Схемы управления асинхронными электродвигателями | Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Подробности
- Категория: Разное-архив
- РЗиА
- потребитель
- оборудование
- низковольтное
- подстанции
- среднее напряжение
Содержание материала
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Газоразрядные лампы
- Установки для электрического освещения
- Облучение растений в теплицах
- Применение осветительных установок на птицефермах
- Установки ультрафиолетового облучения
- Установки инфракрасного нагрева
- Электротехнологические установки
- Установки электронно-ионной технологии
- Ультразвуковая техника
- Установки для магнитной обработки материалов
- Устройства для обработки сред электрическим током
- Электропривод и его основные части
- Характеристики и режимы работы электродвигателей
- Регулирование скорости в электроприводах
- Выбор электродвигателей
- Аппаратура управления электродвигателями
- Рубильники и переключатели
- Путевые выключатели
- Контакторы и электромагнитные пускатели
- Реле управления
- Тиристорные пускатели
- Логические элементы
- Плавкие предохранители
- Автоматические выключатели
- Тепловые реле и температурная зашита
- Автоматическое управление электроприводами
- Принципы управления двигателями постоянного тока
- Схемы управления асинхронными электродвигателями
- Блокировочные связи и сигнализация в схемах управления электроприводами
- Следящий привод, применение магнитных и тиристорных усилителей
- Дистанционное управление электроприводами
- Электропривод ручных инструментов и стригальных машинок
- Управление электроприводами поточных линий
- Электропривод поточных линий приготовления кормов
- Управление поточными линиями кормораздачи
- Управление электроприводами комплекса машин по удалению навоза и помета
- Эффективность и перспективы электрификации тепловых процессов, способы нагрева
- Способы охлаждения и типы холодильных машин
- Электродуговые нагреватели
- Индукционные и диэлектрические нагреватели
- Автоматизация электронагревательных установок
- Выбор и настройка автоматических регуляторов электронагревательных установок
- Электрические водонагреватели и котлы
- Электродные водогрейные и паровые котлы
- Электрооборудование и автоматизация электрокотельных, электрокалориферные установки
- Электрообогреваемые полы
- Средства местного электрообогрева
- Электрические инкубаторы
- Электрический обогрев парников и теплиц
- Установки для электротепловой обработки продуктов и кормов
- Электротерморадиационная и высокочастотная сушка
- Электротепловая обработка пищевых продуктов и кормов
- Электротермические печи
- Электросварочное оборудование
- Высокочастотные установки
- Низкотемпературные установки
- Холодильные производственные установки
Страница 29 из 59
Управление двигателями с короткозамкнутым ротором.
Асинхронные электродвигатели с короткозамкнутым ротором, как правило, управляются при помощи магнитных пускателей. Пуск электродвигателей осуществляется непосредственным включением на полное напряжение.
Простейшая схема управления двигателем с нереверсивным магнитным пускателем показана на рисунке 13.1. В этой схеме предусматривается питание силовых цепей и цепей управления от одного источника напряжения.
При включении автомата F напряжение подается на силовые и вспомогательные цепи схемы. Нажатием кнопки S2 замыкается цепь катушки магнитного пускателя К, при этом главные контакты К замыкаются и включают двигатель в сеть. Одновременно блок-контакт К шунтирует кнопку S2 и дальнейшее удержание кнопки в нажатом состоянии становится ненужным.
В схеме предусмотрена защита электродвигателя от коротких замыканий и перегрузки при помощи автоматического выключателя, который для этой цели содержит комбинированный расцепитель.

Схема магнитного пускателя с кнопочными выключателями осуществляет также защиту от самопроизвольных включений электродвигателя (нулевая защита) при восстановлении напряжения питания после кратковременного его исчезновения. Повторный пуск электродвигателя возможен только после вторичного нажатия кнопки S2. В тех случаях, когда необходимо изменять направление вращения, управляют электродвигателем реверсивным магнитным пускателем, схема которого показана на рисунке 13.7.
При нажатии кнопки S1 получает питание катушка К1 магнитного пускателя, замыкаются силовые контакты в главной цепи и статор двигателя присоединяется к сети при прямом чередовании фаз.
При нажатии кнопки S2 ее размыкающий контакт, установленный в цепи катушки К1, размыкается, благодаря чему реверс электродвигателя может быть произведен без предварительного нажатия кнопки S3. Чередование фаз при этом меняется на обратное.

Электродинамическое торможение осуществляется путем отключения обмоток статора электродвигателя от сети переменного тока и подачей в них постоянного тока на период торможения.
Торможением противовключением осуществляется при помощи реверсивного магнитного пускателя и реле контроля скорости.
 Одновременно с началом вращения приводится в действие вал реле контроля скорости и срабатывают соответствующие контакты Е1 или Е2, которые подготавливают цепи катушек контакторов К1 или К2 к работе.
Одновременно с началом вращения приводится в действие вал реле контроля скорости и срабатывают соответствующие контакты Е1 или Е2, которые подготавливают цепи катушек контакторов К1 или К2 к работе.Рис. 13.8 Схема торможения асинхронного электродвигателя методом противовключения.
При остановке двигателя кнопкой S3 разрывается цепь ранее возбужденной катушки, отпадают контакты контакторов К1 или К2, а блок-контактом замыкаются цепи катушки контактора К1 в том случае, если электродвигатель работал в режиме «вперед», и наоборот. Таким образом, привод осуществляет реверс, однако двигатель продолжает вращаться в прежнем направлении, работая в тормозном режиме противовключения.
Рис. 13.9. Схема автоматического управления асинхронным электродвигателем с фазным ротором.
Частота вращения ротора уменьшается, и как только частота вращения станет близкой к нулю, контакты реле контроля скорости разомкнут цепи катушек контакторов К1 или К2 и отключат статор двигателя от сети.

Управление двигателями с фазным ротором. Пуск, торможение и регулирование частоты вращения электродвигателей с фазным ротором сопряжены с изменением сопротивлений, включенных в роторную цепь. Сопротивления должны изменяться в определенной последовательности.
На рисунке 13.9 показана схема автоматического управления двигателем с фазным ротором при помощи командоконтроллера, резисторы могут быть использованы как пусковые и регулировочные.
Для подготовки к пуску двигателя рукоятку командоконтроплера устанавливают в нулевое положение. При этом получают питание реле напряжения К.1, которое, сработав, зашунтирует контакт контроллера, замыкающийся только в нулевом положении. В положении 1 режима «Вперед» оказывается под напряжением катушка контактора К2, который срабатывает и своими главными контактами подключает статор двигателя к сети при введенных полностью ступенях реостата. Одновременно срабатывает реле К4, которое посредством своего замыкающего контакта замкнет цепь контактора противовключения К5, а последний своими главными контактами выключит резисторы противовключения в роторе и подготовит цепь для питания катушки первого контактора ускорения Кб.
Реле времени, встроенные в контакторы К5, Кб, К7, обеспечивают минимальное время переключения пусковых сопротивлений, а увеличение времени пуска может быть достигнуто вручную медленным передвижением рукоятки контроллера. Аналогичным образом работает схема при перемещении рукоятки контроллера из нулевого положения в положения 1, 2, 3, 4 «Назад», только при этом будет включен контактор К3. Если оператор мгновенно переведет рукоятку из положения 4 «Вперед» в положение 4 «Назад», то вначале последовательно отключатся контакторы К8, К7, Кб, К5 ив цепь ротора будут введены все ступени реостата.
 Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.
Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.Для остановки двигателя рукоятку командоконтроллера необходимо поставить в нулевое положение.
 Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.
Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Архив
- Разное архив
- Новое взрывозащищенное электрооборудование
Еще по теме:
- Защита сельских сетей от кз
- Электрические аппараты и оборудование выше 1000В
- Электрификация сельскохозяйственного производства
- В помощь сельскому электромонтеру
- Электромонтер строительной площадки
Схемы управления электроприводами | Электротехника и электрооборудование
Страница 27 из 39
Электропривод машин, применяемых на строительстве или на предприятиях строительной индустрии, может быть ручным неавтоматизированным или автоматизированным.
Неавтоматизированным называют электропривод, управление которым при всех режимах работы производят аппаратами ручного управления.
Автоматизированным электроприводом называют такой, в котором управление переходными режимами — пуском, регулированием скорости, торможением, остановкой и т. п. — производят автоматически, после того, как подан первый командный импульс.
В настоящее время на строительных машинах широко применяют релейно-контакторное управление электроприводами, осуществляемое электромагнитными контакторами, реле и командоаппаратами.
Электрической схемой называют чертеж, показывающий функциональные, электрические, магнитные и другие связи между частями электрической установки. Объем и характер сведений, содержащихся в электрической схеме, определяются ее назначением.
Схемы электрических устройств трехфазного тока могут быть трехлинейными и однолинейными. На трехлинейных схемах каждый провод вычерчивается отдельно, на однолинейных — три провода трехфазной проводки изображают одной линией.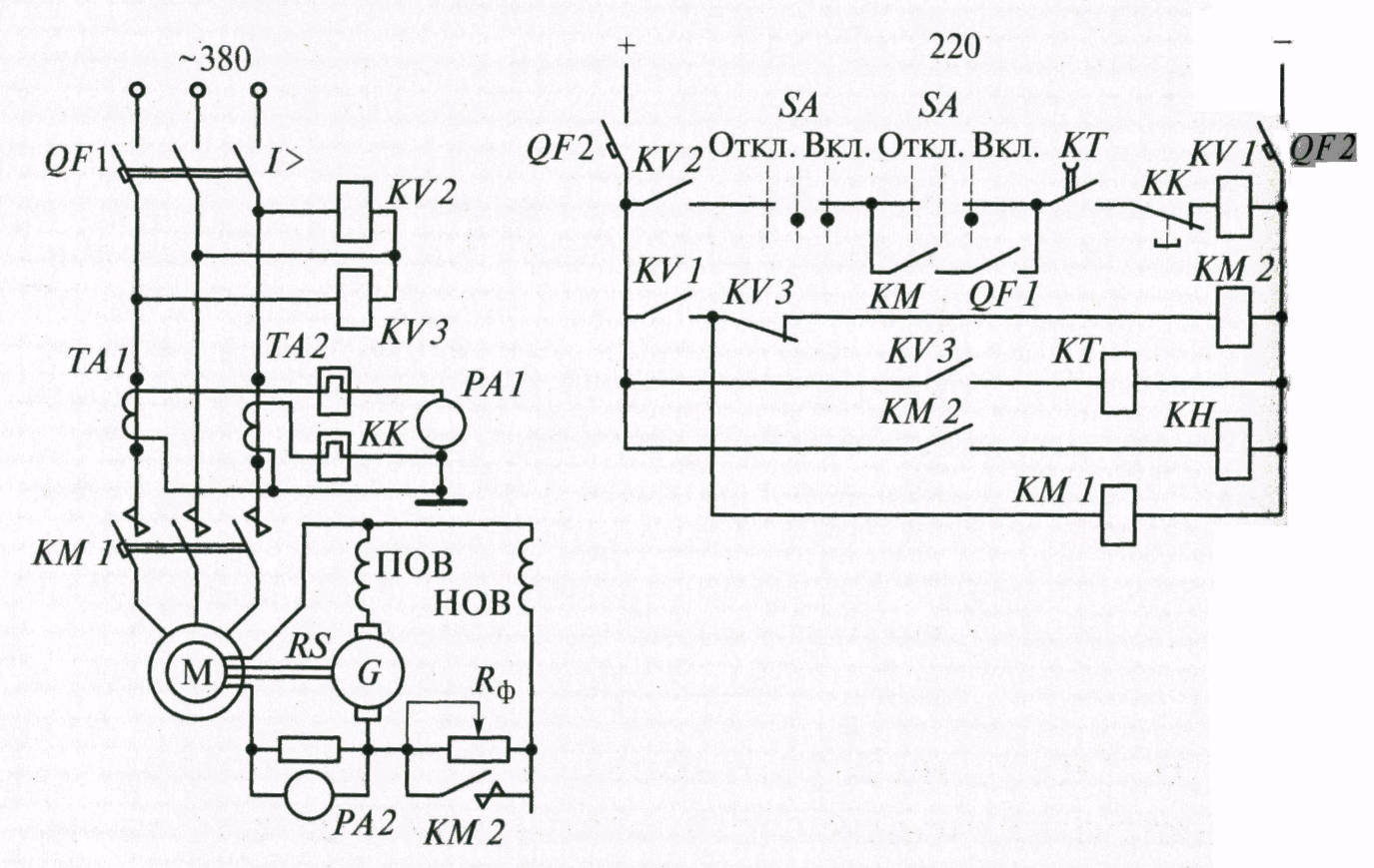 Иногда на проводах однолинейных схем делаются черточки, количество которых соответствует количеству проводов. Различают схемы первичной и вторичной коммутации. На схемах первичной коммутации показывают электрические машины и аппараты, шины и провода, т. е. элементы и электрические цепи электроустановки, по которым проходит поток передаваемой и распределяемой электроэнергии. На схемах вторичной коммутации показывают вспомогательные цепи: управления, сигнализации, измерения, защиты и т. п. Электрические схемы подразделяются на принципиальные и монтажные.
