
Почему бесщеточные электродвигатели набирают популярность?
Все больше самых различных моделей электроинструментов применяют на себе бесщеточные электродвигатели. Дело доходит даже до отбойных молотков
Прогресс не стоит на месте, то и дело внедряются новые разработки, благодаря которым техника становится лучше и совершеннее. Так, на смену классических электрических двигателей постепенно приходят бесщеточные (вентильные). Стоит подробнее рассказать о том, по какому принципу они работают, чем отличаются от обычных и в чем их превосходят.
Принцип работы бесщеточного двигателя
В бесщеточном двигателе щеточно-коллекторный узел заменен полупроводниковым коммутатором. Он работает за счет электрических приводов, которые создают магнитное вращающееся поле. Это конструкция нового типа, в которой обмотки на статоре или элементах ротора нет. Разработка такого двигателя – результат использования материалов с большой коэрцитивной силой и уровнем магнитного насыщения, позволяющим получить сильное магнитное поле.
Отсутствие обмотки ротора и механических коммутационных элементов – те технические решения, которые позволяют создавать надежные двигатели по доступной цене. Эти решения существенно упрощают сам процесс их изготовления.
Бесщеточный двигатель может работать как на переменном, так и на непрерывном токе. В случае с непрерывным током он похож на коллекторный двигатель, но у последнего более сложная конструкция, так как основа непременно содержит электронный коммутатор.
Характерные особенности и преимущества бесщеточных двигателей
Бесщеточный двигатель имеет функционал щеточного, но превосходит его по ряду параметров. Единственным его недостатком можно назвать то, что по стоимости он пока превосходит аналоги с классическим мотором, но этот момент в полной мере компенсируется большим перечнем достоинств устройства. Основные преимущества механизма:
- эффективность;
- при намагничивании нет изменений, как и при утечке тока;
- энергонасыщенность;
- скорость вращения и вращающий момент полностью соответствуют;
- большой диапазон смены частоты вращения;
- скорость не зависит от центробежной силы;
- нет узлов, которые нужно часто обслуживать;
- в конструкции применяются легкие и небольшие магниты;
- не нужны коммутатор и обмотка возбуждения.

Сферы применения бесщеточных двигателей
Вентильные двигатели постоянного тока, как правило, применяются для оборудования с мощностью не выше 5 кВт. Для оборудования мощнее использовать такие двигатели нецелесообразно. Постоянные магниты в бесщеточных моторах очень чувствительны к воздействию мощных полей и высоких температур, что нехарактерно для щеточных и индукционных аналогов.
Бесщеточные двигатели надежны и хорошо управляемы, поэтому они используются повсеместно, как для мелких механизмов, так и для крупных. Они применяются в автомобильных приводах, электрических мотоциклах, компьютерах, электроинструменте, бытовой технике. Двигатели очень востребованы в промышленности, авиационной технике. Благодаря отсутствию коллекторного узла такие двигатели можно использовать даже в опасных условиях, местах с повышенным уровнем влажности.
Metabo выходит на новый уровень, внедряя бесщеточные двигатели в свою технику
Компания Metabo летом 2019 года презентовала широкой аудитории инновационную для отечественного рынка серию отбойных молотков и сетевых перфораторов SDS-Max. Устройства этой линейки оснащены бесщеточными двигателями, что выгодно отличает их от большинства аналогов. В сетевом инструменте такие двигатели пока применяются не слишком часто, особенно если инструмент очень мощный.
Устройства этой линейки оснащены бесщеточными двигателями, что выгодно отличает их от большинства аналогов. В сетевом инструменте такие двигатели пока применяются не слишком часто, особенно если инструмент очень мощный.
Сетевые инструменты с бесщеточными двигателями обладают всеми теми же преимуществами, что и аккумуляторные инструменты. Ключевые достоинства:
- Бесколлекторная схема повышает КПД мотора. Если сравнить бесщеточный перфоратор Metabo с обыкновенным, то при равном потреблении сетевой мощности оборудование Metabo будет меньше греться и выполнит больше функций.
- Высокая надежность. Инструмент с вентильным двигателем имеет более длительный срок эксплуатации, чем обычный, и не нуждается в частом обслуживании. В нем не нужно будет менять щетки, поэтому расходы на ремонт и обслуживания будут существенно снижены. По технике с высоким уровнем вибрации, как отбойные молотки и перфораторы, преимущество отсутствия щеток в двигателе особенно заметно.
- Частоту вращения мотора легко регулировать и поддерживать на необходимом уровне, даже при увеличении нагрузки, перепадах напряжения, ухудшении формы напряжения. Бесщеточные перфораторы и отбойные молотки Metabo будут высокопроизводительны даже при эксплуатации в сложных условиях.

Бесщеточные двигатели обладают массой преимуществ, потому сфера их применения необычайно широка, они используются даже в космической промышленности и ракетостроении. Работающие на таких моторах механизмы с каждым днем становятся популярнее в самых разных сферах.
Превосходство бесщёточных двигателей — Greenworks Russia
- Главная
- Превосходство бесщёточных двигателей
 org/ListItem»>Обзоры
org/ListItem»>ОбзорыБесщёточные двигатели постоянного тока имеют множество преимуществ. Прежде всего, в них меньше изнашивающихся или ломающихся деталей, чем в двигателе с щетками. Поэтому он надёжнее, дешевле в обслуживании и требуют меньше или вовсе не требуют технического обслуживания.
Устройство практически не нагревается, что увеличивает его производительность. Бесщёточные моторы обладают КПД до 90%, щеточные — до 70%, а бензиновые — порядка 15% (остальная энергия тратится на нагрев). Нет трения — нет потери мощности, которая сопоставима с мощностью бензинового двигателя. Трение отсутствует, температурных перепадов мало — практически полное отсутствие износа продлевает жизнь мотора. Это снижает стоимость обслуживания и увеличивает срок жизни инструмента.
Бесщеточные моторы работают очень тихо. Использовать такую технику комфортно, а соседям при этом спокойно.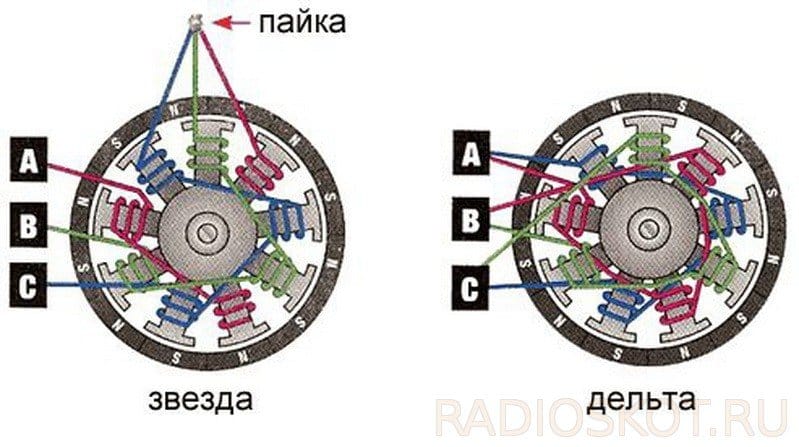 Высокоэффективное использование энергии позволяет устройству дольше работать от аккумулятора, чем его аналогу со щеточным двигателем. Реже требуется зарядка, что сэкономит вам время и электроэнергию.
Высокоэффективное использование энергии позволяет устройству дольше работать от аккумулятора, чем его аналогу со щеточным двигателем. Реже требуется зарядка, что сэкономит вам время и электроэнергию.
Преимущества бесщёточного двигателя:
- Бесщёточный двигатель может в считанные секунды развить максимальную скорость оборотов за счёт своего строения.
- Невысокая температура гарантирует длительность работы подшипника вентилятора.
- Главным преимуществом является, что у бесщёточных двигателей отсутствует искрообразование. Это позволяет использовать его в работе с летучими химическими составами, пылью, грязью и водой.
- Большим и главным плюсом является бесшумная работа двигателя. Поэтому его стараются использовать в разных устройствах.
- Отсутствие щеточно-коллекторного узла продлевает срок службы устройства.

|
|
|
|
|
БЕЗ ТЕХОБСЛУЖИВАНИЯ |
БОЛЬШОЙ КРУТЯЩИЙ МОМЕНТ |
БОЛЬШЕ СКОРОСТИ |
|
Бесщёточный двигатель не требует или почти не требует техобслуживания |
Нет выхлопных газов, нет токсичных выбросов |
Без щёток — меньше трения, двигатель вращается быстрее |
|
|
|
|
|
МЕНЬШЕ НАГРЕВ |
БЕЗ ИСКРЕНИЯ |
КОМПАКТНЫЙ ДИЗАЙН |
|
Нет щёток — значит нет трения, т. |
Благодаря отсутствию трения скорость и крутящий момент ещё больше |
Бесщёточные двигатели более компакты |

Наши специалисты ответят на любой интересующий вопрос
Задать вопрос
По наименованию (А-Я)По наименованию (Я-А)По популярности (возрастание)По популярности (убывание)
Новинка
Триммер Greenworks 82V (45 см) бесщеточный аккумуляторный без АКБ и ЗУ, арт. 2110707
Ожидается Арт. 2110707
34990 ₽
Триммер Greenworks 82V (40 см) бесщеточный аккумуляторный с 2 Ач АКБ и ЗУ, арт. 2110607UA
Ожидается
Арт. 2110607UA
2110607UA
45490 ₽
Новинка
Вибрационная шлифмашина Greenworks G24SS14 24V аккумуляторная без АКБ и ЗУ, арт. 3100507
В наличии Арт. 3100507
4990 ₽
Преимущества бесколлекторных двигателей перед коллекторными: тихая работа, менее подвержены перегреву, отсутствие искрообразования, долгий срок службы.
Поделиться
Назад к списку
Бесщеточный двигатель принцип работы
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле. В настоящее время существует несколько типов устройств, имеющих различные характеристики.
- Использование
- Описание и принцип работы
- Принцип работы БДКП
- Как работает коллекторная машина
- Как осуществляется управление
- Трехфазные бесколлекторные электродвигатели
- Преимущества использования
С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере.
Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.
Использование
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт.
В более мощной аппаратуре их применение нерационально.
Магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям.
Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе.
Описание и принцип работы
Бесщеточный (бесколлекторный) двигатель постоянного тока очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора.
Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей.
Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Появление процессорной техники и силовых транзисторов позволило конструкторам отказаться от узла механической коммутации и изменить роль ротора и статора в электромоторе постоянного тока.
Принцип работы БДКП
В бесколлекторном электродвигателе роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП — его обмотки расположены на статоре, что исключает необходимость в коллекторе.
Иными словами, основное принципиальное различие между классическим двигателем и БДКП в том, что вместо стационарных магнитов и вращающихся катушек последний состоит из неподвижных обмоток и вращающихся магнитов. Несмотря на то что сама коммутация в нём происходит похожим образом, её физическая реализация в бесщёточных приводах гораздо более сложна.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение.
Оно генерируется в катушках статора, не подключенных на данный момент времени.
Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током.
Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи.
Они позволяют из постоянного напряжения сделать трехфазные импульсы.
Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
 Коммутация обмотки «В» не претерпевает изменений.
Коммутация обмотки «В» не претерпевает изменений.И после этого происходит повтор всего цикла.
Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы.
Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.

Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 5 чел.
Средний рейтинг: 2.6 из 5.
Бесщеточный двигатель постоянного тока Состав и принцип работы Объяснить
Двигатель постоянного тока в основном имеет щеточный двигатель постоянного тока идвигатель БесщеточныйДва вида, особеннодвигатель БесщеточныйОн широко используется в промышленном производстве и повседневной жизни в его выдающихся рабочих характеристиках. В работе вводится состав и принцип работы бесщеточного двигателя постоянного тока.
В работе вводится состав и принцип работы бесщеточного двигателя постоянного тока.
одинБесщеточный двигатель постоянного тока Введение
Бесщеточный двигатель постоянного тока (BLDC) заменяет механический коммутатор с электронным коммутатором, так бесщеточный двигатель постоянного тока имеет как двигатель хорошую производительность управления скоростью постоянного тока, а также имеет простую структуру , двигатель переменного тока, без огня, надежное и легкое обслуживание и другие преимущества.
Рисунок 1, бесщеточный двигатель постоянного тока Модель
Электродвигатель постоянного тока бесщеточный в основном состоит из ротора, изготовленного с помощью постоянного магнитного материала, статор и датчик положения (возможность без) с катушкой обмотки. Видимый, это иОКРУГ КОЛУМБИЯЕсть много общих точек, структура статора и ротор аналогично (оригинал статор становится ротором, ротор становится статором), и проводка обмоток в основном то же самое. Тем не менее, существует значительная разница в структурах: бесщеточный двигатель постоянного тока не имеет коммутатор и щетки в двигатель постоянного тока, заменены датчиком положения. Таким образом, структура двигателя является относительно простой, снижает производственные и расходы на техническое обслуживание двигателя, но бесщеточный двигатель постоянного ток не может автоматически обратную (фаза), стоимость жертвы является улучшением стоимости контроллера двигателя (например, трехфазный двигатель постоянного тока, есть привод моста щетки двигателя постоянного тока требует 4 ламп мощности, а 6 силовых трубок требуется для приведения в действие моста бесщеточного электродвигателя постоянного тока.
Тем не менее, существует значительная разница в структурах: бесщеточный двигатель постоянного тока не имеет коммутатор и щетки в двигатель постоянного тока, заменены датчиком положения. Таким образом, структура двигателя является относительно простой, снижает производственные и расходы на техническое обслуживание двигателя, но бесщеточный двигатель постоянного ток не может автоматически обратную (фаза), стоимость жертвы является улучшением стоимости контроллера двигателя (например, трехфазный двигатель постоянного тока, есть привод моста щетки двигателя постоянного тока требует 4 ламп мощности, а 6 силовых трубок требуется для приведения в действие моста бесщеточного электродвигателя постоянного тока.
На рисунке 1 показана небольшая мощность трехфазного, соединение звездой, бесщеточный двигатель постоянного тока с одним параллельно свободным, и его статора, ротор снаружи. Другая конфигурация мотора бесщеточного DC только была отменена, и его статор снаружи, ротор, то есть статор является основой катушки обмотки, а ротор изготовлен с помощью магнитного материала постоянная.
