
Двигатель постоянного тока: схемы включения
Электродвигатели, работающие на постоянном токе, используются не так часто, как двигатели переменного тока. Ниже приведем их достоинства и недостатки.
| Достоинства | Недостатки |
| частота вращения легко регулируется | высокая стоимость |
| мягкий пуск и плавный разгон | сложность конструкции |
| получение частоты вращения выше 3000 об/мин | сложность в эксплуатации |
В быту двигатели постоянного тока нашли применение в детских игрушках, так как источниками для их питания служат батарейки. Используются они на транспорте: в метрополитене, трамваях и троллейбусах, автомобилях. На промышленных предприятиях электродвигатели постоянного тока применяются в приводах агрегатов, для бесперебойного электроснабжения которых используются аккумуляторные батареи.
Содержание
- Конструкция и обслуживание двигателя постоянного тока
- Схемы включения двигателя постоянного тока
- Независимое возбуждение
- Параллельное возбуждение
- Последовательное возбуждение
- Смешанное возбуждение
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь, подключающийся к источнику питания через щеточный аппарат. Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения). Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя. С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
Схема двигателя постоянного токаЩеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием. В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Схемы включения двигателя постоянного тока
Наличие обмоток возбуждения – отличительная особенность машин постоянного тока. От способов их подключения к сети зависят электрические и механические свойства электродвигателя.
Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику.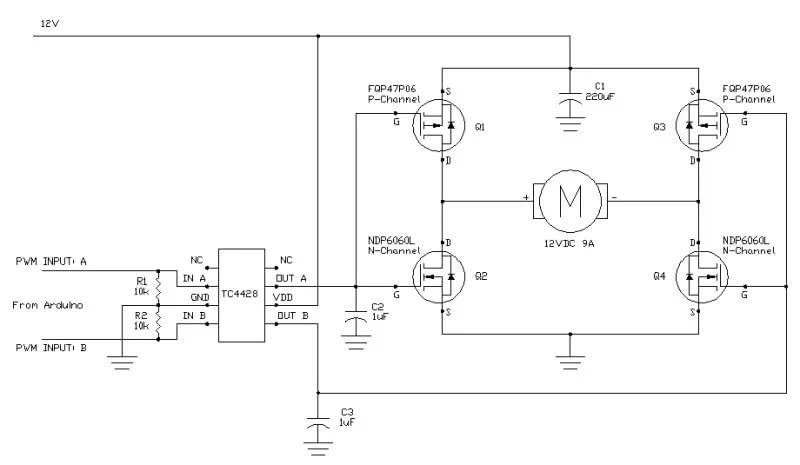 Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбужденияСмешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбужденияДля изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений.
Оцените качество статьи:
1.6. Пример изучения работы схемы управления электродвигателем постоянного тока независимого возбуждения
при | номинальном | магнитном потоке из–за ухудшения условий |
коммутации, то токи втягивания IВТ и отпадания IОТП реле KA, меньше | ||
токов | переключения | I1 и I2 при пуске с номинальным магнитным |
потоком (рис. 1.14.б). | ||
Рис. 1.14. Схема управления пуском в функции тока ослаблением магнитного потока (а) и переходные процессы (б)
Срабатывание реле KA приводит к включению резистора Rдоб в цепь обмотки возбуждения, увеличению магнитного потока (ЭДС двигателя) и снижению тока якоря. При снижении тока якоря до величины тока отпадания реле KA, реле отключается, что приводит к шунтированию Rдоб, уменьшению тока возбуждения (магнитного потока), дальнейшему росту скорости двигателя и увеличению тока якоря.
Принципиальная электрическая схема управления электродвигателем постоянного тока независимого возбуждения представлена на рис.1.15. Схема силовой цепи обеспечивает реверсивный режим работы двигателя (контакты контакторов
38
направления «Вперед» KMВ и «Назад» KMН), пуск в две ступени в функции времени (реле времени KT1 и KT2, контакторы ускорения KM1
иKM2) и режим торможения противовключением в функции скорости (реле противовключения для направления «Вперед» KVВ и «Назад» KVН
иконтактор противовключения KMП).
Рис. 1.15. Схема управления пуском двигателя в две ступени с торможением противовключением
В исходном нулевом положении рукоятки командоаппарата SA в цепи управления ток протекает через катушки реле времени KT1 и KT2, через размыкающие контакты контакторов KMП и KM1, которые замкнуты, т.к. в катушках этих контакторов ток не протекает. Поэтому контакты KT1 и KT2 разомкнуты, предотвращая включение контакторов KM1 и KM2 и обеспечивая включение пусковых резисторов R1 и R2 в якорной цепи.
При переводе рукоятки командоаппарата в положение В («Вперед») замыкается верхний контакт SA и получает питание катушка контактора KMВ, контактор срабатывает и подключает к якорю двигателя напряжение силовой цепи и подключает катушку реле противовключения KVВ. Напряжение на катушке KVВ при неподвижном
39
двигателе достаточно для его срабатывания (рис.1.10 т. a) и реле втягивается, его контакт в цепи катушки контактора противовключения замыкается и контактор KMП срабатывает, шунтируя резистор противовключения Rпв в якорной цепи двигателя.
