
Датчик положения распредвала: зачем нужен и как проверить
- Главная
- Статьи
- Лучше с ним, чем без него: зачем нужен и как проверить датчик положения распредвала
Автор: Михаил Баландин
Иногда современные машины упрекают в избыточной сложности. Мол, можно было бы сделать и попроще. Вот, например, этот датчик. Можно же без него обойтись? Хватает же для нормальной работы двигателя датчика положения коленвала? Теоретически – да. Но, как говорил Маяковский, «Ведь, если звезды зажигают, значит, это кому-нибудь нужно?». Нужно. И датчик положения распредвала тоже нужен.
ДПКВ и ДПРВ: что к чему?
Я не зря вспомнил про датчик положения коленвала: его задача очень близка к той, которую решает датчик положения распредвала. Да и устроены они практически одинаково. Так зачем тогда нужен второй датчик, который наблюдает за тем, как крутится распредвал?
Да и устроены они практически одинаково. Так зачем тогда нужен второй датчик, который наблюдает за тем, как крутится распредвал?
Было дело, когда моторы обходились и без него, полагаясь исключительно на данные датчика положения коленвала (ДПКВ). Всё было хорошо, но расход бензина в этом случае был заметно выше из-за попарно-параллельного режима впрыска топлива. То есть впрыск топлива проходил через две одновременно открытые форсунки. В одном цилиндре при этом топливо начинало работать (сгорать), а в другом расходовалось впустую. В век тотального озеленения моторов и буйства экологов такую растрату бензина терпеть было нельзя, и тогда в дополнение к ДПКВ появился датчик положения распредвала (ДПРВ). Алгоритм впрыска топлива изменился.
Теперь стала открываться только одна нужная форсунка – началась эпоха фазированного впрыска. Задача ДПРВ – дать понять блоку управления, что поршень в конкретном цилиндре подходит к верхней мёртвой точке, и сейчас туда надо брызнуть топливо через открытую форсунку. Остальные форсунки при этом открывать не надо.
Остальные форсунки при этом открывать не надо.
Теоретически этот датчик не так важен, как ДПКВ. Основные функции выполняет как раз датчик положения коленвала. Он сам способен определить скорость вращения коленвала и его положение в момент времени – то есть определить фазы. И внезапный выход из строя датчика положения распредвала не так страшен, как отказ ДПКВ. Чаще всего мотор лишь перейдёт в попарно-параллельный режим впрыска топлива, но колом не встанет (о симптомах отказа ДПРВ скажу чуть ниже подробнее). Но точная синхронизация с неработающим датчиком распредвала будет уже невозможной, и его придётся менять. Не зря же ДПРВ часто называют датчиком фаз, хотя это не совсем точно.
Так что он собой представляет и как его проверить?
Брат-близнец
Тут опять нельзя не вспомнить про датчик коленвала: датчики распредвала конструктивно точно такие же. И они тоже могут быть оптическими, магнитными (индуктивными) и датчиками Холла. Последние – наиболее распространённые, о них и пойдёт речь ниже. Вкратце напомню, что такое эффект Холла.
Вкратце напомню, что такое эффект Холла.
Был такой учёный американский дядя, которого звали Эдвин Холл. Он работал в Гарварде и как-то задался вопросом: а можно ли как-то изменить сопротивление проводника в магнитном поле? После ряда экспериментов он выяснил, что при помещении проводников с постоянным током в магнитные поля появляются разности потенциалов. Это явление назвали эффектом Холла, а возникающую разность потенциалов – холловским напряжением. Эффект Холла применяется очень широко. Например, в электронных компасах смартфонов. Но нас интересуют датчики Холла, которые используют этот эффект. Эти датчики реагируют на приближение металла, изменяя напряжение на сигнальном проводе. В качестве металла, который нужно приблизить к датчику, используется всё тот же задающий диск или отдельный репер на распредвале. В общем, система почти та же, что и у ДПКВ того же типа.
Конструктивно датчик положения распредвала тоже не сильно отличается от датчика коленвала. Основная его деталь – это катушка, на которую после включения зажигания приходит постоянное напряжение от бортовой сети – 12 вольт (на самом деле чуть больше, но для простоты – 12)..jpeg) Третий провод датчика – сигнальный. По нему в ЭБУ возвращается в среднем 90-95% напряжения. В момент прохождения репера около датчика напряжение на сигнальном проводе падает до значения ниже, чем в половину вольта (на разных машинах по-разному, но в среднем – 0,2-0,5 В). Это и есть сигнал на ЭБУ. И он заметно точнее, чем сигнал от датчика положения коленвала, а в моторах с фазовращателями он вообще единственный, который может точно указать фазы. Что будет, если сигнал пропадёт?
Третий провод датчика – сигнальный. По нему в ЭБУ возвращается в среднем 90-95% напряжения. В момент прохождения репера около датчика напряжение на сигнальном проводе падает до значения ниже, чем в половину вольта (на разных машинах по-разному, но в среднем – 0,2-0,5 В). Это и есть сигнал на ЭБУ. И он заметно точнее, чем сигнал от датчика положения коленвала, а в моторах с фазовращателями он вообще единственный, который может точно указать фазы. Что будет, если сигнал пропадёт?
Может, он, может, и нет
А будет всё просто: ЭБУ, пользуясь данными датчика положения коленвала, будет знать, когда поршни проходят верхнюю мёртвую точку. Но не будет знать, какой именно поршень к этой точке приближается. Чтобы мотор не заглох, ЭБУ отдаст форсункам команду переключиться с фазированного впрыска на попарно-параллельный. Работать мотор будет, но не в штатном режиме. Интересно, что неопытный водитель даже не всегда поймёт, что с ДПРВ случилась какая-то беда: Check Engine загорается не всегда, а потерю тяги новичок (в данном случае – не средство против шпионов и прочих либералов, а неопытный водитель) частенько просто не замечает. Он может и не заметить повышенный расход бензина.