Иногда на проводах однолинейных схем делаются черточки, количество которых соответствует количеству проводов. Различают схемы первичной и вторичной коммутации. На схемах первичной коммутации показывают электрические машины и аппараты, шины и провода, т. е. элементы и электрические цепи электроустановки, по которым проходит поток передаваемой и распределяемой электроэнергии. На схемах вторичной коммутации показывают вспомогательные цепи: управления, сигнализации, измерения, защиты и т. п. Электрические схемы подразделяются на принципиальные и монтажные.
Рис. 13.6. Элементная схема управления электродвигателя с помощью магнитного пускателя
Принципиальные схемы обычно выполняют однолинейными для указания основных принципиальных данных, характеризующих электроустановку: мощность электромашин, принятые способы управления ими, применяемые при этом приборы измерения и т. п.
Существенные особенности имеют принципиальные схемы вторичной коммутации, в частности схемы управления и сигнализации в устройствах автоматизированного электропривода машин и механизмов.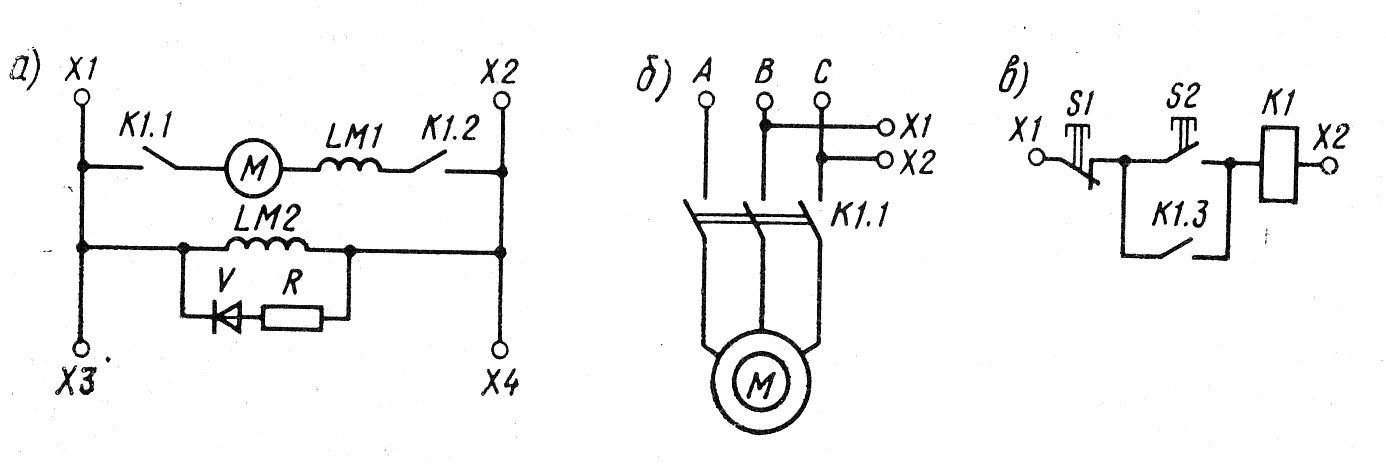 Эти схемы выполняются в виде так называемых элементных или развернутых схем, в которых приборы и аппараты изображены не как единое целое, а разобранными на составные элементы; катушки электромагнитов, главные контакты, вспомогательные блок-контакты, кнопки управления и т. п. Каждый элемент показывают отдельно и ставят в ту электрическую цепь, в которой он действует. На рис. 13.6 приведена элементная схема управления электродвигателем при помощи магнитного пускателя. Схема дана в двух вариантах: а — в совмещенном виде с показом силовых цепей и цепей управления и сигнализации; б — развернутая схема только цепей управления и сигнализации. Сложные схемы вторичной коммутации, как правило, изображают именно таким образом: все элементы располагают между двумя параллельными линиями, изображающими источник питания вторичных цепей, в данном случае две фазы трехфазной сети (могут быть также фаза и нуль четырехпроводной сети трехфазного тока или два полюса сети постоянного тока). В обозначениях на схеме все элементы одного аппарата имеют общую первую букву — на указанной схеме буква П — пускатель.
Эти схемы выполняются в виде так называемых элементных или развернутых схем, в которых приборы и аппараты изображены не как единое целое, а разобранными на составные элементы; катушки электромагнитов, главные контакты, вспомогательные блок-контакты, кнопки управления и т. п. Каждый элемент показывают отдельно и ставят в ту электрическую цепь, в которой он действует. На рис. 13.6 приведена элементная схема управления электродвигателем при помощи магнитного пускателя. Схема дана в двух вариантах: а — в совмещенном виде с показом силовых цепей и цепей управления и сигнализации; б — развернутая схема только цепей управления и сигнализации. Сложные схемы вторичной коммутации, как правило, изображают именно таким образом: все элементы располагают между двумя параллельными линиями, изображающими источник питания вторичных цепей, в данном случае две фазы трехфазной сети (могут быть также фаза и нуль четырехпроводной сети трехфазного тока или два полюса сети постоянного тока). В обозначениях на схеме все элементы одного аппарата имеют общую первую букву — на указанной схеме буква П — пускатель. На схеме рис. 13.6 кнопка «пуск» в положении «не включено», электродвигатель не работает, горит зеленая сигнальная лампа Лзел, питаемая через размыкающий в нормальном положении замкнутый контакт пускателя ПК2. При нажатии кнопки «пуск» замыкается цепь катушки электромагнита пускателя ПК, замыкаются главные контакты пускателя в цепи электродвигателя П — двигатель начинает работать, одновременно замыкается блок-контакт ПК1 и размыкается блок-контакт ПК2, в результате чего зеленая лампа гаснет, загорается красная, сигнализируя о том, что электродвигатель находится в работе. Кнопку «пуск» можно отпустить; она вернется в свое исходное положение, контакты ее разомкнутся, но ток в цепи управления будет по-прежнему проходить через катушку контактора, так как блок-контакт ПК1 теперь замкнут и создает обход цепи тока (принято говорить, что блок-контакт шунтирует кнопку «пуск»).
На схеме рис. 13.6 кнопка «пуск» в положении «не включено», электродвигатель не работает, горит зеленая сигнальная лампа Лзел, питаемая через размыкающий в нормальном положении замкнутый контакт пускателя ПК2. При нажатии кнопки «пуск» замыкается цепь катушки электромагнита пускателя ПК, замыкаются главные контакты пускателя в цепи электродвигателя П — двигатель начинает работать, одновременно замыкается блок-контакт ПК1 и размыкается блок-контакт ПК2, в результате чего зеленая лампа гаснет, загорается красная, сигнализируя о том, что электродвигатель находится в работе. Кнопку «пуск» можно отпустить; она вернется в свое исходное положение, контакты ее разомкнутся, но ток в цепи управления будет по-прежнему проходить через катушку контактора, так как блок-контакт ПК1 теперь замкнут и создает обход цепи тока (принято говорить, что блок-контакт шунтирует кнопку «пуск»).
Для остановки электродвигателя достаточно нажать кнопку «стоп». Контакты ее разомкнутся, цепь тока, питающего катушку электромагнита контактора пускателя, разорвется, якорь электромагнита под действием пружины отойдет от сердечника, разрывая при этом главные контакты и блок-контакт. Электродвигатель останавливается. В случае перегрузки работающего электродвигателя тепловые реле 1РТ и 2РТ, нагреватели которых включены в силовую цепь электродвигателя, размыкают свои контакты 1РТК и 2РТК, включенные в цепь управления; контактор пускателя отключается, электродвигатель останавливается. В случае короткого замыкания в электродвигателе мгновенно сгорают плавкие вставки предохранителей, отключая двигатель от сети. Магнитный пускатель отключает также электродвигатель от сети при исчезновении напряжения или понижении его ниже 50—70% номинального (электромагнит контактора при этих условиях не может удержать якорь в притянутом к сердечнику положений). Так же читаются и более сложные развернутые схемы.
Электродвигатель останавливается. В случае перегрузки работающего электродвигателя тепловые реле 1РТ и 2РТ, нагреватели которых включены в силовую цепь электродвигателя, размыкают свои контакты 1РТК и 2РТК, включенные в цепь управления; контактор пускателя отключается, электродвигатель останавливается. В случае короткого замыкания в электродвигателе мгновенно сгорают плавкие вставки предохранителей, отключая двигатель от сети. Магнитный пускатель отключает также электродвигатель от сети при исчезновении напряжения или понижении его ниже 50—70% номинального (электромагнит контактора при этих условиях не может удержать якорь в притянутом к сердечнику положений). Так же читаются и более сложные развернутые схемы.
