
Разрешающая способность — потенциометр — Большая Энциклопедия Нефти и Газа, статья, страница 1
Разрешающая способность — потенциометр
Cтраница 1
Разрешающая способность потенциометра определяется точностью, с которой можно фиксировать положение подвижного контакта. Так как большинство потенциометров представляют собой намотанные сопротивления, то зависимость изменения сопротивления от положения контакта является, строго говоря, ступенчатой, а не непрерывной кривой. Число ступенек этой линии, а следовательно, и разрешающая способность, определяются общим числом витков провода, используемого для обмотки потенциометра. [2]
Разрешающая способность потенциометра определяет верхний предел точности, который может быть достигнут. Например, если разрешающая способность составляет 0 01 %, наибольшая возможная точность, которая может быть достигнута таким потенциометром, равна 0 05 %, но обычно она будет хуже. Потенциометр, имеющий практически нулевую разрешающую способность, является бесступенчатым потенциометром, в котором обмотка состоит из одной проволоки с высоким сопротивлением. По этой проволоке, образующей свой собственный сердечник, перемещается щетка. Так как сопротивление такого устройства ограничено удельным сопротивлением проволоки, то потенциометры могут быть получены с номинальным сопротивлением порядка 1500 ом и с точностью 0 03 % в конструкциях, имеющих вращение в пределах в 30 оборотов. [3]
Разрешающей способностью потенциометра является минимальное изменение выходного сопротивления, выраженное в процентах от полного сопротивления потенциометра. Разрешающая способность определяет верхний предел точности, который может быть достигнут. [4]
Разрешающей способностью потенциометра является минимальное изменение выходного сопротивления ( получаемое вращением вала), выраженное в процентах от полного сопротивления потенциометра. Она зависит от числа витков проволоки на единице длины обмотки и от диаметра дуги, по которой движется щетка. [5]
Для количественной оценки погрешности, обусловленной ступенчатостью, вводят понятие электрической разрешающей способности потенциометра бр. Разрешающая способность определяет максимально возможную точность работы потенциометрического датчика. [7]
В связи с развитием вычислительной техники и автоматических схем слежения и регулирования резко возросли требования к точности и разрешающей способности потенциометров. [9]
Потенциометры, используемые в следящих системах и в счетно-решающих устройствах, как правило, имеют диаметры от 25 до 125 мм и выполняются с проволочной обмоткой. Когда важны разрешающая способность потенциометра и его работа при высокой температуре, в потенциометрах используют проводящую пластмассу или проводящие пленки, наложенные на стекло. Изготовляются потенциометры с линейным и угловым перемещением. [10]
Установка позволяет также непрерывно записывать деформацию на бумажную ленту электронного потенциометра КСП-4. В качестве датчика используется многооборотный прецизионный потенциометр ППМЛ-М, вал которого связан с оськой соточного индикатора. Потенциометр ППМЛ-М работает как делитель постоянного напряжения, выход которого пропорционален перемещению ножки индикатора. Основная погрешность измерения определяется разрешающей способностью потенциометра ППМЛ-М и составила 3 — 5 мкм. [11]
Функциональные многооборотные потенциометры наматывают на цилиндрический изоляционный каркас, наружная поверхность которого имеет винтовую канавку. В эту канавку, имеющую вид резьбы, укладывают определенное количество витков проволоки необходимого диаметра. Подвижной контакт потенциометра, вращаясь вокруг каркаса, может скользить только вдоль витков обмотки, не перескакивая с одного витка на другой. Этим методом может быть обеспечена практически любая
Функциональные многооборотные потенциометры наматывают на цилиндрический изоляционный каркас, наружная поверхность которого имеет винтовую канавку. В эту канавку, имеющую вид резьбы, укладывают определенное количество витков проволоки необходимого диаметра. Подвижной контакт потенциометра, вращаясь вокруг каркаса, может скользить только вдоль витков обмотки, не перескакивая с одного витка на другой. Этим методом может быть обеспечена практически любая
Страницы: 1
Потенциометрические датчики
Назначение. Принцип действия
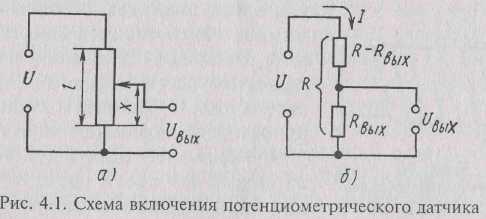
Потенциометрические датчики предназначены для преобразования механического перемещения в электрический сигнал. Основной частью датчика является реостат, сопротивление которого изменяется при перемещении движка, скользящего по проволоке (схема включения потенциометрического датчика показана на рис. 4.1, а). Напряжение питания подается на всю обмотку реостата через неподвижные выводы этой обмотки. Выходное напряжение, пропорциональное перемещению движка, снимается с одного из неподвижных выводов и с подвижного движка. Такая схема включения в электротехнике называется потенциометрической или схемой делителя напряжения.
Если сопротивление всей обмотки датчика обозначить через R, а сопротивление части этой обмотки, с которой снимается выходное напряжение, через Rвых, то потенциометрическая схема включения датчика может быть представлена как последовательное соединение резисторов с сопротивлением Rвых и (R— Rвых) (рис. 4.1, б). Ток через обмотку датчика I= U/R,
Uвых = IRвых = Ux/I.
Таким образом, выходной сигнал датчика пропорционален перемещению движка.
В автоматических системах движок может быть механически связан с каким-либо устройством (клапаном, рулем, антенной, режущим инструментом и т. п.), положение которого надо измерить и передать в виде электрического сигнала. Усилие, под действием которого перемещается движок, в этом случае весьма велико. Поэтому для обеспечения надежного контакта между движком и обмоткой следует иметь достаточно большую силу прижатия движка. В автоматических приборах для измерения различных неэлектрических величин движок датчика соединяется с чувствительным элементом, преобразующим контролируемую величину в перемещение. Усилие, развиваемое чувствительными элементами (мембранами, биметаллическими пластинами, поплавками и т. п.), невелико. Поэтому нельзя сильно прижимать движок к обмотке.
Наличие скользящего контакта снижает надежность потенциометрического датчика и является его основным недостатком. Для питания датчика может быть использовано как напряжение постоянного тока, так и напряжение переменного тока невысокой частоты. Входным сигналом датчика может быть не только линейное, но и угловое перемещение.
В зависимости от закона изменения сопротивления обмотки различают линейные и функциональные потенциометрические датчики.
Конструкции датчиков
Конструктивно потенциометрический датчик (рис. 4.2) состоит из каркаса 1, на который намотана в один слой обмотка 2 из тонкого провода. По виткам обмотки скользит движок (щетка)
К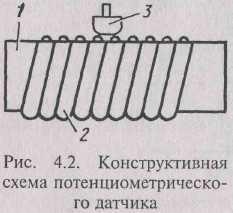 аркас
выполнен обычно плоским или в виде
цилиндра. Материалом каркаса может
быть изолятор (текстолит, гетинакс,
пластмасса, керамика) или металл, покрытый
слоем изоляции. Металлические каркасы
благодаря лучшей теплопроводности
позволяют получить большую мощность
электрического сигнала на выходе
датчика. В качестве материала для такого
каркаса может быть нанесен слой
оксидированного алюминия толщиной
около 10 мкм. При рассматривании в
лупу с двадцатикратным увеличением
слой не должен иметь трещин или
неровностей. Напряжение пробоя такого
слоя не менее 500 В.
