Издания | Библиотечно-издательский комплекс СФУ
- Издания(активная вкладка)
- Услуги
Все года изданияТекущий годПоследние 2 годаПоследние 5 летПоследние 10 лет
Все виды изданийУчебная литератураНаучная литератураЖурналыГазетыМатериалы конференций
Все темыЕстественные и точные наукиАстрономияБиологияГеографияГеодезия. КартографияГеологияГеофизикаИнформатикаКибернетикаМатематикаМеханикаОхрана окружающей среды. Экология человекаФизикаХимияТехнические и прикладные науки, отрасли производстваАвтоматика. Вычислительная техникаБиотехнологияВодное хозяйствоГорное делоЖилищно-коммунальное хозяйство. Домоводство. Бытовое обслуживаниеКосмические исследованияЛегкая промышленностьЛесная и деревообрабатывающая промышленностьМашиностроениеМедицина и здравоохранениеМеталлургияМетрологияОхрана трудаПатентное дело. Изобретательство. РационализаторствоПищевая промышленностьПолиграфия. Репрография. ФотокинотехникаПриборостроениеПрочие отрасли экономикиРыбное хозяйство. АквакультураСвязьСельское и лесное хозяйствоСтандартизацияСтатистикаСтроительство. АрхитектураТранспортХимическая технология. Химическая промышленностьЭлектроника. РадиотехникаЭлектротехникаЭнергетикаЯдерная техникаОбщественные и гуманитарные наукиВнешняя торговляВнутренняя торговля. Туристско-экскурсионное обслуживаниеВоенное делоГосударство и право. Юридические наукиДемографияИскусство. ИскусствоведениеИстория. Исторические наукиКомплексное изучение отдельных стран и регионовКультура. КультурологияЛитература. Литературоведение. Устное народное творчествоМассовая коммуникация. Журналистика. Средства массовой информацииНародное образование. ПедагогикаНауковедениеОрганизация и управлениеПолитика и политические наукиПсихологияРелигия. АтеизмСоциологияФизическая культура и спортФилософияЭкономика и экономические наукиЯзыкознаниеХудожественная литератураХудожественные произведения
ФотокинотехникаПриборостроениеПрочие отрасли экономикиРыбное хозяйство. АквакультураСвязьСельское и лесное хозяйствоСтандартизацияСтатистикаСтроительство. АрхитектураТранспортХимическая технология. Химическая промышленностьЭлектроника. РадиотехникаЭлектротехникаЭнергетикаЯдерная техникаОбщественные и гуманитарные наукиВнешняя торговляВнутренняя торговля. Туристско-экскурсионное обслуживаниеВоенное делоГосударство и право. Юридические наукиДемографияИскусство. ИскусствоведениеИстория. Исторические наукиКомплексное изучение отдельных стран и регионовКультура. КультурологияЛитература. Литературоведение. Устное народное творчествоМассовая коммуникация. Журналистика. Средства массовой информацииНародное образование. ПедагогикаНауковедениеОрганизация и управлениеПолитика и политические наукиПсихологияРелигия. АтеизмСоциологияФизическая культура и спортФилософияЭкономика и экономические наукиЯзыкознаниеХудожественная литератураХудожественные произведения
Все институтыВоенно-инженерный институтБазовая кафедра специальных радиотехнических системВоенная кафедраУчебно-военный центрГуманитарный институтКафедра ИТ в креативных и культурных индустрияхКафедра истории России, мировых и региональных цивилизацийКафедра культурологии и искусствоведенияКафедра рекламы и социально-культурной деятельностиКафедра философииЖелезногорский филиал СФУИнженерно-строительный институтКафедра автомобильных дорог и городских сооруженийКафедра инженерных систем, зданий и сооруженийКафедра проектирования зданий и экспертизы недвижимостиКафедра строительных конструкций и управляемых системКафедра строительных материалов и технологий строительстваИнститут архитектуры и дизайнаКафедра архитектурного проектированияКафедра градостроительстваКафедра дизайнаКафедра дизайна архитектурной средыКафедра изобразительного искусства и компьютерной графикиИнститут гастрономииБазовая кафедра высшей школы ресторанного менеджментаИнститут горного дела, геологии и геотехнологийКафедра геологии месторождений и методики разведкиКафедра геологии, минералогии и петрографииКафедра горных машин и комплексовКафедра инженерной графикиКафедра маркшейдерского делаКафедра открытых горных работКафедра подземной разработки месторожденийКафедра технической механикиКафедра технологии и техники разведкиКафедра шахтного и подземного строительстваКафедра электрификации горно-металлургического производстваИнститут инженерной физики и радиоэлектроникиБазовая кафедра «Радиоэлектронная техника информационных систем»Базовая кафедра инфокоммуникацийБазовая кафедра физики конденсированного состояния веществаБазовая кафедра фотоники и лазерных технологийКафедра нанофазных материалов и нанотехнологийКафедра общей физикиКафедра приборостроения и наноэлектроникиКафедра радиотехникиКафедра радиоэлектронных системКафедра современного естествознанияКафедра теоретической физики и волновых явленийКафедра теплофизикиКафедра экспериментальной физики и инновационных технологийКафедры физикиИнститут космических и информационных технологийБазовая кафедра «Интеллектуальные системы управления»Базовая кафедра «Информационные технологии на радиоэлектронном производстве»Базовая кафедра геоинформационных системКафедра высокопроизводительных вычисленийКафедра вычислительной техникиКафедра информатикиКафедра информационных системКафедра прикладной математики и компьютерной безопасностиКафедра разговорного иностранного языкаКафедра систем автоматики, автоматизированного управления и проектированияКафедра систем искусственного интеллектаИнститут математики и фундаментальной информатикиБазовая кафедра вычислительных и информационных технологийБазовая кафедра математического моделирования и процессов управленияКафедра алгебры и математической логикиКафедра высшей и прикладной математикиКафедра математического анализа и дифференциальных уравненийКафедра математического обеспечения дискретных устройств и системКафедры высшей математики №2афедра теории функцийИнститут нефти и газаБазовая кафедра пожарной и промышленной безопасностиБазовая кафедра проектирования объектов нефтегазового комплексаБазовая кафедра химии и технологии природных энергоносителей и углеродных материаловКафедра авиационных горюче-смазочных материаловКафедра бурения нефтяных и газовых скважинКафедра геологии нефти и газаКафедра геофизикиКафедра машин и оборудования нефтяных и газовых промысловКафедра разработки и эксплуатации нефтяных и газовых месторожденийКафедра технологических машин и оборудования нефтегазового комплексаКафедра топливообеспеченя и горюче-смазочных материаловИнститут педагогики, психологии и социологииКафедра информационных технологий обучения и непрерывного образованияКафедра общей и социальной педагогикиКафедра психологии развития и консультированияКафедра современных образовательных технологийКафедра социологииИнститут торговли и сферы услугБазовая кафедра таможенного делаКафедра бухгалтерского учета, анализа и аудитаКафедра гостиничного делаКафедра математических методов и информационных технологий в торговле и сфере услугКафедра технологии и организации общественного питанияКафедра товароведения и экспертизы товаровКафедра торгового дела и маркетингаОтделение среднего профессионального образования (ОСПО)Институт управления бизнес-процессамиБазовая кафедра Федеральной службы по финансовому мониторингу (Росфинмониторинг)Кафедра бизнес-информатики и моделирования бизнес-процессовКафедра маркетинга и международного администрированияКафедра менеджмент производственных и социальных технологийКафедра цифровых технологий управленияКафедра экономики и управления бизнес-процессамиКафедра экономической и финансовой безопасностиИнститут физ.
По релевантностиСначала новыеСначала старыеПо дате поступленияПо названиюПо автору
Текст в электронном виде
Проектирование баз данных
Программы внеурочной деятельности по художественному творчеству для 1-4 классов.
 Экологическое…
Экологическое…История
История
Обогащение полезных ископаемых
Народы Сибири и Дальнего Востока c древних времен до наших дней
Материалы LXII Российской археолого-этнографической конференции студентов и молодых ученых. Кызыл…
Вводно-коррективный курс по фонетике английского языка
Философия
Безопасность жизнедеятельности в радиоэлектронике и физике. Опасности технических систем
Технологии рекультивации земель и формирования архитектуры техногенных ландшафтов для предприятий…
Химия окружающей среды
Устройство и принцип действия синхронной машины
Устройство синхронных машин.
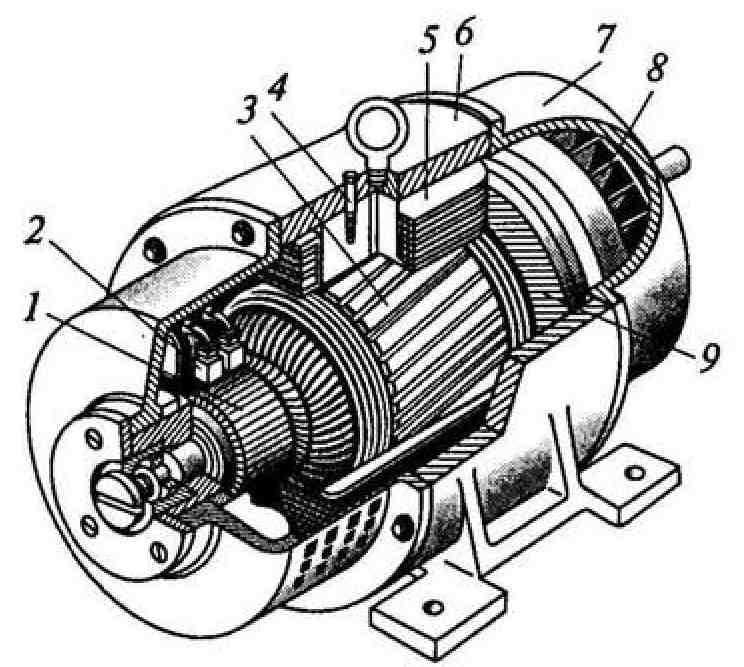
Синхронные машины вне зависимости от режима работы состоят из двух основных частей: неподвижного статора, выполняющего функции якоря и ротора, вращающегося внутри статора и служащего индуктором (рис. 4.1).
Статор трехфазной синхронной машины аналогичен статору трехфазного асинхронного двигателя. Он состоит из корпуса /, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Он состоит из корпуса /, цилиндрического сердечника 2, набранного из отдельных пластин электротехнической стали, и трехфазной обмотки 3, уложенной в пазы сердечника.
Ротор синхронной машины представляет собой электромагнит постоянного тока, который создает магнитное поле, вращающееся вместе с ротором. Ротор имеет обмотку возбуждения 4, которая через специальные контактные кольца 5 питается постоянным током от выпрямителя или от небольшого генератора постоянного тока, называемого возбудителем.
В отечественной энергетике также используются синхронные машины с «бесщеточным» возбуждением. Обмотка ротора таких машин питается от выпрямителя, вращающегося вместе с ротором. Выпрямитель в свою очередь получает питание от возбудителя, имеющего вращающуюся вместе с ротором трехфазную обмотку, возбуждаемую неподвижными постоянными магнитами.
Роторы синхронных машин бывают двух типов: с явно выраженными и неявно выраженными полюсами.
Роторы с явно выраженными полюсами (рис. 4.1) применяются в сравнительно тихоходных машинах (80 – 1000 об/мин), например гидрогенераторах; они имеют значительноечисло полюсов. Конструктивно роторы этого типа (рис. 4.2) состоят из вала 6, ступицы 7, полюсов 8, укрепляемых в шлицах ступицы, полюсных катушек 4 возбуждения, размещенных на полюсах.
4.1) применяются в сравнительно тихоходных машинах (80 – 1000 об/мин), например гидрогенераторах; они имеют значительноечисло полюсов. Конструктивно роторы этого типа (рис. 4.2) состоят из вала 6, ступицы 7, полюсов 8, укрепляемых в шлицах ступицы, полюсных катушек 4 возбуждения, размещенных на полюсах.
Поверхность полюсного наконечника полюсов имеет такой профиль, что магнитная индукция в воздушном зазоре машины распределяется примерно по синусоидальному закону. Для быстроходных машин (турбогенераторы, синхронные двигатели, турбокомпрессоры и т. п.) явнополюсная конструкция ротора неприменима из-за сравнительно большого диаметра ротора и возникающих в связи с этим недопустимо больших центробежных сил.
Большей механической прочностью обладает ротор с неявно выраженными полюсами. Он состоит (рис. 4.3) из сердечника 1 и обмотки возбуждения 2. Сердечник изготовляется из стальной поковки цилиндрической формы. На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения.
На его внешней поверхности фрезеруются пазы, в которые закладывается обмотка возбуждения.
Обмотка возбуждения распределяется в пазах сердечника так, чтобы создаваемое ею магнитное поле было распределено в пространстве по закону, близкому к синусоидальному.
Принцип работы и ЭДС синхронного генератора.
Работа синхронного генератора основана на явлении электромагнитной индукции. При холостом ходе обмотка якоря (статора) разомкнута, и магнитное поле машины образуется только обмоткой возбуждения ротора (рис. 4.4).
При вращении ротора синхронного генератора от проводного двигателя ПД с постоянной частотой nо магнитное поле ротора, пересекая проводники фазных обмоток статора AX, BY, CZ (рис.4.4,а) наводит в них ЭДС , где B – магнитная индукция в воздушном зазоре между статором и ротором; l – активная длина проводника; – линейная скорость пересечения проводников магнитным полем.
Выше отмечалось, что индукция В в воздушном зазоре распределена по синусоидальному закону , где — угол, отсчитываемый от нейтральной линии, поэтому ЭДС в одном проводнике .
Обозначив, получим , т.е. ЭДС в проводниках обмоток статора изменяется по синусоидальному закону.
ЭДС отдельных проводников каждой обмотки статора сдвинуты по фазе относительно друг друга, поэтому они суммируются геометрически (аналогично ЭДС статора асинхронного двигателя – см. п. 3.8.1). Действующее значение ЭДС одной фазы определяется выражением:
где – обмоточный коэффициент; – частота синусоидальных ЭДС; — число витков одной фазы обмотки статора; — число пар полюсов; – максимальный магнитный поток полюса ротора; – синхронная частота вращения.
Катушки отдельных фаз статора сдвинуты в пространстве на электрический угол, равный 1200, и их ЭДС образуют симметричную трёхфазную систему.
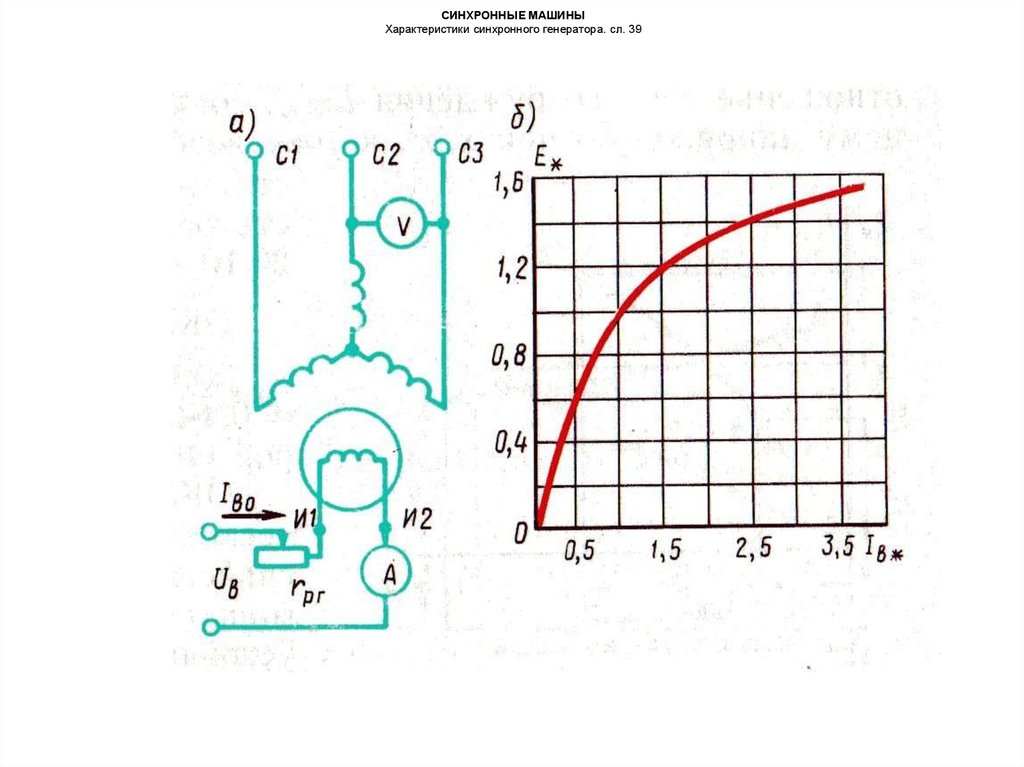
Изменяя ток возбуждения , можно регулировать магнитный поток ротора и пропорциональную ему ЭДС генератора. На рис. 4.5 представлена зависимость , снятая при номинальной частоте вращения .
Эта зависимость называется характеристикой холостого хода. Форма характеристики напоминает форму кривой намагничивания ферромагнитного сердечника. Характерной особенностью её является отсутствие пропорциональности между магнитным потоком и током возбуждения , что обусловлено явлением насыщения магнитной системы машины.
Принцип действия и вращающий момент синхронного двигателя.
Принцип действия синхронного двигателя основан на явлении притяжения разноименных полюсов двух магнитных полей – статора и ротора. Вращающееся поле статора с полюсами N и S создается при питании обмоток статора от трёхфазной сети аналогично вращающемуся полю асинхронного двигателя (на рис. 4.6 полюсы статора N и S показаны штриховкой, вращаются они против часовой стрелки с частотой ). Поле ротора создается постоянным током, протекающим по обмотке ротора.
Предположим, что ротор каким-либо способом разогнан до синхронной частоты вращения против часовой стрелки. Тогда полюсы ротора и будут вращаться с частотой ; произойдет «сцепление» этих полюсов с разноименными полюсами статора и (см. штрихованные линии на рис. 4.6).
В режиме идеального холостого хода (момент сопротивления ) оси магнитных полей статора и ротора совпадают (рис. 4.6.а). При этом на полюсы ротора действуют радиальные силы и, которые не создают ни вращающего момента, ни момента сопротивления.
Если к валу машины приложить механическую нагрузку, которая создает момент сопротивления , ось ротора и его полюсов , сместится в сторону отставания на угол (рис. 4.6,б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. Тангенциальные составляющие и создают вращающий момент , где — радиус ротора.
4.6,б). Теперь вращающее поле статора как бы “ведёт” за собой поле ротора и сам ротор. Тангенциальные составляющие и создают вращающий момент , где — радиус ротора.
Машина работает в двигательном режиме, её вращающий момент преодолевает момент сопротивления механической нагрузки.
При увеличении момента механической нагрузки на валу ротора угол увеличивается (до некоторого предела), что приводит к увеличению вращающегося момента двигателя , причем частота вращения ротора остается неизменной и равной .
Противодействующий момент и противо-ЭДС.
При работе синхронной машины в режиме нагруженного генератора (на схеме рис. 4.4,б нагрузка Zн подключена к обмоткам статора через выключатель Q) по обмоткам статора протекает ток, который создает своё вращающееся магнитное поле. В генераторном режиме, в отличие от двигательного режима, полюсы ротора опережают на угол полюсы магнитного поля статора.
В результате взаимодействия разноименных полюсов статора и ротора на ротор действует момент, направленный против вращения, т.е. тормозной момент . В установившемся режиме момент уравновешивает вращающийся момент приводного двигателя: .
При работе синхронной машины в режиме двигателя поле ротора пересекает витки трехфазной обмотки статора и в ней индуцируется ЭДС, которая согласно правилу Ленца действует навстречу току статора. По этой причине её называют противо-ЭДС. В установившемся режиме противо-ЭДС почти полностью уравновешивает напряжение сети .
Таким образом, при работе синхронной машины на нагрузку (электрическую или механическую) в обмотке статора индуцируется ЭДС Е и возникает момент ротора .
Реакция якоря в синхронной машине.
Реакция якоря – это воздействие поля якоря (статора) на магнитное поле машины. При работе синхронной машины на нагрузку (электрическую в режиме генератора и механическую в режиме двигателя) по обмоткам статора (якоря) протекают синусоидальные токи, которые создают вращающееся магнитное поле статора. Ротор имеет частоту вращения , поэтому частота ЭДС и тока статора , где — число пар полюсов машины.
Ротор имеет частоту вращения , поэтому частота ЭДС и тока статора , где — число пар полюсов машины.
Частота вращения магнитного поля статора .
Следовательно, поля ротора и статора вращаются с одной и той же частотой ; они взаимодействуют между собой и образуют результирующее вращающееся магнитное поле машины. Взаимодействие полей зависит от характера нагрузки и режима работы машины.
Рассмотрим реакцию якоря на примере двухполюсного синхронного генератора с неявно выраженными полюсами ротора, работающего на различную по характеру нагрузку .
При активной нагрузке с сопротивлением R ЭДС фазы обмотки статора и её ток совпадают по фазе и достигают максимума в тот момент, когда ось mm1 магнитного потока ротора Ф0 перпендикулярна оси nn1 катушки обмотки статора (например, АX на рис. 4.7,а).
Магнитный поток статора Фя замыкается по сердечникам статора и ротора через воздушный зазор. Таким образом, в случае активной нагрузки ось потока ротора Ф0 опережает ось потока статора Фя на электрический угол, равный 900 (поперечная реакция якоря).
При этом результирующий магнитный поток машины (ось qq1) поворачивается относительно потока ротора Ф0 на угол в направлении, противоположном направлению вращению ротора.
При чисто индуктивной нагрузке XL ток в обмотке статора отстаёт от ЭДС на 900 и поэтому достигает максимума в тот момент времени, когда полюс ротора повернётся на 900 по направлению вращения (рис. 4.7,б). В этом случае магнитный поток статора оказывается направленным навстречу магнитному потоку ротора и размагничивает машину ().
При емкостной нагрузке XC ток в фазе статора опережает ЭДС на 900 и поэтому достигает максимума в тот момент, когда полюс ротора не доходит на 900 до оси mm1 (рис. 4.7,в). Магнитный поток статора в этом случае оказывается направленным согласно с магнитным потоком ротора и намагничивает машину ().
4.7,в). Магнитный поток статора в этом случае оказывается направленным согласно с магнитным потоком ротора и намагничивает машину ().
При работе синхронной машины в режиме двигателя ток в статоре при том же направлении вращения имеет противоположное направление. Ось результирующего потока двигателя оказывается повернута относительно потока ротора на угол , но не против направления вращения, как у генератора, а по направлению вращения.
Таким образом, реакция якоря в синхронной машине изменяет как поток машины, так и его направление (в отличие от асинхронной машины, у которой ). Изменение Фрез приводит к изменению ЭДС, что неблагоприятно сказывается на работе потребителей электроэнергии при работе машины в режиме генератора.
Уменьшение неблагоприятного влияния реакции якоря достигается уменьшением магнитного потока статора за счёт увеличения воздушного зазора между ротором и статором синхронной машины.
|
⇐ ПредыдущаяСтр 7 из 11Следующая ⇒ В практике эксплуатации синхронных машин бывают случаи, когда отдельные машины выпадают из синхронизма и их роторы начинают вращаться относительно поля якоря (статора) асинхронно, с некоторым скольжением s. При выпадении из синхронизма синхронная машина ведет себя подобно асинхронной, но ввиду различия конструкции ротора и наличия в общем случае тока возбуждения асинхронный режим синхронной машины имеет ряд особенностей. Так как выпадение синхронных машин из синхронизма при авариях в энергосистемах происходит нередко, то выявление особенностей асинхронного режима и выяснение рациональных способов восстановления нормальных режимов работы имеют существенное практическое значение. Широко применяется асинхронный пуск синхронных двигателей и компенсаторов, когда невозбужденная машина приключается к сети и ее скорость достигает почти синхронной скорости подобно асинхронному двигателю. Асинхронные режимы работы невозбужденной и возбужденной синхронной машины существенным образом отличаются друг от друга. Асинхронный режим возбужденной синхронной машины является более сложным, и его можно рассматривать как наложение асинхронного режима невозбужденной асинхронной машины и режима установившегося короткого замыкания синхронного генератора. Рассмотрим в первую очередь установившийся асинхронный режим работы невозбужденной синхронной машины.
Схемы замещения и их параметры.
Если бы ротор синхронной машины обладал магнитной и электрической симметрией, то работа этой машины в асинхронном режиме без возбуждения ничем не отличалась бы от работы нормальной асинхронной машины. Однако в общем случае такой симметрии нет, и поэтому требуется самостоятельное рассмотрение вопроса. Пусть обмотка статора (якоря) трехфазной синхронной машины включена в сеть. Токи якоря при этом создают вращающееся поле, перемещающееся относительно несимметричного ротора со скоростью скольжения. Для анализа явлений при несимметричном роторе разложим вращающееся относительно него поле на два пульсирующих поля, одно из которых действует по продольной (d), а другое — по поперечной (q} оси ротора. Эти поля пульсируют со сдвигом по фазе на 90°. Кроме того, как и у асинхронной машины, рабочий процесс синхронной машины в асинхронном режиме можно привести к эквивалентному процессу при неподвижном роторе. Далее можно представить себе, что у такой машины с неподвижным ротором на статоре вместо трехфазной обмотки имеется эквивалентная двухфазная обмотка, причем одна фаза этой обмотки создает магнитный поток, пульсирующий по продольной оси, а другая фаза — поток, пульсирующий по поперечной оси ротора
Рис.1 причем напряжения этих фаз U и jU сдвинуты по фазе на 90°. При наличии успокоительной или пусковой обмотки (рис. 2, а и б) в схеме для продольной оси имеются две вторичные цепи, как и у двухклеточного асинхронного двигателя, а в схеме для поперечной оси – Рис 2, а Рис 2, б одна вторичная цепь. При отсутствии указанных обмоток (рис. 2, в и г) количество вторичных цепей уменьшается на единицу. На схемах рис. 2 принято rа = 0 и не учитываются потери в стали статора. При наличии в цепи возбуждения добавочного сопротивления (например, сопротивления гашения поля) его величина должна включаться в rf В основе рассмотрения явлений согласно рис.
Рис 2,в Рис 2,г новых параметров, будем предполагать, что сопротивления, фигурирующие в схемах рис. 2, представляют собой параметры m-фазной машины.
Асинхронные режимы различных видов синхронных машин.
При потере возбуждения синхронные генераторы переходят в асинхронный режим и их скорость вращения будет увеличиваться до тех пор, пока не наступит равенство между движущим моментом на валу и электромагнитным моментом машины. При этом машина будет потреблять из сети намагничивающий ток и отдавать в сеть активную мощность. При малых скольжениях поверхностный эффект в теле ротора турбогенератора проявляется слабо и поэтому глубина проникновения токов велика. Поэтому турбогенераторы способны развивать в асинхронном режиме большую мощность, причем потери в роторе малы и не представляют опасности в отношении нагрева ротора. Допустимую мощность турбогенератора в асинхронном режиме ограничивает ток статора, величина которого из-за большого намагничивающего тока достигает номинального значения. В большинстве случаев при I = Iн в турбогенераторах Р = (0,5 — 0,7) Pн,. Ввиду относительно благоприятных характеристик Ma = f (s) на электростанциях разрешается кратковременная работа (до 30 мин) турбогенераторов в асинхронном режиме при условии, что потери в роторе и статоре не превышают потерь при номинальном режиме и потребление реактивной мощности с точки зрения режима работы энергосистемы допустимо. В течение указанного времени можно устранить неисправности в системе возбуждения, перевести турбогенератор на резервное возбуждение или перевести нагрузку на другие турбогенераторы или станции. Асинхронные характеристики гидрогенераторов значительно менее благоприятны. Гидрогенераторы имеют шихтованные полюсы, и успокоительные обмотки во многих случаях у них отсутствуют. При отсутствии успокоительной обмотки мощность в асинхронном режиме развивается только за счет токов, индуктируемых в обмотке возбуждения. Активное сопротивление успокоительной обмотки велико, и в этом случае момент Ma при малых s также мал. Поэтому гидрогенераторы не могут развивать значительной мощности в асинхронном режиме, успокоительная обмотка быстро нагревается, и если восстановление возбуждения в течение 10—15 сек невозможно, то их нужно отключать от сети. Все синхронные двигатели имеют пусковые обмотки и обычно пускаются в ход как асинхронные двигатели, причем обмотка возбуждения замкнута через разрядное, или гасительное, сопротивление rг = (5 — 10) rf или замкнута накоротко. Кривые М, = f (s) синхронных двигателей представлены на рис.. Момент, развиваемый обмоткой возбуждения, достигает максимального значения при малых скольжениях, в особенности, когда rг = 0, так как rf мало, а относительно велико. Наоборот, момент, развиваемый пусковой обмоткой, достигает максимума при s = 0,3 — 0,4, так как активное сопротивление этой обмотки значительно больше и рассеяние меньше. При расчете кривых было принято, что сопротивление обмотки якоря ra = 0. Поэтому на этих кривых не отражено возникновение провала момента при s = 0,5 вследствие одноосного эффекта. Следует, однако, отметить, что при наличии пусковой обмотки на роторе этот эффект проявляется слабо. Начальный пусковой момент (s = 1) синхронных двигателей при U = Uн должен быть достаточно велик. С другой стороны, при малых s момент Ма также должен быть достаточно велик, так как в противном случае при пуске под нагрузкой двигатель в асинхронном режиме не сможет достичь скорости вращения, достаточно близкой к синхронной, и двигатель после включения тока возбуждения не втянется в синхронизм. Крутизну характеристики Ма = f (s) при малых s принято определять значением Мапри s = 0,05, и эту величину момента условно называют входным моментом Мвх. Очевидно, что чем больше Мвх, тем лучше условия втягивания в синхронизм. Обычно требуется, чтобы Мвх = Мп Однако для увеличения Ма необходимо увеличить активное сопротивление пусковой обмотки, а для увеличения — уменьшить его. пусковой обмотке для увеличения Мп. Стержни пусковой обмотки с целью увеличения их сечения и теплоемкости изготовляются из латуни. Как видно из рис., при пуске без разрядного сопротивления Мвх получается меньше и, кроме того, при малых s может образоваться провал момента, так как максимум момента от действия обмотки возбуждения наступает при весьма малом s. Поэтому при rг = 0 втягивание в синхронизм происходит в менее благоприятных условиях. Если синхронная машина лишена успокоительной или пусковой обмотки и имеет немассивные полюсы или ротор, то в результате сильного проявления одноосного эффекта асинхронный пуск ее возможен только на холостом ходу или при малой нагрузке на валу, причем обмотка возбуждения должна быть замкнута через значительное активное сопротивление. Синхронные двигатели с массивными роторами или полюсами имеют благоприятную характеристику Ма = f (s), если отношение При малом большое влияние на величину тока в полюсных наконечниках начинает оказывать сопротивление торцевых зон полюсного наконечника, и асинхронный момент поэтому Мa уменьшается.
⇐ Предыдущая234567891011Следующая ⇒ Читайте также: |
 Это случается вследствие перегрузки машин, значительного падения напряжения в сети и потери возбуждения в результате каких-либо неисправностей в системе возбуждения или ошибочного срабатывания автомата гашения поля. Хотя невозбужденная явно-полюсная машина может развивать в синхронном режиме определенную мощность за счет реактивного момента, обычно эта мощность является недостаточной для покрытия нагрузки, и поэтому явнополюсные машины при потере возбуждения чаще всего также выпадают из синхронизма.
Это случается вследствие перегрузки машин, значительного падения напряжения в сети и потери возбуждения в результате каких-либо неисправностей в системе возбуждения или ошибочного срабатывания автомата гашения поля. Хотя невозбужденная явно-полюсная машина может развивать в синхронном режиме определенную мощность за счет реактивного момента, обычно эта мощность является недостаточной для покрытия нагрузки, и поэтому явнополюсные машины при потере возбуждения чаще всего также выпадают из синхронизма.

 В подобной двухфазной системе взаимная индукция между фазами отсутствует и явления по осям d и q можно рассматривать независимо друг от друга. В результате вместо одной схемы замещения для симметричной асинхронной машины для синхронной машины получаем две схемы замещения — одну для продольной и другую для поперечной оси.
В подобной двухфазной системе взаимная индукция между фазами отсутствует и явления по осям d и q можно рассматривать независимо друг от друга. В результате вместо одной схемы замещения для симметричной асинхронной машины для синхронной машины получаем две схемы замещения — одну для продольной и другую для поперечной оси. 1 и 2 лежит представление о двухфазной машине. Поэтому сопротивления схем рис. 2 также следовало бы считать эквивалентными сопротивлениями двухфазной машины. Однако, чтобы избежать введения в рассмотрение
1 и 2 лежит представление о двухфазной машине. Поэтому сопротивления схем рис. 2 также следовало бы считать эквивалентными сопротивлениями двухфазной машины. Однако, чтобы избежать введения в рассмотрение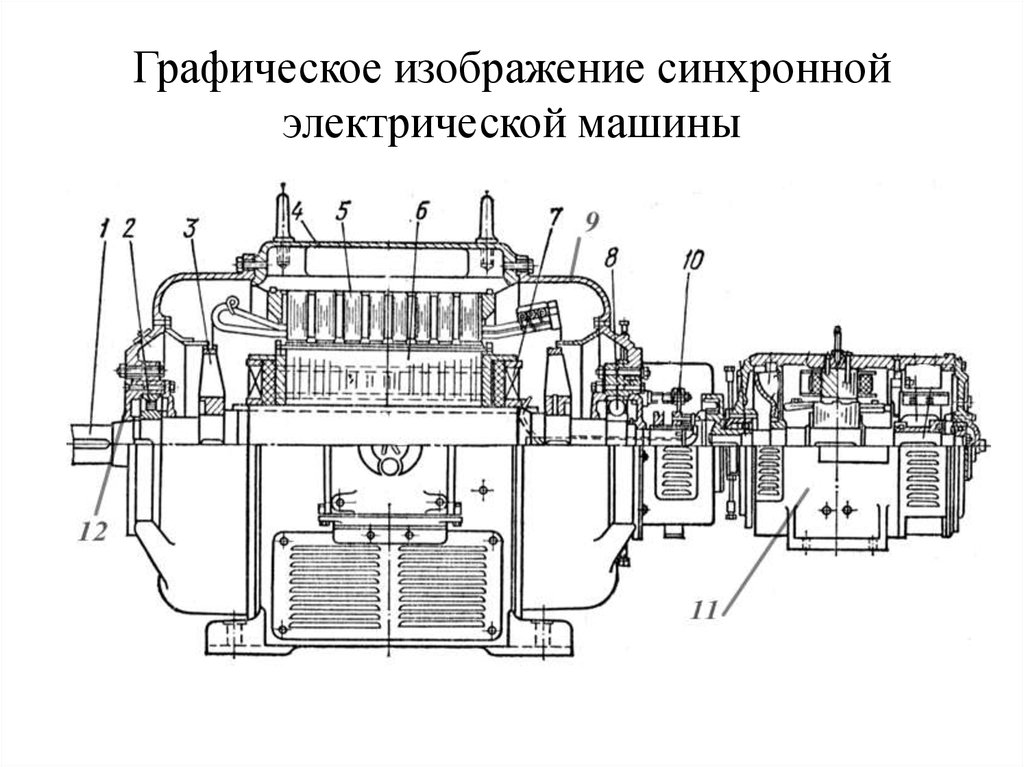 В результате активное сопротивление тела ротора мало и момент достигает весьма большой величины уже при малых скольжениях.
В результате активное сопротивление тела ротора мало и момент достигает весьма большой величины уже при малых скольжениях. Использование возможности работы турбогенераторов в асинхронном режиме позволяет увеличить надежность энергоснабжения потребителей.
Использование возможности работы турбогенераторов в асинхронном режиме позволяет увеличить надежность энергоснабжения потребителей.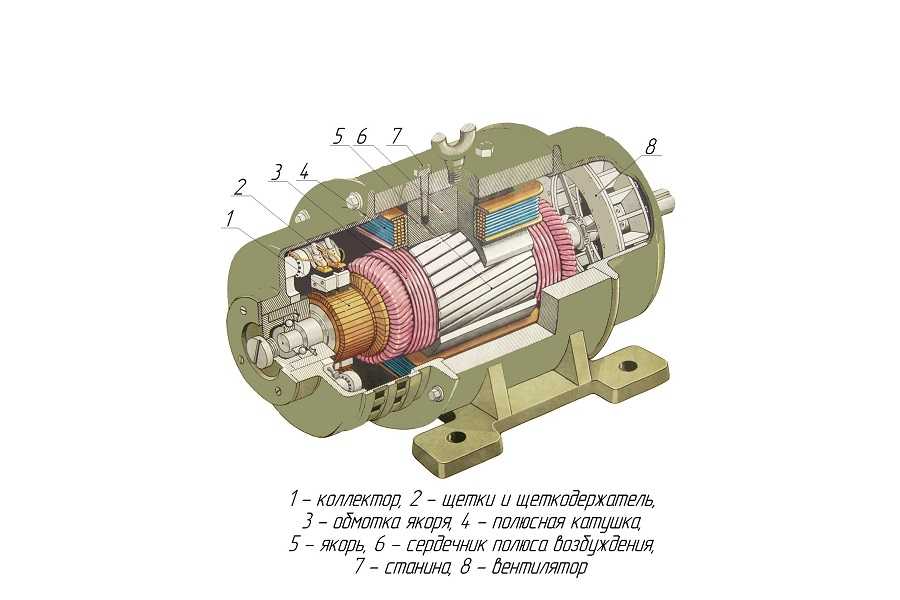 Пуск с разомкнутой обмоткой возбуждения недопустим, так как при этом может произойти повреждение ее изоляции. Скольжение невозбужденного двигателя изменяется при пуске от s = 1 до s = 0,05, когда включается ток возбуждения и двигатель втягивается в синхронизм.
Пуск с разомкнутой обмоткой возбуждения недопустим, так как при этом может произойти повреждение ее изоляции. Скольжение невозбужденного двигателя изменяется при пуске от s = 1 до s = 0,05, когда включается ток возбуждения и двигатель втягивается в синхронизм.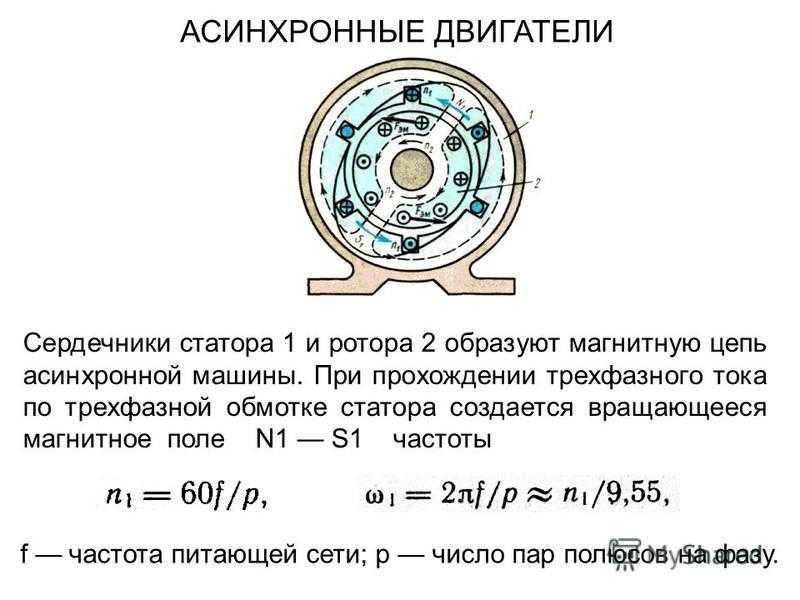
 Поэтому вопрос о выборе величин Мвх и Мп надо решать компромиссным образом и использовать явление вытеснения тока в
Поэтому вопрос о выборе величин Мвх и Мп надо решать компромиссным образом и использовать явление вытеснения тока в
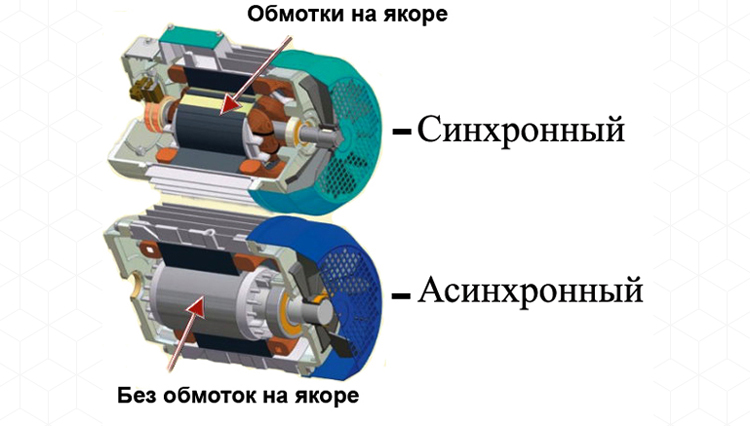
Конструкции асинхронных и синхронных машин переменного тока
По принципу действия машины переменного тока делятся на:
1. Асинхронные машины, у которых скорость вращения вала не равна скорости вращения магнитного поля статора.
2. Синхронные машины, у которых скорость вращения вала равна скорости вращения магнитного поля статора.
Асинхронные машины по конструкции ротора делятся на машины с короткозамкнутым ротором и машины с фазным ротором (или машины с контактными кольцами).
Синхронные машины по конструкции ротора делятся на машины с явновыраженными полюсами и машины с неявновыраженными полюсами.
Конструкция статора и у асинхронных и у синхронных машин одинаковая. Статор машин переменного тока состоит из корпуса. В зависимости от мощности машин корпус может быть литым чугунным, литым стальным и литым сварным. По всей окружности корпуса статора с внутренней стороны запрессовывается статорное железо, которое набирается из отдельных листов электротехнической стали. В железе статора штампуются пазы, которые также как пазы якоря машины постоянного тока могут быть закрытыми грушевидной формы и открытыми с параллельными стенками.
Также как и в пазы якоря машины постоянного тока, в пазы статора машины переменного тока укладывается обмотка с такой же изоляцией. В закрытые пазы укладывается всыпная обмотка, в открытые пазы с параллельными стенками укладывается жесткая обмотка с проводниками прямоугольного сечения. Отличается обмотка тем, что под одним полюсным делением должны лежать катушки всех трех фаз.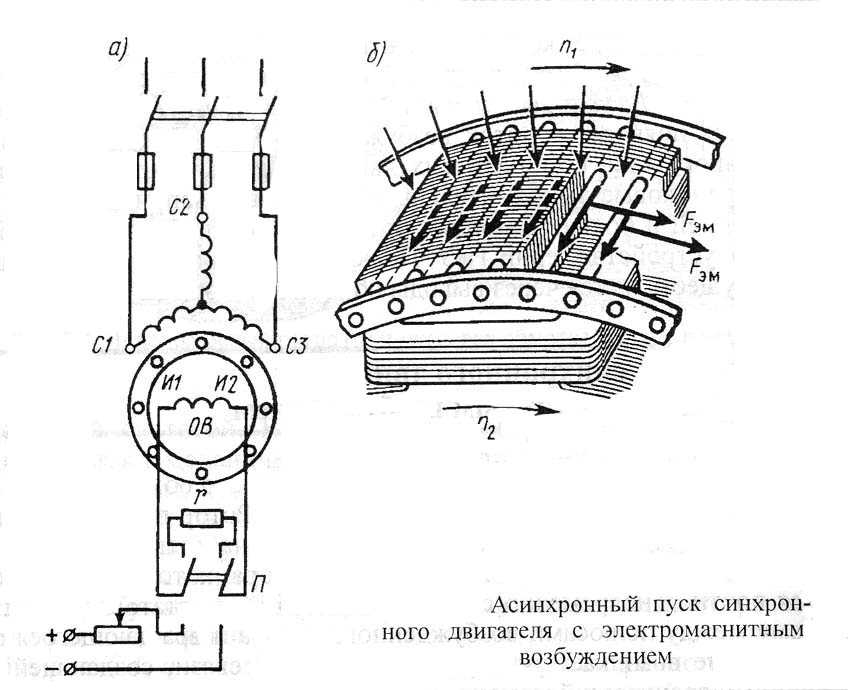
Схема трехфазной волновой обмотки машины переменного тока с Z=12, 2p=2, m=3.
В одних и тех же пазах должна лежать одна и та же фаза. Катушки одной фазы соединяются между собой. Число катушек в одной фазе всегда равно числу полюсов.
y1 = (Z / 2p) ± E = 6
Последовательное соединение катушек обмотки машины переменного тока, одна параллельная ветвь.
Под одни полюсом 180 электрических градусов.
Если машина четырехполюсная, то катушки в каждой фазе можно включить тремя способами: с одной параллельной ветвью, с двумя параллельными ветвями и четырьмя параллельными ветвями.
Включение катушек с одной параллельной ветвью в машине переменного тока.
Включение катушек с двумя параллельными ветвями в машине переменного тока.
Включение катушек с тремя параллельными ветвями в машине переменного тока.
p | 1 | 2 | 3 |
a | 1, 2 | 1, 2, 4 | 1, 2, 3, 6 |
a – число параллельных ветвей.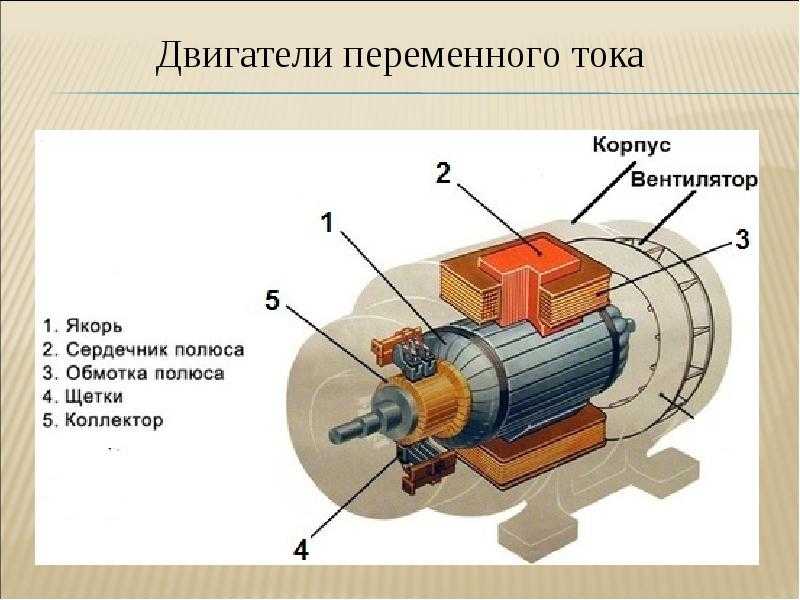
Три фазы обмотки статора могут соединяться либо в звезду, либо в треугольник. В разветвительную коробку машины выводятся начала C1, C2, C3 и концы C4, C5, C6.
A: C1-C4
B: C2-C5
C: C3-C6
Роторы асинхронных машин могут быть короткозамкнутыми и иметь следующую конструкцию: на вал напрессовывается железо с пазами. Пазы ротора имеют грушевидную форму.
Пулузакрытые (а), полуоткрытые (б), открытые (в) пазы статоров машин переменного тока.
В эти пазы под давлением, чтобы избежать образования раковин, заливается алюминий.
Если ротор фазный, то в пазы ротора укладывается, так же как и в статоре, трехфазная обмотка, но в отличие от статора, который может собираться в звезду или в треугольник, обмотка ротора всегда собирается в звезду внутри машины, а три свободных конца подключаются к контактным кольцам. Контактные кольца напрессовываются на вал. Обмотка ротора имеет то же число пар полюсов как и обмотка статора.
Роторы синхронных машин бывают двух типов: с явновыраженными полюсами и неявновыраженными полюсами. Рассмотрим конструкцию ротора с явновыраженными полюсами: на вал большого диаметра закрепляются полюса, которые набираются из отдельных листочков железа специальной формы.
Рассмотрим конструкцию ротора с явновыраженными полюсами: на вал большого диаметра закрепляются полюса, которые набираются из отдельных листочков железа специальной формы.
Полюсы явнополюсной синхронной машины переменного тока: 1 — обмотка возбуждения; 2 — сердечник полюса с полюсным наконечником и Т-образным хвостом; 3 — междукатушечные соединения; 4 — шпилька для крепления междукатушечного соединения; 5 — пружина для сжатия обмотки; 6 — клинья.
Полюса соединяются в электрическую схему таким образом, чтобы они чередовались: С-Ю-С-Ю. Гидрогенераторы вращаются со скоростью 125 об/мин. Так как скорость вращения, роторы такой конструкции работают устойчиво.
У турбогенераторов скорость вращения ротора составляет 1500 и 3000 об/мин. Явновыраженные полюса будут срезаться под действием сил инерции, чтобы этого не происходило, используются роторы с неявновыраженными полюсами. Для этого вал ротора большого диаметра делится на сегменты, в котором вырезаются пазы.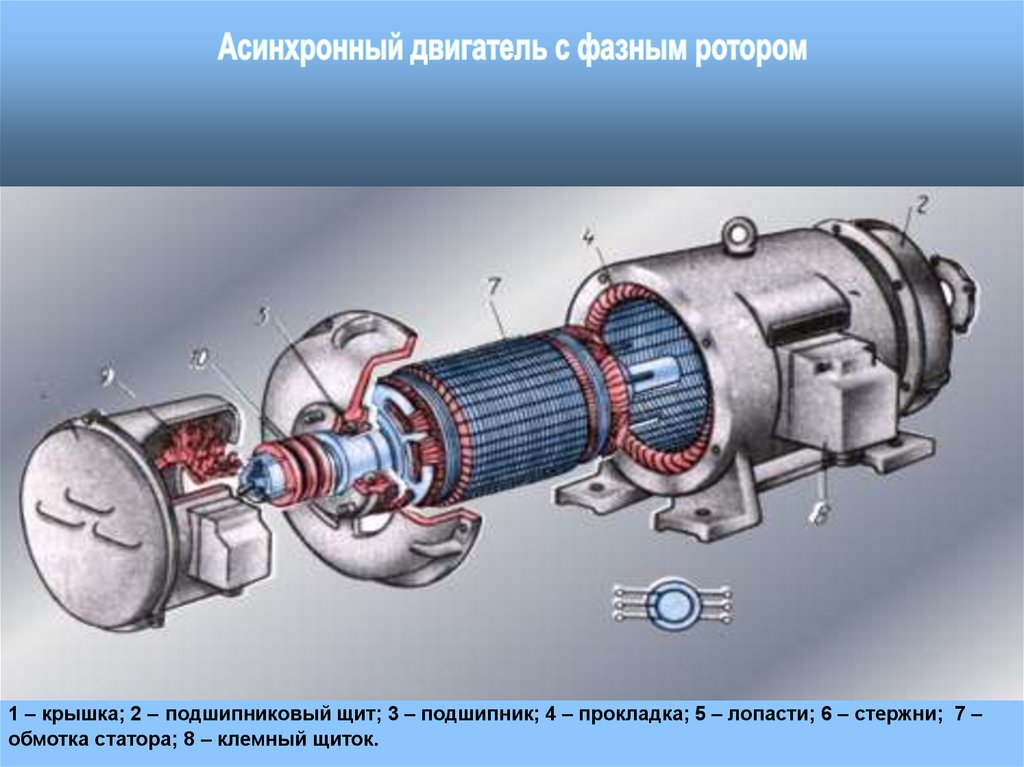
http://microlife.pro стетофонендоскоп цена медицинский купить стетоскопы медицинские.
устройство и принцип действия, характеристики синхронного генератора, включение синхронных генераторов на параллельную работу с сетью, синхронные двигатели и компенсаторы.
Синхронные машины (СМ) используют главным образом в качестве источников электрической энергии переменного тока. Их устанавливают на мощных тепловых, гидравлических и атомных электростанциях и транспортных установках (тепловозах, автомобилях, самолетах). Конструкция синхронного генератора (СГ) определяется в основном типом привода. В зависимости от этого различают турбогенераторы (приводятся во вращение паровыми или газовыми турбинами), гидрогенераторы (приводятся во вращение гидротурбинами) и дизель-генераторы (приводятся во вращение двигателями внутреннего сгорания). СМ также могут использоваться и в качестве электродвигателей для механизмов, работающих при постоянной частоте. Для улучшения коэффициента мощности сети и компенсации реактивной мощности с целью регулирования ее напряжения применяют синхронные компенсаторы (СК).
Для улучшения коэффициента мощности сети и компенсации реактивной мощности с целью регулирования ее напряжения применяют синхронные компенсаторы (СК).
Устройство и принцип действия.
Ротор синхронной машины вращается с той же скоростью и в том же направлении как и вращающееся магнитное поле.
Статор СМ 1 (рисунок 6.15) имеет такое же устройство, как и статор асинхронной машины.
Рисунок 6.15 – Схема синхронной машины
Обмотка статора синхронной машины 3 может выполнятся как трехфазной, так и с другим числом фаз, ее называют обмоткой якоря. Число полюсов оботок статора и ротора одинаковое. Сердечник статора с обмоткой называют якорем. На роторе 2 располагается обмотка возбуждения 4, она питается постоянным током от постороннего источника посредством двух контактных колец и щеток. Источник питания обычно называют возбудителем. Им может быть генератор постоянного тока небольшой мощности, расположенный на одном валу с синхронной машиной.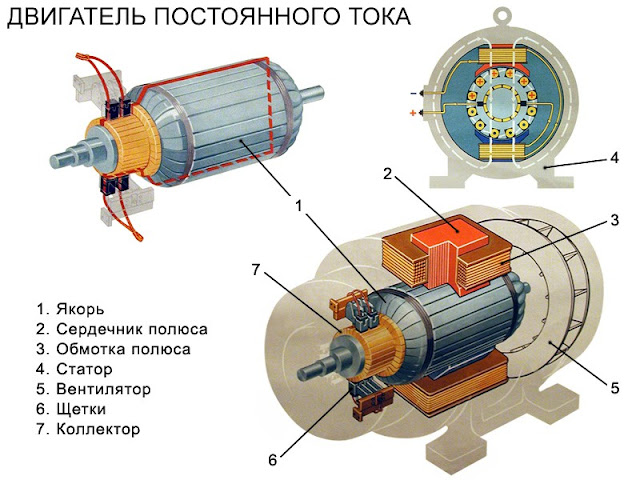 Обмотка возбуждения предназначена для создания первичного магнитного поля. Ротор с обмоткой возбуждения называется индуктором.
Обмотка возбуждения предназначена для создания первичного магнитного поля. Ротор с обмоткой возбуждения называется индуктором.
Если ротор СМ возбудить и привести во вращение со скоростью n2, то поток возбуждения Ф будет пересекать проводники обмотки статора, в результате чего в ее фазах будут индуцироваться ЭДС с частотой
. (6.24)
ЭДС статора составляют симметричную трехфазную систему ЭДС, и при подключении к обмотке статора симметричной нагрузки эта обмотка нагрузится симметричной системой токов. Такой режим называют генераторным.
В этом случае обмотка статора создает магнитное поле, вращающееся в направлении вращения ротора со скоростью
. (6.25)
Из (6.24) и (6.25) следует
. (6.26)
Поля статора и ротора создают общее вращающееся поле, вращаясь при этом с одинаковой скоростью, т.е. синхронно.
Поле статора (якоря) оказывает воздействие на поле ротора, и называемое полем реакции якоря.
Если подвести к обмотке СМ трехфазный ток из сети в результате взаимодействия магнитных полей статора и ротора последний придет во вращение. Направление и скорость вращения ротора будут такие же как и у поля статора. В этом случае СМ будет работать в двигательном режиме.
По конструкции ротора СМ подразделяются на явнополюсные и неявнополюсные (рисунок 6.16). Явнополюсные имеют выступающие полюсы и изготовляются с числом полюсов 2р > 4. Неявнополюсные имеют цилиндрический ротор, выполняемый обычно из массивной стальной поковки. В роторе фрезеруются пазы для укладки обмотки возбуждения. Эти машины выпускаются с числом полюсов 2р = 2 и 2р = 4 и имеют поэтому большие скорости вращения (1500, 3000 об/мин). При таких скоростях применение явнополюсных машин невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения.
а) б)
Рисунок 6.16 – Роторы синхронных неявнополюсной (а) и явнополюсной (б) машин: 1 – сердечник ротора, 2 – обмотка возбуждения
В полюсных наконечниках синхронного двигателя (СД) с явнополюсным ротором размещают стержни пусковой обмотки (рисунок 6. 17), выполненной из латуни. Такую же обмотку из медных стержней применяют в синхронных генераторах, она называется демпферной (успокоительной), т.к. обеспечивает быстрое затухание колебаний ротора, возникающих в переходных режимах.
17), выполненной из латуни. Такую же обмотку из медных стержней применяют в синхронных генераторах, она называется демпферной (успокоительной), т.к. обеспечивает быстрое затухание колебаний ротора, возникающих в переходных режимах.
Рисунок 6.17 – Устройство пусковой обмотки в синхронных двигателях:
1 – полюсы ротора, 2 – короткозамыкающие кольца, 3 – стержни «беличьей клетки», 4 – полюсные наконечники
В зависимости от способа питания обмотки возбуждения различают системы независимого и самовозбуждения. В первом случае для питания обмотки возбуждения используют установленный на валу ротора СМ генератор постоянного тока, либо отдельный генератор, приводимый во вращение синхронным двигателем. При самовозбуждении питание обмотки возбуждения осуществляется через выпрямитель от обмотки якоря.
Характеристики синхронного генератора.
Основными характеристиками, определяющими свойства синхронного генератора, являются внешние и регулировочные.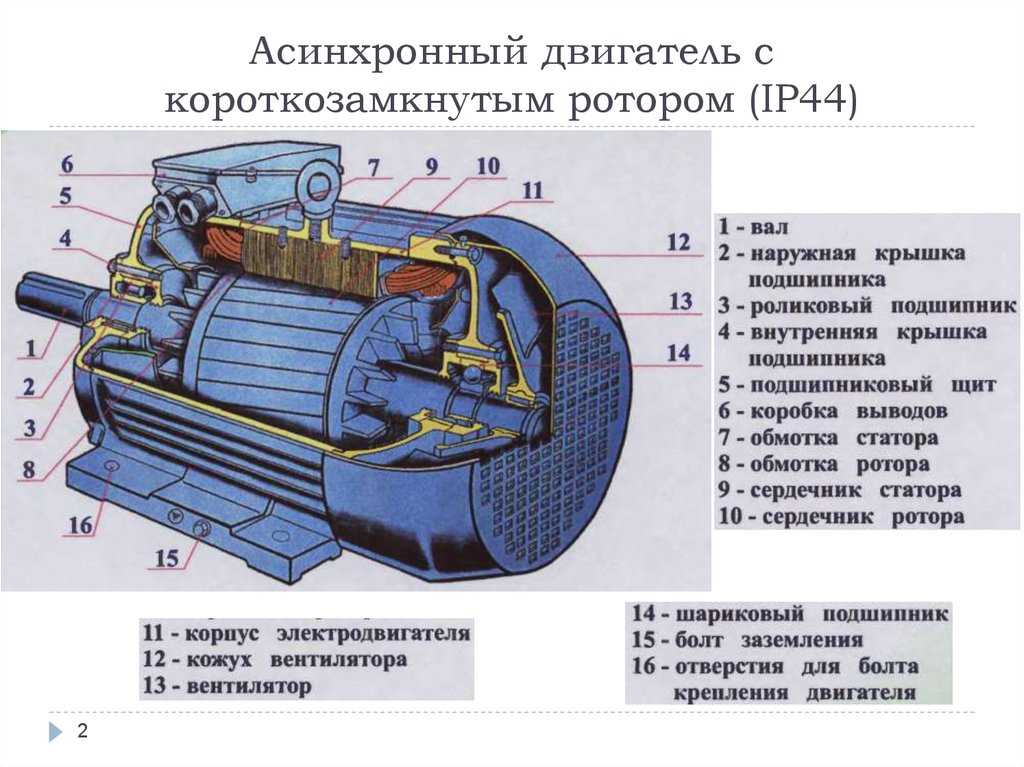
Внешние характеристики представляют собой зависимости напряжения U от тока нагрузки Iа. При этом неизменными остаются: ток возбуждения Iв, угол φ, частота f1 (постоянная частота вращения ротора n2). На рисунке 6.18 представлены внешние характеристики СГ при постоянном напряжении Uном для различных видов нагрузки. На рисунке ΔU представляет собой снижение напряжения при переходе от холостого хода к номинальному режиму.
Рисунок 6.18 – Внешние характеристики синхронного генератора при различных видах нагрузки
Регулировочные характеристики представляют собой зависимости тока возбуждения Iв от тока нагрузки Iа. При этом неизменными остаются: напряжение U, угол φ и частота f1 (рисунок 6.19). Данные характеристики демонстрируют, каким образом необходимо изменять ток возбуждения СГ, чтобы при изменении тока нагрузки напряжение оставалось неизменным. Очевидно, что при φ > 0 необходимо увеличивать ток возбуждения, а при φ < 0 – уменьшать его.
Очевидно, что при φ > 0 необходимо увеличивать ток возбуждения, а при φ < 0 – уменьшать его.
Рисунок 6.19 – Регулировочные характеристики синхронного генератора при различных видах нагрузки
Включение синхронных генераторов на параллельную работу с сетью.
На каждой электрической станции обычно бывает установлено несколько генераторов, которые включаются на параллельную работу в общую сеть. В современных энергосистемах на общую сеть, кроме того, работает целый ряд электростанций, и поэтому параллельно на общую сеть работает большое число синхронных генераторов. Благодаря этому достигается большая надежность энергоснабжения потребителей, снижение мощности аварийного н ремонтного резерва, возможность маневрирования энергоресурса ми сезонного характера и другие выгоды.
Все параллельно работающие генераторы должны отдавать в сеть ток одинаковой частоты. Поэтому они должны вращаться строго в такт, или, как говорят, синхронно.
Условия синхронизации генераторов.
При включении генераторов на параллельную работу с другими генераторами необходимо избегать чрезмерно большого толчка тока и возникновения ударных электромагнитных моментов и сил, способных вызвать повреждение генератора и другого оборудования, а также нарушить работу электрической сети или энергосистемы.
Поэтому необходимо отрегулировать надлежащим образом режим работы генератора на холостом ходу перед его включением на параллельную работу и в надлежащий момент времени включить генератор в сеть. Совокупность этих операций называется синхронизацией генератора.
Идеальные условия для включения генератора на параллельную работу достигаются при соблюдении следующих требований:
1) напряжение включаемого генератора U должно быть равно напряжению сети U или уже работающего генератора;
2) частота генератора f, должна равняться частоте сети;
3) чередование фаз генератора и сети должно быть одинаково;
4) напряжения UГ, и UС должны быть в фазе.
Синхронные двигатели и синхронные компенсаторы.
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cosφ = 1 и не потребляют при этом реактивной мощности из сети, а при работе с перевозбуждением даже отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Максимальный момент синхронного двигателя пропорционален U, а у асинхронного двигатели U2. Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность. Кроме того, использование возможности увеличения тока возбуждения синхронных двигателей позволяет увеличивать надежность их работы при аварийных понижениях напряжения в сети и улучшать в этих случаях условия работы энергосистемы в целом. Вследствие большого воздушного зазора добавочные потери в стали в клетке ротора синхронных двигателей меньше, чем АД, благодаря чему КПД синхронных двигателей обычно выше.
Вследствие большого воздушного зазора добавочные потери в стали в клетке ротора синхронных двигателей меньше, чем АД, благодаря чему КПД синхронных двигателей обычно выше.
С другой стороны, конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором. Пуск и регулирование скорости вращения синхронных двигателей также сложнее. Тем не менее, их целесообразно применять всюду, где не требуется частых пусков и остановок и регулирования скорости вращения.
Широко применяется асинхронный пуск синхронного двигателя, когда невозбужденная машина подключается к сети и ее скорость достигает почти синхронной скорости подобно асинхронному двигателю. Далее двигатель втягивается в синхронизм.
Рабочие характеристики СД представлены на рисунке 6. 20.
20.
Рисунок 6.20 – Рабочие характеристики синхронного двигателя
СД не имеет начального пускового момента. При подключении к сети СД с неподвижным ротором при наличии постоянного тока в обмотке возбуждения электромагнитный момент за один период изменит свое направление дважды. Следовательно, средний за период момент будет равен нулю. Т.к. ротор обладает некоторой инерцией, он не будет успевать разнонятся за пол периода до синхронной частоты вращения, т.е. двигатель не придет во вращение. Таким образом, для пуска синхронного двигателя необходимо помощью внешнего момента разогнать ротор до частоты вращения, близкой к синхронной.
Учитывая, что частота вращения СД равна , ее можно регулировать изменением числа полюсов или частоты напряжения питания. Первый способ в СД нецелесообразен. Это обусловлено тем, что необходимо изменять число полюсов и на статоре, и на роторе, что усложненяет конструкцию ротора. В связи с этим на практике используют второй способ.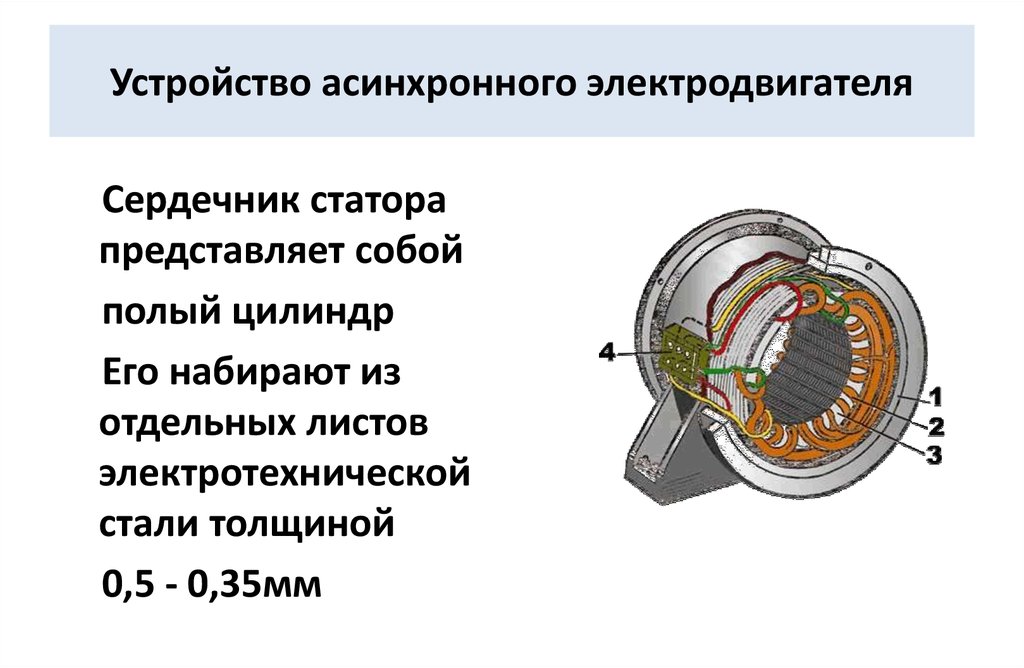
Синхронный двигатель, работающий на холостом ходу (без нагрузки), представляет собой синхронный компенсатор; при этом ток в обмотке якоря имеет практически только реактивную составляющую.
Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным является перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность. В связи с этим компенсаторы, как и служащие для этих же целей батареи конденсаторов, устанавливаемые на потребительских подстанциях, называют также генераторами реактивной мощности. Однако в периоды спада потребительских нагрузок (например, ночью) напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные падения напряжения. В этих случаях синхронные компенсаторы работают в недовозбужденном режиме, когда они потребляют из сети индуктивный ток и реактивную мощность.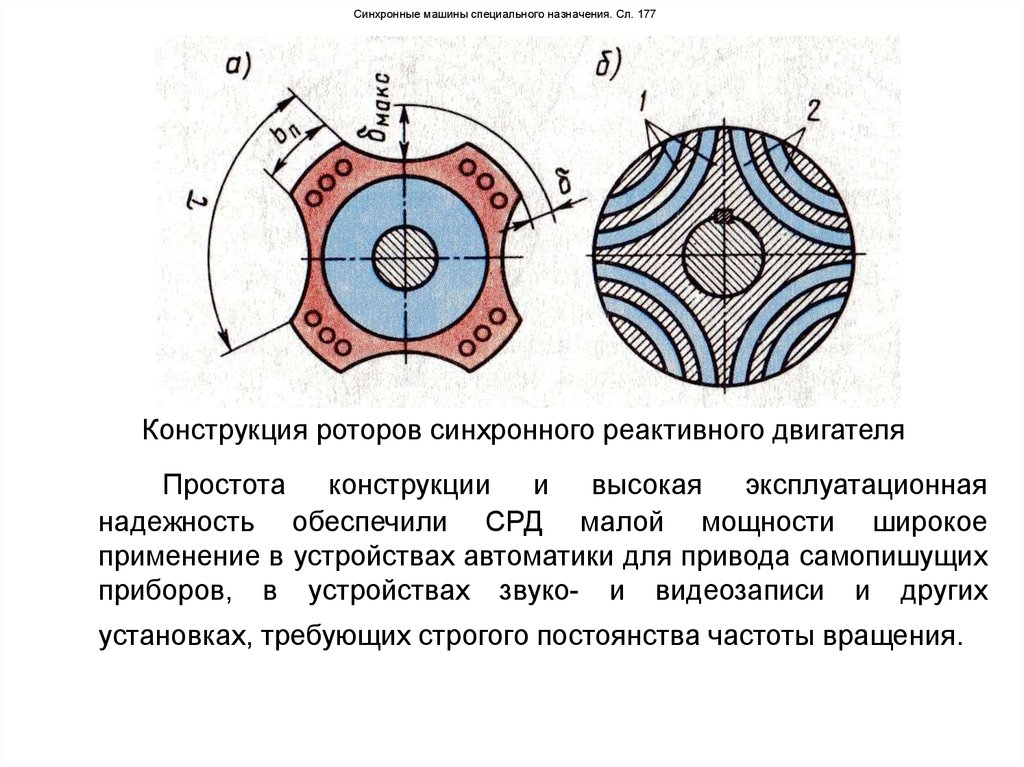 Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует его ток возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует его ток возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Выводы по лекции
К основным типам вращающихся машин относят асинхронные, синхронные и машины постоянного тока. Любая машина обратима, т.е. может работать как в режиме двигателя, так и в режиме генератора. Наиболее распространенными являются асинхронные двигатели с короткозамкнутым ротором. В случае необходимости необходимости частых пусков, плавного регулирования скорости вращения в широком диапазоне, используют двигатели постоянного тока. Синхронные компенсаторы, представляющие собой синхронные двигатели, работающие на холостом ходу, применяют для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения.
Вопросы для самопроверки
1 Поясните устройство асинхронной машины.
2 Поясните принцип действия асинхронного двигателя.
3 Что такое скольжение?
4 Назовите и изобразите графики известных вам характеристик асинхронного двигателя.
5. Какие способы пуска асинхронного двигателя вы знаете?
6 Какие существуют способы регулирования частоты вращения асихнонных двигателей? Кратко охарктеризуйте каждый из них.
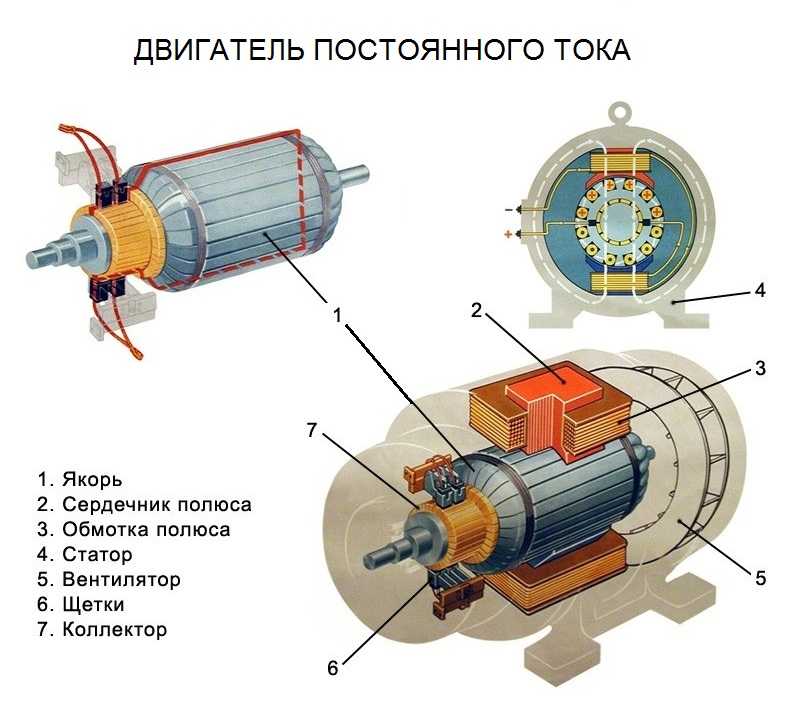
7 Перечислите основные элементы конструкции машины постоянного тока.
8 Поясните принцип действия машины постоянного тока?
9 Какие режимы работы машины постоянного тока вы знаете?
10 Как классифицируются генераторы постоянного тока по способу возбуждения?
11 Какие способы используют для пуска двигателя постоянного тока?
12 Перечислите способы регулирования частоты вращения двигателя постоянного тока. Поясните кратко каждый из них.
13. Назовите и изобразите графики известных вам характеристик двигателя постоянного тока.
14 Что называют коммутацией в машинах постоянного тока? Как ее улучшить?
15 Поясните устройство и принцип действия синхронной машины.
16 Назовите и изобразите графики известных вам характеристик синхронного генератора.
17 Перечислите требования для включения генератора на параллельную работу с сетью.
18 В чем заключаются преимущества и недостатки использования синхронного двигателя по сравнению с асинхронным?
Предыдущая234567891011121314151617Следующая
Электрические машины. Асинхронные двигатели (АД). Синхронные машины (СМ)
Другие предметы \ Электротехника
Страницы работы
7 страниц (Word-файл)
Посмотреть все страницы
Скачать файл
Содержание работы
Электрические машины
1. Асинхронные двигатели (АД)
Асинхронные двигатели (АД)
Устройство: СТАТОР – неподвижная часть, представляет цилиндрический магнито-провод, во внутренних пазах которого расположены три фазные обмотки, оси которых сдвинуты друг относительно друга на угол 120 градусов.
РОТОР – вращающаяся часть – цилиндрический магнитопровод, во внешних пазах которого расположена обмотка.
Магнитопровод асинхронного двигателя набирают из тонких листов электротехничес-
кой стали, изолированных лаком друг от друга, для уменьшения потерь на вихревые
токи.
Принцип работы АД основан на способности системы трёхфазных токов создавать вращающееся магнитное поле. При подключении обмоток статора к трёхфазной электрической сети по обмоткам статора протекают токи, отличающиеся по фазе на угол 120°, которые создают магнитное поле, вращающееся со скоростью
ω0(1)=2πf/p,1/с или частотой вращения n0(1) =60f/p,об/мин, (1)
где f – периодическая частота изменения тока (частота питающей сети), Гц;
p – число пар полюсов, сформированных обмоткой статора.
Фазные обмотки статора располагаются по окружности и их оси сдвинуты на угол 120 электрических градусов. Если каждая из обмоток занимает 1/3 окружности (оси обмоток сдвинуты на 120 геометрических градусов), они формируют одну пару полюсов (p=1). Если каждую фазную обмотку разделить на 2 секции и первые секции каждой обмотки укладывать через 120/2=60 геометрических градусов, а затем также укладывать вторые секции обмоток, каждая из обмоток будет занимать по1/3 окружности, но разнесёнными в пространстве секциями и они будут формировать две пары полюсов (p=2). Таким образом формируется любое число пар полюсов. При стандартной частоте питающей сети f=50Гц частота вращения поля в зависимости от числа пар полюсов составит Таблица 1
p | 1 | 2 | 3 | 4 | 5 | 6 | и т. |
n0(1),об/мин | 3000 | 1500 | 1000 | 750 | 600 | 500 | …… |
 д.
д.Вращающееся магнитное поле
пересекает с частотой n0(1) – n(2) =nS обмотки ротора,
в которых индуцируется ЭДС E2=сеФnS,
под действием которой по замкнутым обмоткам протекает ток I2= E2/(R2+jX2). При взаимодействии тока в обмотке ротора с магнитным
полем статора создаётся момент M=cФI2a. Ротор
двигателя начинает вращаться. Так как при n(2) =n0(1) пересечения полем
проводников обмотки ротора не будет, частота вращения ротора всегда n(2) <n0(1), поэтому двигатель называется асинхронным.
Ротор
двигателя начинает вращаться. Так как при n(2) =n0(1) пересечения полем
проводников обмотки ротора не будет, частота вращения ротора всегда n(2) <n0(1), поэтому двигатель называется асинхронным.
От разности скоростей ротора и поля статора зависит значение индуцируемой ЭДС, тока в обмотке ротора и развиваемого двигателем момента. Эту разность оценивают относительной величиной s=(n0(1) – n(2))/ n0(1), которую называют скольжением. При пуске двигателя n(2)=0 и s=1, в обмотке ротора возникают большие токи. В рабочем режиме скольжение изменяется от нуля до sкр=(0,15-0,2), сохраняется устойчивая работа двигателя при незначительном уменьшении скорости.
При номинальной нагрузке МН номинальное скольжение sн=0,02-0,10,
т. е. составляет несколько процентов, следовательно, и частота вращения
ротора будет отличаться от частоты вращения поля статора на
несколько процентов.
е. составляет несколько процентов, следовательно, и частота вращения
ротора будет отличаться от частоты вращения поля статора на
несколько процентов.
По конструкции ротора различают двигатели с короткозамкнутым (к.з.) ротором, обмотки которого выполнены из алюминия литыми в виде беличьей клетки, и с фазным ротором, трехфазная обмотка которого, соединенная обычно в звезду, подключена к трём изолированным друг от друга и от вала кольцам, закреплённым на валу. Через неподвижные щётки, контактирующие с вращающимися контактными кольцами, в цепь ротора обычно подключают реостат (или электронные устройства) с целью снижения пускового тока, повышения пускового момента, или регулирования скорости.
Механические свойства двигателей отображаются зависимостью n(M), которую называют механической характеристикой. На рис.1 приведены механические характеристики асинхронных двигателей с короткозамкнутым и фазным ротором.
Асинхронный двигатель с
короткозамкнутым ротором благодаря простоте и высокой надёжности получил самое
большое распространение, несмотря на ограниченный пусковой момент.
Рис.1
2.Синхронные машины (СМ).
Похожие материалы
Информация о работе
Скачать файл
Выбери свой ВУЗ
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им.
 Даля 166
Даля 166 - ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им. Дегтярева 174
- КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им. Макарова 543
- НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им. Герцена 123
- РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им. Гагарина 114
- СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им. Каразина 305
- ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
 Даля 166
Даля 166 Дегтярева 174
Дегтярева 174 Макарова 543
Макарова 543 Герцена 123
Герцена 123 Гагарина 114
Гагарина 114 Каразина 305
Каразина 305— где они используются?
Многие люди часто путаются в терминах «синхронные и асинхронные двигатели » и их точном назначении. Следующая информация описывает общие методы работы синхронных и асинхронных двигателей, их преимущества, их общее расположение и цели, которых может достичь каждый двигатель. Получить предложение.
Синхронный двигатель
Синхронные и асинхронные двигатели – как они работают
Синхронный двигатель
Это типичный синхронный двигатель переменного тока , способный генерировать синхронную скорость. В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, благодаря чему достигается синхронизация. Основной принцип работы заключается в том, что когда двигатель подключен к источнику питания, в обмотки статора протекает ток, который создает вращающееся электромагнитное поле. Он снова индуцируется в обмотках ротора, а затем начинает вращаться.
В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, благодаря чему достигается синхронизация. Основной принцип работы заключается в том, что когда двигатель подключен к источнику питания, в обмотки статора протекает ток, который создает вращающееся электромагнитное поле. Он снова индуцируется в обмотках ротора, а затем начинает вращаться.
Внешний источник питания постоянного тока требуется для блокировки направления и положения ротора относительно направления и положения статора. Из-за этой блокировки двигатели должны работать синхронно или вообще не работать.
Асинхронный двигатель
Принцип работы асинхронного двигателя почти такой же, как у синхронного двигателя, за исключением того, что асинхронный двигатель не подключен к внешнему возбудителю. Короче говоря, асинхронные двигатели (также называемые асинхронными двигателями) также работают по принципу электромагнитной индукции. В этом случае ротор не получает электрической энергии за счет проводимости, как двигатель постоянного тока.
Единственная проблема заключается в том, что к асинхронному двигателю не подключено внешнее устройство для отключения ротора, поэтому скорость вращения ротора зависит от меняющейся интенсивности магнитной индукции. Это изменяющееся электромагнитное поле заставляет ротор вращаться медленнее, чем магнитное поле статора. Поскольку скорость вращения ротора и скорость магнитного поля статора изменяются, эти двигатели называются асинхронными. Разница в скорости называется скольжением.
Синхронные и асинхронные двигатели – преимущества и недостатки
Синхронный двигатель работает с заданной частотой и постоянной скоростью независимо от нагрузки. Однако скорость асинхронного двигателя будет уменьшаться по мере увеличения нагрузки.
Синхронные двигатели могут работать с большими коэффициентами мощности, в том числе с запаздыванием и опережением, в то время как асинхронные двигатели всегда работают с запаздыванием p.f. Когда нагрузка уменьшается, отставание p.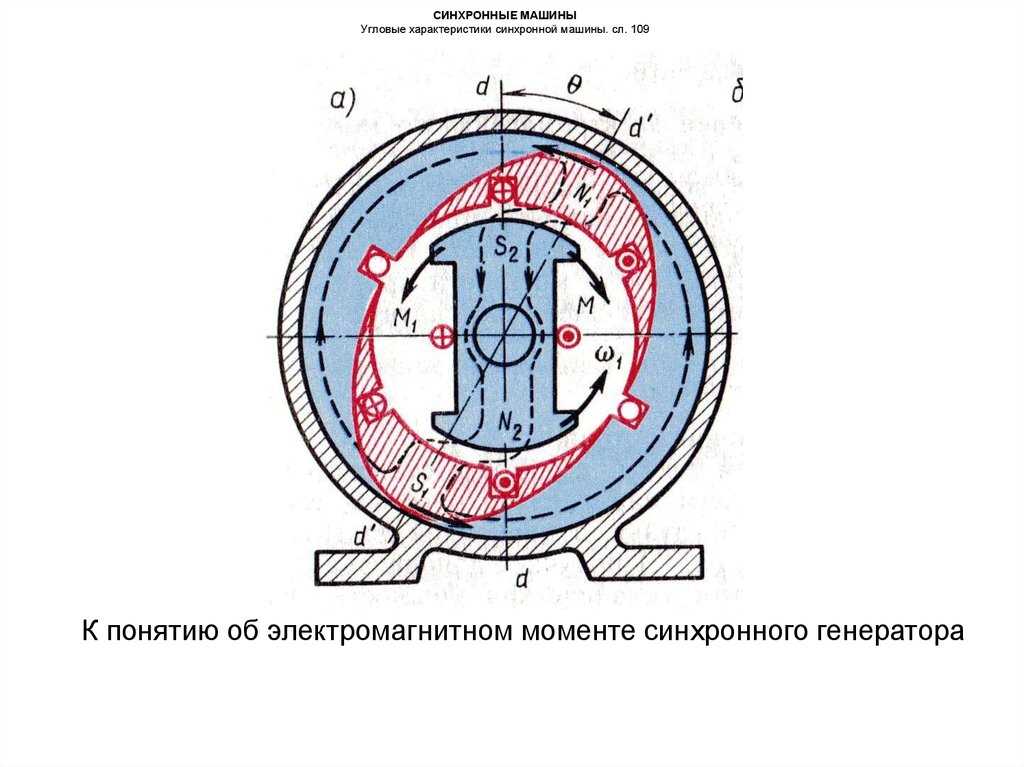 f может быть очень низким.
f может быть очень низким.
Синхронные двигатели не являются самозапускающимися, поскольку асинхронные двигатели могут запускаться самостоятельно.
Как и у асинхронного двигателя, на крутящий момент синхронного двигателя не влияют изменения напряжения.
Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель может работать без внешнего возбуждения.
Синхронные двигатели, как правило, дороже и сложнее, чем асинхронные двигатели, в то время как асинхронные двигатели дешевле и удобны в использовании.
Синхронные двигатели особенно подходят для низкоскоростных приводов, поскольку их коэффициент мощности всегда можно отрегулировать до 1,0, а их эффективность высока. С другой стороны, асинхронные двигатели подходят для скоростей выше 600 об/мин.
В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях благодаря использованию мощных электронных преобразователей, генерирующих очень низкие частоты. Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Применение синхронного двигателя
Обычно используются на электростанциях для получения надлежащего коэффициента мощности. Они работают параллельно с шиной и обычно перевозбуждаются извне для достижения требуемого коэффициента мощности.
Они также используются в обрабатывающей промышленности, где используется большое количество асинхронных двигателей и трансформаторов для решения проблемы отставания коэффициента мощности.
Используется на электростанциях для выработки электроэнергии требуемой частоты.
Используется для управления напряжением путем изменения возбуждения в линии передачи.
Применение асинхронного двигателя
Более 90% двигателей в мире являются асинхронными двигателями, и асинхронные двигатели широко используются в различных областях. Некоторые из них:
Центробежные вентиляторы, воздушные панели и насосы
компрессор
Конвейер
Подъемники и тяжелые краны
Lathe
ПЕТКЕТ, Текстильные и бумажные мельницы
В заключение
В коротких, использование синхронисты 4444. только когда больны. низкоскоростная или ультранизкоскоростная производительность и требуемый коэффициент мощности существует. Асинхронные двигатели в основном используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, лифты, шлифовальные машины и т. д.
только когда больны. низкоскоростная или ультранизкоскоростная производительность и требуемый коэффициент мощности существует. Асинхронные двигатели в основном используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, лифты, шлифовальные машины и т. д.
Мотор скольжения кольца
Большие синхронные двигатели
Трехфазный асинхронный мотор
Высокая эффективность. Предыдущий Следующий Идея производства электроэнергии заключается в том, что форма вращательной (кинетической) энергии преобразуется в электричество. Представьте себе паровую или ветряную турбину, лопасти которой прикреплены к вращающемуся валу. Машины переменного тока (в основном синхронные машины) преобразуют это вращение в трехфазное электричество . Есть два типа машин переменного тока : Давайте посмотрим, в чем самая большая разница. Прежде всего, что мы подразумеваем под «машинами»? Машины переменного тока основаны на принципе электромагнитной индукции . Их цель состоит в том, чтобы преобразовать энергию вращения в электрическую энергию и наоборот. Так, как синхронные, так и асинхронные машины могут использоваться как генераторы или двигатели . В случае простого синхронного генератора вращение первичного двигателя синхронизировано с синхронной скоростью (магнитным полем). Если турбина вращается 50 раз в секунду, выходное напряжение будет иметь частоту 50 Гц! (50 циклов в секунду) Асинхронные машины , также называемые «асинхронными машинами », немного отстают от синхронной скорости . Так, например, если наша турбина вращается 50 раз в секунду, асинхронная машина будет генерировать только 45 Гц. Мы увидим, почему в немного. Индукционные машины используются очень часто. У нас они есть на кухне, в вентиляторах или даже в системах кондиционирования воздуха. Они также широко используются в качестве трехфазных генераторов. Основная идея для асинхронных и синхронных машин очень похожа. Они состоят из 2 основных частей: Кроме того, имеются 3 важные детали: В случае генератора вращающийся вал (первичный двигатель в других названиях) крепится к турбине. Беличья клетка состоит из двух круглых пластин, соединенных стержнями . Затем эта клетка помещается внутрь статора. Статор является неподвижной частью машины. Это полый стальной сплав, который содержит 3-фазные проводники, свернутые в катушки. Рис. 1: Конструкция трехфазного асинхронного двигателя. Вращающееся магнитное поле индуцирует ток в стержнях беличьей клетки на основе закона электромагнитной индукции. Клетка начнет вращаться под действием силы Лоренца. Итак, эти машины могут быть либо генераторами, либо двигателями . Возьмем в качестве примера двигатель: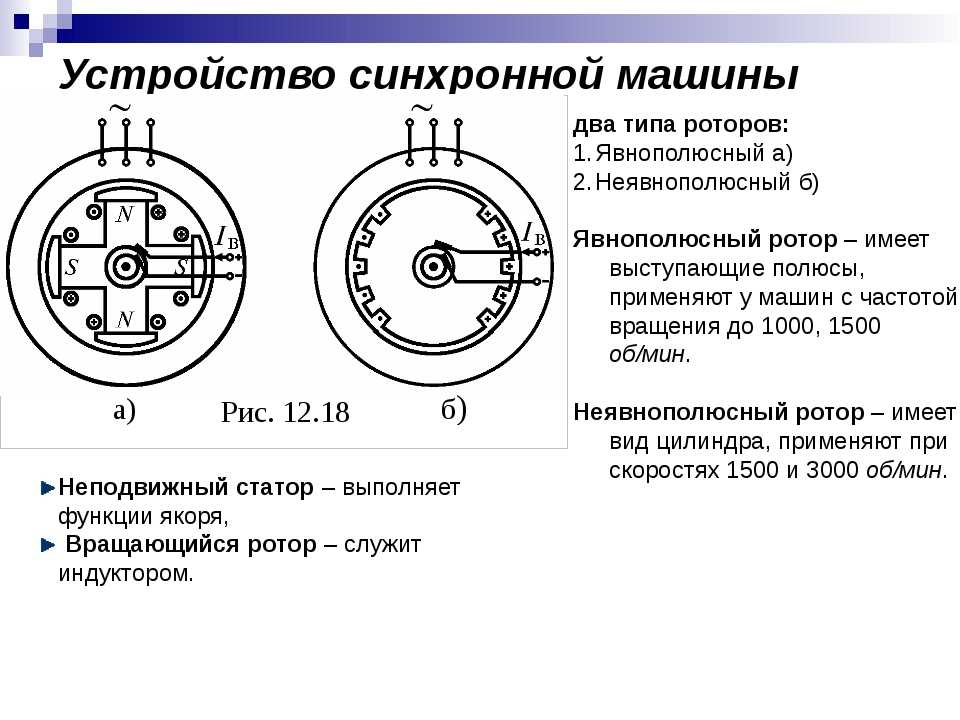
Синхронные и индукционные машины
Что означает «синхронный»?
 Они работают по более простому принципу и дешевле в производстве.
Они работают по более простому принципу и дешевле в производстве. Индукционные машины
Конструкция трехфазной индукционной машины
 Например, вода приводит в движение турбину и заставляет вращаться первичный двигатель. Затем его прикрепляют к беличьей клетке , которая также вращается.
Например, вода приводит в движение турбину и заставляет вращаться первичный двигатель. Затем его прикрепляют к беличьей клетке , которая также вращается. Асинхронные машины Принцип работы
 Подробнее о трехфазном режиме см. в этом разделе.
Подробнее о трехфазном режиме см. в этом разделе.
Правило правой руки
Рис. 2: Электроны, двигаясь по проводу, создают магнитное поле. Ток, представляющий собой поток «дырок» или, другими словами, отсутствие электронов, течет в противоположном направлении. Держите провод в руке. Ваш наш большой палец будет указывать на направление текущего потока. Остальные четыре пальца укажут направление магнитного поля. Это Правило правой руки.
Направление магнитного поля в одной фазе в статоре
Давайте изолируем одну фазу в статоре и посмотрим, как генерируется магнитное поле. Этот проводник скручен в катушку. Обратите внимание, у нас есть AC в проводнике, что означает ток, таким образом, магнитное поле также будет менять направление 50 раз в секунду:
Этот проводник скручен в катушку. Обратите внимание, у нас есть AC в проводнике, что означает ток, таким образом, магнитное поле также будет менять направление 50 раз в секунду:
Рисунок 3: На изображении показана одна фаза, изолированная в статоре 3 -фазный двигатель. На обмотку подается переменный ток. Ток будет индуцировать магнитное поле вокруг провода на основе правила правой руки, упомянутого выше. У нас есть катушка. Направление магнитного поля всегда идет с севера на юг, поэтому, обращаясь к линиям магнитного потока вне петли, мы можем нарисовать северный и южный полюса. Поскольку ток меняется, меняется и направление магнитного поля и полюсов. На изображении показаны два состояния тока и то, как он соответствующим образом меняет магнитные полюса.
- Используя правило правой руки , мы можем определить направление магнитного поля как для положительных, так и для отрицательных токов.
- Катушка с током в ней будет иметь северный и южный магнитные полюса. Магнитное поле всегда указывает с севера на юг (поле вне катушки).
 Магнитное поле всегда указывает с севера на юг (поле вне катушки).
Магнитное поле всегда указывает с севера на юг (поле вне катушки).- На приведенной выше диаграмме Северный и Южный полюса меняются местами 50 раз в секунду. Если мы добавим два других проводника, каждый из которых имеет 120 градусов друг от друга физически, общий эффект будет вращающимся магнитным полем .
Ток и магнитное поле в беличьей клетке асинхронного двигателя
Теперь у нас есть вращающееся магнитное поле в статоре, которое находится вокруг беличьей клетки. Это вращающееся магнитное поле индуцирует ток в стержнях беличьей клетки на основе электромагнитной индукции .
Рис. 4: Беличья клетка (часть ротора) в асинхронном двигателе. Клетка имеет вращающееся поле вокруг (от трехфазных обмоток статора). Обратите внимание, внутри клетки он движется в другом направлении, чем снаружи (синие стрелки). Мы определяем северный и южный полюса на основе направления магнитного поля вне клетки. Таким образом, мы можем нарисовать северный и южный полюса. Направление поля всегда указывает с севера на юг. Это поле индуцирует ток в стержнях. По мере вращения северного и южного полюсов направление тока будет меняться в каждом баре. Но сам наведенный ток в каждом стержне будет иметь свое магнитное поле, которое будет отталкивать поле статора, тем самым создавая силу. Эта сила заставит клетку вращаться.
Таким образом, мы можем нарисовать северный и южный полюса. Направление поля всегда указывает с севера на юг. Это поле индуцирует ток в стержнях. По мере вращения северного и южного полюсов направление тока будет меняться в каждом баре. Но сам наведенный ток в каждом стержне будет иметь свое магнитное поле, которое будет отталкивать поле статора, тем самым создавая силу. Эта сила заставит клетку вращаться.
- Направление тока в стержнях клетки будет меняться в зависимости от вращающегося магнитного поля. Почему? Потому что изначально клетка статична, и все, что видит конкретный стержень, — это постоянно меняющиеся северный и южный полюса (от ротора).
Это удобный инструмент для определения направления тока в конкретном баре в заданной точке. Возьмем пример, который у нас есть на картинке.
Рис. 5: Правило правой руки Флеминга. Закон электромагнитной индукции гласит, что если проводник находится в переменном магнитном поле, в нем будет индуцироваться электродвижущая сила. Если проводник является частью замкнутой цепи, эта сила будет двигать электроны и будет течь ток. Рука помогает нам определить поток тока на основе направления движущегося магнитного поля (куда указывают стрелки) и движения (куда оно движется).
Если проводник является частью замкнутой цепи, эта сила будет двигать электроны и будет течь ток. Рука помогает нам определить поток тока на основе направления движущегося магнитного поля (куда указывают стрелки) и движения (куда оно движется).
Сила Лоренца
Итак, теперь у нас есть Переменный ток в беличьей клетке баров . Хотя, когда в проводе (или в нашем случае стержне) есть ток, ток сам будет индуцировать магнитное поле. Это магнитное поле будет взаимодействовать с трехфазным вращающимся полем, и в результате появится сила, которая начнет вращать беличью клетку. Это называется Lorentz Force . Это связано с тем, что оба магнитных поля направлены в одном направлении и будут отталкивать друг друга.
Рис. 6: Правило силы Лоренца правой руки. Протяни руку. Большой палец показывает направление тока, а остальные — направление магнитного поля. Сила Лоренца будет символизирована стрелой, выходящей из вашей ладони.
- Вот хорошее видео на YouTube, которое визуализирует силу Лоренца в действии.
Почему индукционные машины отстают?
Это очень просто. Мы говорили, что ток в стержнях возникает из-за постоянно вращающегося вокруг магнитного поля. Теперь, если беличья клетка (ротор) начинает вращаться, в конце концов она догоняет синхронную скорость (магнитное поле ротора).
Но в этом случае больше нет вращающегося магнитного поля вокруг стержней, так как они движутся с той же скоростью. Итак, нет тока, нет силы. Это приводит к торможению ротора. Но эй, как только ротор замедляется, кажется, что магнитное поле снова вращается, и мы начинаем весь процесс с самого начала.
Это происходит так быстро, что в реальной жизни мы видим, что машина вращается немного медленнее, чем синхронная скорость.
Запуск асинхронного двигателя
Когда асинхронный двигатель подключен к трехфазной сети, магнитное поле мгновенно начинает вращаться. Ротор остался. Это означает, что вращающееся магнитное поле будет очень быстрым по сравнению со стационарной клеткой и будет генерировать огромный начальный ток.
Так как между клеткой и обмотками статора происходит что-то вроде трансформатора, этот бросок тока также отразится на потреблении огромного тока от трехфазной сети. И может привести к падению напряжения в сети, отнимая ток от других устройств.
Чтобы решить эту проблему, мы используем метод Starter-Delta Starter . Первоначально двигатель подключается по схеме «звезда», где фазное напряжение меньше линейного напряжения, затем, когда двигатель работает, он переключается на конфигурацию «треугольник».
Чтобы узнать больше о конфигурации Star & Delta, ознакомьтесь с предыдущим постом.
Кроме того, вот хорошее видео, в котором больше рассказывается о стартере Star & Delta.
Рис. 7: Соединение звездой и треугольником трехфазного двигателя.
Принцип работы асинхронных генераторов
Итак, мы рассмотрели, как работают асинхронные двигатели. Мы также знаем, что скорость вращения вала будет немного отставать от синхронной скорости . Это называется промах .
Это называется промах .
Теперь давайте присоединим этот вал к турбине, которая будет генерировать вращение быстрее синхронной скорости. Скольжение будет отрицательным, и ток будет генерироваться в противоположном направлении, а это означает, что электроны будут течь обратно в источник питания.
Синхронные машины
Синхронные машины аналогичны индукционным машинам. Идея состоит в том, что на этот раз вращающийся вал (
первичный двигатель ) прикреплен к электромагниту постоянного тока.Магниту нужна энергия. К стойке прикреплены так называемые контактные кольца . Они подключаются к внешнему источнику питания через щетки. Это потому, что ротор, таким образом, эти контактные кольца вращаются, и единственный способ подачи электричества в них — через щетки. Щетки касаются только колец.
Рис. 8: Конструкция синхронного двигателя. Ток поступает через 3 фазы, и поскольку это переменный ток, он создает вращающееся магнитное поле в статоре. 2-полюсный электромагнит постоянного тока на схеме имеет фиксированные полюса N и S, и они синхронизируются с вращающимися полюсами N и S трехфазного магнитного поля. Поскольку электромагнит постоянного тока трудно зафиксировать на быстро вращающемся поле статора, для придания начального вращения ротору используется короткозамкнутая клетка. Это работает по тому же принципу, что и в асинхронных двигателях.
2-полюсный электромагнит постоянного тока на схеме имеет фиксированные полюса N и S, и они синхронизируются с вращающимися полюсами N и S трехфазного магнитного поля. Поскольку электромагнит постоянного тока трудно зафиксировать на быстро вращающемся поле статора, для придания начального вращения ротору используется короткозамкнутая клетка. Это работает по тому же принципу, что и в асинхронных двигателях.
Синхронные машины (двигатели) Принцип работы
Мы уже знаем, что в статоре имеется вращающееся магнитное поле . Так, в случае с синхронными двигателями вместо создания силы Лоренца мы блокируем полюса электромагнита постоянного тока статора вращающимся трехфазным полем . Это означает, например, что северный полюс электромагнита будет притягивать южный полюс вращающегося магнитного поля.
Звучит просто, но когда двигатель запускается, магнитное поле вокруг электромагнита постоянного тока очень быстро меняется, поэтому оно притягивается, а затем отталкивается. Нам нужно что-то, что изначально даст толчок ротору, чтобы он начал вращаться, чтобы он мог зафиксироваться на трехфазном поле.
Нам нужно что-то, что изначально даст толчок ротору, чтобы он начал вращаться, чтобы он мог зафиксироваться на трехфазном поле.
У нас уже есть отличный инструмент для этого: беличья клетка !
Хитрость заключается в том, чтобы сначала отсоединить токосъемные кольца, когда клетка находится в действии, а затем, когда ротор вращается, мы соединим их обратно, и поля заблокируются.
Ротор с явно выраженными полюсами для синхронных машин (генераторов)
Синхронный двигатель, работающий в обратном направлении, работает как генератор. По количеству полюсов ротора различают:
- Цилиндрический полюсный ротор – 2 полюса
- Ротор с явно выраженными полюсами – 4+ полюса
В приведенном выше примере у нас был электромагнит в качестве ротора, который имел северный и южный полюса (2 полюса). По сути, это катушка, в которой вы начинаете наматывать провод на одном конце и заканчиваете на другом.
По сути, это катушка, в которой вы начинаете наматывать провод на одном конце и заканчиваете на другом.
Что, если бы мы использовали тот же провод, но вместо этого обернули его вокруг 4 полюсов? У нас получится что-то вроде этого:
Рис. 9: 4-полюсный ротор трехфазного синхронного генератора. Это электромагнит постоянного тока. Электроэнергия подается от щеток к контактным кольцам. Обычно у соленоида (катушки) один конец — N, а другой — S с углом между ними 180°. В 4-полюсном сценарии северный и южный полюса меняются каждые 90°.
Теперь вместо Северного и Южного полюса у нас есть по два каждого . Если мы посмотрим на ротор под одним определенным углом, скажем, сверху, то на один полный оборот на 360º мы получим изменение между N и S происходит 4 раза . Север-Юг-Север-Юг.
Итак, в сценарии с 2 полюсами ротор вращается 50 раз в секунду для выработки электроэнергии с частотой 50 Гц.
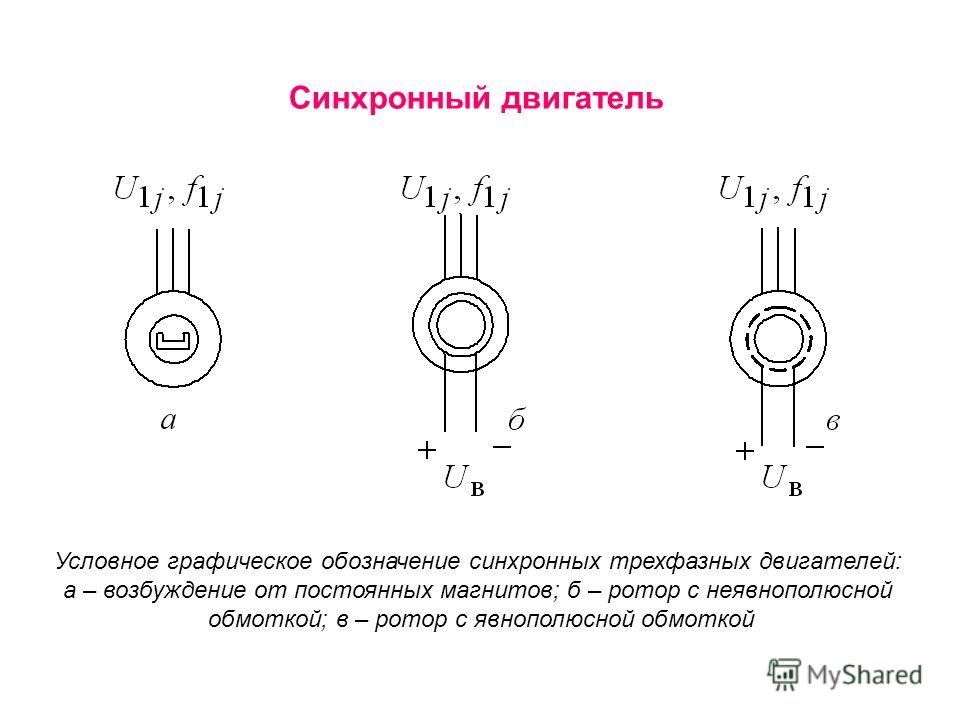 В случае 4-полюсной установки ротору нужно только повернуть 25 раз , чтобы получить те же 50 Гц. Тем не менее, изменение магнитного поля (синхронная скорость) все равно будет 50 раз/с.
В случае 4-полюсной установки ротору нужно только повернуть 25 раз , чтобы получить те же 50 Гц. Тем не менее, изменение магнитного поля (синхронная скорость) все равно будет 50 раз/с.Подумайте об этом, таким образом, ротору не нужно вращаться с сумасшедшей скоростью. 901:20 У нас может быть даже больше шестов. Следующее соотношение используется для расчета синхронной скорости (магнитное поле в статоре) в об/мин в случаях, когда используется явнополюсный ротор:
Где:
- )
- P: количество полюсов
- f: частота
2-полюсный ротор против 4-полюсного в 3-фазной синхронной машине (генераторе)
Рисунок 10: Разница между машиной с 2-полюсным ротором, 3-полюсным статором и машиной с 4-полюсным ротором, 6-полюсным статором.
Слева мы видим самый упрощенный сценарий: 2-х полюсный ротор и 3-х полюсный статор . У нас есть 3-фазный переменный ток в статоре. Цвета обозначают каждую фазу. Направление тока обычно обозначается стрелкой , поэтому X означает, что он входит в страницу, а точка означает, что он выходит. По сути, у нас есть катушка, обернутая вокруг ротора. Хотя в реале это больше похоже на рис. 6.
У нас есть 3-фазный переменный ток в статоре. Цвета обозначают каждую фазу. Направление тока обычно обозначается стрелкой , поэтому X означает, что он входит в страницу, а точка означает, что он выходит. По сути, у нас есть катушка, обернутая вокруг ротора. Хотя в реале это больше похоже на рис. 6.
Справа у нас 4-полюсный ротор с 6-полюсным статором. Как упоминалось ранее, в случае генератора ротор необходимо вращать с половинной скоростью, чтобы генерировать ту же частоту, что и в установке с 2-полюсным ротором.
Зачем нужен 6-полюсный статор? На первом рисунке одна сторона ротора N , а другая S. В 4-полюсном корпусе противоположная сторона северного полюса является другим северным полюсом . Левая картинка: N указывает на X , S указывает на •. Изображение справа: оба N указывают на X и оба S на •. Не забывайте, это один провод. Мы не можем допустить, чтобы два полюса N посылали электроны друг против друга.
Рис. 11: Различия между 3-полюсной и 6-полюсной обмоткой статора. Когда у нас есть полюс того же типа на противоположной стороне, две стороны подключены не в фазе. Итак, провод идет снаружи-вовнутрь, а с противоположной стороны — наизнанку. Поворот тоже в обратную сторону. Это заставляет токи течь в разных направлениях. Используйте правило правой руки, чтобы увидеть магнитное поле. Для северных полюсов. поле указывает снаружи внутрь. Не забывайте, магнитное поле движется по петле, но мы рассматриваем стрелки, которые находятся вне полюса.
Поиск:
…. Оставайтесь в игре….
Продолжайте в том же духе и получайте уведомления, когда появится что-то новое!
Перейти к началу
Элементы асинхронного двигателя, Элементы синхронного двигателя, Устройство измерения положения ротора RPS
На этом веб-сайте представлен краткий обзор электрических машины, используемые в качестве высокоскоростных двигателей и генераторов, их преимущества и некоторые поля приложения. Кроме того, проблемы разработки и
объясняется производство высокоскоростных двигателей и генераторов. С е+а
находится в Швейцарии, есть компетентный партнер с более чем 28-летним стажем
опыта в разработке и производстве индивидуальных асинхронных и
элементы синхронных высокоскоростных двигателей для различных областей применения.
Кроме того, проблемы разработки и
объясняется производство высокоскоростных двигателей и генераторов. С е+а
находится в Швейцарии, есть компетентный партнер с более чем 28-летним стажем
опыта в разработке и производстве индивидуальных асинхронных и
элементы синхронных высокоскоростных двигателей для различных областей применения. Введение
Различные требования фактически приводят к растущему спросу на высокоскоростные
моторы. Прежде всего, постоянная потребность в повышенной удельной мощности.
Из-за квазилинейной зависимости между частотой вращения и мощностью на валу
электрической машины, увеличение номинальной скорости является эффективным способом
повысить удельную мощность и эффективность. Следовательно, этот подход использует преимущества
увеличение мощности на валу без изменения размеров машины. На
с другой стороны, та же производительность может быть обеспечена в меньшем объеме.
последнее имеет первостепенное значение, например, в области станкостроения. При этом шпиндели или станок в целом становятся меньше, вес меньше.
уменьшается, а динамическое поведение усиливается. Еще один момент в этой отрасли
это время цикла, которое требуется станку для выполнения определенного
операция. Чем быстрее инструмент можно перемещать и вращать, тем быстрее он может
выполнить свою задачу, не принимая во внимание, что высокая скорость резки
операции полагаются на максимальную скорость, чтобы эффективно обрабатывать соответствующие детали.
При этом шпиндели или станок в целом становятся меньше, вес меньше.
уменьшается, а динамическое поведение усиливается. Еще один момент в этой отрасли
это время цикла, которое требуется станку для выполнения определенного
операция. Чем быстрее инструмент можно перемещать и вращать, тем быстрее он может
выполнить свою задачу, не принимая во внимание, что высокая скорость резки
операции полагаются на максимальную скорость, чтобы эффективно обрабатывать соответствующие детали.
Другими интересными областями применения высокоскоростных двигателей являются приложения.
где стандартный редуктор используется для передачи скорости вращения
двигатели с приводом от обычной частоты электросети (50/60 Гц) на более высокую скорость
уровни. Замена этой коробки передач и соответствующего обычного двигателя
с приводом с регулируемой скоростью, состоящим из высокоскоростного двигателя и
выпрямитель повышает общий КПД и снижает затраты на техническое обслуживание
существенно.
Компрессорная промышленность является примером, где высокая эффективность, безмасляная
Работа и отсутствие выбросов делают электрические высокоскоростные двигатели наиболее
экологически чистые приводы компрессоров.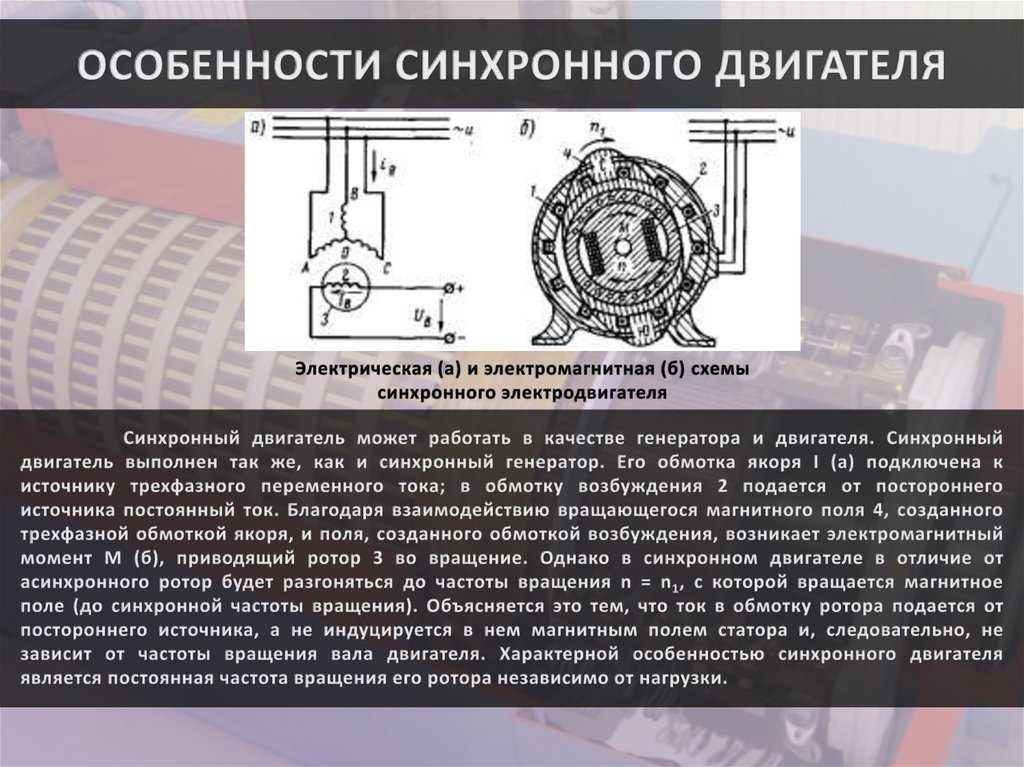 В контексте отсутствия выбросов
Применение систем накопления энергии с высокоскоростными маховиками не только занимает
Преимущество высокоскоростных генераторов. Таким образом, ископаемые генераторы с нежелательными
можно избежать выбросов и значительно снизить затраты на техническое обслуживание.
Крио-приложения на самом деле переживают очень похожую революцию своего привода.
технологии. Элементы двигателя с прямым приводом заменяют комплект из редуктора и
Стандартный двигатель 50/60 Гц. Эффективность может быть увеличена, необходимое пространство
значительно уменьшены размеры и затраты на техническое обслуживание. Следовательно, рекуперация энергии
системы становятся все более интересными с финансовой и
экологическая точка зрения. Таким образом, элементы высокоскоростного двигателя частично способствуют
к постоянному развитию приложений зеленой энергии.
В контексте отсутствия выбросов
Применение систем накопления энергии с высокоскоростными маховиками не только занимает
Преимущество высокоскоростных генераторов. Таким образом, ископаемые генераторы с нежелательными
можно избежать выбросов и значительно снизить затраты на техническое обслуживание.
Крио-приложения на самом деле переживают очень похожую революцию своего привода.
технологии. Элементы двигателя с прямым приводом заменяют комплект из редуктора и
Стандартный двигатель 50/60 Гц. Эффективность может быть увеличена, необходимое пространство
значительно уменьшены размеры и затраты на техническое обслуживание. Следовательно, рекуперация энергии
системы становятся все более интересными с финансовой и
экологическая точка зрения. Таким образом, элементы высокоскоростного двигателя частично способствуют
к постоянному развитию приложений зеленой энергии.
Вызовы
Упомянутое преимущество высокоскоростных двигателей может быть достигнуто только при использовании
высококачественные элементы двигателя. Причина этого в том, что из-за высокого
скорости вращения, центробежные силы на вращающейся части двигателя (ротор)
может быть очень высоким, приводя материалы к грани механического напряжения
удельное сопротивление. Отказы в элементах двигателя могут привести к авариям, влияющим на
окружающей среды или, по крайней мере, повредить шпиндель, в который встроен двигатель.
предотвратить это, различные физические аспекты должны быть рассчитаны в
сложный процесс разработки, принимая электромагнитные, тепловые, механические
стресс и структурные динамические аспекты во внимание. Прикладная вычислительная
методы должны быть объединены с многолетним опытом, чтобы расширить фактические
эксплуатационные ограничения с учетом безопасности как наивысшего приоритета.
Кроме того, взаимодействие выпрямителя и высокоскоростного двигателя требует
следует знать, потому что выпрямитель сильно влияет на нагрев, шум,
засорение и энергопотребление машины. Особенно взаимодействие
различных преобразовательных систем с элементом высокоскоростного двигателя требует очень
конкретные знания и опыт.
Причина этого в том, что из-за высокого
скорости вращения, центробежные силы на вращающейся части двигателя (ротор)
может быть очень высоким, приводя материалы к грани механического напряжения
удельное сопротивление. Отказы в элементах двигателя могут привести к авариям, влияющим на
окружающей среды или, по крайней мере, повредить шпиндель, в который встроен двигатель.
предотвратить это, различные физические аспекты должны быть рассчитаны в
сложный процесс разработки, принимая электромагнитные, тепловые, механические
стресс и структурные динамические аспекты во внимание. Прикладная вычислительная
методы должны быть объединены с многолетним опытом, чтобы расширить фактические
эксплуатационные ограничения с учетом безопасности как наивысшего приоритета.
Кроме того, взаимодействие выпрямителя и высокоскоростного двигателя требует
следует знать, потому что выпрямитель сильно влияет на нагрев, шум,
засорение и энергопотребление машины. Особенно взаимодействие
различных преобразовательных систем с элементом высокоскоростного двигателя требует очень
конкретные знания и опыт. Следовательно, тесты вышеописанного
приложения имеют решающее значение для успеха. Они требуют интенсивного отношения
между специалистами по силовой электронике и высокоскоростным двигателям. более того
Инфраструктура, позволяющая проводить тесты производительности, очень сложна и обычно
нет в наличии на рынке. Очень часто связанные с этим расходы значительно превышают
затраты, понесенные в течение всего процесса разработки нового элемента двигателя
продуктовая линейка.
Следовательно, тесты вышеописанного
приложения имеют решающее значение для успеха. Они требуют интенсивного отношения
между специалистами по силовой электронике и высокоскоростным двигателям. более того
Инфраструктура, позволяющая проводить тесты производительности, очень сложна и обычно
нет в наличии на рынке. Очень часто связанные с этим расходы значительно превышают
затраты, понесенные в течение всего процесса разработки нового элемента двигателя
продуктовая линейка.
Инвертор
Типичные инверторы работают на основе метода широкоимпульсной модуляции,
где непрерывное переключение напряжения или тока управляет выходом
форма волны. Из-за потребности в более быстрых высокоскоростных двигателях
частота также увеличивается (в современных инверторах используются IGBT). Несмотря на то что
шум и эффективность улучшаются по мере увеличения количества импульсов, инвертор
приводит также к нескольким недостаткам, особенно из-за быстрого переключения
переходные процессы, которые можно рассматривать как значительный источник паразитных потерь. Дополнительные временные гармоники, вызванные импульсным инвертором, имеют отрицательное значение.
влияние на распределение потока в воздушном зазоре. Эти гармоники вызывают дополнительные
потери на вихревые токи в элементах двигателя, особенно в роторе, которые
привести к более высоким температурам и возможному ухудшению механического
поведение. Частота переключения оказывает еще одно влияние на высокую скорость.
двигателя, а именно на изоляцию, которая сильно нагружена
повторяемость и крутизна фронта пульсовой волны. Когда используются IGBT,
высокая скорость нарастания напряжения, обычно от 0 до 650 В менее чем за 0,1 мкс
приводит примерно к 10 000 В/мкс. Этот факт приводит к неблагоприятным последствиям для
изоляция двигателя. Эти крутые нарастающие и падающие импульсы приводят к
неравномерное распределение напряжения внутри двигателя, особенно во время
переключения переходов. Без глубоких знаний по изоляции двигателя
системы и самого инвертора ухудшение изоляции и последующее
может произойти отказ двигателя.
Дополнительные временные гармоники, вызванные импульсным инвертором, имеют отрицательное значение.
влияние на распределение потока в воздушном зазоре. Эти гармоники вызывают дополнительные
потери на вихревые токи в элементах двигателя, особенно в роторе, которые
привести к более высоким температурам и возможному ухудшению механического
поведение. Частота переключения оказывает еще одно влияние на высокую скорость.
двигателя, а именно на изоляцию, которая сильно нагружена
повторяемость и крутизна фронта пульсовой волны. Когда используются IGBT,
высокая скорость нарастания напряжения, обычно от 0 до 650 В менее чем за 0,1 мкс
приводит примерно к 10 000 В/мкс. Этот факт приводит к неблагоприятным последствиям для
изоляция двигателя. Эти крутые нарастающие и падающие импульсы приводят к
неравномерное распределение напряжения внутри двигателя, особенно во время
переключения переходов. Без глубоких знаний по изоляции двигателя
системы и самого инвертора ухудшение изоляции и последующее
может произойти отказ двигателя. В этом контексте эффекты частичного разряда
и перегрев ротора являются хорошо известными источниками отказов. Последний может привести
к нежелательному разрыву углеродного волокна из-за термического механического напряжения в
соответствующая смола из углеродного волокна (синхронные машины).
В этом контексте эффекты частичного разряда
и перегрев ротора являются хорошо известными источниками отказов. Последний может привести
к нежелательному разрыву углеродного волокна из-за термического механического напряжения в
соответствующая смола из углеродного волокна (синхронные машины).
Заключение
Асинхронные и синхронные высокоскоростные двигатели имеют ряд преимуществ, таких как:
уменьшенное пространство для установки большей мощности и ненужных коробок передач.
Эти преимущества применимы для нескольких областей и интенсивно используются в
станкостроение, компрессор, крио и энергетическая промышленность, например.
Разработка и производство этих асинхронных и синхронных высокоскоростных двигателей
увлекательная задача, где можно использовать самые современные вычислительные методы
для процесса разработки так же важен, как и широкий спектр опыта
и опыт для безопасного расширения фактических эксплуатационных ограничений. Не только
знание высокоскоростных двигателей необходимо, но также и глубоко внутри
инверторная технология, явление частичного разряда и так называемые паразитные или
дополнительные потери.
e+a в Швейцарии предлагает широкий ассортимент высокоскоростных двигателей или генераторы соответственно. Обладая более чем 28-летним опытом и более чем 150 000 различных высокоскоростных асинхронных машин и постоянных магнитов синхронных машин, компания e+a является одним из мировых лидеров в разработке и производство высокоскоростных двигателей по индивидуальным заказам. Кроме того, профессионально оборудованный испытательный стенд со всеми новейшими инверторами и частичным система испытаний разряда позволяет провести детальный анализ и адаптацию выпрямителя и двигатель и очень хорошая поддержка для системных интеграторов.
Синхронный генератор | bartleby
Что такое синхронный генератор?
По сравнению с асинхронным генератором это машина, в которой скорость вращения ротора равна вращающемуся магнитному полю, создаваемому статором, т. е. механическая скорость равна электрической скорости, поэтому называется синхронной, а не асинхронной.
Это машина с двойным возбуждением, которая производит переменное напряжение и ток.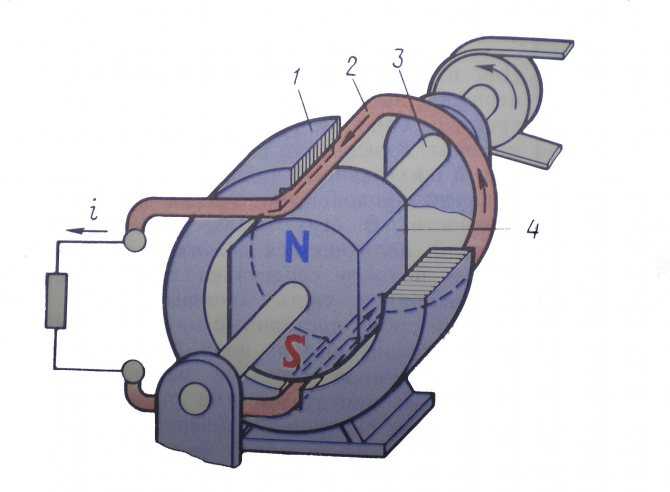 Поскольку эта машина является самой громоздкой из всех электрических машин, на статоре размещена обмотка якоря, а на роторе — обмотка возбуждения.
Поскольку эта машина является самой громоздкой из всех электрических машин, на статоре размещена обмотка якоря, а на роторе — обмотка возбуждения.
Почему большая часть электроэнергии вырабатывается с помощью синхронного генератора?
Синхронный генератор способен выдавать активную и реактивную мощность. Если он выдает реактивную мощность, она может быть поглощена нагрузкой. Асинхронные генераторы этого не делают.
Мы также можем контролировать коэффициент мощности синхронного генератора, управляя возбуждением магнитного поля, что невозможно для асинхронного генератора.
Синхронный генератор вырабатывает мощность на фиксированной частоте, поскольку синусоиды разных частот ортогональны друг другу и передают нулевые потери мощности.
Структура синхронного генератора
Конструкция статора изготовлена из CRGO (холоднокатаной ориентированной по зерну) стали и ламинирована для уменьшения потерь на вихревые токи. Он состоит из короткого шага и распределенной обмотки. Преимущество распределенной намотки в том, что вес распределяется равномерно. Преимущество короткого шага заключается в том, что доминирующие гармоники можно устранить, выбрав подходящее значение угла хорды. Поскольку длина катушки уменьшается, ее сопротивление и реактивность также уменьшаются, что приводит к уменьшению падения напряжения, что улучшает регулирование напряжения.
Он состоит из короткого шага и распределенной обмотки. Преимущество распределенной намотки в том, что вес распределяется равномерно. Преимущество короткого шага заключается в том, что доминирующие гармоники можно устранить, выбрав подходящее значение угла хорды. Поскольку длина катушки уменьшается, ее сопротивление и реактивность также уменьшаются, что приводит к уменьшению падения напряжения, что улучшает регулирование напряжения.
Конструкция ротора в основном бывает двух типов: ротор с явно выраженными полюсами и ротор с неявнополюсными полюсами.
Ротор с явно выраженными полюсами синхронного генератора также известен как ротор с выступающими полюсами. Здесь полюса проецируются по периферии ротора. Воздушный зазор по периферии ротора неравномерный. Он может иметь максимум 120 полюсов. Поскольку вес распределен неравномерно, возникают центробежные силы, которые неравномерны и могут повредить ротор. Таким образом, этот тип ротора вращается с низкой скоростью, чтобы предотвратить механический дисбаланс.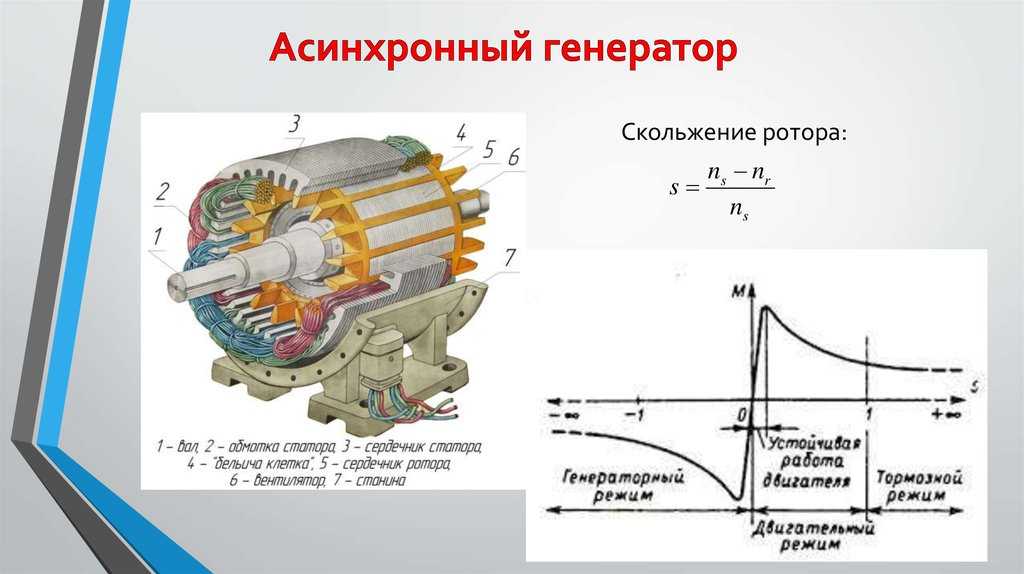 Эти роторы используются на гидроэлектростанциях.
Эти роторы используются на гидроэлектростанциях.
Неявнополюсный ротор также известен как цилиндрический ротор. По периметру ротора имеется равномерный воздушный зазор. Он намотан только на два или четыре полюса и хорошо сбалансирован механически, поэтому его можно вращать на более высоких скоростях.
Маркировка общественного достояния | https://picryl.com| TekniskamuseetПринцип действия синхронного генератора
Якорная обмотка синхронного генератора питается трехфазным переменным током, а обмотка возбуждения питается от источника постоянного тока.
Обмотка возбуждения постоянного тока создает ЭДС поля (электродвижущая сила), которая взаимодействует с ЭДС якоря для получения трехфазной мощности, т. е. трехфазного тока и напряжения.
Трехфазное высокое напряжение, генерируемое в обмотке якоря, не нужно выводить во внешнюю цепь через токосъемные кольца и скользящие контакты, но можно сделать прямое подключение к клеммам. По сравнению с асинхронным генератором низкое напряжение подается на поле через токосъемные кольца.
Синхронная скорость представляет собой преобразование электрической частоты в механическую скорость в оборотах в минуту.
Ns=120fP
Здесь Ns — синхронная скорость, f — частота, а P — количество полюсов.
Уравнение ЭДС синхронного генератора:
Erms=4,44fϕNs
Здесь f — частота, ϕ — поток на полюс, а Ns — синхронная скорость.
При вращении ротор перерезает проводник статора и наводит ЭДС, уравновешенную в трехфазной обмотке статора. Если статор питает нагрузку, эта ЭДС вызывает уравновешенный ток в обмотке статора. Этот ток создает rmf (вращающееся магнитное поле), которое вращается с синхронной скоростью.
CC Attribution-Share Alike 3.0 Unported | https://commons.wikimedia.org|DaweczМетоды устранения гармоник в синхронном генераторе
На стороне поля,
- с использованием выступающих полюсов со скошенными углами.
- наклон полюса поля для синусоидального изменения длины проводника.
- за счет увеличения воздушного зазора и сопротивления.

Со стороны якоря,
- короткой обмоткой.
- с использованием распределенной обмотки.
Регулирование напряжения в синхронном генераторе
Регулирование напряжения является важным параметром для синхронного генератора, поскольку более высокое регулирование напряжения означает более высокое синхронное сопротивление. Знание значения синхронного импеданса имеет решающее значение для определения распределения мощности при параллельной работе. Если нагрузка отключена или подключена от синхронного генератора, мы должны знать величину нарастания или падения напряжения соответственно.
Кроме того, он используется для разработки AVR (автоматического регулятора напряжения), системы автоматического управления, используемой для регулирования тока возбуждения.
Параллельная работа синхронного генератора
Параллельная работа генераторов переменного тока — это когда несколько генераторов переменного тока подключены параллельно для удовлетворения огромного спроса на мощность, поскольку один генератор переменного тока не может обеспечить такое количество энергии.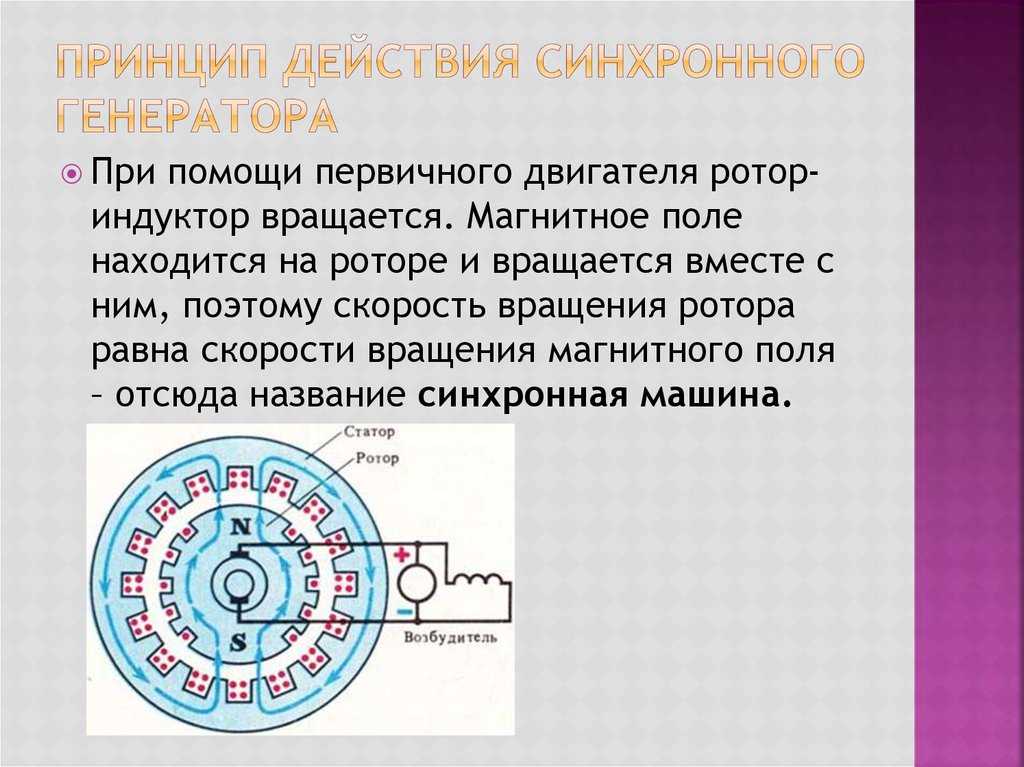
Предположим, мы заменяем один большой блок большим количеством маленьких блоков. В этом случае, по мере снижения нагрузки, мы можем отключить определенные агрегаты и использовать только некоторые агрегаты, чтобы работающие агрегаты работали с полной нагрузкой, а другие агрегаты были выключены, что снижает эксплуатационные расходы.
Параллельно соединив тепловую и гидроэлектростанцию, мы можем поставлять электроэнергию с минимальными затратами, позволяя гидроэлектростанции справляться с максимальной нагрузкой в сезон дождей, а теплоэлектростанции справляться с максимальной нагрузкой в летний сезон.
Для синхронизации нового генератора переменного тока с сетью или существующих параллельно подключенных генераторов переменного тока используются следующие различные методы:
- Метод темной лампы
- Метод двух ярких и одной темной лампы
- Метод синхроноскопа
Что произойдет, если первичный двигатель или турбина соединены с генератором переменного тока и включено возбуждение?
Если возбуждение отключено, но турбина все еще соединена с генератором, электрическая мощность генератора уменьшается.
Если первичный двигатель отсоединен, но возбуждение присутствует, генератор переменного тока будет работать как синхронный двигатель с бесконечной шиной.
Если клеммы генератора подключить к нагрузке вместо бесконечной шины, то через какое-то время первичный двигатель отсоединится, нагрузка не будет подавать электроэнергию, и двигатель постепенно остановится.
Использование синхронного генератора
Ниже приведены некоторые важные области применения синхронного генератора:
- Он используется на электростанциях из-за отсутствия потерь мощности.
- Используется везде, где требуется стабильность.
- Используется для поддержания коэффициента мощности сети.
- Помогает поддерживать постоянное напряжение в течение длительного времени.
Распространенные ошибки
Помните, что используются только 50 Гц и 60 Гц, потому что в энергосистеме турбина обычно дает больший КПД при 3000 об/мин или 3600 об/мин (рассчитывается по приведенной выше формуле), и в соответствии с этим , подходят частоты 50 Гц и 60 Гц.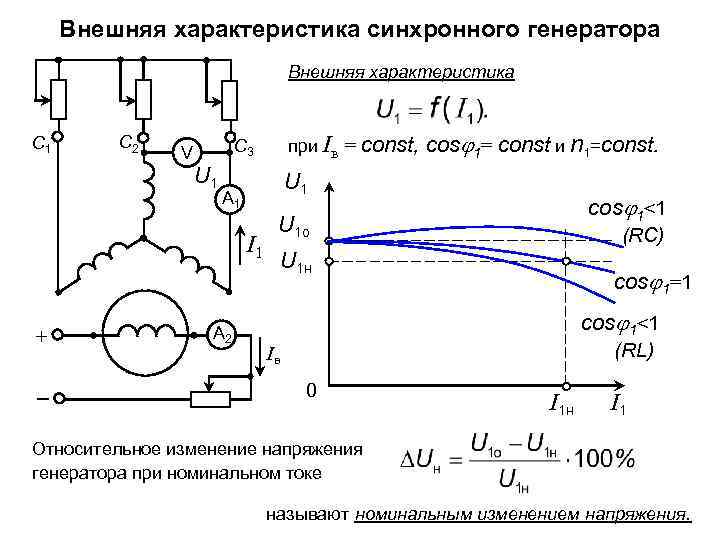
Обратите внимание, что существует ограничение по размеру генератора.
Контекст и приложения
В каждом из экспертных экзаменов для студентов и аспирантов эта тема в основном используется в следующем контексте:
- Бакалавр технологии на факультете электротехники и электроники
- Бакалавр наук в области физики
- Магистр физики
- Трансформаторы
- Катушка индуктивности и индуктивность
- Конденсатор
Практические задачи
Q1. Для работы синхронного генератора требуется _____________.
- Переменный ток
- Постоянный ток
- Как переменный, так и постоянный ток
- Нет
Правильный вариант: (c)
ток Пояснение: переменный ток.
Q2. Возбуждение, подаваемое на синхронный генератор, имеет форму _____________.
- Тепловая энергия
- Гидроэнергия
- Атомная энергия
- Тепловая, гидро- и атомная энергия
Правильный вариант: (d)
который может быть в форме возбуждения пара Пояснение: 9004 генерируются с использованием тепловой, гидро- и ядерной энергии.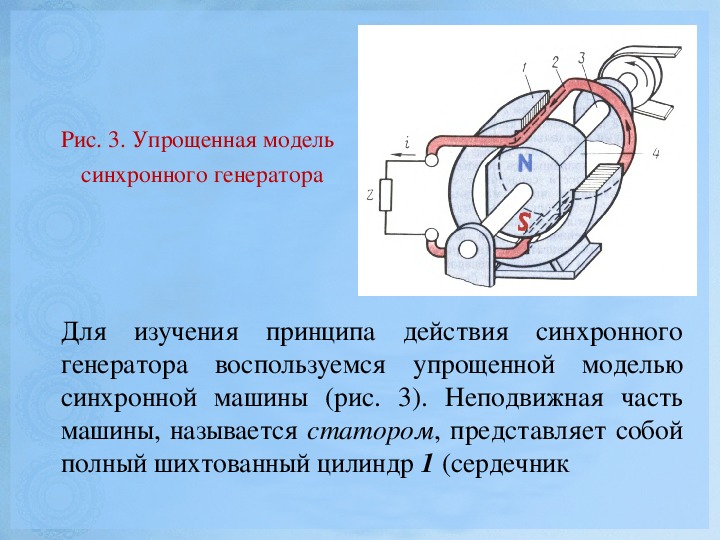
Q3. Что из следующего не учитывается для синхронности синхронных генераторов?
- Ток
- Напряжение
- Частота
- Фаза
Правильный вариант: (a)
Объяснение: Напряжение, частота и фаза являются необходимыми условиями для обеспечения синхронизма.
Q4. Что из следующего не является методом устранения гармоник в генераторе?
- Скошенный полюсный башмак
- Полюса наклонного поля
- Уменьшение воздушного зазора и сопротивления
- Использование катушек с коротким шагом
Правильный вариант: (c)
Объяснение: Гармоники можно устранить, увеличив воздушный зазор и сопротивление, а не уменьшая их. С другой стороны, уменьшение воздушного зазора обеспечивает лучший постоянный ток в машинах постоянного тока.
Q5. 4-полюсный генератор переменного тока имеет возбуждение, так что он вращается со скоростью 1500 об/мин. Определить частоту переменного напряжения в Гн.0004 (b)
Определить частоту переменного напряжения в Гн.0004 (b)
Объяснение: Используйте уравнение
Ns=120fPf=Ns×P120
Подставьте значения в приведенное выше выражение.
f=1500×4120f=50 Гц
СИНХРОННЫЙ ДВИГАТЕЛЬ С ПРЯМЫМ ЗАПУСКОМ ДОСТУПНАЯ АЛЬТЕРНАТИВА АСИНХРОННОМУ ДВИГАТЕЛЮ | Šarac
H. Qiu, Y. Zhang, K. Hu, C. Yang и R. Yi «Влияние витков обмотки статора на установившиеся характеристики синхронных двигателей с постоянными магнитами с линейным пуском», Energies, vol. 12, 2363, стр. 1-15, 2019. [Онлайн]. Доступно: https://doi.org/10.3390/en12122363
M.Tian, X. Wang, D. Wang, W. Zhao, C. Li, «Новый синхронный двигатель с постоянными магнитами с линейным пуском и 6/8-полюсной обмоткой статора», IEEE Transactions on Energy Conversion , том. 33, нет. 3, стр. 1164 – 1174, 2018. [Онлайн]. Доступно: https://doi.org/10.1109/TEC.2018.2826550
Х. Куи, К. Ху, Р. Йи, Ю. Вей, «Влияние асимметрии напряжения на установившиеся характеристики постоянного пуска от сети магнитный синхронный двигатель», IEEJ Transaction on Electrical and Electronic Engineering, vol. 14, no.11, pp. 1673-1680, 2019. [Онлайн]. Доступно: https://doi.org/10.1002/tee.22990
14, no.11, pp. 1673-1680, 2019. [Онлайн]. Доступно: https://doi.org/10.1002/tee.22990
B. Zöhra, M. Akar, M. Eker, «Проектирование нового ротора синхронного двигателя с линейным пуском», Electronics, vol. 8, № 25, стр. 1-18, 2019. [Онлайн]. Доступно: https://doi.org/10.3390/electronics8010025
X. Xu, Y. Cui, X. Wang, H. Feng, J. Si, «Характеристики синхронного двигателя с постоянными магнитами линейного пуска и новой конструкцией ротора, ” Международный журнал технологий цифрового контента и его приложений, том 7, вып. 6, стр. 1217-1225, 2013. doi:10.4156/jdcta.vol7.issue6.139
C. Ogbuka, C. Nwosu, M. Agu, «Динамическое и стационарное сравнение синхронных двигателей с постоянными магнитами с линейным пуском и внутренними и поверхностными магнитами», Archives of Electrical Engineering, vol. 65, № 1, стр. 105-116, 2016. [Онлайн]. Доступно: http://dx.doi.org/10.1515/aee-2016-0008
X.Y. Ма, Г-Дж. Ли, ZQ. Чжу, Г.В. Джуэлл, Дж. Грин, «Исследования синхронных реактивных машин с различными топологиями ротора и конфигурациями обмотки», IET Electric Power Applications, vol. 12, нет. 1, стр. 45-53, 2018. [Онлайн]. Доступно: http://dx.doi.org/10.1049/iet-epa.2017.0199
12, нет. 1, стр. 45-53, 2018. [Онлайн]. Доступно: http://dx.doi.org/10.1049/iet-epa.2017.0199
П. Худак, В. Храбовцова, «Математическое моделирование и определение параметров реактивного синхронного двигателя с короткозамкнутым ротором», Журнал электротехники, том. 61, нет. 6, стр. 357-364, 2010. [Онлайн]. Доступно: https://doi.org/10.2478/v10187-010-0055-y
П. Секерак, В. Храбовцова, Й. Пирхонен, Л. Каламен, П. Рафайдус, М. Онуфер, «Ферриты и различные обмотки типов в синхронном двигателе с постоянными магнитами», Journal of Electrical Engineering, vol. 63, нет. 3, стр. 162-170, 2012. [Онлайн]. Доступно: https://doi.org/10.2478/v10187-012-0024-8
А. Х. Исфахани, С. Ваез-Заде, «Синхронные двигатели с постоянными магнитами с линейным пуском: проблемы и возможности», Energy, vol. 34, нет. 11, стр. 1755-1763, 2009. [Онлайн]. Доступно: https://doi.org/10.
/j.energy.2009.04.022
Х. Бехбаханифард, А. Садуги, «Уменьшение крутящего момента синхронного двигателя с постоянными магнитами с линейным пуском», Журнал «Электротехника и технологии», том. 11, нет. 4, стр. 878-888, 2016. [Онлайн]. Доступно: https://doi.org/10.5370/jeet.2016.11.4.878.
11, нет. 4, стр. 878-888, 2016. [Онлайн]. Доступно: https://doi.org/10.5370/jeet.2016.11.4.878.
М. Н. Ф. Ибрагим, П. Сержант, Э. Рашад, «Простой подход к проектированию синхронного реактивного двигателя с низким пульсирующим крутящим моментом и высоким выходным крутящим моментом», Energies, vol. 9, 942, стр. 1-14, 2016. [Онлайн]. Доступно: https://doi.org/10.3390/en42
Л. Цзин, Дж. Гонг, Ю. Лин, «Анализ и уменьшение зубцового крутящего момента двигателей с постоянными магнитами с линейным пуском», Прогресс в исследованиях электромагнетизма, М, том . 78, стр. 115-124, 2019. [Онлайн]. Доступно: https://dx.doi.org/10.2528/PIERM18120902
А. Х. Исфахани, С. Ваез-Заде, «Влияние намагничивающей индуктивности на запуск и синхронизацию линейных синхронных двигателей с постоянными магнитами», IEEE Transactions on Magnetics, vol. 47, нет. 4, стр. 823-829, 2011. [Онлайн]. Доступно: https://doi.org/10.1109/TMAG.2010.2091651
М.А. Рахман, А.М. Ошейба, К. Курихара, М.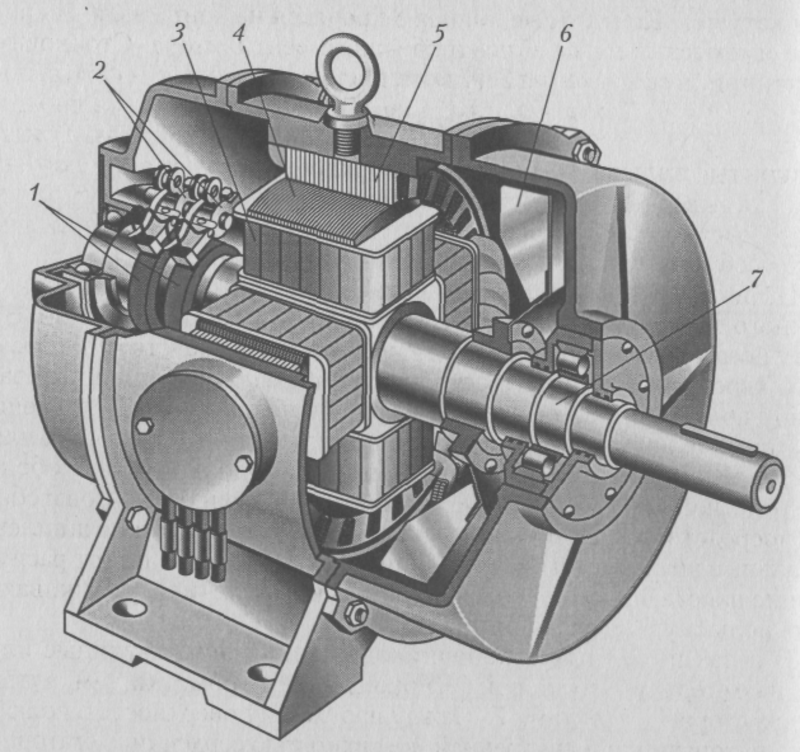 А. Джаббар, Х.В. Пинг, К. Ван, Х.М. Зубайер, «Достижения в области однофазного высокоэффективного двигателя с внутренними постоянными магнитами с пуском от сети», IEEE Transactions on Industrial Electronics, vol. 59, № 3, стр. 1333-1345, 2012. [Онлайн]. Доступно: https://doi.org/10.1109/TIE.2011.2167111
А. Джаббар, Х.В. Пинг, К. Ван, Х.М. Зубайер, «Достижения в области однофазного высокоэффективного двигателя с внутренними постоянными магнитами с пуском от сети», IEEE Transactions on Industrial Electronics, vol. 59, № 3, стр. 1333-1345, 2012. [Онлайн]. Доступно: https://doi.org/10.1109/TIE.2011.2167111
M. Gwoździewicz, J. Zawilak, «Однофазный линейный пуск синхронного двигателя с постоянными магнитами и наклонным статором», Power Electronics and Drives, vol. 1 (36), вып. 2, стр. 187-194, 2016. [Онлайн]. Доступно: https://doi.org/
5277/ped160212
М. Гедикпинар, О., Айдогмуш, «Проектирование самозапускающегося гибридного гистерезисного синхронного двигателя с постоянными магнитами, подключенного непосредственно к сети», Турецкий журнал электротехники и компьютерные науки, том. 25, нет. 3, стр. 1657-1668, 2017. [Онлайн]. Доступно: https://doi.org/10.3906/elk-1603-198
P.R. Viego, V. Sousa, JR Gómez, E.C. Quispe, «Синхронные реактивные двигатели с постоянными магнитами и ферритовыми магнитами для управления постоянной нагрузкой», International Journal of Electrical и вычислительная техника, том. 10, нет. 1, стр. 651-659, 2020. [Онлайн]. Доступно: http://doi.org/10.11591/
10, нет. 1, стр. 651-659, 2020. [Онлайн]. Доступно: http://doi.org/10.11591/
ijece.v10i1.pp651-659
М. Карами, Н. Мариун, М. Р. Мерджоу, М. З. А. А. Кадир, Н. Мисрон, М. А. М. Радзи «Распознавание ошибок статического эксцентриситета в трех -Фазовый линейный пуск синхронного двигателя с постоянными магнитами с использованием метода конечных элементов // Математические проблемы техники. 2014, стр. 1-12, 2014. [Онлайн]. Доступно: https://doi.org/10.1155/2014/132647
И. Хусейн, З. Аль-Хамуз, М.А. Абидо, А. Мильхем, «О математическом моделировании синхронных двигателей с постоянными магнитами с линейным пуском в условиях статического эксцентриситета», Энергии, том. 11, стр. 1-17, 2018. [Онлайн]. Доступно: https://doi.org/10.3390/en11010197
К.И. Баради, З. Аль-Хамуз, «Моделирование и симуляция синхронного двигателя с постоянными магнитами с линейным пуском и сломанными стержнями», Журнал электрических и электронных систем, том. 7, № 2, стр. 1-7, 2017. [Онлайн]. Доступно: http://dx.doi.org/10.4172/2332-0796.1000259
Доступно: http://dx.doi.org/10.4172/2332-0796.1000259
Исмагилов Ф., Вавилов В., Уразбахтин Р. Оптимизация синхронных электродвигателей с асинхронным пуском с помощью генетических алгоритмов // Международный обзор аэрокосмической техники. 11 нет. 2, стр. 66-75, 2018. [Онлайн]. Доступно: https://doi.org/10.15866/irease.v11i2.13365
Ł. Книпински, «Оптимальное проектирование геометрии ротора синхронного двигателя с постоянными магнитами с линейным пуском с использованием алгоритма летучей мыши», Open Physics., vol. 15, № 1, стр. 965-970, 2017. [Онлайн]. Доступно: https://doi.org/
1515/phys-2017-0119
В. Сарак, Д. Илиев, «Синхронный двигатель с постоянными магнитами по сравнению с асинхронным асинхронным двигателем», Электротехника, электроника, автоматика (EEA), том. 65, нет. 4, стр. 51-58, 2017. [Онлайн]. Доступно: http://www.eea-journal.ro/ro/d/5/p/EEA65_4_8
Ю. Дуан «Метод проектирования и оптимизации машин с постоянными магнитами и индукционных машин с поверхностным монтажом», диссертация, Институт энергетики Джорджии.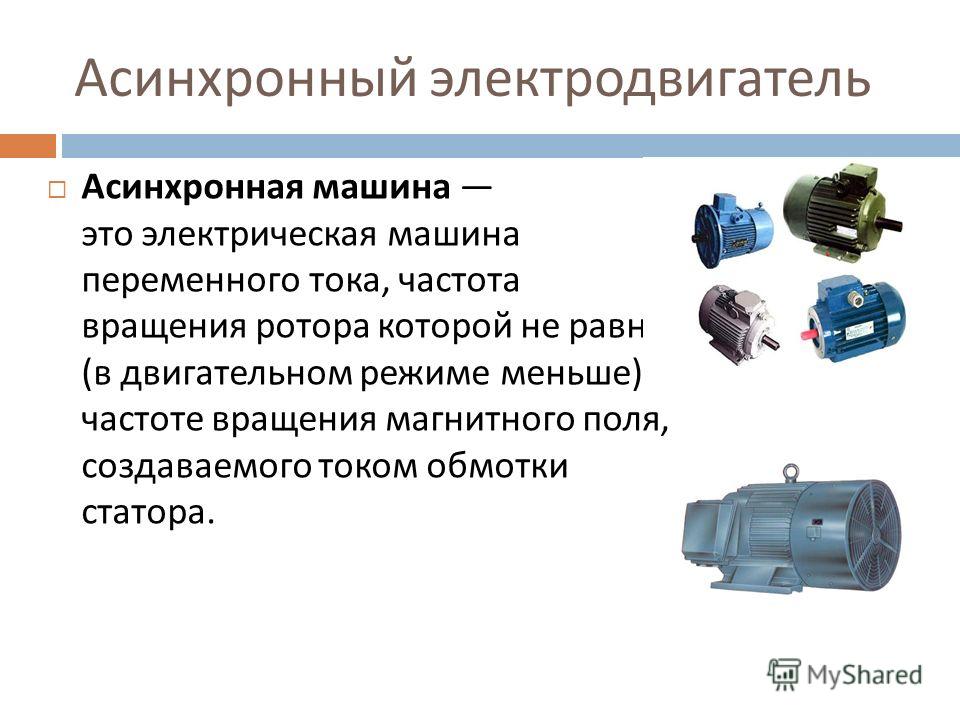 Технологии, 2010. [Онлайн]. Доступно: https://smartech.gatech.edu/bitstream/handle/1853/37280/duan_yao_201012_phd.pdf
Технологии, 2010. [Онлайн]. Доступно: https://smartech.gatech.edu/bitstream/handle/1853/37280/duan_yao_201012_phd.pdf
А. А. Адам, К. Гюлез, С. Кероглу, «Рассеянное магнитное поле, распределенное вокруг СДПМ», Турецкий журнал электротехники и компьютерных наук, том. 19, № 1, стр. 119-131, 2011. [Онлайн]. Доступно: http://dx.doi.org/10.3906/elk-1003-404
J. Soleimani, A. Vahedi, A. Ejlali, M.B. Bafghi «Исследование внутренних синхронных двигателей с постоянными магнитами для применения в тяговом приводе гибридных электромобилей» с учетом типа и температуры постоянного магнита, Турецкий журнал электротехники и компьютерных наук, том. 22, № 6, стр. 1517-1527, 2014. [Онлайн]. Доступно: https://doi.org/10.3906/elk-1105-58
М. Гюлеч, Э. Йолачан, Ю. Демир, О. Оджак, М. Айдын, «Моделирование на основе трехмерного анализа методом конечных элементов и экспериментальное исследование 24-слотового 8-полюсного аксиально- синхронный двигатель с постоянным магнитным потоком для отсутствия зубчатого крутящего момента и синусоидальной противо-ЭДС», Турецкий журнал электротехники и компьютерных наук, том. 24, нет. 1, стр. 262-275, 2016. [Онлайн]. Доступно: https://doi.org/10.3906/elk-1308-150
24, нет. 1, стр. 262-275, 2016. [Онлайн]. Доступно: https://doi.org/10.3906/elk-1308-150
A.S.O. Огунджуигбе, А.А. Джимо, Т.Р. Айоделе, «Динамическое и переходное поведение запуска линии, синхронная реактивная машина с компенсацией емкости», Журнал электрических систем и информационных технологий, том. 5, нет. 3, стр. 843-860, 2018. [Онлайн]. Доступно: https://doi.org/10.1016/j.jesit.2016.12.012
Дж. К. Асогва, Э. С. Обе, «Исследование переходных и установившихся режимов работы двухлинейных двигателей с постоянными магнитами (LSPMMS) с различными конфигурациями ротора», Нигерийский технологический журнал (NIJOTECH), том 38, вып. 1, стр. 185-192, 2019. [Онлайн]. Доступно: http://dx.doi.org/10.4314/njt.v38i1.23
Ф. Парасилити, М. Виллани, К. Пэрис, О. Валти, Г. Сонгини, А. Новелло, Т. Росси, « Повышение эффективности трехфазного асинхронного двигателя с литой медной клеткой ротора и высококачественной сталью», в Трудах симпозиума по силовой электронике, электроприводам, автоматизации и движению: SPEEDAM 2004, Италия, стр. 338-343, 2004. [Онлайн] . Доступно: https://www.copper.org/environment/sustainable-energy/electric-motors/education/motor-rotor/pdf/Three-Phase_Induction.pdf
338-343, 2004. [Онлайн] . Доступно: https://www.copper.org/environment/sustainable-energy/electric-motors/education/motor-rotor/pdf/Three-Phase_Induction.pdf
Т. Завилак, Й. Завилак, «Минимизация высших гармоник в синхронном двигателе с постоянными магнитами с линейным пуском», Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Politechniki Wrocławskiej Studia and Materiały, vol 63, no. 29, стр. 107-115, 2009. [Онлайн]. Доступно: http://yadda.icm.edu.pl/yadda/
element/bwmeta1.element.baztech-article-BPW9-0009-0014
М. Гвоздзевич, Л. Антал, «Исследование линейного пуска постоянного магнита Синхронный двигатель и свойства асинхронного двигателя», Prace Naukowe Instytutu Maszyn, Napędów and Pomiarów Elektrycznych Politechniki Wrocławskiej Studia i Materials, vol 64, no. 30, стр. 13-20, 2010. [Онлайн]. Доступно: http://yadda.icm.edu.pl/yadda/element/bwmeta1.element.baztech-article-BPW6-0021-0014
Г. С. Чингале, Р. Т. Угале, «Конструкция фильтра гармоник для синхронного двигателя с постоянными магнитами с линейным пуском», в материалах Международной конференции по достижениям в области электротехники (ICAEE), Индия, 2014 г. [Онлайн]. Доступно: https://doi.org/10.1109/icaee.2014.6838503
[Онлайн]. Доступно: https://doi.org/10.1109/icaee.2014.6838503
[PDF] Улучшение синхронных и асинхронных систем моторного привода, поставляемых фотоэлектрическими массивами с частотой
- Corpus ID: 73649226
- Corpus ID: 73649226
- .
title={СОВЕРШЕНСТВОВАНИЕ СИСТЕМ СИНХРОННОГО И АСИНХРОННОГО ПРИВОДА ДВИГАТЕЛЕЙ, ПИТАННЫХ ФОТОЭЛЕКТРИЧЕСКИМИ РЕШЕТКАМИ С ЧАСТОТНЫМ УПРАВЛЕНИЕМ},
автор={Л. Зарур и Рашид Ченни, Абдельхалим Борни и Айсса Бузид},
год = {2008}
}
- L. Zarour, R. Chenni, A. Bouzid
- Опубликовано в 2008 г.
- Машиностроение
Динамические характеристики синхронного двигателя с постоянными магнитами (PMSM) и асинхронного двигателя (ASM), подключенных к фотогальванической (PV) Массив через инвертор анализируются.
Разработаны математические модели фотоэлектрической батареи, инвертора/двигателя и контроллера. Фотоэлектрическая батарея представлена эквивалентной схемой, параметры которой рассчитываются с использованием экспериментально определенных вольт-амперных характеристик (I iV ). Разработан необходимый компьютерный алгоритм анализа производительности… Iris.elf.Stuba.SK
Улучшение производительности фотоэлектрической насосной системы с использованием двигателя синхронного неглубленности
- М. Набил, С. Аллам, Э. Рашад
Инженерные В статье представлена простая стратегия управления для повышения производительности системы привода с синхронным реактивным двигателем, питаемой от фотоэлектрического источника. Параметры фотоэлектрического генератора…
Сравнительное исследование фотоэлектрических насосных систем с приводом от различных двигателей, оптимизированных с помощью скользящего режима управления
- A. Bouchakour, M. Brahami, A. Borni
Engineering
- 2017
двигатель постоянного тока с возбуждением (DCM), асинхронный двигатель…
Моделирование и исследование характеристик однофазного асинхронного двигателя в насосной системе с фотоэлектрическим питанием с использованием MATLAB
- Н. Чандрасекаран, К. Тьягараджа
Машиностроение
- 2012
Перекачка воды с помощью двигателей переменного тока стала одним из наиболее осуществимых применений фотогальванической (PV) техники. Кроме того, в последние дни фотоэлектрическим насосам уделяется все больше внимания, в основном в отдаленных районах, где подключение…
Моделирование размеров и моделирование системы фотоэлектрического производства, питающей асинхронный двигатель мощностью 6 МВт, предназначенный для насосных приложений
- М. Бенаисса, С. Хаджери, С. Зиди
Машиностроение
- 2017
В этом документе предлагается автономная фотоэлектрическая (PV) насосная система для сельских/удаленных применений, особенно в большой пустыне на севере Африки, где много солнечного излучения.
Начиная с PV…Многоуровневый асинхронный двигатель с инверторным питанием для насосов
Трехфазные асинхронные двигатели широко используются в промышленных приводах из-за их прочности, надежности и простоты конструкции. Точное управление индукционной машиной всегда было вопросом…
Исследование и оптимизация систем водяных насосов с фотоэлектрическим питанием
Метод управления скользящим режимом (SM), связанный с повышающе-понижающим преобразователем постоянного тока для передачи максимальной мощности, выдаваемой фотоэлектрическим (PV) генератором.
Сравнительное исследование фотогальванических систем водяных насосов, приводимых в действие двигателем постоянного тока (DCM) и асинхронным двигателем (IM), оптимизированных с управлением P&O
- Bouchakour Abdelhak, Borni Abdelhalim, Boukebbous Seif Eddine, Zaghba Layachi, Fezzani Amor, M. Brahami
Машиностроение
ТЕХНОЛОГИИ И МАТЕРИАЛЫ ДЛЯ ВОЗОБНОВЛЯЕМОЙ ЭНЕРГЕТИКИ, ОКРУЖАЮЩЕЙ СРЕДЫ И УСТОЙЧИВОГО РАЗВИТИЯ: TMREES19Gr
- 2019
В этой статье представлено сравнение между двумя фотоэлектрическими двигателями постоянного тока, приводимыми в движение асинхронным двигателем, и системой водяного насоса с раздельным возбуждением (DCM) и асинхронным двигателем постоянного тока с отдельным возбуждением.
(IM), через понижающе-повышающий преобразователь постоянного тока, соединенный с…Замкнутый контур управления скоростью привода СДПМ с питанием от фотоэлектрических элементов для водяной насосной системы
- Alman, Eeran, P. P, Rathibha, Harathi
Инженерное дело
- 2015
В этом проекте представлен автономный привод PMSM с питанием от солнечных фотоэлектрических систем для системы водяных насосов. Откачка воды является универсальной потребностью в сельском хозяйстве, и использование фотоэлектрических панелей является естественным выбором для таких…
Сравнительный анализ VSI и 7 уровня MLI Fed Infinity Motor Drive со схемой IFOC и насосной нагрузкой
- Krishna Prabhakar Lall, Charles Baby , П. Читра
Машиностроение
- 2014
Асинхронный двигатель назван промышленным предприятием. Трехфазные асинхронные двигатели широко используются в промышленных приводах из-за их прочности, надежности и простоты конструкции.
…Проектирование и анализ системы водяных насосов с питанием от солнечных батарей с использованием синхронного двигателя с постоянными магнитами
Перекачка воды с использованием солнечной энергии является одним из основных применений солнечной энергии в отдаленных районах. В основном в развивающихся странах сельские районы не часто подключены к основной сети, поэтому у людей есть…
ПОКАЗАНЫ 1-10 ИЗ 12 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантности Наиболее влиятельные документыНедавность
Векторная команда асинхронного двигателя, питаемого от фотогальванического генератора
- M. Mimouni, M. Mansouri Engineering, B.
- 2004
Рабочие характеристики двигателя постоянного тока с постоянными магнитами, питаемого от солнечных элементов
- Дж. Аппельбаум
Инженерное дело, физика
- 1986
Фотоэлектрическая перекачка воды с отслеживанием пиковой мощности с использованием простого шестиступенчатого инвертора прямоугольных импульсов
- E. Muljadi, R. Taylor
Engineering
IAS ’96. Протокол конференции по отраслевым приложениям IEEE 1996 г. Тридцать первое ежегодное собрание IAS
- 1996
в случае возникновения короткого замыкания обмотка двигателя и силовые полупроводниковые переключатели могут быть защищены от протекания чрезмерного тока.
Высокопроизводительная система привода внутренней синхронной машины с постоянными магнитами с инверторным питанием
- B. Bose
Инженерное дело
- 1987
Высокопроизводительная, полностью функциональная четырехквадрантная схема управления для внутренней описана синхронная машина с постоянными магнитами (ПМ). Машина работает плавно с полной производительностью в…
Динамические характеристики насосной системы PV с прямым соединением
- W. Anis, H. Metwally
Физика
- 1994
Работа двигателей постоянного тока с постоянными магнитами, питаемых от общего источника солнечных элементов
предназначен для питания одного насоса с электродвигателем.
- A. Bouchakour, M. Brahami, A.
 Разработаны математические модели фотоэлектрической батареи, инвертора/двигателя и контроллера. Фотоэлектрическая батарея представлена эквивалентной схемой, параметры которой рассчитываются с использованием экспериментально определенных вольт-амперных характеристик (I iV ). Разработан необходимый компьютерный алгоритм анализа производительности…
Разработаны математические модели фотоэлектрической батареи, инвертора/двигателя и контроллера. Фотоэлектрическая батарея представлена эквивалентной схемой, параметры которой рассчитываются с использованием экспериментально определенных вольт-амперных характеристик (I iV ). Разработан необходимый компьютерный алгоритм анализа производительности…  Borni
Borni Начиная с PV…
Начиная с PV… (IM), через понижающе-повышающий преобразователь постоянного тока, соединенный с…
(IM), через понижающе-повышающий преобразователь постоянного тока, соединенный с…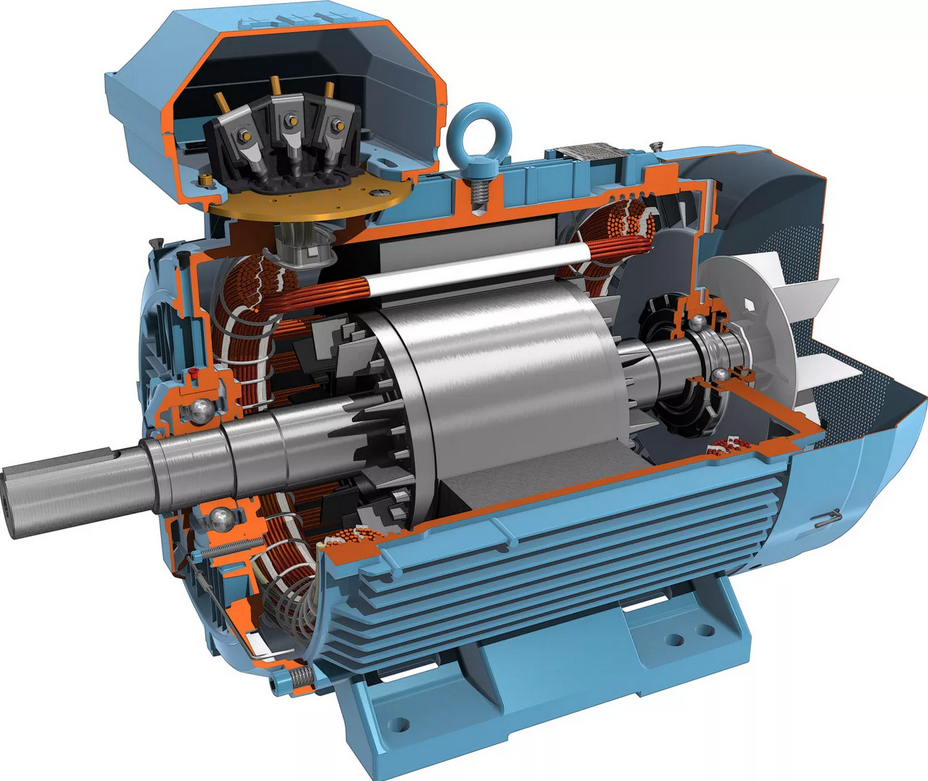 …
… Muljadi, R. Taylor
Muljadi, R. Taylor