Монтажные электрические схемы предназначены для использования при изготовлении отдельных устройств, а также для наладки и эксплуатации электрических установок. Монтажные схемы показывают все электрические соединения между выводами отдельных аппаратов данного устройства, а также марку, сечения, способ прокладки проводов, которыми выполняются соединения.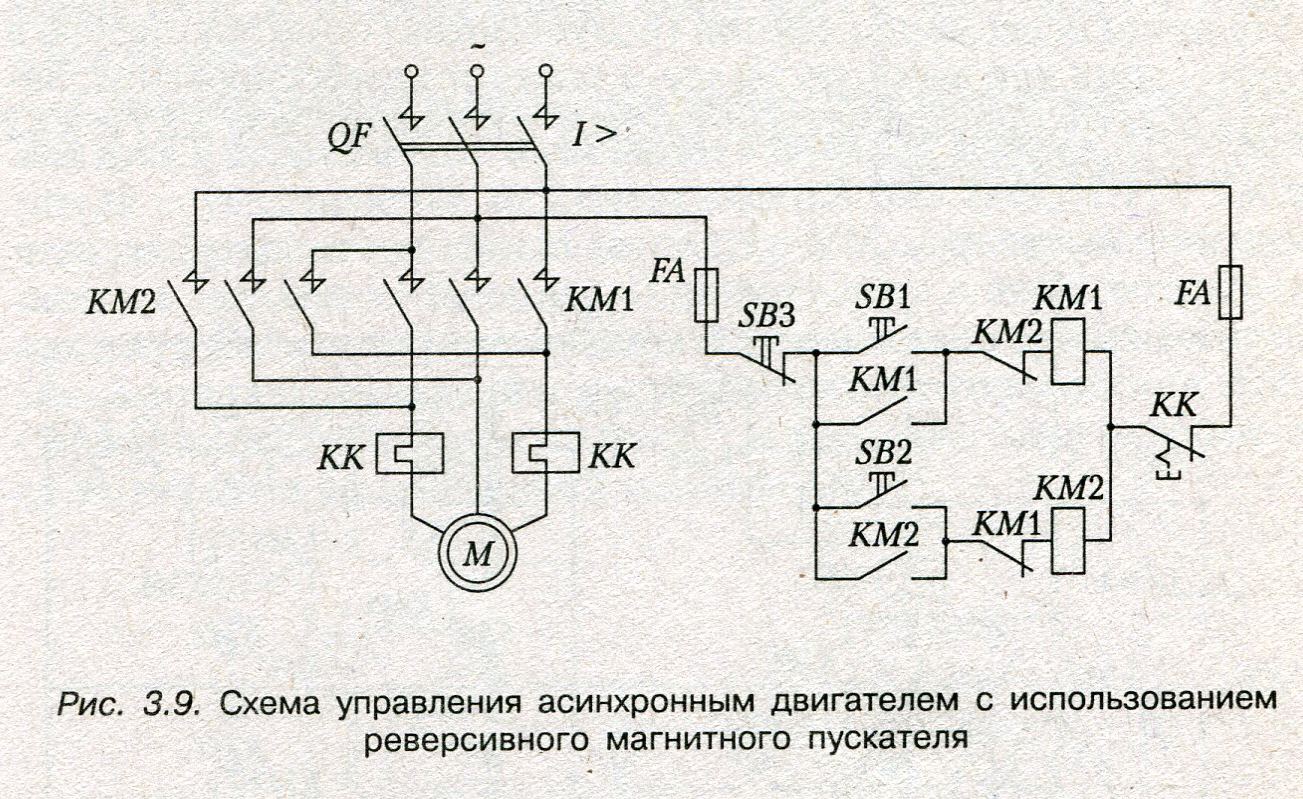 Внутренние соединения аппаратов, составляющих устройство, показываются при необходимости.
Внутренние соединения аппаратов, составляющих устройство, показываются при необходимости.
Основные положения правильного начертания полных принципиальных схем сводятся к следующему:
а) на схеме изображаются рабочие элементы всех аппаратов, входящих в нее;
Таблица 13.2
Некоторые условные обозначения в электрических схемах управления электроприводами
(выдержки из ГОСТ 2725—68, 2727—68, 2728—68, 2730—68, 2732—68)
Наименование | Обозначение по ГОСТу |
1. Катушка индуктивности, дроссель без сердечника | |
2. Дроссель с ферромагнитным сердечником | |
8. Вентиль полупроводниковый | |
4. Сопротивление нерегулируемое | |
5. Сопротивление регулируемое | |
6. Сопротивление, регулируемое без разрыва цепи | |
7. | |
8. Конденсатор регулируемый. Сопротивление емкостное регулируемое | |
9. Обмотка реле, контактора и магнитного пускателя. Общее обозначение |
 Конденсатор нерегулируемый. Сопротивление емкостное нерегулируемое
Конденсатор нерегулируемый. Сопротивление емкостное нерегулируемоеб) отдельные элементы различных аппаратов размещаются не в соответствии с их действительным (территориальным) размещением, а исключительно с точки зрения последовательности действия, наглядности схемы и удобства общей обозреваемости;
в) все элементы одного и того же аппарата обозначаются одинаковыми буквами и цифрами; для отличия разных элементов одного н того же аппарата вводятся различные графические символы;
г) все главные (силовые) цепи вычерчиваются толстыми линиями, а цепи вспомогательные — тонкими;
д) все элементы аппаратов, входящих в схему, изображаются в нормальном положении. Нормальным условно принято считать такое положение, при котором обмотки (катушки) аппаратов не обтекаются током.
В соответствии с этим, участвующие в схеме контакты делятся на замыкающие (з. к.), размыкающие (р. к.) и переключающие (п. к.). При разработке схемы следует учитывать, что при обтекании током обмотки какого-либо аппарата или реле все управляемые ими контакты изменяют свое положение.
В табл. 13.2 приведены основные наиболее часто применяемые условные обозначения элементов аппаратов. В обозначениях контактов условно принято, что при механическом и электрическом воздействии на аппарат (т. е. при переходе аппарата из нормального положения в рабочее) подвижные части контактов движутся сверху вниз или слева направо.
Дальше приводятся примеры схем неавтоматизированного и автоматизированного управления электроприводами строительных машин.
В системах неавтоматизированного электропривода переключения в цепях двигателей осуществляются с помощью аппаратуры ручного управления. Для этой цели используются рубильники, пакетные выключатели, воздушные автоматы, а также контроллеры и другие аппараты.
Продолжение табл. 13.2
При повороте контроллера в направлении «вперед» замыканием контактов К I и К III соединяется провод Л1 с клеммой двигателя С3 и замыканием контактов KV и KVI — провод Л11 с зажимом С1. При повороте контроллера в направлении «назад» замыканием контактов ΚΙ и КН соединяются Л11 и 2С1 и замыканием KIV и KVI соединяются Л31 и С3. Отключение двигателя производится поворотом контроллера в нулевое положение. Двигатель останавливается также при разрыве цепи аварийного выключателя АВ или при наезде на один из конечных выключателей. При снижении напряжения линейный контактор отпадает и также отключается двигатель от сети (нулевая защита). Схема после этого может быть включена в работу лишь предварительным возвращением контроллера в нулевое положение (нулевая блокировка). Защита двигателя и цепей управления осуществлена плавкими предохранителями и максимальным реле.
Управление неавтоматизированным электроприводом с двигателями переменного и постоянного тока небольшой мощности часто ограничивается включением и отключением вручную пускового аппарата; для ограничения пусковых токов двигателей средней и большой мощности применяются реостаты, а для изменения скорости и направления вращения — контроллеры. Из способов управления такими электроприводами наиболее сложным является способ с применением контроллера.
Из способов управления такими электроприводами наиболее сложным является способ с применением контроллера.
Схема управления одиночным двигателем с короткозамкнутым ротором с помощью контроллера НТ-53 приведена на рис. 13.7.
В нулевом положении контроллера при замкнутом рубильнике Р кнопкой КР (пусковая кнопка) производится включение линейного контактора Л (создается вспомогательная цепь 11—12— 1—2—14—21). Затем кнопка КР может быть отпущена, и ток будет протекать по параллельной цепи 12—18—5—4— 2—14 —15—16— 21 или 11—18 —3—4 —2—14—15— 16—21. Если механизм не находится в одном из крайних предельных положений, то возможно движение двигателя в обоих направлениях; если же один из конечных выключателей (КВ или КН) разомкнут, то движение возможно лишь в одном направлении, так как при разомкнутом КВ разрывается цепь 18—5—4, а при разомкнутом КН — цепь 18—3—4.
Рис. 13.7. Схема управления, асинхронным электродвигателем с короткозамкнутым ротором с помощью контроллера НТ-53
Вся защитная аппаратура, а именно: линейный контактор Л, однополюсное максимальное электромагнитное реле РМО, предохраняющее привод от коротких замыканий, кнопка КР, рубильник Р и плавкие предохранители ПР1 и ПР2 — собраны на одной защитной панели.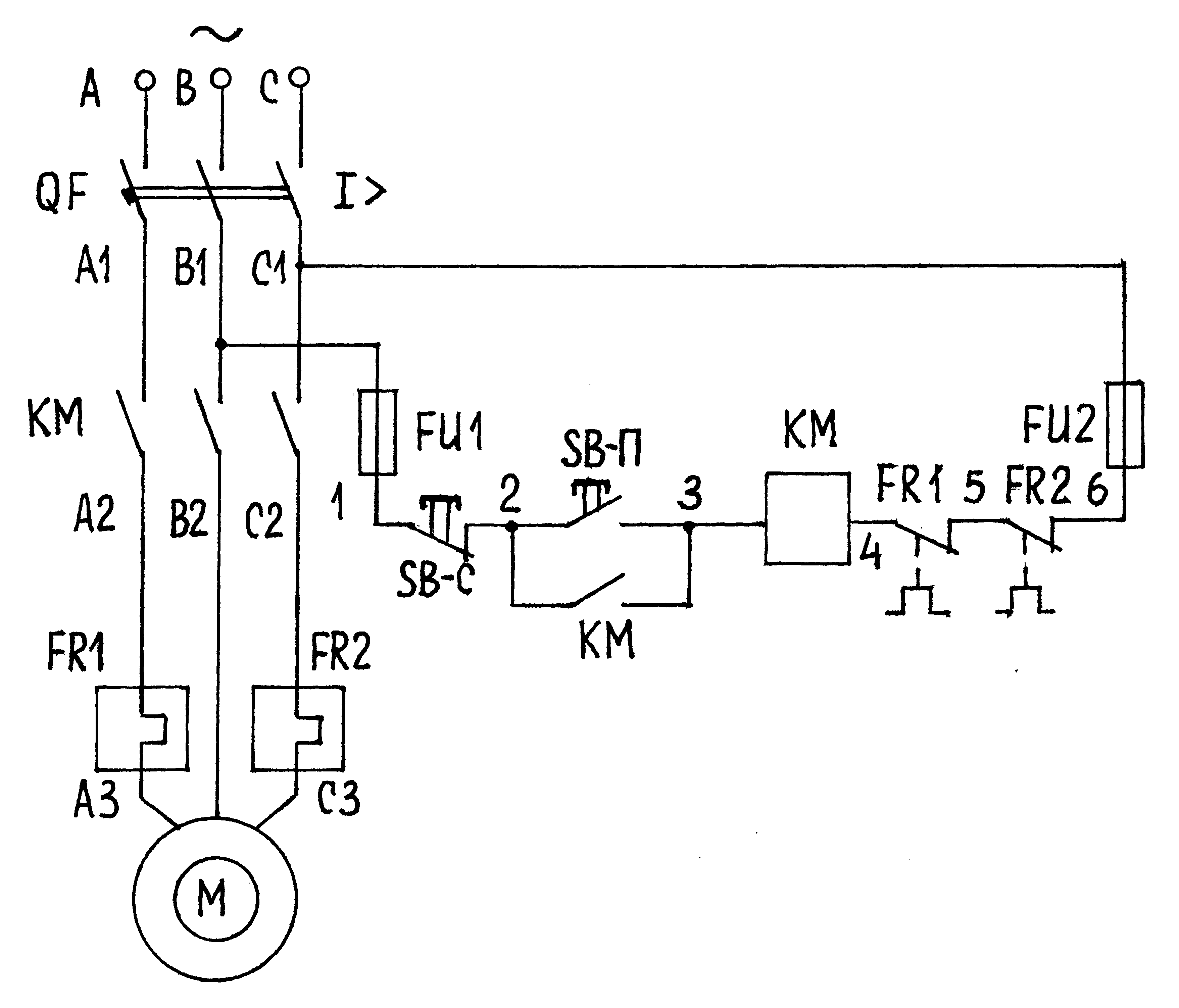 Параллельно двигателю может быть включен тормозной магнит или электрогидравлический толкатель. В некоторых случаях (тихоходные механизмы со скоростью ниже 30 м/мин) тормозные магниты могут отсутствовать.