аркас
выполнен обычно плоским или в виде
цилиндра. Материалом каркаса может
быть изолятор (текстолит, гетинакс,
пластмасса, керамика) или металл, покрытый
слоем изоляции. Металлические каркасы
благодаря лучшей теплопроводности
позволяют получить большую мощность
электрического сигнала на выходе
датчика. В качестве материала для такого
каркаса может быть нанесен слой
оксидированного алюминия толщиной
около 10 мкм. При рассматривании в
лупу с двадцатикратным увеличением
слой не должен иметь трещин или
неровностей. Напряжение пробоя такого
слоя не менее 500 В.
Для обмотки потенциометрического датчика чаще всего применяют провод из манганина, константана и других проводниковых материалов, имеющих малый температурный коэффициент сопротивления. При больших усилиях прижатия движка используется провод диаметром 0,1—0,3 мм, при малых усилиях прижатия — провод из сплавов, в состав которых входят платина, серебро, иридий, рубидий, осмий и др. Диаметр провода d таких точных датчиков выбирается в пределах 0,03—0,01 мм. Характеристики некоторых проводниковых материалов, используемых для потенциометрических датчиков, приведены в табл. 4.1.
Таблица 4.1. Материалы проводов, используемых для потенциометрических датчиков
Материал провода | Удельное сопротивление при t = 20 °С, Ом•мм2/м | Температурный коэффициент сопротивления α, 1/°С | Допустимая температура нагрева, °С |
Константан | 0,49 | (3÷4) • 10-6 | 500 |
Манганин | 0,42 | 6 ÷10-6 | 960 |
Нихром | 1,08 | (15÷20) • 10-6 | 110 |
Вольфрам | 0,056 | 464÷10-6 | 3400 |
Платиноиридиевый сплав | 0,23 | -111÷10-6 | 1780 |
Провод наматывается на каркас с некоторым натяжением. При этом необходимо, во-первых, чтобы при понижении температуры провод не распускался из-за разных температурных коэффициентов линейного расширения материалов провода и каркаса; во-вторых, чтобы при нагреве корпуса провод при растяжении не достигал предела упругости. Толщину каркаса не рекомендуется брать менее 4d, а радиус закругления на углах каркаса — менее 2d. После намотки провода на каркас для укрепления витков и предохранения их от смещения всю поверхность покрывают тонким равномерным слоем бескислотного лака. Полировка контактной поверхности обмотки (дорожки движения) производится вдоль витков абразивной шкуркой на бумажной основе, шлифовальным алмазным кругом с микропорошком, а проводов с эмалевой изоляцией — фетровым кругом. Ширина дорожки составляет обычно (2÷3)d.
При d=0,1÷0,3 мм движок потенциометрического датчика выполняется в виде пластинчатых щеток из серебра, серебра с палладием или (реже) фосфористой бронзы. Контактное усилие при этом принимается равным 0,05—0,1 Н, что обеспечивает силу трения не более 3 • 10-2 Н. Для точных датчиков при d< 0,1 мм движок делается из сплавов платины с иридием, бериллием или серебром в виде двух—пяти тонких параллельных проволок. Контактное усилие при этом принимается равным 10-3—10-2 Н, т. е. иногда оно достигает 2 • 10-4 Н (20 мг) на отдельный контакт. Столь малые контактные усилия необходимы для высокоточных потенциометрических датчиков, используемых, например, в ответственных космических объектах.
На рис. 4.3 приведена конструкция потенциометрического датчика для измерения угловых перемещений. Так же как и датчик линейных перемещений, он состоит из каркаса 1 с обмоткой 2, по которой скользит движок 3. Для съема сигнала с перемещающегося движка служит добавочная щетка 4, скользящая по токосъемному кольцу 5. Выходное напряжение датчика угловых перемещений пропорционально углу поворота подвижной части первичного измерителя, соединенного с осью движка.
В некоторых автоматических приборах в качестве потенциометрического датчика используют так называемый реохорд (рис. 4.4). Он представляет собой натянутую проволоку, по которой скользит ползунок. Сопротивление реохорда пропорционально перемещению ползунка. Часто реохорд используют не в потенциометрической схеме, а включают в плечо мостовой схемы. В этом случае перемещение движка преобразуется в изменение сопротивления R.


Характеристики линейного потенциометрического датчика
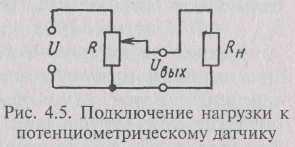
Основной характеристикой потенциометрического датчика является зависимость выходного напряжения Uвых от перемещения х. При равномерной намотке эта зависимость линейная только на холостом ходу, т. е. при отсутствии сопротивления нагрузки, подключенной к выходным зажимам датчика. В реальных условиях к этим зажимам подключаются электрические приборы, входное сопротивление которых является сопротивлением нагрузки для датчика (рис. 4.5).
Под нагрузкой обычно понимается ток нагрузки. Когда говорят, что «нагрузка отсутствует», то подразумевают, что именно ток нагрузки равен нулю. Сопротивление же нагрузки при этом, естественно, равно бесконечности. Следовательно, в режиме холостого хода (т. е. при отсутствии нагрузки) сопротивление нагрузки бесконечно велико.
Для анализа влияния сопротивления нагрузки RH на основную характеристику датчика, полное сопротивление обмотки которого R, введем понятие коэффициента нагрузки β = RH /R и α = х/1. Выходное напряжение датчика
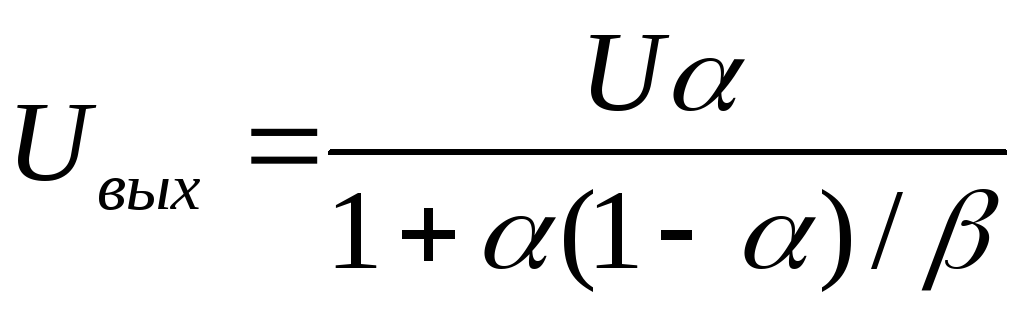
По этому уравнению построим зависимость Uвых /U = f(α), где U — напряжение питания датчика, для различных значений β (рис. 4.6). С уменьшением сопротивления нагрузки характеристика датчика становится нелинейной и возрастает ошибка преобразования. Относительная погрешность для нагруженного датчика может быть найдена сопоставлением выражений (4.1) и (4.2):
О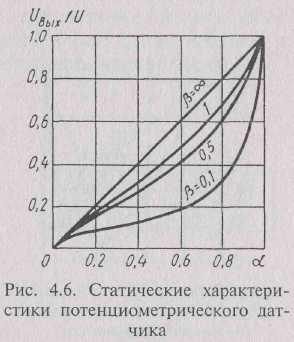 тношение
перемещения движка х к длине
намотки l обозначаем
через α= х/l. Если
датчик не нагружен, т. е. сопротивление
нагрузки RH =∞ и β = ∞, то выходное напряжение
линейно возрастает при изменении α от 0 до 1; Uвых = αU. Графически эта зависимость
изображается прямой линией. При наличии
сопротивления нагрузки RH, соизмеримого с сопротивлением обмотки R, эта зависимость
отличается от линейной, поскольку часть
тока, проходящего через датчик,
ответвляется в нагрузку. Ток, поступающий
от источника питания,
тношение
перемещения движка х к длине
намотки l обозначаем
через α= х/l. Если
датчик не нагружен, т. е. сопротивление
нагрузки RH =∞ и β = ∞, то выходное напряжение
линейно возрастает при изменении α от 0 до 1; Uвых = αU. Графически эта зависимость
изображается прямой линией. При наличии
сопротивления нагрузки RH, соизмеримого с сопротивлением обмотки R, эта зависимость
отличается от линейной, поскольку часть
тока, проходящего через датчик,
ответвляется в нагрузку. Ток, поступающий
от источника питания,
Или, подставляя RH= βR, имеем


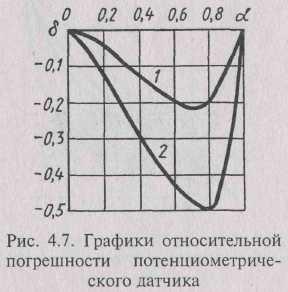
На рис. 4.7 построены кривые 1, 2, характеризующие относительную погрешность датчика при β =1; 0,5 соответственно. При больших β абсолютная величина максимальной погрешности δmах = (4/27) β при α= 2/3.
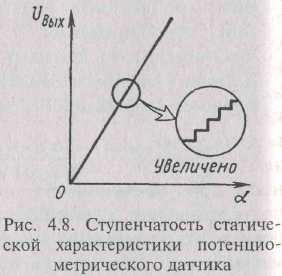
Важной характеристикой качества потенциометрического датчика является плавность изменения выходного напряжения. При перемещении движка по обмотке потенциометра происходит скачкообразное изменение сопротивления, поскольку движок как бы перескакивает с одного витка на другой. Это приводит к тому, что зависимость выходного напряжения от перемещения имеет ступенчатый вид (рис. 4.8). Число ступеней пропорционально, а их высота обратно пропорциональна числу витков обмотки. Реальная выходная характеристика имеет отклонения от идеальной (плавной, бесступенчатой) как вверх, так и вниз. Следовательно, погрешность, вызванная ступенчатостью, может быть как положительной, так и отрицательной и составляет половину напряжения UB, приходящегося на один виток намотки. Если обозначить через ω общее число витков потенциометра, то UB = U/ ω и погрешность ступенчатости ∆≤ U/(2 ω). Для количественной оценки погрешности, обусловленной ступенчатостью, вводят понятие электрической разрешающей способности потенциометра δр. Разрешающая способность определяет максимально возможную точность работы потенциометрического датчика. Улучшить ее можно, увеличивая число витков ω. Для этого можно либо удлинить намотанную часть потенциометра l (при заданном диаметре провода), либо уменьшить сечение провода. Уменьшение диаметра провода приводит к технологическим трудностям изготовления обмотки, но, самое главное, снижает надежность потенциометра, поскольку ухудшается механическая прочность обмотки и она быстрее истирается.
Увеличение длины обмотки, естественно, приводит к увеличению размеров всего потенциометра. Для устранения этого недостатка были разработаны многооборотные потенциометры.
Для улучшения разрешающей способности можно также применять движки с несколькими токосъемными контактами. На рис. 4.9 показан движок с двумя контактами 1 и 2, которые касаются обмотки 3 в двух диаметрально противоположных точках. Наличие двух параллельных контактов повышает и надежность потенциометра.
П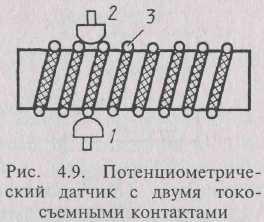 ринципиально
отсутствует погрешность, обусловленная
ступенчатостью у датчиков типа
реохорда, где движок скользит вдоль
натянутой проволоки. Эти датчики имеют
малое сопротивление и выходное напряжение,
т. е. низкую чувствительность, поэтому
в потенциометрических схемах включения
они не нашли практического применения.
Чувствительность датчика может быть
определена как первая производная
выходного напряжения по перемещению
движка. Для ненагруженного потенциометра
чувствительность потенциометра
пропорциональна напряжению питания
датчика и обратно пропорциональна длине
намотки.
ринципиально
отсутствует погрешность, обусловленная
ступенчатостью у датчиков типа
реохорда, где движок скользит вдоль
натянутой проволоки. Эти датчики имеют
малое сопротивление и выходное напряжение,
т. е. низкую чувствительность, поэтому
в потенциометрических схемах включения
они не нашли практического применения.
Чувствительность датчика может быть
определена как первая производная
выходного напряжения по перемещению
движка. Для ненагруженного потенциометра
чувствительность потенциометра
пропорциональна напряжению питания
датчика и обратно пропорциональна длине
намотки.
Реверсивные потенциометрические датчики
Выходное напряжение реверсивных датчиков изменяет знак (полярность) при изменении знака входного сигнала. В системах автоматического регулирования обычно требуются именно реверсивные (или двухтактные) датчики.
Схемы реверсивных потенциометрических датчиков показаны на рис. 4.10. В схеме на рис. 4.10, а используется потенциометр с неподвижным выводом от средней точки намотки. Выходное напряжение снимается с движка и средней точки. При переходе движка через среднюю точку выходное напряжение изменяет свой знак: при питании переменным током фаза изменяется на 180°, а постоянным током — полярность изменяется на противоположную. В следящих системах широко используется мостовая схема включения потенциометрических датчиков, показанная на рис. 4.10, б. Потенциометр П1 связан с входной осью следящей системы и является задающим. Потенциометр П2 имеет механическую связь с исполнительным устройством. Выходное напряжение (или ток нагрузки) определяется разницей в положении движков потенциометров П1 и П2, т. е. соответствует сигналу ошибки следящей системы. Знак сигнала ошибки зависит от того, больше или меньше угол поворота исполнительного вала по сравнению с углом поворота входного вала.
Выходное напряжение рассматриваемых
реверсивных схем может быть определено
на основании теоремы об эквивалентном
генераторе. Исследуемую систему
представим как цепь, состоящую из
четырехполюсника, источника питания с
напряжением Uo и сопротивления нагрузки RH. Тогда на основании известного из
электротехники метода можно утверждать,
что схема ведет себя, как цепь, составленная
из нагрузки RH и генератора с внутренним сопротивлением Rвых и
электродвижущей силой Е, равной
напряжению холостого хода Uх.
Сопротивление Rвых равно выходному сопротивлению
четырехполюсника, которое вычисляют
при закороченном источник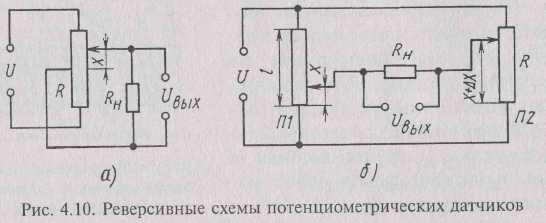 е
питания и отключенной нагрузке. Напряжение Ux измеряется на выходе рассматриваемой
схемы при отключенном сопротивлении
нагрузки Ян. Для
четырехполюсников по схемам рис. 4.10
выходное напряжение
е
питания и отключенной нагрузке. Напряжение Ux измеряется на выходе рассматриваемой
схемы при отключенном сопротивлении
нагрузки Ян. Для
четырехполюсников по схемам рис. 4.10
выходное напряжение
Uвых=UxRH(Rвых+RH)
Например, для схемы, изображенной на рис. 4.10, а, имеем
Ux = UH = U0 α /2,
Rвых=R α (1— α /2)/2.
Подставляя выражения (4.4) и (4.5) в формулу (4.3), получаем
Uвых=U0 α β >/( α-0,5 α 2+2 β),
Где β= RH/R.
Аналогичные вычисления позволяют получить для схемы рис. 4.10, б при одинаковых потенциометрах П1 и П2 уравнение выходного напряжения

где ∆α = ∆х/l — относительное рассогласование движков потенциометров П1 и П2; α = х/l — относительное перемещение движка задающего потенциометра П1; β = RH/ R — отношение сопротивления нагрузки RH к полному сопротивлению потенциометра R.
На рис 4.11 и 4.12 показаны выходные характеристики реверсивных потенциометрических датчиков, построенные соответственно по уравнениям (4.6) и (4.7). Характеристики построены при различных значениях коэффициента нагрузки р. Расчетные характеристики при холостом ходе (β = ∞) представляют собой прямые линии, т. е. являются линейными. С уменьшением сопротивления нагрузки увеличивается отклонение характеристики от линейной. Чувствительность датчика со средней точкой (рис. 4.10, а), как следует из уравнения (4.6) и рис. 4.11, в области малых отклонений, а практически не зависит от нагрузки и определяется равенством
Х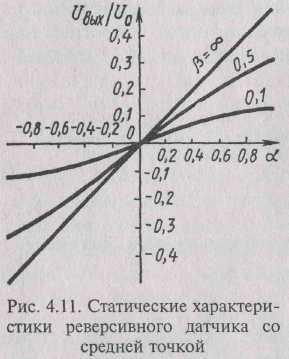
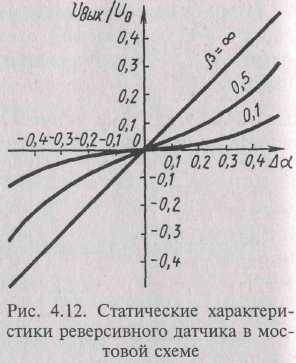 арактеристики,
изображенные на рис. 4.12, соответствуют
мостовой схеме (см. рис. 4.10, б) и
построены на основании формулы (4.7) для
случая, когда движок задающего
потенциометра установлен посередине
его намотки и, следовательно, α = 0,5, а
относительное рассогласование
движков ∆α может изменяться в пределах
от -0,5 до +0,5. Чувствительность мостовой
схемы зависит не только от нагрузки, но
и от положения движка задающего
потенциометра:
арактеристики,
изображенные на рис. 4.12, соответствуют
мостовой схеме (см. рис. 4.10, б) и
построены на основании формулы (4.7) для
случая, когда движок задающего
потенциометра установлен посередине
его намотки и, следовательно, α = 0,5, а
относительное рассогласование
движков ∆α может изменяться в пределах
от -0,5 до +0,5. Чувствительность мостовой
схемы зависит не только от нагрузки, но
и от положения движка задающего
потенциометра:
Анализ этого уравнения показывает, что наименьшее значение чувствительности будет при α = 0,5. Этому случаю и соответствуют характеристики, показанные на рис. 4.12.
В маломощных следящих системах в качестве нагрузки мостовой схемы может быть включен якорь исполнительного электродвигателя. При рассогласовании в положениях движков задающего и исполнительного потенциометров через якорь электродвигателя пойдет ток, значение которого будет соответствовать величине рассогласования (∆α), а направление — знаку рассогласования. Электродвигатель перемещает исполнительную ось следящей системы до тех пор, пока не будет устранено рассогласование.
Потенциометрический датчик — Википедия
Материал из Википедии — свободной энциклопедии
Потенциометри́ческий датчик (потенциометрический преобразователь) — датчик, входным сигналом которого является перемещение контакта, а выходным — напряжение, которое можно снять с этого контакта [1].
В общем случае, потенциометрический датчик представляет из себя катушку индуктивности (как правило, выполненную в виде неподвижного элемента конструкции), на которую подается питающее напряжение и щетки, с которых и снимается выходной сигнал.
Существуют два основных типа потенциометрических преобразователей:
- Преобразователи угловых перемещений.
- Преобразователи линейных перемещений.
Основные преимущества потенциометрических датчиков [2]: высокая точность и стабильность функции преобразования, малое значение переходного сопротивления, низкий уровень собственных шумов, небольшой коэффициент сопротивления.
Основные недостатки потенциометрических датчиков: небольшое значение разделительной способности, ограниченные возможности при использовании переменного тока, наличие скользящего контакта, что приводит к ограниченному количеству рабочих циклов датчика.
В состав любого потенциометрического преобразователя входят три основных элемента:
- Каркас, который изготавливается из материалов, обеспечивающих постоянство своих геометрических размеров в широком температурном диапазоне. И в то же самое время имеющий высокие показатели теплопроводности для рассеивания выделяющегося излишнего тепла при работе датчика.
- Обмотка, которая как правило изготавливается из проволоки с четко определенным шагом намотки. При этом разрешающая способность потенциометрического датчика напрямую зависит от шага обмотки. Чем меньше шаг, тем большую разрешающую способность обеспечивает преобразователь. Шаг, в свою очередь, зависит от диаметра проволоки. Например, в датчиках повышенной точности диаметр проволоки обмотки может быть порядка 0,1…0,4 мм
- Щетки, которые изготавливаются из чистых благородных металлов (как правило, платина или серебро). При этом материал щеток должен быть мягче материала обмотки, чтобы они не перетирались.
Разрешающая способность переменных резисторов | ldsound.ru
Разрешающая способность показывает, при каком наименьшем изменении угла поворота или перемещении подвижной системы может быть различимо изменение сопротивления резистора. Ее характеризуют минимально возможным изменением сопротивления резистора при весьма малом перемещении подвижного контакта. Количественно разрешающую способность выражают отношением скачка сопротивления или напряжения при перемещении (повороте) подвижного контакта к общему сопротивлению или к общему напряжению и рассчитывают, как правило, в процентах или в тысячных долях напряжения, подводимого к резистору.
У непроволочных резисторов разрешающая способность очень высокая и ограничивается дефектами резистивного элемента и контактной щетки, а также значением переходного сопротивления между проводящим слоем и подвижным контактом.
Разрешающая способность переменных проволочных резисторов зависит от числа витков проводящего элемента и определяется тем перемещением подвижного контакта, при котором происходит изменение установленного сопротивления. Поэтому часто разрешающую способность выражают в угловых единицах. Это тот угол, на который должен переместиться подвижный контакт, чтобы перейти с витка на виток (угловой градус обмотки).
Угловая разрешающая способность при равномерном шаге намотки ∆y=α/n, где α – угол поворота подвижной системы в пределах угла намотки резистивного элемента; n – число витков.
Рабочий электрический угол, в отличии от механического (от упора до упора), представляет собой угол поворота подвижной системы, в пределах которого происходит изменение сопротивления (напряжения) и обеспечивается получение заданно характеристики. Связано это с тем, что часть витков на концах обмотки оказывается вне зоны активного участка, поэтому и существует разница между рабочими электрическими и механическими углами.
При перемещении подвижного контакта с витка на виток наименьшее приращение выходного напряжения:
∆Uвых равно Uвх/n,
где Uвх – рабочее или входное напряжение, подводимое к резистору.
Тогда так называемая электрическая разрешающая способность:
∆=Uвых/Uвх·100=Uвх/nUвх·100=(I/n)·100%.
Отсюда видно, что разрешающая способность обратно пропорциональна числу витков обмотки. Чем больше витков содержит резистивный элемент, тем выше разрешающая способность, меньше скачки напряжения и выше точность воспроизведения функциональной характеристики.
Получаемая расчетным путем разрешающая способность переменных резисторов подтверждается экспериментально при разработке и впоследствии гарантируется конструкцией и технологией изготовления. Разрешающая способность переменных резисторов общего назначения находится в пределах 0,1-3%, а прецизионных – до тысячных долей процента.
Для переменных резисторов с выключателем введено понятие «угол срабатывания выключателя» – угол поворота подвижной системы от упора (в положении «выключено») до положения, при котором происходит срабатывания выключателя.
Из справочника резисторов
3. Характеристики линейного потенциометрического датчика
Основной
характеристикой потенциометрического
датчика является зависимость выходного
напряжения  от перемещениях. При
равномерной намотке эта зависимость
линейная только на холостом ходу, т. е.
при отсутствии сопротивления нагрузки,
подключенной к выходным зажимам датчика.
В реальных условиях к этим зажимам
подключаются электрические приборы,
входное сопротивление которых является
сопротивлением нагрузки для датчика
(рис. 4.5).
от перемещениях. При
равномерной намотке эта зависимость
линейная только на холостом ходу, т. е.
при отсутствии сопротивления нагрузки,
подключенной к выходным зажимам датчика.
В реальных условиях к этим зажимам
подключаются электрические приборы,
входное сопротивление которых является
сопротивлением нагрузки для датчика
(рис. 4.5).
Под нагрузкой обычно понимается ток нагрузки. Когда говорят, что «нагрузка отсутствует», то подразумевают, что именно ток нагрузки равен нулю. Сопротивление же нагрузки при этом, естественно, равно бесконечности. Следовательно, в режиме холостого хода (т. е. при отсутствии нагрузки) сопротивление нагрузки бесконечно велико.
Для
анализа влияния сопротивления нагрузки RH на основную характеристику
датчика, полное сопротивление обмотки
которого R, введем понятие коэффициента нагрузки  и
и .
Выходное напряжение датчика
.
Выходное напряжение датчика
 (2)
(2)
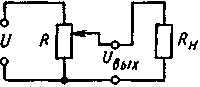
Рис. 5. Подключение нагрузки к потенциометрическому датчику.
По
этому уравнению построим зависимость  ,
гдеU — напряжение питания
датчика, для различных значений
,
гдеU — напряжение питания
датчика, для различных значений  (рис. 6). С уменьшением сопротивления
нагрузки характеристика датчика
становится нелинейной и возрастает
ошибка преобразования. Относительная
погрешность для нагруженного датчика
может быть найдена сопоставлением
(рис. 6). С уменьшением сопротивления
нагрузки характеристика датчика
становится нелинейной и возрастает
ошибка преобразования. Относительная
погрешность для нагруженного датчика
может быть найдена сопоставлением выражений (1) и (2):
выражений (1) и (2):
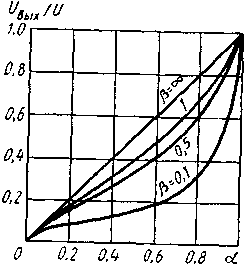
Рис.6Статическиехарактеристики
Отношение
перемещения движка х к длине намотки I обозначаем потенциометрического датчика
через  .
Если датчик не нагружен,
т. е. сопротивление нагрузки
.
Если датчик не нагружен,
т. е. сопротивление нагрузки  и
и ,
то выходное напряжение линейно возрастает
при изменении
,
то выходное напряжение линейно возрастает
при изменении  от 0 до 1;
от 0 до 1;  .
Графически эта зависимость изображается
прямой линией. При наличии сопротивления
нагрузки
.
Графически эта зависимость изображается
прямой линией. При наличии сопротивления
нагрузки  ,
соизмеримого с сопротивлением обмоткиR, эта
зависимость отличается от линейной,
поскольку часть тока, проходящего через
датчик, ответвляется в нагрузку. Ток,
поступающий от источника питания,
,
соизмеримого с сопротивлением обмоткиR, эта
зависимость отличается от линейной,
поскольку часть тока, проходящего через
датчик, ответвляется в нагрузку. Ток,
поступающий от источника питания,
или,
подставляя  ,
имеем
,
имеем
На
рис. 7 построены кривые 1,
2, характеризующие
относительную погрешность датчика при β=1;
0,5 соответственно. При больших β абсолютная величина максимальной
погрешности  при
при 
Важной
характеристикой качества потенциометрического
датчика является плавность изменения
выходного напряжения. При перемещении
движка по обмотке потенциометра
происходит скачкообразное изменение
сопротивления, поскольку движок как бы
перескакивает с одного витка на другой.
Это приводит к тому, что зависимость
выходного напряжения от перемещения
имеет ступенчатый вид (рис. 8). Число
ступеней пропорционально, а их высота
обратно пропорциональна числу витков
обмотки. Реальная выходная характеристика
имеет отклонения от идеальной (плавной,
бесступенчатой) как вверх, так и вниз.
Следовательно, погрешность, вызванная
ступенчатостью, может быть как
положительной, так и отрицательной и
составляет половину напряжения UB, приходящегося
на один виток намотки. Если обозначить
через ω общее
число витков потенциометра, то  и погрешность ступенчатости
и погрешность ступенчатости .
Для количественной оценки погрешности,
обусловленной ступенчатостью, вводят
понятие электрической разрешающей
способности потенциометра
.
Для количественной оценки погрешности,
обусловленной ступенчатостью, вводят
понятие электрической разрешающей
способности потенциометра .
Разрешающая способность определяет
максимально возможную точность работы
потенциометрического датчика. Улучшить
ее можно, увеличивая число витковw.
Для этого можно либо удлинить намотанную
часть потенциометра 1 (при заданном диаметре провода), либо
уменьшить сечение провода. Уменьшение
диаметра провода приводит к технологическим
трудностям изготовления обмотки, но,
самое главное, снижает надежность
потенциометра, поскольку ухудшается
механическая прочность обмотки и она
быстрее истирается.
.
Разрешающая способность определяет
максимально возможную точность работы
потенциометрического датчика. Улучшить
ее можно, увеличивая число витковw.
Для этого можно либо удлинить намотанную
часть потенциометра 1 (при заданном диаметре провода), либо
уменьшить сечение провода. Уменьшение
диаметра провода приводит к технологическим
трудностям изготовления обмотки, но,
самое главное, снижает надежность
потенциометра, поскольку ухудшается
механическая прочность обмотки и она
быстрее истирается.
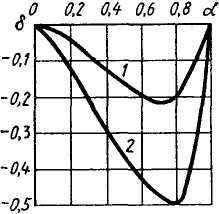 Рис.7.
Графики относительной погрешности
потенциометрического датчика
Рис.7.
Графики относительной погрешности
потенциометрического датчика
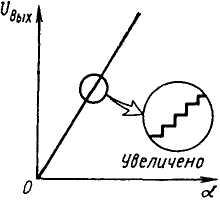 Рис.
8. Ступенчатость статической характеристики
потенциометрического датчика
Рис.
8. Ступенчатость статической характеристики
потенциометрического датчика
Увеличение длины обмотки, естественно, приводит к увеличению размеров всего потенциометра. Для устранения этого недостатка были разработаны многооборотные потенциометры.
Для улучшения разрешающей способности можно также применять движки с несколькими токосъемными контактами. На рис. 9 показан движок с двумя контактами 1 и 2, которые касаются обмотки 3 в двух диаметрально противоположных точках. Наличие двух параллельных контактов повышает и надежность потенциометра.
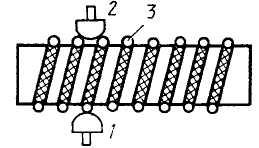 Рис.
9. Потенциометрический датчик с двумя
токосъемными контактами
Рис.
9. Потенциометрический датчик с двумя
токосъемными контактами
Принципиально отсутствует погрешность, обусловленная ступенчатостью у датчиков типа реохорда, где движок скользит вдоль натянутой проволоки. Эти датчики имеют малое сопротивление и выходное напряжение, т. е. низкую чувствительность, поэтому в потенциометрических схемах включения они не нашли практического применения. Чувствительность датчика может быть определена как первая производная выходного напряжения по перемещению движка. Для ненагруженного потенциометра чувствительность потенциометра пропорциональна напряжению питания датчика и обратно пропорциональна длине намотки.
3. Характеристики линейного потенциометрического датчика
Основной
характеристикой потенциометрического
датчика является зависимость выходного
напряжения  от перемещениях. При
равномерной намотке эта зависимость
линейная только на холостом ходу, т. е.
при отсутствии сопротивления нагрузки,
подключенной к выходным зажимам датчика.
В реальных условиях к этим зажимам
подключаются электрические приборы,
входное сопротивление которых является
сопротивлением нагрузки для датчика
(рис. 4.5).
от перемещениях. При
равномерной намотке эта зависимость
линейная только на холостом ходу, т. е.
при отсутствии сопротивления нагрузки,
подключенной к выходным зажимам датчика.
В реальных условиях к этим зажимам
подключаются электрические приборы,
входное сопротивление которых является
сопротивлением нагрузки для датчика
(рис. 4.5).
Под нагрузкой обычно понимается ток нагрузки. Когда говорят, что «нагрузка отсутствует», то подразумевают, что именно ток нагрузки равен нулю. Сопротивление же нагрузки при этом, естественно, равно бесконечности. Следовательно, в режиме холостого хода (т. е. при отсутствии нагрузки) сопротивление нагрузки бесконечно велико.
Для
анализа влияния сопротивления нагрузки RH на основную характеристику
датчика, полное сопротивление обмотки
которого R, введем понятие коэффициента нагрузки  и
и .
Выходное напряжение датчика
.
Выходное напряжение датчика
 (2)
(2)
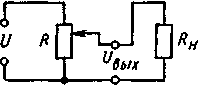
Рис. 5. Подключение нагрузки к потенциометрическому датчику.
По
этому уравнению построим зависимость  ,
гдеU — напряжение питания
датчика, для различных значений
,
гдеU — напряжение питания
датчика, для различных значений  (рис. 6). С уменьшением сопротивления
нагрузки характеристика датчика
становится нелинейной и возрастает
ошибка преобразования. Относительная
погрешность для нагруженного датчика
может быть найдена сопоставлением
(рис. 6). С уменьшением сопротивления
нагрузки характеристика датчика
становится нелинейной и возрастает
ошибка преобразования. Относительная
погрешность для нагруженного датчика
может быть найдена сопоставлением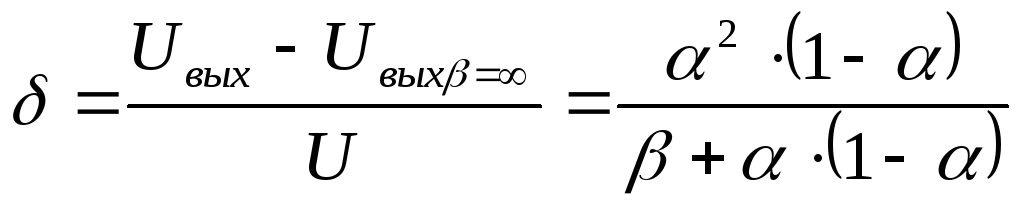 выражений (1) и (2):
выражений (1) и (2):
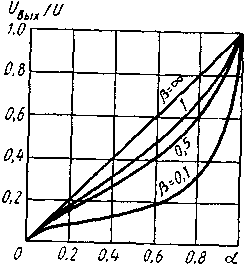
Рис.6Статическиехарактеристики
Отношение
перемещения движка х к длине намотки I обозначаем потенциометрического датчика
через  .
Если датчик не нагружен,
т. е. сопротивление нагрузки
.
Если датчик не нагружен,
т. е. сопротивление нагрузки  и
и ,
то выходное напряжение линейно возрастает
при изменении
,
то выходное напряжение линейно возрастает
при изменении  от 0 до 1;
от 0 до 1;  .
Графически эта зависимость изображается
прямой линией. При наличии сопротивления
нагрузки
.
Графически эта зависимость изображается
прямой линией. При наличии сопротивления
нагрузки  ,
соизмеримого с сопротивлением обмоткиR, эта
зависимость отличается от линейной,
поскольку часть тока, проходящего через
датчик, ответвляется в нагрузку. Ток,
поступающий от источника питания,
,
соизмеримого с сопротивлением обмоткиR, эта
зависимость отличается от линейной,
поскольку часть тока, проходящего через
датчик, ответвляется в нагрузку. Ток,
поступающий от источника питания,
или,
подставляя  ,
имеем
,
имеем
На
рис. 7 построены кривые 1,
2, характеризующие
относительную погрешность датчика при β=1;
0,5 соответственно. При больших β абсолютная величина максимальной
погрешности  при
при 
Важной
характеристикой качества потенциометрического
датчика является плавность изменения
выходного напряжения. При перемещении
движка по обмотке потенциометра
происходит скачкообразное изменение
сопротивления, поскольку движок как бы
перескакивает с одного витка на другой.
Это приводит к тому, что зависимость
выходного напряжения от перемещения
имеет ступенчатый вид (рис. 8). Число
ступеней пропорционально, а их высота
обратно пропорциональна числу витков
обмотки. Реальная выходная характеристика
имеет отклонения от идеальной (плавной,
бесступенчатой) как вверх, так и вниз.
Следовательно, погрешность, вызванная
ступенчатостью, может быть как
положительной, так и отрицательной и
составляет половину напряжения UB, приходящегося
на один виток намотки. Если обозначить
через ω общее
число витков потенциометра, то  и погрешность ступенчатости
и погрешность ступенчатости .
Для количественной оценки погрешности,
обусловленной ступенчатостью, вводят
понятие электрической разрешающей
способности потенциометра
.
Для количественной оценки погрешности,
обусловленной ступенчатостью, вводят
понятие электрической разрешающей
способности потенциометра .
Разрешающая способность определяет
максимально возможную точность работы
потенциометрического датчика. Улучшить
ее можно, увеличивая число витковw.
Для этого можно либо удлинить намотанную
часть потенциометра 1 (при заданном диаметре провода), либо
уменьшить сечение провода. Уменьшение
диаметра провода приводит к технологическим
трудностям изготовления обмотки, но,
самое главное, снижает надежность
потенциометра, поскольку ухудшается
механическая прочность обмотки и она
быстрее истирается.
.
Разрешающая способность определяет
максимально возможную точность работы
потенциометрического датчика. Улучшить
ее можно, увеличивая число витковw.
Для этого можно либо удлинить намотанную
часть потенциометра 1 (при заданном диаметре провода), либо
уменьшить сечение провода. Уменьшение
диаметра провода приводит к технологическим
трудностям изготовления обмотки, но,
самое главное, снижает надежность
потенциометра, поскольку ухудшается
механическая прочность обмотки и она
быстрее истирается.
 Рис.7.
Графики относительной погрешности
потенциометрического датчика
Рис.7.
Графики относительной погрешности
потенциометрического датчика
 Рис.
8. Ступенчатость статической характеристики
потенциометрического датчика
Рис.
8. Ступенчатость статической характеристики
потенциометрического датчика
Увеличение длины обмотки, естественно, приводит к увеличению размеров всего потенциометра. Для устранения этого недостатка были разработаны многооборотные потенциометры.
Для улучшения разрешающей способности можно также применять движки с несколькими токосъемными контактами. На рис. 9 показан движок с двумя контактами 1 и 2, которые касаются обмотки 3 в двух диаметрально противоположных точках. Наличие двух параллельных контактов повышает и надежность потенциометра.
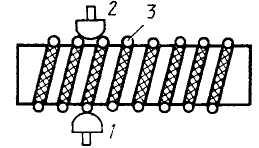 Рис.
9. Потенциометрический датчик с двумя
токосъемными контактами
Рис.
9. Потенциометрический датчик с двумя
токосъемными контактами
Принципиально отсутствует погрешность, обусловленная ступенчатостью у датчиков типа реохорда, где движок скользит вдоль натянутой проволоки. Эти датчики имеют малое сопротивление и выходное напряжение, т. е. низкую чувствительность, поэтому в потенциометрических схемах включения они не нашли практического применения. Чувствительность датчика может быть определена как первая производная выходного напряжения по перемещению движка. Для ненагруженного потенциометра чувствительность потенциометра пропорциональна напряжению питания датчика и обратно пропорциональна длине намотки.
Переменные резисторы | Потенциометры
Все электронные компоненты делятся на два класса активные и пассивные. К классу пассивных относятся резисторы.
Резисторы относятся к наиболее распространенным деталям радиоэлектронной аппаратуры. На их долю приходится от 20 до 45%, т. е. почти до половины общего количества радиодеталей в устройстве. Напомним основные теоретические положения.
Принцип работы резистора.
Принцип работы резисторов основан на использовании свойства материалов оказывать сопротивление протекающему току. Функция резисторов — это регулирование и распределение электрической энергии между цепями и элементами схем.
В зависимости от выполняемых функций различают:
- резисторы постоянные, с фиксированной при изготовлении величиной сопротивления,
- и переменные резисторы, величина сопротивления которых может быть изменена путем перемещения подвижного контакта.
Известны два способа включения переменных резисторов в схему: потенциометрический и реостатный.
Под «потенциометром » понимают переменный резистор, предназначенный для работы в потенциометрической схеме.
На практике широкое распространение получили оба способа, используемые в равной мере. Производитель и поставщик электронных компонентов заранее не может знать, в какой именно схеме будет использоваться его изделие.
Напомним, что термин «потенциометр», имеет два совершенно различные значения:
1. электроизмерительный компенсатор, прибор для определения ЭДС или напряжений компенсационным методом измерений.
С использованием мер сопротивления потенциометр может применяться для измерения тока, мощности и др. электрических величин, а с использованием соответствующих измерительных преобразователей — для измерения различных неэлектрических величин: температуры, давления, состава газов ( со-потенциометр обратной связи представляет собой резистивный делитель напряжения, с включенными последовательно резистором и потенциометром между входным контактом контроллера и заземлением), плотности.
Различают потенциометры постоянного и переменного тока.
В потенциометре постоянного тока измеряемое напряжение сравнивается с эдс нормального элемента. Поскольку в момент компенсации ток в цепи измеряемого напряжения равен нулю, измерения производятся без отбора мощности от объекта измерения. Точность измерений при помощи таких потенциометров достигает 0,01%, а иногда и выше.
В электронных автоматических потенциометрах, как постоянного, так и переменного тока измерения напряжения выполняются автоматически; при этом компенсация измеряемого напряжения осуществляется посредством исполнительного механизма (электродвигателя), перемещающего соответствующие движки на сопротивлениях (реохордах) потенциометра.
Исполнительный механизм управляется напряжением небаланса (разбаланса) — разностью между компенсируемым и компенсирующим напряжениями.
Результаты измерений в электронных автоматических потенциометрах выводятся в цифровой форме, что позволяет вводить полученные данные непосредственно в ЭВМ. Помимо измерений, электронные автоматические потенциометры могут выполнять функции регулирования параметров производственных процессов.
В этом случае движок реохорда устанавливают в определённое положение, задающее, например, требуемую температуру объекта регулирования, а напряжение небаланса потенциометры подают на исполнительный механизм, соответственно увеличивающий (уменьшающий) электрический нагрев или регулирующий поступление горючего.
Цифровые потенциометры являются надежной альтернативой механическим потенциометрам и превосходят их по прочности конструкции, точности разрешения, низкому уровню шумов, а также по возможности дистанционного управления.
Конструктивно потенциометры выполнены в виде цепи последовательно соединенных резисторов с управлением токосъема посредством внешнего интерфейса. Выпускаются устройства с линейной или логарифмической зависимостью сопротивления от положения движка. Также, в корпусе микросхемы может быть интегрировано до шести цифровых потенциометров.
2. Делитель напряжения с плавным регулированием сопротивления, устройство (в простейшем случае в виде проводника с большим омическим сопротивлением, снабженного скользящим контактом), при помощи которого на вход электрической цепи может быть подана часть данного напряжения.
Такие делители напряжения применяются в радиотехнике и электротехнике, в аналоговой вычислительной и в измерительной технике, а также в системах автоматики, например в качестве датчиков линейных и угловых перемещений.
Мы используем второе значение термина «потенциометр».
Очень часто вместо термина «потенциометр» используют термин «переменный резистор». Однозначного подхода к использованию терминов нет.
Так ряд производителей в кодировке своих изделий потенциометров используют термин «переменный резистор» и первые символы кода представляют как «RV» от слов «Resisror variable «, но в технической документации (спецификации, чертежах описании и т. д. ) используют термин «потенциометр».
Переменный резистор как регулируемый делитель является универсальным изделием для различных приложений.
Основные принципы работы переменного резистора.
При помощи подвижного ползунка некоторый потенциал снимается с элемента сопротивления, имеющего определенное общее напряжение. Следуя этому принципу деления напряжения переменный резистор может использоваться как источник стандартных значений и как датчик позиций. Допустимое напряжение зависит от размера и общего сопротивления.
Элементы сопротивления переменного резистора
Различают следующие элементы сопротивления:
а) Проволока как элемент сопротивления — это очень традиционное исполнение.
В зависимости от значения общего сопротивления используются различные металлические легирующие элементы. Преимущества проволоки, как элемента сопротивления: возможны малые допуски на линейность, на сопротивление и на температурный коэффициент.
Сопротивления общего назначения могут изготавливаться малыми сериями. При этом переменные резисторы отличают прекрасные электрические данные, низкие затраты на изготовление, высокая гибкость.
Недостатками являются низкая разрешающая способность из-за перехода с витка на виток, относительно невысокий срок эксплуатации из-за стирания, высокий электрический уровень шума связанный с износом, малая пригодность при ударных и вибрационных нагрузках и высокой скорости перестановки.
б) Элементы сопротивления гибридной техники.
Эта техника предлагается на рынке лишь немногими изготовителями. Она представлена промежуточным решением между проволокой и проводящими искусственными материалами, как элементами сопротивления. Витки проволоки заполняются в специальном процессе в толстослойной массе и весь элемент покрывается этой пастой.
в) Проводящие искусственные материалы как элементы сопротивления.
Эта современная технология используется прежде всего в современных одновитковых переменных резисторах, и при этом может быть достигнут очень высокий срок их эксплуатации.
Преимущества этой техники: очень высокий срок эксплуатации, практически бесконечная разрешающая способность, высокая устойчивость к ударным и вибрационным нагрузкам, высокое число оборотов.
Однако, малые допуски при этом реализовать достаточно трудно, отсюда дороговизна изделий. Плохой температурный коэффициент делает их пригодными только для потенциометров с <360° p=»»>
Механический угол поворота потенциометра
Очень часто и особенно рукой тяжело установить точное желаемое значение, так как это требует точного позиционирования оси переменного резистора, соединенной с ползунком на высокоразрешающем элементе сопротивления. Поэтому различают:
а) Многооборотный переменный резистор.
Примером таких резисторов являются СП5-35. Много лет уже широко известен прецизионный резистор на 10 механических оборотов, то есть с механическим углом поворота до 360°. Исполнение в проволочной гибридной технике может быть приобретено за очень низкую цену.
Из-за очень больших количеств таких переменных резисторов выпускаемых в мире они используются как точные регулировщики напряжения на передних платах измерительных, управляющих и регулирующих приборов. Чем больше механический угол поворота, и тем самым механическое число поворотов, тем выше точность установки.
б) Переменный резистор с одним механическим оборотом (угол поворота 360°)
Этот вид часто используется как аналоговый датчик угла поворота. Для многих применений вполне достаточно одного поворота для всего интервала сопротивления, особенно если весь интервал сопротивления должен быстро выставляться.
Механические виды — наиболее часто используемыми видами являются:
а) Крепления в одной точке
Такие крепления часто используются в сочетании с регуляторами ручного управления или при малых скоростях установки.
Прецизионные резисторы с одноточечным креплением почти всегда оснащены прецизионным подшипником скольжения в нарезной втулке. Поэтому оно рекомендуется только для медленной скорости установки без радиальных и аксиальных нагрузок на ось резистора. Эти переменные резисторы экономически более выгодны, чем соответствующие им резисторы с сервофланцем или с шарикоподшипником.
б) Прецизионный резистор с синхрофланцем (сервофланцем либо шарикоподшипником)
Такие подшипники используются чаще всего в сочетании с моторами и другими элементами привода. Подшипником почти всегда является прецизионный шарикоподшипник, который выдерживает намного более высокое число оборотов, как и более высокие аксиальные и радиальные нагрузки.
При этом монтаж происходит либо с тремя нарезными отверстиями в фланце, либо с тремя, так называемыми, синхронизационными скобами. Такое строение используется в первую очередь для применения потенциометра, как аналогового датчика угла.
Моторные переменные резисторы.
В измерительной, управляющей и регулирующей технике очень часто переменные резисторы используются с приводом от различных моторов.
Существуют различные моторы:
- маленькие моторы постоянного тока (якорь без железа), особенно пригодные для самых низких напряжений разбега,
- миниатюрные шаговые моторы,
- сервомоторы переменного тока.
Все эти моторы могут быть снабжены жесткой передачей с большим числом редуцирований. Основа моторных резисторов включает в себя прежде всего соответствующее сопряжение (а также скользящее сопряжение) как и необходимые детали крепления.
Переменные резисторы характеризуются следующими основными параметрами.
Номинальное значение сопротивления Rном. Измеряется в омах (Ом), килоомах (кОм), мегаомах (мОм). Номинальные значения сопротивлений указывают на корпусе изделия.
Допустимое отклонение действительного сопротивления от его номинального значения. Это отклонение измеряется в процентах, оно нормировано и определяется классом точности.
Номинальное значение мощности рассеивания переменного резистора Rном. Этот параметр измеряется в ваттах (Вт). Это наибольшая мощность постоянного или переменного тока, при протекании которого через переменный резистор он может работать длительное время без повреждений.
Мощность Рном, ток I, протекающий через резистор, падение напряжения U на резисторе и его сопротивление r связаны зависимостью: P=UI U=IRВ большинстве устройств радиоэлектронной аппаратуры применяют переменные резисторы с номинальной мощностью рассеивания от 0,05 до 2 Вт.
Температурный коэффициент сопротивления (ТКС) резистора. Характеризует относительное изменение сопротивления переменного резистора при изменении температуры окружающей среды на 1 °С и выражается в процентах.
В резисторах ТКС незначительный и составляет в среднем десятые доли — единицы процента. Собственные индуктивность и емкость. Определяются габаритными размерами, конструкцией и влияют на частотный диапазон применения резисторов.
Функциональные и конструктивные особенности переменных резисторов.
Таких характеристик несколько. Перечислим их.
Функциональная зависимость (кривая регулирования). Кривая, которая показывает зависимость величины сопротивления между подвижным контактом и одним из неподвижных контактов проводящего элемента от угла поворота. По характеру функциональной зависимости переменные резисторы разделяются на линейные и нелинейные. Характер нелинейной зависимости определяется схемными задачами, для решения которых предназначен резистор. Наиболее распространенные нелинейные зависимости — логарифмические и обратно-логарифмические.
Разрешающая способность.
Важная характеристика переменных резисторов, показывающая, какое наименьшее изменение угла поворота подвижной системы резистора может быть различимо.
Ее характеризуют минимально допустимым изменением сопротивления при весьма малом перемещении подвижного контакта. У непроволочных резисторов разрешающая способность теоретически неограниченна и лимитируется дефектами и неоднородностями проводящего слоя, контактной щетки и величиной переходного контактного сопротивления.
Шумы вращения.
При вращении подвижной системы резистора, помимо тепловых и токовых шумов на выходное напряжение, зависящее от угла поворота, накладывается еще одна составляющая — напряжение шумов вращения. Их уровень значительно превышает тепловые и токовые шумы в резисторе и достигает 30 –40 дБ. Шумы вращения особенно характерны для непроволочных потенциометров.
Источниками шумов вращения могут быть: шумы переходного сопротивления, возникающие в результате появления контактной разности потенциалов между щеткой и резистивным элементом; термоэлектродвижущая сила, возникающая от нагрева проводящего элемента при быстром вращении подвижной системы.
<< Предыдущая Следующая >>