромотора, на котором крепятся все неподвижные элементы. Она также выступает структурным звеном магнитопровода. Главный полюс состоит из шихтованного сердечника, закрепленного на основании болтовым соединением, и катушек цепи. Его изготовляют в массиве или набирают из электротехнической стали. Для формирования требуемого распределения магнитных силовых линий сердечник оснащается полюсным наконечником. В отдельных местах производят двигатель постоянного тока с распределенными компенсационными электропроводами, размещаемыми в пазах сердечников.
Электроцепи главного полюса конструктивно выполняются в виде сосредоточенных катушек и могут питаться либо от сетевого источника, либо от зажимов якорной обмотки.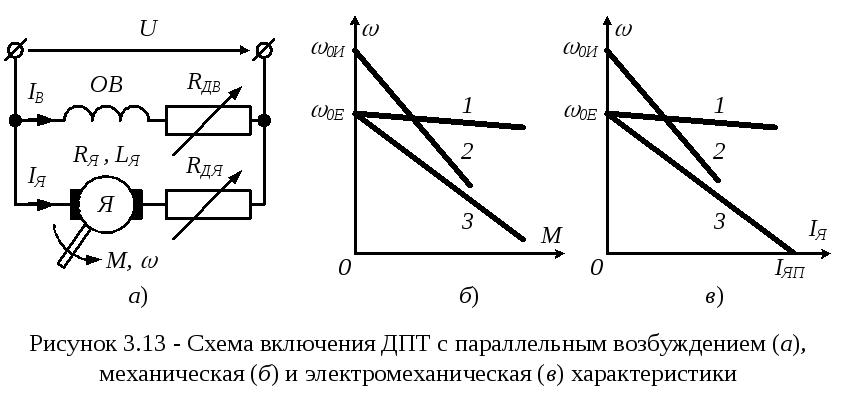
Устройство подвижной части электропривода – якоря – предусматривает применение:
- зубчатого сердечника, выполненного из листовой электротехнической стали;
- коллектора, собранного из изолированных друг от друга клинообразных медных пластин.
В пазы на лицевой поверхности зубчатого сердечника укладывается электроцепь ротора и коллектора, насаженного на роторный вал. Коллекторный механизм – это полое изделие цилиндрической формы. Соединение проводов якоря с коллекторным блоком производится к каждой медной пластине двумя концами отдельных частей роторной электрообмотки.
На коллекторе, в щеткодержателях размещаются неподвижные щетки, посредством которых роторные проводники соединяются с центральной электрической цепью. Таким образом обеспечивается независимое возбуждение тяговых двигателей. Щеткодержатель представляет собой щеточный аппарат с траверсой, на котором закреплены щеточные пальцы. Траверса крепится к стационарной части и допускает поворот на некоторый угол вокруг оси вала для регулирования положения щеток.
Таким образом обеспечивается независимое возбуждение тяговых двигателей. Щеткодержатель представляет собой щеточный аппарат с траверсой, на котором закреплены щеточные пальцы. Траверса крепится к стационарной части и допускает поворот на некоторый угол вокруг оси вала для регулирования положения щеток.
Коллекторные двигатели постоянного тока симметричны и обладают либо вертикальной, либо горизонтальной осью симметрии. Первая проходит посередине главных полюсов, вторая – межполюсного пространства. Поперечная ось носит название геометрической нейтрали приводного агрегата.
Существует и другой тип электродвигателя – вентильно — приводный механизм или бесколлекторный электропривод. Его отличие состоит в замене щеточно-коллекторного узла на полупроводниковый коммутатор. Это позволяет получать практические достоинства: высокий КПД, надежность, широкий диапазон мощности, пожарную безопасность.