Для осуществления реверса двигателя рукоятку командоаппарата SA переводят в положение Н («Назад»). В результате чего верхний контакт SA размыкается, отключая катушку KMВ, поэтому двигатель отключается от сети, отключается реле KVВ, которое отключает контактор противовключения KMП, размыкающий контакт KMП замыкается и запитывает катушку реле времени KT1, которое размыкает свой контакт и снимает напряжение с катушек KM1 и KM2, размыкающий контакт KM1 подает питание на катушку реле времени KT2, которое срабатывает и размыкает свой контакт в цепи катушки контактора KM2.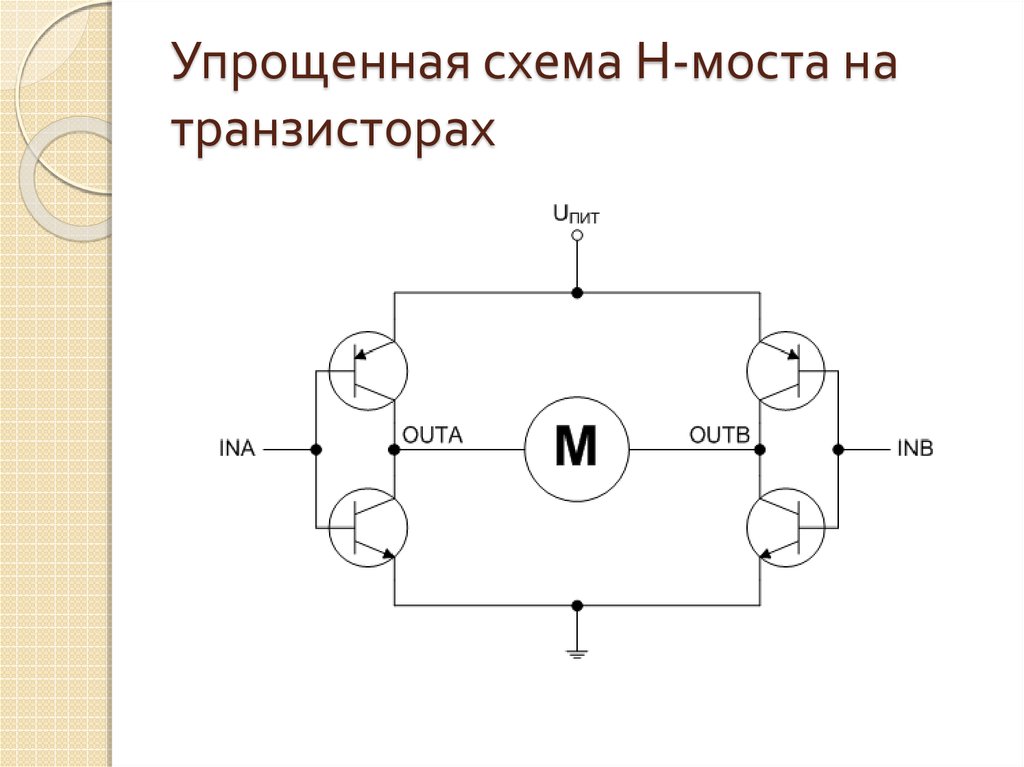
40
Нормальная эксплуатация электроустановок и электрооборудования возможна при правильной организации их защиты в аварийных режимах.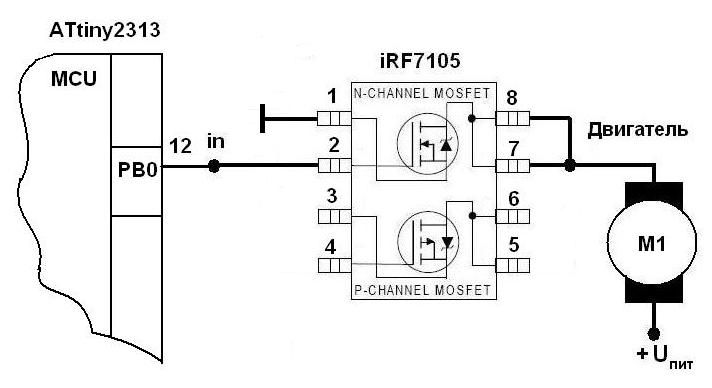
В электроприводах постоянного и переменного тока применяют следующие основные виды защит:
Максимально – токовая защита обеспечивает немедленное отключение силовой цепи при возникновении недопустимо больших токов (при коротких замыканиях).
В силовых цепях эта защита осуществляется (рис.1.16 – 1.18):
-плавкими предохранителями;
-автоматическими выключателями;
-максимально – токовыми реле
Рис. 1.16. Максимально – токовая защита плавкими предохранителями FU двигателей переменного (а) и постоянного (б)
1.16. Максимально – токовая защита плавкими предохранителями FU двигателей переменного (а) и постоянного (б)
тока
41
Рис.1.17. Максимально – токовая защита двигателей переменного (а) и постоянного (б) тока автоматами QF
Ток плавкой вставки в предохранителях и ток уставки автомата или максимально – токового реле выбирают для асинхронных короткозамкнутых двигателей из следующих условий:
-при нормальном пуске (время пуска менее 5 с) Iвсн ≥0,4 Iп;
-при тяжелом пуске (время пуска более 10 с) ток плавкой вставки равен Iвсн≥(0,5…0,6)Iп;
-независимо от условий пуска Iвсн = (1,3…1,5)Iп,
-где Iп – пусковой ток двигателя.