Бесщеточный двигатель постоянного тока имеет следующие характеристики:
● Внешний характер бесщеточный DC выходной двигатель может большой крутящий момент на низкой скорости, так что она может обеспечить большой пусковой момент;
● Диапазон скорости бесщеточный двигатель постоянного тока широко, и он может работать всю скорость на любой скорости;
● Высокая эффективность бесщеточных двигателей постоянного тока, сильной перегрузочная способность, делает его производительностью хорошо в системе сопротивления;
● Воспроизведение тормозного эффекта бесщеточный двигатель постоянного тока хорошо, потому что его ротор с постоянным магнитом материала, двигатель может войти в состояние генератора при торможении;
● Бесщеточный мотор постоянного тока мала плотность мощности высока;
● двигатель Бесщеточный без механического коммутатора, используя полностью закрытую структуру, может предотвратить попадание пыли в двигатель внутри, надежность;
● двигатель Бесщеточного проще, чем контроль вождения асинхронных двигателей.
дваПринцип работы бесщеточного двигателя постоянного тока
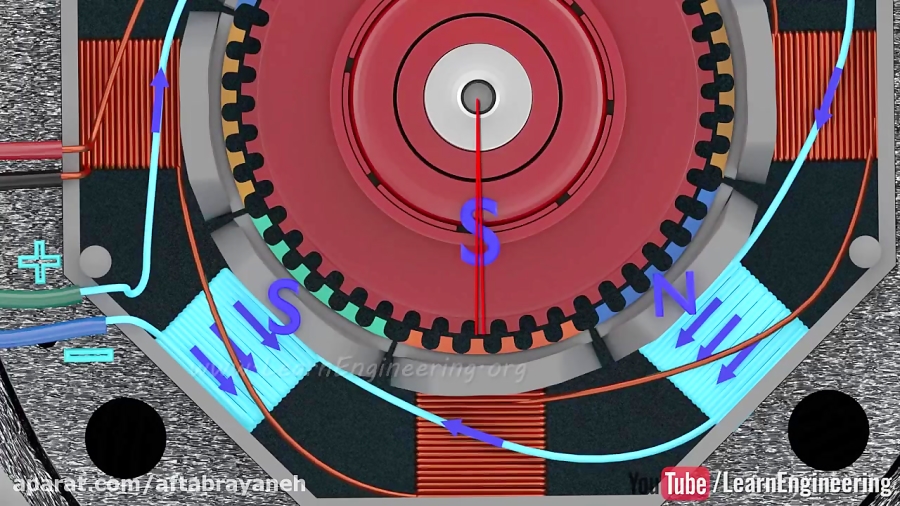
Статор бесщеточный двигатель постоянного тока катушки обмотки якоря, а ротор с постоянным магнитом. Если только электрическая машина фиксируется при токе фиксированного постоянного тока, двигатель может генерировать только постоянное магнитное поле, двигатель не может вращаться, только положение ротора двигателя обнаруживается в режиме реального времени, а затем в соответствии с различными связи из двигатель в соответствии с положением ротора, вращающееся магнитное поле однородного изменения в статоре генерируется, и двигатель может быть повернут с последующим магнитным полем.
Как показано на фиг. 2, принцип вращения двигателя бесщеточный постоянного тока схематически показано на чертеже, для удобства описания, катушка центральный отвод из статора двигателя, источник питания питания, разъем конечной точки, датчик положения, чтобы включить Г полюс 1 мощность трубки, мощность трубка включена, и соответствующая фазовая катушка питается.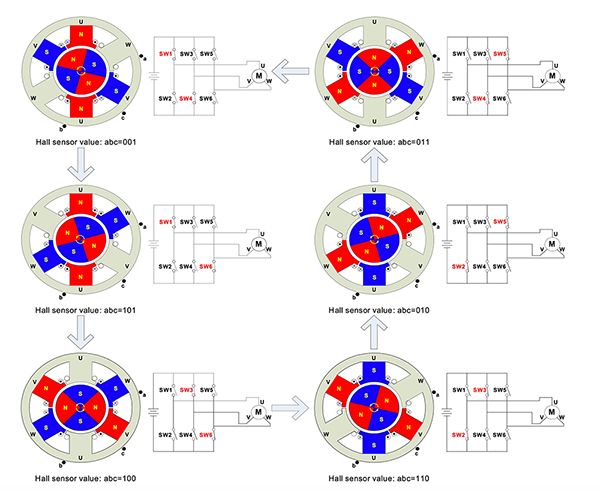 Поскольку три датчика положения включены с вращением ротора, соответствующие фазовые обмотки , также под напряжением, так что направление магнитного поля статора постоянно изменяется, ротор двигателя также вращается, что базовое вращение бесщеточного двигателя постоянного тока принцип — определения положения ротора, последовательно подают каждую фазу, чтобы направление магнитного поля, генерируемого статор равномерно изменяются.
Поскольку три датчика положения включены с вращением ротора, соответствующие фазовые обмотки , также под напряжением, так что направление магнитного поля статора постоянно изменяется, ротор двигателя также вращается, что базовое вращение бесщеточного двигателя постоянного тока принцип — определения положения ротора, последовательно подают каждую фазу, чтобы направление магнитного поля, генерируемого статор равномерно изменяются.
Рисунок 2: Принципиальная схема принципа вращения бесщеточного двигателя постоянного тока
триМетод привода двигателя Бесщеточный
Способ приведения в действие бесщеточным прямого двигателя можно разделить на несколько водителей в разных категориях, и они имеют свои особенности.
Пресс колебательный сигнал:
● Квадратный приводной волны, этот метод вождения удобен, легко не достичь никакого контроля датчика положения двигателя;
● Синусоидальный привод, этот способ вождения может улучшить операционную двигателя эффект, таким образом, что выходной крутящий момент является однородным, но процесс реализации является относительно сложным.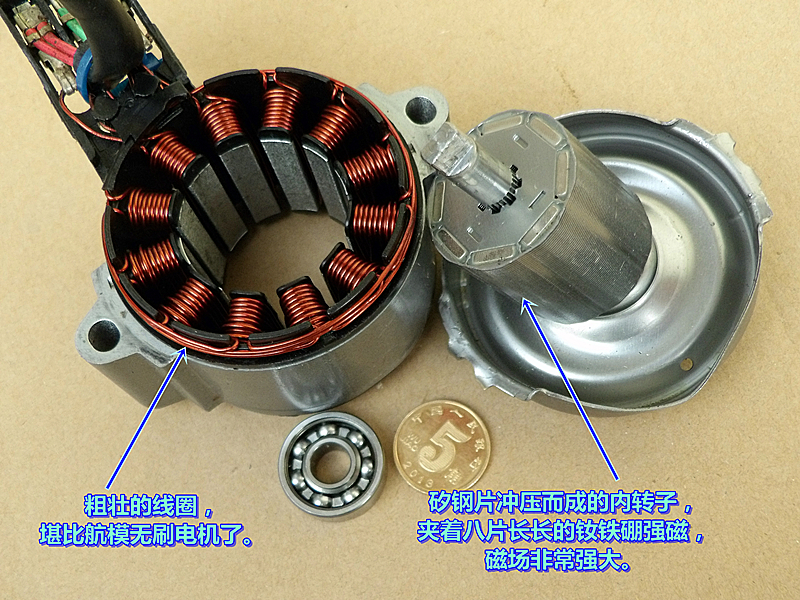 В то же время, этот методSPWM с участиемSVPWM(Space Vector PWM) два способа, эффект SVPWM лучше SPWM.
В то же время, этот методSPWM с участиемSVPWM(Space Vector PWM) два способа, эффект SVPWM лучше SPWM.
В чем разница между щеточными и бесщеточными двигателями? — Worx Tools Russia
Все чаще на просторах интернет-магазинов можно найти инструменты с двумя типами двигателей. Инструменты и садовая техника WORX также не отстают от современных трендов при производстве техники, так что на нашем сайте вы тоже можете найти специальную характеристику двигателя — щеточный или бесщеточный. Так что же это за характеристика, на что она влияет и в чем принципиальные отличия инструментов с тем или иным двигателем? Давайте разбираться.
Устройство и принцип действия щеточного двигателя
Щеточный двигатель по-другому еще называется коллекторным. Состоит двигатель из нескольких важных частей.
Ротор — по-другому, якорь. Как раз он вращается внутри и преобразует электрическую энергию в механическую. Якорь обмотан медной проволокой (обмоткой) с разных сторон ротора. За счет прохождения тока через проволоку создается магнитное поле, которое в свою очередь и создает вращение элемента.
За счет прохождения тока через проволоку создается магнитное поле, которое в свою очередь и создает вращение элемента.
На бесщеточном двигателе установлен коммутатор, который используется для переключения с одной обмотки на другую. Это позволяет менять направление вращения ротора. Этот коммутатор и есть коллектор, от которого взял свое название двигатель.
Чтобы напряжение передалось на обмотки, а ток прошел через коллектор в двигатель устанавливаются специальные щетки. Щетки обычно состоят из графита; они всегда контактируют с коммутатором и обеспечивают подачу энергии к катушкам с обмоткой. Есть две щетки, и каждая из них подключается к противоположному полюсу батареи. Это гарантирует, что при вращении ротора ток, протекающий к катушкам, постоянно меняет направление. Это приводит к необходимому изменению магнитного поля, которое позволяет ротору продолжать вращаться.
Все вышеописанные элементы установлены в статор. Статор — неподвижных элемент двигателя, в котором могут быть либо еще одна катушка с проволокой, либо постоянный магнит. За счет того или другого элемента и создается магнитное поле обратной полярности ротору, из-за чего тот вращается.
Статор — неподвижных элемент двигателя, в котором могут быть либо еще одна катушка с проволокой, либо постоянный магнит. За счет того или другого элемента и создается магнитное поле обратной полярности ротору, из-за чего тот вращается.
Коллекторные двигатели могут работать от переменного напряжения, так как при смене полярности ток в обмотках возбуждения и якоря также меняет направление, в результате чего вращательный момент не меняет своего направления.
Плюсы и минусы щеточного двигателя
Так мы с вами вкратце разобрались с устройством щеточного двигателя. Теперь в чем же его плюсы и минусы?
Плюсы
- Первым плюсом инструментов со щеточными двигателями стоит отметить более низкую стоимость в отличие бесщеточных. Это связано с технологиями производства и более бюджетными материалами.
-
Вторым плюсом специалисты отмечают упрощенную конструкцию двигателя, что влияет на стоимость ремонта. Проще поменять щетки, чем весь мотор в целом.
- Также к плюсам можно отнести относительно малый вес и размер инструментов.
 Проще поменять щетки, чем весь мотор в целом.
Проще поменять щетки, чем весь мотор в целом.
Минусы
- На высоких оборотах увеличивается трение щёток. Отсюда вытекает проблема их быстрого износа. Помимо износа самих щеток, в процессе работы они стираются. Стертый графит может засорить коллектор и привести в полную негодность инструмент.
- Также к минусам можно отнести более низкую мощность щеточных инструментов, в отличие от бесщеточных моделей. Это связано с тем, что щеточные двигатели физически не могут выдавать мощность выше 3 000 об./мин. Но такой мощности вполне достаточно для домашнего обихода.
-
Еще одним минусом щеточных двигателей мы можем отметить наличие искрения во время работ. Обратите внимание, что при запуске инструмента щетки трутся о коллектор и создают видимые искры. Это значит, что работать щеточными инструментами нужно более аккуратно — убирать на расстояние все возможные легковоспламеняющиеся вещества и предметы, а также периодически делать перерывы в работе, во избежание перегрева двигателя.
- Последним минусом отметим не очень высокий КПД инструментов с коллекторным двигателем — всего 60%. Это значит, что инструменты несколько хуже справляются с прочными материалами (например, с металлом) и выполняют меньший объем работы за то же время, что бесщеточный инструмент.
Устройство и принцип действия бесщеточного двигателя
Теперь давайте разберем принцип работы бесщеточного двигателя. Как понятно из названия, его принципиальное отличие в отсутствии щеток. Но как же он тогда работает? Как нужная энергия поступает в двигатель?
В устройстве бесщеточного двигателя также присутствует ротор и статор — основные элементы любого мотора. Но при этом отсутствует коллектор, соответственно и двигатель по-другому называется бесколлекторным. Если у щеточного двигателя работа происходит за счет электро-механической смены полярности, то в бесщеточном двигателе все работает благодаря электромагнитной индукции. Также отличается местоположение обмотки — здесь она располагается на статоре, в отличие от предыдущего вида двигателя.
Также отличается местоположение обмотки — здесь она располагается на статоре, в отличие от предыдущего вида двигателя.
Вместо щеток и коллектора в бесщеточном двигателе установлены датчики Холла и контроллер, который контролирует подачу напряжения на катушки для создания индуктивности, а также положение ротора и скорость его вращения.
Когда плата подает на обмотку ток, создается тоже противоположное магнитное поле, и магниты на роторе начинают вращаться.
Еще одной особенностью бесщеточных двигателей нужно назвать их типы. Двигатели бывают двух типов — синхронный и асинхронный. В синхронном двигателе частота вращений ротора равна частоте вращений магнитного поля — то есть один оборот ротор совершает после одного полного прохождения тока через катушку. А в асинхронном двигателе обратная ситуация — частота вращений ротора меньше, чем частота вращения магнитного поля. То есть ток проходит через катушку быстрее.
Плюсы и минусы бесщеточного двигателя
Если с устройством бесщеточного двигателя мы разобрались, то теперь давайте рассмотрим положительные и отрицательные стороны инструментов с бесщеточными моторами.
Плюсы:
- У инструментов с бесщеточным двигателем отсутствуют многие проблемы, которые встречаются у щеточных моделей. Так, первым плюсом специалисты отмечают бо́льшую износостойкость инструментов. Ввиду отсутствия щеток не создается трение внутри двигателя, соответственно нет внутренних загрязнений. Также отсутствие щеток снижает пожароопасность инструмента — при работе нет искрения, а значит можно работать практически в любых условиях.
-
Вторым плюсом стоит отметить упрощенную регулировку крутящего момента — в отличие от щеточных моделей, у бесколлекторных инструментов достаточно просто нажать соответствующую кнопку на инструменте. Причем регулировка может иметь до 15 уровней и переключаться в одно мгновение.
