
Разность фаз напряжения и тока
[email protected]
Узнать больше Помощь в заказе
Условимся под разностью фаз φ напряжения и тока всегда понимать разность начальных фаз напряжения и тока (а не наоборот):
Поэтому на векторной диаграмме угол φ отсчитывается в направлении от вектора I к вектору U (рис. 3.10). Именно при таком определении разности фаз угол φ равен аргументу комплексного сопротивления. Угол φ положителен при отстающем токе () и отрицателен при опережающем токе ().
Разность фаз между напряжением и током зависит от соотношения индуктивного и емкостного сопротивлений. При имеем и ток отстает по фазе от напряжения, . При имеем , ток совпадает по фазе с напряжением, rLC-цепь в целом проявляет себя как активное сопротивление. Это случай так называемого резонанса в последовательном контуре. Наконец, при имеем , ток опережает по фазе напряжение.
Векторные диаграммы для трех возможных соотношений даны на рис. 3.11. При построении этих диаграмм начальная фаза тока ; принята равной нулю. Поэтому равны друг другу.
Поэтому равны друг другу.
Рассматривая при заданной частоте цепь по рис. 3.8 в целом как пассивный двухполюсник, можно ее представить одной из трех эквивалентных схем: при как последовательное соединение сопротивления и индуктивности (), при как сопротивление r и при как последовательное соединение сопротивления и емкости (). При заданных L и С соотношение между зависит от частоты, а потому от частоты зависит и вид эквивалентной схемы.
Выше, в разделе, было принято, что задан ток, а определялись напряжения на элементах и на входных выводах цепи. Однако часто бывает задано напряжение на выводах, а ищется ток. Решение такой задачи не представляет труда. Записав по заданным величинам комплексное напряжение U и комплексное сопротивление Z, определим комплексный ток
и тем самым действующий ток и начальную фазу тока.
Часто равной нулю принимается начальная фаза заданного напряжения: . В этом случае, как следует из раздела, начальная фаза тока ; равна и противоположна по знаку разности фаз φ, т. е .
е .
Установленные выше соотношения между амплитудами и действующими токами и напряжениями, а также выражение для сдвига фаз ф позволяют вычислить ток и не прибегая к записи закона Ома в комплексной форме. Подробно этот путь решения показан в примере 3.4.
Пример 3.4.
К цепи, состоящей из последовательно соединенных конденсатора и катушки, приложено напряжение . Емкость конденсатора С=5 мкФ, сопротивление катушки r=15 Ом, индуктивность L=12 мГн. Найти мгновенные значения тока в цепи и напряжений на конденсаторе и на катушке.
Решение.
Схема замещения цепи показана на рис. 3.8.
Напряжение на емкости отстает от тока по фазе на 90°, следовательно,
Комплексное сопротивление катушки
Комплексная амплитуда напряжения на выводах катушки
Мгновенное напряжение на катушке
Пример 3.5.
В цепи, состоящей из последовательно соединенных конденсатора и катушки, ток I=2 А, его частота f=50 Гц. Напряжение на выводах цепи U=100 В, катушки Uкат =150 В и конденсатора Uс=200 В. Определить сопротивление и индуктивность катушки и емкость конденсатора.
Напряжение на выводах цепи U=100 В, катушки Uкат =150 В и конденсатора Uс=200 В. Определить сопротивление и индуктивность катушки и емкость конденсатора.
Решение.
Полное сопротивление цепи z=U/I=50 Ом.
Полное сопротивление катушки zкат=Uкат/I=75 Ом;
Все страницы раздела «Цепи переменного тока» на websor
Разность фаз тока и напряжения
В общем случае ток и напряжение достигают своих максимальных значений не одновременно. При этом говорят, что имеет место разность фаз тока и напряжения (сдвиг по фазе).
Разностью фаз тока и напряжения называется доля периода, на которую одна функция опережает другую (или отстает от нее).
При этом если ток по фазе
отстает от напряжения,
разность фаз считается положительной (φ >0), в противном случае разность фаз
считается отрицательной (φ<0). Нередко
разность фаз измеряют не в долях периода,
а в угловых градусах. При этом полный
период соответствует 3600. В примере, приведенном на рис.2.1, ток
опережает напряжение, значит, φ <0.
Нередко
разность фаз измеряют не в долях периода,
а в угловых градусах. При этом полный
период соответствует 3600. В примере, приведенном на рис.2.1, ток
опережает напряжение, значит, φ <0.