Он может и не заметить повышенный расход бензина.
В более тяжёлых ситуациях Check Engine, конечно, загорится. Тут всё понятно – диагностика всё покажет. Кроме того, могут появиться и совсем неприятные симптомы: неровная работа на холостых оборотах, рывки при наборе скорости, «троение», а иногда мотор может и заглохнуть. Пуск тоже может быть затруднён.
Периодически симптомы умершего ДПРВ проявляются только на повышенных оборотах, но это случается довольно редко.
К сожалению, весь этот набор неприятностей не может однозначно говорить об отказе датчика распредвала. С этими же симптомами может умереть, например, катушка зажигания или бензонасос. Или что-то ещё – уж очень эти симптомы размыты. Но ведь как-то найти неисправность датчика надо… Тогда ищем!
«… смотреть могут не только лишь все, не каждый может это делать»
Честно говоря, диагностика этого датчика – штука не очень простая. Но попробуем что-нибудь сделать.
Начнём с самого простого и очевидного приёма – подключения сканера.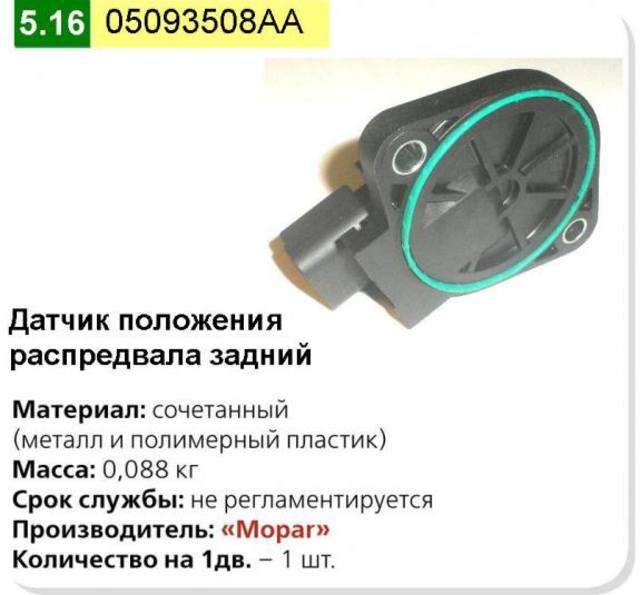 Для этого подойдёт даже недорогой сканер типа Rokodil ScanX, который несмотря на невысокую цену покажет все основные ошибки любого автомобиля.
Для этого подойдёт даже недорогой сканер типа Rokodil ScanX, который несмотря на невысокую цену покажет все основные ошибки любого автомобиля.
А ошибки могут быть разными: P0340 (нет сигнала определителя положения распредвала), P0341 (фазы газораспределения не совпадают с тактами ЦПГ)”, P0342 (низкий уровень сигнала в цепи ДПРВ), P0343 (высокий уровень сигнала от ДПРВ), P0339 (неверный сигнал от ДПРВ). Наиболее частая ошибка – просто отсутствие сигнала, P0340. Но эта рубрика не для тех, кто умеет пользоваться сканером – они и так всё знают. Поэтому мы пойдём своим путём – путём молотка, анализа и дешёвого мультиметра. Всё, как мы любим.
Итак, если нет сканера, самый простой способ проверки ДПРВ – это установка заведомо исправного датчика. Найти его на моторе обычно несложно (он стоит где-то с краю рядом с концом распредвала), снять – тоже. Но вот беда: мало у кого дома в кладовке лежит запасной ДПРВ. Поэтому думаем дальше.
Другой способ чуть сложнее, но тоже вполне рабочий – с замером напряжения на сигнальном проводе. Для этого лучше будет заточить щупы мультиметра до состояния игл, чтобы проткнуть ими изоляцию проводов. Сначала находим постоянные 12 вольт, которые идут после включения зажигания, потом ищем сигнальный провод. Для этого смотрим, где напряжение ниже. Если, например, на датчик идут два провода с напряжением 13,4 В, то на сигнальном будет приблизительно 12 (13,4х0,9). Если этого напряжения нет, можно поздравить себя с победой – датчик не работает, дело сделано. Если напряжение есть, ищем дальше.
Для этого лучше будет заточить щупы мультиметра до состояния игл, чтобы проткнуть ими изоляцию проводов. Сначала находим постоянные 12 вольт, которые идут после включения зажигания, потом ищем сигнальный провод. Для этого смотрим, где напряжение ниже. Если, например, на датчик идут два провода с напряжением 13,4 В, то на сигнальном будет приблизительно 12 (13,4х0,9). Если этого напряжения нет, можно поздравить себя с победой – датчик не работает, дело сделано. Если напряжение есть, ищем дальше.
Теперь надо проверить, реагирует ли датчик на репер (то есть на кусок железа). Снимаем датчик, но разъём не отключаем, потому что без постоянного питания он работать не будет. Теперь при включенном зажигании пытаемся возбудить этот датчик любым куском железа (гаечным ключом, молотком – любым железным предметом). Если во время того, как вы подносите железку к торцу датчика, напряжение на сигнальном проводе проседает до 0,5 В и меньше, датчик точно рабочий. Если нет, то он не работает. Скорее всего не работает, потому что точнее его нужно проверять осциллографом, которого, конечно же, под рукой нет. Впрочем, отсутствие падения напряжения при приближении железа говорит о неисправности ДПРВ достаточно точно, а кроме того, есть и другие способы проверки датчика с помощью мультиметра. Тут описан самый элементарный.
Впрочем, отсутствие падения напряжения при приближении железа говорит о неисправности ДПРВ достаточно точно, а кроме того, есть и другие способы проверки датчика с помощью мультиметра. Тут описан самый элементарный.
Что делать и кто виноват?