Параллельно двигателю может быть включен тормозной магнит или электрогидравлический толкатель. В некоторых случаях (тихоходные механизмы со скоростью ниже 30 м/мин) тормозные магниты могут отсутствовать.
В системах автоматического управления электроприводами выполняются весьма разнообразные операции. К основным функциям систем автоматического управления электроприводами можно отнести следующие: пуск электродвигателей в ход, регулирование скорости вращения, реверсирование, торможение и остановка электродвигателей; защита электродвигателей и приводимых ими механизмов от различного рода перегрузок и аварийных режимов; осуществление определенной последовательности операций; сигнализация состояния системы электропривода; автоматическая стабилизация скорости и других параметров электропривода; синхронизация движения отдельных элементов производственных механизмов.
К простейшим схемам автоматического управления электроприводами относятся управление ими с помощью магнитных пускателей.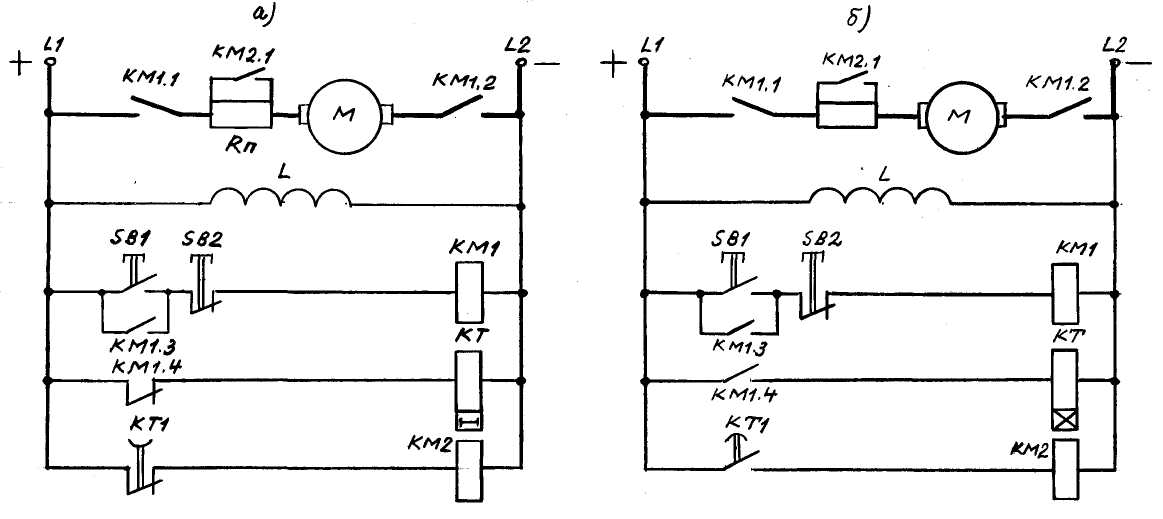 Схема управления асинхронного двигателя с короткозамкнутым ротором с помощью нереверсивного магнитного пускателя приведена на рис. 12.13 и там же приведено описание его действия.
Схема управления асинхронного двигателя с короткозамкнутым ротором с помощью нереверсивного магнитного пускателя приведена на рис. 12.13 и там же приведено описание его действия.
На рис. 12.14 представлена схема управления электродвигателем при помощи реверсивного магнитного пускателя.
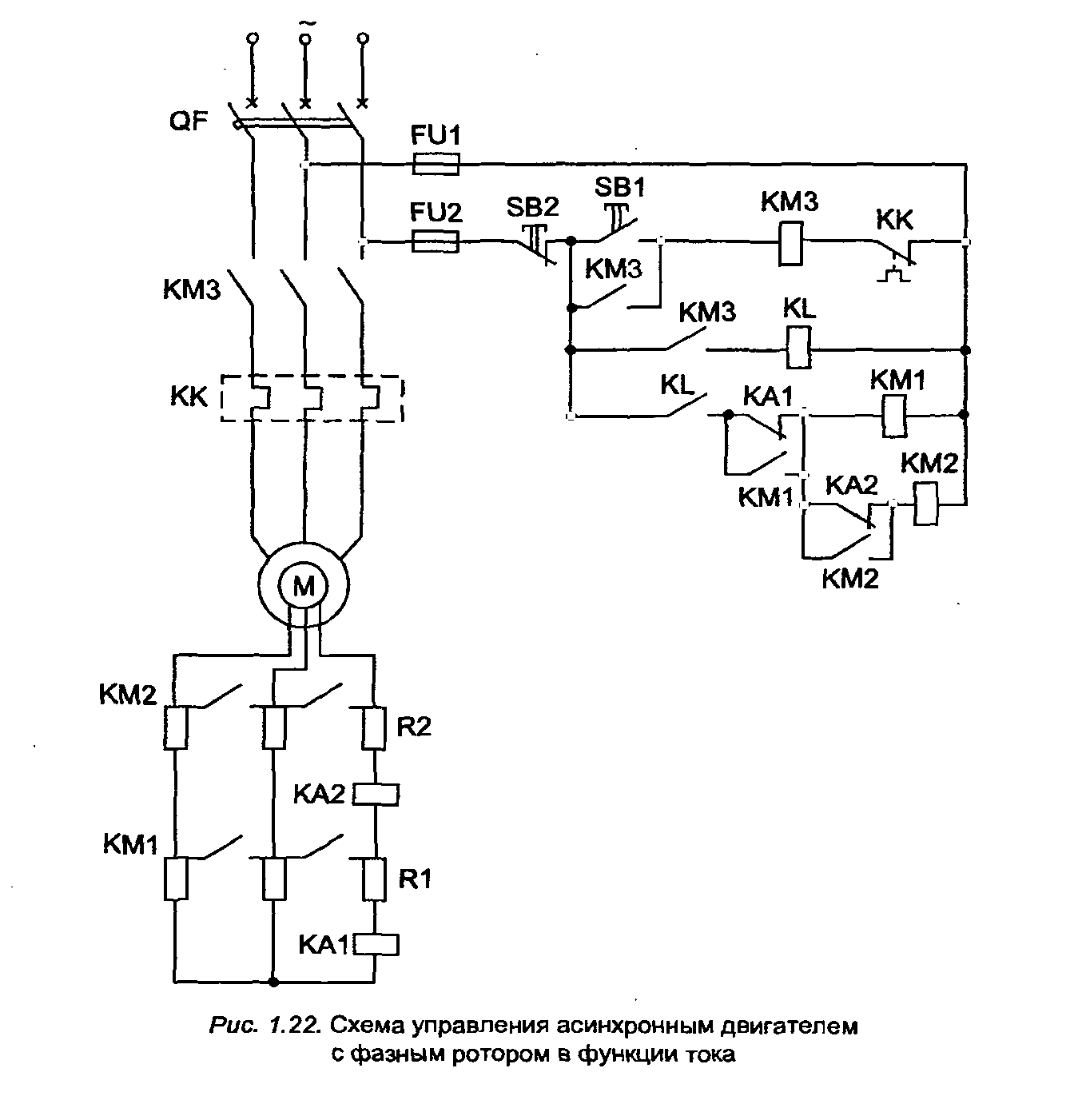
Более сложные схемы автоматизированного электропривода строятся на основе принципов управления электродвигателями; в функциях времени, скорости, тока, пути. Причем в зависимости от принятого принципа выбирают соответствующие схемы и аппараты. Как пример, приводим на рис. 13.8 схему управления электродвигателем с фазным ротором в функции тока. Схемой не предусматривается реверсирования и электрического торможения. Настройка реле ускорения 1РУ, 2РУ и ЗРУ производится таким образом, чтобы токи, при которых соответствующие реле отключаются, удовлетворяли неравенству
Для пуска электродвигателя нажимается кнопка «пуск», вследствие чего включается контактор КЛ, который подает питание на статор электродвигателя, своим замыкающим блок-контактом (з.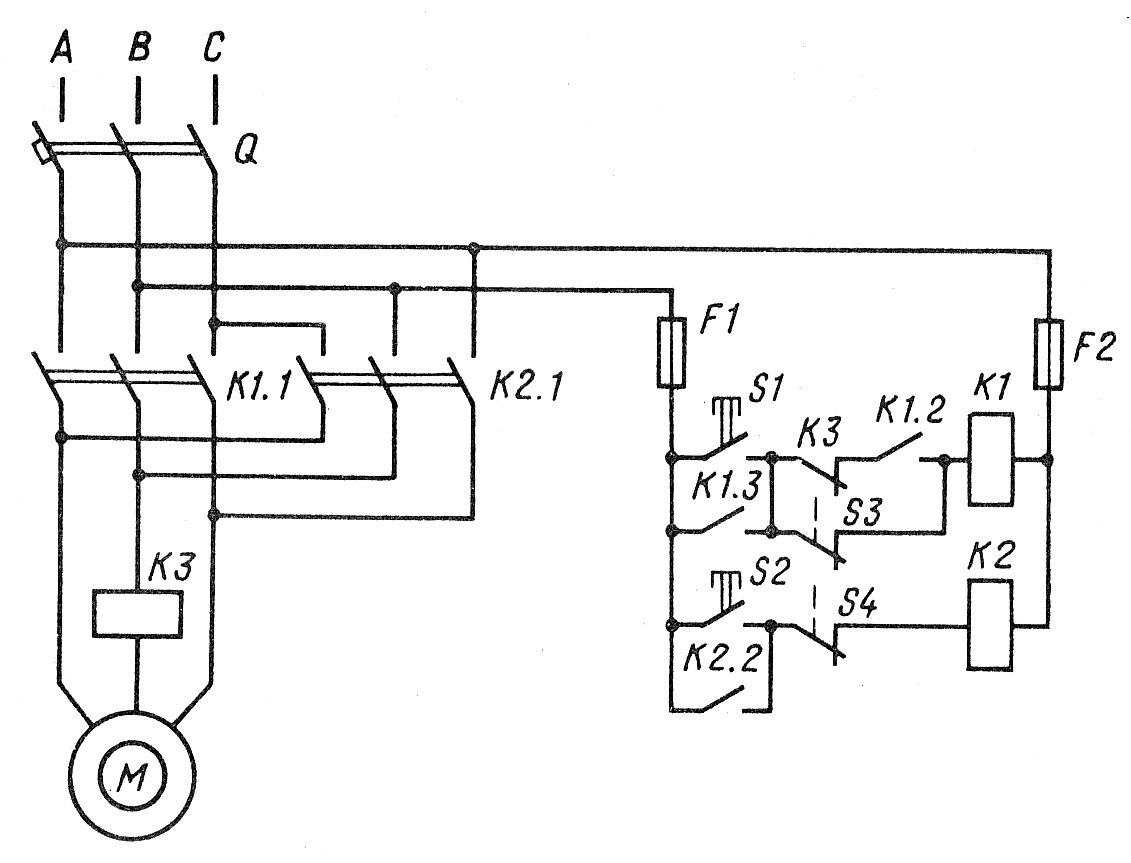 б. к.) КЛ он шунтирует пусковую кнопку.
б. к.) КЛ он шунтирует пусковую кнопку.
Через з. б. к. КЛ получает питание реле РБ, контакты которого, замыкаясь, подсоединяют к сети цепь катушек контакторов ускорения. Однако контакторы ускорения при этом не включаются немедленно, так как размыкающий контакт (р. к.) 1РУ будет открыт до тех пор, пока пусковой ток в роторной цепи не снизится до величины, соответствующей уставке реле 1РУ. После того как контакт 1РУ закроется, сработает контактор ускорения 1У и зашунтирует своими силовыми контактами первую ступень сопротивления в роторной цепи. Аналогично будет работать реле ускорения 2РУ и ЗРУ при меньших уставках тока и соответственно включатся контакторы ускорения 2У и ЗУ, которые выведут вторую и третью ступени сопротивления в роторной цепи, после чего двигатель начнет работать с полной скоростью (естественная характеристика).
тактов реле ускорения, возможной при значениях токов в катушках реле, близких к токам уставок.
Рис. 13.8. Схема управления асинхронным двигателем с контактными кольцами в функции тока
Рис. 13.9. Схема управления асинхронным двигателем с динамическим торможением
13.9. Схема управления асинхронным двигателем с динамическим торможением
В рассматриваемой схеме предусмотрено шунтирование р. к. реле ускорения блок-контактами 1У, 2У, 3У во избежание вибрации, необходимой для того, чтобы ток в роторной цепи достиг значения, при котором реле ускорения открыли бы свои р. к.
На рис. 13.9 приведена схема автоматического управления асинхронным электродвигателем с динамическим торможением.
Динамическое торможение электродвигателя с короткозамкнутым ротором осуществляется включением обмотки статора двигателя в сеть постоянного тока: при этом магнитный поток, создаваемый постоянным током, взаимодействуя с током ротора, создает тормозной момент. Для этого замыкают рубильники (см. схему). Кнопкой «пуск» подается напряжение на катушку контактора КЛ, и электродвигатель включается в сеть; при этом з. б. к. КЛ замыкает цепь питания катушки реле времени РВ, присоединяя ее к сети постоянного тока.
При включении катушки реле РВ з. к. РВ мгновенно замыкаются в цепи катушки К, но включению контактора К препятствуют разомкнутые р. б. к. КЛ.
б. к. КЛ.
Торможение двигателя Д начинается после отключения последнего нажатием кнопки «стоп». При этом: а) катушка КЛ теряет питание и р. к. КЛ замыкается, включая катушку контактора торможения К’, б) катушка реле РВ обесточивается из-за размыкания з. б. к. КЛ и з. к. РВ размыкается с выдержкой времени, по истечении которого происходит автоматическое отключение электродвигателя от сети постоянного тока.
Включению контактора КЛ во время торможения препятствует р. к. К, установленные в цепи питания катушки КЛ.
Сопротивление rт предназначается для ограничения тока намагничивания.
Для торможения электродвигателей в некоторых случаях используется механический колодочный тормоз, управляемый электромагнитом.
Электромагнит получает питание одновременно с двигателем; усилие притяжения якоря преодолевает силу сопротивления пружины тормоза и освобождает колодки, сжимающие шкив двигателя. При отключении электродвигателя катушка электромагнита также обесточивается и тормоз под действием пружины, освобождаемой при опускании якоря, способствует остановке двигателя.
Дистанционное автоматизированное управление сложными электроприводами, в том числе приводами по системе Г-Д (генератор-двигатель, см. § 8.7), применяемыми в механизмах крупных строительных машин, осуществляется с помощью комплектных устройств, называемых станциями управления. Такая станция состоит из отдельных аппаратов управления и защиты: контакторов, автоматов, реле, плавких предохранителей, сопротивлений и др., смонтированных на изоляционных плитах и электрически связанных между собой по той или иной схеме. Станции управления (прежнее название — магнитные станции) поставляются промышленностью в готовом смонтированном виде. Для переключения цепей контакторов станций управления служат или специальные контроллеры облегченного типа, называемые командоконтроллерами, или другие командные аппараты (например, кнопки управления). Комплект из станции управления и командоконтроллера к ней носит название магнитного контроллера.
На рис. 13.10 в качестве примера приведена упрощенная принципиальная схема контакторного управления (регулирования скорости) электропривода по системе Г-Д.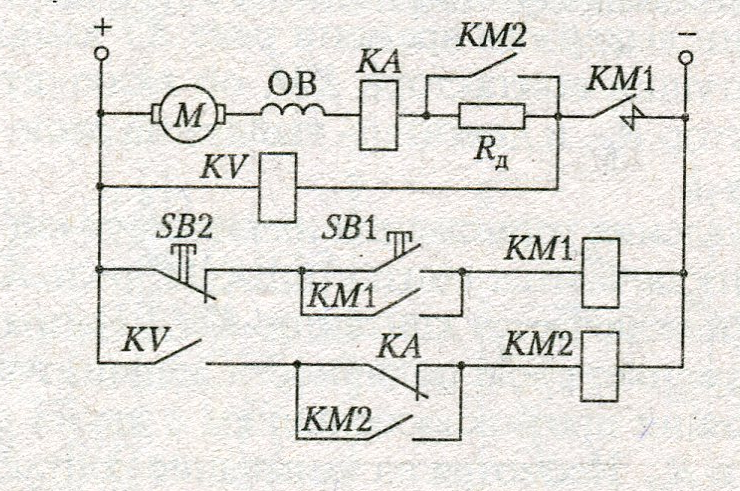 Для увеличения напряжения, подаваемого генератором к двигателю, служат контакты КЗ и К4 в цепи обмотки возбуждения (ОВГ) генератора (при их замыкании напряжение и вместе с ним скорость вращения двигателя увеличиваются). Дополнительное регулирование скорости двигателя может производиться c помощью контактов К1 и К2 в цепи возбуждения его обмотки. Изменение направления вращения двигателя достигается изменением направления напряжения генератора переключением контактов IB, 2В (вперед) и 1Н и 2И (назад).
Для увеличения напряжения, подаваемого генератором к двигателю, служат контакты КЗ и К4 в цепи обмотки возбуждения (ОВГ) генератора (при их замыкании напряжение и вместе с ним скорость вращения двигателя увеличиваются). Дополнительное регулирование скорости двигателя может производиться c помощью контактов К1 и К2 в цепи возбуждения его обмотки. Изменение направления вращения двигателя достигается изменением направления напряжения генератора переключением контактов IB, 2В (вперед) и 1Н и 2И (назад).
Следует отметить, что электропривод по системе ГД c каждым годом все больше вытесняется такой системой привода, где регулируемое в широких пределах напряжение постоянного тока получается не от машинных преобразователей (двигатель-генераторов), а от управляемых выпрямителей (см. § 11.8). Если для этих целей используется Ионный выпрямитель — на тиратронах или управляемый ртутный, —
то электропривод называют ионным; если же применяется полупроводниковый выпрямитель — на управляемых кремниевых вентилях — тиристорах, то привод называют тиристорным.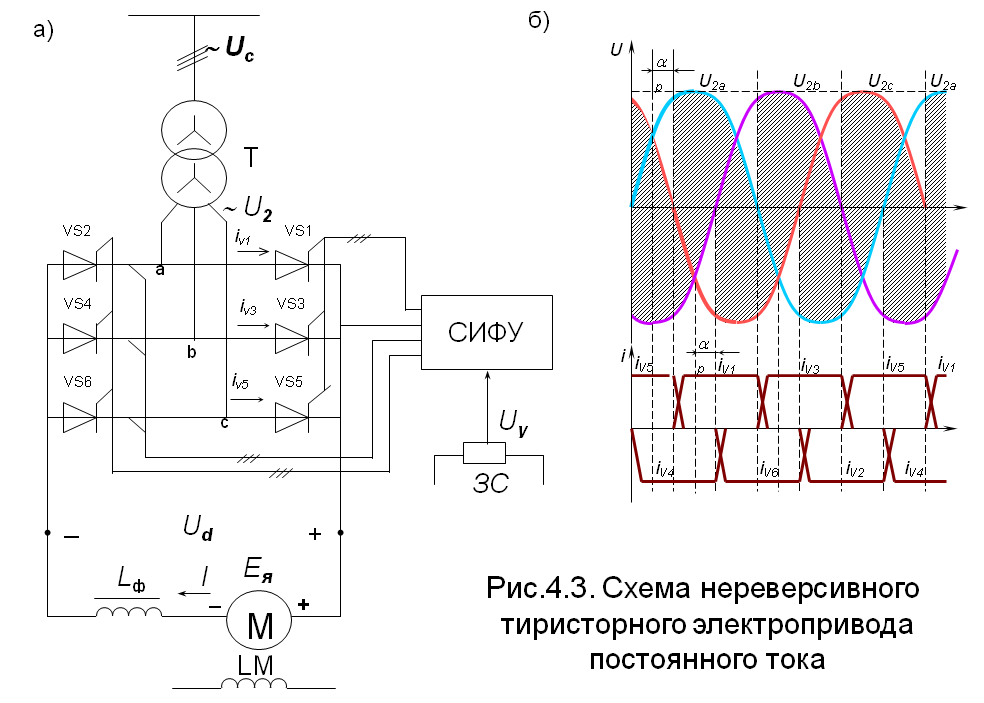
В строительстве в последние годы начали применять тиристорный электропривод для механизмов крупных машин. Такой привод по сравнению с приводом по системе Г-Д имеет меньшие размеры и вес. Кремниевые вентили — тиристоры весьма надежны в эксплуатации и не требуют особого ухода. Недостатком тиристорного привода является пониженный коэффициент мощности (cos φ).
Рис. 13.10. Схема системы Г-Д с контакторным управлением
Рис. 13.11. Упрощенная схема тиристорного электропривода
На рис. 13.11 приведена упрощенная принципиальная схема ти· ристорного электропривода. Тиристорный выпрямитель показан работающим по трехфазной «нулевой» (с нулевым выводом) схеме. Между выпрямителем и электродвигателем включен дроссель (для сглаживания пульсаций выпрямленного напряжения).
Управление напряжением на электродвигателе осуществляется специальным устройством, обозначенным на схеме буквами АУ, которое подает напряжение на управляемый электрод, как это указано в § 9.11.
- Назад
- Вперёд
 gif»> gif»> | |||||||||||||||||||||||||||||||||||||||
|
 Это приводит к увеличению напряжения на резисторах R1-R2 и C1, что приводит к более раннему срабатыванию симистора и соответствующему увеличению скорости.
Это приводит к увеличению напряжения на резисторах R1-R2 и C1, что приводит к более раннему срабатыванию симистора и соответствующему увеличению скорости.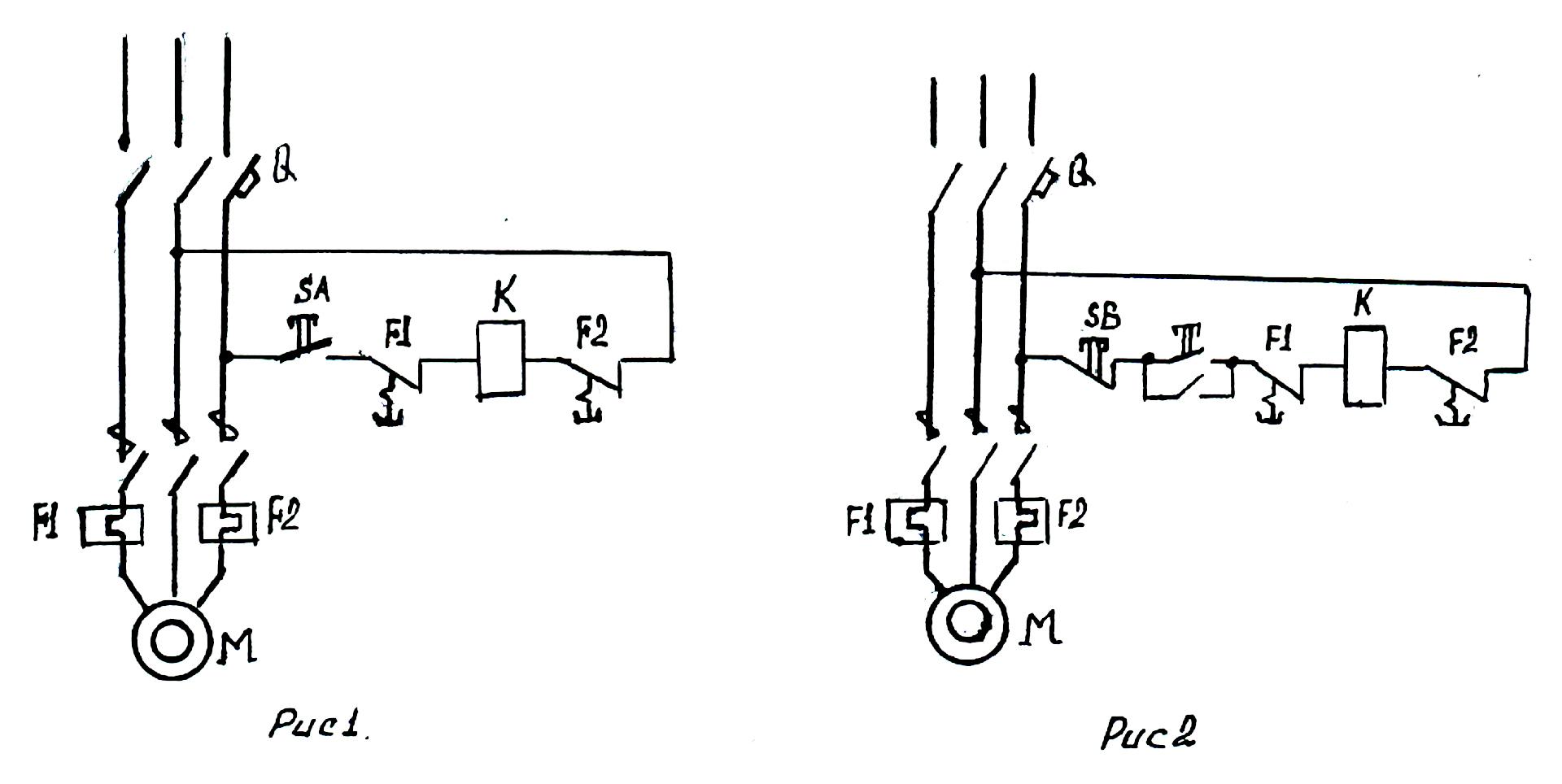 Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания.
Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания.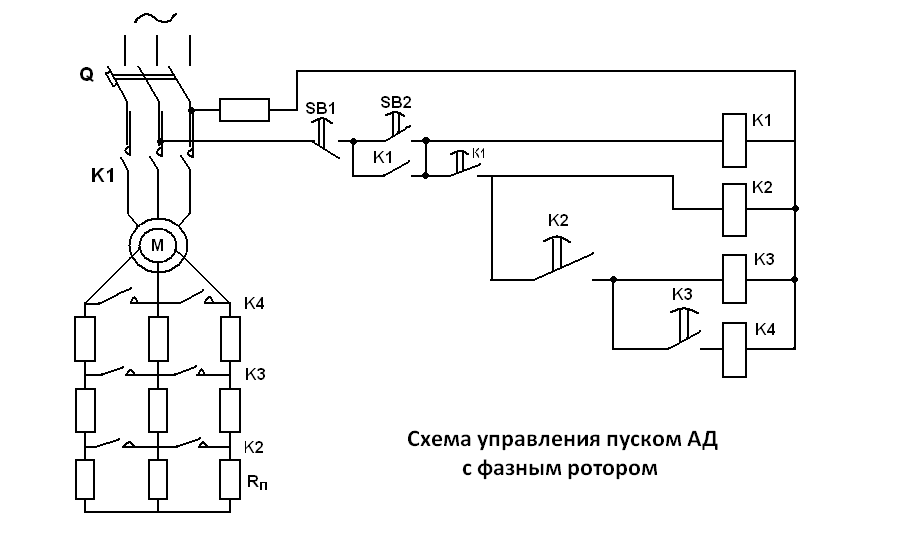 Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, генераторы функций, кристаллы и т. д.
Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, генераторы функций, кристаллы и т. д.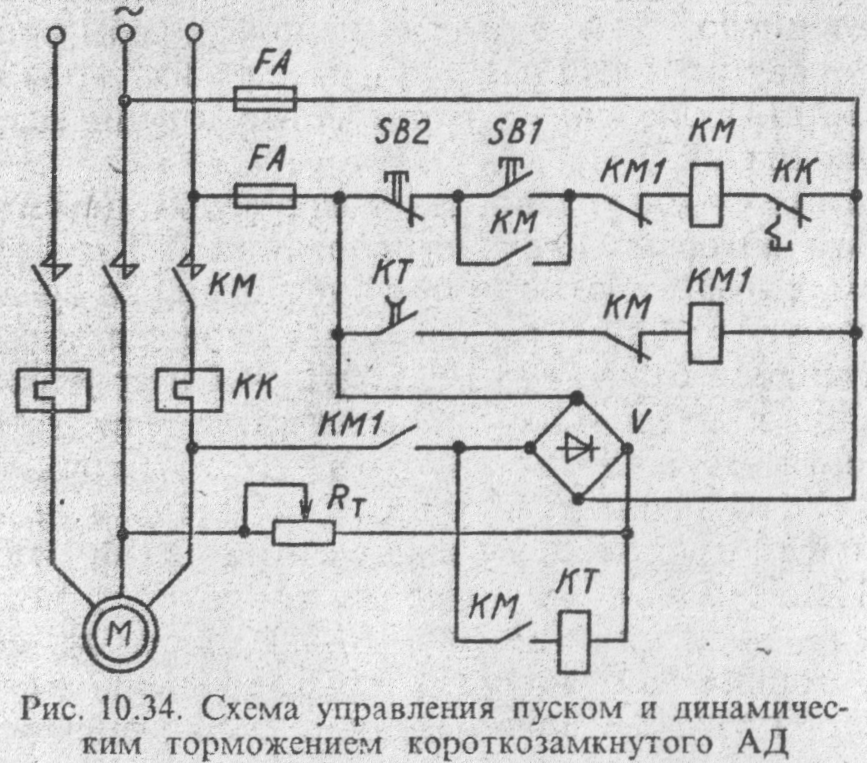 Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка.
Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка. — 20 МОм), тестирует множество различных типов транзисторов, таких как NPN, PNP, FET, MOSFET, тиристоры, SCR, симисторы и многие типы диодов. Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно.
— 20 МОм), тестирует множество различных типов транзисторов, таких как NPN, PNP, FET, MOSFET, тиристоры, SCR, симисторы и многие типы диодов. Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно.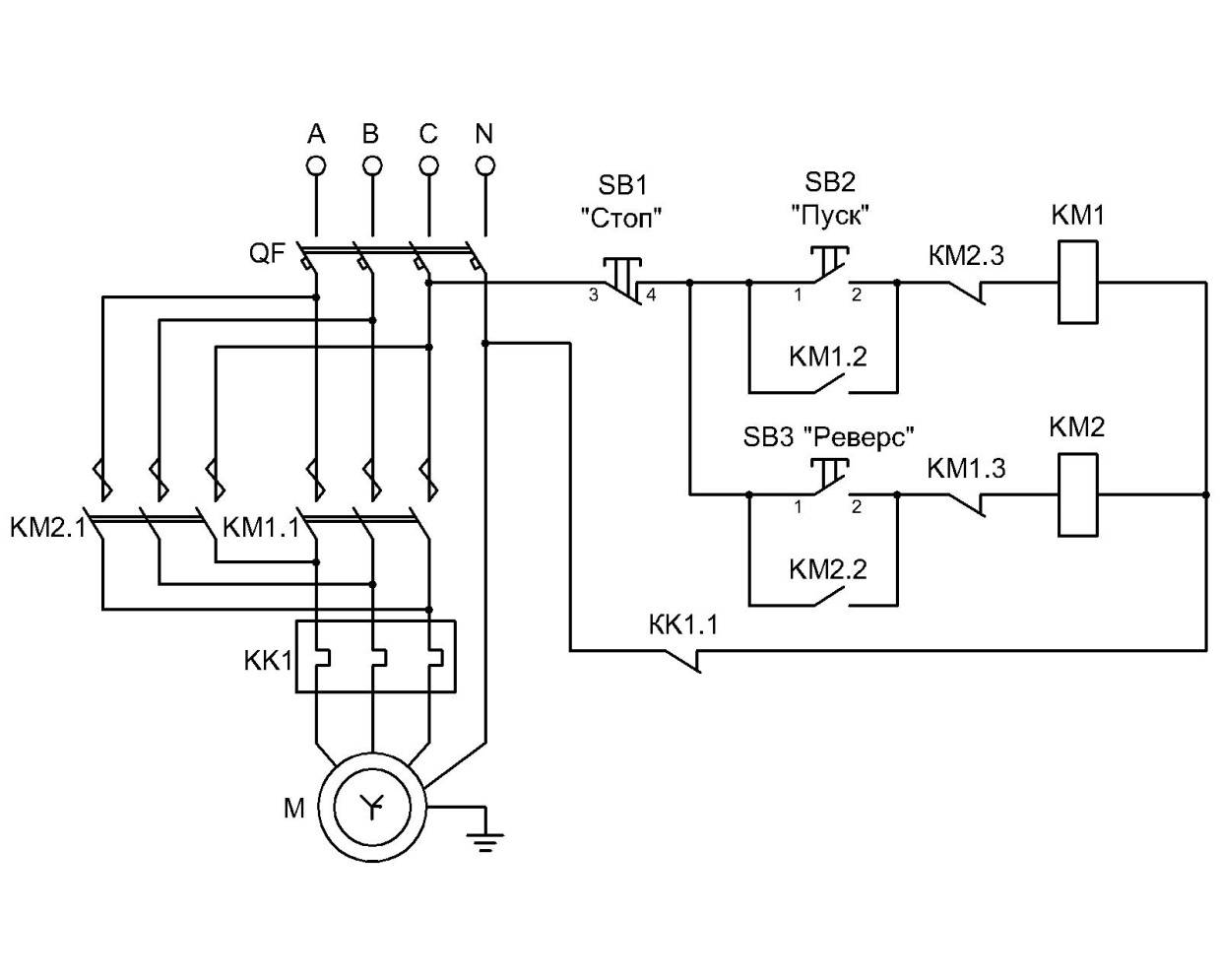 8-DIP обработанный разъем IC позволяет заменять OPA2134 многими другими микросхемами с двумя операционными усилителями, такими как OPA2132, OPA2227, OPA2228, двойной OPA132, OPA627 и т. Д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, и благодаря низкому энергопотреблению может питаться от одного 9батарея В.
8-DIP обработанный разъем IC позволяет заменять OPA2134 многими другими микросхемами с двумя операционными усилителями, такими как OPA2132, OPA2227, OPA2228, двойной OPA132, OPA627 и т. Д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, и благодаря низкому энергопотреблению может питаться от одного 9батарея В.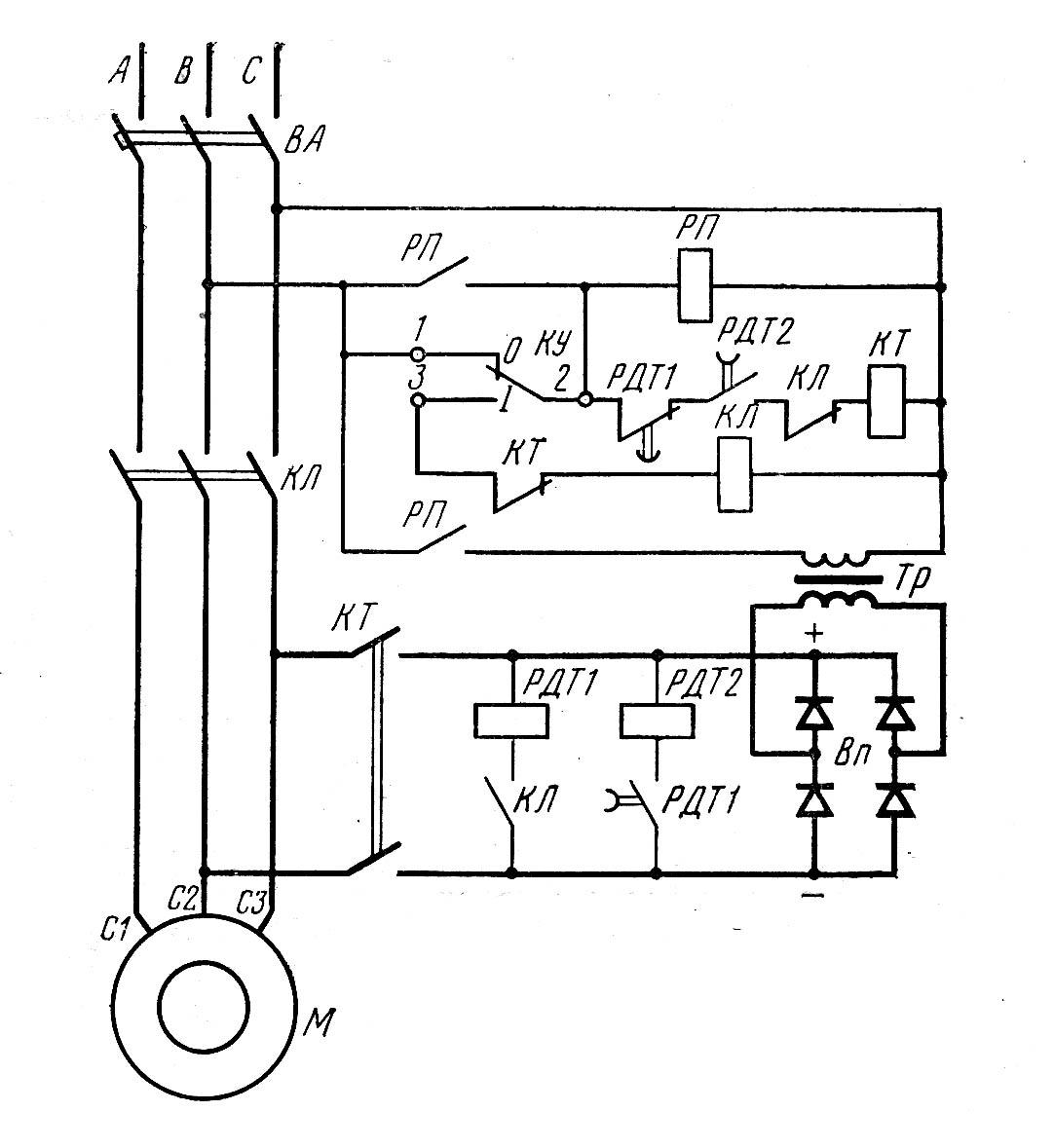 Arduino Prototype использует все стандартные сквозные компоненты для простоты конструкции, два из которых скрыты под разъемом IC. На плате имеется 28-контактный разъем DIP IC, заменяемый пользователем микроконтроллер ATmega328, прошитый загрузчиком Arduino, кварцевый резонатор 16 МГц и переключатель сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых можно использовать как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.
Arduino Prototype использует все стандартные сквозные компоненты для простоты конструкции, два из которых скрыты под разъемом IC. На плате имеется 28-контактный разъем DIP IC, заменяемый пользователем микроконтроллер ATmega328, прошитый загрузчиком Arduino, кварцевый резонатор 16 МГц и переключатель сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых можно использовать как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.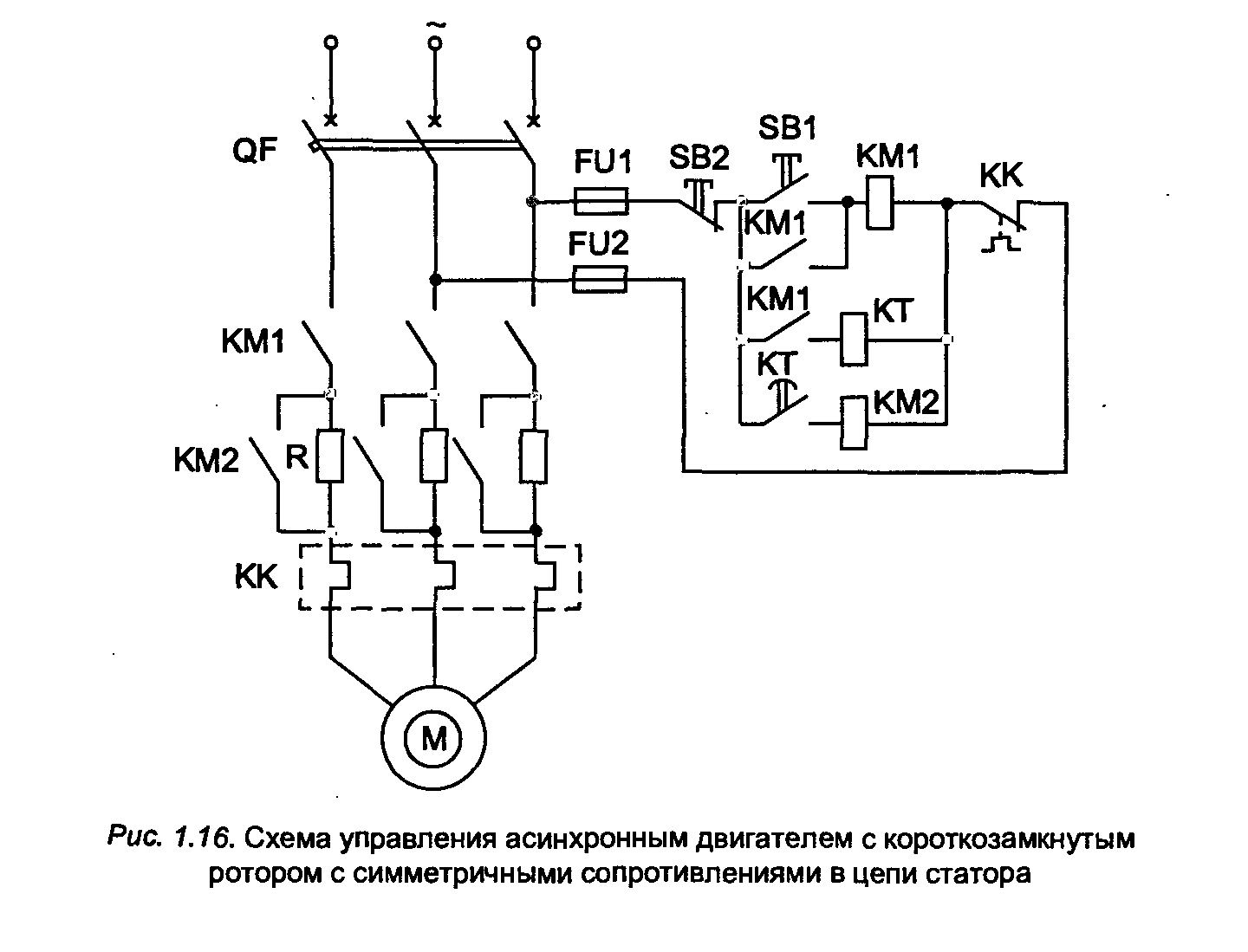 Радиочастотный пульт дистанционного управления обеспечивает большой радиус действия до 200 м / 650 футов и может найти множество применений для управления различными устройствами, и он работает даже через стены. Вы можете управлять освещением, вентиляторами, системой кондиционирования, компьютером, принтером, усилителем, роботами, гаражными воротами, системами безопасности, моторизованными шторами, моторизованными оконными жалюзи, дверными замками, разбрызгивателями, моторизованными проекционными экранами и всем остальным, о чем вы только можете подумать.
Радиочастотный пульт дистанционного управления обеспечивает большой радиус действия до 200 м / 650 футов и может найти множество применений для управления различными устройствами, и он работает даже через стены. Вы можете управлять освещением, вентиляторами, системой кондиционирования, компьютером, принтером, усилителем, роботами, гаражными воротами, системами безопасности, моторизованными шторами, моторизованными оконными жалюзи, дверными замками, разбрызгивателями, моторизованными проекционными экранами и всем остальным, о чем вы только можете подумать.Стандартные цепи управления двигателем — журнал IAEI
Однофазные и трехфазные асинхронные двигатели переменного тока с короткозамкнутым ротором нуждаются в цепи определенного типа для инициирования функции пуска или останова.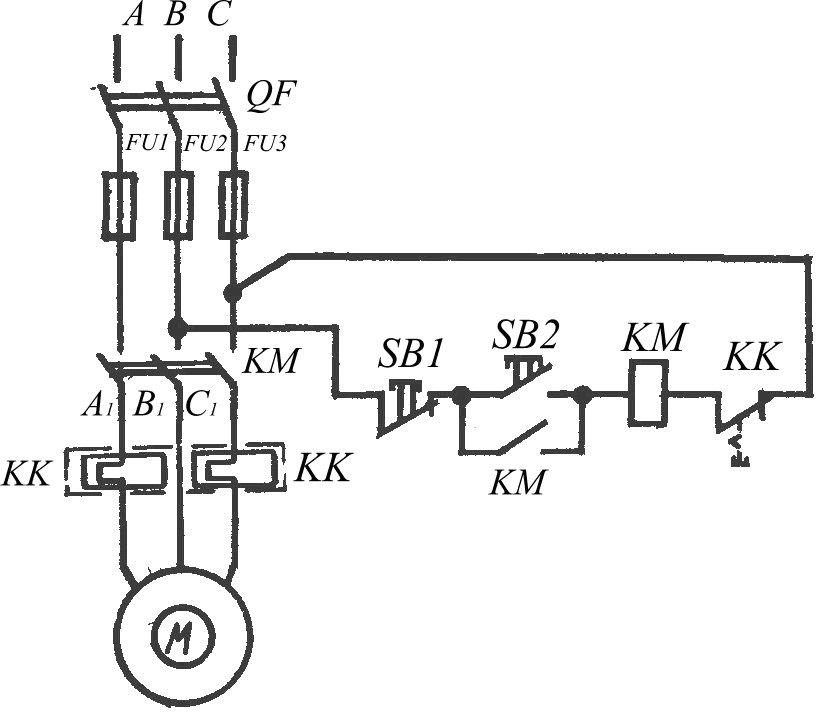 Обычно однофазные двигатели и трехфазные двигатели меньшей мощности могут запускаться при полном напряжении в сети. Однако трехфазные двигатели большей мощности требуют методов запуска с пониженным напряжением.
Обычно однофазные двигатели и трехфазные двигатели меньшей мощности могут запускаться при полном напряжении в сети. Однако трехфазные двигатели большей мощности требуют методов запуска с пониженным напряжением.
Цепи питания и цепи управления
Обычно в управлении двигателем используются два типа цепей — силовая цепь линейного напряжения и цепь управления . Силовая цепь при прямом пуске на полном напряжении состоит из устройства защиты от перегрузки по току (OCPD), будь то плавкие предохранители или автоматический выключатель; линейные проводники, которые заканчиваются на клеммах L1, L2 и L3; магнитный пускатель двигателя или полупроводниковое устройство; и проводники нагрузки, которые заканчиваются на клеммах T1, T2 и T3.
Цепь управления состоит из компонентов лестничной схемы, таких как кнопки пуска и останова, катушки реле, сигнальные лампы и любые другие устройства замыкания контактов, такие как концевые выключатели, реле давления, регуляторы температуры, датчики приближения, или поплавковые выключатели. Цепь управления может быть дополнительно классифицирована как двухпроводная или трехпроводная в зависимости от применения. Также важно отметить, что мощность силовой цепи рассчитана в соответствии с номинальным напряжением нагрузки двигателя: 115 В, 200 В, 230 В, 460 В или 575 В. Цепь управления может работать при том же напряжении, что и силовая цепь, но может работать и при более низком напряжении за счет использования станочного трансформатора для понижения напряжения до более безопасного уровня.
Цепь управления может быть дополнительно классифицирована как двухпроводная или трехпроводная в зависимости от применения. Также важно отметить, что мощность силовой цепи рассчитана в соответствии с номинальным напряжением нагрузки двигателя: 115 В, 200 В, 230 В, 460 В или 575 В. Цепь управления может работать при том же напряжении, что и силовая цепь, но может работать и при более низком напряжении за счет использования станочного трансформатора для понижения напряжения до более безопасного уровня.
Схема типичной пусковой цепи с полным напряжением от сети показана на рис. 1. На этой схеме показаны силовая цепь и цепь управления . Обратите внимание, что схема управления представляет собой схему управления с трехпроводной лестничной схемой, которая хорошо работает для трехфазных двигателей меньшей мощности. Электроэнергетическая компания будет иметь правила относительно того, насколько большой двигатель может быть запущен через линию. Как только мощность двигателя превышает это значение, необходимо использовать методы запуска при пониженном напряжении. Двигатели являются индуктивными нагрузками; поэтому они имеют очень высокие пусковые токи в диапазоне от 2,5 до 10 раз больше рабочего тока двигателя при полной нагрузке. Этот чрезмерный пусковой ток, также называемый током заторможенного ротора, вызывает колебания напряжения на линиях. Вы, вероятно, наблюдали эффект пускового тока всякий раз, когда свет в здании гаснет, когда оборудование HVAC подключается к сети. Когда этот чрезмерный пусковой ток потребляется от источника напряжения в течение нескольких секунд, это вызывает падение напряжения. Это падение напряжения означает, что для оборудования доступно более низкое напряжение; и осветительные приборы, в частности, будут мерцать.
Двигатели являются индуктивными нагрузками; поэтому они имеют очень высокие пусковые токи в диапазоне от 2,5 до 10 раз больше рабочего тока двигателя при полной нагрузке. Этот чрезмерный пусковой ток, также называемый током заторможенного ротора, вызывает колебания напряжения на линиях. Вы, вероятно, наблюдали эффект пускового тока всякий раз, когда свет в здании гаснет, когда оборудование HVAC подключается к сети. Когда этот чрезмерный пусковой ток потребляется от источника напряжения в течение нескольких секунд, это вызывает падение напряжения. Это падение напряжения означает, что для оборудования доступно более низкое напряжение; и осветительные приборы, в частности, будут мерцать.
Рис. 1. Трехпроводное управление при полном напряжении
Пускатели пониженного напряжения
В основном существует шесть типов пускателей пониженного напряжения: первичный резистор, реактор, автотрансформатор, частичная обмотка, звезда-треугольник и полупроводниковые. Твердотельные пускатели пониженного напряжения очень распространены, поскольку они хорошо взаимодействуют с частотно-регулируемыми приводами (ЧРП) и программируемыми логическими контроллерами (ПЛК).
Пускатели с первичным резистором используют резисторы, включенные последовательно с выводами двигателя во время функции пуска. Поскольку теперь это последовательная цепь, прикладываемое напряжение падает между последовательным резистором и обмоткой двигателя, вызывая более низкий пусковой ток. Реле времени управляет реле управления, контакты которого закорачивают последовательные резисторы после запуска.
Пускатели реакторов работают так же, за исключением того, что вместо резисторов используются реакторы. Пускатели реакторов встречаются гораздо реже, чем в прошлом.
Автотрансформаторные пускатели используют автотрансформаторы с ответвлениями, отводы которых обычно устанавливаются на 50%, 65% от 80% доступного сетевого напряжения. Опираясь на концепцию «коэффициента витков» в трансформаторе, этот тип пускателя допускает меньшие токи на стороне сети с точки зрения электроснабжения и большие токи на стороне нагрузки с точки зрения двигателя во время запуска. Автотрансформатор отличается от двухобмоточного трансформатора тем, что не обеспечивает гальваническую развязку между первичной и вторичной обмотками. Повышающий автотрансформатор часто называют «повышающим» автотрансформатором, а понижающий автотрансформатор — «понижающим».
Автотрансформатор отличается от двухобмоточного трансформатора тем, что не обеспечивает гальваническую развязку между первичной и вторичной обмотками. Повышающий автотрансформатор часто называют «повышающим» автотрансформатором, а понижающий автотрансформатор — «понижающим».
Помните коэффициент трансформации трансформатора? При рассмотрении напряжения вы полагаетесь на следующую формулу:
В первичный / В вторичный = N первичный / N вторичный
Для тока вы полагаетесь на эту формулу:
I 9029 3 первичных / I вторичное = N вторичное / N первичное
Возьмем простой пример для иллюстрации. Трансформатор мощностью 1 кВА имеет первичную обмотку 240 В и вторичную обмотку 120 В. Первичный ток составляет 4,17 А при 240 В, а вторичный ток — 8,33 А при 120 В. Трансформатор имеет коэффициент трансформации 2:1. Напряжение уменьшается в два раза, а ток увеличивается в два раза. Этот принцип позволяет работать пускателю автотрансформаторного типа.
Этот принцип позволяет работать пускателю автотрансформаторного типа.
Пускатель с частичной обмоткой предназначен для работы с двигателем с частичной обмоткой, который имеет два набора одинаковых обмоток. Вы можете использовать двигатели с двойным напряжением 230/460 В, но вы должны соблюдать крайнюю осторожность. Концепция заключается в том, что двигатель 230/460 В работает при напряжении 230 В с параллельными обмотками. Следовательно, при пуске в цепи находится половина обмоток двигателя; затем через несколько секунд в цепь включается другая половина обмоток двигателя. Серьезные проблемы могут возникнуть, если схема синхронизации не подключит другую половину обмоток двигателя сразу после запуска.
Пускатель «звезда-треугольник» работает, позволяя запускать двигатель в конфигурации «звезда», а затем работать в конфигурации «треугольник». Использование этой конфигурации позволяет снизить пусковой ток во время запуска, сохраняя при этом пусковой момент примерно на 33%. Открытый переход является важным соображением, которое следует учитывать при использовании пускателей по схеме «звезда-треугольник», поскольку между конфигурацией «звезда» для пуска и конфигурацией «треугольник» для работы будет период времени, когда обмотки двигателя будут отключены. Пускатели с закрытым переходом устраняют этот недостаток, но стоят гораздо дороже.
Открытый переход является важным соображением, которое следует учитывать при использовании пускателей по схеме «звезда-треугольник», поскольку между конфигурацией «звезда» для пуска и конфигурацией «треугольник» для работы будет период времени, когда обмотки двигателя будут отключены. Пускатели с закрытым переходом устраняют этот недостаток, но стоят гораздо дороже.
Твердотельные пускатели часто называют пускателями с «плавным пуском», поскольку для выполнения этой задачи в них используются кремниевые выпрямители (SCR). Газонаполненные вакуумные лампы, называемые тиратронами, были ранней версией семейства твердотельных тиристоров, которое включает в себя SCR Triacs, Diacs и UJT (однопереходные транзисторы). SCR состоит из трех элементов, называемых анодом, катодом и затвором. Подавая сигнал на элемент затвора точно в нужное время, вы можете контролировать, какой ток SCR будет либо пропускать, либо блокировать в течение цикла; это известно как фазовый контроль. Способность этого устройства обеспечивать либо частичную, либо полную проводимость во время цикла обеспечивает большую гибкость для проектировщика. Эта возможность позволяет точно контролировать ток нагрузки двигателя во время запуска.
Эта возможность позволяет точно контролировать ток нагрузки двигателя во время запуска.
Цепи управления лестничными звеньями
Обычно используются два типа цепей управления лестничными звеньями: двухпроводная и трехпроводная цепи управления. Двухпроводная схема управления использует устройства с постоянным контактом для управления магнитным пускателем двигателя. В трехпроводной схеме управления используются устройства мгновенного действия, управляющие магнитным пускателем двигателя.
Двухпроводная схема управления показана на рис. 2. Она состоит из нормально разомкнутого контактного устройства, которое при замыкании подает питание на катушку магнитного пускателя двигателя, который, в свою очередь, подает питание на подключенную двигательную нагрузку. Двухпроводная схема управления обеспечивает так называемый «расцепитель низкого напряжения». В случае сбоя питания магнитный пускатель двигателя отключится. Как только питание будет восстановлено, магнитный пускатель двигателя автоматически снова подаст питание, при условии, что ни одно из поддерживаемых контактных устройств не изменило своего состояния. Это может быть очень выгодно в таких приложениях, как охлаждение или кондиционирование воздуха, где вам не нужно, чтобы кто-то перезапускал оборудование после сбоя питания. Однако это может быть чрезвычайно опасно в приложениях, где оборудование запускается автоматически, подвергая оператора опасности.
Это может быть очень выгодно в таких приложениях, как охлаждение или кондиционирование воздуха, где вам не нужно, чтобы кто-то перезапускал оборудование после сбоя питания. Однако это может быть чрезвычайно опасно в приложениях, где оборудование запускается автоматически, подвергая оператора опасности.
Рисунок 2. Двухпроводное управление полным напряжением
Трехпроводная схема управления показана на рисунке 1. Она состоит из нормально замкнутой кнопки останова (СТОП), нормально разомкнутой кнопки пуска (СТАРТ), пломбировочного контакта ( м), и катушка магнитного пускателя двигателя. При нажатии нормально разомкнутой кнопки пуска на катушку магнитного пускателя двигателя (М) подается напряжение. Вспомогательный контакт (M) герметизирует кнопку пуска, обеспечивая замыкание цепи. Нажатие нормально замкнутой кнопки остановки прерывает цепь. Трехпроводная схема управления обеспечивает так называемую «защиту от низкого напряжения». В случае сбоя питания магнитный пускатель двигателя отключится.