φ
= —
Приведенный пример определяет метод измерения разности фаз: измерив по шкале на экране осциллографа и Т, разность фаз можно определить по формуле:
φ = (2.10)
Производить операции над синусоидальными величинами, изменяющимися с одинаковой частотой (например, складывать или вычитать, умножать на число, большее нуля), гораздо проще, если изображать их в виде векторов.
На векторной
диаграмме синусоидальные функции
условно представляются в виде векторов, длины которых в масштабе соответствуют действующим значениям этих функций.
Направление одного из векторов (так называемого опорного вектора) выбирается произвольно. При этом порядок следования векторов (отставание, опережение) определяется при мысленном вращении диаграммы против часовой стрелки. Как уже говорилось, на векторных диаграммах токов и напряжений положительная разность фаз (φ >0) означает, что ток отстает от напряжения, и наоборот.
Пример 1. Построить векторную диаграмму: U=20 В,I=15 мА,
φ= — 45
Последовательность действий:
Выбираем масштаб тока и напряжения (независимо друг от друга). Указывать масштаб можно разными способами, например, так:
МU: 0,5; МI: 0,6 ;
или графически: 5 В 3 мА
Выбираем опорный вектор, определяем его длину в масштабе.

Чертим другой вектор в соответствующем масштабе и под углом φ к опорному вектору.
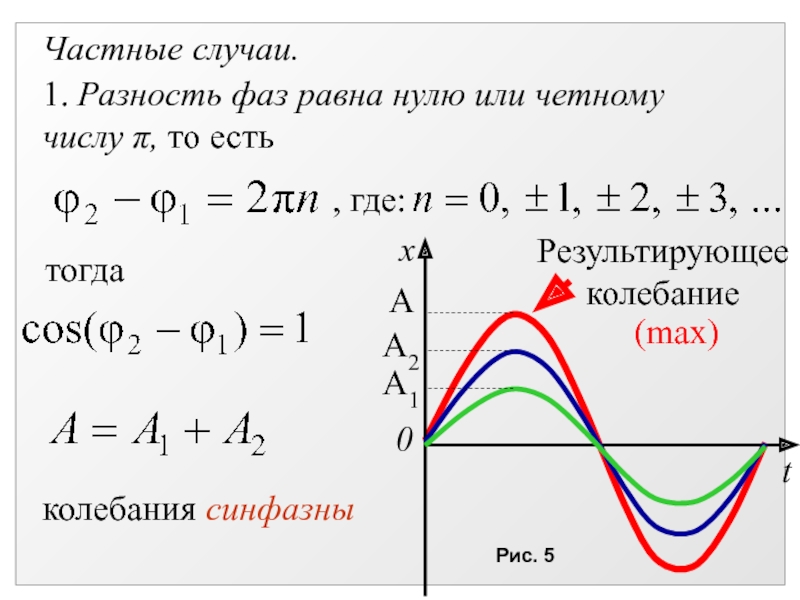
Рис. 2.2
Пример 2. По некоторому участку цепи протекают токи: I1=60 мА,
I2=40 мА, I3=90 мА
Разности фаз токов с напряжением соответственно равны: φ1 = 900,
φ2= 00,
Чемуравен результирующий ток?
Решение:
Построим векторную диаграмму, то есть сложим векторы токов:
= ++
В
качестве опорного выбираем вектор
,
одинаковый для всех токов. При сложении
векторов каждый следующий вектор
проводится из конца предыдущего.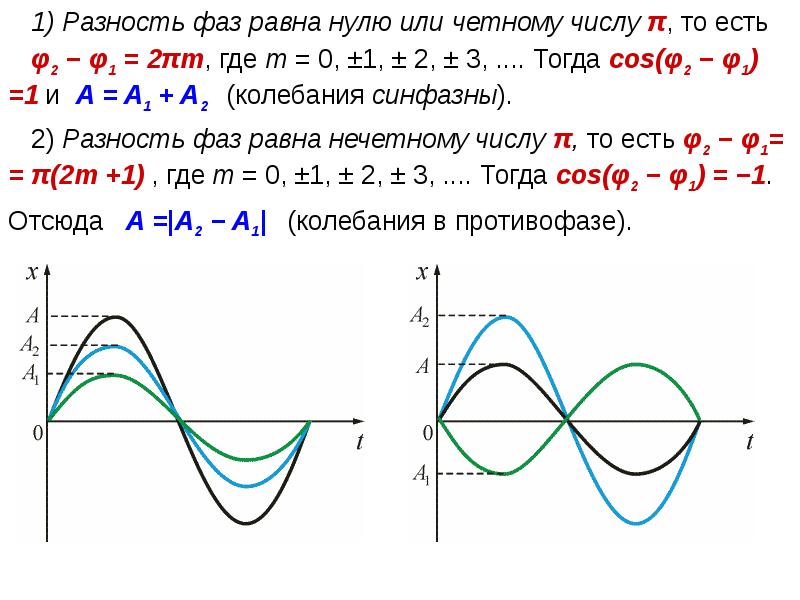 Результирующим является вектор,
проведенный из начала первого в конец
последнего вектора. (Рис.2.3)
Результирующим является вектор,
проведенный из начала первого в конец
последнего вектора. (Рис.2.3)
Масштаб: 10 мА
Рис. 2.3
Рядом с чертежом необходимо указать масштаб. Величину результирующего тока I определяют с помощью линейки и указанного масштаба. В данном случае, так как углы между векторами составляют 900, величину тока I можно найти по теореме Пифагора: I = == 50 (мА)
Результирующий ток I опережает напряжение U на угол φ< 0.