Способов существенно продлить жизнь датчику распредвала не существует. Он, как любая деталь из железа и пластика, имеет право на естественную смерть. Так что остаются только несущественные способы: стараться содержать моторный отсек в чистоте (грязь не жалеет проводку и разъёмы), а всё, что есть под капотом кроме датчика, – в порядке. Лишние вибрации, перегревы – всё это вредит любому датчику. Кстати, именно поэтому проверку ДПРВ лучше начинать с внешнего осмотра. Если у него лопнул пластиковый корпус или проводка к нему позеленела и рассыпается в руках, есть повод переживать.
Ремонтировать датчик бесполезно, его придётся только менять. И не надо себя успокаивать тем, что мотор как-то работает и без него: мотор в этом случае работает в нештатном режиме, а это не приносит ему пользы.
Напоследок – пара потенциальных причин, по которым даже исправный датчик работать не будет. Первая – это если на его торце на многолетние потёки масла попала какая-нибудь металлическая пыль или стружка. В этом случае сигнал от репера на распредвале будет искажаться или его не будет совсем. Вторая причина – это сам реперный (или задающий) диск. Если он каким-то образом люфтит на распредвале, зазор между ним и датчиком будет гулять. Сигнал в этом случае тоже будет пропадать.
практика
Новые статьи
Популярные тест-драйвы
Тест-драйвы / Тест-драйв
Haval Dargo против Mitsubishi Outlander: собака лает, чужестранец идет
В дилерском центре Haval на юге Москвы жизнь кипит: покупатели разглядывают машины, общаются с менеджерами и подписывают какие-то бумаги. Пока я ждал выдачи тестового Dargo, такой же кроссов…
14744
7
201
13.
Тест-драйвы / Тест-драйв Мотор от Mercedes, эмблема от Renault, сборка от Dacia: тест-драйв европейского Logan 1,0 Казалось бы, что нового можно рассказать про Renault Logan второго поколения, известный каждому российскому таксисту, что называется, вдоль и поперёк? Однако конкретно в этом автомобиле есть… 12546 10 41 13.08.2022
Тест-драйвы / Тест-драйв
Geely Coolray против Haval Jolion: бесплатный сыр? Если бы!
Хотите купить сегодня машину с полноценной гарантией, в кредит по адекватной ставке, без диких дилерских накруток? Сейчас это та еще задачка, ведь полноценную цепочку «представительство – з…
9564
25
30
10.
Датчики положения | MPA | SICK
Датчики положения | MPA | SICK- Главная
- Портфолио продуктов
- Магнитные датчики для пневмоцилиндров
- Датчики положения
- MPA
- Главная
- Портфолио продуктов
- Магнитные датчики для пневмоцилиндров
- Датчики положения
- MPA
обзор семейств продукции Русский Cesky Dansk Deutsch English Español Suomi Français Italiano 日本語 – Японский 한국어 – Корейский Nederlands Polski Portugues Svenska Türkçe Traditional Chinese Китайский
Датчики положения для больших пневматических цилиндров и приводов
Преимущества
- Простота установки по причине отсутствия необходимости в датчиках положения или дополнительной механике для стыковки с поршневым штоком
- Интеграция в установку возможна в любое время, поскольку датчик устанавливается снаружи на цилиндре
- Простая адаптация настроек датчика и параметров во время работы через поле обучения или IO-Link
- Большая гибкость по сравнению с традиционными датчиками для цилиндров, поскольку возможна установка нескольких точек переключения в самых стесненных условиях
- Высокая надёжность благодаря прочному алюминиевому корпусу и бесконтактному принципу измерения
- Расширенные возможности диагностики благодаря передаче данных через IO-Link
Обзор
Датчики положения для больших пневматических цилиндров и приводов
Позиционные датчики MPA постоянно, напрямую и бесконтактно регистрируют положение поршня в пневматических приводах. Датчики семейства продуктов MPA особенно подходит для больших диаметров поршня и длинных ходов. Настройки датчика могут адаптироваться при установке и впоследствии во время работы через поле обучения, а также — в зависимости от варианта — через IO-Link. Датчики постоянно передают данные через аналоговые выходы или IO-Link, обеспечивая гибкость концепций оборудования и решая такие задачи, как контроль качества и управление процессом в сочетании с пневматическими цилиндрами и приводами. Такое непрерывное определение положения расширяет функциональные возможности пневматических цилиндров, делая их умнее и вместе с тем — универсальнее.
Датчики семейства продуктов MPA особенно подходит для больших диаметров поршня и длинных ходов. Настройки датчика могут адаптироваться при установке и впоследствии во время работы через поле обучения, а также — в зависимости от варианта — через IO-Link. Датчики постоянно передают данные через аналоговые выходы или IO-Link, обеспечивая гибкость концепций оборудования и решая такие задачи, как контроль качества и управление процессом в сочетании с пневматическими цилиндрами и приводами. Такое непрерывное определение положения расширяет функциональные возможности пневматических цилиндров, делая их умнее и вместе с тем — универсальнее.
Краткий обзор
- Датчик положения для использования на пневматических цилиндрах
- Варианты датчиков с диапазонами измерения от 107 до 1007 мм
- Аналоговые выходы (для тока и напряжения), переключающий выход и IO-Link
- Монтаж с применением адаптеров на большом количестве конструкций цилиндров (цилиндр со стяжными стержнями, круглый цилиндр, профильный цилиндр)
 
Smart Fluid Power
Smart Fluid Power
Сенсорные решения для гидравлики и пневматики
Датчики fluid power от SICK обеспечивают интеллектуальные, гибкие и надёжные измерения в многочисленных вариантах применения в пневматике и гидравлике.
Узнайте больше
Применение
Технические данные
Обзор технических данных
Обзор технических данных
Функция выхода Аналоговый / Аналоговый / IO-Link IO-Link – / ✔ Настройка – / ✔ Цилиндрические корпусы с адаптером Круглый цилиндр
Цилиндр с затянутым на поршень штоком
Цилиндр с Т-пазом
Цилиндры Festo DSBC
SMC цилиндр CP96
Диапазон измерения 107 mm … 1.007 mm Длина корпуса 109 mm … 1.009 mm Напряжение питания 15 V DC … 30 V DC
Подробные технические характеристики вы можете найти на странице соответствующего устройства
Загрузки
Пожалуйста, подождите…
Ваш запрос обрабатывается, это может занять несколько секунд.
Загрузка …
Все о датчиках положения (типы, применение и характеристики)
Датчики положения дроссельной заслонки обеспечивают обратную связь с системой впрыска топлива автомобиля.
Изображение предоставлено: ЛЕВЧЕНКО ХАННА/Shutterstock.com
Датчики положения — это устройства, которые могут обнаруживать движение объекта или определять его относительное положение, измеренное от установленной контрольной точки. Эти типы датчиков также могут использоваться для обнаружения присутствия объекта или его отсутствия.
Существует несколько типов датчиков, которые служат тем же целям, что и датчики положения, и заслуживают упоминания. Датчики движения обнаруживают движение объекта и могут использоваться для запуска действия (например, включения прожектора или активации камеры безопасности). Датчики приближения также могут обнаруживать, что объект находится в пределах досягаемости датчика. Таким образом, оба датчика можно рассматривать как специальную форму датчиков положения.
В этой статье представлена информация о различных типах датчиков положения, принципах их работы, использовании и основных характеристиках, связанных с датчиками этого класса. Чтобы узнать больше о других типах датчиков, ознакомьтесь с нашими соответствующими руководствами, в которых рассматриваются различные типы датчиков и их использование, а также различные типы датчиков Интернета вещей (IoT). Для целей данной статьи термины «датчик положения» и «детектор положения» считаются синонимами.
Типы датчиков положения
Общее назначение датчика положения состоит в том, чтобы обнаруживать объект и передавать его положение посредством генерации сигнала, обеспечивающего обратную связь по положению. Эта обратная связь затем может использоваться для управления автоматическими реакциями в процессе, звуковыми сигналами тревоги или инициированием других действий в соответствии с конкретным приложением. Вообще говоря, датчики положения можно разделить на три широких класса, которые включают датчики линейного положения, датчики поворотного положения и датчики углового положения. Существует несколько конкретных технологий, которые можно использовать для достижения этого результата, и различные типы датчиков положения отражают эти базовые технологии.
Эта обратная связь затем может использоваться для управления автоматическими реакциями в процессе, звуковыми сигналами тревоги или инициированием других действий в соответствии с конкретным приложением. Вообще говоря, датчики положения можно разделить на три широких класса, которые включают датчики линейного положения, датчики поворотного положения и датчики углового положения. Существует несколько конкретных технологий, которые можно использовать для достижения этого результата, и различные типы датчиков положения отражают эти базовые технологии.
К основным типам датчиков положения относятся следующие:
- Потенциометрические датчики положения (на основе сопротивления)
- Индуктивные датчики положения
- Вихретоковые датчики положения
- Емкостные датчики положения
- Магнитные датчики положения на основе эффекта Холла
- Волоконно-оптические датчики положения
- Оптические датчики положения
- Ультразвуковые датчики положения
Потенциометрические датчики положения
Потенциометрические датчики положения представляют собой датчики на основе сопротивления, в которых используется резистивная дорожка с очистителем, прикрепленным к объекту, положение которого отслеживается. Движение объекта приводит к тому, что стеклоочиститель меняет свое положение на дорожке сопротивления и, следовательно, изменяет измеренное значение сопротивления между положением щетки и концом дорожки. Таким образом, измеренное сопротивление можно использовать в качестве индикатора положения объекта. Это достигается с помощью делителя напряжения, в котором фиксированное напряжение подается на концы дорожки сопротивления, а измеренное напряжение от положения движка до одного конца дорожки дает значение, пропорциональное положению ползуна. Этот подход работает как для линейных перемещений, так и для вращательных перемещений.
Движение объекта приводит к тому, что стеклоочиститель меняет свое положение на дорожке сопротивления и, следовательно, изменяет измеренное значение сопротивления между положением щетки и концом дорожки. Таким образом, измеренное сопротивление можно использовать в качестве индикатора положения объекта. Это достигается с помощью делителя напряжения, в котором фиксированное напряжение подается на концы дорожки сопротивления, а измеренное напряжение от положения движка до одного конца дорожки дает значение, пропорциональное положению ползуна. Этот подход работает как для линейных перемещений, так и для вращательных перемещений.
, используемые для потенциометрических датчиков положения, включают проволочную обмотку, металлокерамику или пластиковую (полимерную) пленку. Эти типы датчиков положения предлагают относительно низкую стоимость, но также имеют низкую точность и воспроизводимость. Кроме того, ограничение размера устройства по конструкции ограничивает диапазон, в котором может быть измерено изменение положения.
Индуктивные датчики положения
Индуктивные датчики положения определяют положение объекта по изменению характеристик магнитного поля, индуцируемого в катушках датчика. Один тип называется LVDT или дифференциальным трансформатором с линейной переменной. В датчике положения LVDT три отдельные катушки намотаны на полую трубку. Одна из них является первичной катушкой, а две другие — вторичной. Они электрически соединены последовательно, но соотношение фаз вторичных катушек равно 180 o не совпадают по фазе относительно первичной обмотки. Внутри полой трубы помещается ферромагнитный сердечник или якорь, который соединяется с объектом, положение которого измеряется. Сигнал напряжения возбуждения подается на первичную катушку, которая индуцирует ЭДС во вторичных катушках LVDT. Измеряя разность напряжений между двумя вторичными катушками, можно определить относительное положение якоря (и, следовательно, объекта, к которому он прикреплен). Когда якорь находится точно по центру трубки, ЭДС компенсируются, что приводит к отсутствию выходного напряжения. Но когда якорь уходит из нулевого положения, напряжение и его полярность меняются. Следовательно, амплитуда напряжения вместе с его фазовым углом служит для предоставления информации, отражающей не только величину смещения от центрального (нулевого) положения, но и его направление. На Рисунке 1 ниже показана работа дифференциального трансформатора с линейным регулированием, показывающая преобразование измерения напряжения в индикацию положения.
Рис. 1. Работа индуктивного датчика положения LVDT
Изображение предоставлено: https://www.electronics-tutorials.ws
Эти типы датчиков положения обеспечивают хорошую точность, разрешение, высокую чувствительность и хорошую линейность во всем диапазоне измерения. Они также не имеют трения и могут быть герметизированы для использования в условиях, где может быть воздействие элементов.
В то время как LVDT служат для отслеживания линейного движения, эквивалентное устройство, называемое RVDT (вращающийся дифференциальный трансформатор напряжения), может обеспечивать отслеживание положения вращения объекта. RVDT функционирует идентично LVDT и отличается только особенностями их конструкции.
RVDT функционирует идентично LVDT и отличается только особенностями их конструкции.
Вихретоковые датчики положения
Вихревые токи — это наведенные токи, возникающие в проводящем материале в присутствии изменяющегося магнитного поля и являющиеся результатом действия закона индукции Фарадея. Эти токи протекают по замкнутым петлям и, в свою очередь, приводят к генерации вторичного магнитного поля.
Если на катушку подается переменный ток для создания первичного магнитного поля, присутствие проводящего материала, поднесенного к катушке, может ощущаться благодаря взаимодействию вторичного поля, генерируемого вихревыми токами, которое влияет на полное сопротивление катушка. Таким образом, изменение импеданса катушки можно использовать для определения расстояния объекта от катушки.
Вихретоковые датчики положения работают с электропроводящими объектами. Большинство вихретоковых датчиков работают как датчики приближения, предназначенные для определения того, что объект приблизился к местоположению датчика. Они ограничены как датчики положения, потому что они всенаправленные, что означает, что они могут установить относительное расстояние объекта от датчика, но не направление объекта относительно датчика.
Они ограничены как датчики положения, потому что они всенаправленные, что означает, что они могут установить относительное расстояние объекта от датчика, но не направление объекта относительно датчика.
Емкостные датчики положения
Емкостные датчики положения полагаются на обнаружение изменения значения емкости для определения положения измеряемого объекта. Конденсаторы состоят из двух пластин, отделенных друг от друга диэлектрическим материалом между пластинами. Есть два общих метода, которые используются для определения положения объекта с помощью емкостного датчика положения:
- Путем изменения диэлектрической проницаемости конденсатора
- Путем изменения площади перекрытия пластин конденсатора
В первом случае измеряемый объект крепится к диэлектрическому материалу, положение которого относительно обкладок конденсатора изменяется при движении объекта. По мере смещения диэлектрического материала эффективная диэлектрическая проницаемость конденсатора изменяется как результат частичной площади диэлектрического материала, а баланс представляет собой диэлектрическую проницаемость воздуха. Этот подход обеспечивает линейное изменение значения емкости относительно относительного положения объекта.
Этот подход обеспечивает линейное изменение значения емкости относительно относительного положения объекта.
Во втором случае объект не прикрепляется к диэлектрическому материалу, а присоединяется к одной из обкладок конденсатора. Следовательно, по мере того, как объект перемещает свое положение, площадь перекрытия пластин конденсатора изменяется, что опять-таки меняет значение емкости.
Принцип изменения емкости для измерения положения объекта может быть применен к движению как в линейном, так и в угловом направлениях.
Магнитострикционные датчики положения
Ферромагнитные материалы, такие как железо, никель и кобальт, обладают свойством, известным как магниторестрикция, что означает, что материал изменит свой размер или форму в присутствии приложенного магнитного поля. Магниторестрикционный датчик положения использует этот принцип для определения положения объекта.
К измеряемому объекту прикреплен подвижный позиционный магнит. Волновод, состоящий из провода, по которому передается импульс тока, соединен с датчиком, расположенным на конце волновода. Позиционный магнит создает аксиальное магнитное поле, силовые линии которого компланарны по отношению к магниторестрикционному проводу и волноводу. При пропускании импульса тока по волноводу в проводе создается магнитное поле, взаимодействующее с аксиальным магнитным полем постоянного магнита (позиционного магнита). Результатом взаимодействия полей является закручивание, известное как эффект Видемана. Это скручивание вызывает натяжение провода, которое генерирует звуковой импульс, который распространяется по волноводу и обнаруживается датчиком на конце волновода. Измеряя время, прошедшее между началом импульса тока и обнаружением звукового импульса, магниторестрикционный датчик положения может установить относительное местоположение позиционного магнита.
Позиционный магнит создает аксиальное магнитное поле, силовые линии которого компланарны по отношению к магниторестрикционному проводу и волноводу. При пропускании импульса тока по волноводу в проводе создается магнитное поле, взаимодействующее с аксиальным магнитным полем постоянного магнита (позиционного магнита). Результатом взаимодействия полей является закручивание, известное как эффект Видемана. Это скручивание вызывает натяжение провода, которое генерирует звуковой импульс, который распространяется по волноводу и обнаруживается датчиком на конце волновода. Измеряя время, прошедшее между началом импульса тока и обнаружением звукового импульса, магниторестрикционный датчик положения может установить относительное местоположение позиционного магнита.
Поскольку звуковая волна будет распространяться от места, где расположен позиционный магнит, в двух направлениях (как к датчику, так и от него), на противоположном конце волновода расположено демпфирующее устройство для поглощения импульса, идущего от датчика положения. датчик, чтобы он не вызывал отражения мешающего сигнала обратно к датчику. На Рисунке 2 ниже показан принцип работы магниторестрикционного датчика положения.
датчик, чтобы он не вызывал отражения мешающего сигнала обратно к датчику. На Рисунке 2 ниже показан принцип работы магниторестрикционного датчика положения.
Рис. 2. Работа магниторезистивного датчика положения.
Изображение предоставлено: https://www.sensorland.com/HowPage024.html
По своей природе магниторестрикционные датчики положения используются для определения линейного положения. Они могут быть оснащены несколькими позиционными магнитами для предоставления информации о положении нескольких компонентов вдоль одной и той же оси. Это бесконтактные датчики, и, поскольку волновод обычно размещается в трубке из нержавеющей стали или алюминия, эти датчики можно использовать в приложениях, где они могут быть потенциально загрязнены. Кроме того, магниторестрикционные датчики положения могут работать даже при наличии преграды между волноводом и позиционным магнитом при условии, что преграда изготовлена из немагнитного материала.
Доступны датчики с различными выходами, включая напряжение постоянного тока, ток, сигнал ШИМ и цифровые импульсы пуск-стоп.
Магнитные датчики положения на основе эффекта Холла
Эффект Холла заключается в том, что когда по тонкому плоскому электрическому проводнику протекает ток и он помещается в магнитное поле, магнитное поле воздействует на носители заряда, заставляя их накапливаться на одной стороне проводника по отношению к другой, чтобы компенсировать интерференцию магнитного поля. Это неравномерное распределение электрических зарядов приводит к созданию разности потенциалов между двумя сторонами проводника, известной как напряжение Холла. Этот электрический потенциал возникает в направлении, поперечном направлению течения электрического тока и направлению магнитного поля. Если ток в проводнике поддерживается на постоянном уровне, величина напряжения Холла будет напрямую отражать силу магнитного поля.
В датчике положения на эффекте Холла объект, положение которого измеряется, соединяется с магнитом, расположенным в валу датчика. При движении объекта положение магнита меняется относительно элемента Холла в датчике. Затем это перемещение положения изменяет силу магнитного поля, приложенного к элементу Холла, что, в свою очередь, отражается как изменение измеренного напряжения Холла. Таким образом, измеренное напряжение Холла становится индикатором положения объекта.
Затем это перемещение положения изменяет силу магнитного поля, приложенного к элементу Холла, что, в свою очередь, отражается как изменение измеренного напряжения Холла. Таким образом, измеренное напряжение Холла становится индикатором положения объекта.
Волоконно-оптические датчики положения
Волоконно-оптические датчики положения используют оптическое волокно с набором фотодетекторов, расположенных на каждом конце волокна. Источник света прикреплен к объекту, за движением которого наблюдают. Энергия света, направленная во флуоресцентное волокно в месте нахождения объекта, отражается в волокне и направляется на любой конец волокна, где она обнаруживается фотодетекторами. Логарифм отношения измеренной оптической мощности, наблюдаемой на двух фотодетекторах, будет линейной функцией расстояния объекта от конца волокна, и поэтому это значение можно использовать для предоставления информации о местоположении объекта.
Оптические датчики положения
Оптические датчики положения работают по одному из двух принципов. В первом типе свет передается от излучателя и направляется к приемнику на другом конце датчика. Во втором типе излучаемый световой сигнал отражается от контролируемого объекта и возвращается к источнику света. Изменение характеристик света (например, длины волны, интенсивности, фазы, поляризации) используется для получения информации о положении объекта. Эти типы датчиков делятся на три категории:
В первом типе свет передается от излучателя и направляется к приемнику на другом конце датчика. Во втором типе излучаемый световой сигнал отражается от контролируемого объекта и возвращается к источнику света. Изменение характеристик света (например, длины волны, интенсивности, фазы, поляризации) используется для получения информации о положении объекта. Эти типы датчиков делятся на три категории:
- Передающие оптические энкодеры
- Оптические энкодеры на отражение
- Интерференционные оптические энкодеры
Оптические датчики положения на основе энкодера доступны как для линейного, так и для вращательного движения.
Ультразвуковые датчики положения
Подобно оптическим датчикам положения, ультразвуковые датчики положения излучают высокочастотную звуковую волну, обычно генерируемую пьезоэлектрическим кристаллическим преобразователем. Ультразвуковые волны, генерируемые преобразователем, отражаются от измеряемого объекта или цели обратно к преобразователю, где генерируется выходной сигнал. Ультразвуковые датчики могут работать как датчики приближения, когда они сообщают об объекте, находящемся в пределах заданного диапазона датчика, или как датчик положения, который предоставляет информацию о расстоянии. Преимущества ультразвуковых датчиков положения заключаются в том, что они могут работать с целевыми объектами из различных материалов и характеристик поверхности, а также могут обнаруживать небольшие объекты на большем расстоянии, чем датчики положения других типов. Они также устойчивы к вибрации, окружающему шуму, электромагнитным помехам и инфракрасному излучению.
Ультразвуковые датчики могут работать как датчики приближения, когда они сообщают об объекте, находящемся в пределах заданного диапазона датчика, или как датчик положения, который предоставляет информацию о расстоянии. Преимущества ультразвуковых датчиков положения заключаются в том, что они могут работать с целевыми объектами из различных материалов и характеристик поверхности, а также могут обнаруживать небольшие объекты на большем расстоянии, чем датчики положения других типов. Они также устойчивы к вибрации, окружающему шуму, электромагнитным помехам и инфракрасному излучению.
Конкретные параметры, определяющие характеристики датчика положения, будут различаться в зависимости от выбранного типа датчика, поскольку основные технологические принципы меняются от типа к типу. Вот некоторые ключевые характеристики, которые следует учитывать применительно к большинству датчиков положения:
- Диапазон измерения — указывает диапазон расстояний от датчика, для которого может быть получено измеренное значение.

- Разрешение — определяет значение наименьшего приращения положения, которое может измерить датчик.
- Точность – мера степени, в которой измеренное положение согласуется с фактическим положением измеряемого объекта.
- Повторяемость — отражает диапазон значений, полученных для измеренного положения, когда датчик выполняет идентичное измерение во времени.
- Линейность – степень отклонения от линейного поведения выходного сигнала, измеренного в диапазоне вывода датчика.

Другие факторы выбора датчиков положения включают:
- Размер и вес датчика
- Предоставляет ли датчик абсолютную или инкрементную информацию о положении
- Диапазон рабочих температур для устройства
- Способность датчика выдерживать другие условия окружающей среды и эксплуатации, такие как наличие конденсата, загрязнения или механические удары и вибрация
- Простота установки
- Начальная стоимость
Примеры применения датчика положения
Датчики положения имеют множество применений и лежат в основе многих автоматизированных процессов. Знакомым является автоматизированная мойка автомобилей. Датчики положения используются для определения местоположения автомобиля, когда он движется по автомойке. Это позволяет активировать уборочное оборудование в нужное время. Чтобы автомойка могла очистить шины, она должна знать, где они находятся и когда они находятся в правильном положении, чтобы применить очистители или средства защиты шин. Учитывая тот факт, что автомобили бывают разных размеров, необходимы датчики положения, чтобы определить, когда начинать и останавливать процесс очистки, чтобы автомойка могла адаптироваться к различным автомобилям и по-прежнему эффективно очищать их все.
Знакомым является автоматизированная мойка автомобилей. Датчики положения используются для определения местоположения автомобиля, когда он движется по автомойке. Это позволяет активировать уборочное оборудование в нужное время. Чтобы автомойка могла очистить шины, она должна знать, где они находятся и когда они находятся в правильном положении, чтобы применить очистители или средства защиты шин. Учитывая тот факт, что автомобили бывают разных размеров, необходимы датчики положения, чтобы определить, когда начинать и останавливать процесс очистки, чтобы автомойка могла адаптироваться к различным автомобилям и по-прежнему эффективно очищать их все.
также используются для управления оборудованием. Индуктивные датчики, представляющие собой большие петли из проволоки, встроенные в дороги, используются для обнаружения транспортных средств на полосе левого поворота, чтобы позволить системе управления дорожным движением активировать светофор. На парковках с системами контроля доступа датчики положения поднимают ворота, когда к ним приближаются автомобили. Лифты используют датчики положения, чтобы определить, правильно ли расположен лифт на определенном этаже и что двери лифта можно безопасно открывать.
Лифты используют датчики положения, чтобы определить, правильно ли расположен лифт на определенном этаже и что двери лифта можно безопасно открывать.
Промышленные процессы в автоматизированных производственных линиях используют датчики положения, чтобы убедиться, что продукты находятся в правильном положении, прежде чем произойдет автоматический этап процесса, такой как распыление краски на кузов автомобиля или добавление воды в бутылку с водой. В медицинских учреждениях есть МРТ-сканеры, в которых используются датчики положения, чтобы убедиться в правильности положения пациента перед началом сканирования или визуализации, а также для перемещения пациента через МРТ-аппарат.
Автомобильные конструкторы и инженеры используют датчики положения для измерения важных параметров двигателя, таких как положение коленчатого вала и положение дроссельной заслонки.
Камеры видеонаблюдения с возможностью сканирования и наклона будут использовать датчики положения для определения относительного направления камеры, чтобы убедиться, что она правильно ориентирована для оптимального обзора.
Резюме
В этой статье представлен краткий обзор датчиков положения, включая описание, типы, основные характеристики и способы их использования. Для получения информации по другим темам обратитесь к нашим дополнительным руководствам или посетите платформу поиска поставщиков Thomas, где вы можете найти потенциальные источники поставок для более чем 70 000 различных категорий продуктов и услуг.
Источники:
- https://www.electronics-tutorials.ws
- https://www.azosensors.com/article.aspx?ArticleID=308
- https://www.engineersgarage.com
- https://www.positek.com/
- https://www.te.com/usa-en/products/sensors/position-sensors.html
- https://www.sensorland.com/HowPage024.html
- https://www.celeramotion.com/zettlex/support/technical-papers/position-sensors-choosing-the-right-sensor/
- https://www.linearmotiontips.com/how-do-magnetostrictive-sensors-work/
- http://hyperphysics. phy-astr.gsu.edu/hbase/magnet/Hall.html
- https://www.migatron.com/understanding-ultrasonic-technology/
 phy-astr.gsu.edu/hbase/magnet/Hall.html
phy-astr.gsu.edu/hbase/magnet/Hall.htmlПрочие датчики Артикул
- Лучшие поставщики и производители датчиков движения в США и за рубежом
- Емкостные датчики приближения
- Типы датчиков температуры
- Ведущие биосенсорные компании в США и за рубежом
- Датчики угла поворота вала
- Ведущие поставщики и производители датчиков приближения в США и во всем мире
- Анализаторы выхлопных газов
- Лучшие производители и поставщики датчиков температуры
- Лучшие производители и поставщики датчиков в США
- Световые датчики движения
- Лучшие поставщики и производители датчиков давления в США
- Типы датчиков давления — руководство
- Различные типы датчиков и их использование (например, электрические датчики)
- Все о детекторах радиации
- Все о датчиках движения
- Все о датчиках частиц
- Все о фотоэлектрических датчиках
Еще из раздела Инструменты и элементы управления
Датчики линейного перемещения| Датчики Althen
Точное измерение линейных перемещений и перемещений
Системы линейного измерения положения: гарантированная точность
Датчики линейного положения измеряют расстояние между объектом и точкой отсчета, а также изменения положения. Они делают это путем преобразования рабочего объема в электрическую мощность. Можно использовать самые разные принципы измерения, чтобы выполнять точные и надежные измерения для широкого круга приложений. Датчики линейного перемещения и измерительные системы используются как в промышленности, так и в научных лабораториях.
Они делают это путем преобразования рабочего объема в электрическую мощность. Можно использовать самые разные принципы измерения, чтобы выполнять точные и надежные измерения для широкого круга приложений. Датчики линейного перемещения и измерительные системы используются как в промышленности, так и в научных лабораториях.
Мы будем рады помочь вам выбрать наиболее подходящий датчик или измерительное решение. Заполните нашу контактную форму или свяжитесь с нами напрямую: вы можете найти номера телефонов и адреса электронной почты вашего ближайшего офиса на странице наших местоположений .
Ассортимент продукции Датчики линейного перемещения
Найдите идеальный датчик линейного перемещения для своей области применения. Будем рады помочь вам выбрать.
Технология линейного измерения положения Althen
Мы предлагаем технологию линейного измерения положения для широкого спектра приложений, требующих измерения перемещения, расстояния или положения. Наши линейные датчики положения включают в себя обычные индуктивные датчики и датчики перемещения, а также специализированные датчики, подходящие для OEM-приложений. Наше портфолио завершают новейшие бесконтактные вихретоковые датчики.
Наши линейные датчики положения включают в себя обычные индуктивные датчики и датчики перемещения, а также специализированные датчики, подходящие для OEM-приложений. Наше портфолио завершают новейшие бесконтактные вихретоковые датчики.
Датчики линейного перемещения Althen основаны на различных физических принципах. Это позволяет нам предоставить идеальный датчик для вашего приложения. Наши линейные датчики положения можно разделить на контактные и бесконтактные датчики положения. Мы также поставляем искробезопасные датчики положения EX для опасных зон Ex II 1G, Ex II 1GD и Ex i/II M1/1GD. Эти датчики положения доступны в различных конфигурациях.
Контактные линейные датчики положения:
- Линейные регулируемые дифференциальные трансформаторы (LVDT-датчики)
В пределах указанного диапазона измерения LVDT-датчики обеспечивают превосходную линейность. Они способны обнаруживать очень небольшие изменения положения и имеют практически неограниченное разрешение. В результате датчики LVDT также подходят для измерения высоких ускорений и длительных циклов измерения. - Линейные индуктивные датчики положения
Линейные индуктивные датчики положения прочны, долговечны и особенно устойчивы к колебаниям температуры. Это означает, что они идеально подходят для измерения линейного перемещения практически в любых промышленных условиях, особенно в гидравлических или пневматических устройствах. - Тросовые датчики
Тросовые датчики (также называемые датчиками перемещения струнного потенциометра) могут измерять расстояния с точностью до 0,01 мм. Они измеряют положение и движение объекта с помощью гибкого стального троса, который подается с подпружиненной катушки. Таким образом, линейное движение на конце троса преобразуется во вращательное движение.
 В результате датчики LVDT также подходят для измерения высоких ускорений и длительных циклов измерения.
В результате датчики LVDT также подходят для измерения высоких ускорений и длительных циклов измерения.- Линейные потенциометры
Линейные потенциометры (потенциометрические датчики и датчики перемещения) основаны на электрическом сопротивлении. Их сопротивление можно изменять механически (вращением или перемещением). Эти датчики в основном используются в качестве плавно регулируемых делителей напряжения. Линейные потенциометры Althen очень компактны и легки и выпускаются в различных конфигурациях. - Датчики Холла
Датчики на эффекте Холла используются для измерения силы магнитных полей. Их основное применение — испытания на долговечность и нагрузку, а также измерение магнитных полей или толщины слоев. Наши датчики Холла также доступны в нескольких модифицированных версиях для особых требований.
 Эти датчики в основном используются в качестве плавно регулируемых делителей напряжения. Линейные потенциометры Althen очень компактны и легки и выпускаются в различных конфигурациях.
Эти датчики в основном используются в качестве плавно регулируемых делителей напряжения. Линейные потенциометры Althen очень компактны и легки и выпускаются в различных конфигурациях.Бесконтактные линейные датчики положения:
- Вихретоковые датчики
Вихретоковые датчики представляют собой бесконтактные датчики положения, доступные для диапазонов измерения от 0,5 до 60 мм. На эти датчики не влияют такие среды, как масло, вода или пыль в измерительном зазоре. - Лазерные триангуляционные датчики
С помощью наших бесконтактных лазерных триангуляционных датчиков можно измерять даже критические поверхности, такие как горячие металлы. Они используют лазерную точку для определения перемещения, расстояния или положения объекта (лазерные датчики расстояния). Магнитострикционные линейные датчики положения
Эти прочные датчики измеряют расстояние между двумя точками. Они состоят из неподвижного основания, волновода, подвижного постоянного магнита и преобразователя, преобразующего механическую вибрацию в электрический сигнал. Эти датчики подходят для широкого спектра применений, даже в экстремальных условиях. Они в значительной степени устойчивы к температуре, ударам, вибрации и загрязнениям.
 Они используют лазерную точку для определения перемещения, расстояния или положения объекта (лазерные датчики расстояния).
Они используют лазерную точку для определения перемещения, расстояния или положения объекта (лазерные датчики расстояния).
Датчики положения для машинного оборудования
Для машинного оборудования требуются сверхмощные датчики. Датчики должны быть надежными, долговечными и точными. Наши линейные и поворотные датчики помогут вам сократить расходы (на техническое обслуживание) и могут стать частью вашей программы автоматизации и цифровизации. Независимо от того, является ли производство мелкосерийным или массовым, производство качественных товаров требует качественного оборудования.