- Одним из ключевых преимуществ бесщеточных моделей нужно отметить экономию расходуемой энергии. Этот пункт особенно актуален для аккумуляторных инструментов. Благодаря экономии инструменты работают до 50% дольше, чем модели со щеточным двигателем. Также КПД бесколлекторных инструментов намного выше — инструмент выполняет 90% поставленных задач, против 60% у коллекторных моделей. Это значит, что бесщеточными инструментами можно работать практически с любым материалом без потери мощности.
- Помимо вышеуказанных преимуществ инструментов с бесщеточным двигателем, они еще могут разгоняться до максимальных показателей и имеют быстрый запуск сразу с больших скоростей, чем не могут похвастаться щеточные инструменты.

Минусы:
Но не бывает все настолько радужно. Даже у инструментов с бесщеточными двигателями есть и свои недостатки. Так сказать, ложка дегтя в бочке меда.
- К минусам, в первую очередь стоит отнести стоимость инструментов. Техника с бесщеточным мотором в цене дороже, чем упрощенные модели со щеточным двигателем.
- Вторым недостатком бесколлекторных инструментов может быть сложное и дорогое техническое обслуживание. Бесщеточный двигатель — технологичное устройство, для работы с которым нужны знания в микроэлектронике. К счастью, в сотрудники наших сервисных центров знают и умеют обслуживать бесколлекторные двигатели.
Итоги сравнения щеточного и бесщеточного двигателей
Если сравнивать инструменты с разными видами двигателей, то можно смело сказать, что техника с бесщеточным двигателем надежнее и мощнее. Но нужно учитывать тот факт, что ориентирована такая техника больше на профессиональные работы. В быту же и инструменты со щеточным двигателем отлично справятся со своими задачами. Потому перед покупкой инструмента заранее определите цели, для которых вы будете использовать инструменты.
В ассортименте компании WORX есть инструменты и со щеточными и с бесщеточными двигателями. Чтобы определить какой именно тип двигателя установлен в инструменте, обратите внимание на иллюстрацию в карточке товара — в бесщеточных моделях есть специальная пометка «BRUSHLESS MOTOR».
Вернуться к списку
Трёхфазный бесколлекторный двигатель BLDC
1. Двигатель стиральной машины с прямым приводом
Пожалуй уже каждый слышал о стиральных машинах с прямым приводом барабана. Но до сих пор, даже не все специалисты по ремонту стиральных машин знают как устроен и как работает двигатель в такой машине.
Сама идея конечно не новая, ведь за основу взят шаговый двигатель, который уже давно получил распространение во многих электротехнических устройствах. А вот первое применение его в конструкции стиральной машины в качестве привода барабана, принадлежит корейскому концерну LG. С середины 2005 года, компания LG начала активно продвигать свою продукцию, заявляя о 10-ти летней гарантии на двигатель для стиральных машин с прямым приводом.
Сегодня, помимо LG, компании Samsung, Haier и Whirpool в ряде моделей стиральных машин стали применять подобные двигатели. Забегая вперёд, можно сказать, что компания LG не просчиталась и двигатель для прямого привода барабана действительно довольно надёжный и имеет преимущество по сравнению с более традиционным и распространённым коллекторным двигателем.
2. Устройство двигателя
Двигатель стиральной машины с прямым приводом, представляет собой трёхфазный бесколлекторный двигатель постоянного тока, отчасти похожий на шаговый двигатель, но это не совсем так. В иностранной литературе его ещё часто называют BLDC (Brushless Direct Current Motor — бесщёточный мотор постоянного тока), для удобства мы тоже будем применять эту аббревиатуру.
Такой двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Различают два вида подобных двигателей:
Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. В стиральных машинах с прямым приводом применяется Outrunner тип двигателя.
В стиральных машинах с прямым приводом применяется Outrunner тип двигателя.
В этой статье мы ознакомим с устройством двигателя от стиральной машины LG.
3. Ротор
Рис.2 Ротор двигателя стиральной машины LG с прямым приводом
Ротор BLDC — вращающаяся часть двигателя (Рис.2) По форме напоминает чашу, к внутренней стороне которой специальным клеем крепятся магниты прямоугольной формы. Магниты всегда имеют чётное количество и установлены с чередованием полюсов. В нашем случае установлено 12 магнитов, размер которых зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. В центре ротора есть специальное посадочное отверстие с насечками, что позволяет, при помощи болта или гайки, закрепить ротор напрямую к валу барабана. С внешней стороны ротора, продавлено 10 щелей образующих на обратной его стороне небольшие лопасти для охлаждения обмоток статора.
4. Статор
Рис.3 Статор двигателя стиральной машины LG с прямым приводом
Статор BLDC — неподвижная часть двигателя и крепится к задней части бака стиральной машины (Рис.3) Статор состоит из нескольких листов магнитопроводящей стали заключённый в пластиковый каркас, который служит изолятором. В целом, каркас статора напоминает круг с прямоугольными зубьями. На каждый зуб статора наматывается катушка.
Обмотка трёхфазного бесколлекторного двигателя изготовлена из медной проволоки толщиной 1 мм. Классическая обмотка выполняется одним проводом для одной фазы, то есть все обмотки на зубьях одной фазы соединены последовательно. В данном случае статор имеет 36 зубьев — это значит по 12 зубьев на одну фазу. Сопротивление обмотки каждой фазы порядка 10 Ом.
Как известно, в трёхфазных двигателях, обмотки соединяют по схеме звезда или треугольник.
В нашем случае, обмотки статора соединены по схеме звезда, т. е. концы фаз имеют общую точку (Рис.4)
е. концы фаз имеют общую точку (Рис.4)
Поскольку в каждый момент времени работают только две фазы (при включении звездой), магнитные силы воздействуют на ротор неравномерно по всей окружности (Рис.5).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее (Рис.6)
|
Рис.4 Соединение обмоток по схеме «звезда» |
Рис.5 Воздействие магнитных сил на ротор |
Рис.6 Распределение магнитных сил в обмотке с несколькими зубьями |
В двигателе стиральной машины LG, распределение фазных обмоток, а также относительное положение ротора и статора можно увидеть ниже (см. Рис.7). На схеме производителя, фазные обмотки обозначают буквами : V, W, U
Рис.7). На схеме производителя, фазные обмотки обозначают буквами : V, W, U
Рис.7 Трёхфазный двигатель постоянного тока (BLDC) стиральной машины LG (общий вид)
Для контроля положения ротора применяется датчик работающий на эффекте Холла. Датчик реагирует на магнитное поле и поэтому его располагают на статоре таким образом, чтобы магниты ротора воздействовали на него.
5. Система управления трёхфазным двигателем (BLDC)
Стоит отметить, что система управления двигателем BLDC и схема её реализации аналогична схеме управления трёхфазным асинхронным двигателем описанной в другой нашей статье. Что бы в точности не повторяться, поясним всё же немного по другому.
Управление двигателем с прямым приводом построено на инверторе напряжения с широтно-импульсной модуляцией. Инвертор — (от лат. inverto — поворачивать, переворачивать) — элемент вычислительной схемы, осуществляющий определённые преобразования сигнала изменяемой амплитуды и частоты. К примеру, в инверторе, сетевое напряжение 220 вольт с частотой 50 Гц, преобразуется в постоянное напряжение, а параметры питания обмоток статора двигателя могут колебаться от 0 до 120 вольт с частотой до 300 Гц.
К примеру, в инверторе, сетевое напряжение 220 вольт с частотой 50 Гц, преобразуется в постоянное напряжение, а параметры питания обмоток статора двигателя могут колебаться от 0 до 120 вольт с частотой до 300 Гц.
Двигатель постоянного тока имеет три вывода (т.е. три фазы), на которые в разный момент времени подаётся «+» и «-» питания. Это реализуется при помощи IGBT (биполярных транзисторов с изолированным затвором) представляющие электронные силовые ключи, включённые по мостовой схеме (Рис.8)
Рис.8 Условная схема силовой части инвертора и обмоток двигателя подключённых по схеме «звезда»
Замыкая ключ SW1 подаётся «+» на фазу V, а замыкая SW6 подаётся «-» на фазу U. Таким образом, ток потечет от «+» выпрямителя через фазы V и U. Для обеспечения обратного направления, открывается SW5 и SW2. В этом случае ток потечет от «+» выпрямителя через фазы U и V в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний и один нижний ключ.
При работе двигателя одновременно должен быть открыт только один верхний и один нижний ключ.
При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем, нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ).
Дадим определение этим терминам:
Широтно-импульсная модуляция (ШИМ) — это управление средним значением напряжения на нагрузке путём изменения скважности импульсов, управляющих ключом. А скважность — это отношение периода следования (повторения) сигнала к длительности (широте) его импульса.
На (Рис.9) представлен график, иллюстрирующий применение трёхуровневой ШИМ для управления электродвигателем, которая используется в приводах асинхронных электродвигателей с переменной частотой. Напряжение от ШИ-модулятора, подаваемое на обмотку двигателя показано в виде прямоугольных импульсов. Пунктирной линией грубо изображён магнитный поток в статоре двигателя. Магнитный поток имеет приблизительно синусоидальную форму, благодаря соответствующему закону ШИМ.
Пунктирной линией грубо изображён магнитный поток в статоре двигателя. Магнитный поток имеет приблизительно синусоидальную форму, благодаря соответствующему закону ШИМ.
Поэтому, ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью. Таким образом, изменяется действующее напряжение от нулевого до напряжения питания.
Назревает вопрос: зачем нужно менять скважность, зачем эта частота и для чего это всё нужно? Дело в том, что слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования оборотов двигателя.
Рис.9 График иллюстрирующий напряжение от ШИ-модулятора, подаваемое на обмотку двигателя.
Например: если ротор двигателя имеет два полюса, то при одном полном обороте магнитного поля на статоре, ротор совершает один полный реальный оборот.
При 4 полюсах, чтобы повернуть вал двигателя на один полный оборот потребуется два оборота магнитного поля на статоре.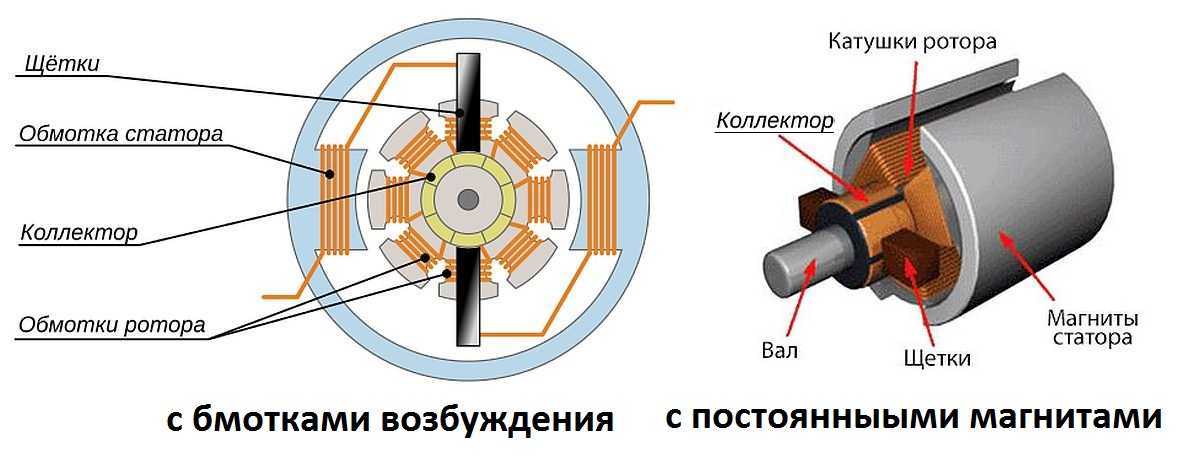 Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот.
Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот.
В нашем случае, имеется 12 магнитов на роторе. Для того, чтобы провернуть ротор на один оборот, потребуется 12/2=6 электрических оборотов поля. Поэтому, учитывая особенность конструкции двигателя и инверторную систему управления, для питания фаз двигателя необходима электрическая частота значительно выше 50Гц.
Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ, на сигналы, подаваемые на ключи. Для этого, микроконтроллер электронного блока управления, программно формирует ШИМ для каждого из ключей (IGBT). В программу контроллера, производитель закладывает определённый алгоритм и все данные для управления конкретным двигателем.
Мы пояснили немного суть системы управления двигателем, а вот детальный обзор устройства и принцип работы инверторного блока управления — очень объёмный материал и в рамках данной статьи мы рассматривать не будем.
6. Неисправности и диагностика двигателя
Как и говорилось выше, сам по себе двигатель довольно надёжный, относительно простой и в практике известны единичные случаи выхода из строя обмоток статора. Магниты на статоре имеют конечно не самое высшее качество, но их отклеивание или расколы почти не встречались.
Уязвимая деталь, пожалуй только датчик Холла. При возникновении его неисправности, отсутствует сигнал положения ротора, что приводит к некорректной работе системы питания фаз двигателя. В этом случае можно наблюдать, как ротор двигателя стопорится и издаёт дребезжащий металлический звук. В стиральных машинах LG, эта проблема зачастую сопровождается кодом неисправности «SE» на модуле интерфейса.
В отличие от коллекторного двигателя, запустить и проверить трёхфазный двигатель напрямую вне стиральной машины без каких-либо специальных приспособлений не получится, поскольку статор крепится к баку, а ротор к валу барабана стиральной машины. Поэтому, при наличии обычного цифрового мультиметра, можно проверить только сопротивление обмоток фаз статора. В связи с этим, на практике, при диагностировании неисправности, проблемную деталь двигателя или модуль управления, выявляют путём замены детали на заведомо исправную.
В связи с этим, на практике, при диагностировании неисправности, проблемную деталь двигателя или модуль управления, выявляют путём замены детали на заведомо исправную.
7. Преимущества и недостатки BLDC двигателей
Более ярким получится сравнение трёхфазного двигателя (BLDC) с традиционным коллекторным двигателем, которым оснащено большинство стиральных машин.