Элементы в цепи переменного тока.
В электротехнике наиболее распространены три вида элементов:
1) резистивный; 2) индуктивный; 3) емкостный.
Разность фаз и фазовый сдвиг
Положение волновой частицы периодической формы волны известно как «Фаза» волны. Полная фаза полного цикла сигнала равна 360 0 .
Полная фаза полного цикла сигнала равна 360 0 .
Когда две или более волны одной и той же частоты интерферируют в среде или движутся по одному и тому же пути, «фаза» волн играет важную роль для получения желаемого результата без каких-либо шумов.
Фазу также можно определить как «относительное смещение двух волн относительно друг друга».
Фаза также может быть выражена в радианах и градусах. Один радиан = 57,3 градуса.
Краткое описание
Разность фаз
Разность фаз синусоидальной волны можно определить как «интервал времени, на который волна опережает другую волну или отстает от нее», и разность фаз не является свойством только одной волны, это относительное свойство двух или более волн. Это также называется «фазовым углом» или «фазовым смещением».
Разность фаз, представленная греческой буквой фи (Φ). Полная фаза сигнала может быть определена как 2π радиан или 360 градусов.
Опережающая фаза означает, что волна опережает другую волну с той же частотой, а Отстающая фаза означает, что волна отстает от другой волны с той же частотой.
Фазовая квадратура: когда разность фаз между двумя волнами составляет 90 0 (это может быть = + 90 0 или – 90 0 ), говорят, что волны находятся в «фазовой квадратуре».
Противофаза: когда разность фаз между двумя волнами составляет 180 0 (может быть = + 180 0 или – 180 0 ), то говорят, что волны находятся в «фазовой оппозиции».
Чтобы лучше понять эту концепцию, обратите внимание на рисунок ниже.
Временной интервал и фаза сигнала обратно пропорциональны друг другу. Это означает, что
t град = 1 / (360 f ) (градусы)
t рад = 1 / (6,28 f ) (радиан)
Где f — частота сигнала, а t — период времени.
Например, если две синусоидальные волны имеют одинаковую частоту и фазовый сдвиг π/2 радиан, то фазы волн можно определить как (nπ + 1) и nπ радиан.
Фазовый сдвиг сигналов также может быть представлен в виде периода времени (T). Например, + 6 мс и – 7 мс и т. д.
д.
Вернуться к началу
Уравнение разности фаз
Разность фаз синусоидальных сигналов может быть выражена приведенным ниже уравнением, используя максимальное напряжение или амплитуду сигналов,
A ( t) = A max ×sin(ωt±Ø)
Где
Amax – амплитуда синусоиды измерения
ωt — угловая скорость (радиан/сек)
Φ — фазовый угол. (Радианы или градусы)
Если Φ < 0, то говорят, что фазовый угол волны находится в отрицательной фазе. Точно так же, если Φ > 0, то говорят, что фазовый угол волны находится в положительной фазе.
Соотношение фаз синусоидального сигнала
Каждый сигнал переменного тока будет иметь свой ток, напряжение и частоту. Если напряжение и угловые скорости двух сигналов одинаковы, то их фаза также одинакова в любой момент времени.
На приведенном выше рисунке мы видим три волны, которые начинаются в начале координат, опережают в начале координат и отстают в начале координат соответственно.
