
Управление двигателем постоянного тока — схема и важные нюансы

Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление двигателем постоянного тока осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
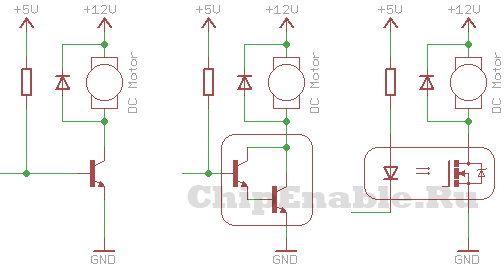
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.

Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.

Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.

Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
 Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику.

Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.

Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.

Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
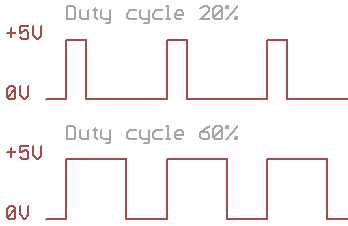
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
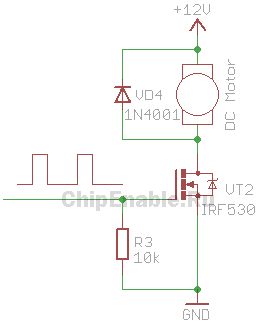
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
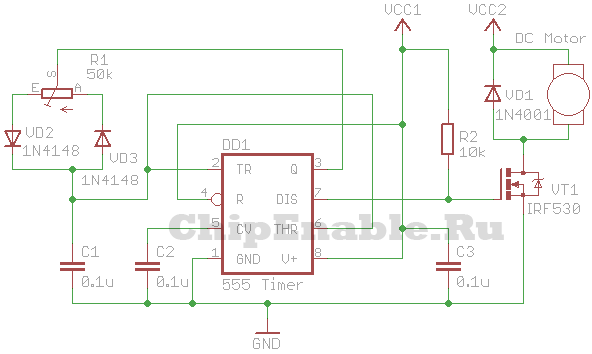
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
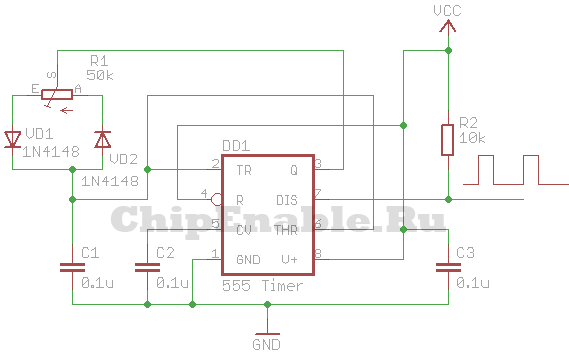
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
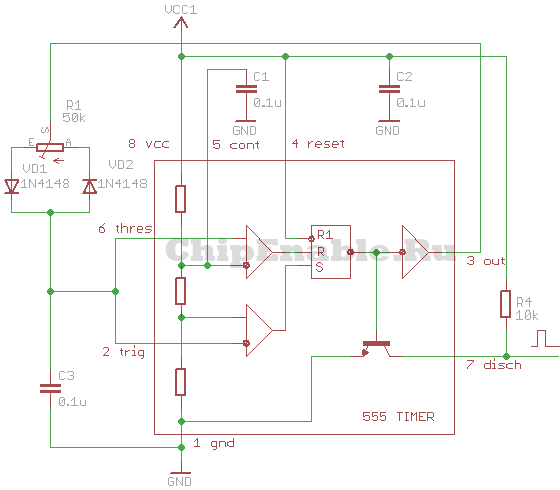
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Типовые схемы управления электроприводами с двигателями постоянного и переменного токов
1. Типовые схемы управления электроприводами с двигателями постоянного тока
Схема пуска двигателя постоянного тока с независимым возбуждением по принципу времени
Эта схема представлена на рис. 1.1, а. Она содержит кнопки управления SB1 (пуск) и SB2 (останов) двигателя, линейный контактор КМ1, обеспечивающий подключение двигателя к сети, и контактор ускорения КМ2 для шунтирования пускового резистора Rд. В качестве датчика времени в схеме используется электромагнитное реле времени КТ. При подключении схемы к источнику напряжения U происходит возбуждение двигателя и срабатывает реле КТ, размыкая свой размыкающий контакт в цепи катушки контактора КМ2 и подготавливая двигатель к пуску.
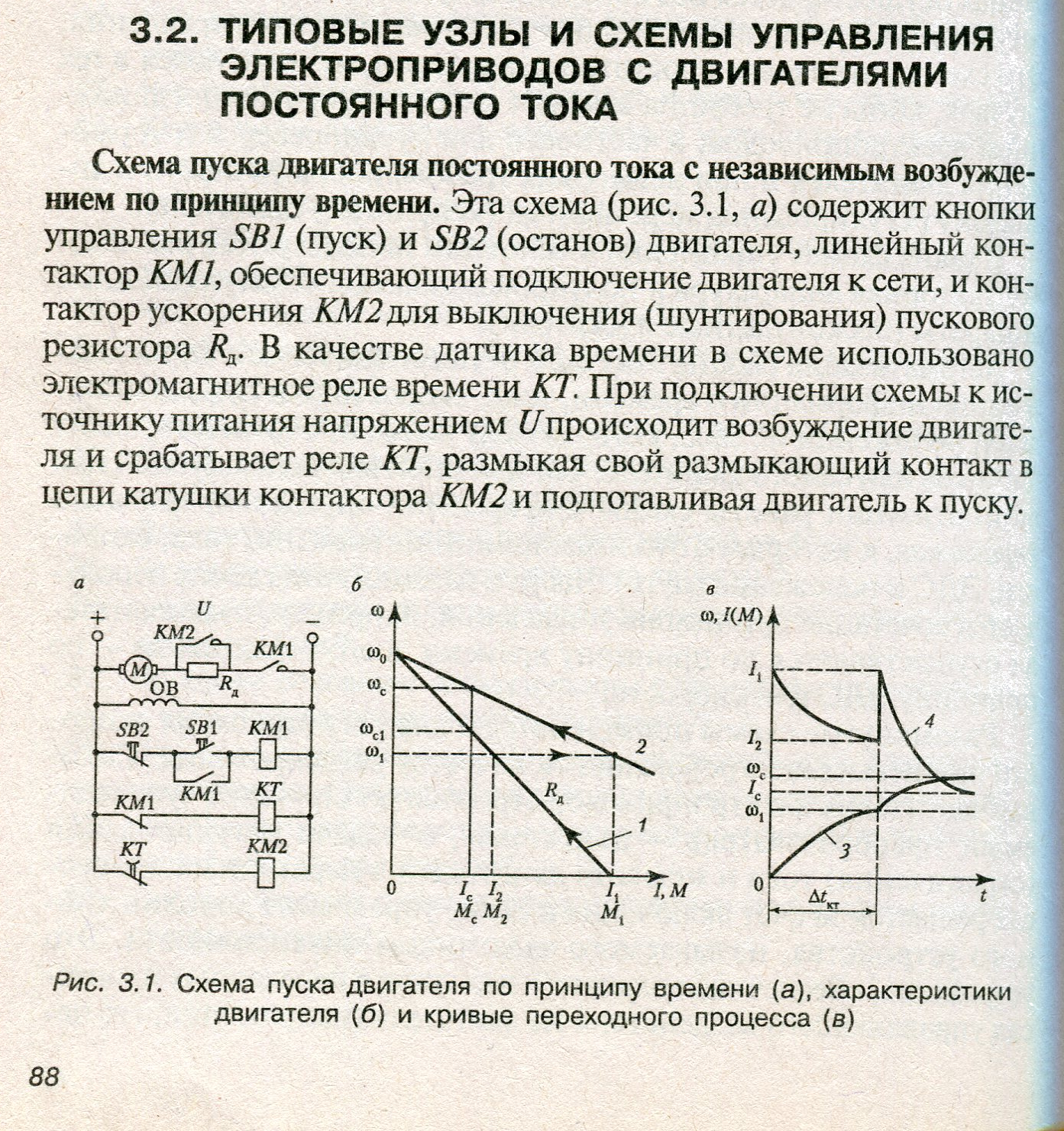
Рис. 1.1. Схема пуска двигателя по принципу времени (а), характеристики двигателя (б) и кривые переходного процесса (в)
Пуск двигателя начинается после нажатия кнопки SВ1, в результате чего получает питание контактор КМ1, который своим главным силовым контактом подключает двигатель к источнику питания. Двигатель начинает разбег с резистором Rд в цепи якоря, с помощью которого ограничивается пусковой ток двигателя. Одновременно замыкающий блок-контакт контактора КМ1 шунтирует кнопку SВ1, и она может быть отпущена, а размыкающий блок-контакт КМ1 разрывает цепь питания катушки реле времени КТ. Через интервал времени Δtк.т после прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ2, последний включится и главным контактом закоротит пусковой резистор Rд в цепи якоря. Таким образом, при пуске двигатель в течение времени Δtк.т разгоняется по искусственной характеристике 1 (рис. 1.1, б), а после шунтирования резистора Rд – по естественной 2. Значение сопротивления резистора Rд выбирается таким образом, чтобы в момент включения двигателя ток I1 в цепи и соответственно момент М1, не превосходили бы допустимого уровня.
За время Δtк.т после начала пуска частота вращения двигателя достигает значения ω1, а ток в цепи якоря снижается до уровня I2 (рис. 1, в). После шунтирования Rд, происходит бросок тока в цепи якоря от I2 до I1 который не превышает допустимого уровня. Изменение частоты вращения, тока и момента во времени происходит по экспоненте.
Останов двигателя осуществляется нажатием кнопки SВ2, что приведет к отключению якоря двигателя от источника питания и его торможению под действием момента сопротивления на валу. Такой способ останова двигателя получил название «торможение выбегом».
Схема пуска двигателя в две ступени по принципу ЭДС и динамического торможения по принципу времени.
В этой схеме (рис. 1.2, а) в качестве датчика ЭДС использован якорь двигателя, к которому подключены катушки контакторов ускорения КМ1 и КМ2, обеспечивающих шунтирование пусковых резисторов Rд1 и Rд2. С помощью регулировочных резисторов Rу1, и Rу2 , которые могут быть настроены на срабатывание при определенных частотах вращения двигателя.
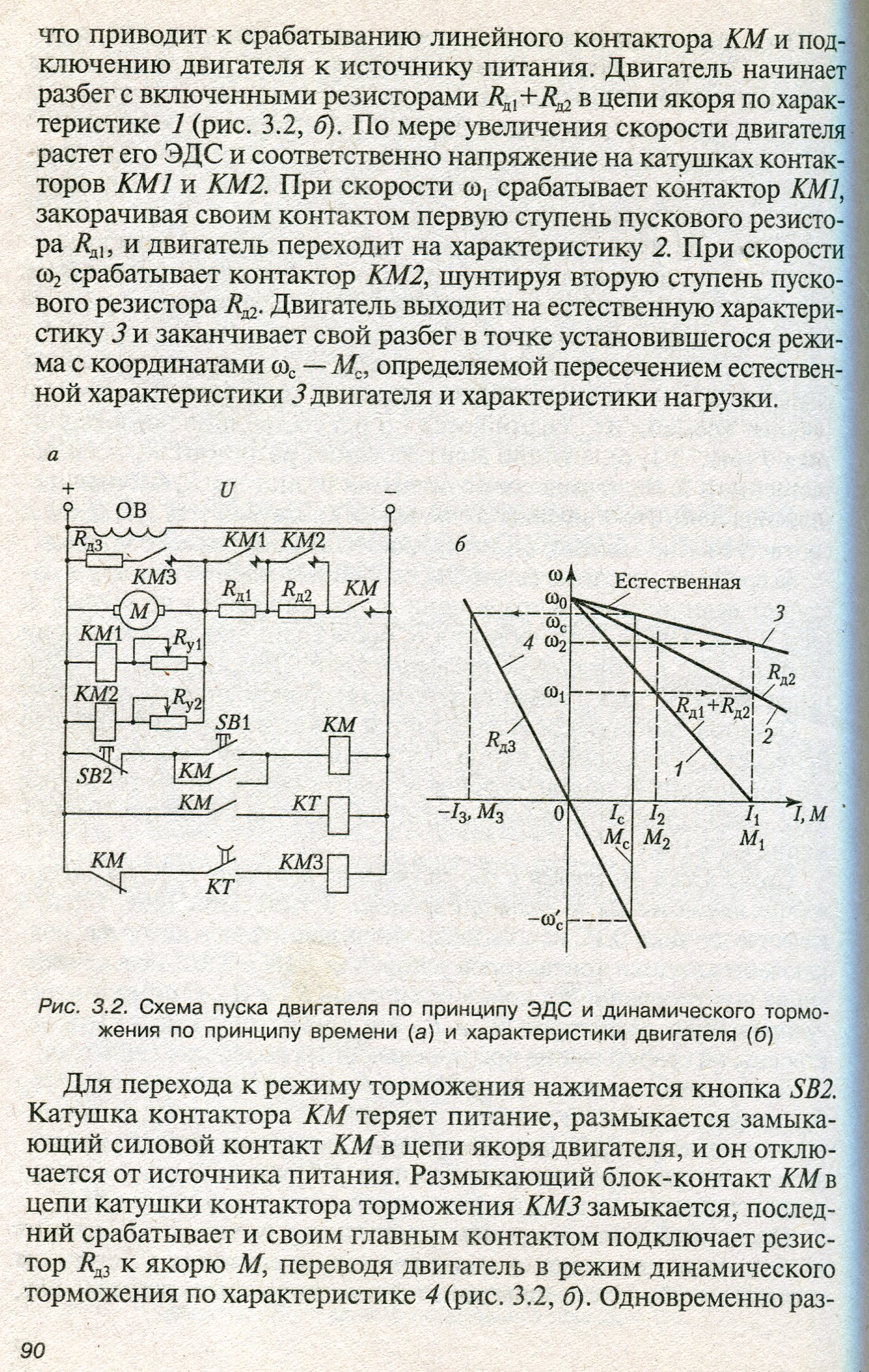
Рис. 1.2. Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б)
Для осуществления торможения в схеме предусмотрен резистор R3, подключение и отключение которого осуществляется контактором торможения КМЗ. Для обеспечения выдержки времени используется электромагнитное реле времени КТ, размыкающий контакт которого включен в цепь катушки контактора торможения КМ2.
После подключения схемы к источнику питания происходит возбуждение двигателя, а аппараты схемы остаются в исходном положении. Пуск двигателя осуществляется нажатием кнопки SВ1, что приводит к срабатыванию линейного контактора КМ и подключению двигателя к источнику питания. Двигатель начинает разбег с включенными резисторами Rд1 + Rд2 в цепи якоря по характеристике 1 (рис. 1.2, б). По мере увеличения частоты вращения двигателя растет его ЭДС и соответственно напряжение на катушках контакторов КМ1 и КМ2. При частоте вращения ω1 срабатывает контактор КМ1, закорачивая своим контактом первую ступень пускового резистора Rд1, и двигатель переходит на характеристику 2. При частоте вращения ω2 срабатывает контактор КМ2,шунтируя своим контактом вторую ступень пускового резистора Rд2. Двигатель переходит на естественную характеристику 3 и заканчивает свой разбег в точке установившегося режима с координатами ωс – Мс, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки.
Для перехода к режиму торможения нажимается кнопка SB2. Катушка контактора КМ теряет питание, размыкается замыкающий силовой контакт КМ в цепи якоря двигателя, и он отключается от источника питания. Размыкающий блок-контакт КМ3 замыкается, последний срабатывает и своим главным контактом подключает резистор Rд3 к якорю М, переводя двигатель в режим динамического торможения по характеристике 4 (рис. 1.2, б). Одновременно размыкается замыкающий контакт контактора КМ в цепи реле времени КТ, оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению частоты вращения двигателя до нуля, реле времени отключается и своим контактом разрывает цепь питания контактора КМЗ. Резистор Rд3 отключается от якоря М двигателя, торможение заканчивается, и схема возвращается в свое исходное положение.
Применение динамического торможения обеспечивает более быстрый останов двигателя и тем самым быстрое прекращение движения исполнительного органа рабочей машины.
Схема пуска двигателя в одну ступень по принципу времени и динамического торможения по принципу ЭДС.
Управление двигателем при пуске происходит по аналогии со схемой рис. 1.1. При включении двигателя в этой схеме (рис. 1.3) и работе от источника питания размыкающий контакт линейного контактора КМ в цепи контактора торможения КМ2 разомкнут, что предотвращает перевод двигателя в режим торможения.
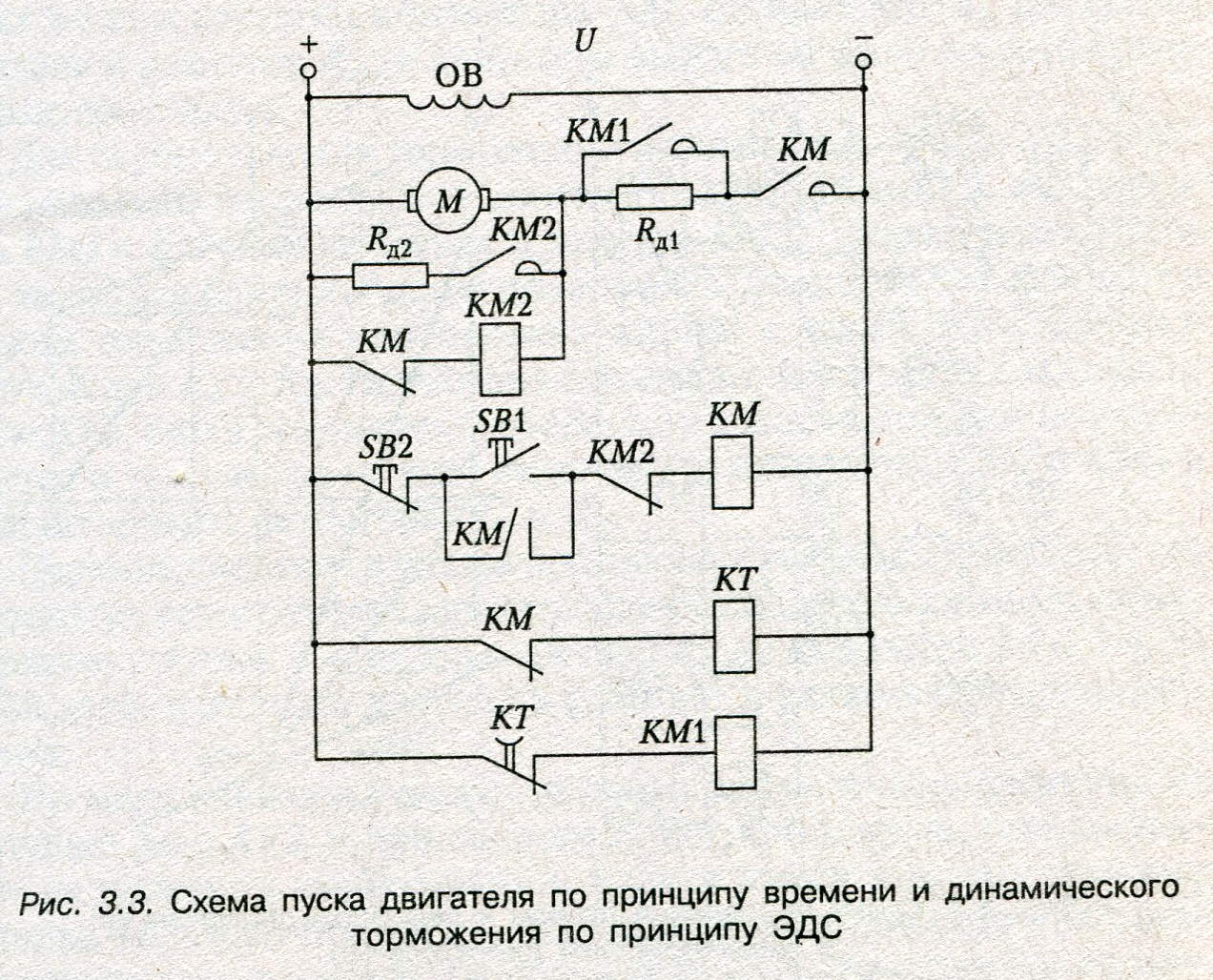
Рис. 1.3. Схема пуска двигателя по принципу времени и динамического торможения по принципу ЭДС
Торможение осуществляется нажатием кнопки SВ2. Контактор КМ, потеряв питание, отключает якорь двигателя от источника питания и замыкает своим контактом цепь питания катушки контактора КМ2. Последний от действия наведенной в якоре ЭДС срабатывает и замыкает якорь М на резистор торможения Rд1. Процесс динамического торможения происходит до тех пор, пока при небольшой частоте вращения двигателя его ЭДС не станет меньше напряжения отпускания контактора КМ2, который отключится, и схема вернется в исходное положение.
Схема управления пуском двигателя по принципу времени, реверсом и торможением противовключением по принципу ЭДС
В этой схеме (рис. 1.4, а) предусмотрено два линейных контактора КМ1 и КМ2, обеспечивающих его вращение соответственно в условных направлениях «Вперед» и «Назад». Главные контакты этих аппаратов образуют реверсивный контактный мостик, с помощью которого можно изменить полярность напряжения на якоре М и тем самым осуществлять торможение противовключением и реверс (изменение направления вращения) двигателя. В якорной цепи помимо пускового резистора Rд1 включен резистор противовключения Rд2, который управляется контактором противовключения КМЗ.
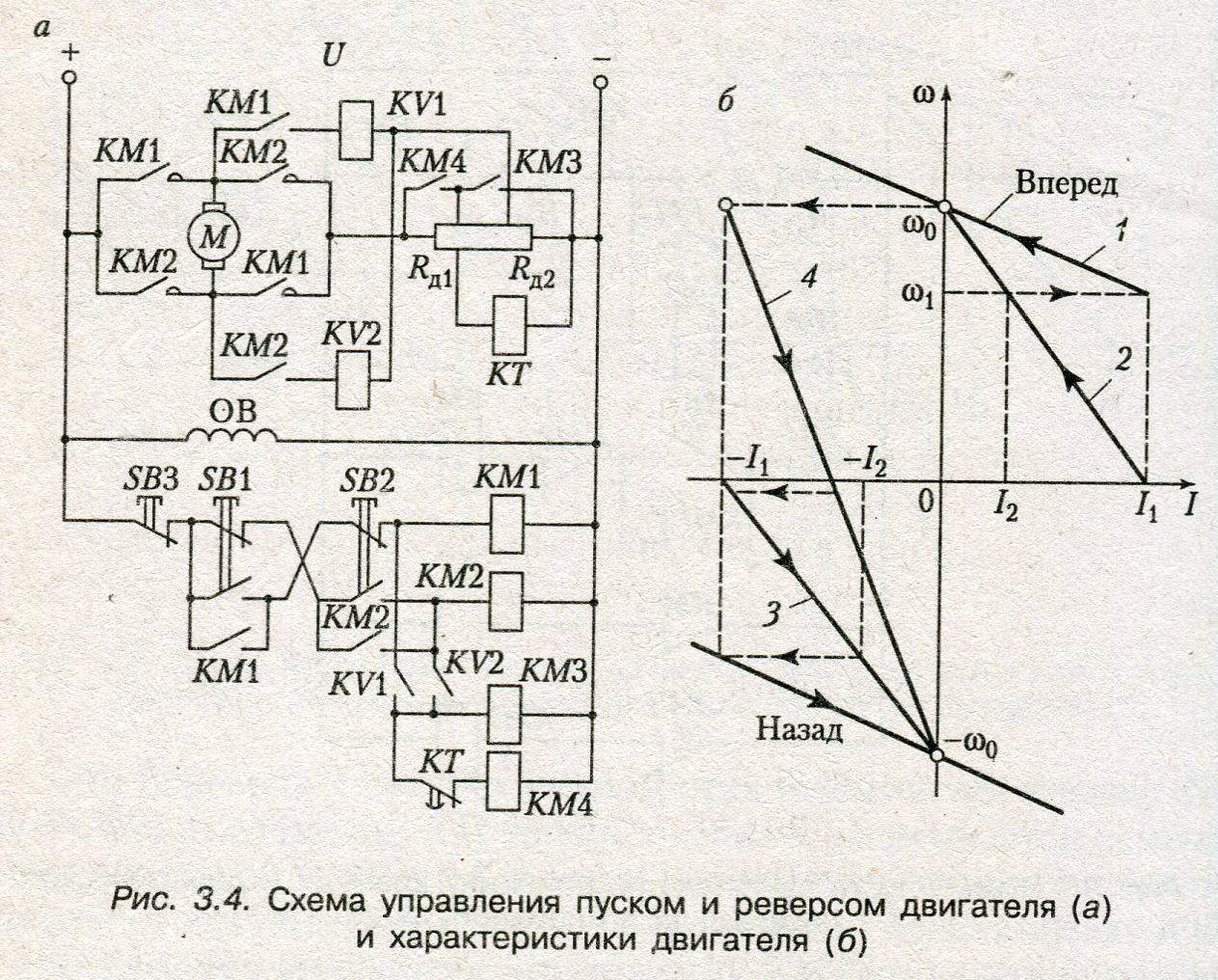
Рис. 1.4. Схема управления пуском и реверсом двигателя (а) и характеристики двигателя (б)
Управление двигателем при торможении противовключением и реверсе осуществляется с помощью двух реле противовключения КV1 и КV2. Их назначение в том, чтобы в режиме противовключения для ограничения тока в якоре до допустимого уровня обеспечить ввод в цепь якоря в дополнение к пусковому резистору Rд1, резистор противовключения Rд2, что достигается выбором точки присоединения катушек реле КV1 и КV2 к резистору (Rд1 + Rд2).
Пуск двигателя в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки SВ1 срабатывает контактор КМ1 и подключает якорь М к источнику питания. За счет падения напряжения на резисторе Rд1, от пускового тока срабатывает реле времени КТ, размыкающее свой контакт в цепи контактора КМ.
Включение КМ1 приведет также к срабатыванию реле КV1, которое замкнет свой замыкающий контакт в цепи контактора противовключения КМЗ. Это вызовет включение КМЗ, что приведет к закорачиванию ненужного при пуске резистора противовключения Rд2 и одновременно катушки реле времени КТ. Двигатель начнет разбег по характеристике 2 (рис. 1.4, б), а реле времени КТ – отсчет выдержки времени.
По истечении выдержки времени реле КТ замкнет свой контакт в цепи катушки контактора КМ, он включится, закоротит пусковой резистор Rд1 и двигатель выйдет на свою естественную характеристику 1.
Для осуществления торможения нажимается кнопка SВ2, в результате чего отключаются контактор КМ1, реле КV1, контакторы КМЗ и КМ4 и включается контактор КМ2. Напряжение на якоре двигателя изменяет свою полярность, и двигатель переходит в режим торможения противовключением с двумя резисторами в цепи якоря Rд1 и Rд2. Несмотря на замыкание контакта КМ2 в цепи реле КV2, оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратам КМЗ и КМ4 и зашунтировать резисторы Rд1 и Rд2.
Перевод двигателя в режим противовключения соответствует его переходу с естественной характеристики 1 на искусственную характеристику 4 (рис. 1.4, б). Во всем диапазоне частот вращения 0 < ω < ω0 на этой характеристике двигатель работает в режиме противовключения.
По мере снижения частоты вращения двигателя растет напряжение на катушке реле КV2, и при частоте вращения, близкой к нулю, оно достигнет напряжения срабатывания. Если к этому моменту времени кнопка SВ2 будет отпущена, то отключается контактор КМ2, схема возвращается в исходное положение и на этом процесс торможения заканчивается.
Если же при достижении малой частоты вращения кнопка SВ2 остается нажатой, то включается реле КV2 и процесс пуска двигателя повторяется, но уже в противоположную сторону. Таким образом, реверсирование двигателя включает в себя два этапа: торможение противовключением и пуск в противоположном направлении. Второй этап реверса изображен на рис. 1.4, б переходом двигателя с характеристики 4 на характеристику 3, соответствующую обратной полярности напряжения на якоре двигателя и наличию в якоре добавочного резистора Rд1.
Схема пуска двигателя постоянного тока с последовательным возбуждением по принципу тока
В этой схеме (рис. 1.5) используется реле тока КА, катушка которого включена в цепь якоря М, а размыкающий контакт – в цепь питания контактора ускорения КМ2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I2 (см. рис. 1.1, б). В схеме используется также дополнительное блокировочное реле КV с временем срабатывания большим, чем у реле КА.
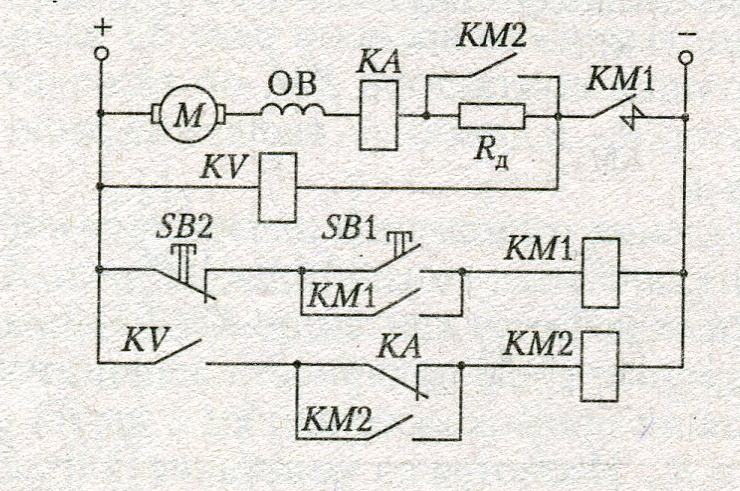
Рис. 1.5. Схема пуска двигателя по принципу тока
Работа схемы при пуске происходит следующим образом. После нажатия на кнопку SВ1 срабатывает контактор КМ1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ1 вызовет срабатывание реле тока КА, которое разомкнет свой размыкающий контакт в цепи контактора КМ2. Через некоторое время после этого срабатывает КV и замыкает свой замыкающий контакт в цепи контактора КМ2, подготавливая его к включению.
По мере разбега двигателя ток якоря снижается до значения тока переключения I2. При этом токе отключается реле тока и замыкает свой размыкающий контакт в цепи катушки контактора КМ2. Последний срабатывает, его главный контакт закорачивает пусковой резистор Rд, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА. Поэтому вторичное включение реле тока КА после закорачивания Rд и броска тока не вызовет отключения контактора КМ2 и двигатель продолжит разбег по своей естественной характеристике.
Схема типовой панели управления двигателем, обеспечивающая пуск, динамическое торможение и регулирование частоты вращения ослаблением магнитного потока
Типовые релейно-контакторные схемы управления ЭП содержат элементы блокировок, защит, сигнализации, а также связи с технологическим оборудованием. Для унификации схемных решений электротехническая промышленность выпускает стандартные станции, блоки и панели управления, специализированные по видам ЭП рабочих механизмов, функциональным возможностям, условиям эксплуатации, роду тока и т.д. Ниже в качестве примера рассмотрена схема одного из таких типовых устройств (рис. 1.6).
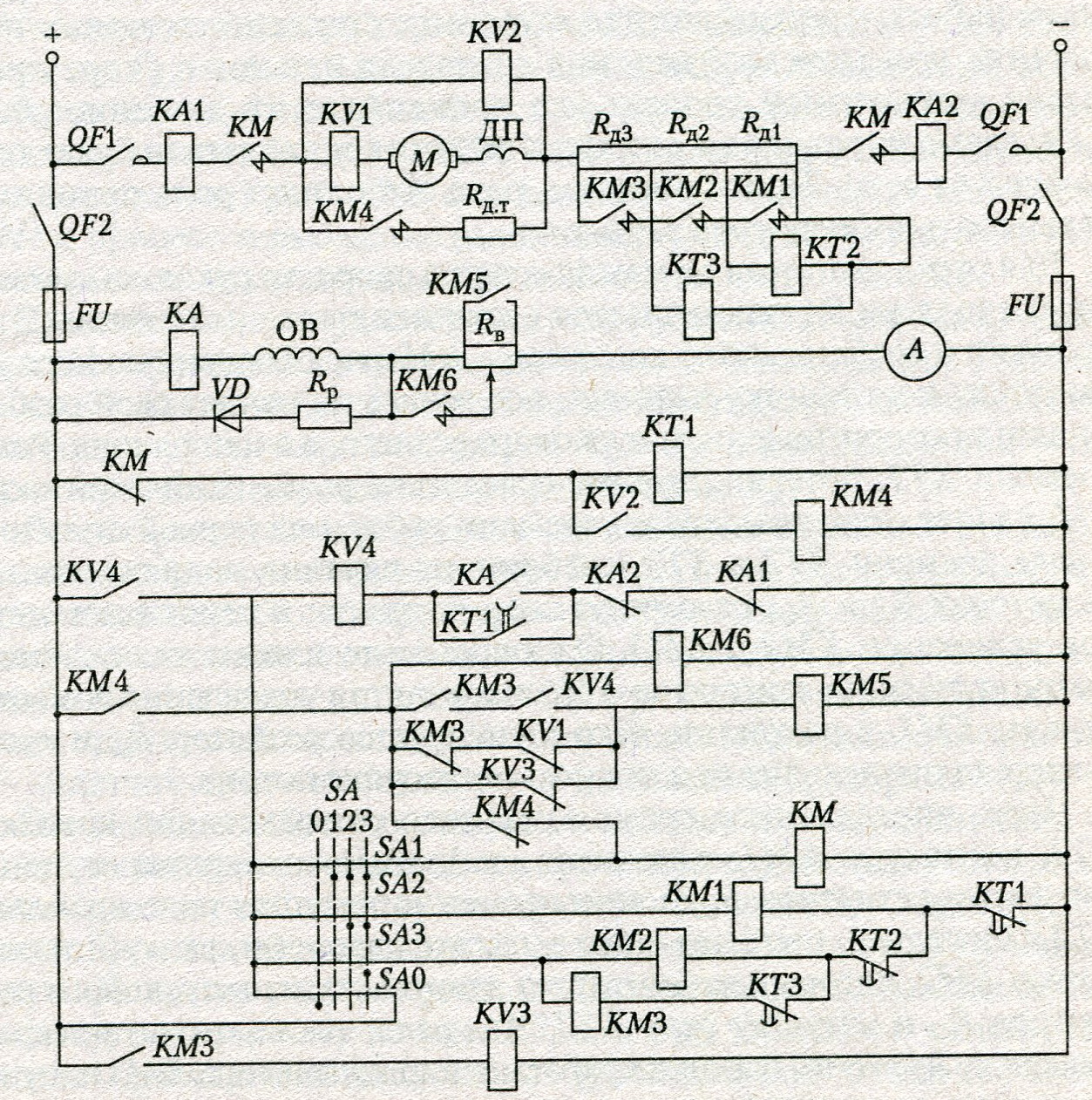
Рис. 1.6. Схема типовой панели управления двигателем
Органом управления в этой схеме является командоконтроллер SА, имеющий четыре положения рукоятки: одно нулевое (начальное) и три рабочих (см. рис. 1.6). Пуск двигателя осуществляется в три ступени по принципу времени, торможение – динамическое по принципу ЭДС.
Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются автоматические выключатели QF1 и QF2 и ЭП подключается к источнику питания. По обмотке ОВ возбуждения начинает протекать ток возбуждения, и, кроме того, срабатывает реле времени КТ1, шунтируя в цепи реле контроля напряжения своим контактом контакт реле КА обрыва цепи обмотки возбуждения. Если при этом реле максимального тока КА1 и КА2 находятся в нормальном (отключенном) положении, то срабатывает реле КV4, подготавливая питание схемы управления через свой замыкающий контакт. Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения двигателя или ток в якоре превысит допустимый уровень, то произойдет отключение реле КV4, схема управления лишится питания и двигатель будет отключен от сети. Таким образом, реле выполняет роль исполнительного элемента трех защит.
Для пуска двигателя до максимальной частоты вращения рукоятка командоконтроллера SА перемещается в крайнее третье положение. Это приведет к срабатыванию контактора КМ и подключению якоря М двигателя к источнику питания, после чего он начнет свой разбег с полным сопротивлением пускового резистора в цепи якоря. Реле времени КТ1, потеряв питание вследствие размыкания контакта КМ, начнет отсчет выдержки времени работы на первой ступени, а реле времени КТ2 и КТЗ, сработав от падения напряжения на резисторах Rд1 и Rд2, разомкнут свои контакты в цепях контакторов ускорения КМ2 и КМ3. Одновременно с этим включаются «экономический» контактор КМ6 и контактор управления возбуждением КМЗ, в результате чего шунтируется резистор Rв и пуск двигателя происходит при полном магнитном потоке.
Через определенное время замкнется размыкающий контакт КТ1, контактор КМ1 включится, зашунтирует первую ступень пускового резистора Rд1 и одновременно катушку реле времени КТ2. Последнее, отсчитав свою выдержку времени, включит контактор КМ2, который зашунтирует вторую ступень пускового резистора Rд2 и катушку реле КТЗ. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактора КМЗ и шунтирование последней ступени пускового резистора, после чего двигатель выходит на свою естественную характеристику.
После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое подготавливается включением реле КVЗ срабатывания КМЗ. В процессе ослабления тока возбуждения с помощью реле управления КV1 обеспечивается контроль за током якоря. При бросках тока реле КV1 обеспечивает включение или отключение контактора КМЗ, усиливая или ослабляя ток возбуждения, в результате чего ток в якорной цепи не выходит за допустимые пределы. При размыкании контакта КМ5 часть тока возбуждения замыкается через диод VD и разрядный резистор Rр.
Торможение двигателя осуществляется перестановкой рукоятки командоконтроллера SА в нулевое положение. Это приводит к выключению контактора КМ и отключению якоря М от источника питания. Поскольку в процессе пуска двигателя реле динамического торможения КV2 включилось, замыкание размыкающего контакта КМ в цепи контактора торможения КМ4 вызовет его включение. Резистор Rдт окажется подключенным к якорю М двигателя, который перейдет в режим динамического торможения. При малых частотах вращения двигателя, когда его ЭДС станет ниже напряжения отпускания (удержания) реле КV2, оно отключится, выключит контактор КМ4 и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке.
Для снижения частоты вращения двигателя рукоятка командоконтроллера SА переводится в положения 1 или 2. В положении 1 двигатель работает на искусственной характеристике, соответствующей наличию в цепи якоря резисторов Rд2 + Rд3, а в положении 2 —на характеристике, обусловленной резистором Rд3.
Транзисторное управление двигателями в схемах на микроконтроллере
Электрический двигатель — это машина, преобразующая электрическую энергию в механическую. Первые электродвигатели появились в середине 19 века. Успехи в их разработке связывают с именами таких выдающихся физиков и инженеров, как Н.Тесла, Б.Якоби, Г.Феррарис, В.Сименс.
Различают электро двигатели постоянного и переменного тока. Преимущество первых заключается в возможности экономичного и плавного регулирования частоты вращения вала. Преимущество вторых — большая удельная мощность на единицу веса. В микроконтроллерной практике часто применяют низковольтные двигатели постоянного тока, используемые в бытовых и компьютерных вентиляторах (Табл. 2.13). Встречаются также конструкции с сетевыми двигателями.
Таблица 2.13. Параметры вентиляторов фирмы Sunon
Обмотку двигателя следует рассматривать как катушку с большой индуктивностью, поэтому её можно коммутировать обычными транзисторными ключами (Рис. 2.78, а…т). Главное — это не забыть про защиту от ЭДС самоиндукции.
В двигателях постоянного тока имеется возможность изменять направление вращения ротора в зависимости от полярности рабочего напряжения. В таких случаях широко используют мостовые схемы «Н-bridge» (Рис. 2.79, а…и).
Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи (начало):
а) регулирование скорости потока воздуха вентилятора M1. Конденсатор С/ уменьшает ВЧ- помехи. Диод VD1 защищает транзистор VT1 от выбросов напряжения. Резистор R1 определяет степень насыщения транзистора Г77, а резистор R2 закрывает его при рестарте MK. Частота импульсов ШИМ на выходе МК должна быть не менее 30 кГц, т.е. за пределами звукового диапазона, чтобы исключить неприятный «свист». Элементы С/ и R2 могут отсутствовать;
б) плавное регулирование частоты вращения вала двигателя M1 через канал ШИМ. Конденсатор С/ является первичным, а конденсатор С2— вторичным фильтром сигналов ШИМ; О
Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
(продолжение):
в) транзисторы VT1, VT2 соединяются параллельно для увеличения суммарного коллекторного тока. Резисторы R1, R2 обеспечивают равномерную нагрузку по мощности на оба транзистора, что связано с разбросом у них коэффициентов И2]Э и ВАХ переходов «база — эмиттер»;
г) двигатель M1 (фирма Airtronics) имеет «цифровой» вход управления, что позволяет подключать к нему MK напрямую. Транзисторные ключи (драйверы) находятся внутри двигателя;
д) два отдельных источника питания позволяют значительно снизить влияние на MK электрических помех, которые генерирует двигатель M1. Система будет работать устойчивее. GB1 — это маломощная литиевая батарея, GB2, GB3 — это пальчиковые гальванические элементы с общим напряжением 3.2 В и мощностью, достаточной для запуска и работы двигателя M1\
е) параллельные резисторы R2, R3 служат ограничителями тока, протекающего через двигатель M1. Кроме того, они стабилизируютток в нагрузке, если транзистор VT1 находится в активном режиме или на грани входа в режим насыщения;
ж) MK включает/выключает двигатель M1. Резистором R3 подстраивается частота оборотов его вала. Стабилизатором служит «магнитофонная» микросхема DA1 фирмы Panasonic. С её помощью на зажимах двигателя M1 поддерживаются постоянные параметры, которые практически не зависят от колебаний температуры и напряжения питания;
з) дроссели L7, L2 и конденсаторы C7, С2фильтруют излучаемые двигателем радиопомехи. С той же целью двигатель помещается в заземлённый экранированный корпус;
Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
(продолжение):
и) вибромотор M1 является источником мощных электромагнитных и радиочастотных помех. Элементы L/, L2, C1 служат фильтрами. Резистор R2 ограничивает пусковой ток через два приоткрытом транзисторе VT1 Диоды VD1, УА2срезаютвершиныимпульсныхпомех;
к) элементы VD1, C1 и VD2, &2фильтруют помехи по питанию, которые генерирует двигатель M1 в направлении к MK. Частоту оборотов вала двигателя можно плавно регулировать через канал ШИМ MK, при этом отдельный ФНЧ не требуется, поскольку двигатель имеет большую инерцию и сам сглаживает проходящие через него ВЧ-импульсы тока;
л) применение ключа на полевом транзисторе VT1 повышает КПД по сравнению с ключом на биполярном транзисторе, ввиду более низкого сопротивления «сток — исток». Резистор R1 ограничивает амплитуду наводок, которые могут «просачиваться» от работающего двигателя M1 во внутренние цепи MK через ёмкость «затвор — сток» транзистора VT1;
м) транзистор VT2 является мощным силовым ключом, который подаёт питание на двигатель ML а транзистор VT1 — демпфером, который быстро тормозит вращение вала после выключения. Резистор R1 снижает нагрузку на выход MK при заряде ёмкостей затворов полевых транзисторов VT1, VT2. Резистор Я2отключаетдвигатель M1 при рестарте MK;
н) ключ на транзисторах VT1, VT2 собран по схеме Дарлингтона и имеет большое усиление. Для регулирования скорости вращения вала двигателя M1 может применяться метод ШИМ или фазо-импульсное управление. Система не имеет обратной связи, поэтому при снижении скорости вращения из-за внешнего торможения будет уменьшаться рабочая мощность на валу;
Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
(продолжение):
м) встраивание MK в уже существующий тракт регулирования скорости вращения вала двигателя Ml. В этот тракт входят все элементы схемы, кроме резистора R2. Резистором R4 выставляется «грубая» частота вращения. Точная подстройка осуществляется импульсами с выхода MK. Возможна организация обратной связи, когда МК следит за каким-либо параметром и динамично подстраивает скорость вращения в зависимости от напряжения питания или температуры;
о) скорость вращения вала двигателя M1 определяется скважностью импульсов в канале ШИМ, генерируемых с нижнего выхода MK. Основным коммутирующим ключом служит транзистор VT2.2, остальные транзисторные ключи участвуют в быстрой остановке двигателя M1 по сигналу ВЫСОКОГО уровня с верхнего выхода MK;
п) плавное регулирование частоты оборотов вала двигателя M1 производится резистором R8. ОУ ТШ служит стабилизатором напряжения с двойной обратной связью через элементы R1, R8, C2 и R9, R10, C1. Комбинацией уровней с трёх выходов MK (ЦАП) можно ступенчато изменять скорость вращения вала двигателя M1 (точный подбор резисторами R2…R4). Линии MK могут переводиться в режим входа без « pull-up» резистора для увеличения числа «ступенек» ЦАП;
Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи (окончание):
p) фазо-импульсное управление двигателем переменного тока M1. Чем большее время за период сетевого напряжения открыт транзистор VT1, тем быстрее вращается вал двигателя;
с) включение мощного двигателя переменного тока Ml производится через оптотиристор KS7, который обеспечивает гальваническую развязку от цепей MK;
т) аналогично Рис. 2.78, п, но с одним кольцом обратной связи через элементы C7, R6, R8. Резистор R4 регулирует частоту вращения вала двигателя Ml плавно, а MK — дискретно.
Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (начало):
а) направление вращения вала двигателя Ml изменяется мостовой «механической» схемой на двух группах контактов реле KL1, K1.2. Частота переключения контактов реле должна быть низкой, чтобы быстро не выработался ресурс. Дроссели L7, L2 снижают коммутационные токи при переключении реле и, соответственно, уровень излучаемых электромагнитных помех;
Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (продолжение):
б) при ВЫСОКОМ уровне на верхнем и НИЗКОМ уровне на нижнем выходе МК транзисторы К77…к ТЗ открываются, а транзисторы КГ4…КГ6закрываются,инаоборот. Когда полярность питания двигателя Ml изменяется на противоположную, то его ротор вращается в обратную сторону. Сигналы с двух выходов МК должны быть противофазными, но с небольшой паузой НИЗКОГО уровня между импульсами, чтобы закрыть оба плеча (устранение сквозных токов). Диоды VD1..VD4уменьшают выбросы напряжения, тем самым защищая транзисторы от пробоя;
в) аналогично Рис. 2.79, б, но с другими номиналами элементов, а также с аппаратной защитой от одновременного открывания транзисторов одного плеча при помощи диодов VD3, VD4. Диоды VD1, КД2повышают помехоустойчивость при большом расстоянии до MK. Конденсатор С/ снижает «искровые» импульсные радиопомехи, генерируемые двигателем Ml;
Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (продолжение):
г) аналогично Рис. 2.79, б, но с отсутствием «запирающих» резисторов в базовых цепях транзисторов VT2, VT4. Расчётнато,чтообмоткадвигателяЛ//достаточнонизкоомная,следователо, при рестарте МК внешние помехи на «висящих в воздухе» базах транзисторов VT1 VT2, VT4, VT6 не смогут открыть их коллекторные переходы;
д) аналогично Рис. 2.79, б, но с максимальным упрощением схемы. Рекомендуется для устройств, выполняющих второстепенные функции. Напряжение питания +Еи должно соответствовать рабочему напряжению двигателя M1\
е) в отличие от предыдущих схем, транзисторы VT1…VT4 включаются по схеме с общим эмиттером и управляются ВЫСОКИМ/НИЗКИМ уровнем непосредственно с выходов MK. Двигатель M1 должен быть рассчитан на рабочее напряжение 3…3.5 В. Диоды VD1… VD4 уменьшают выбросы напряжения. Фильтр LL C1 снижает импульсные помехи по питанию от двигателя M1, которые могут приводить к сбоям в работе MK. Встречающиеся замены деталей: VT1 VT3- KT972; VT2, VT4- KT973; VD1…VD4- КД522Б, Rx = 3.3 кОм; R2 = 3.3 кОм;
ж) мостовая схема на четырёх управляющих транзисторах VT1 VT2, VT4, VT5 структуры р—п—р. Подстроечным резистором R4 регулируется напряжение на двигателе Ml, а значит, и частота оборотов сразу для двух направлений вращения ротора;
Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (окончание):
з) мостовая схема для управления мощным двигателем Ml (24 В, 30 А). Смена полярности напряжения на двигателе производится противофазными уровнями на средних выходах MK, а скорость вращения — методом ШИМ на верхнем и нижнем выходах MK;
и) транзисторы VT2, VT5 подают питание на мостовую схему управления двигателем Ml. Их запараллеливание позволяет подключить к диоду VD1 ещё одну такую же схему.
Источник: Рюмик, С. М., 1000 и одна микроконтроллерная схема. Вып. 2 / С. М. Рюмик. — М.:ЛР Додэка-ХХ1, 2011. — 400 с.: ил. + CD. — (Серия «Программируемые системы»).
2.2. Типовые узлы схем автоматического управления двигателями постоянного тока
Рассмотрим ряд типовых узлов схем управления электроприводами, реализующими вышеописанные принципы управления. На рис. 2.2, а приведен узел электрической схемы, обеспечивающий автоматический пуск в функции времени двигателя М с двумя ступенями добавочного пускового сопротивления (вид возбуждения двигателя может быть любым, на рисунке показано независимое возбуждение).
Алгоритм работы приведенного узла схемы следующий. Сразу же после подачи напряжения на главные цепи и цепи управления включается реле времени первой ступени РУ1 и открывает свой размыкающий контакт, не давая возможности преждевременно включиться контакторам ускорения КУ 1 и КУ 2.
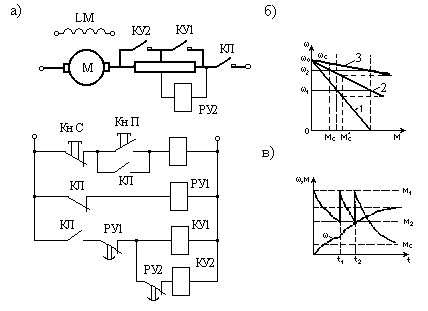
Рис. 2.2. Схема реостатного пуска двигателя постоянного тока в функции времени
Нажатие на кнопку КнП («Пуск») приводит к включению линейного контактора КЛ, который замыкает свой главный контакт в цепи якоря двигателя, замыкающим блок-контактом шунтирует кнопку КнП (тем самым контактор КЛ становится на самопитание), а размыкающим блок-контактом разрывает цепь катушки реле РУ1. Двигатель начинает разгоняться по реостатной механической характеристике первой ступени пуска (рис. 2.2, б). При протекании по добавочному сопротивлению пускового тока мгновенно срабатывает реле времени второй ступени РУ2, так как к его катушке прикладывается достаточное по величине напряжение, равное падению напряжения на сопротивлении Rдоб.п.1. Размыкающий контакт реле РУ2 открывается в цепи катушки контактора КУ2.
Реле РУ1, начавшее отсчет выдержки времени, соответствующей времени t1 разгона двигателя на первой ступени пуска, по истечении ее замыкает свой контакт. Включается контактор КУ1, который своим силовым контактом закорачивает сопротивление Rдоб.п.1 и вместе с ним катушку реле РУ2. Начинается разгон двигателя согласно реостатной характеристике 2 второй ступени пуска. Реле РУ2 отсчитывает выдержку времени, соответствующую времени (t2 – t1) двигателя на второй ступени, и затем замыкает свой контакт. Включается контактор КУ2 и закорачивает сопротивление Rдоб.п.2. Двигатель выходит на естественную характеристику 3 и разгоняется до установившейся скорости ωс, соответствующей моменту Мс. На этом пуск заканчивается.
На рис. 2.2, в показаны зависимости
момента и скорости двигателя от
времени, которые дополнительно
иллюстрируют работу описанного узла
схемы управления. Уставка реле времени РУ1 определится
как разность между временем t1 и собственным временем
включения
контактора КУ1:  .
Аналогично определится и уставка реле
времениРУ2:
.
Аналогично определится и уставка реле
времениРУ2:  .
При этомt1 = Δt1 и t2 – t1 = Δt2 — расчетные значения
времени разгона двигателя на первой и
второй ступенях (см. формулу (2.1)).
.
При этомt1 = Δt1 и t2 – t1 = Δt2 — расчетные значения
времени разгона двигателя на первой и
второй ступенях (см. формулу (2.1)).
Достоинством принципа управления в функции времени — это простота и надежность реле времени, удобство регулировки их уставок, возможность применения однотипных реле для двигателей различной мощности. Кроме того, при изменениях статического момента, момента инерции привода, напряжения сети и т.д. время пуска практически не изменяется. Например, при увеличении Мс до значения М’с (рис. 2.2, б) при сохранении той же выдержки времени реле РУ1 двигатель на первой ступени разгонится до меньшей скорости, но бросок момента при переключении будет большим. В результате процесс разгона пойдет в соответствии с графиком, показанным на рис. 2.2, б штрихпунктирными линиями, таким образом, что средний динамический момент при пуске останется приблизительно тем же. Поэтому почти не изменится и общее время пуска. Если же бросок момента (тока якоря) превысит допустимое значение, то двигатель отключится максимально-токовой защитой. При управлении в функции времени (в отличие от управления в функции скорости или тока) полностью устраняется опасность «застревания» двигателя на первой ступени пуска при М’с > М2. Все это и обусловило широкое распространение управления пуском в функции времени.
На рис. 2.3, а приведен узел
схемы автоматического управления пуском
двигателя постоянного тока в функции
скорости. Контроль скорости в приведенном
узле схемы осуществляется косвенным
образом. С этой целью в узле схемы,
показанном на рис. 2.3, а, катушки контакторов
ускорения КУ1 и КУ2 непосредственно
подключены на зажимы якоря двигателя
независимого возбуждения, т.е. на
напряжение ия, отличающееся от
ЭДС якоря ея только на величину
падения напряжения в сопротивлении
якоря Rя. Поскольку ЭДС якоря
двигателя при постоянном магнитном
потоке, в данном случае номинальном
потоке Фном,
пропорциональна скорости двигателя
( ),
то рассматриваемый узел схемы
осуществляет управление пуском в функции
скорости с ее косвенным контролем,
т.е. в функции ЭДС.
),
то рассматриваемый узел схемы
осуществляет управление пуском в функции
скорости с ее косвенным контролем,
т.е. в функции ЭДС.
При определенных значениях напряжения на якоре uя1 и uя2 контакторы КУ1 и КУ2 включаются, закорачивая ступени пускового реостата.
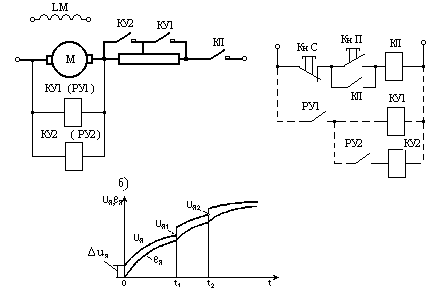
Рис. 2.3. Схема реостатного пуска двигателя постоянного тока в функции скорости
Алгоритм работы приведенного узла схемы следующий. Пуск двигателя начинается после нажатия на кнопку КнП и включения линейного контактора КЛ. В самом начале пуска напряжение на катушках контакторов КУ1 и КУ2 мало и равно падению напряжения Δuя на якоре от начального броска пускового тока. Поэтому контакторы не могут сработать, и в цепь якоря введено сопротивление обеих ступеней Rдоб.п.1 и Rдоб.п.2. По мере увеличения скорости двигателя его ЭДС возрастает. При токе якоря I2 и скорости ω1 напряжение на катушке контактора КУ1 становится равным напряжению срабатывания контактора КУ1
 (рис.
2.3,б)
(рис.
2.3,б)
Контактор КУ1 включается и закорачивает
первую ступень сопротивления Rдоб.п.1.
В конце разгона на второй ступени пуска,
когда напряжение на якоре достигнет
значения  ,
включается контакторКУ2,
и закорачивает
вторую ступень сопротивления Rдоб.п.2,
и двигатель выходит на естественную
характеристику.
,
включается контакторКУ2,
и закорачивает
вторую ступень сопротивления Rдоб.п.2,
и двигатель выходит на естественную
характеристику.
Очевидно, что значения напряжений срабатывания контакторов КУ1 иКУ2(uсраб.КУ1 и uсраб.КУ2) существенно отличаются друг от друга. Сами возможности регулировки напряжения срабатывания у контакторов весьма ограниченны. Поэтому практически всегда для контроляЭДСприменяют реле напряжения(РУ1 и РУ2), которые затем включают контакторыКУ1 иКУ2 (это показано на рис. 2.3, а штрих пунктирными линиями). Но тогда теряется основное положительное качество схемы — ее простота.
Как указывалось ранее, управление в функции тока применяется при разгоне двигателя независимого возбуждения путем ослабления магнитного потока. На рис. 2.4, а приведен узел схемы, реализующий этот принцип управления (на рисунке для упрощения не показаны цепи катушек контакторов КЛ, КУ1 и КУ2). Контроль тока якоря Iя осуществляется токовым реле РУП. Алгоритм работы данного узла с момента включения контактора КУ2, (т.е. с момента выхода двигателя на естественную характеристику) следующий. При замыкании главного контакта КУ2 от броска тока якоря срабатывает реле РУП и замыкает свой контакт, шунтирующий реостат возбуждения Rдоб.в (до этого реостат был закорочен размыкающим контактом КУ2). Следовательно, магнитный поток двигателя Ф сохраняется равным номинальному потоку Фном и двигатель продолжает разгон по естественной характеристике. Когдатокякоря снизится до значения тока отпускания Iотп.РУП реле РУП, последнее размыкает свой контакт, и в цепь обмотки возбуждения вводится сопротивление R доб.в . Происходит процесс ослабления магнитного потока Ф и рост скорости двигателя ω (рис. 2.4, б). При этом ток якоря увеличивается и, когда он достигнет значения тока срабатывания Iсраб.РУП реле РУП, контакт реле закроется. Начнется усиление магнитного потока и снижение тока якоря. Скорость двигателя будет продолжать расти, так как за счет увеличенного тока якоря момент двигателя превышает статический момент. При спадании тока якоря до величины Iотп.РУП вновь реле РУП откроет свой контакт, что повлечет за собой ослабление потока и т.д. Реле РУП срабатывает несколько раз, прежде чем двигатель достигнет скорости, заданной положением ползунка реостата R доб.в .
Таким образом, если пренебречь инерционностью реле РУП, можно считать, что в описанном процессе ослабления потока ток якоря двигателя колеблется в пределах от Iотп.РУП до Iсраб.РУП . Колебания тока тем меньше, чем выше коэффициент возврата реле РУП. Подобный процесс и способ управления называют вибрационным. Данный способ особенно удобен для управления разгоном двигателей с широким диапазоном регулирования скорости при Ф < Фном. Очевидно, что вибрационное управление обеспечивается и в процессе регулирования скорости двигателя в сторону ее увеличения, когда ползунок реостата R доб.в быстро перемещается в новое положение.
Для определения времени процесса разгона двигателя при вибрационном управлении можно воспользоваться приближенным методом, основанным на допущении, что ток якоря в переходном процессе остается неизменным и равным его среднему значению.
В этом случае для режима ослабления магнитного потока, когда якорь двигателя подключен к сети с номинальным напряжением Uном можно записать следующие уравнения переходного процесса:

 .
.
Разрешая систему уравнений относительно t и интегрируя полученное выражение в пределах от Фнач до Фкон, найдем время разгона.
Рассмотрим теперь наиболее характерные узлы электрических схем управления торможением двигателей постоянного тока.
На рис. 2.5, а приведен узел схемы, обеспечивающий управление динамическим торможением нереверсивного двигателя независимого возбуждения в функции времени. На этом же рис. (2.5, б и 2.5, в) показаны механические характеристики и графики изменения во времени момента (тока якоря) и скорости двигателя при торможении.
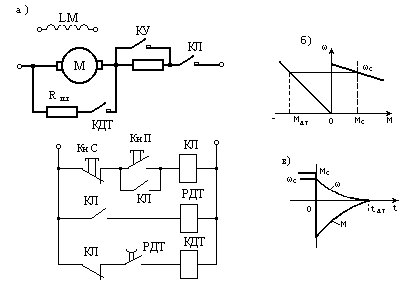
Рис. 2.5. Узел схемы автоматического управления динамическим
торможением двигателя постоянного тока
Цепи включения катушек контакторов ускорения на схеме не изображены, и эти контакторы условно представляет один главный контакт КУ, шунтирующий сопротивление Rдоб.п. Алгоритм работы узла схемы можно описать в следующей последовательности. Предположим, что двигатель работает с установившейся скоростью ωс. Контакторы КЛ и КУ включены, реле торможения (реле времени) РДТ также включено и его контакт замкнут. Но катушка контактора торможения КДТ не обтекается током, поскольку в ее цепи разомкнут размыкающий блок-контакт контактора КЛ.
После нажатия на кнопку КнС («стоп») контактор КЛ отключится и своим главным контактом отсоединит якорь двигателя от сети. Замыкающий блок-контакт КЛ разомкнет цепь катушки реле РДТ, и оно начнет отсчет времени торможения. Размыкающий блок-контакт КЛ закроется, катушка контактора КДТ получит питание. Контактор КДТ включится и своим главным контактом присоединит якорь двигателя к добавочному тормозному сопротивлению Rд.т. Происходит динамическое торможение двигателя. В конце его реле РДТ, отсчитав заданную выдержку времени, своим контактом отключит контактор КДТ.
Управление в функции времени применяется только при реактивном статическом моменте Мс. Уставка реле РДТ должна быть приблизительно равной или немного большей времени торможения tд.т. При активном Мс увеличение его при соответственном уменьшении действительного времени торможения по сравнению с уставкой реле РДТ может привести к реверсу двигателя, прежде чем он будет отключен. Необходимо отметить, что при активном Мс по окончании торможения и отключении двигателя его вал всегда должен быть заторможен при помощи механического тормоза.
Узел схемы реализующий динамическое торможение в функции ЭДС отличается от схемы приведенной на рис. 2.5 тем, что катушка реле напряжения РДТ осуществляющего контроль ЭДС включается на зажимы якоря двигателя.
Для электроприводов, работающих в напряженном повторно-кратковременном режиме, обычно применяют не кнопочное, а командо-контроллерное управление, более удобное для оператора. Кроме того, с целью уменьшения времени торможения, особенно в реверсивных приводах, используют часто торможение противовключением.
Узел схемы, обеспечивающий торможение противовключением реверсивного привода в функции ЭДС, приведен на рис. 2.6, а. Он пригоден для двигателей любого вида возбуждения. Пуск двигателя условно принят в одну ступень с управлением в функции времени. Реле напряжения РПВ и РПН управляют процессом торможения и называются реле противовключения. Добавочное сопротивление Rдоб.пр — ступень противовключения. Для иллюстрации работы схемы на рис. 2.6, б приведены соответствующие механические характеристики двигателя независимого возбуждения. Алгоритм работы узла схемы в режиме торможения сводится к следующему. Предположим, что двигатель работал в установившемся режиме в условном направлении «вперед». При этом рукоятка командоконтроллера находится в положении В, и во включенном состоянии находятся контактор KB, реле РПВ и контакторы КУ и КП. Ступень сопротивления противовключения Rдоб.пр и пусковая ступень Rдоб.п закорочены.
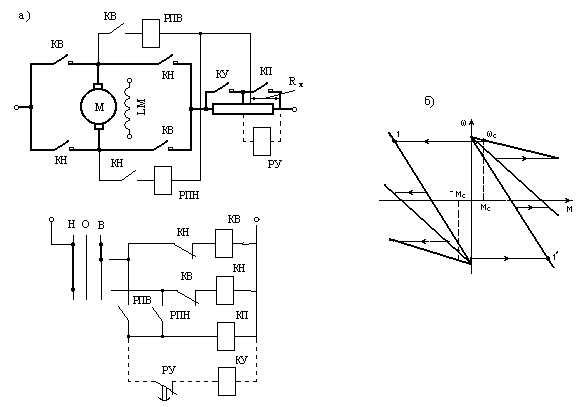
Рис. 2.6. Узел схемы управления торможением противовключением
Для реверса двигателя рукоятка командоконтроллера переводится в положение Н («назад»). При этом контактор KB отключается, размыкаются его главные контакты и замыкающий блок-контакт. Теряют питание реле РПВ и контакторы КП и КУ. В цепь якоря вводится сопротивление Rдоб.п. + Rдоб.пр . Закрывшийся размыкающий блок-контакт KB подает питание в катушку контактора КН, который включается и своими главными контактами присоединяет якорь двигателя на напряжение противоположной полярности. Двигатель переходит в режим противовключения. Замыкающий блок-контакт КН в цепи катушки реле РПН также закрывается. Однако реле РПН не срабатывает, так как в начальный момент напряжение на его катушке будет близко к нулю. Это достигается соответствующим выбором точки присоединения реле по схеме вывода катушки РПН (выбором величины сопротивления Rx). Поэтому контакт РПН остается разомкнутым, предотвращая включение контакторов КП и КУ, т.е. обеспечивая процесс торможения при полностью введенных в цепь якоря добавочных сопротивлениях.
Таким образом, начало торможения будет отвечать точке 1, расположенной на соответствующей добавочному сопротивлению Rдоб.п. + Rдоб.пр искусственной механической характеристике двигателя (рис. 2.6, б).
По мере снижения скорости двигателя возрастает напряжение на катушке реле РПН и при скорости, близкой к нулю, реле сработает. Его контакт замкнется и включит контактор КП, который закоротит своим главным контактом ступень противовключения Rдоб.пр. Двигатель перейдет на пусковую реостатную характеристику, его скорость снизится до нуля, а затем начнется разгон в функции времени в направлении «назад», т.е. двигатель реверсируется. Аналогично работает схема и при реверсе с направления «назад» на направление «вперед». Только здесь управляет процессом торможения реле РПВ. Точку присоединения реле противовключения (РПВ и РПН) выбирают из следующих соображений. Как видно из схемы на рис. 2.6, а, напряжение UРП на катушке реле меньше напряжения сети Uном на величину падения напряжения от тормозного тока в сопротивлении Rx
 .
.
Примем, что в начальный
момент торможения напряжение UРП должно быть равно
нулю. Тогда  .
Величина начального броска токаIя.т.нач не должна превышать допустимого значения I я.доп .
.
Величина начального броска токаIя.т.нач не должна превышать допустимого значения I я.доп .
Напряжение срабатывания реле U сраб.РП выбирают так, чтобы реле включалось не в самом конце торможения, а несколько раньше. Обычно принимают
 .
.
Здесь U РП (ω=0,05) = Uном (1 –Rх /R Σ),
где RΣ суммарное сопротивление якорной цепи в режиме противовключения.
Необходимо отметить, что для двигателей независимого возбуждения, работающих с ослабленным потоком, применяют динамическое торможение с одновременным усилением потока. При этом процесс управление усиления потока реализуют вибрационным способом в функции тока якоря двигателя, а управление самим динамическим торможением происходит так же, как и в схеме на рис. 2.5, а. Схемное решение узла управления усиления потока приведено на рис. 2.7.
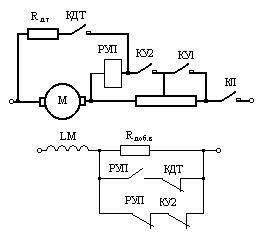
Рис. 2.7. Узел схемы управления динамическим торможением
двигателя постоянного тока в функции тока
Во время установившейся работы двигателя якорь реле РУП не притянут, и контакты реле находятся в состоянии, показанном на схеме. Блок-контакт КУ2 разомкнут, поле двигателя ослаблено. После подачи команды на торможение отключается контактор КУ2 и включается контактор КДТ. В цепях, шунтирующих реостат возбуждения Rдоб.в размыкается блок-контакт КДТ и замыкается блок-контакт КУ2. Начинается динамическое торможение, и при этом поле двигателя усиливается. Но от броска тормозного тока реле РУП срабатывает и открывает свой размыкающий контакт, что прерывает процесс усиления поля. Наоборот, оно теперь начнет ослабляться. В свою очередь это приведет к уменьшению тока якоря двигателя, в результате чего реле РУП закроет свой размыкающий контакт. Опять начнется усиление поля и т.д. до тех пор, пока ток возбуждения двигателя не станет равным номинальному. Ток якоря двигателя в вибрационном процессе усиления поля колеблется между значениями тока срабатывания Iраб.РУП и тока возврата Iотп.РУП реле РУП. Нетрудно убедиться в том, что узел схемы на рис. 2.7, а работает в режиме ослабления поля при разгоне двигателя аналогично узлу схемы на рис. 2.4, а. Вибрационный способ применяют также для управления торможением двигателя при переводе его путем усиления поля с характеристики при Ф < Фном на естественную характеристику.
Схема и принцип работы H-моста для управления двигателями
В различных электронных схемах часто возникает необходимость менять полярность напряжения, прикладываемого к нагрузке, в процессе работы. Схемотехника таких устройств реализуется с помощью ключевых элементов. Ключи могут быть выполнены на переключателях, электромагнитных реле или полупроводниковых приборах. Н-мост на транзисторах позволяет с помощью управляющих сигналов переключать полярность напряжения поступающего на исполнительное устройство.
Что такое Н-мост
 H-мост
H-мостВ различных электронных игрушках, некоторых бытовых приборах и робототехнике используются коллекторные электродвигатели постоянного тока, а также двухполярные шаговые двигатели. Часто для выполнения какого-либо алгоритма нужно с помощью электрического сигнала быстро поменять полярность питающего напряжения с тем, чтобы двигатель технического устройства стал вращаться в противоположную сторону. Так робот-пылесос, наткнувшись на стену, мгновенно включает реверс и задним ходом отъезжает от препятствия. Такой режим реализуется с помощью Н-моста. Схема Н-моста позволяет так же изменять скорость вращения электродвигателя. Для этого на один из двух ключей подаются импульсы от широтно-импульсного модулятора (ШИМ).
Схемой управления режимами двигателя является h-мост. Это несложная электронная схема, которая может быть выполнена на следующих элементах:
- Биполярные транзисторы
- Полевые транзисторы
- Интегральные микросхемы
Основным элементом схемы является электронный ключ. Принципиальная схема моста напоминает латинскую букву «Н», отсюда название устройства. В схему входят 4 ключа расположенных попарно, слева и справа, а между ними включена нагрузка.
 H-мост
H-мостНа схеме видно, что переключатели должны включаться попарно и по диагонали. Когда включен 1 и 4 ключ, электродвигатель вращается по часовой стрелке. 2 и 3 ключи обеспечивают работу двигателя в противоположном направлении. При включении двух ключей по вертикали слева или справа произойдёт короткое замыкание. Каждая пара по горизонтали закорачивает обмотки двигателя и вращения не произойдёт. На следующем рисунке проиллюстрировано, что происходит, когда мы меняем положение переключателей:
 Схема работы H-моста
Схема работы H-мостаЕсли мы заменем в схеме переключатели на транзисторы, то получим такой вот (крайне упрощенный) вариант:
 H-мост
H-мостДля того чтобы исключить возможное короткое замыкание h-мост на транзисторах дополняется входной логикой, которая исключает появление короткого замыкания. В современных электронных устройствах мостовые схемы изменения полярности дополняются устройствами, обеспечивающими плавное и медленное торможение перед включением реверсного режима.
Н-мост на биполярных транзисторах
Транзисторы в ключевых схемах работают по принципу вентилей в режиме «открыт-закрыт», поэтому большая мощность на коллекторах не рассеивается, и тип применяемых транзисторов определяется, в основном, питающим напряжением. Несложный h-мост на биполярных транзисторах можно собрать самостоятельно на кремниевых полупроводниковых приборах разной проводимости.
 H-мост на биполярных транзисторах
H-мост на биполярных транзисторахТакое устройство позволяет управлять электродвигателем постоянного тока небольшой мощности. Если использовать транзисторы КТ816 и КТ817 с индексом А, то напряжение питания не должно превышать 25 В. Аналогичные транзисторы с индексами Б или Г допускают работу с напряжением до 45 В и током не превышающим 3 А. Для корректной работы схемы транзисторы должны быть установлены на радиаторы. Диоды обеспечивают защиту мощных транзисторов от обратного тока. В качестве защитных диодов можно использовать КД105 или любые другие, рассчитанные на соответствующий ток.
Недостатком такой схемы является то, что нельзя подавать на оба входа высокий потенциал, так как открытие обоих ключей одновременно вызовет короткое замыкание источника питания. Для исключения этого в интегральных мостовых схемах предусматривается входная логика, полностью исключающая некорректную комбинацию входных сигналов.

Схему моста можно изменить, поставив в неё более мощные транзисторы.
Н-мост на полевых транзисторах
Кроме использования биполярных транзисторов в мостовых схемах управления питанием, можно использовать полевые (MOSFET) транзисторы. При выборе полупроводниковых элементов обычно учитывается напряжение, ток нагрузки и частота переключения ключей, при использовании широтно-импульсной модуляции. Когда полевой транзистор работает в ключевом режиме, у него присутствуют только два состояния – открыт и закрыт. Когда ключ открыт, то сопротивление канала ничтожно мало и соответствует резистору очень маленького номинала. При подборе полевых транзисторов для ключевых схем следует обращать внимание на этот параметр. Чем больше это значение, тем больше энергии теряется на транзисторе. При минимальном сопротивлении канала выше КПД моста и лучше его температурные характеристики.
Дополнительным негативным фактором является зависимость сопротивления канала от температуры. С увеличением температуры этот параметр заметно растёт, поэтому при использовании мощных полевых транзисторов следует предусмотреть соответствующие радиаторы или активные схемы охлаждения. Поскольку подбор полевых транзисторов для моста связан с определёнными сложностями, гораздо лучше использовать интегральные сборки. В каждой находится комплементарная пара из двух мощных MOSFET транзисторов, один из которых с P каналом, а другой с N каналом. Внутри корпуса также установлены демпферные диоды, предназначенные для защиты транзисторов.

В конструкции использованы следующие элементы:
- VT 1,2 – IRF7307
- DD 1 – CD4093
- R 1=R 2= 100 ком
Интегральные микросхемы с Н-мостом
В ключах Н-моста желательно использовать комплементарные пары транзисторов разной проводимости, но с одинаковыми характеристиками. Этому условию в полной мере отвечают интегральные микросхемы, включающие в себя один, два или более h-мостов. Такие устройства широко применяются в электронных игрушках и робототехнике. Одной из самых простых и доступных микросхем является L293D. Она содержит два h-моста, которые позволяют управлять двумя электродвигателями и допускают управление от ШИМ контроллера. Микросхема имеет следующие характеристики:
- Питание – + 5 В
- Напряжение питания электромотора – + 4,5-36 В
- Выходной номинальный ток – 500 мА
- Ток в импульсе – 1,2 А
Микросхема L298 так же имеет в своём составе два h-моста, но гораздо большей мощности. Максимальное напряжение питания, подаваемое на двигатель, может достигать + 46 В, а максимальный ток соответствует 4,0 А. Н-мост TB6612FNG допускает подключение двух коллекторных двигателей или одного шагового. Ключи выполнены на MOSFET транзисторах и имеют защиту по превышению температуры, перенапряжению и короткому замыканию. Номинальный рабочий ток равен 1,2 А, а максимальный пиковый – 3,2 А. Максимальная частота широтно-импульсной модуляции не должна превышать 100 кГц.
Мостовые устройства управления электродвигателями часто называют драйверами. Драйверами так же называют микросхемы, только обеспечивающие управление мощными ключевыми каскадами. Так в схеме управления мощным электродвигателем используется драйвер HIP4082. Он обеспечивает управление ключами, собранными на дискретных элементах. В них используются MOSFET транзисторы IRF1405 с N-каналами. Компания Texas Instruments выпускает большое количество интегральных драйверов предназначенных для управления электродвигателями разных конструкций. К ним относятся:
- Драйверы для шаговых двигателей – DRV8832, DRV8812, DRV8711
- Драйверы для коллекторных двигателей – DRV8816, DRV8848, DRV8412/32
- Драйверы для бесколлекторных двигателей – DRV10963, DRV11873, DRV8332
На рынке имеется большой выбор интегральных мостовых схем для управления любыми электродвигателями. Сделать конструкцию можно и самостоятельно, применив качественные дискретные элементы.
Устройство управления двигателем постоянного тока — Меандр — занимательная электроника
При включении и выключении двигателей постоянного тока (ДПТ), работающих в паре с пластмассовыми редукторами, возникает удар, который постепенно разрушает редуктор. Предлагаемое устройство позволяет плавно подавать и снимать нагрузку с редуктора, и может быть использовано для регулировки скорости в ДПТ, плавного пуска и остановки ДПТ, например, при закрытии/открытии жалюзи, подъема/опускания ролетов и в других т.п. устройствах.
Детский электрический автомобиль
Устройство разработано для детских электрических автомобилей с питанием от аккумуляторной батареи 6 В 10 А*ч. Автомобиль управляется по радиоканалу с пульта управления, находящимся в руках родителя, идущего рядом с автомобилем. Для того чтобы маленькие дети не пугались при движении с большой скоростью, устройство снабжено переключателем скоростей. Поскольку в устройстве применено питание двигателя импульсами ШИМ, то скорости переключаются подачей на ДПТ импульсов с заполнением 50%, 60%, 80% и 100%.
Алгоритм работы
Предлагаемое устройство разрабатывалось с условием минимального изменения в электрической схеме автомобиля.
Устройство разработано на микроконтроллере РIС16F676. Алгоритм работы программы микроконтроллера показан на рис.1. После пуска и инициализации микроконтроллера определяется установленная скорость и включается флаг выбранной скорости. Далее определяется направление движения: прямой ход, реверсивный ход, либо отсутствие движения — стоп, и устанавливаются соответствующие флаги направления.
Рис. 1
Если направление движения не выбрано, то сигнала «Пуск» нет, и программа переходит на ожидание прерывания. Если «Пуск» включен, то по флагу определяется направление движения и отрабатывается прямой ход или обратный.
Длительность управляющего импульса пуска при прямом и обратном ходе формируется одинаково, но на разные выходы. Один выход, который включает «земляной» провод двигателя, включается сразу, а на втором выходе длительность импульса включения увеличивается после каждого прерывания. Чем большее число прерываний произошло с момента начала пуска, тем на большее значение увеличивается длительность импульса.
Реализовано это с помощью подпрограммы задержки 37 мкс, умноженное на число регистра «сек», имеющего переменное значение, и изменяющееся после каждого прерывания. Прерывание по переполнению таймера ТМR0 происходит через 4 мс, делится делителем на 10 и увеличивает счетчик «сек». Таким образом, счетчик «сек» увеличивается на единицу через 40 мс. Значение этого счетчика при пуске выбрано равным 55, но может быть изменено пользователем в любую сторону. При данном значении счетчика «сек» время пуска равно 2,25 с, а длительность импульса плавно увеличивается до 75% полной мощности двигателя.
После отработки части пуска ожидается прерывание, и, если пуск еще не завершен, программа возвращается на определение скорости и направления. Если пуск выполнен, то программа отрабатывает выбранную скорость с частотой ШИМ, равной 125 Гц. Отработка скорости выполняется аналогично отработке пуска, но с постоянным временем задержки. Но если при пуске время задержки увеличивает длительность выходного импульса, то при работе время задержки определяет длительность паузы. Это необходимо для того, чтобы при отработке «стопа» еще больше увеличивать время паузы, сокращая таким образом длительность выходного импульса.
Если включен флаг «стопа», то при прерывании изменяются значения делителей. Делитель на 10 становится делителем на 1, а значение регистра «сек» может принимать значение либо 50, либо 70. Это зависит от включенного флага скорости. При скорости 50% регистр «сек» принимает значение 50, так как при больших значениях происходит перерегулировка и длительность паузы становится больше длительности импульса работы. При этом вместо того, чтобы уменьшать значение длительности импульса, она начинает возрастать. При таких значениях регистра «сек» время остановки двигателя равно 0,2 с (оно может быть изменено пользователем в любую сторону уменьшением или увеличением до 255 значения регистра «сек»), а длительность выходного импульса плавно уменьшается до нуля.
После отработки длительности импульса скорости или стопа программа повторяется с определения скорости.
Работа устройства
Принципиальная электрическая схема устройства показана на рис.2. Выходы микроконтроллера DD1 RC0-RC3 управляют ключами VT1-VT4, которые открывают полевые транзисторы VT5-VT8, подающие напряжение в необходимой полярности на двигатель постоянного тока М1. На входы RA4, RA5 ИМС DD1 через переключатели SA1, SA2 подается лог. «0», определяя выбранную скорость. Программно входы RA4, RA5 подтянуты внутренними резисторами микроконтроллера к плюсу питания. Значения выбранных скоростей в зависимости от состояния входов приведены слева внизу на рис.2.
Рис. 2
На входы RC4, RC5 также подается напряжение от БУ автомобиля, определяя выбранное направление движения. Поскольку при полностью заряженной аккумуляторной батарее (АКБ) автомобиля напряжение на ней превышает максимально допустимое для входов микроконтроллера, то установлены делители напряжения R2, R9 и R3, R8.
Вначале был изготовлен вариант устройства с питанием от АКБ автомобиля, но при уменьшении напряжения на АКБ вследствие ее разряда полевые транзисторы открывались не полностью, и их внутреннее сопротивление увеличивалось. Увеличивалось и падение напряжения на транзисторах, и они грелись. Поэтому для питания микроконтроллера и ключевых транзисторов была установлена дополнительная батарея GB1 с напряжением 9 В. Стабилизатор напряжения DA1 необходим только для питания ИМС микроконтроллера DD1. Потребляемый ток от батареи GB1 составляет 15…25 мА. Меньшее потребление тока будет при максимальной скорости вращения двигателя.
Конструкция и детали
Схема подключения устройства в сеть автомобиля показана на рис.3. Пунктиром показано штатное соединение. Под сиденьем автомобиля имеется ниша для второго АКБ и много свободно го места. Сняв сиденье и крышку ниши АКБ, увидите пару проводов, идущих от АКБ, и пару проводов, идущих к двигателю. Один провод, как правило, черный — «минусовой», а второй провод — красный (может быть и желтым, белым) — «плюсовой». В назначении проводов можно убедиться, посмотрев на клеммы АКБ. Провод, идущий от БУ к двигателю, необходимо отпаять от двигателя и припаять к плате. Поскольку провод толстый, то лучше предварительно припаять к нему тонкие провода, которые легко паять к плате. Провода питания, идущие от АКБ к плате и от платы на двигатель, необходимо брать сечением не менее 1 мм2. Выключатель напряжения SA3 лучше установить на крышке ниши АКБ под сиденьем или сзади корпуса автомобиля. Разводку 9 В питания можно выполнить любым монтажным проводом. Батарею GB1 и плату можно закрепить в любом удобном месте.
Рис. 3
Печатная плата устройства и схема расположения элементов показаны на рис.4 и рис.5 соответственно.
Рис. 4
Рис. 5
МОSFЕТ-транзисторы \/Т5-\/Т8 могут быть любыми импортными с буквенным индексом L, с током стока не менее 10 А или отечественные с аналогичными параметрами. Чем больше допустимый
ток стока, тем меньших размеров нужен радиатор для транзистора. При 10-кратном запасе по току, радиатор может вообще не понадобиться. Конечно, это при условии, что транзистор открывается полностью. Большую нагрузку испытывают транзисторы, работающие в ключевом режиме, т.е. VT7, VТ8.
Транзисторы VT1-VT4 могут быть любыми структуры n-р-n. Переключатели скоростей SА1, SА2 лучше заменить одним движковым и установить его на передней панели автомобиля. В качестве батареи GB1 лучше применить 2 батареи типа 3R12, которых хватит на весь сезон.
Работа с устройством
Перед подачей напряжения на БУ автомобиля, необходимо подать напряжение на плату устройства. Напряжение питания 6 В и 9 В на плату должно подаваться одновременно. При движении вперед и переключении назад сначала отрабатывается время стопа, затем время пуска в выбранном направлении. При выключении движения отрабатывается время стопа, а при включении — время пуска.
Скачать файлы abtou.asm и abtou.hex, а также печатная плата в формате .lay
Автор: Николай Заец, г. Азов, Ростовской обл.
Источник: Радиоаматор №5, 2015