К преимуществу двигателей BLDC стоит отнести:
- низкий уровень шума
- относительно простая конструкция
- особое позиционирование двигателя в стиральной машине, позволяющее снизить колебание бака
- отсутствие приводного ремня, из-за которого терялась часть полезной энергии двигателя на преодоление сил трения ремня, между шкивом двигателя и шкивом барабана
- отсутствие уязвимого коллекторно-щёточного узла, имеющего ограниченный ресурс и требующего обслуживания
К недостаткам двигателя BLDC относятся:
- достаточно сложная система управления ( по сравнению с коллекторным двигателем)
Справедливости ради, стоит отметить, что двигатель стиральной машины LG с прямым приводом не идеально бесшумный. В момент пуска двигателя, из-за взаимодействия магнитных полей статора с магнитами ротора, возникают колебания последнего, сопровождающиеся характерным металлическим звоном. По мере увеличения оборотов ротора, звук становится более мягким, но всё-равно своеобразным и характерным для всех стиральных машин LG с прямым приводом барабана.
В момент пуска двигателя, из-за взаимодействия магнитных полей статора с магнитами ротора, возникают колебания последнего, сопровождающиеся характерным металлическим звоном. По мере увеличения оборотов ротора, звук становится более мягким, но всё-равно своеобразным и характерным для всех стиральных машин LG с прямым приводом барабана.
Статья подготовлена интернет-магазином A-qualux.ru
Основы бесщеточных двигателей постоянного тока (BLDC Motors)
В этом уроке мы узнаем о бесщеточных двигателях, также известных как бесщеточные двигатели постоянного тока или двигатели BLDC. Мы увидим, что такое двигатель BLDC, принцип его работы, как правильно управлять бесколлекторным двигателем постоянного тока, а также несколько приложений.
[адсенс1]
Краткое описание
Введение
Бесколлекторные двигатели постоянного тока или бесщеточные двигатели постоянного тока внесли значительный вклад в развитие современной приводной техники. Их быстрый рост популярности привел к расширению спектра применения в области бытовой техники, автомобильной промышленности, промышленной автоматизации, химической и медицинской, аэрокосмической и приборостроительной промышленности.
Их быстрый рост популярности привел к расширению спектра применения в области бытовой техники, автомобильной промышленности, промышленной автоматизации, химической и медицинской, аэрокосмической и приборостроительной промышленности.
Несмотря на то, что они долгое время использовались для приводов и производства электроэнергии, субкиловаттный диапазон, в котором преобладали щеточные двигатели постоянного тока, всегда был серой зоной. Но современная силовая электроника и микропроцессорная технология позволили небольшим бесщеточным двигателям постоянного тока процветать как с точки зрения цены, так и с точки зрения производительности.
[адсенс2]
Что такое двигатель BLDC?
Бесщеточный двигатель постоянного тока аналогичен щеточному двигателю постоянного тока, но, как следует из названия, в бесщеточном двигателе постоянного тока не используются щетки для коммутации, а они коммутируются электронным способом. В обычных щеточных двигателях постоянного тока щетки используются для передачи мощности на ротор, когда они вращаются в фиксированном магнитном поле.
Как упоминалось ранее, двигатель BLDC использует электронную коммутацию и, таким образом, устраняет необходимость в механически рвущихся щетках.
Конструкция бесщеточного двигателя постоянного тока
Основное конструктивное различие между щеточными и бесщеточными двигателями заключается в замене механического коммутатора электрической цепью переключателя. Имея это в виду, двигатель BLDC является типом синхронного двигателя в том смысле, что магнитное поле, создаваемое статором и ротором, вращается с одинаковой частотой.
Бесколлекторные двигатели доступны в трех конфигурациях: однофазные, двухфазные и трехфазные. Из них трехфазный BLDC является наиболее распространенным.
На следующем изображении показано поперечное сечение двигателя BLDC.
Как вы можете видеть на изображении, BLDC Motor состоит из двух основных частей: статора и ротора.
Статор
Структура статора BLDC Motor аналогична конструкции асинхронного двигателя. Он состоит из штабелированных стальных пластин с аксиально прорезанными пазами для намотки. Обмотка BLDC немного отличается от обмотки традиционного асинхронного двигателя.
Он состоит из штабелированных стальных пластин с аксиально прорезанными пазами для намотки. Обмотка BLDC немного отличается от обмотки традиционного асинхронного двигателя.
Как правило, большинство двигателей BLDC состоят из трех обмоток статора, соединенных звездой или звездой (без нейтральной точки). Кроме того, в зависимости от соединений катушек обмотки статора подразделяются на трапециевидные и синусоидальные двигатели.
В трапециевидном двигателе как управляющий ток, так и противо-ЭДС имеют форму трапеции (синусоидальная форма в случае синусоидальных двигателей). Обычно двигатели с номинальным напряжением 48 В (или менее) используются в автомобилестроении и робототехнике (гибридные автомобили и роботизированные руки).
Ротор
Роторная часть двигателя BLDC состоит из постоянных магнитов (обычно магнитов из редкоземельных сплавов, таких как неодим (Nd), самарий-кобальт (SmCo) и сплав неодима, феррита и бора (NdFeB)).
В зависимости от применения количество полюсов может варьироваться от двух до восьми, при этом северный (N) и южный (S) полюса размещаются попеременно. На следующем изображении показаны три различных расположения полюсов. В первом случае магниты размещены на внешней периферии ротора.
На следующем изображении показаны три различных расположения полюсов. В первом случае магниты размещены на внешней периферии ротора.
Вторая конфигурация называется ротором с магнитными вставками, где прямоугольные постоянные магниты встроены в сердечник ротора. В третьем случае магниты вставлены в железный сердечник ротора.
Датчики положения (датчики Холла)
Поскольку в бесщеточном двигателе постоянного тока нет щеток, коммутация управляется электронным способом. Чтобы вращать двигатель, обмотки статора должны быть запитаны в определенной последовательности, и положение ротора (то есть северный и южный полюса ротора) должно быть известно, чтобы точно подать питание на определенный набор обмоток статора.
Датчик положения, который обычно представляет собой датчик Холла (работающий по принципу эффекта Холла), обычно используется для определения положения ротора и преобразования его в электрический сигнал. В большинстве двигателей BLDC используются три датчика Холла, встроенные в статор, для определения положения ротора.
Выходной сигнал датчика Холла будет ВЫСОКИМ или НИЗКИМ в зависимости от того, проходит ли рядом с ним северный или южный полюс ротора. Комбинируя результаты трех датчиков, можно определить точную последовательность подачи питания.
Читать о КАК ИСПОЛЬЗОВАТЬ ДАТЧИК ХОЛЛА С ARDUINO?
Принцип работы
Рассмотрим следующую установку трех обмоток в статоре, обозначенных A, B и C. Для понимания заменим ротор одним магнитом.
Мы знаем, что когда ток проходит через катушку, создается магнитное поле, и ориентация силовых линий, т. е. полюсов генерируемого магнита, будет зависеть от направления тока, протекающего через катушку.
Используя этот принцип, если мы подаем ток на катушку A, чтобы она создавала магнитное поле и притягивала магнит ротора. Положение магнита ротора немного сдвинется по часовой стрелке и выровняется с A.
Если теперь мы пропустим ток через катушки B и C одну за другой (в таком порядке), магнит ротора будет вращаться по часовой стрелке.
Для повышения эффективности мы можем намотать противоположные катушки, используя одну катушку, чтобы получить двойное притяжение. Еще больше повышая эффективность, мы можем запитать две катушки одновременно, чтобы одна катушка притягивала магнит, а другая катушка отталкивала его. В это время третий будет простаивать.
Для полного оборота магнита ротора на 360 0 применимы шесть возможных комбинаций катушек A, B и C, которые показаны на следующей временной диаграмме.
Основываясь на приведенной выше диаграмме, мы можем подтвердить, что в любое время одна фаза положительная, одна фаза отрицательная, а третья фаза простаивает (или плавает). Итак, на основе входных сигналов от датчиков Холла у нас есть два переключателя фаз в соответствии с приведенной выше схемой.
Управление бесщеточными двигателями постоянного тока
Если статор и ротор являются неотъемлемыми частями двигателя BLDC, которые являются его неотъемлемой частью, то приводная электроника не менее важна. Блок-схема типичной системы управления бесщеточным двигателем постоянного тока или системы привода показана на следующем рисунке.
Блок-схема типичной системы управления бесщеточным двигателем постоянного тока или системы привода показана на следующем рисунке.
Эта схема привода часто известна как система электронного регулятора скорости или просто ESC. Одна из распространенных настроек называется схемой полного моста. Он состоит из микроконтроллера с выходами PWM, шести МОП-транзисторов для трех фаз обмоток статора, обратной связи от датчиков Холла и некоторых компонентов, связанных с питанием.
MCU можно запрограммировать на соответствующее переключение МОП-транзисторов на основе данных от датчиков Холла.
Преимущества двигателей BLDC
Поскольку двигатели BLDC имеют электронную коммутацию, у них есть несколько преимуществ по сравнению с традиционными щеточными двигателями постоянного тока. Некоторые из них:
- Без износа (из-за отсутствия щеток)
- Высокая эффективность
- Лучшее соотношение скорости и крутящего момента
- Долгий срок службы
- Меньше шума или бесшумная работа
- Значительно более высокие обороты
Применение бесщеточных двигателей постоянного тока
Ниже перечислены некоторые области применения бесщеточных двигателей постоянного тока:
- Односкоростные приложения
- Применения с регулируемой скоростью
- Управление положением
- Применение с низким уровнем шума
- Высокоскоростные приложения
Как работают бесщеточный двигатель и ESC
В этом уроке мы узнаем, как работают бесщеточный двигатель и ESC.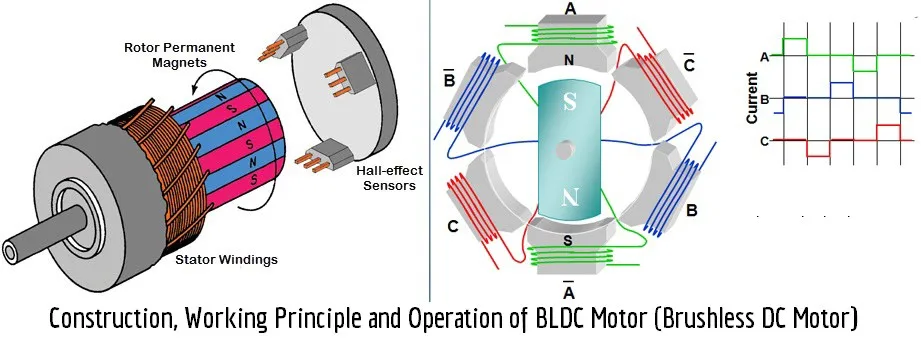 Эта статья является первой частью следующего видео, где мы изучим принцип работы бесколлекторного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части мы узнаем, как управлять бесщеточным двигателем постоянного тока с помощью Arduino.
Эта статья является первой частью следующего видео, где мы изучим принцип работы бесколлекторного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части мы узнаем, как управлять бесщеточным двигателем постоянного тока с помощью Arduino.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Как это работает
BLDC двигатель состоит из двух основных частей, статора и ротора. Для этой иллюстрации ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
Все мы знаем, что если подать ток через катушку, она создаст магнитное поле, а линии или полюса магнитного поля зависят от направления тока.
Итак, если мы применим соответствующий ток, катушка создаст магнитное поле, которое будет притягивать постоянный магнит ротора. Теперь, если мы активируем каждую катушку одну за другой, ротор будет продолжать вращаться из-за силового взаимодействия между перманентом и электромагнитом.
Чтобы повысить КПД двигателя, мы можем намотать две противоположные катушки как одну катушку таким образом, чтобы полюса были противоположны полюсам ротора, таким образом, мы получим двойную силу притяжения.
С помощью этой конфигурации мы можем создать шесть полюсов на статоре всего с тремя катушками или фазой. Мы можем еще больше повысить эффективность, подав питание на две катушки одновременно. Таким образом, одна катушка будет притягивать, а другая — отталкивать ротор.
Для того, чтобы ротор совершил полный цикл на 360 градусов, необходимо шесть шагов или интервалов.
Если мы посмотрим на форму волны тока, то увидим, что в каждом интервале есть одна фаза с положительным током, одна фаза с отрицательным током, а третья фаза отключена. Это наводит на мысль, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и, таким образом, мы можем разделить ток между ними или использовать один ток для питания двух фаз одновременно.
Вот пример. Если мы подтянем фазу A High или подключим ее к положительному постоянному напряжению с помощью какого-либо переключателя, например MOSFET, а с другой стороны соединим фазу B с землей, то ток будет течь от VCC через фазу А, нейтральную точку и фазу В, на землю. Итак, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
Если мы подтянем фазу A High или подключим ее к положительному постоянному напряжению с помощью какого-либо переключателя, например MOSFET, а с другой стороны соединим фазу B с землей, то ток будет течь от VCC через фазу А, нейтральную точку и фазу В, на землю. Итак, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
В этой конфигурации у нас фактически есть соединение фаз двигателя звездой, где нейтральная точка соединена внутри, а остальные три конца фаз выходят из двигателя, поэтому из бесщеточного двигателя выходят три провода.
Итак, для того, чтобы ротор прошел полный цикл, нам просто нужно активировать правильные два полевых МОП-транзистора в каждом из 6 интервалов, и для этого на самом деле все ESC.
Как работает ESC (электронный регулятор скорости)
ESC или электронный регулятор скорости управляет движением или скоростью бесколлекторного двигателя, активируя соответствующие МОП-транзисторы для создания вращающегося магнитного поля, заставляющего двигатель вращаться. Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Однако возникает важный вопрос: как узнать, когда какую фазу активировать. Ответ заключается в том, что нам нужно знать положение ротора, и есть два распространенных метода, используемых для определения положения ротора.
Первый распространенный метод заключается в использовании датчиков Холла, встроенных в статор, расположенных под углом 120 или 60 градусов друг к другу.
Когда постоянные магниты ротора вращаются, датчики Холла воспринимают магнитное поле и генерируют логический «высокий» для одного магнитного полюса или логический «низкий» для противоположного полюса. В соответствии с этой информацией ESC знает, когда активировать следующую коммутационную последовательность или интервал.
Второй распространенный метод, используемый для определения положения ротора, заключается в измерении обратной электродвижущей силы или обратной ЭДС. Обратная ЭДС возникает в результате прямо противоположного процесса генерации магнитного поля или когда движущееся или изменяющееся магнитное поле проходит через катушку, оно индуцирует ток в катушке.
Таким образом, когда движущееся магнитное поле ротора проходит через свободную катушку или ту, которая не активна, оно индуцирует ток в катушке, и в результате в этой катушке возникает падение напряжения. ESC фиксирует эти падения напряжения по мере их возникновения и на их основе прогнозирует или рассчитывает, когда должен произойти следующий интервал.
Таков основной принцип работы бесколлекторных двигателей постоянного тока и регуляторов скорости, и он останется тем же, даже если мы увеличим количество полюсов как ротора, так и статора. У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы совершить полный цикл.
Здесь мы также можем упомянуть, что двигатели BLDC могут быть инраннерами или аутраннерами. Бесщеточный двигатель с внутренним ротором имеет постоянные магниты внутри электромагнитов, и наоборот, двигатель с наружным ротором имеет постоянные магниты снаружи электромагнитов. Опять же, они используют один и тот же принцип работы, и каждый из них имеет свои сильные и слабые стороны.
Хорошо, достаточно теории, а теперь давайте продемонстрируем и посмотрим на жизнь то, что мы объяснили выше. Для этого мы подключим три фазы бесщеточного двигателя к осциллографу. Я подключил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Первое, что мы можем заметить, это три синусоиды. Эти синусоидальные волны на самом деле являются обратными EFM, генерируемыми в фазах, когда они не активны.
Мы видим, что при изменении оборотов двигателя частота синусоидальных волн меняется, а также их амплитуда. Чем выше число оборотов, тем выше частота и амплитуда синусоидальных волн противоЭДС. Однако то, что приводит в движение двигатель, на самом деле эти пики, которые являются активными фазами, которые генерируют изменяющееся магнитное поле.
Мы можем заметить, что на каждом интервале есть две активные и одна неактивная фаза. Например, здесь у нас активны фазы A и B, а фаза C неактивна. Затем у нас активны фазы A и C, а фаза B неактивна и так далее.
Затем у нас активны фазы A и C, а фаза B неактивна и так далее.
Здесь я хотел бы поблагодарить Banggood.com за предоставление мне этого осциллографа. Это Rigol DS1054Z, и это один из лучших осциллографов начального уровня в своей ценовой категории. Он имеет четыре входных канала, полосу пропускания 50 МГц, которая может быть изменена до 100 МГц, частоту дискретизации 1 Гвыб/с и относительно большую глубину памяти 24 Мб.
Дисплей 7 дюймов, очень красивый и яркий. Он имеет различные математические функции, фильтры нижних и верхних частот, декодирование SPI и I2C и многое другое. Итак, еще раз большое спасибо Banggood.com и убедитесь, что вы проверили этот осциллограф в их магазине.
Тем не менее, это основной принцип работы бесколлекторного двигателя. Если вам нужны еще реальные живые примеры и вы научились управлять бесколлекторными двигателями с помощью Arduino, вам следует ознакомиться со второй частью этого руководства.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любые вопросы в разделе комментариев ниже и не забудьте проверить мою коллекцию проектов Arduino.
Не стесняйтесь задавать любые вопросы в разделе комментариев ниже и не забудьте проверить мою коллекцию проектов Arduino.
Конструкция, принцип работы и применение
1. Концепция бесщеточного двигателяБесщеточный двигатель (BLDC) — это электродвигатель, который использует постоянное магнитное поле и датчик для определения его положения, полностью без использования щеток (щеток), чтобы устранить трение. Оттуда это помогает уменьшить шум, чтобы двигатель работал плавно, и в то же время экономить потребление энергии.
Двигатель полностью бесщеточный, чтобы исключить трение Как и в обычных синхронных двигателях, обмотки BLDC также расположены под углом 120 градусов друг к другу в статорном пространстве. Магниты также прочно прикреплены к корпусу ротора и способны возбуждать двигатель. В частности, для работы мини-бесщеточного двигателя требуется датчик положения ротора, который помогает двигателю работать лучше.
Бесщеточный двигатель состоит из следующих частей:
- Статор: Обычно состоит из железных сердечников (листы электротехнической стали изолированы вместе) и обмоток. Обмотка бесщеточного двигателя также отличается от обмотки обычного трехфазного двигателя переменного тока. Ротор
- : В основном, эта деталь аналогична другим двигателям с постоянными магнитами.
- Датчик Холла: из-за характеристик антиэлектродвижущей силы двигателя BLDC он имеет трапециевидную форму, поэтому для его нормальной конфигурации управления также требуется датчик для определения положения магнитного поля ротора по отношению к фазам обмотки статора. Для этого люди часто используют датчики Холла, которые для краткости можно назвать датчиками Холла.
Как следует из названия, бесщеточные двигатели постоянного тока характеризуются отсутствием щеток. В щеточных двигателях щетка пропускает ток через коммутатор и течет в обмотки ротора.
В щеточных двигателях щетка пропускает ток через коммутатор и течет в обмотки ротора.
Бесщеточные двигатели не передают ток на обмотки ротора, поскольку обмотки вообще не находятся на роторе. Вместо этого основной ротор представляет собой постоянный магнит, у него есть катушки, которые не вращаются, а закреплены над статором. Поскольку эти катушки не двигаются, ни щетка, ни коммутатор не нужны.
В бесщеточном двигателе постоянный магнит вращается за счет изменения направления магнитного поля, создаваемого катушками, неподвижно расположенными вокруг него. Чтобы контролировать это вращение, вам необходимо отрегулировать величину комбинированного направления тока, протекающего по этим обмоткам.
4. Преимущества бесщеточного двигателя Типичный бесщеточный двигатель имеет 3 обмотки на статоре, поэтому он будет иметь до 6 электрических проводников, отходящих от самих обмоток. Между тем, 3 из этих проводов будут подключены внутри, а остальные 3 будут выходить из корпуса двигателя. Электропроводка в корпусе двигателя BLDC сложнее, чем когда вы соединяете только отрицательную и положительную клеммы силового элемента.
Электропроводка в корпусе двигателя BLDC сложнее, чем когда вы соединяете только отрицательную и положительную клеммы силового элемента.
Сделайте это, мощность двигателя не известна как:
Большим преимуществом этой динамической основы является результат производительности, так как мы можем двигаться непрерывно с максимальной силой вращения (также называемой крутящим моментом). Напротив, база времени получит максимальный крутящий момент только в определенных точках внутри вращения. Это еще и дом, поэтому даже моторы не более чем мини могут обеспечить значительную мощность.
Второй причиной отказа от приоритетов является хорошая производительность теста. Двигатель BLDC управляется с помощью механизма обратной связи, чтобы точно обеспечить крутящий момент и скорость вращения, желаемые пользователем. Основной контроль заключается в том, чтобы получить ускорение и сократить срок службы, если это автоматическое питание от батареи, это поможет продлить срок службы батареи и срок службы.
Двигатель BLDC также считается двигателем с высокой надежностью и низким электрическим шумом, поскольку он не имеет щеток. В щеточном двигателе щетка и коллектор будут изнашиваться из-за постоянного, частого контакта с движением, а также генерировать искры и нагреваться в точке контакта.
В частности, электрический шум считается результатом сильных искр, которые часто возникают в местах, где щетка проходит через отверстия внутри коллектора. Это также объясняет, почему двигатели BLDC обычно считаются более подходящими для приложений, в которых необходимо избегать электрических помех.
Двигатели BLDC также считаются долговечными. 5. Идеальное применение для бесщеточных двигателей Бесщеточные двигатели уже давно используются в производстве стиральных машин, кондиционеров и другой бытовой электроники. А недавно этот мотор появился и в вентиляторах, из-за их высокого КПД, что позволило значительно снизить количество потребляемой вентилятором мощности.
BLDC также используется для работы пылесоса. В некоторых случаях изменение настроек их программы управления приведет к значительному скачку скорости вращения. Это пример управляемости этих двигателей первого порядка.
Бесщеточные двигатели также используются для вращения жестких дисков. Благодаря их долговечности привод прослужит дольше в течение длительного времени. В то же время энергоэффективность двигателя также способствует снижению энергопотребления.
Двигатель BLDC также идеально подходит для дронов. Их точное управление положением делает их особенно подходящими для многоцелевых дронов, которые управляются путем точного контроля положения и скорости вращения каждого винта.
Заключение
В статье выше мы узнали, что бесколлекторные двигатели отличаются превосходной производительностью, управляемостью и долговечностью. Для получения максимальной отдачи от этих двигателей необходим тщательный и тщательный контроль.
Контакт для подробной консультации: 093. 659.2556
659.2556
- Bao An Technical Service Акционерное общество — Bao An Automation
- Адрес: Van Tra, An Dong, An Duong, Hai Phong City
- Горячая линия: 093.659.2556
- Веб-сайт: https://baoanjsc.com.vn
- Электронная почта: [email protected]
- Фан-страница: https://www.facebook.com/BaoAnAutomation
1,690 05.11.2022
Комментарий о содержании
Принцип работы двигателя BLDC — руководство по электротехнике
Привет друзья,
В этой статье я предоставляю вам некоторую базовую информацию о бесколлекторном двигателе постоянного тока, т.е. двигателе BLDC. С помощью этой информации вы можете легко понять принцип работы двигателя постоянного тока BLDC и принцип работы.
Характеристики крутящий момент-скорость и гибкость двигателя постоянного тока сделали его очень привлекательным выбором для применения в системах управления, робототехнике и тяге.
Однако у него есть несколько недостатков, таких как коллекторы и щетки, которые имеют тенденцию изнашиваться и должны периодически обслуживаться. Затем возникает искрение на задних кромках сегментов коллектора, что представляет определенную опасность возгорания в присутствии летучих материалов.
Разработка бесщеточного двигателя постоянного тока обусловлена желанием отказаться от коллектора и щеток, сохранив при этом весьма желательные характеристики двигателя постоянного тока.
В двигателе постоянного тока для поддержания вращения ротора механизм коммутатора/щетки действует как механический переключатель, обеспечивающий реверсирование токов в обмотках якоря в нужное время для поддержания крутящего момента в выбранном направлении.
Для преобразования обычного двигателя постоянного тока в бесщеточный двигатель требуется система, заменяющая коллекторно-щеточный механизм датчиком, определяющим положение катушек, и переключателем для изменения направления тока в катушках при подходящее время. В бесщеточном двигателе постоянного тока считывание и переключение выполняются электронным способом.
В бесщеточном двигателе постоянного тока считывание и переключение выполняются электронным способом.
Это электронное коммутационное устройство устраняет коллекторное устройство и щетки в двигателе постоянного тока и, следовательно, достигается более надежная и менее шумная работа.
Датчик углового положения использует преобразователь на эффекте Холла или оптический датчик для определения того, какие катушки должны быть запитаны. Эта информация вместе с заданием скорости подается на генератор импульсов, приводящий в действие источник микросхемы, который, в свою очередь, подает ток на статор.
Очень важно поддерживать как можно более низкую индуктивность обмоток статора, чтобы свести к минимуму запас энергии, когда катушка находится под напряжением. Эта энергия должна рассеиваться при отключении тока, а коммутация упрощается, когда накопленная энергия невелика.
Конструкция бесщеточного двигателя постоянного тока
В отличие от обычного двигателя постоянного тока, бесщеточный двигатель постоянного тока имеет конструкцию «наизнанку», то есть полюса возбуждения вращаются, а якорь неподвижен. Полюса возбуждения состоят из постоянных магнитов, установленных внутри стального цилиндра, а якорь намотан на многослойной железной конструкции с прорезями.
Полюса возбуждения состоят из постоянных магнитов, установленных внутри стального цилиндра, а якорь намотан на многослойной железной конструкции с прорезями.
Обмотки якоря переключаются транзисторами или тринисторами (вместо коммутатора) при правильном положении ротора, чтобы поддерживать поле якоря в пространственной квадратуре с полюсами поля.
Двигатели BLDC могут иметь различные физические конфигурации. В зависимости от обмоток статора они могут быть сконфигурированы как однофазные, двухфазные или трехфазные двигатели. Однако чаще всего используются трехфазные двигатели BLDC с роторами на постоянных магнитах.
Каждый тип BLDC двигателя описывается либо количеством фаз обмотки статора, импульсами тока, подаваемых на обмотки транзисторами или тринисторами, либо количеством полюсов ротора. Следующая классификация бесщеточных двигателей постоянного тока также полезна для понимания принципа работы бесщеточных двигателей постоянного тока.
Однофазный одноимпульсный бесщеточный двигатель постоянного тока
Статор этого двигателя имеет только однофазную обмотку, на которую подается питание от транзистора один раз за электрический оборот.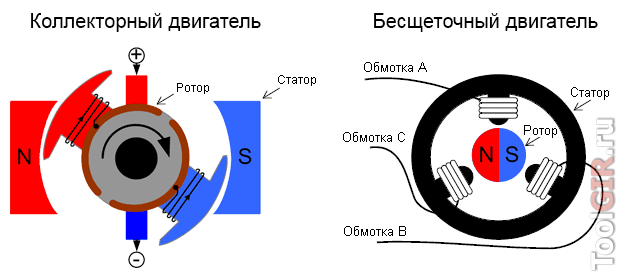 Выходной крутящий момент такого двигателя недостаточен, потому что в лучшем случае он может создавать положительный крутящий момент только выше 180 электрических градусов. Оставшееся угловое вращение должно преодолеваться за счет инерции ротора или с помощью вспомогательных моментов.
Выходной крутящий момент такого двигателя недостаточен, потому что в лучшем случае он может создавать положительный крутящий момент только выше 180 электрических градусов. Оставшееся угловое вращение должно преодолеваться за счет инерции ротора или с помощью вспомогательных моментов.
Однофазный двухимпульсный бесщеточный двигатель постоянного тока
Статор этого двигателя также имеет только однофазную обмотку, но получает два импульса, то есть его обмотка питается двумя импульсами тока противоположных направлений. Таким образом, результирующее распределение крутящего момента является более благоприятным, чем у одноимпульсного двигателя.
Тем не менее, непрерывный электромагнитный момент не достигается. Есть еще небольшие области без крутящего момента, которые необходимо шунтировать с помощью стабильных вспомогательных средств. Преимуществом этого двигателя является его простая конструкция, обеспечивающая высокий коэффициент использования материала якоря.
Двухфазный двухимпульсный бесщеточный двигатель постоянного тока
Статор такого двигателя имеет две фазные обмотки, которые попеременно питаются двумя импульсами тока. Следовательно, создаваемый крутящий момент такой же, как у однофазного двухимпульсного двигателя. Тем не менее, обмотка будет использована только на 50 процентов.
Следовательно, создаваемый крутящий момент такой же, как у однофазного двухимпульсного двигателя. Тем не менее, обмотка будет использована только на 50 процентов.
Преимущество этого двигателя заключается в его простой электронике управления. Промежутки электромагнитного момента должны быть шунтированы подходящими вспомогательными средствами, как и в случае однофазного двигателя.
Трехфазный трехимпульсный бесщеточный двигатель постоянного тока
Этот двигатель имеет статор с трехфазной обмоткой, которая смещена в пространстве на 120° по эл. Каждая фазная обмотка возбуждается одним импульсом, т. е. за электрический оборот; на статор циклически подаются три импульса тока.
Тот факт, что требуется всего три силовых транзистора или тринистора, является основным преимуществом этой конструкции двигателя. Одним из недостатков является относительно низкий коэффициент использования обмотки (в среднем около 33 процентов), а также необходимость трех датчиков положения.
Четырехфазный четырехимпульсный бесщеточный двигатель постоянного тока
Статор этого двигателя намотан четырехфазными обмотками, смещенными в пространстве на 90° электрического тока. Фазные обмотки циклически запитываются четырьмя импульсами тока. Это приводит к крутящему моменту без зазоров и использованию обмотки до 50 процентов. Однако затраты на электронику в два раза выше, чем у двухимпульсной конструкции.
3-фазный 6-импульсный двигатель BLDC Принцип работы
Статор этого двигателя намотан трехфазными обмотками, которые могут быть соединены как треугольником, так и звездой. Как правило, нейтральная точка не используется. Обмотки возбуждаются шестью импульсами шестью силовыми транзисторами или тринисторами в циклической последовательности.
Такой двигатель не только обеспечивает равномерный выходной крутящий момент, но и обеспечивает оптимальное использование обмотки. Его недостатком является относительно высокая стоимость датчиков положения и управляющей электроники.
Это приводит к наиболее распространенному бесщеточному двигателю постоянного тока — комбинации трехфазного синхронного двигателя с постоянными магнитами, трехфазного полупроводникового инвертора и датчика положения ротора, в результате чего система создает линейную характеристику крутящего момента скорости, как в обычный двигатель постоянного тока с постоянными магнитами.
На приведенном выше рисунке схематически представлен трехфазный 6-пульсный бесщеточный двигатель постоянного тока, использующий транзисторный инвертор в качестве преобразователя постоянного тока в переменный. Там, где существуют требования к высокой мощности, вместо транзисторов используются тиристоры.
Другие характеристики, такие как стоимость компонентов, надежность компонентов и простота схемы инвертора, имеют важное значение, когда доступны тиристоры и транзисторы с сопоставимыми возможностями управления мощностью.
Неотъемлемой частью системы бесщеточного двигателя постоянного тока является датчик положения ротора. Хотя существует несколько методов определения углового положения, наиболее часто используемыми являются датчики на эффекте Холла и электрооптические датчики.
Хотя существует несколько методов определения углового положения, наиболее часто используемыми являются датчики на эффекте Холла и электрооптические датчики.
Преимущества бесщеточного двигателя постоянного тока
- Бесщеточный двигатель постоянного тока обладает всеми преимуществами обычного двигателя постоянного тока, но лишен недостатков механической системы переключения, состоящей из коллектора и щеток.
- Ротор бесщеточной машины постоянного тока имеет меньшую инерцию по сравнению с эквивалентной машиной постоянного тока, поскольку не имеет обмоток и коллектора. Поэтому это лучший выбор для приложений в сервосистемах и для управления компьютерной периферией.
- Благодаря отсутствию щеток двигатели BLDC способны работать на высоких скоростях. КПД двигателей BLDC обычно составляет от 85 до 9.0 процентов, тогда как коллекторные двигатели постоянного тока имеют КПД от 75 до 80 процентов.
- Меньше проблем, вызванных радиочастотными и электромагнитными помехами, а также долгий срок службы.
Основным недостатком является сложность электронной схемы управления, особенно в приложениях, где требуется плавное вращение и, следовательно, необходимо последовательно переключать большое количество катушек.
Применение бесщеточных двигателей постоянного тока
- В приложениях с большей мощностью, включая тяговые, бесщеточные двигатели быстро заменяют обычные двигатели постоянного тока.
- Еще одним важным применением являются шпиндельные приводы для дисковой памяти и компьютерной периферии.
- Они используются в электромобилях, гибридных транспортных средствах и электрических велосипедах, промышленных роботах, станках с ЧПУ.
- В диапазоне мощности, равной дробным единицам, они используются в различных типах приводов в современных самолетах и спутниковых системах.
- Интегральные бесщеточные двигатели постоянного тока мощностью 1 л.с. были разработаны для силовых установок и прецизионных сервосистем.
Спасибо, что прочитали о «принципе работы двигателя BLDC».
Бесщеточный двигатель постоянного тока (BLDC) — конструкция и работа
Электрические двигатели были разработаны в различных специальных типах, таких как шаговые двигатели, серводвигатели, двигатели с постоянными магнитами и т. д. У нас есть много вариантов, чтобы выбрать двигатель, который наиболее подходит для нашей области применения. Бесщеточный двигатель постоянного тока или двигатель BLDC — это тип, который наиболее подходит для приложений, требующих высокой надежности, высокой эффективности, большего крутящего момента на единицу веса и т. д. В этой статье подробно рассказывается о двигателях BLDC.
Конструкция двигателя BLDC
Расположение коллектора и щеток помогает достичь однонаправленного крутящего момента в типичном двигателе постоянного тока. Очевидно, что в бесщеточном двигателе постоянного тока отсутствует коллектор и щеточное устройство. Здесь для достижения однонаправленного крутящего момента используется встроенный инвертор/схема переключения. Вот почему эти двигатели иногда также называют «двигателями с электронной коммутацией» .
Вот почему эти двигатели иногда также называют «двигателями с электронной коммутацией» .
Как и любой другой электродвигатель, BLDC двигатель также состоит из двух основных частей — статора и ротора. Постоянные магниты установлены на роторе бесконтактного двигателя постоянного тока, а статор намотан на определенное количество полюсов. Также к обмотке статора подключена цепь управления. В большинстве случаев инвертор/схема управления или контроллер встроены в узел статора. Это основное конструктивное различие между бесщеточным двигателем и типичным двигателем постоянного тока.
Типичный контроллер обеспечивает трехфазное частотно-регулируемое питание обмотки статора. Источник питания управляется логическими схемами управления и подает питание на определенные полюса статора в определенный момент времени. Это можно понять из приведенных ниже анимаций о работе двигателей BLDC.
Типы двигателей BLDC
Существует два типа двигателей BLDC в зависимости от их конструкции/конструкции: (i) конструкция с внутренним ротором и (ii) конструкция с внешним ротором. Независимо от этих типов, обратите внимание, что постоянные магниты всегда установлены на роторе, а обмотка на статоре.
Независимо от этих типов, обратите внимание, что постоянные магниты всегда установлены на роторе, а обмотка на статоре.
- Конструкция с внутренним ротором (inrunner): это обычная конструкция, в которой ротор расположен в сердечнике (в центре), а обмотка статора окружает его.
BLDC двигатель с внутренним ротором (Фото: Kaspars Dambis — flickr) - Конструкция с внешним ротором (аутраннер): В этой конфигурации ротор является внешним. то есть обмотки статора расположены на сердечнике, а ротор с постоянными магнитами окружает статор.
Внешний ротор BLDC двигатель
Как работает двигатель BLDC?
Обмотки статора асинхронного двигателя постоянного тока подключены к схеме управления (интегральная схема переключения или схема инвертора).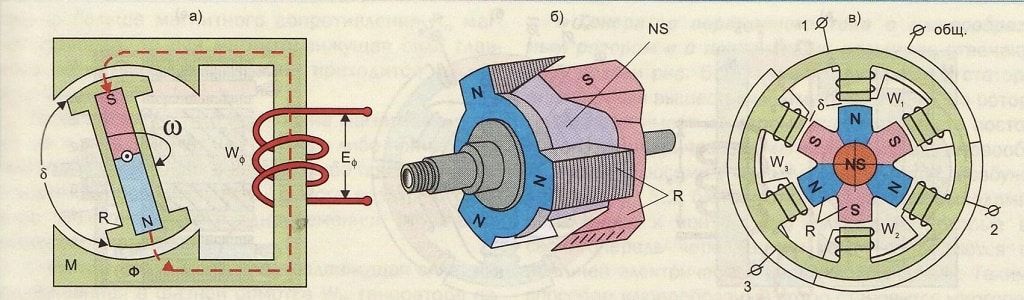 Схема управления подает питание на соответствующую обмотку в нужное время по схеме, которая вращается вокруг статора. Постоянные магниты на роторе пытаются выровняться с возбужденными электромагнитами статора, и как только он выровняется, следующие электромагниты будут под напряжением. Таким образом, ротор продолжает вращаться. Анимации ниже дадут вам четкое представление о ‘как работает бесщеточный двигатель постоянного тока?’
Схема управления подает питание на соответствующую обмотку в нужное время по схеме, которая вращается вокруг статора. Постоянные магниты на роторе пытаются выровняться с возбужденными электромагнитами статора, и как только он выровняется, следующие электромагниты будут под напряжением. Таким образом, ротор продолжает вращаться. Анимации ниже дадут вам четкое представление о ‘как работает бесщеточный двигатель постоянного тока?’
| Inner rotor BLDC motor working animation |
| Outer rotor BLDC motor working animation |
Бесщеточный и щеточный двигатель постоянного тока
- Щетки требуют частой замены из-за механического износа, следовательно, щеточный двигатель постоянного тока требует периодического обслуживания. Кроме того, когда щетки передают ток на коммутатор, возникает искрение. Щетки ограничивают максимальную скорость и количество полюсов, которые может иметь якорь. Все эти недостатки устранены в бесколлекторном двигателе постоянного тока. Электронная схема управления требуется в бесщеточном двигателе постоянного тока для переключения магнитов статора, чтобы двигатель работал. Это делает двигатель BLDC потенциально менее прочным.
- Преимущества двигателя BLDC по сравнению с щеточными двигателями: повышенная эффективность, надежность, более длительный срок службы, отсутствие искрения и меньший уровень шума, больший крутящий момент на единицу веса и т. д.
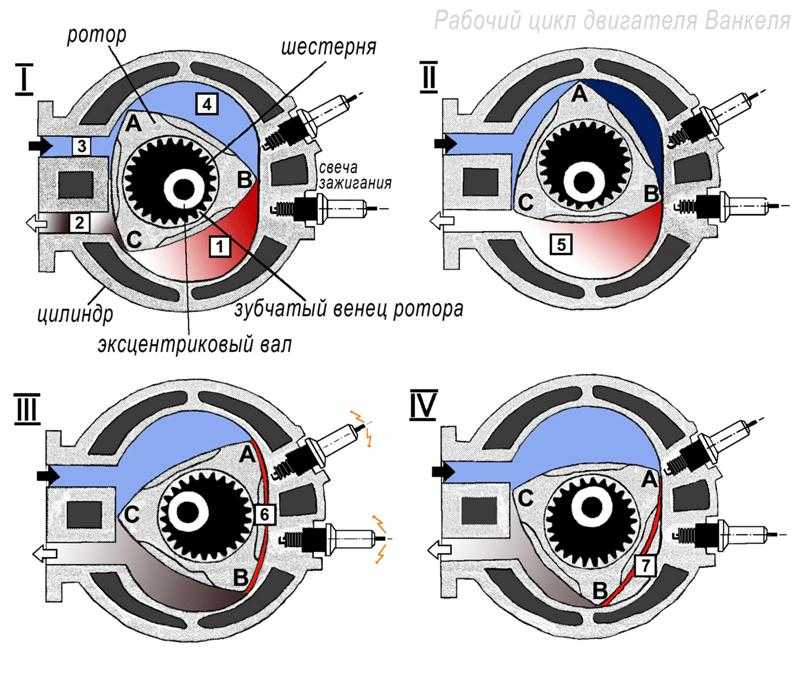 Кроме того, когда щетки передают ток на коммутатор, возникает искрение. Щетки ограничивают максимальную скорость и количество полюсов, которые может иметь якорь. Все эти недостатки устранены в бесколлекторном двигателе постоянного тока. Электронная схема управления требуется в бесщеточном двигателе постоянного тока для переключения магнитов статора, чтобы двигатель работал. Это делает двигатель BLDC потенциально менее прочным.
Кроме того, когда щетки передают ток на коммутатор, возникает искрение. Щетки ограничивают максимальную скорость и количество полюсов, которые может иметь якорь. Все эти недостатки устранены в бесколлекторном двигателе постоянного тока. Электронная схема управления требуется в бесщеточном двигателе постоянного тока для переключения магнитов статора, чтобы двигатель работал. Это делает двигатель BLDC потенциально менее прочным.Применение двигателей постоянного тока BLDC
Двигатели постоянного тока BLDC удовлетворяют многим требованиям, предъявляемым к щеточным двигателям постоянного тока. Но поскольку они требуют сложной схемы управления и из-за соображений стоимости, они еще не полностью заменили коллекторные двигатели постоянного тока, особенно в недорогих приложениях. Несмотря на это, во многих случаях преобладают двигатели BLDC –
Несмотря на это, во многих случаях преобладают двигатели BLDC –
- Бытовая электроника – компьютерные жесткие диски, небольшие охлаждающие вентиляторы, CD/DVD-плееры и т. д., а также современные бытовые приборы, где требуется бесшумная работа, например, стиральные машины, кондиционеры и т. д.
- Электромобили — многие электромобили, включая электрические и гибридные автомобили, электрические велосипеды используют двигатели BLDC.
- Они имеют широкий спектр применения во многих других областях, включая робототехнику, промышленность, системы управления движением и т. д.
Электродвигатель постоянного тока | АТО.com
Что такое бесщеточный двигатель постоянного тока?
Бесщеточный двигатель постоянного тока (BLDC) на самом деле представляет собой трехфазный синхронный двигатель: ротор следует за вращающимся магнитным полем, и его движение синхронизируется с переменным напряжением, подаваемым на обмотку. Обычно в щеточном двигателе постоянного тока после подачи постоянного напряжения механический инвертор (щетка) в двигателе будет генерировать мощность переменного тока независимо от скорости. В отличие от коллекторного двигателя постоянного тока, бесщеточный двигатель постоянного тока взаимодействует с электронным контроллером привода, чтобы заменить функцию щетки и преобразовать подаваемую мощность постоянного тока в мощность переменного тока, что обеспечивает производительность, эквивалентную коллекторному двигателю постоянного тока без щетки с ограниченным сроком службы. . Поэтому двигатели BLDC также называют двигателями EC (электронной коммутации), чтобы отличить их от механических двигателей коммутации, которые включают щетки. Во многих случаях бесщеточный двигатель постоянного тока является идеальным решением для замены коллекторного двигателя постоянного тока или коллекторного двигателя.
В отличие от коллекторного двигателя постоянного тока, бесщеточный двигатель постоянного тока взаимодействует с электронным контроллером привода, чтобы заменить функцию щетки и преобразовать подаваемую мощность постоянного тока в мощность переменного тока, что обеспечивает производительность, эквивалентную коллекторному двигателю постоянного тока без щетки с ограниченным сроком службы. . Поэтому двигатели BLDC также называют двигателями EC (электронной коммутации), чтобы отличить их от механических двигателей коммутации, которые включают щетки. Во многих случаях бесщеточный двигатель постоянного тока является идеальным решением для замены коллекторного двигателя постоянного тока или коллекторного двигателя.
Конструкция бесщеточного двигателя постоянного тока
Большинство бесщеточных двигателей постоянного тока представляют собой двигатели с внутренним ротором, статор которых закреплен с помощью катушек, а ротор в середине вращается под действием постоянных магнитов на вращающемся валу. В форвакуумном двигателе статор расположен внутри, а ротор состоит из корпуса колоколообразной формы, вращающегося снаружи, на котором установлен магнит. Как внутренний, так и внешний роторный двигатель используют пазовые обмотки, а обмоточный провод наматывается на железный сердечник, так что линии магнитного поля обмотки могут вытекать и сходиться в определенной форме. Чтобы свести к минимуму потери на вихревые токи, статор сделан из тонких изолирующих металлических пластин, которые компенсируют друг друга.
В форвакуумном двигателе статор расположен внутри, а ротор состоит из корпуса колоколообразной формы, вращающегося снаружи, на котором установлен магнит. Как внутренний, так и внешний роторный двигатель используют пазовые обмотки, а обмоточный провод наматывается на железный сердечник, так что линии магнитного поля обмотки могут вытекать и сходиться в определенной форме. Чтобы свести к минимуму потери на вихревые токи, статор сделан из тонких изолирующих металлических пластин, которые компенсируют друг друга.
Преимущество встроенного двигателя BLDC заключается в том, что ротор имеет низкую инерцию вращения и быстрое рассеивание тепла. Напротив, в двигателе BLDC с внешним бегунком из-за наличия корпуса ротора и магнита нагревательная спираль изолирована от окружающей среды, а рассеивание тепла происходит относительно медленно. Поскольку момент инерции ротора велик и трудно контролировать балансировку корпуса ротора, двигатель с внешним ротором не подходит для режима с высокой скоростью вращения. Поэтому двигатели с внутренним ротором широко используются в большинстве промышленных приложений и обычно конструируются как трехфазный двигатель BLDC с высоким крутящим моментом или небольшой высокоскоростной двигатель BLDC.
Поэтому двигатели с внутренним ротором широко используются в большинстве промышленных приложений и обычно конструируются как трехфазный двигатель BLDC с высоким крутящим моментом или небольшой высокоскоростной двигатель BLDC.
На рисунке справа показан внешний вид и внутренняя структура типичного бесщеточного двигателя постоянного тока с внутренним ротором. Следует отметить, что постоянный магнит этого двигателя установлен на роторе, а катушка расположена снаружи. Это полностью отличается от коллекторных двигателей постоянного тока с катушками на роторе и постоянными магнитами снаружи. Поскольку ротор BLDC двигателя не использует катушку, нет необходимости подавать на него ток, поэтому нет угольной щетки.
Принцип работы бесколлекторного двигателя постоянного тока
Известно, что статор бесщеточного двигателя постоянного тока представляет собой якорь обмотки катушки, а ротор представляет собой постоянный магнит. Если к двигателю BLDC подается фиксированный постоянный ток, двигатель генерирует только постоянное магнитное поле и не может вращаться. Только когда положение ротора двигателя определяется в режиме реального времени, а затем к фазе двигателя подается соответствующий ток в соответствии с положением ротора, так что статор создает вращающееся магнитное поле с равномерным изменением направления, тогда двигатель может вращаться вместе с магнитным полем.
Только когда положение ротора двигателя определяется в режиме реального времени, а затем к фазе двигателя подается соответствующий ток в соответствии с положением ротора, так что статор создает вращающееся магнитное поле с равномерным изменением направления, тогда двигатель может вращаться вместе с магнитным полем.
Рис. 2 (A). Три катушки, расположенные под углом 120 градусов за счет управления фазой и током катушки.
Рисунок 2 (B): Ток сначала проходит через U, а затем через W. Стрелка показывает магнитный поток, создаваемый катушкой U.
Рисунок 2 (C): Ток протекает через U и W. две стрелки представляют магнитный поток, создаваемый катушкой U и W соответственно.
Рис. 2 (D). Широкая стрелка представляет результирующий магнитный поток — сумму магнитных потоков, создаваемых U и W.
На рис. 2 (А) показаны статор (катушка) и ротор (постоянный магнит) трехфазного бесщеточного двигателя постоянного тока с тремя катушками. Мы возьмем эту схему, чтобы проиллюстрировать, как вращать ротор. Чтобы заставить бесщеточный двигатель постоянного тока работать, нам нужно знать направление и время тока в катушке. В этом примере три катушки, расположенные на расстоянии 120º, обозначены буквами U, V, W соответственно. Когда ток проходит через эти три катушки, генерируются три соответствующих магнитных поля, которые называются U-фазой, V-фазой и W-фазой. Если ток проходит только через фазу U, результирующий магнитный поток показан стрелкой на рисунке 2 (Б). На самом деле все три катушки соединены проводом от каждой катушки, и сгенерировать фазу U в одиночку невозможно. На рис. 2 (С) показан ток, проходящий через катушки U и W, и магнитный поток, создаваемый каждой катушкой, также указан стрелкой. Широкая стрелка на рисунке 2 (D) представляет собой синтетический поток, который является результатом объединения магнитных полей U и W. Этот большой поток заставит внутренний ротор вращаться до тех пор, пока полюса S и N постоянного магнита ротора не совпадут.
Мы возьмем эту схему, чтобы проиллюстрировать, как вращать ротор. Чтобы заставить бесщеточный двигатель постоянного тока работать, нам нужно знать направление и время тока в катушке. В этом примере три катушки, расположенные на расстоянии 120º, обозначены буквами U, V, W соответственно. Когда ток проходит через эти три катушки, генерируются три соответствующих магнитных поля, которые называются U-фазой, V-фазой и W-фазой. Если ток проходит только через фазу U, результирующий магнитный поток показан стрелкой на рисунке 2 (Б). На самом деле все три катушки соединены проводом от каждой катушки, и сгенерировать фазу U в одиночку невозможно. На рис. 2 (С) показан ток, проходящий через катушки U и W, и магнитный поток, создаваемый каждой катушкой, также указан стрелкой. Широкая стрелка на рисунке 2 (D) представляет собой синтетический поток, который является результатом объединения магнитных полей U и W. Этот большой поток заставит внутренний ротор вращаться до тех пор, пока полюса S и N постоянного магнита ротора не совпадут. совмещен с этой стрелкой (полюс N ближе всего к кончику стрелки). Короче говоря, U, V и W должны быть постоянно включены, чтобы синтетический поток двигался, чтобы генерировать вращающееся магнитное поле, которое постоянно воздействует на магнит ротора и поддерживает работу двигателя.
совмещен с этой стрелкой (полюс N ближе всего к кончику стрелки). Короче говоря, U, V и W должны быть постоянно включены, чтобы синтетический поток двигался, чтобы генерировать вращающееся магнитное поле, которое постоянно воздействует на магнит ротора и поддерживает работу двигателя.
Прочитайте соответствующий блог: Бесщеточный двигатель постоянного тока, как это работает?
Пары полюсов трехфазного бесщеточного двигателя постоянного тока
Каждая катушка трехфазного синхронного двигателя будет иметь полюса N и S, а количество магнитных полюсов в каждой фазе равно числу полюсов двигателя. Поскольку магнитные полюса расположены парами, бесщеточный двигатель постоянного тока имеет 2, 4, 6, 8… полюсов.
Когда обмотки каждой фазы фаз А, В, С имеют только одну катушку, равномерно и симметрично распределенную по окружности, ток изменяется один раз и вращающееся магнитное поле вращается на один круг, представляющий собой пару полюсов. Если трехфазные обмотки А, В, С состоят из двух последовательно соединенных катушек, а размах каждой катушки составляет 1/4 окружности, то составное магнитное поле, создаваемое трехфазным током, по-прежнему является вращающимся магнитным полем. , а ток изменяется один раз, вращающееся магнитное поле поворачивается только на 1/2 оборота, что составляет 2 пары полюсов. Аналогично, если обмотки расположить по определенным правилам, можно получить 3 пары полюсов и 4 пары полюсов.
, а ток изменяется один раз, вращающееся магнитное поле поворачивается только на 1/2 оборота, что составляет 2 пары полюсов. Аналогично, если обмотки расположить по определенным правилам, можно получить 3 пары полюсов и 4 пары полюсов.
Восьмиполюсный двигатель имеет восемь магнитных полюсов, то есть двигатель имеет четыре пары магнитных полюсов. В случае постоянной выходной мощности, чем больше пар полюсов двигателя, тем ниже скорость двигателя, но больше крутящий момент. Поэтому при выборе двигателя учитывайте, какой пусковой момент необходим нагрузке.
Разница между коллекторным двигателем постоянного тока и бесщеточным двигателем постоянного тока
Коллекторный двигатель постоянного тока
- Когда коллекторный двигатель постоянного тока работает, катушка обмотки и коммутатор вращаются, постоянный магнит и угольная щетка не вращаются, а переменный изменение направления тока катушки осуществляется за счет вращения коллектора двигателя и щетки. Он основан на изменении фазы угольной щетки и ротора для изменения магнитного полюса катушки обмотки, поэтому при внезапном изменении фазы будет генерироваться искра. Время трения между угольной щеткой и ротором расходует угольную щетку и влияет на срок службы двигателя.
- Щеточный двигатель постоянного тока имеет дешевую цену и прост в управлении, нужно только отрегулировать ток при номинальном напряжении, чтобы контролировать скорость. Однако щеточный двигатель постоянного тока имеет небольшой пусковой момент, и его легко заклинить в случае большого трения. Поэтому коллекторные двигатели постоянного тока подходят только для тех случаев, когда требования к двигателю не высоки.
- Во время обслуживания щеточного двигателя постоянного тока следует заменять не только щетку, но и другие аксессуары, такие как поворотный механизм, что увеличивает стоимость и влияет на производительность всей машины. Кроме того, щеточный двигатель постоянного тока имеет такие недостатки: большие габариты, малая мощность, короткий срок службы и угольные щетки легко перегружаются при длительной работе.
 Он основан на изменении фазы угольной щетки и ротора для изменения магнитного полюса катушки обмотки, поэтому при внезапном изменении фазы будет генерироваться искра. Время трения между угольной щеткой и ротором расходует угольную щетку и влияет на срок службы двигателя.
Он основан на изменении фазы угольной щетки и ротора для изменения магнитного полюса катушки обмотки, поэтому при внезапном изменении фазы будет генерироваться искра. Время трения между угольной щеткой и ротором расходует угольную щетку и влияет на срок службы двигателя.
Бесщеточный двигатель постоянного тока
- Бесщеточный двигатель постоянного тока использует электронную коммутацию, катушка не перемещается, а магнитный полюс вращается. Элемент Холла определяет положение магнитного полюса постоянного магнита. Основываясь на этом восприятии, электронная схема используется для переключения направления тока катушки во времени, чтобы гарантировать, что магнитная сила в правильном направлении генерируется для привода двигателя, устраняя недостатки коллекторного двигателя постоянного тока.
- Низкая скорость и высокая мощность. Самая выдающаяся особенность бесщеточных двигателей постоянного тока по сравнению с обычными двигателями заключается в том, что они могут нормально работать на более низких скоростях и с большей мощностью. Поскольку бесщеточный двигатель постоянного тока обладает преимуществами традиционного двигателя постоянного тока и в то же время устраняет угольную щетку и структуру контактных колец, машина может работать на низкой скорости и высокой мощности, а также может сэкономить редуктор для прямого привода большого нагрузка. Поскольку сам двигатель не имеет угольных щеток и потребления возбуждения, он исключает потребление энергии многоступенчатого торможения. Двигатель BLDC также может осуществлять бесступенчатое регулирование скорости, и его диапазон регулирования скорости очень широк, а его перегрузочная способность также выше.
- Простой ремонт и обслуживание. Это одна из выдающихся характеристик бесщеточного двигателя постоянного тока. Из-за небольшого размера и легкого веса двигателя BLDC обслуживание относительно простое. В обычное время операторы могут предотвратить различные неисправности двигателя посредством ежедневного технического обслуживания и эффективно продлить срок службы машины.
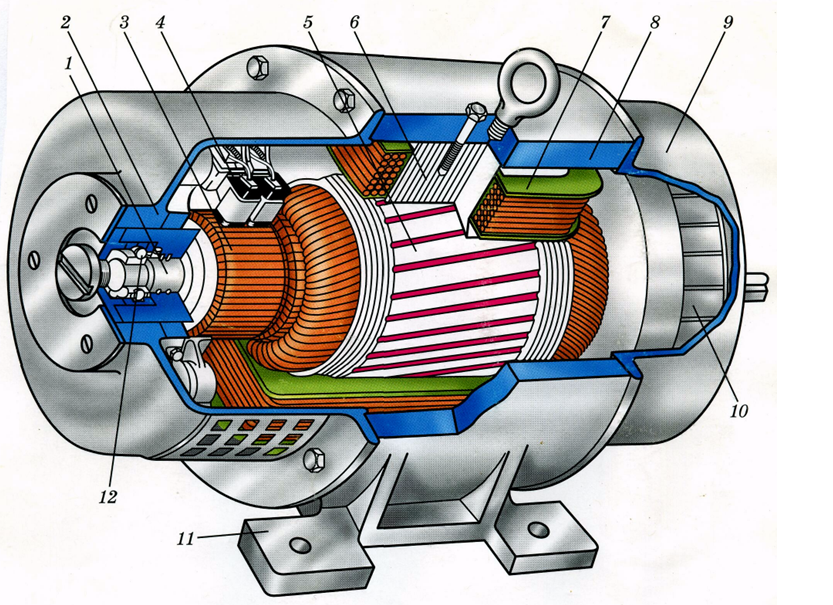 Поскольку сам двигатель не имеет угольных щеток и потребления возбуждения, он исключает потребление энергии многоступенчатого торможения. Двигатель BLDC также может осуществлять бесступенчатое регулирование скорости, и его диапазон регулирования скорости очень широк, а его перегрузочная способность также выше.
Поскольку сам двигатель не имеет угольных щеток и потребления возбуждения, он исключает потребление энергии многоступенчатого торможения. Двигатель BLDC также может осуществлять бесступенчатое регулирование скорости, и его диапазон регулирования скорости очень широк, а его перегрузочная способность также выше.Прочтите соответствующий блог: Коллекторный двигатель постоянного тока и бесщеточный двигатель постоянного тока.
Зачем покупать бесщеточные двигатели постоянного тока в интернет-магазине ATO.com?
ATO предлагает широкий ассортимент лучших бесщеточных электродвигателей постоянного тока и контроллеров, обеспечивающих высокий крутящий момент, эффективность и скорость при небольших размерах, отвечающих вашим конкретным требованиям. Уникальная конструкция наших комплектов двигателей BLDC обеспечивает несколько ключевых преимуществ, перечисленных ниже, и они широко используются в электромобилях с новой энергией, медицине, автоматизации, упаковке и так далее.
Уникальная конструкция наших комплектов двигателей BLDC обеспечивает несколько ключевых преимуществ, перечисленных ниже, и они широко используются в электромобилях с новой энергией, медицине, автоматизации, упаковке и так далее.
Для двигателя ATO BLDC
- Индивидуальный 3-фазный 8-полюсный (4 пары полюсов) бесщеточный электродвигатель постоянного тока с номинальной мощностью от 100 Вт до 15 кВт
- Поставляются с различными компактными квадратными фланцами размером 60 мм, 80 мм, 110 мм, 130 мм, 180 мм
- BLDC двигатель с высоким крутящим моментом, работающий от источника питания постоянного тока 12 В/ 24 В/ 48 В, также доступен 72 В/ 96 В
- Высокоскоростной небольшой бесщеточный двигатель постоянного тока от 5000 до 17000 об/мин с напряжением 12/24 В
- Номинальная скорость от 1000 об/мин до 3000 об/мин, степень защиты IP65, высокий КПД до 85 %
- Сильный пусковой момент, высокая удельная мощность, малый момент инерции, низкий уровень шума
- Предлагает конкурентоспособные опции с добавленной стоимостью, такие как согласованный контроллер двигателя bldc вместе с тормозом, установка его на планетарный/червячный редуктор для увеличения крутящего момента
Для контроллера двигателя ATO BLDC
- Специально разработан для электромобилей, таких как электрические мотоциклы и скутеры
- Поддержка любого числа полюсов бесщеточного двигателя постоянного тока высокой мощности и высокого крутящего момента
- Анти-электромагнитные помехи, сильные антивибрационные характеристики
- Индикатор неисправности указывает на различные неисправности, что удобно пользователям для обнаружения и обслуживания
- Мощные и интеллектуальные микропроцессоры, высокоскоростное синхронное выпрямление с малыми потерями, ШИМ-модуляция
- Чем больше пусковой ток, тем выше пусковая скорость, что обеспечивает плавную и эффективную работу в различных диапазонах скоростей
- С функцией защиты от перегрева: когда температура слишком высокая или слишком низкая, ток будет автоматически уменьшаться для защиты контроллера и аккумулятора
Двигатель BLDC должен работать вместе с контроллером. Почему? Основная причина в том, что: Бесщеточный двигатель постоянного тока не имеет щетки и коммутатора, должен быть электронный коммутатор для поддержания направления вращения. Электронный коммутатор состоит из шести мощных MOSFET-транзисторов, которые управляются бесщеточным контроллером двигателя. В то же время контроллер может также управлять запуском и остановкой двигателя, вперед и назад, регулированием скорости, защитой от перенапряжения, перегрузки по току и пониженного напряжения. Таким образом, необходимо иметь контроллер бесщеточного двигателя, даже если бесщеточный двигатель постоянного тока напрямую включен, это бесполезно.
Почему? Основная причина в том, что: Бесщеточный двигатель постоянного тока не имеет щетки и коммутатора, должен быть электронный коммутатор для поддержания направления вращения. Электронный коммутатор состоит из шести мощных MOSFET-транзисторов, которые управляются бесщеточным контроллером двигателя. В то же время контроллер может также управлять запуском и остановкой двигателя, вперед и назад, регулированием скорости, защитой от перенапряжения, перегрузки по току и пониженного напряжения. Таким образом, необходимо иметь контроллер бесщеточного двигателя, даже если бесщеточный двигатель постоянного тока напрямую включен, это бесполезно.
Как правило, двигатель BLDC в сочетании с контроллером BLDC и редуктором представляют собой экономичные решения для приложений управления движением, где требуется высокая эффективность и высокий крутящий момент. ATO порекомендует несколько самых продаваемых бесщеточных двигателей постоянного тока и соответствующие им контроллеры BLDC для удовлетворения ваших потребностей в таблице ниже.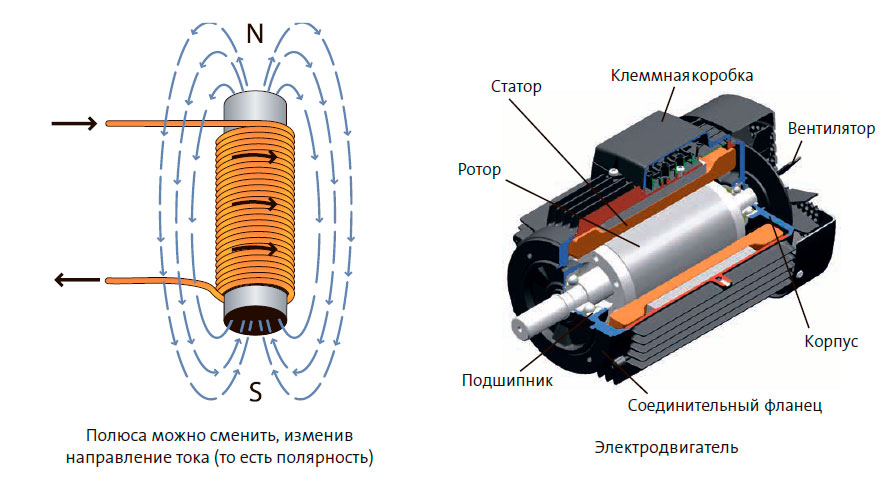 Если вам нужна информация и расценки для всех моделей двигателей, перейдите к нашему руководству по каталогу продукции и прайс-листу.
Если вам нужна информация и расценки для всех моделей двигателей, перейдите к нашему руководству по каталогу продукции и прайс-листу.
Бесщеточный двигатель постоянного тока и блок управления
Бесщеточный двигатель постоянного тока с фазовым углом 60 и 120 градусов должен управляться соответствующим бесщеточным контроллером с фазовым углом 60 и 120 градусов, а контроллеры двух фазовых углов не могут быть заменены напрямую. Существует два типа правильной проводки для 8 проводов, соединяющих бесщеточный двигатель с фазовым углом 60 градусов с контроллером с фазовым углом 60 градусов, один для прямого вращения, а другой для обратного вращения. Для бесщеточного двигателя с фазовым углом 120 градусов путем регулировки последовательности фаз выводов катушки и проводов Холла к двигателю и контроллеру подключено шесть правильных проводов, три из которых подключены к двигателю для прямого вращения, а другой три к двигателю для обратного вращения. Если бесщеточный двигатель реверсирует, указывая на то, что фазовый угол бесщеточного контроллера и бесщеточного двигателя совпадают, направление двигателя можно отрегулировать, изменив проводку A и C между выводом холла бесщеточного двигателя и бесщеточным контроллером.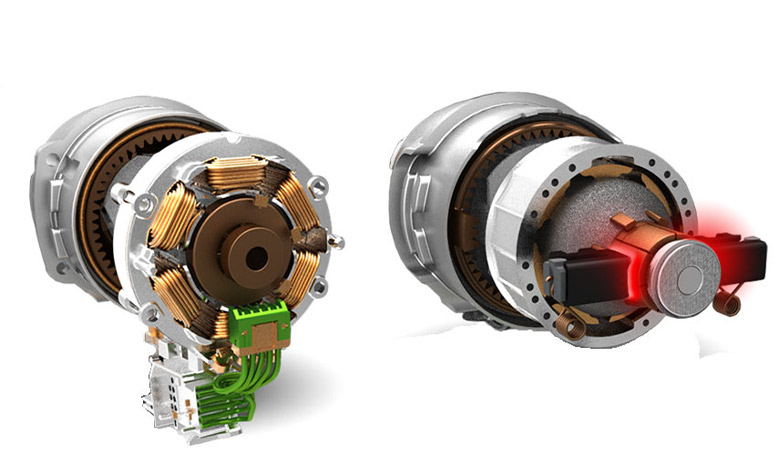 В то же время основные фазовые линии A и B бесщеточного двигателя постоянного тока и бесщеточного контроллера переключаются.
В то же время основные фазовые линии A и B бесщеточного двигателя постоянного тока и бесщеточного контроллера переключаются.
Как правило, большинство бесщеточных двигателей постоянного тока с проводкой контроллера в основном аналогичны по принципу. Электродвигатель постоянного тока с высоким крутящим моментом ATO оснащен тремя удлинительными проводами питания и пятью сигнальными проводами Холла. Эти 8 проводов должны поочередно соответствовать соответствующим выводам контроллера, иначе двигатель не сможет нормально вращаться. Мы возьмем двигатель ATO 400 Вт 24 В постоянного тока и соответствующий ему контроллер в качестве примеров, чтобы показать вам, как подключить двигатель к контроллеру и заставить двигатель вращаться. Посмотрите видео ниже для получения более подробной информации о двигателе BLDC с инструкциями по подключению контроллера. Операция проводки также подходит для ATO с высоким крутящим моментом 24 В / 48 В / 72 В / 9.Бесщеточный двигатель постоянного тока 6 В.
 youtube.com/embed/zkKBsODW-tU» frameborder=»0″ allowfullscreen=»allowfullscreen»>
youtube.com/embed/zkKBsODW-tU» frameborder=»0″ allowfullscreen=»allowfullscreen»> Управление бесщеточным двигателем постоянного тока
ШИМ-управление скоростью бесщеточного двигателя постоянного тока Амплитуда получается на выходе, и эти импульсы используются для замены синусоидальной волны или волны требуемой формы. То есть в полупериоде формы выходного сигнала генерируется несколько импульсов, так что эквивалентное напряжение каждого импульса представляет собой синусоидальный сигнал, а выходной сигнал является гладким, а гармоники низшего порядка незначительны. Модуляция ширины каждого импульса по определенным правилам может изменить выходное напряжение схемы инвертора и выходную частоту.
Принцип управления скоростью ШИМ бесщеточного двигателя постоянного тока отличается от принципа управления скоростью двигателя переменного тока. Он не регулирует скорость двигателя с помощью частотной модуляции, а изменяет амплитуду напряжения, подаваемого на якорь, регулируя ширину импульса управляющего напряжения, чтобы достичь цели изменения скорости бесщеточного двигателя постоянного тока. Его метод модуляции — амплитудная модуляция. И есть два способа управления скоростью ШИМ:
Его метод модуляции — амплитудная модуляция. И есть два способа управления скоростью ШИМ:
1. Сигнал ШИМ используется для управления временем проведения аудиона. Чем больше время проводимости, тем больше время работы, тем выше будет скорость двигателя.
2. Используйте управляющий сигнал ШИМ для управления временем проводимости триода и изменения управляющего напряжения.
Прямое и обратное управление двигателем BLDC
Путем изменения логического соотношения переключающих трубок инвертора последовательность включения каждой фазы обмотки якоря изменяется для реализации прямого и обратного вращения двигателя. Для получения максимального среднего электромагнитного момента как при прямом, так и при обратном вращении двигателя для обеспечения симметричной работы необходимо спроектировать взаимное позиционное соотношение между датчиком положения ротора и основным магнитным полюсом ротора и каждой фазной обмоткой статора. , а также правильную логическую связь.
Управление вперед/назад (DIR)
Направление вращения двигателя можно контролировать, управляя включением и выключением контактов «DIR» и «COM». Клемма «DIR» подтягивается до +12 с внутренним сопротивлением, которое можно использовать с пассивными контактными выключателями или с блоками управления, такими как ПЛК с открытым коллектором. Когда «DIR» и клемма «COM» не подключены, двигатель вращается по часовой стрелке (лицом к валу двигателя), в противном случае он вращается против часовой стрелки. во избежание повреждения бесщеточного контроллера постоянного тока двигатель BLDC должен быть остановлен перед изменением направления вращения двигателя.
Клемма «DIR» подтягивается до +12 с внутренним сопротивлением, которое можно использовать с пассивными контактными выключателями или с блоками управления, такими как ПЛК с открытым коллектором. Когда «DIR» и клемма «COM» не подключены, двигатель вращается по часовой стрелке (лицом к валу двигателя), в противном случае он вращается против часовой стрелки. во избежание повреждения бесщеточного контроллера постоянного тока двигатель BLDC должен быть остановлен перед изменением направления вращения двигателя.
Выходной сигнал скорости (SPEED)
Бесщеточный контроллер постоянного тока выдает пользователям импульсный сигнал, пропорциональный скорости двигателя, через клеммы SPEED~COM. Количество импульсов на оборот равно 6-кратному числу пар полюсов двигателя, частота СКОРОСТИ (Гц) равна количеству импульсов на оборот, умноженному на скорость (об/мин) и деленному на 60. Пример: 4-полюсный двигатель, 24 импульса на оборот, когда скорость двигателя 500 об/мин, выходная частота клеммы SPEED 200 Гц.