Вернуться к началу
Разность фаз сигналов
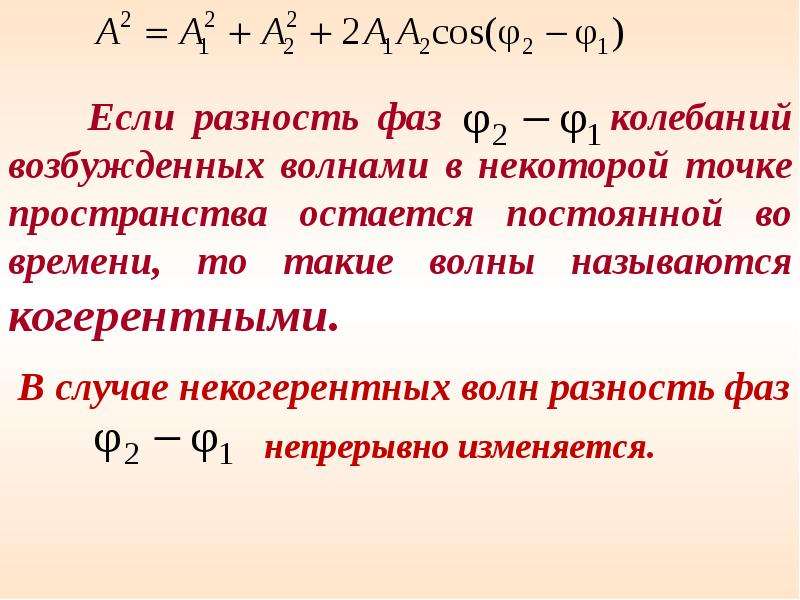
Вне фазы
Когда чередующиеся сигналы имеют одинаковую частоту, но разные фазы, говорят, что они «вне фазы». Разность фаз не равна нулю для расфазированных волн. Обратите внимание на приведенный ниже рисунок, который описывает несовпадающую по фазе концепцию двух синусоидальных волн. Для синфазных сигналов запаздывание составляет доли длины волны, такие как 1/2, 2/3, 3/5… и т. д.
На приведенном выше рисунке волна «B» опережает на 90 0 (Φ = 90 0 ) волну «A». Таким образом, мы можем сказать, что две волны не совпадают по фазе.
Для волн, не совпадающих по фазе, есть два условия. Это
1. Опережающая фаза
2. Отстающая фаза
Опережающая фаза
Когда два сигнала одной и той же частоты движутся вдоль одной и той же оси, и один сигнал опережает другой, тогда это называется опережающим фазовым сигналом. .
Уравнения тока и напряжения для опережающих фазированных сигналов:
Напряжение (Vt) = Vm sin ωt
Ток (it) = Im sin (ωt – Φ)
Где Φ — опережающий фазовый угол.
Отставание по фазе
Когда два сигнала одной частоты движутся вдоль одной и той же оси, и один сигнал отстает от другого, это называется «Отставание по фазе».
Уравнения напряжения и тока для опережающих фазированных сигналов:
Напряжение (Vt) = Vm sin ωt
Ток (it) = Im sin (ωt + Φ)
Где Φ — фазовый угол отставания.
Синфазные синусоидальные волны
Когда разница между фазами двух чередующихся волн равна нулю, волны называются синфазными. Это может произойти, когда два сигнала имеют одинаковую частоту и одинаковую фазу. Для синфазных сигналов запаздывание представляет собой целое число длин волн, например 0, 1, 2, 3… Синфазные сигналы показаны на рисунке ниже.
Сигналы на приведенном выше рисунке имеют разную амплитуду (максимальное напряжение), но имеют одинаковую частоту.
Пример: Если две синусоидальные волны A и B не совпадают по фазе, а разность фаз составляет 25 0 , то мы можем объяснить соотношение между волнами как
Волна «A» опережает волну «B» на 25 0 или волна ‘B’ отстает от волны ‘A’ на 25 0 . Таким образом, ток и напряжение этих сигналов также изменяются в зависимости от фазового сдвига нефазированных сигналов.
Таким образом, ток и напряжение этих сигналов также изменяются в зависимости от фазового сдвига нефазированных сигналов.
Вернуться к началу
Соотношение фаз напряжения и тока к R, L, C
Цепь RLC также называется «резонансной схемой». Ниже поясняется поведение напряжения и тока резистора, конденсатора и катушек индуктивности по отношению к фазе.