Физические процессы
Действие эл/привода постоянного тока с независимым возбуждением основано на свойствах находящихся под напряжением проводников в магнитном поле.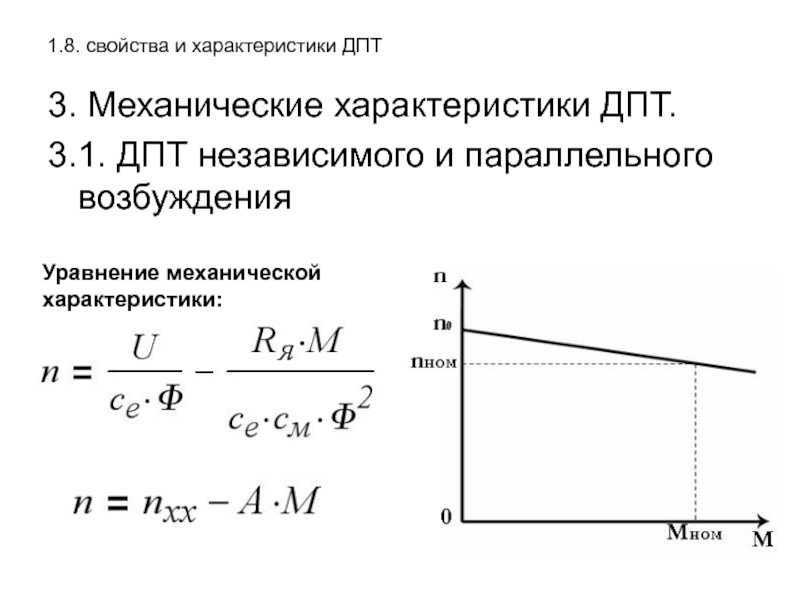 Наглядно это демонстрирует металлическая рамка, подключенная к питающей сети и размещенная в магнитном пространстве. Находясь под напряжением, она начинает вращаться. Это связано с появлением момента при взаимодействии электротока и магнитного поля. На базе этого явления был построен коллекторный двигатель.
Наглядно это демонстрирует металлическая рамка, подключенная к питающей сети и размещенная в магнитном пространстве. Находясь под напряжением, она начинает вращаться. Это связано с появлением момента при взаимодействии электротока и магнитного поля. На базе этого явления был построен коллекторный двигатель.
Структурная схема ротора предусматривает использование аналогичных токопроводящих рамок, которые формируют роторную эл/обмотку.
Источником магнитных силовых линий служит индуктор с намотанными на его полюсах проводником.
Исследование двигателя постоянного тока показало зависимость мощностных и электро-показателей электромотора от метода подсоединения обмоток индукторного устройства. Руководствуясь определенной схемой включения цепи индуктора, различают последовательное, параллельное, смешанное и независимое возбуждение тяговых двигателей. Приведенные варианты структурной организации индукторного устройства реализовываются в разных типах моторов. Так, схема включения двигателя постоянного тока независимого возбуждения является основой шунтового агрегата, последовательный метод нашел применение в сериесном электромоторе, а смешанный – в компаундном ДПТ.
Рабочие режимы
Преобразование электроэнергии в механическую энергию производится в соответствии с процессами работы двигателя постоянного тока. Они определяются на основе взаимодействия электротока проводников роторного проводника с полем, созданным результирующей магнитодвижущей силой (МДС) всех эл/обмоток привода. Результатом такого взаимодействия является возникновение электромагнитных воздействий на якорные эл/проводники. Под воздействием этих сил возникает электромагнитный момент, обеспечивающий круговое движение вала.
Электродвигатель постоянного тока в любой период времени работает в соответствии с характеристиками и знаком моментных показателей, действующих на вращающийся узел со стороны связанного с ним механизма. В связи с этим выделяют следующие основные режимы работы двигателя:
- двигательный;
- тормозной;
- генераторный.
Каждый из них имеет свои особенности. Двигательный (основной), например, характеризуется совпадением направления электромагнитного момента приводной установки со скоростью, а также встречным направлением ЭДС якоря и его электротока.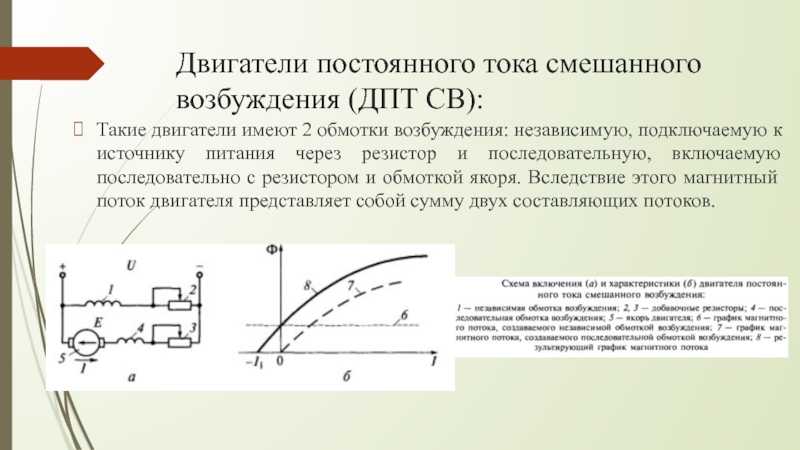 Тормозной принцип работы тесно связан с генераторным и может реализовываться тремя разными методиками. При торможении также вероятен реверс двигателя постоянного тока.
