Турникет моторизованный «Вектор 2.1» — Инфоматика
Компактный полуростовой моторизованный смарт-турникет «Вектор 2.1» выполнен из нержавеющей стали и отвечает самым высоким требованиям, предъявляемым к эксплуатации. Обладает широким функционалом и повышенной надежностью. Обеспечивает доступ по бесконтактным картам, штрих / QR-коду, биометрическим параметрам. Функция «антипаника», в случае необходимости, переводит планки в режим беспрепятственного прохода.
«Вектор 2.1» предназначен для использования на объектах с большой проходимостью людей: учреждения образования, культуры, спорта, офисные центры и т.п. Небольшие, компактные размеры смарт-турникета позволяют использовать его на ограниченной площади и легко вписать в интерьер любой проходной.
Турникет может быть оснащен BLE / NFC считывателями для работы с мобильным приложением.
В ОТЛИЧИЕ ОТ ОБЫЧНОГО СТАЦИОНАРНОГО ТУРНИКЕТА, СМАРТ – ТУРНИКЕТ «ВЕКТОР 2.1» ИМЕЕТ НЕСКОЛЬКО УНИКАЛЬНЫХ ОСОБЕННОСТЕЙ:
- Это не просто турникет, это полнофункциональное IP – устройство
 Надежно, удобно, эстетично.
Надежно, удобно, эстетично.
 Надежно, удобно, эстетично.
Надежно, удобно, эстетично.- Полнофункциональное встроенное программное обеспечение системы контроля доступа позволяет смарт-турникету работать как самостоятельно, без подключения к внешней СКУД, так и легко интегрировать турникет с любыми внешним информационным системами, например, с объектовой СКУД и т.п. и управлять с помощью аппаратных / программных пультов. Удобный и простой интерфейс управления + API для подключения внешней СКУД.
- Несколько факторов идентификации позволяет использовать любой способ прохода через турникет — бесконтактные карты, все типы штрих / QR-кода, биометрические параметры ( например, лицо), BLE и NFC метки, а так же настраивать многофакторный доступ по нескольким параметрам.
- Встроенные IP-камеры для системы распознавания лиц. Возможна интеграция с большинством известных производителей решений в области распознавая лиц.
- Встроенная автоматизированная система разовых пропусков (СРП) — позволяет быстро и удобно составлять и согласовывать заявки на пропуск, который в виде QR-кода отправляется на смартфон посетителя.

- Яркий цветной дисплей транслирует графические и информационные сообщения — статус билета, разрешение доступа или причину отказа в проходе, сервисные сообщения, а так же служит для вывода информации по аккредитации.
- Интеллектуальная световая индикация указывает направление прохода и категорию билета / категорию посетителя / попытку несанкционированного прохода.
- Встроенный контроллер СКУД автоматически переключается между онлайн и офлайн режимам, загрузка изменений из внешней системы позволяют смарт-турникету работать даже при возникновении перебоев со связью и электричеством.
- Высокая пропускная способность. Моментальное срабатывание при поднесении идентификатора. Собственный механизм управления створками на основе сервопривода.
 Собственный механизм управления створками на основе сервопривода.
Собственный механизм управления створками на основе сервопривода.Оборудование сертифицировано и соответствует необходимым требованиям безопасности.
Производится на территории Российской Федерации, что подтверждено заключением Минпромторга России № 60203/11 от 19.07.2021
Сертификаты
| Основные параметры | |
|---|---|
| Питание | 230 VAC |
| Максимальный ток | 2 A |
| Потребляемая мощность | 55 Wh |
|
Пропускная способность, проходов/час: В режиме прохода по штрих-коду В режиме прохода по бесконтактной карте В режиме эвакуации | 700 1800 2400 проход полностью открыт |
| Ширина зоны прохода | 550 мм |
| Количество встроенных экранов | 1/2 |
|
Количество встроенных считывателей | 1/2 |
|
Поддерживаемые типы штрих-кодов: Линейные (1D) Двумерные (2D) | EAN-8/13, Code 128, Interleaved 2 of 5 (ITF) и другие QR Code, Aztec и другие |
|
Бесконтактный интерфейс: Рабочая частота Поддерживаемые типы карт | 13,56 МГц ISO 14443 Part 4 Type A and B MIFARE Series |
| Средняя наработка на отказ, проходов |
не менее 20 млн. проходов проходов
|
| Средний срок службы | 8 лет |
| Масса турникета |
Мы, как производители, оставляем за собой право вносить изменения в конструкцию устройства (включая изменения габаритных размеров), без отражения в техническом паспорте, которые не несут снижения потребительских свойств и не ухудшают качество устройства.