- Резистор: В резисторе ток и напряжение находятся в одной фазе. Таким образом, разность фаз между ними измеряется как 0, .
- Конденсатор: в конденсаторе ток и напряжение не совпадают по фазе, и ток опережает напряжение на 90 0 . Таким образом, разность фаз между током и напряжением в конденсаторе измеряется как 90 0 .
- Катушка индуктивности: в катушке индуктивности ток и напряжение не совпадают по фазе. Напряжение опережает ток на 90 0 . Таким образом, разность фаз между напряжением и током в конденсаторе измеряется как 90

ПРИМЕЧАНИЕ:
Существует простой метод, позволяющий без путаницы запомнить соотношение между напряжением и током. Этот метод C I V I L
Первые 3 буквы C I V означают, что в конденсаторе I (ток) опережает V (напряжение).
Наверх
Резюме
- Мы можем обобщить эту общую концепцию как
- Фаза: Положение движущейся частицы формы волны называется «Фазой» и измеряется в «Радианах или градусах».
- Разность фаз: Интервал времени, на который волна опережает другую волну или отстает от нее, называется «Разностью фаз» или «Угол фаз». Он определяется буквой «Ф».
- Фазовый угол измеряется в «радианах/с» или «градусах/с», а фаза полного цикла указывается как «360
- Не в фазе: когда чередующиеся сигналы имеют одинаковую частоту, но разные фазы, говорят, что они «вне фазы».
- Синфазный: когда разница между фазами двух чередующихся волн равна нулю, говорят, что они синфазны.
- Опережающая фаза: сигнал опережает другой сигнал с той же частотой.
- Отставание фазы: сигнал отстает от другого сигнала с той же частотой.
- В цепях LRC соотношение фаз между напряжением и током будет
- В резисторах: фазы напряжения и тока совпадают. Таким образом, разность фаз равна 0,
- В конденсаторах: Ток опережает напряжение на 90 градусов. Таким образом, разность фаз равна 90 0 .
- В индукторах: напряжение опережает ток на 90 градусов. Таким образом, разность фаз равна 90 0 .
Вернуться к началу
Разность фаз и разность фаз
Что нужно знать:
- Что мы подразумеваем под фазой и разностью фаз?
- На что влияет разность фаз?
- Как мы можем использовать разность хода для определения разности фаз в точке?
Посмотрите на приведенную ниже диаграмму прогрессивной волны, движущейся слева направо.
Представьте, что вы частица Б – в каком вертикальном направлении вы движетесь?
ВВЕРХ!
Теперь посмотрите на частицу на целую длину волны дальше по длине волны (частица F). В каком направлении он движется?
ВВЕРХ!
Они не только колеблются в одном направлении, но и колеблются в такт друг другу.
Таким образом, две точки на расстоянии
Что, если мы посмотрим на две точки на волне, которые находятся ровно в ПОЛОВИНЕ ДЛИНЫ ВОЛНЫ друг от друга, как изменится движение частицы?
 youtube.com/embed/X1q9D-JKcQU?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en&autohide=2&hd=1&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/>
youtube.com/embed/X1q9D-JKcQU?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en&autohide=2&hd=1&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/> Итак, две точки a
Как описать разность фаз?Разность фаз любых двух точек на волне зависит от доли длины волны между точками!
Если мы попытаемся описать разность фаз в терминах «эта большая часть длины волны», все может немного запутаться. Вместо этого мы определяем разность фаз между любыми двумя точками на волне в РАДИАНАХ.
РАДИАНЫ — это еще один способ определения угла.
Полный круг включает 360°, что составляет 2π радиан. Но как это связано с волной?
Но как это связано с волной?
Итак, если вы начертите вертикальное смещение точки на окружности при ее вращении в зависимости от времени, вы получите форму поперечной волны:
В результате один полный цикл поперечной волны равен соответствует одному полному обороту окружности.
Полная волна содержит 2π радиан!
Так какой же будет половина длины волны?
π радиан!
ПРИМЕЧАНИЕ. Мы можем записать радианы как рад, но убедитесь, что вы всегда оставляете их в единицах пи, а НЕ в десятичной дроби!
В приведенной ниже таблице показано, как разделение определенных долей длины волны (измеренное от точки A) соответствует разделению в радианах:
Мы также можем думать о разности фаз с точки зрения двух волн ОДИНАКОВОЙ ДЛИНЫ ВОЛНЫ, производимых с временной задержкой между ними:
Чтобы вычислить здесь разность фаз, нам нужно определить, каково расстояние между двумя одинаковыми точками на каждой волне в единицах длины волны. Видео ниже показывает вам пример этого.