Тормозной принцип работы тесно связан с генераторным и может реализовываться тремя разными методиками. При торможении также вероятен реверс двигателя постоянного тока.
Этап пуска
Пуск двигателя постоянного тока – это один из самых ответственных этапов функционирования электродвигателя, во время которого повышается риск выхода из строя щеточно-коллекторного узла и даже его возгорания. Запуск всегда начинается с режима короткого замыкания, который характеризуется опасным уровнем начальной токовой нагрузки. Это объясняется наличием электросопротивления только в якорной электроцепи машины. При подключении оборудования к питающей сети электродвижущая сила в роторе не формируется, поскольку он неподвижен.
На старте коллекторный двигатель воспринимает чрезмерные моментные воздействия, инициирующие удары на механические элементы привода. В отдельных случаях имеет место их физическое разрушение. Действие высокого момента на старте продолжается до тех пор, пока роторный вал не наберет нужные обороты.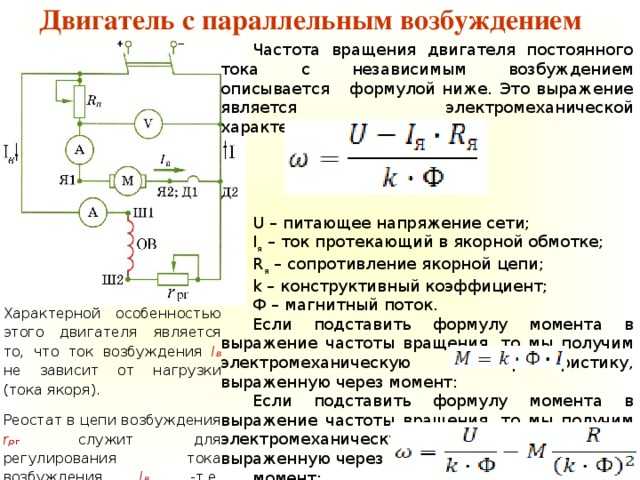 Чтобы двигатель с независимым возбуждением не воспринимал усилия, превышающие допустимый уровень, важно правильно рассчитать электросопротивление.
Чтобы двигатель с независимым возбуждением не воспринимал усилия, превышающие допустимый уровень, важно правильно рассчитать электросопротивление.
Какими бы ни были способы пуска двигателя постоянного тока, запуск электромашины должен выполняться с соблюдением двух условий:
- величина моментной нагрузки не должна превышать момент статического усилия;
- максимальные токовые и моментные показатели должны быть меньше допустимых пределов.
Для обеспечения плавного и быстрого пуска индукторный двигатель с сетевым подключением запускают многоступенчатым способом. Количество ступеней выбирается произвольно, оптимально – не более пяти. Схематично пуск двигателя постоянного тока представлен на рисунке:
Для многоступенчатого пуска определяют максимальное или минимальное значение пускового момента: Мп мин = (1,2–1,5) Мс, при этом Мп макс ≤ Мдоп. Каждая ступень имеет собственный показатель. Во время подключения происходит скачок моментной величины до максимума и двигатель с независимым возбуждением начинает разгон. После достижения минимального порога он переключается и часть электросопротивления выводится из роторной эл/цепи. Затем усилие снова увеличивают до Мп макс и цикл повторяется пока мотор не достигнет уровня рабочей скорости.
После достижения минимального порога он переключается и часть электросопротивления выводится из роторной эл/цепи. Затем усилие снова увеличивают до Мп макс и цикл повторяется пока мотор не достигнет уровня рабочей скорости.
Способы торможения
Торможение двигателя постоянного тока реализуется разными методами:
- рекуперативным;
- противовключением;
- динамическим.
Рекуперативный способ возникает в тех случаях, когда обороты электромашины становится больше скорости идеального холостого хода (ХХ). Поскольку в этом режиме частота вращения становится выше частоты идеального ХХ, электродвижущая сила ДПТ превышает напряжение питания. Соответственно, электропоток индуктора изменяет свое направление, и электромотор становится генератором, работающим параллельно с сетью. Снижение оборотов возникает только за счет переключения привода на другую характеристику. Рекуперативное торможение не приводит к полной остановке вращающегося механизма, а только ограничивает его частоту вращения. Такой режим возможен только у двигателя с независимым возбуждением.
Такой режим возможен только у двигателя с независимым возбуждением.
При противовключении уменьшение оборотов возникает в тех случаях, когда электродвигатель ориентирован на работу в одном направлении, а якорь под воздействием внешнего момента или сил инерции вращается в противоположную сторону. Торможение обеспечивается изменением полярности питания якорной обмотки. Это может вызвать недопустимо большое токовое значение якоря. Для ограничения этого показателя в якорную электроцепь включают резистор с сопротивлением в два раза больше, чем максимальное электросопротивление пускового реостата.
Двигатели с торможением противовключением способны быстро останавливаться в заданный промежуток времени. Среди недостатков отмечают существенные потери по причине больших поправочных электросопротивлений, а также наличие момента при нулевой скорости. Это вызывает затруднения в автоматизации тормозного режима, поскольку может возникнуть реверс двигателя постоянного тока. Поэтому противовключение предпочтительно в реверсивных электрических агрегатах.
Принцип действия динамического торможения основывается на отключении цепи ротора электромотора от питающей сети и ее замыкании на тормозном сопротивлении. Останавливаться подобным способом могут двигатели постоянного тока независимого и параллельного возбуждения, а также машины с включением последовательного вида. Процесс снижения оборотов и рабочие характеристики двигателя одинаковы. Они действуют по принципу генератора, работающему на стабильное сопротивление. В обмотке якоря присутствует только электродвижущая сила, и движение заряженных частиц изменяет направление.
Характеристики двигателя постоянного тока независимого возбуждения, в том числе значение токовой и моментной нагрузки, напрямую зависят от тормозного сопротивления. Чем оно меньше, тем величина моментного и токового усилия будет больше. Динамический процесс торможения приводит к полному останову, но по сравнению с противовключением его эффективность заметно ниже.
Механические характеристики
Для определения свойств электромашины для электропривода ориентируются на его технические данные. Наиболее информационным параметром является механическая характеристика двигателя (МХД), показывающая зависимость частоты вращения электромашины от развиваемой ею момента, что соответствует записи n = f(M). При необходимости связывания работы мотора с сетевым питанием полезными будут электромеханические показатели. Они выражают зависимость между оборотами и уровнем электротока в цепях электродвигателя. Функция в этом случае выглядит следующим образом: n =f(I).
Наиболее информационным параметром является механическая характеристика двигателя (МХД), показывающая зависимость частоты вращения электромашины от развиваемой ею момента, что соответствует записи n = f(M). При необходимости связывания работы мотора с сетевым питанием полезными будут электромеханические показатели. Они выражают зависимость между оборотами и уровнем электротока в цепях электродвигателя. Функция в этом случае выглядит следующим образом: n =f(I).
Исследование двигателя постоянного тока позволило выявить закономерность между физическими величинами и получить следующее уравнение МХД:
n = nₒ – Δn,
где:
nₒ=U/(Ce*Ф) показатель частоты вращения выходного вала ДПТ при идеальном холостом ходе;
∆n= (M*Rx)/(Ce*Cm*Ф² ) изменение параметра частоты вращения вала при приложении механической нагрузки.
Из формулы МХД видно, что регулирование скорости двигателя постоянного тока независимого возбуждения при неизменном значении моментной нагрузки можно осуществлять одним из следующих методов:
- изменяя показатель напряжения на роторе;
- регулируя уровень электросопротивления в якорной цепи;
- воздействуя на возбуждающий процесс в моторе.


Изменение якорного напряжения выполняют реостатом (на рисунке позиция «а») или усилительно-преобразовательным устройством («б»), при этом значение возбуждающего электропотока является константой.
Это выражается графической зависимостью:
Регулирование сопротивления в роторе выполняют изменением параметра добавочного электросопротивления, включённого последовательно в якорную цепь, как показано на рисунке:
Третий метод изменения оборотов путем воздействия на возбуждающий электропоток осуществляется включением в электроцепь добавочного реостата. При этом напряжение остается константой. Двигатель постоянного тока с подобным типом регулирования имеет следующую электросхему включения и зависимость:
График представляет собой прямую линию, угол наклона которой к оси абсцисс зависит от показателя возбуждающего потока и электросопротивления ротора. При уменьшении электропотока и увеличении сопротивления МХД становится круче.
Двигатели постоянного тока с установившимся рабочим режимом обладают статическими данными. То есть величина их скорости одинакова при равенстве моментов машины и приводимого узла. Когда имеют место переходные режимы, характеристики называют динамическими. Машины постоянного тока с номинальным возбуждающим потоком и отсутствием дополнительных электросопротивлений в электроцепях обмоток обладают естественными МХД. Двигатель постоянного тока с параметрами, отличающимися от номинальных, или ДПТ с добавочным сопротивлением имеют искусственные характеристики. Качественная оценка МХД производится показателем жесткости, который делится на три категории:
То есть величина их скорости одинакова при равенстве моментов машины и приводимого узла. Когда имеют место переходные режимы, характеристики называют динамическими. Машины постоянного тока с номинальным возбуждающим потоком и отсутствием дополнительных электросопротивлений в электроцепях обмоток обладают естественными МХД. Двигатель постоянного тока с параметрами, отличающимися от номинальных, или ДПТ с добавочным сопротивлением имеют искусственные характеристики. Качественная оценка МХД производится показателем жесткости, который делится на три категории:
- идеально жесткие;
- жесткие;
- мягкие.
В первом случае коллекторный двигатель работает с неизменной частотой вне зависимости от нагрузки. Во втором эти данные при действии номинального моментного усилия уменьшается до 25% от скорости холостого хода. В третьем они снижаются более чем на 25%. Двигатель постоянного тока независимого возбуждения обладает жесткой характеристикой, благодаря чему способен обеспечивать надежный электропривод станочного оборудования, насосов, вентиляторов.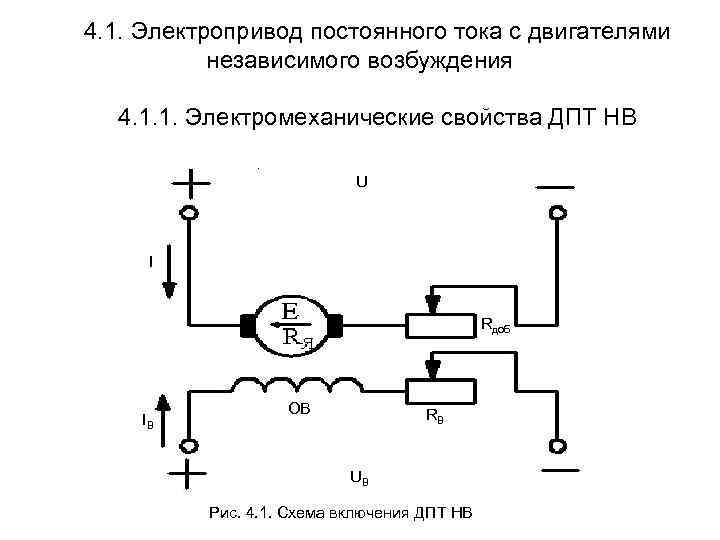
Машины постоянного тока с независимым и параллельным возбуждением
- Основы Главная
- Обзор EM Fields
- Основные машины
- Машины постоянного тока
- Машины переменного тока
- Улучшение дизайна
- Напряжение и крутящий момент
- Коммутация
- Реальные машины
- Раздельное и шунтирующее поле Поле серии
- Мощность
- Примеры
Модель эквивалентной схемы якоря
машина постоянного тока показана выше. Наведенное напряжение якоря,
\(E_A\) представлен источником напряжения,
подключен через 2 щетки к остальной части цепи. Арматура
сопротивление обмотки \(R_A\) и напряжение на клеммах \(V_T\).
Арматура
сопротивление обмотки \(R_A\) и напряжение на клеммах \(V_T\).
Поведение цепи якоря зависит от потока в машина, которая традиционно управляется обмоткой возбуждения. Некоторые машины постоянного тока сконструированы с полем постоянного магнита (ПМ), что приводит к постоянному потоку. В машине постоянного тока с постоянными магнитами модель цепи якоря является полной моделью цепи. Мы рассмотрим три типа машин постоянного тока с раневым полем. В машине раненого поля, поток создается обмоткой возбуждения. Типы машин, которые мы рассмотрим:
- Отдельное возбуждение
- Шунт Возбужденный Серия
- В восторге
С независимым возбуждением
В машинах с независимым возбуждением обмотка возбуждения независимая обмотки якоря. Уравнения контура напряжения якоря и обмотки возбуждения:
\[ \begin{выровнено} V_T & =E_A+I_A R_A \\ V_F & =I_F R_F \end{выровнено} \]
Сопротивление цепи возбуждения \(R_F\)
состоит из фактического сопротивления обмотки, \(R_{поле}\)
и переменное сопротивление, \(R_{adj}\), которое может
использоваться для управления током возбуждения.
Поток, создаваемый обмоткой возбуждения, является нелинейной функцией текущий:
\[ \фи=\фи(I_F) \]
При более низких уровнях тока зависимость поток-ток является линейной, но по мере увеличения тока железо в автомате начинает насыщаться. ток поля (и, следовательно, потоком) можно управлять либо регулировкой сопротивления цепи возбуждения, либо напряжение питания возбуждения.
Для машины с независимым возбуждением ток якоря равен току якоря терминальный ток.
С шунтовым возбуждением
С шунтовым возбуждением возбужденная машина, с ограничением, что напряжение питания обмотки возбуждения \(V_F\) равно обмотке якоря напряжение питания, \(V_T\). В этом случае терминал ток определяется как
\[ I_T=I+A+I_F \]
Характеристика крутящий момент-скорость
Подстановка уравнений напряжения якоря и крутящего момента
\[ \begin{выровнено} E_A & =k\phi\omega \\ \ тау & = к \ фи I_A \end{выровнено} \] 92}\тау \]
При анализе уравнения крутящего момента становится очевидным, что
поле машины с независимым возбуждением всегда должно включаться до
напряжение подается на цепь якоря. Если ток возбуждения и поток
ноль, машина теоретически разгонится до бесконечной скорости. (В действительности,
трение будет ограничивать скорость, но может произойти повреждение двигателя. Если здесь
равен нулю, напряжение якоря равно нулю, и приложено полное напряжение на клеммах.
через сопротивление якоря, что приводит к большим токам и возможному перегреву и
выгорание машины).
Если ток возбуждения и поток
ноль, машина теоретически разгонится до бесконечной скорости. (В действительности,
трение будет ограничивать скорость, но может произойти повреждение двигателя. Если здесь
равен нулю, напряжение якоря равно нулю, и приложено полное напряжение на клеммах.
через сопротивление якоря, что приводит к большим токам и возможному перегреву и
выгорание машины).
Узнайте о двигателях с автономным и независимым возбуждением
1
Сохранить
Скачать публикацию в формате PDF Двигатели постоянного токаприменяются в различных приборах, от промышленного оборудования до бытовой техники. Хотя принцип их работы остается прежним, существуют разные типы двигателей постоянного тока. Двигатели постоянного тока можно разделить на четыре категории в зависимости от генерации магнитного поля и схемы катушки.
Продолжайте читать, чтобы узнать больше о работе, применении и типах двигателей постоянного тока, таких как двигатели с постоянными магнитами, с независимым возбуждением, с самовозбуждением и комбинированные двигатели.
Типы двигателей постоянного тока
Существуют различные типы двигателей постоянного тока, каждый из которых обладает полезными характеристиками, полезными для конкретных приложений. Изучим их подробно.
Двигатели постоянного тока с постоянными магнитами
Двигатели постоянного тока с постоянными магнитами используют сильные магниты, прикрепленные к ярму для обеспечения устойчивого магнитного потока. Якорь имеет обмотки возбуждения, коллектор и щетки. Они относятся к типам небольших двигателей постоянного тока, которые используются в самых разных областях, от игрушек до приводов и электроприборов. Для получения большей мощности в этих двигателях постоянного тока часто используются мощные магниты, изготовленные из редкоземельных сплавов, таких как неодим.
Двигатель постоянного тока с независимым возбуждением
В двигателях постоянного тока с независимым возбуждением для создания стационарного магнитного поля используется катушка возбуждения. Однако якорь и катушки возбуждения электрически отделены друг от друга. Они питаются отдельно и не мешают друг другу. Однако выходная мощность двигателя представляет собой общую сумму двух.
Однако якорь и катушки возбуждения электрически отделены друг от друга. Они питаются отдельно и не мешают друг другу. Однако выходная мощность двигателя представляет собой общую сумму двух.
Двигатели постоянного тока с самовозбуждением
Двигатели постоянного тока с самовозбуждением имеют якорь и катушку возбуждения, которые соединены последовательно или частично последовательно, параллельно или частично параллельно. У них также есть единый источник энергии. Существует два типа двигателей постоянного тока с самовозбуждением: серийный двигатель постоянного тока и шунтирующий двигатель постоянного тока.
Двигатель постоянного тока серии В двигателях постоянного тока с последовательным возбуждением обмотка возбуждения и катушка якоря последовательно подключаются к источнику питания. Это означает, что через катушку и якорь протекает один и тот же ток. Поскольку эти типы двигателей могут работать как с постоянным, так и с переменным током, их еще называют универсальными двигателями.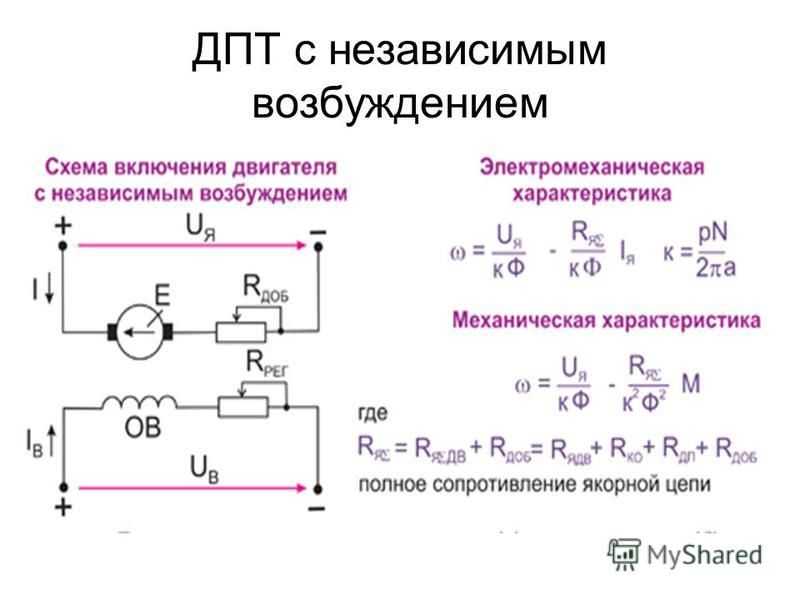 Серийные двигатели всегда вращаются в одном направлении, и их скорость зависит от механической нагрузки.
Серийные двигатели всегда вращаются в одном направлении, и их скорость зависит от механической нагрузки.
Шунтирующий двигатель постоянного тока
В двигателях постоянного тока с параллельным возбуждением обмотка якоря и катушка возбуждения подключаются параллельно к источнику питания. Параллельное соединение означает, что ток делится между двумя компонентами. Шунтовой двигатель постоянного тока имеет постоянную скорость, которая не изменяется при изменении механической нагрузки.
Составной двигатель
Составные двигатели постоянного тока используют как шунтирующие, так и последовательные обмотки возбуждения. Обмотка якоря включена последовательно, а катушки возбуждения могут быть шунтирующими или последовательными. Эти двигатели далее подразделяются на короткошунтовые и длинношунтовые, а также накопительные и дифференциальные двигатели.
Двигатель постоянного тока с коротким шунтом
В двигателе постоянного тока с коротким шунтом шунтирующая обмотка возбуждения параллельна обмотке якоря; однако он не параллелен последовательной обмотке возбуждения.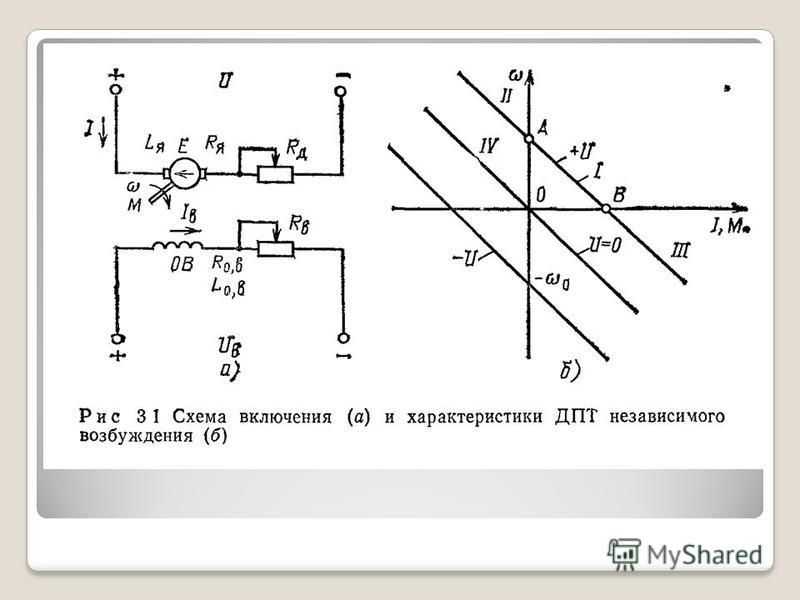
Двигатель постоянного тока с длинным шунтом
В двигателе постоянного тока с длинным шунтом шунтирующая обмотка возбуждения параллельна как якорю, так и последовательной обмотке возбуждения.
Двигатель постоянного тока с накопительным возбуждением
В двигателе постоянного тока с накопительным возбуждением основная обмотка возбуждения соединена последовательно с обмоткой якоря. Здесь поток шунтирующего поля помогает потоку основного поля.
Двигатель постоянного тока с дифференциальным составом
В комбинированном двигателе постоянного тока шунтирующая обмотка возбуждения устроена таким образом, чтобы уменьшить влияние потока основной последовательной обмотки.
Применение двигателей постоянного тока
Применение двигателя постоянного тока зависит от требований к электрооборудованию и характеристик двигателя постоянного тока. Вот список областей, в которых используются рассмотренные выше двигатели:
Применение двигателей постоянного тока
- Краны
- Лифты и лифты
- Winching systems
- Hair driers
- Power tools
DC Shunt Motor Applications
- Windscreen wiper drives
- Drills
- Conveyers
- Fans
- Centrifugal pumps
- Blowers
Compound DC Motor Области применения
- Конвейеры
- Штамповочные машины
- Компрессоры
- Тяжелые строгальные станки
- Прокатные станы
- Presses
Permanent Magnet DC Motors
- Toys
- Starter motors
- Disc drivers
- Wheels chairs
Brushless DC Motor Applications
- Computer cooling fans
- Heating and ventilation
- Системы охлаждения в самолетах и транспортных средствах
- Ручные электроинструменты
Применение двигателей постоянного тока с независимым возбуждением
- Приводы в промышленном оборудовании
- Тяговые электродвигатели в поездах
- Сталепрокатные станы
Это суммирует различные типы двигателей постоянного тока, используемых во всех видах промышленных и коммерческих приложений.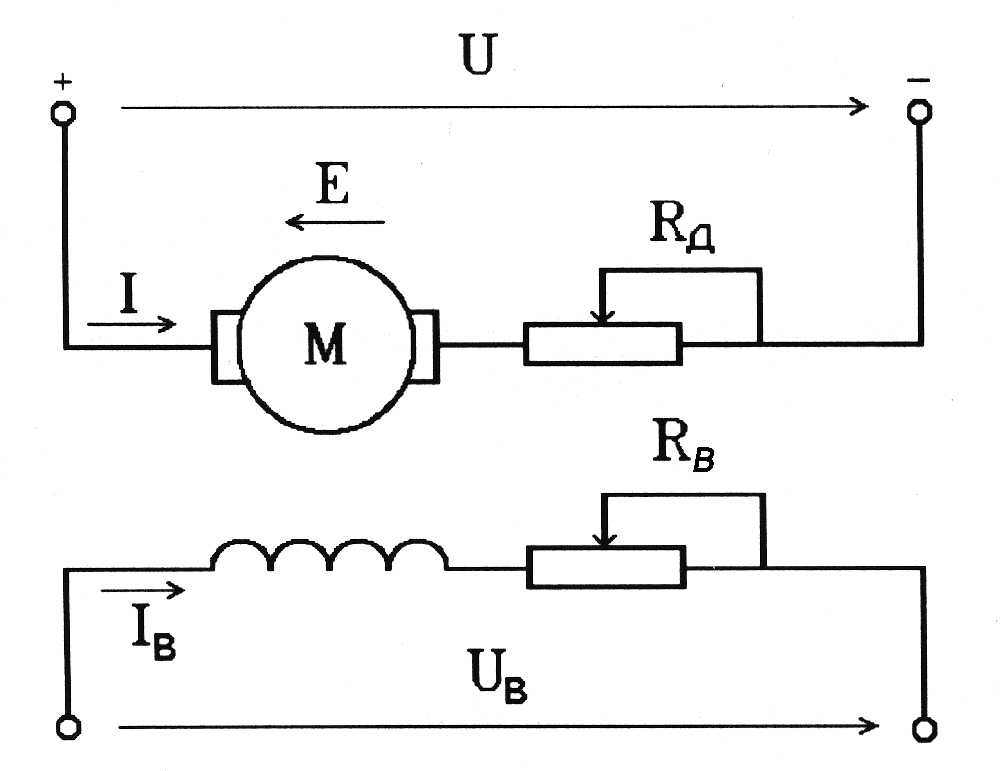 Вы также можете ознакомиться с другими разделами по физике. Загрузите приложение Testbook прямо сейчас, чтобы проверить свои знания и подготовиться к экзаменам!
Вы также можете ознакомиться с другими разделами по физике. Загрузите приложение Testbook прямо сейчас, чтобы проверить свои знания и подготовиться к экзаменам!
В.1 Сколько существует типов двигателей постоянного тока?
Ans.1 Существует четыре типа двигателей постоянного тока: с постоянными магнитами, с независимым возбуждением, с самовозбуждением и составные.
Q.2 Где используются двигатели постоянного тока?
Ответ 2 Двигатели постоянного тока используются во всех видах приложений, включая игрушки, электроинструменты, бытовую технику, промышленное оборудование, электромобили, приводы и т. д.
Q.3 Что такое принцип работы двигателя постоянного тока ?
Ответ 3 Двигатель постоянного тока работает по принципу магнитного эффекта электрического тока.