Частотный преобразователь М152T4V (вектор) 1,5кВт 380В — цена 14 900 руб, М152T4V (вектор) — в Санкт-Петербурге
Главная Каталог Электротехническое оборудование Частотные преобразователи Частотный преобразователь М152T4V (вектор) 1,5кВт 380В
|
Ход |
Номинальное напряжение |
3-фазы (Серия 4В) 380В; 50 / 60Гц |
||
|
Допуcтимое напряжение |
3-фазы (4В # Серия) 320В ~ 460В |
|||
|
Выход |
Напряжение |
Серии 4В; 0 ~ 460В |
||
Частота |
Низкочастотный режим: 0~300Гц; высокочастотный режим: 0~3000Гц |
|||
|
Перегрузка |
Тип G: 110% на длительный режим, 150% на 1 мин, 180% на 5 с. |
|||
|
Режим управления |
Управление v/f, улучшенное управление v/f, v/f разделеное управления, управление вектором тока |
|||
|
Характер управления |
Настройка Разрешения |
Аналоговый вход |
0,1% от максимальной выходной частоты |
|
|
Цифровая настройка |
0,01Гц |
|||
|
Частота |
Аналоговый вход |
В пределах 0,2% от максимальной выходной частоты |
||
|
|
В пределах 0,01% от заданной выходной частоты |
|||
|
Управление V / F |
Кривая V / F (вольт частотная характеристика) |
Установка частоты 5 ~ 600 Гц, установка кривой V / F по точкам, или фиксированная кривая V / F постоянного крутящего момента. |
||
|
Компенсация крутящего момента |
Ручная настройка: 0,0 ~ 30% от номинальной мощности. Автоматическая компенсация: в зависимости от выходного тока и параметров двигателя. |
|||
|
Автоматическое ограничение тока и напряжения |
Во время ускорения, замедления или установившегося режима, при автоматическом определение тока и напряжения статора двигателя, происходит управление этими параметрами по уникальному алгоритму, что бы минимизировать вероятность аварийного отключения |
|||
|
Бессенсорное векторное управление |
Напряжение частота |
Отрегулирует соотношение напряжения и частоты в соответствии с параметрами двигателя и уникальным алгоритмом. |
||
|
Характер крутящего момента |
Пусковой момент: 3,0 Гц, 150% номинального крутящего момента (управление VF) 0,5 Гц, 180% номинального крутящего момента (SVC, FVC) 0,05 Гц 180% номинального крутящего момента (VC) Точность рабочей скорости в установившемся режиме: ≤ ± 0,5% номинальной синхронной скорости Рекция крутящего момента: ≤50мс VC, SVC, FVC ≤20мс |
|||
|
Автонастройка двигателя |
Возможность автоматически определять параметры в статическом и динамическом состояние двигателя, что гарантирует оптимальное управление. |
|||
|
Ограничение тока и напряжения |
Управление по току с обратной связью, без воздействия бросков тока, отличная функция ограничения по току и перенапряжению |
|||
|
Ограничение во время понижения напряжения |
Специально для эксплуатации в сетях с низким или нестабильным напряжением: даже ниже, чем допустимый диапазон напряжения, система может поддерживать максимально возможное время работы на основе своего уникального алгоритма и распределения остаточной энергии |
|||
|
Типовые функции |
Многоскоростной режим и частота качаний |
16-ступенчатое программируемое много скоростное управление, режим нескольких операций. Частота качаний: заданная частота и центральная частота регулируются, память параметров и восстановление после отключения питания. |
||
|
ПИД-регулирование и управление через RS485 |
Встроенный ПИД — регулятор (с возможностью предустановки частоты). Стандартная конфигурация функции связи RS485, выбор протокола связи, функция синхронизации управления. |
|||
|
Задание частоты жэ.. |
Аналоговый вход |
Постоянное напряжение 0 ~ 10 В, постоянный ток 0 ~ 20 мА (необязательный верхний и нижний предел) |
||
|
Цифровой вход |
Задание с панели управления, задание через порт RS485, управление через клеммы UP / DW или в сочетании с аналоговым входом |
|||
|
Выходной сигнал |
Цифровой выход |
2-канальный выход OC и одноканальное выходное реле (TA, TB, TC), до 16 вариантов |
||
|
Аналоговый выход |
2-канальный аналоговый выходной сигнал, выходной диапазон в пределах 0 ~ 20 мА или 0 ~ 10 В с гибкой настройкой, возможность запрограмировать выход на физические величины, такие как заданная частота, выходная частота |
|||
|
Автоматическое поддержание напряжение |
Динамическое устойчивое состояние, статическое устойчивое состояние и нестационарное напряжение для выбора, чтобы получить наиболее устойчивую работу |
|||
|
Установка времени ускорения |
0,1 с ~ 3600 минут настройка времени, S тип кривой или режим линейного ускарения на выбор |
|||
|
Торможение |
Динамическое |
Начальное напряжение динамического торможения, противовключение и динамическое торможение с непрерывной регулировкой |
||
|
Торможение DC током |
Начальная частота торможения постоянным током: 0,00 ~ [F0. |
|||
|
Ограничение движения |
0~100 0: не действует |
|||
|
Низкий Уровень Шума Работы |
Регулировка несущей частоты 1,0 кГц ~ 16,0 кГц, минимизирует шум двигателя |
|||
|
Отслеживание скорости и перезапуск |
Плавный перезапуск во время работы, мгновенный останов и перезапуск |
|||
|
Счетчик |
Встроенный счетчик, облегчающий системную интеграцию |
|||
|
Рабочие функции |
Установка верхнего и нижнего пределов частоты, режим попуска частоты, ограничение реверса, компенсация частоты скольжения, связь через RS485, постепенное увеличение и уменьшение частототы, восстановление после отказа |
|||
|
Дисплей |
Отображаемые параметры |
Состояние работы |
Выходная частота, выходной ток, выходное напряжение, скорость двигателя, заданная частота, температура модуля, настройка ПИД, обратная связь, аналоговый вход и выход. |
|
|
Авария |
Запись оследних 6 ошибок; запись рабочих параметров, когда произошло последнее аварийное отключение, включая выходную частоту, заданную частоту, выходной ток, выходное напряжение, напряжение постоянного тока и температуру модуля. |
|||
|
Функции защиты |
Перегрузка по току, перенапряжение, пониженное напряжение, неисправность модуля, электрическое тепловое реле, перегрев, короткое замыкание, обрыв фазы на входе и выходе, неправильная настройка параметров двигателя, неисправность внутренней памяти и т.д. |
|||
|
Окружающая среда |
Температура окружающей среды |
-10 ℃ ~ + 40 ℃ (пожалуйста, используйте преобразователь частоты с запасом по мощности при температуре окружающей среды 40 ℃ |
||
|
Влажность |
Относительная влажность 5% ~ 95%, без выпадения конденсата |
|||
|
Окружающая среда на месте работы |
В помещении (без прямых солнечных лучей, едких или горючих газов, масляного тумана и пыли) |
|||
|
Высота над уровнем моря |
Эксплуатация с пониженной производительностью свыше 1000 м, снижение на 10% на каждые 1000 м подъема. |
|||
|
Корпус |
Класс защиты |
IP20 |
||
|
Охлаждение |
Воздушное охлаждение с управлением вентилятором |
|||
|
Установка |
Настенное исполнение, шкафное исполнение |
|||


 16] верхний предел частоты, время торможения: 0,0 ~ 100,0 с; Ток торможения: 0,0% ~ 150,0% от номинального тока
16] верхний предел частоты, время торможения: 0,0 ~ 100,0 с; Ток торможения: 0,0% ~ 150,0% от номинального тока

Линейная алгебра 1: векторные пространства и пространство столбцов | by adam dhalla
Углубление в
реальную линейную алгебру с пространством столбцов и векторным пространством В этой статье предполагается знание исключения Гаусса, умножения матриц, линейных комбинаций и некоторых других понятий. Если исключение Гаусса кажется вам чуждым, у меня есть серия из трех статей, посвященных его значениям и механике.![]()
Теперь, когда мы познакомились с методом исключения для рассмотрения системы уравнений Ax = b, мы можем еще немного углубиться в абстрактные концепции линейной алгебры, лежащие в основе этой системы.
Мы можем проанализировать строки и столбцы нашей матрицы A, чтобы понять концепцию векторных пространств и подпространств.
Что такое векторное пространство?
Векторное пространство, а позже и подпространства, представляют собой группу векторов , которые замкнуты относительно скалярного умножения и сложения. Давайте разберемся.
Если у нас есть «векторное пространство» S и у нас есть векторы v и w, , которые оба принадлежат к группе S, v + w (сложение векторов) также должно принадлежать S , а также c v или d w (умножение, где c и d — скаляры).
Вместе мы можем объединить операции сложения векторов и скалярного умножения, чтобы получить линейную комбинацию , в формате c v + d w. Если мы можем взять линейную комбинацию для , все векторов v и w в подпространстве и все скаляры с действительными числами c или v и все еще остаются внутри некоторого пространства S , у нас есть действительное векторное пространство.
Если мы можем взять линейную комбинацию для , все векторов v и w в подпространстве и все скаляры с действительными числами c или v и все еще остаются внутри некоторого пространства S , у нас есть действительное векторное пространство.
Чтобы лучше понять это, давайте рассмотрим случай, когда мы не удовлетворяем этому критерию правильного векторного пространства. Скажем, мы определяем наше пространство как все двумерные векторы, где x и y оба положительны.
Таким образом, чтобы это пространство было правильным, все векторы в первом квадранте, добавленные к другому вектору из первого квадранта, должны оставаться в первом квадранте, и любой вектор, умноженный на скаляр, также должен оставаться в пространстве.
Наша система в порядке (замкнута) при сложении — думая о сложении двух положительных векторов, невозможно представить, что сложение двух из них оставляет первый квадрант.![]()
Наша система ломается при скалярном умножении — умножение на любой отрицательный скаляр выводит нас за пределы первого квадранта, например, -1:
Поскольку наше определение пространства не замыкается при скалярном умножении, это не правильный вектор Космос; даже не векторное пространство вообще.
9n векторных пространств — это пространства, определяющие измерения. Например, подпространство R² (n=2) описывает хорошо знакомую нам декартову координатную плоскость.Каждый вектор на двумерной декартовой плоскости находится в подпространстве R². Вы не можете добавить какие-либо 2D-векторы или умножить их на скаляр, а оставить размерность R², как-то перейти от a = [2, 3] к a = [2, 3, 5].
Таким образом, наша система R² замкнута относительно умножения и сложения и, хотя это может показаться немного очевидным, технически является пробелом. Это то, что мы называем векторное пространство. Все остальное, что мы будем описывать после этого, — это векторных подпространств — в основном, чтобы посмотреть, сможем ли мы найти меньшие пространства, которые содержатся в наших больших векторных пространствах, таких как R².
Например, , если наше неудавшееся «подпространство 1-го квадранта» на самом деле было правильным подпространством, которое было замкнуто при умножении и сложении, это было бы подпространством R², , поскольку оно имело дело с поиском пробелов в векторном пространстве (поэтому , суб пробелов) R².
Мы можем определить R², взяв линейную комбинацию любых двух векторов, которые не лежат на одной прямой. Давайте объясним это немного подробнее.
Давайте сначала рассмотрим два вектора, которые не определяют все пространство R².
Если бы это определяло все пространство R², мы бы сказали, что вы можете определить любую точку (вектор) в двумерном пространстве , поставив определенные числа как a и b. Давайте нанесем эти два вектора (2, 1) и (4, 2) на двумерное пространство.
Эти два вектора лежат друг над другом — они коллинеарны. Любая линейная комбинация этих двух векторов также приведет к вектору, существующему на этой линии (представьте, что вы растягиваете этот вектор или добавляете эти векторы друг к другу).
Другими словами, любая комбинация этих векторов будет лежать на пунктирной линии. Мы называем это диапазоном комбинации, но я расскажу о диапазоне позже.
Следовательно, комбинация этих двух векторов не может определять всю 2D-плоскость — она не определяет R². Итак, какая пара векторов будет? 9n и опишите всего пространства, в котором вы сейчас работаете.
Пространство столбца матрицы
Мы можем наблюдать два векторных подпространства, глядя на матрицу. Это пространство столбцов и пустое пространство . Мы можем начать с просмотра пространства столбца, которое немного легче понять. Мы рассмотрим нулевое пространство в следующей статье.
Возьмем некоторую матрицу A.
Пространство столбцов является векторным подпространством, определенным столбцами матрицы A. Другими словами, если мы возьмем два столбца матрицы A и умножим их на скаляры, сложим их или оба (линейные комбинации), какое пространство мы можем определить?
Другими словами, если мы возьмем два столбца матрицы A и умножим их на скаляры, сложим их или оба (линейные комбинации), какое пространство мы можем определить?
Эта линейная комбинация может быть представлена обозначением C(A).
Эти два вектора имеют три числа, что означает, что они определяют точку в трехмерном (или R³) пространстве. Если эти точки не лежат на одной линии, мы можем с уверенностью предположить, что, заменяя местами любые a или b, мы можем определить плоскость значений.
Любая комбинация синего и красного векторов приведет к тому, что вектор будет лежать на зеленой плоскости.Вы можете представить себе два вектора в трехмерном пространстве, идущие в разных направлениях и имеющие плоскость, проходящую через оба из них. Техническим словом для этого является диапазон линейной комбинации. Подставляя константы a и b, мы можем создать любой вектор на плоскости.
Это можно доказать математически, но это не добавляет интуиции — вместо этого представьте мысленный образ сложения (хвост к голове) и растяжения наших двух векторов, и вы увидите, что результат все равно оказывается на плоскости . Становится все легче и легче верить, чем больше выполняется упражнение.
Становится все легче и легче верить, чем больше выполняется упражнение.
Чтобы лучше понять нашу первую тему, векторных подпространств, мы можем увидеть, как мы можем определить не только плоскость, но и все трехмерное пространство (R³).
Мы можем сделать это, только добавив третий неколлинеарный вектор. Слово, которое мы введем позже для описания неколлинеарности, будет независимым. Для краткости давайте использовать слово независимый без полного объяснения деталей, стоящих за этим термином.
Добавив этот третий оранжевый вектор, мы теперь можем охватить все пространство R3.Подобным образом, мы можем иметь мысленный образ расположения, растяжения и добавления этих трех векторов всеми способами и находить вполне убедительным, что они действительно могут получить доступ ко всему возможному трехмерному пространству.
Это согласуется с нашим определением векторного пространства. Мы описываем R³.
Давайте теперь посмотрим на четыре разные матрицы 3 x 3 и поймем, как пространство столбца может различаться в зависимости от занимаемого им пространства.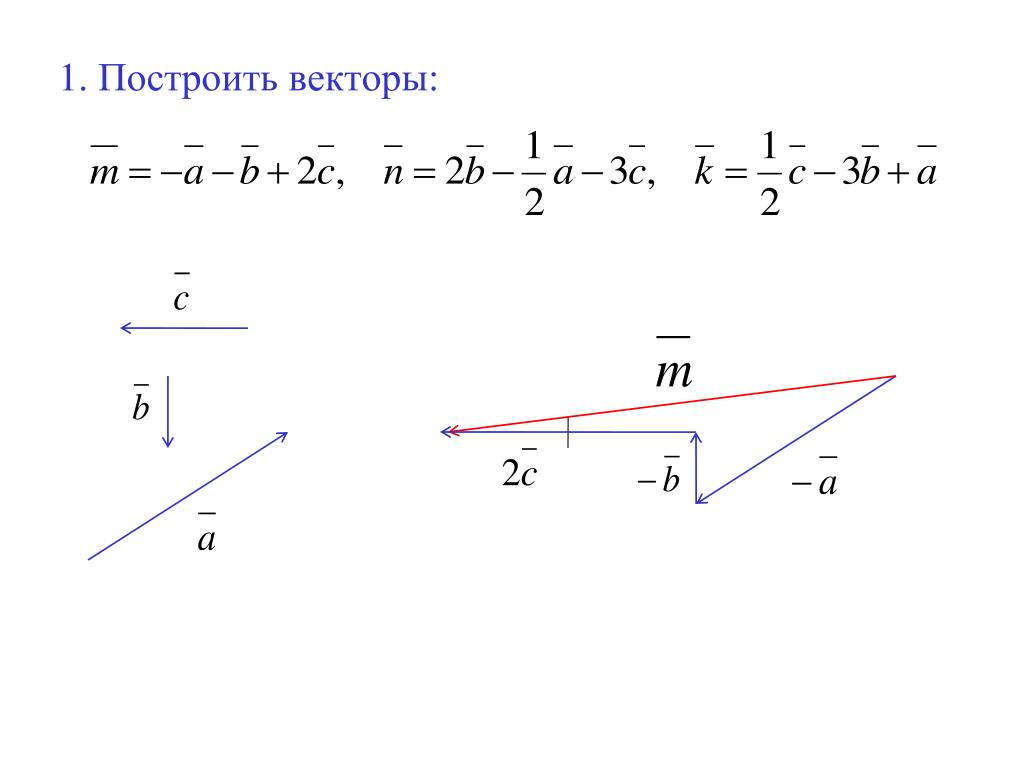
Во-первых, чтобы было понятно, что все это подпространства в R³. Все они существуют в 3-х измерениях — даже если они описывают линию или точку, эта линия или точка существует в трехмерном пространстве. Вот почему мы не описываем линию, проходящую через трехмерное пространство, как R¹, так как это означало бы, что все пространство, «предел», если хотите, одномерно.
Все четыре из них описывают четыре способа разделения пространства R³ на четыре подпространства. Давайте изучим каждый из них.
Матрица A: Все пространство R³
Пространство столбцов первой матрицы A описывает все трехмерное пространство. Все три его столбца независимы и не лежат в одной плоскости или коллинеарны, и, таким образом, могут комбинироваться вместе для описания любого вектора (точки) в R³. Итак, матрица A равна R³.
Наши столбцы в A не кратны друг другу и не являются комбинациями друг друга. Они полностью независимы.
Матрица B: Плоскость в R³
Матрица B имеет только два независимых столбца. Третий столбец представляет собой сумму первого и второго столбцов. Поэтому мы не получает новой информации из нашего нового столбца, поскольку он строится непосредственно на информации из первых двух столбцов.
Третий столбец представляет собой сумму первого и второго столбцов. Поэтому мы не получает новой информации из нашего нового столбца, поскольку он строится непосредственно на информации из первых двух столбцов.
То, что наш третий вектор является суммой первых двух, выражается в том, что третий вектор (желтый) существует в плоскости, описываемой первым и вторым (красным и синим) векторами. Таким образом, мы все еще не можем описать какой-либо вектор с этими тремя векторами, лежащими вне этой плоскости.
Другими словами, несмотря на то, что у нас есть три вектора, один из них зависит от , а не дает никакой новой информации. Можно подумать, что мы могли бы выразить такое же количество информации, просто используя первый и второй столбцы и исключив последний.
Пролет в форме плоскости (зеленый), созданный нашими первым и вторым векторами (синий и красный). Наш третий вектор не добавляет новой информации и все еще находится в диапазоне первых двух векторов.
Опять же, я должен подчеркнуть тот факт, что это не пространство R² — это двумерная плоскость в пространстве R³.
Матрица C: Линия в R³
Теперь у нас есть только один независимый вектор в нашей матрице. Наши второй и третий векторы — это просто первый вектор, умноженный на два и четыре соответственно. Это означает, что мы описываем только одну линию, , так как наш второй и третий вектор лежат прямо поверх нашего первого вектора, просто растянутые.
Трудно разглядеть, но красный (первый), синий (второй) и желтый (третий) векторы лежат прямо друг над другом.Хотя у нас есть три вектора, подставив константы a, b и c вернут нам что-то на той же линии, что и три вектора, потому что добавление или растяжение этих векторов не меняет направление векторов.
Другой способ думать об этом состоит в том, что мы могли бы получить тот же диапазон, даже избавившись от двух векторов.
Зеленый цвет обозначает диапазон вектора. Опять же, это не векторное пространство R¹, это линия , проходящая через векторное пространство R³. Я повторяю это, но это такая целостная концепция, которую нужно полностью понять, поэтому я повторю ее. Теперь возникает естественный вопрос: можем ли мы уменьшить интервал до одной точки?
Я повторяю это, но это такая целостная концепция, которую нужно полностью понять, поэтому я повторю ее. Теперь возникает естественный вопрос: можем ли мы уменьшить интервал до одной точки?
Матрица D: точка в нуле в R³
Наконец, у нас есть нулевая матрица D. Это технически имеет один независимый вектор, поэтому должно описывать линию в R³. Единственное, что (0, 0, 0) при умножении на скаляр или прибавлении к (0, 0, 0) возвращает то же самое (0, 0, 0). Таким образом, мы просто застряли в одной точке, и это нулевой вектор.
Особенно важно отметить, что хотя это подпространство содержит только один вектор (0, 0, 0), оно удовлетворяет всем критериям подпространства. Умножение на любую константу вернет что-то в подпространстве (0, 0, 0), а сложение с другими векторами в подпространстве также вернет что-то в подпространстве (0, 0, 0) + (0, 0, 0) = (0 , 0, 0).
Также важно отметить, что единственное место, где у нас может быть одноточечное подпространство, — это начало координат (0, 0, 0), поскольку любая другая отдельная точка создаст линию — например, (0, 0 , 1) можно умножать или добавлять, чтобы получить другие точки, например (0, 0, 5).![]()
Это особое подпространство, и мы часто называем его подпространством z .
Резюме:
Итак, для нашей матрицы (3, 3) у нас было 4 различных подпространств. Это применимо, как правило, ко всем квадратным матрицам — любая (m, m) матрица будет иметь m + 1 возможных подпространств.
Начиная с z, , если каждый добавляемый нами вектор не зависит от предыдущего, мы можем надеяться, что каждый вектор увеличивает размерность диапазона на единицу (точка → линия → плоскость → R³)
Пространство столбца и Ax = b
Если вы не дошли до Ax = b понимания систем уравнений, а также исключения Гаусса, не обращайте на это внимания или читайте мои статьи на эту тему.
Это понимание пространства столбцов может помочь нам лучше понять другой взгляд на системы уравнений в формате Ax = b. Если у нас есть какая-то система уравнений, скажем:
Мы можем выразить это как линейную комбинацию столбцов, как мы всегда делали для описания линейных систем уравнений.
Теперь мы можем заметить нечто совершенно очевидное. Чтобы какой-то ответ b имел единственный ответ, он должен лежать в пространстве столбца A. Если вы этого не замечаете, присмотритесь. Разделение наших столбцов A дает нам линейную комбинацию с x, y и z в качестве скаляров. Чтобы наш b имел ответ, он должен быть некоторой линейной комбинацией этих векторов.
Наш ответ должен лежать в линейном, плоском или векторном пространстве, образованном столбцами или A. Наш ответ b должен лежать в пространстве столбцов A , чтобы его можно было решить.
В следующей статье мы кратко поговорим о нулевом пространстве, а затем перейдем к реальному решению таких систем, как Ax = b, с понятиями столбцового пространства и нулевого пространства, а также перейдем к неквадратным системам.
Адам Дхалла — старшеклассник из Ванкувера, Британская Колумбия. Он очарован внешним миром и в настоящее время изучает новые технологии для защиты окружающей среды.![]() Чтобы не отставать,
Чтобы не отставать,
Подпишитесь на его I nstagram и его LinkedIn . Чтобы получить больше подобного контента, подпишитесь на его информационный бюллетень здесь.
python — изменить вектор numpy (n,) на вектор (n,1)
Задать вопрос
спросил
Изменено 2 года, 8 месяцев назад
Просмотрено 45 тысяч раз
Поэтому мне легче думать о векторах как о векторах-столбцах, когда мне нужно заняться линейной алгеброй. Поэтому я предпочитаю такие формы, как (n,1).
Существует ли значительная разница в использовании памяти между формами (n,) и (n,1)?
Какой способ предпочтительнее?
И как преобразовать (n,) вектор в (n,1) вектор. Каким-то образом b.reshape((n,1)) не помогает.
Каким-то образом b.reshape((n,1)) не помогает.
а = np.random.random ((10,1)) b = np.ones ((10,)) б.изменить((10,1)) печать (а) печать (б) [[ 0,76336295] [0,71643237] [0,37312894] [0,33668241] [0,55551975] [0,20055153] [0,01636735] [ 0,5724694 ] [0,96887004] [0,58609882]] [ 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.]
- питон
- numpy
2
Более простой способ с синтаксисом Python — использовать
b.reshape(-1,1)
, где система автоматически вычислит правильную форму вместо «-1»
1
ndarray.reshape() возвращает новое представление или копию (в зависимости от новой формы). Он не изменяет массив на месте.
б.изменить((10, 1))
как таковой фактически не является операцией, так как созданный вид/копия ничему не присваивается. «Исправить» просто:
b_new = b.