Видео ниже показывает вам пример этого.
Phase_difference практические вопросы
Phase_difference практические вопросы с ответами
Разница пути
РАЗНИЦА ПУТИ ОПРЕДЕЛЕНИЕ: 900 05
Разность хода двух волн — это разница в пройденном ими расстоянии.
Так как же разность хода двух волн связана с разностью фаз?
Помните, выше мы говорили, что вы можете вычислить разность фаз двух волн с одинаковой длиной волны, рассчитав расстояние между ними в долях длины волны?
Мы можем использовать тот же принцип для любых двух волн одинаковой длины, достигающих точки:
Разность хода = целое число длин волн = В ФАЗЕ
 youtube.com/embed/cGqlIHA2MjE?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en&autohide=2&hd=1&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/>
youtube.com/embed/cGqlIHA2MjE?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en&autohide=2&hd=1&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/> Разность хода = 1/2 количества длин волн = ПРОТИВОФАЗНЫЙ
например. Две разные световые волны с длиной волны 10 м испускаются двумя разными лампочками и встречаются в одной точке. В этот момент первая волна прошла 7,5 м, а вторая — 5 м.
а) Какова разность хода двух волн в этой точке?
б) Какова разность фаз двух волн в этой точке?
ОТВЕТ
Связывание разности путей и разности фаз: уравнение
ПРИМЕЧАНИЕ. Сначала преобразуйте разность хода И длину волны в метры! И оставьте радианы в единицах пи!
Сначала преобразуйте разность хода И длину волны в метры! И оставьте радианы в единицах пи!
напр.
а) Чему равна разность фаз двух точек волны с длиной волны 4 м, находящихся на расстоянии 2 м друг от друга?
б) Чему равна разность фаз двух точек на волне с длиной волны 12 м, находящихся на расстоянии 3 м друг от друга?
c) Каково расстояние между двумя точками волны с длиной волны 20 см, которые находятся на расстоянии 10 см друг от друга?
ОТВЕТЫ
ПРОГРЕССИВНАЯ ВОЛНА ОПРЕДЕЛЕНИЕ:
Прогрессирующая волна распределяет энергию от точечного источника в окружающее пространство. Они перемещают энергию в виде вибрирующих частиц или полей.
Посмотрите на анимацию ниже, которая показывает один из способов формирования прогрессивной волны. Посмотрите на зеленые частицы. Они вообще меняют свое ГОРИЗОНТАЛЬНОЕ положение по волне?
 youtube.com/embed/0z4U3PWCHkA?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en&autohide=2&hd=1&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/>
youtube.com/embed/0z4U3PWCHkA?version=3&rel=1&showsearch=0&showinfo=1&iv_load_policy=1&fs=1&hl=en&autohide=2&hd=1&wmode=transparent» allowfullscreen=»true» sandbox=»allow-scripts allow-same-origin allow-popups allow-presentation»/> Нет! Они колеблются в вертикальной плоскости, но после одного полного цикла частицы остаются в том же положении, в котором они были в начале!
Свойства волны
Важно уметь обозначать различные свойства волны и давать словесное определение этим свойствам. В видео ниже показаны наиболее важные факторы:
Итак, резюмируем свойства волны:
Период времени и частота – осциллографы
Осциллографы позволяют отслеживать волну на электронно-лучевом экране. Форма волны, которую вы видите, называется трассировкой. На осциллограмме ось x представляет время, а ось y — амплитуду (в вольтах).
Форма волны, которую вы видите, называется трассировкой. На осциллограмме ось x представляет время, а ось y — амплитуду (в вольтах).
Осциллограф имеет настройки временной развертки и амплитуды напряжения. Скажем, настройка времени составляет 20 мс/дел. Это означает, что каждый квадрат оси x представляет время 20 мс. Используя эту информацию, мы можем определить временной период следа.
например: a) Осциллограф настроен на развертку 20 мс/дел. Каков период времени этой волны:
б) Какова частота этой волны?
прогрессивные волны вопросы 1
прогрессивные волны вопросы 1 с ответами
_________________________________________________________________
Волновое уравнение
Волновое уравнение связывает скорость волны (v ) к его частоте и длине волны.
Чтобы увидеть, как это получается, посмотрите видео ниже:
