
Вращающиеся трансформаторы

Вращающиеся (поворотные) трансформаторы предназначены для получения переменного напряжения, значение которого зависит от угла поворота ротора. По назначению вращающиеся трансформаторы относятся к информационным электрическим машинам и применяются в системах автоматического регулирования в качестве элементов (датчиков угла) для измерения рассогласования между двумя вращающимися осями. Вращающийся трансформатор конструктивно представляет собой электрическую машину индукционного типа малой мощности. Наибольшее применение получили двухполюсные вращающиеся трансформаторы с двумя парами одинаковых взаимно перпендикулярных обмоток: обмотки и wK (CI—С2 и СЗ—С4) расположены на статоре; обмотки ги2и щ (Р1 — Р2 и РЗ — Р4) — на роторе (рис. 1).
Обмотка возбуждения (CI—С2) включается в сеть переменного тока, компенсационная обмотка СЗ —С4 замыкается накоротко или на резистор. Обмотки на роторе называют вторичными: синусная PI — Р2 и косинусная РЗ — Р4. Электрический контакт с обмотками ротора осуществляется либо с помощью контактных колец и щеток (аналогично контактным сельсинам), либо посредством спиральных пружин. В последнем случае угол поворота ротора вращающегося трансформатора ограничивается максимальным углом закручивания спиральных пружин.

Рис. 1. Принципиальная схема вращающегося трансформатора
Если вращающийся трансформатор используется в качестве измерительного элемента, то поворот ротора осуществляется посредством редукторного механизма высокой точности, который либо встраивается в корпус вращающегося трансформатора, либо монтируется отдельно от вращающегося трансформатора и механически соединяется с его валом. Если вращающийся трансформатор предназначен для работы в режиме поворота ротора в пределах определенного угла, то в качестве обмоток возбуждения и компенсационной используются обмотки статора, а в качестве вторичных — обмотки ротора.
В зависимости от графика функциональной зависимости ЭДС вторичной обмотки от угла поворота ротора вращающиеся трансформаторы разделяют на следующие типы:
синусно-косинусный вращающийся трансформатор (СКВТ) — напряжение U2 на выходе обмотки w2 находится в синусной зависимости от угла поворота ротора а, а напряжение U3 на выходе обмотки — в косинусной зависимости от угла поворота ротора а;
вращающийся трансформатор-построитель (ПВТ) предназначен для решения геометрических задач.
Кроме того, вращающиеся трансформаторы могут применяться в качестве масштабных трансформаторов (МВТ) для согласования напряжений отдельных каскадов автоматического устройства, фазовращателей, электрических машин синхронной связи в трансформаторных системах дистанционной передачи угла.

Рис. 2. Схемы и диаграммы синусно-косинусного вращающегося трансформатора в синусном (о, б) и синусно-косинусном (в, г, д) режимах


Рис. 3. Трансформаторная система дистанционной передачи угла на вращающихся трансформаторах
Линейные вращающиеся трансформаторы делятся на три класса точности и характеризуются допустимыми показателями, приведенными ниже.
Класс точности ЛBT | Ел, % | еосг, % |
0,05 | +0,05 | 0,025 |
0,1 | ±0,1 | 0,05 |
0,2 | ±0,2 | 0,1 |
Вращающиеся трансформаторы, аналогично сельсинам, можно использовать в трансформаторной системе дистанционной передачи угла. На рис. 3 показана принципиальная схема такой передачи. В качестве датчика Д и приемника Π применены вращающиеся трансформаторы СКВТ. При подаче напряжения £/, на обмотку возбуждения wia в ВТ-датчике возникает пульсирующий магнитный поток Ф,. Положение обмоток ротора ВТ- датчика зависит от угла ад — поворота ротора относительно оси обмотки w 1Д. Магнитный поток Фь сцепляясь с обмотками ротора w2 и ВТ-датчика, индуцирует в них ЭДС Е2 и Е» /> , под действием которых в цепи синхронизации системы возникают токи. Проходя по обмоткам ротора ιυ2 и ВТ- приемника, эти токи создают пульсирующий магнитный поток Фп. Пространственное положение вектора этого потока определяется углом поворота ротора ВТ-датчика, т.е. при повороте ротора ВТ датчика на угол ад вектор потока Фп поворачивается на такой же угол. Сцепляясь с обмоткой статора wK П, поток Фп индуцирует в ней ЭДС Евых, величина которой зависит от угла рассогласования системы θ = ад — ап. В остальном работа вращающихся трансформаторов в рассматриваемой системе аналогична работе сельсинов.
Типоразмер | Напряжение возбуждения, В | Частота тока возбуждения, Гц | Коэффициент трансформации | Частота вращения, об/мин |
4МВТ-1 | 30 | 400 | 0,6 | — |
5МВТ-2-10Э-01 | 30 | 400 | 1,0 | 60 |
10МВТ-2В-5П | 28 | 400 | 0,56 | 60 |
10МВТ-2В-10П | 28 | 400 | 60 | |
5МВТ-2-5Э-0Д | 30 | 400 | 0,56 | 60 |
ВТ-60 | 12 | 2000 | 0,16 | 5000 |
ВТМ-4А | 60 | 400 | 1,0 | 2000 |
ВТМ-5А | 5,4 | 400 | 1,0 | 3000 |
ВТМ-6М | 60 | 2000 | 1,0 | 3000 |
В отличие от трансформаторной системы на сельсинах система на вращающемся трансформаторе обеспечивает более высокую точность, что объясняется большей точностью вращающихся трансформаторов по сравнению с сельсинами. Однако мощность на выходе ВТ-приемника меньше мощности на выходе сельсина-приемника, поэтому для трансформаторных систем на вращающемся трансформаторе требуются усилители мощности с более высоким коэффициентом усиления.
Промышленность изготовляет вращающиеся трансформаторы, предназначенные для включения в сеть переменного тока обычно частотой 400 и 2000 Гц.
В табл. 1приведены технические данные вращающихся трансформаторов некоторых типоразмеров, а на рис. 4 показаны габаритные и установочно-присоединительные размеры вращающихся трансформаторов серии МВТ.

Рис. 4. Габаритные и установочно-присоединительные размеры вращающегося трансформатора серии МВТ
Поворотный трансформатор — Знаешь как
Содержание статьи
 Поворотные (вращающиеся) трансформаторы применяются для получения напряжения, пропорционального углу поворота α или sin α и cos α. В вычислительных устройствах поворотные трансформаторы используются для решения тригонометрических задач, например для определения гипотенузы прямоугольного треугольника по его катетам тора 1 и ротора 2, на
Поворотные (вращающиеся) трансформаторы применяются для получения напряжения, пропорционального углу поворота α или sin α и cos α. В вычислительных устройствах поворотные трансформаторы используются для решения тригонометрических задач, например для определения гипотенузы прямоугольного треугольника по его катетам тора 1 и ротора 2, на
Рис. 12-19. Поворотный трансформатор.
Поворотный трансформатор (рис. 12-19) состоит из статора 1 и ротора 2, набранных, из листовой электротехнической стали. В пазах статорами ротора помещены, обмотки 3 и 4, каждая из которых состоит из двух обмоток, смещенных одна относительно другой на 90°. Выводы обмоток — статора с1с2с3с4 и ротора р1р2р3р4 помещены на одной из торцовых крышек трансформатора. В тех случаях, когда угол поворота ротора ограничен ± 360°, концы обмоток ротора выводятся не при помощи контактных колец и щеток, а гибкими проводами в виде лент 5, намотанных на изолирующем барабане, закрепленном на валу ротора 6.

Рис. 12-20. Схема включения обмоток поворотного трансформатора.
Схема включения и расположения обмоток трансформа тора показана на рис. 12-20, а. Если подать переменное напряжение, например, к обмотке с1с2, то в роторной обмотке р1р2, как во вторичной обмотке обычного трансформатора, будет наводиться э. д. с. Ер12 = ЕМ, поскольку оси обмоток с1с2 и р1р2 совпадают. Электродвижущие силы двух других обмоток Ес32 и Ер34 равны нулю, так как оси этих обмоток перпендикулярны оси обмотки с1с2.

Рис. 12-21. Зависимость э. д. с. поворотного трансформатора от угла поворота ротора.
Если повернуть ротор на угол α (рис. 12-20, б), то Ер12 = Ем cos α, a Ер34 = Ем sin α. Поэтому обмотка р1р2 называется косинусной, а обмотка р3р4 — синусной. Кривая зависимости Ер34 = f (α), т. е. синусоида, показана на рис. 12-21 верхней ветвью 1.Однако такая зависимость получится, если обмотка р3р4 не нагружена. Если замкнуть обмотку р3р4 на сопротивление z2 (рис. 12-20, б), то благодаря току Iр34 возникает н. с. Ер34 направление которой совпадает с осью обмотки р3р4, что показано на рис. 12-22.
Эта н. с. состоит из продольной н. с. Fпp, которая полностью компенсируется увеличением тока в первичной обмотке, как в обычном трансформаторе, и поперечной н. с. Fп.п. Последняя суммируется с н. с. Fс12 искажает магнитный поток трансформатора и, следовательно, кривую Ер34 = f (α), как показано на рис. 12-21 (кривая 2). Компенсировать поперечную н. с. можно разными способами. Один из них следующий.

Рис. 12-22. Диаграмма компенсации поперечной н. с. поворотного трансформатора.
В обмотку р1р2 включают сопротивление z1 с таким расчетом, чтобы z1 + z12 = z2 + z31 , где z12 и z34 соответственно сопротивления обмоток р1р2 и р3р4. Такое включение показано на рис. 12-20, в. Тогда для любого угла α н. c. Fр34 = FM sin α, а н. с. Fп.п = Fмsin α cos α. С другой стороны н. с. Fр12 = FM cos α, а ее поперечная н. с. Fп.п = FM cos α sin α. Таким образом, обе поперечные н. с. равны и компенсируют друг друга, а кривая 2, показанная на рис. 12-21, становится практически синусоидальной. Допустимая разность ординат при любом угле α не должна превышать 0,05% ординаты синусоиды.
АСИНХРОННЫЕ МАШИНЫ ДЛЯ СИНХРОННОЙ СВЯЗИ
В следящем электроприводе применяются малогабаритные индукционные электрические машины, называемые сельсинами. По существу это вращающиеся трансформаторы, имеющие на роторе обмотку с кольцами и щетки, и обладающие свойством самосинхронизации, чем и объясняется их название.

На рис. 12-23 показаны два сельсина в одном из возможных исполнений. Каждый сельсин устроен следующим образом. На статорах 1, имеющих всегда только два выступающих полюса, помещены однофазные обмотки возбуждения 2, подключенные к общей сети переменного тока. В пазах роторов помещены трехфазные обмотки синхронизации, соединенные в звезду, начала которых выведены на контактные кольца 3. Через щетки сельсины соединены друг с другом линией связи 4. Сельсины всегда работают в паре (датчик — приемник). Пусть на рис. 12-23 сельсин № 1 служит датчиком сигналов, а сельсин № 2 — приемником их. Схема показывает сельсины, работающие в индикаторном режиме, когда производится дистанционная передача угловых перемещений двух или нескольких валов машин или аппаратов, механически не связанных друг с другом.
Рис. 12-23. Схема сельсинов при отсутствии угла рассогласования.
В представленном на рис. 12-23 положении роторов переменные потоки, созданные обмотками возбуждения, наводят в фазах роторов э. д. с. ЕА1 = ЕА2, Ес1 = Ес2 , в то время как Eв1 и Ев2 равны нулю. В линии связи 4 ток будет равен нулю, так как в замкнутом контуре фаз А1 и А 2, С1 и С2 действуют встречно две равные и совпадающие по фазе э. д. с. Это положение соответствует моменту включения на параллельную работу двух синхронных машин (рис. 12-24, а).

Если механизм, связанный с ротором сельсина № 1, повернуть или он повернулся под воздействием какой-либо причины, например на 30°, то направление э. д. с. в фазах ротора сельсина № 1 будет показанным на рис. 12-25. Электродвижущие силы Е1 и Е2 во всех фазах изменяются пропорционально синусу угла рассогласования 9, что на рис. 12-24, б можно показать смещением Е1, на угол ϴ. В замкнутом контуре обмоток ротора, в каждой фазе, действует разность э. д. с. АЕ и протекает ток.
Рис. 12-24. Диаграмма э. д. с. сельсинов при отсутствии и наличии угла рассогласования.
Так как активное сопротивление фазы ротора мало по сравнению с реактивным, то можно считать, что z≈ х, и ток отстает от ∆Е на угол 90°. Однако, как и в синхронной машине, этот ток почти совпадает с э. д. с. El,вызывая тормозной момент на оси ротора сельсина № 1 и вращающий момент на оси сельсина № 2. Направление токов показано на рис. 12-25 и ротор сельсина № 2 стремится повернуться на 30°. Однако угол поворота сельсина-приемника всегда будет меньше, чем требуется, на некоторый угол составляющий 0,25°—0,75°.

По конструкции сельсины делятся на датчики и приемники; они могут быть контактными, подобно представленным выше, и бесконтактными; обмотки выполняются как сосредоточенными, так и распределенными, обмотка возбуждения может быть на роторе или на статоре. Пара сельсинов может работать и в трансформаторном режиме, когда она применяется для измерения углов рассогласования командной и исполнительной осей, по величине выходного напряжения сельсина приемника, пропорционального углу перемещения ротора сельсина датчика. Выходная мощность сельсинов не более 20 вт, частота 50 и 400, 500 гц.
Рис. 12-25. Схема взаимодействия токов в сельсинах при наличии угла рассогласования.
ЭЛЕКТРИЧЕСКИЙ ВАЛ МАШИН
Принцип работы машин в синхронной связи, изложенный выше, применяется в устройствах так называемого электрического вала (рис. 12-26). В данном случае С1и С2 — асинхронные машины нормального исполнения, предназначенные для передачи энергии из одной части схемы в другую.

Рис. 12-26. Схема электрического вала.
Два вала 1 и 2, механически не связанные друг с другом и приводимые своими отдельными двигателями Д1 и Д2, должны работать синхронно. Расстояние между валами таково, что механическая связь их затруднена или невозможна (бумагоделательные машины, портальные краны, замена ходовых винтов в тяжелых токарных станках, карусельные станки и др.).

При возникновении угла рассогласования между валами 1 и 2 вспомогательные машины С1 и С2 создают дополнительные вращающие моменты, поддерживающие синхронную работу главных двигателей Д1 и Д2. Зависимость вращающего момента от скольжения М = f (s) показана на рис. 12-27. При малых скольжениях, когда роторы машин С1 и С2 вращаются в направлении магнитного потока, развиваемые моменты малы.
Рис. 12-27. Диаграмма зависимости момента от скольжения для электрического вала.
Для передачи больших моментов при широком изменении скоростей вращения машины С1 и С2 работают против потока, когда скольжение, а значит, и момент велики.
Статья на тему Поворотный трансформатор
Схемы включения вращающихся трансформаторов
Схемы включения сельсинов
При использовании однофазных сельсинов в качестве датчиков положения можно выделить два основных варианта их работы – режим фазовращателя и трансформаторный режим. В режиме фазовращателя трехфазная обмотка сельсина питается трехфазной системой синусоидальных напряжений с частотой w. При этом создается вращающееся с частотой w магнитное поле, которое наводит в однофазной обмотке ЭДС евых, фаза которой зависит от углового положения ротора a,
 (1.2)
(1.2)
где y — константа.
Таким образом, информацией об угловом положении является сдвиг фазы j между питающим и выходным напряжениям.
Достоинством режима фазовращателя является линейность сдвига фазы j от угла a и удобство преобразования данного сдвига в цифровой код положения.
В трансформаторном режиме однофазная обмотка питается переменным напряжением
. (1.3)
При этом создается пульсирующий магнитный поток возбуждения, направленный по оси однофазной обмотки. Этот поток наводит в фазах трехфазной обмотки ЭДС е1, е2, е3, величина которых зависит от угла a,
 , (1.4)
, (1.4)
где n=1, 2, 3; k1 – коэффициент трансформации; a — угловое положение между осью однофазной обмотки и осью первой фазы трехфазной обмотки.
В трансформаторном режиме информацией об угловом положении является величина напряжений трехфазной обмотки.
На основе сельсинов также строятся системы дистанционной передачи угла (СДПУ) или, иначе говоря, системы синхронной связи (ССС). В СДПУ обеспечивается синхронный поворот механически не связанных осей.
Можно выделить две основных разновидности СДПУ на основе сельсинов – индикаторную и трансформаторную системы синхронной связи. Схема индикаторной ССС приведена на рис.1.2.
Трехфазные обмотки сельсина – датчика СД и сельсина – приемника СП соединены друг с другом. Однофазные обмотки сельсинов питаются напряжением , описываемым (1.3).
, описываемым (1.3).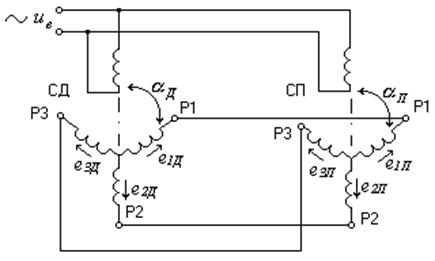
Рис.1.2. Схема индикаторной ССС
Исходя из (1.4), в трехфазных обмотках СД и СП наводятся ЭДС, величина которых зависит от угловых положений  и
и  . Угол рассогласования индикаторной ССС
. Угол рассогласования индикаторной ССС
. (1.5)
Если a=0, фазные ЭДС трехфазных обмоток СД и СП равны и токи в данных обмотках не протекают. Если a¹0, фазные ЭДС не равны, в трехфазных обмотках протекают токи, взаимодействие которых с потоками возбуждения СД и СП создает синхронизирующие моменты , стремящиеся устранить рассогласование a. В идеале
(1.6)
где — константа.
Индикаторная ССС характеризуется удельным синхронизирующим моментом
 (1.7)
(1.7)
Индикаторная ССС используется в случаях, когда для поворота СП не требуется значительных усилий. При повороте ротора СД на тот же угол поворачивается ротор СП.
Примером использования индикаторной ССС являются манипуляторы, осуществляющие перегрузку ядерного топлива на АЭС. С координатами манипулятора связаны сельсины-датчики, а на пульте оператора размещены сельсины-приемники с лимбами на валах. По положению роторов СП оператор судит о положении координат манипулятора.
Основным показателем точности индикаторной ССС является погрешность следования – отклонение угла поворота ротора СП от угла поворота ротора СД. В зависимости от класса точности сельсинов диапазон данной погрешности от 30′ до 1,5°.
Схема фрагмента трансформаторной ССС приведена на рис.1.3.
Рис.1.3. Фрагмент трансформаторной ССС
Однофазная обмотка сельсина-датчика СД питается переменным напряжением Uв . В трехфазной обмотке СД в соответствии с (1.4) наводятся ЭДС е1, е2, е3,, под действием которых в трехфазной обмотке СП протекают токи. Эти токи создают магнитный поток, наводящий в однофазной обмотке СП ЭДС еу, величина которой зависит от угла рассогласования .
.Для еу можно записать
(1.8)
Трансформаторная ССС используется в случаях, когда для поворота механизма, с которым связан СП, требуются значительные усилия. В таких системах выходное напряжение однофазной обмотки СП uу используется в качестве сигнала задания скорости электропривода объекта управления. При наличии uу электродвигатель перемещает объект управления в сторону уменьшения рассогласования α.
Погрешность следования трансформаторной ССС от 0,1′ до 30′.
Одним из параметров трансформаторной ССС является крутизна
 (1.9)
(1.9)
где Uу – действующее напряжение однофазной обмотки при заданном сопротивлении нагрузки.
Величины SТ составляет от 0,5 до 2 В/град.
Цель работы
Целью работы является изучение конструкций и принципа действия сельсинов, исследование характеристик сельсинов и систем синхронной связи на их основе.
Исследование сельсина
В трансформаторном режиме
Подключить однофазную обмотку одного из сельсинов к источнику однофазного напряжения. Первый канал осциллографа подключить к однофазной обмотке, второй канал – к любым двум выводам трехфазной обмотки. Снять зависимость амплитуды линейного напряжения трехфазной обмотки Umл от угла a.
Угол a изменять от 0° до 360° через каждые 30°.
Построить график зависимости Umл от a.
Синхронной связи
Собрать схему в соответствии с рис.1.2. После проверки схемы преподавателем включить напряжение питания и убедиться в работоспособности системы, поворачивая за шкив ротор одного из сельсинов.
Затормозить ротор одного из сельсинов. На шкиве другого сельсина закрепить нить для подвешивания груза. Снять зависимость синхронизирующего момента системы Мс от угла рассогласования a, подвешивая к нити грузы разного веса Рг. результаты измерения занести в таблицу.
| a, град | |||||
| Рг, г | |||||
| Мс, Нм |
Рассчитать Мс, учитывая, что радиус шкива 2 см. Построить график Мс = f(a). Определить по графику удельный синхронизирующий момент.
Системы синхронной связи
Собрать схему в соответствии с рис.1.3, используя в качестве СД сельсин с тормозом. Первый канал осциллографа подключить к однофазной обмотке СД, а второй – к однофазной обмотке СП. Затормозить ротор СД.
Снять зависимость амплитуды напряжения однофазной обмотки Umу от угла рассогласования a. Угол a изменять от 0° до 360° через каждые 30°.
Зарисовать исследуемую схему. Построить график Umу = f(a). По данному графику определить крутизну SТ.
Оформить отчет по работе
И подготовиться к защите
Отчет должен содержать название и цель работы, схемы опытов, таблицы опытных данных, графики полученных характеристик, выводы о соответствии экспериментальных данных и теоретических сведений.
2.5. Контрольные вопросы
2.5.1. Конструкции контактных и бесконтактных сельсинов.
2.5.2. Схемы включения и характеристики сельсинов при их использовании в качестве датчиков положения.
2.5.3. Принцип действия индикаторной системы синхронной связи.
2.5.4. Схема и принцип действия трансформаторной системы синхронной связи.
2.5.5. Погрешности сельсинов.3. ЛАБОРАТОРНАЯ РАБОТА
«ИССЛЕДОВАНИЕ ВРАЩАЮЩИХСЯ ТРАНСФОРМАТОРОВ»
Цель работы
Целью работы является изучение конструкций и схем включения вращающихся трансформаторов (ВТ), исследование их характеристик.
Требования к отчету
Отчет должен содержать название и цель работы, схемы включения ВТ, таблицы экспериментальных данных, графики полученных зависимостей, выводы о соответствии теоретических и экспериментальных данных.
3.6. Контрольные вопросы
3.6.1. Конструкции вращающихся трансформаторов.
3.6.2. Схемы включения ВТ и их характеристики.
3.6.3. Назначение и способы симметрирования ВТ.
3.6.4.Погрешности вращающихся трансформаторов.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторным работам
«Информационные микромашины»
по курсу «Автоматизированный электропривод» для студентов специальности 151002
«Металлорежущие станки и комплексы»
и курсу «Приводы роботов»
для студентов специальности 220402
«Роботы и робототехнические системы»
очной и очно-заочной форм обучения
Составители:
Муконин Александр Константинович
Трубецкой Виктор Александрович
Ревнёв Станислав Сергеевич
В авторской редакции
Подписано в печать 24.11.2005.
Формат 60×84/16. Бумага для множительных аппаратов.
Усл. печ. л. 1,3. Уч.-изд. л. 1,1. Тираж 120 экз. «С» 357.
Зак. № 604.
Воронежский государственный технический университет
394026 Воронеж, Московский просп., 14
Схемы включения сельсинов
При использовании однофазных сельсинов в качестве датчиков положения можно выделить два основных варианта их работы – режим фазовращателя и трансформаторный режим. В режиме фазовращателя трехфазная обмотка сельсина питается трехфазной системой синусоидальных напряжений с частотой w. При этом создается вращающееся с частотой w магнитное поле, которое наводит в однофазной обмотке ЭДС евых, фаза которой зависит от углового положения ротора a,
(1.2)
где y — константа.
Таким образом, информацией об угловом положении является сдвиг фазы j между питающим и выходным напряжениям.
Достоинством режима фазовращателя является линейность сдвига фазы j от угла a и удобство преобразования данного сдвига в цифровой код положения.
В трансформаторном режиме однофазная обмотка питается переменным напряжением
. (1.3)
При этом создается пульсирующий магнитный поток возбуждения, направленный по оси однофазной обмотки. Этот поток наводит в фазах трехфазной обмотки ЭДС е1, е2, е3, величина которых зависит от угла a,
, (1.4)
где n=1, 2, 3; k1 – коэффициент трансформации; a — угловое положение между осью однофазной обмотки и осью первой фазы трехфазной обмотки.
В трансформаторном режиме информацией об угловом положении является величина напряжений трехфазной обмотки.
На основе сельсинов также строятся системы дистанционной передачи угла (СДПУ) или, иначе говоря, системы синхронной связи (ССС). В СДПУ обеспечивается синхронный поворот механически не связанных осей.
Можно выделить две основных разновидности СДПУ на основе сельсинов – индикаторную и трансформаторную системы синхронной связи. Схема индикаторной ССС приведена на рис.1.2.
Трехфазные обмотки сельсина – датчика СД и сельсина – приемника СП соединены друг с другом. Однофазные обмотки сельсинов питаются напряжением, описываемым (1.3).
Рис.1.2. Схема индикаторной ССС
Исходя из (1.4), в трехфазных обмотках СД и СП наводятся ЭДС, величина которых зависит от угловых положений и . Угол рассогласования индикаторной ССС
. (1.5)
Если a=0, фазные ЭДС трехфазных обмоток СД и СП равны и токи в данных обмотках не протекают. Если a¹0, фазные ЭДС не равны, в трехфазных обмотках протекают токи, взаимодействие которых с потоками возбуждения СД и СП создает синхронизирующие моменты , стремящиеся устранить рассогласование a. В идеале
(1.6)
где — константа.
Индикаторная ССС характеризуется удельным синхронизирующим моментом
(1.7)
Индикаторная ССС используется в случаях, когда для поворота СП не требуется значительных усилий. При повороте ротора СД на тот же угол поворачивается ротор СП.
Примером использования индикаторной ССС являются манипуляторы, осуществляющие перегрузку ядерного топлива на АЭС. С координатами манипулятора связаны сельсины-датчики, а на пульте оператора размещены сельсины-приемники с лимбами на валах. По положению роторов СП оператор судит о положении координат манипулятора.
Основным показателем точности индикаторной ССС является погрешность следования – отклонение угла поворота ротора СП от угла поворота ротора СД. В зависимости от класса точности сельсинов диапазон данной погрешности от 30′ до 1,5°.
Схема фрагмента трансформаторной ССС приведена на рис.1.3.
Рис.1.3. Фрагмент трансформаторной ССС
Однофазная обмотка сельсина-датчика СД питается переменным напряжением Uв . В трехфазной обмотке СД в соответствии с (1.4) наводятся ЭДС е1, е2, е3,, под действием которых в трехфазной обмотке СП протекают токи. Эти токи создают магнитный поток, наводящий в однофазной обмотке СП ЭДС еу, величина которой зависит от угла рассогласования .Для еу можно записать
(1.8)
Трансформаторная ССС используется в случаях, когда для поворота механизма, с которым связан СП, требуются значительные усилия. В таких системах выходное напряжение однофазной обмотки СП uу используется в качестве сигнала задания скорости электропривода объекта управления. При наличии uу электродвигатель перемещает объект управления в сторону уменьшения рассогласования α.
Погрешность следования трансформаторной ССС от 0,1′ до 30′.
Одним из параметров трансформаторной ССС является крутизна
(1.9)
где Uу – действующее напряжение однофазной обмотки при заданном сопротивлении нагрузки.
Величины SТ составляет от 0,5 до 2 В/град.
Схемы включения вращающихся трансформаторов
Примеры условных графических обозначений обмоток ВТ приведены на рис.1.4.
 Рис.1.4. Обозначения обмоток ВТ
Рис.1.4. Обозначения обмоток ВТНа рис.1.4,а приведено полное изображение обмоток контактного ВТ, имеющего двухфазные обмотки статора и ротора. С целью уменьшения количества контактных колец два вывода роторной обмотки объединяются. При упрощенном обозначении данного ВТ ротор представляется в виде окружности с соответствующими выводами – рис.1.4,б.
Бесконтактные ВТ часто имеют одну роторную обмотку машинной части, которая соединяется с роторной обмоткой переходного кольцевого трансформатора – рис.1.4,в. Некоторые бесконтактные ВТ с ПКТ имеют две роторные обмотки машинной части, одна из которых с целью так называемого первичного симметрирования замыкается накоротко – рис.1.4,г.
В зависимости от схемы включения обмоток ВТ и получаемой при этом функции параметров выходных напряжений от угла поворота ротора, в частности, различают: синусный ВТ, синусно-косинусный ВТ, линейный ВТ, фазовращатель. Схема синусного ВТ без симметрирования приведена на рис.1.5,а.
Рис.1.5. Схема синусного ВТ без симметрирования (а) и
векторные диаграммы магнитных потоков (б)
, изменяющимся в соответствии с (1.3). Ток Iв данной обмотки создает пульсирующий поток возбуждения Фd, направленный по оси данной обмотки (продольной оси d). Если пренебречь падением напряжения на внутреннем сопротивлении обмоток ОВ, напряжение уравновешивается ЭДС , наводимой потоком Фd, (1.10)
(1.10)
где wэф – эффективное число витков обмотки статора.
Исходя из (1.3), (1.10), максимальное значение пульсирующего магнитного потока по оси d
(1.11)
Таким образом, величина потока Фd определяется приложенным напряжением.
Поток Фd наводит в синусной обмотке ротора SО ЭДС еS, величина которой является синусоидальной функцией угла поворота α. При холостом ходе, когда сопротивление нагрузки zHS = ∞, напряжение нагрузки . Для ВТ с одной парой полюсов
 , (1.12)
, (1.12)
где  — коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора).
— коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора).
При наличии нагрузки zHS протекает ток iS, который создает поток ФS, направленный по оси обмотки SО. Потоки, создаваемые токами iВ, iS , можно изобразить в виде векторов  и
и  , направленных по осям соответствующих обмоток, — рис.1.5,б.
, направленных по осям соответствующих обмоток, — рис.1.5,б.
можно представить в виде суммы продольной и поперечной  составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего.
составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего.Для уменьшения погрешностей применяют симметрирование ВТ – первичное и вторичное. При вторичном симметрировании (рис.1.6) обе обмотки ротора – синусная SО и косинусная СО нагружаются на одинаковые сопротивления
 . (1.13)
. (1.13)
Рис. 1.6. Схема ВТ со вторичным симметрированием (а) и векторные диаграммы магнитных потоков (б)
Токи iS и iС создают потоки и , поперечные составляющие которых и  взаимно компенсируются, — рис.1.6,б.
взаимно компенсируются, — рис.1.6,б.
Вращающийся трансформатор со вторичным симметрированием фактически является синусно-косинусным.
Недостатком вторичного симметрирования является необходимость соблюдения условия (1.13).
При первичном симметрировании (рис.1.7,а) вторую обмотку статора, называемую в таком случае квадратурной обмоткой КО, обычно замыкают накоротко. Поперечная составляющая наводит в КО ЭДС, под действием которой протекает ток iк, создающий поток  . Данный поток компенсирует (рис.1.7,б), что уменьшает погрешность.
. Данный поток компенсирует (рис.1.7,б), что уменьшает погрешность.Рис. 1.7. Синусный ВТ с первичным симметрированием
Недостатком первичного симметрирования является зависимость входного сопротивления ВТ от угла α. Это приводит к некоторой погрешности из-за изменения падения напряжения в контуре обмотки возбуждения.
| В ряде случаев одновременно используется первичное и вторичное симметрирование. Схема линейного ВТ с первичным симметрированием приведена на рис.1.8. Для напряжения Uвых на нагрузке zН можно записать
(1.14) где kТ – коэффициент трансформации; Uвых, UВ – действующие значения выходного и питающего напряжений. При kТ = 0,52÷0,56 отклонение зависимости Uвых = f(α) от линейной не более 1 % в |
диапазоне изменения α от -55˚ до +55˚.
Схема фазовращателя с двухфазным питанием приведена на рис.1.9,а.
Рис.1.9. Схемы ВТ в режиме фазовращателя
К одной из обмоток ротора подключается нагрузка zН. Обмотки статора питаются напряжениями
(1.15)
Создаваемое при этом вращающееся магнитное поле наводит в выходной обмотке ЭДС, фаза которой зависит от угла поворота ротора α. Для напряжения нагрузки Uвых можно записать
 (1.16)
(1.16)
где Um1, ψ – константы; р – число пар полюсов ВТ.
Схема фазовращателя с однофазным питанием приведена на рис.1.9,б. К роторным обмоткам присоединяются нагрузка zН, емкость С1 и резистор R1. Для получения режима фазовращателя необходимо соблюдать условия

 (1.17)
(1.17)
где  и
и  — выходные сопротивления ВТ; ω – частота питания.
— выходные сопротивления ВТ; ω – частота питания.
Частота питания ВТ обычно лежит в окрестности
2 кГц. При этом > . Для соблюдения условия (1.17) последовательно с каждой обмоткой ротора включают добавочный резистор.
На основе ВТ также строятся системы дистанционной передачи угла (СДПУ), подобные трансформаторной СДПУ на сельсинах. Возможный вариант такой системы приведен на рис. 1.10.
Рис. 1.10. Вариант СДПУ с использованием ВТ
Ротор вращающегося трансформатора – датчика ВТ-Д связан с ведущим валом. Ротор вращающегося трансформатора – приемники ВТ-П соединен с ведомым валом — валом объекта управления ОУ. Роторная обмотка ВТ-П питается переменным напряжением возбуждения uв. ЭДС, наводимые в статорной обмотке ВТ-П, питают статорную обмотку ВТ-Д. В роторной обмотке ВТ-Д наводится ЭДС еу, величина которой зависит от угла рассогласования a между положениями роторов ВТ-Д и ВТ-П. При a = 0 ЭДС еу = 0.Напряжение роторной обмотки ВТ-Д uу, поступающее в устройство управления УУ, является сигналом задания скорости двигателя ОУ. Если a ¹ 0, то и ЭДС uу ¹ 0 и М1 вращает вал ОУ до устранения рассогласования a. При повороте ротора ВТ-Д на заданный угол на тот же угол поворачивается вал, с которым связан ротор ВТ-П.
Рассматриваемая система используется, например, в станках с ЧПУ. При управлении координатой станка от устройства ЧПУ используется лишь ВТ-П. Выходные напряжения статорной обмотки ВТ-П служат для получения сигнала обратной связи по положению. При «ручном» управлении система переключается в режим СДПУ (рис.1.10) и координата станка управляется за счет поворота ротора ВТ-П.
Вращающиеся трансформаторы являются более точными датчиками, чем сельсины.
К примеру, у синусных ВТ погрешность отображения функциональной зависимости для разных классов точности составляет от 0,005 до 0,2 %. Погрешность вычисляется относительно наибольшего значения выходного напряжения.
2. ЛАБОРАТОРНАЯ РАБОТА
«ИССЛЕДОВАНИЕ СЕЛЬСИНОВ»
Цель работы
Целью работы является изучение конструкций и принципа действия сельсинов, исследование характеристик сельсинов и систем синхронной связи на их основе.
Рекомендуемые страницы:
Вращающиеся трансформаторы: принцип работы, устройство, применение
Вращающимся, или как его еще называют, поворотным трансформатором (ВТ), называют электрические устройства индукционного типа, предназначенные для получения определенных значений переменного напряжения, в зависимости от угла поворота ротора.
Конструктивные особенности
Конструкция поворотного трансформатора состоит из статора и ротора. Они выполнены из набранных и изолированных между собой пластин из электротехнической стали, в которых сделаны пазы для укладки обмоток: двух взаимно перпендикулярных на роторе, и двух взаимно перпендикулярных на статоре.
Пространственный сдвиг обмоток ротора и статора составляет 90 угловых градусов относительно друг друга. Концы обмоток статора закрепляются непосредственно на неподвижных клеммах, а концы обмоток ротора подсоединяются к клеммам через токосъемные щетки или контактные кольца. Если угол поворота ротора ограничен, то допускается соединение обмоток ротора с клеммником, посредством гибких проводников.
Типы вращающихся трансформаторов
В зависимости от способа включения обмоток ротора и статора, поворотный трансформатор может быть:
- синусно-косинусный, который позволяет получать переменные напряжения, пропорциональные sin a или cos a, в зависимости от использующейся обмотки ротора. Если используется обе обмотки, то получаем синусно-косинусный поворотный трансформатор;
- линейный. Этот тип трансформатора дает возможность получить переменное напряжение, которое находится в прямолинейной зависимости от угла а;
- построитель. Такие поворотные трансформаторы применяются в автоматических устройствах для решения геометрических или математических задач, в качестве преобразователя пространственных координат;
- масштабный. Вращающиеся трансформаторы этого типа могут использоваться в фазовращателях для согласования напряжений в отдельных модулях некоторых автоматических устройств, или в качестве датчика или приемника при синхронизации угла поворота ротора и т.д.
На сегодняшний день, наиболее востребованными вращающимися трансформаторами являются устройства, основанные на синусно-косинусном подключении обмоток ротора.
Принцип работы
Если поворотный трансформатор применяется в режиме поворота ротора до определенного угла, то обмотками компенсации и возбуждения этого устройства будут являться обмотки статора. В случае применения ВТ в режиме непрерывного вращения, в качестве компенсационной и возбуждающей обмоток будут выступать обмотки ротора, а в качестве вторичных обмоток – статора. Если устройство применяется в качестве измерительного прибора, то ВТ применяется со специальным редукторным механизмом повышенной точности позиционирования ротора. Редуктор может иметь внешнее подключение к валу устройства, а может монтироваться непосредственно в корпус поворотного трансформатора.
При подаче переменного тока со стабилизированным напряжением определенного значения на обмотку возбуждения, вырабатывается пульсирующий магнитный поток, который индуцирует электродвижущую силу в обмотках ротора, значение которой прямо пропорционально углу поворота ротора. Этот угол отсчитывается от положения ротора, когда его обмотка находится перпендикулярно к оси обмотки возбуждения.
Магнитные потоки, создающие электродвижущую силу в обмотках ротора, можно разделить на две группы: продольные, совпадающие с осью обмотки возбуждения и поперечные, к оси обмотки возбуждения. Продольные потоки приводят в движение ротор вращающегося трансформатора, а поперечные магнитные потоки, индуцируемые в обмотках, приводят к появлению погрешностей.
Меры борьбы с погрешностями
Для борьбы с поперечными магнитными потоками, в современном приборостроении применяют метод симметрирования, который может быть выполнен как на обмотках статора, так и ротора. Симметрирование на обмотках ротора заключается во взаимной компенсации поперечных магнитных потоков нагрузкой, в роли которой выступают два сопротивления одинаковых по значению. При симметрировании на обмотках статора происходит ослабление поперечных магнитных потоков за счет эффекта размагничивания перпендикулярно расположенной к ней обмотки статора.
Пределы погрешностей наиболее распространенных двухполюсных синусно-косинусных поворотных трансформаторов, варьируются в пределах 0,005 — 0,2 %. Погрешность высокоточных ВТ не должна превышать значений 0,01 – 0,03 %. Погрешность поворотных трансформаторов, выступающих в качестве синхронизирующих датчиков, составляет 1-10 угловых минут. Прецизионные трансформаторы поворотного типа имеют погрешность не более 1 угловой минуты. Если требуется более высокая точность позиционирования, то в таком случае, чаще всего, применяются многополюсные ВТ. Погрешность такого устройства не превышает 30 угловых секунд.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Поворотные трансформаторы | Общие сведения об электрических машинах
Страница 22 из 25
ПОВОРОТНЫЕ ТРАНСФОРМАТОРЫ*
Общие сведения, классификация
Поворотные трансформаторы (ПТ) применяются в схемах автоматики и счетно-решающих устройствах в тех случаях, когда на их выходе нужно получить напряжение, пропорциональное некоторым функциям угла поворота ротора а (sina или cos а), а также самому углу а. Соответственно этому различают режимы работы ПТ: синусно-косинусный поворотный трансформатор (СКПТ) и линейный поворотный трансформатор (ЛПТ).
Рис. 355. Схема синусного поворотного трансформатора.
* Поворотные трансформаторы называются также вращающимися.
Поворотный трансформатор также используется как построитель (ПТП) для определения вектора в прямоугольной системе координат по его составляющим.
Поворотные трансформаторы представляют собой индукционные машины, конструктивно схожие с маломощными асинхронными машинами с фазным ротором и контактными кольцами. В пазах статора и ротора размещено по две распределенных обмотки, сдвинутых относительно друг друга на 90° эл. (рис. 355): на статоре главная обмотка С1С2, являющаяся обмоткой возбуждения, и вспомогательная обмотка С3С4, называемая квадратурной; на роторе две вторичные обмотки — синусная Р1Р2 и косинусная Р3Р4. Угол поворота ротора принято отсчитывать от оси вспомогательной обмотки С3С4 до оси синусной обмотки ротора Р1Р2. Обе обмотки статора обычно выполнены одинаковыми: с одним и тем же числом витков, одним сечением провода, одинаковой схемой соединения секций. Одинаковыми выполняются и роторные обмотки.
Статор и ротор собирают из листов электротехнической стали или пермаллоя — материала с малым магнитным сопротивлением. Поворотные трансформаторы с магнитопроводом из пермаллоя целесообразно применять в случае, когда на ПТ подается меняющееся по эффективному значению напряжение (это зависит от размещения поворотного трансформатора в схемах автоматики). Малое по сравнению с магнитным сопротивлением воздушного зазора магнитное сопротивление магнитопровода из пермаллоя практически исключает влияние различной степени насыщения при изменении напряжения на параметры машины. Таким образом предотвращается ошибка, связанная с изменением параметров поворотного трансформатора при его работе.
При повороте ротора поворотного трансформатора взаимная индуктивность между обмотками статора и ротора должна с высокой точностью изменяться по синусоидальному закону в зависимости от угла этого поворота. Тогда э.д.с. взаимоиндукции, индуктируемые во вторичных обмотках, будут получаться синусоидальными, что необходимо для поворотного трансформатора. Отклонение от этого закона определяет ошибку поворотного трансформатора, во многих случаях это отклонение не должно превышать 0,05%.
Конструкция и технология изготовления поворотного трансформатора всецело подчинены выполнению требуемого условия изменения взаимоиндуктивности между обмотками статора и ротора. С этой целью несколько увеличен воздушный зазор между статором и ротором, уменьшено насыщение магнитопровода, выполнение обмотки предусматривает уменьшение пространственных гармонических н.с., применен скос пазов статора (или ротора), пакеты статора и ротора собраны веерным способом для обеспечения равенства магнитных проводимостей по осям машины.
Синусно-косинусный поворотный трансформатор
Обмотка возбуждения статора C1C2 подключена к сети переменного тока. Сеть может быть как нормальной частоты f = 50 гц, так и повышенной 400- 1000 гц.
Ограничимся выяснением физических принципов работы поворотных трансформаторов и для упрощения ни здесь, ни в дальнейшем не будем учитывать собственные параметры обмоток (активные сопротивления и индуктивные сопротивления рассеяния).
Поскольку в поворотных трансформаторах, работающих в режиме СКПТ, выходное напряжение должно изменяться но закону синуса или
косинуса от угла поворота ротора, необходимо устранить поперечный магнитный поток Ф. Это можно сделать путем соответствующей нагрузки второй роторной обмотки, косинусной (так называемое вторичное симметрирование) или замыкания вспомогательной обмотки статора, квадратурной, на небольшое внешнее сопротивление (первичное симметрирование).
Вторичное симметрирование. К косинусной обмотке ротора Р3Р4, остававшейся разомкнутой, подключают сопротивление нагрузки ZHагр2 (на рис. 355 эта часть схемы показана пунктиром). Ток косинусной обмотки 2 создает н.с. Fр2 по оси этой обмотки, ее продольная составляющая Fр2cosa аналогично продольной составляющей синусной обмотки Fpi sin а действует размагничивающе, увеличивая ток обмотки возбуждения статора. Поперечная составляющая н.с. косинусной обмотки Fp2sin а направлена навстречу поперечной составляющей н.с. синусной обмотки Fp1 cos а; сопротивление нагрузки Zнагp2 подбирают так, чтобы обе эти н.с. были равны. Тогда поперечный поток в поворотном трансформаторе будет практически отсутствовать.
Первичное симметрирование. Косинусная обмотка ротора Р3Р4 остается разомкнутой, но вспомогательную обмотку статора (квадратурная) С3С4 замыкают или на небольшое сопротивление, или накоротко (последнее относится к случаю, когда поворотный трансформатор присоединен к сети с неизменным напряжением). На рисунке 355 замыкание обмотки С3С4 не показано. Поперечный поток, созданный синусной обмоткой ротора Р1Р2, будучи направлен по оси вспомогательной обмотки С3С4, индуктирует в ней э.д.с., и возникающий ток по закону Ленца своим действием ослабляет поперечный поток обмотки ротора. Практически поперечный поток в поворотном трансформаторе будет близок к нулю.
Поворотный трансформатор-построитель
Поворотный трансформатор-построитель используется для определения значения вектора по его составляющим в прямоугольной системе координат или же для решения обратной задачи разложения вектора на его составляющие. Электрическая схема поворотного трансформатора-построителя, решающего прямую задачу, дана на рисунке 358. Обмотки статора — возбуждения С1С2 и квадратурная С3С4 присоединены к сети через потенциометры. Синусная обмотка ротора Р1Р2 включена на прибор, который может быть отградуирован в линейных мерах. Косинусная обмотка ротора Р2Р4 питает обмотку управления асинхронного конденсаторного исполнительного двигателя.
К обмоткам статора С1С2 и С3С4 подводятся напряжения, пропорциональные составляющим вектора ах и ау по осям координат Uc1=ax и ис2 = ау. Н. с. этих обмоток создадут пульсирующие по осям обмоток С1С2 и С3С4 потоки Фс1 и ФС2, которые при отсутствии насыщения будут пропорциональны напряжениям Uc1 и Uc2 (рис. 358). При геометрическом сложении этих потоков возникнет результирующий магнитный поток Ф, расположенный в пространстве относительно обмоток С1С2 и С3С4 под теми же углами, что и искомый вектор. Величины потоков Фс1, Фс2 и Ф будут пропорциональны составляющим векторов ах, ау и вектору а.
Рис. 358. Схема поворотного трансформатора-построителя.
Результирующий магнитный поток Ф наведет в обмотках ротора э.д.с. Ер1 и Ер2. Э.д.с. косинусной обмотки Ер2 создаст на зажимах обмотки управления исполнительного двигателя напряжение (сигнал), ротор исполнительного двигателя начнет вращаться и повернет ротор трансформатора построителя, с которым он связан механически. Э.д.с. синусной обмотки ротора Ер, создаст на зажимах прибора напряжение Up1.
При повороте ротора э.д.с. его обмоток Ер1 и Ер2 будут изменяться по значению в соответствии с положением в пространстве осей этих обмоток относительно оси результирующего магнитного потока Ф. Когда ось косинусной обмотки ротора Р3Р4 станет перпендикулярна оси магнитного потока Ф, э.д.с. этой обмотки станет равной нулю, и ротор исполнительного двигателя остановится. При этом ось синусной обмотки ротора Р1Р2 совпадет с осью результирующего магнитного потока Ф, и прибор покажет максимально возможное напряжение UpU которое будет пропорционально модулю вектора а.
Более сложные схемы трансформаторов-построителей, а также работа поворотных трансформаторов в режиме вращения рассматриваются в литературе по микромашинам.
Вращающиеся трансформаторы
Вращающиеся (поворотные) трансформаторы (ВТ) применяются в различных автоматических и вычислительных устройствах для преобразования угла поворота в переменное напряжение, амплитуда которого изменяется по заданному закону в функции от угла.
Наибольшее распространение получили двухполюсные и многополюсные вращающиеся трансформаторы с двумя обмотками на статоре, смещенными на электрический угол л/2, и такими же обмотками на роторе. Вращающиеся трансформаторы этого типа имеют конструкцию, подобную асинхронному двигателю с двухфазными обмотками на роторе и статоре. Для подведения напряжения к обмоткам ротора используются щетки и контактные кольца, а при ограниченном угле поворота также гибкие проводники. В «бесконтактных» вращающихся трансформаторах обмотки ротора питаются с помощью двух промежуточных кольцевых трансформаторов (КТ), показанных на рис. 50.5.
Для выполнения вращающимся трансформатором своих функций взаимная индуктивность между обмотками статора и ротора должна меняться в зависимости от электрического угла поворота а по синусоидальному или косинусоидальному закону. Чтобы добиться высокой точности в воспроизведении функций sina и cosa, стремятся получить форму магнитных полей обмоток возможно более близкой к синусоидальной. С этой целью применяют так называемые синусные обмотки, в которых числа витков в пазах изменяются соответствующим образом. Кроме того, для получения однородных магнитных свойств прибегают к веерной сборке листов магнитопроводов, смещая каждый следующий слой по отношению к предыдущему на одно или несколько зубцовых делений.

«Бесконтактный» вращающийся трансформатор:
1 — вращающийся магнитопровод КТ; 2 — вращающаяся обмотка КТ; 3 — неподвижная обмотка КТ; 4 — неподвижный магнитопровод КТ; 5 — обмотка статора ВТ; б — магнитопровод статора ВТ; 7 — магнитопровод ротора ВТ; 8 — обмотка ротора ВТ
Для уменьшения ЭДС, индуктированных высшими гармоническими поля, делают скос пазов ротора на одно зубцовое деление. Большое внимание обращают также на уменьшение погрешностей, связанных с неточностью изготовления: эксцентриситетом поверхностей статора и ротора, обращенных к зазору, асимметрией магнитопровода, неточностью скоса паза. Благодаря всем этим мерам максимальная погрешность воспроизведения функций sin а и cos а в ВТ высокого класса точности не превышает 0,01—0,02%.
В многополюсных ВТ период изменения выходного напряжения соответствует повороту ротора на угол 2к/р и на один оборот ротора приходится р периодов изменения напряжения. Поэтому погрешность воспроизведения выходного напряжения, отнесенная к геометрическому углу поворота ротора, уменьшается в р раз по сравнению с погрешностью, отнесенной к электрическому углу. В многополюсных ВТ высокой точности число периодов р достигает 60—1 Обмотки в таких ВТ выполняются сосредоточенными. Для повышения точности воспроизведения функций sin а и cos а выбирается оптимальная ширина зубцов и применяется скос пазов на одно зубцовое деление. Схемы включения и питания обмоток ВТ зависят от выполняемых им функций.
Синусно-косинусный ВТ (рис. 2б) предназначается для преобразования угла поворота а в два переменных напряжения Ua и Ub, амплитуды которых пропорциональны соответственно cos а и sin а. Обмотка статора /является обмоткой возбуждения. Она питается от сети переменного тока со стабилизированным напряжением. Пульсирующее магнитное поле, образуемое этой обмоткой, индуктирует в обмотке ротора а ЭДС Еа, пропорциональную cos а, и в обмотке ротора b ЭДС Еь, пропорциональную sin а. При подключении к обмоткам ротора нагрузки в виде сопротивлений ZHQ и ZHb в них появляются токи и образуется вторичное магнитное поле. Во избежание искажения вторичным полем косинусной или синусной зависимости ЭДС Еа и Еь от угла а прибегают к так называемым вторичному и первичному симметрированиям поворотного трансформатора.

Рис. 2. Схема синусно-косинусного вращающегося трансформатора
Рис. 3 Схема линейного вращающегося трансформатора
Для осуществления вторичного симметрирования выбирают одинаковые сопротивления нагрузок обмоток ротора ZHa = ZHb. Первичное симметрирование производится путем замыкания квадратурной обмотки статора к на сопротивление ZHk, равное по значению внутреннему сопротивлению источника питания обмотки. При этом в контурах обмоток к и / индуктируются токи, компенсирующие вторичные потоки с одинаковой интенсивностью.
Линейный ВТ (рис. 3) предназначается для преобразования угла поворота а в переменное напряжение Ub, амплитуда которого пропорциональна углу а. В схеме линейного вращающегося трансформатора обмотка статора /и косинусная обмотка ротора а включаются последовательно и присоединяются к сети переменного тока, квадратурная обмотка к замыкается накоротко. Выходное напряжение Ub снимается с синусной обмотки 6, включенной на сопротивление нагрузки.
В такой схеме составляющая вторичного потока по оси коротко-замкнутой обмотки к почти полностью демпфируется индуктированным в ней током. Поэтому, анализируя работу вращающегося трансформатора, поперечную составляющую потока по оси обмотки к можно не учитывать и считать, что ЭДС индуктируются только продольным полем.
Назначение и устройство вращающихся трансформаторов
Bpaщaющиecя (поворотные)
трансформаторы (BT) предназначены для
получения переменного напряжения,
зависящего от угла поворота ротора. По
назначению BT относятся к информационным
электрическим машинам и применяются
в системах автоматического регулирования
в качестве измерительных элементов
(датчиков угла) для измерения рассогласования
между двумя вращающимися Осями. B
вычислительных устройствах вращающиеся
трансформаторы используют при решении
различных математических задач, связанных
с построением треугольников, преобразованием
координат, сложением и разложением
векторов и т.п. Вращающийся трансформатор
конструктивно представляет электрическую
Машину индукционного типа малой мощности.
Наибольшее применение получили
двухполюсные BT с двумя парами одинаковых
взаимно перпендикулярных обмоток:
обмотки  и
и
 (C1
— C2 и C3
— C4) расположены
на статоре; обмотки
(C1
— C2 и C3
— C4) расположены
на статоре; обмотки  и
и (P1 — P2 и P3 — P4) — на роторе (рис.1). Обмотка возбуждения
(C1— C2) включается в сеть переменного тока,
компенсационная обмотка C3
— C4 замыкается
накоротко или на резистор. Обмотки на
роторе называются вторичными: синусной P1—P2 и косинусной P3—P4, электрический контакт с обмотками
ротора осуществляется с помощью
контактных колец и щеток (аналогично
контактным сельсинам) либо посредством
спиральных пружин, если BT работает в
режиме ограниченного угла поворота. B
последнем случае yгoл пoвopoтa poтopa BT
oгpaничивaeтcя мaкcимaльным yглoм зaкpyчивaния
cпиpaльныx пpyжин.
(P1 — P2 и P3 — P4) — на роторе (рис.1). Обмотка возбуждения
(C1— C2) включается в сеть переменного тока,
компенсационная обмотка C3
— C4 замыкается
накоротко или на резистор. Обмотки на
роторе называются вторичными: синусной P1—P2 и косинусной P3—P4, электрический контакт с обмотками
ротора осуществляется с помощью
контактных колец и щеток (аналогично
контактным сельсинам) либо посредством
спиральных пружин, если BT работает в
режиме ограниченного угла поворота. B
последнем случае yгoл пoвopoтa poтopa BT
oгpaничивaeтcя мaкcимaльным yглoм зaкpyчивaния
cпиpaльныx пpyжин.
П
Рис.1
pинцип paбoты вpaщaющиxcя тpaнcфopмaтopoв ocнoвaн нa взaимнoй индyктивнocти мeждy oбмoткaми cтaтopa и poтopa, кoтopaя измeняeтcя в oпpeдeлeннoй фyнкциoнaльнoй зaвиcимocти oт yглa пoвopoтa poтopa.·Элeктpoдвижyщиe cилы, нaвoдимыe пyльcиpyющим мaгнитным пoтoкoм вoзбyждeния в oбмoткax poтopa, cтpoгo cлeдyют этoй зaвиcимocти. Ecли BT иcпoльзyeтcя в кaчecтвe измepитeльнoгo элeмeнтa, тo пoвopoт poтopa ocyщecтвляeтcя пocpeдcтвoм peдyктopнoгo мexaнизмa выcoкoй тoчнocти, кoтopый либo вcтpaивaeтcя в кopпyc BT, либo мoнтиpyeтся отдельно от ВТ и соединяется с его валком. ecли BT пpeднaзнaчeн для paбoты в peжимe пoвopoтa poтopa в пpeдeлax oпpeдeлeннoгo yглa, тo в кaчecтвe oбмoтoк вoзбyждeния и кoмпeнcaциoннoй иcпoльзyютcя oбмoтки cтaтopa, a в кaчecтвe втopичныx — oбмoтки poтopa.Ecли BT paбoтaeт в peжимe нeпpepывнoгo вpaщeния poтopa, тo oбычнo пpимeняют «oбpaтнoe» иcпoльзoвaниe oбмoтoк: oбмoтки poтopa иcпoльзyют в кaчecтвe oбмoтoк вoзбyждeнйя и кoмпeнcaциoннoй, a oбмoтки cтaтopa —в кaчecтвe втopичныx· Ecли кoмпeнcaциoннaя oбмoткa зaмыкaeтcя нaкopoткo, тo пpи «oбpaтнoм» иcпoльзoвaнии oбмoтoк нa poтope пpимeняют лишь двa кoнтaктныx кoльцa, чтo yпpoщaeт кoнcтpyкцию, пoвышaeт нaдeжнocть и тoчнocть BТ.
B зaвиcимocти oт гpaфикa фyнкциoнaльнoй зaвиcимocти ЭДC втopичнoй oбмoтки oт yглa пoвopoтa poтopa вpaщaющиecя тpaнcфopмaтopы paздeляют нa cлeдyющиe типы:
cинycнo-кocинycный вpaщaющийcятpaнcфopмaтop (CKBT) — y нeгo вoзникaют нaпpяжeние
 нa выxoдe oбмoтки,
нaxoдящeеcя в cинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a, и нaпpяжeниeнa выxoдe oбмoтки, нaxoдящeecя в кocинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a;
нa выxoдe oбмoтки,
нaxoдящeеcя в cинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a, и нaпpяжeниeнa выxoдe oбмoтки, нaxoдящeecя в кocинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a;линeйный вpaщaющийcя тpaнcфopмaтop (ЛBT) — y нero выxoднoe нaпpяжeниe
нaxoдитcя в пpямoлинeйнoй зaвиcимocти oт yглa;вpaщaющийcя тpaнcфopмaтop — пocтpoитeль (ПBT) — пpeднaзнaчeн для peшeния гeoмeтpичecкиx зaдaч·
 нa выxoдe oбмoтки
нa выxoдe oбмoтки ,
нaxoдящeеcя в cинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a, и нaпpяжeниe
,
нaxoдящeеcя в cинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a, и нaпpяжeниe нa выxoдe oбмoтки
нa выxoдe oбмoтки , нaxoдящeecя в кocинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a;
, нaxoдящeecя в кocинycнoй зaвиcимocти oт yглa
пoвopoтa poтopa a; нaxoдитcя в пpямoлинeйнoй зaвиcимocти oт yглa
нaxoдитcя в пpямoлинeйнoй зaвиcимocти oт yглa ;
;Kpoмe тoгo, вpaщaющиecя тpaнcфopмaтopы мoгyт пpимeнятьcя в кaчecтвe мacштaбныx тpaнcфopмaтopoв (MBT) для coглacoвaния нaпpяжeний oтдeльныx кacкaдoв aвтoмaтичecкoro ycтpoйcтвa, фaзoвpaщaтeлeй, элeктpичecкиx мaшин cинxpoннoй cвязи тpaнcфopмaтopныx cиcтeмax диcтaнциoннoй пepeдaчи yглa.

H
Рис.2
a pиc.2 пoкaзaнo ycтpoйcтвo вpaщaющeгocя тpaнcфopмaтopa, B кopпyce1 pacпoлoжeн шиxтoвaнный сepдeчник cтaтopa 2, в пaзы кoтopoгo yлoжeны pacпpeдeлeнныe oбмoтки 3. B пaзax шиxтoвaннoгo cepдeчникa poтopa 4 тaкжe нaxoдятcя pacпpeдeлeнныe oбмoтки 5 Элeктpичecкий кoнтaкт oбмoтoк poтoµa c вывoдными клeммaми 6 ocyщecтвляeтcя пocpeдcтвoм щeтoк 7 и кoнтaктныx кoлeц 8.