Для асинхронных двигателей с контактными кольцами (с фазным ротором) и двигателей постоянного тока номинальный ток плавкой вставки принимается равным Iвсн = (1,0…1,25)Iндв, Iвсн = (1,2…1,3)Iп.
Рис.1.18. Максимально – токовая защита двигателей переменного (а) и постоянного (б) тока при помощи реле максимального тока FA с
42
воздействием на линейный контактор KM (в) и реле напряжения FV (г)
Минимально – токовая защита (при обрыве обмотки возбуждения) обеспечивает отключение двигателя от сети.
Эта защита осуществляется при помощи минимального токового реле KF, включенного в контролируемую цепь, как правило, в цепь обмотки возбуждения двигателя постоянного тока или синхронного
(рис.1.19,а).
При протекании в цепи номинального тока возбуждения, реле KF втянуто и его контакт в цепи катушки контактора KM замкнут, разрешая подключение двигателя к напряжению питающей сети.
При снижении тока в контролируемой цепи ниже значения тока уставки, реле KF отключается, его контакт в цепи катушки KM размыкается, КМ обесточивается, что приводит к отключению двигателя от сети.
Обрыв обмотки возбуждения в машинах постоянного тока может привести к недопустимому возрастанию якорного тока при работе под нагрузкой, или к недопустимому возрастанию угловой скорости вращения электродвигателя при работе на холостом ходу.
Рис.1.19. Схема защиты двигателя постоянного токаот «обрыва поля» (а) и превышения напряжения (б)
Защита от перенапряжения в обмотке возбуждения
необходима при отключении обмотки от сети.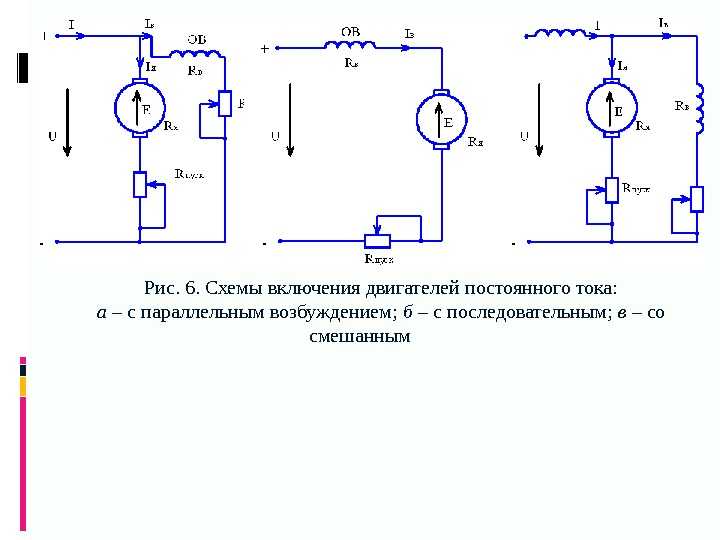
43
сопротивления которого выбирается в 3 – 6 раз больше сопротивления обмотки возбуждения (рис.1.19,а). Для снижения потерь электрической энергии в цепь разрядного резистора включается диод V, предотвращающий протекание тока сети по резистору Rр.
Защита от превышения напряжения обеспечивает отключение двигателя от сети при увеличении напряжения более (10 – 15)% от номинального. При этом с помощью реле напряжения KV (рис.1.19,б) отключается от сети обмотка якоря двигателя.
Тепловая защита двигателя (защита от обрыва фазы) –
обеспечивает отключение двигателя от сети при длительной перегрузке его током, несколько превышающим номинальный.
При продолжительном режиме работы асинхронного двигателя используют два тепловых реле FP1 и FP2 (рис. 1.20,а), или автоматические выключатели с тепловым расцепителем (рис.1.20,б). При повторно – кратковременном режиме работы асинхронного двигателя применяют два максимально – токовых реле FA1 и FA2 (рис.1.20,б), при этом реле FA3 служит для обеспечения максимально – токовой защиты. Для асинхронных двигателей используют два тепловых или максимально
1.20,а), или автоматические выключатели с тепловым расцепителем (рис.1.20,б). При повторно – кратковременном режиме работы асинхронного двигателя применяют два максимально – токовых реле FA1 и FA2 (рис.1.20,б), при этом реле FA3 служит для обеспечения максимально – токовой защиты. Для асинхронных двигателей используют два тепловых или максимально
– токовых реле в двух фазах, для машин постоянного тока – одно реле.
Рис.1.20. Тепловая защита с помощью тепловых (а) и максимально
– токовых (б) реле
Номинальный ток нагревательного элемента Iнэ теплового реле и теплового расцепителя автомата Iтр выбирают из условия Iнэ = Iтр ≈ Iндв.
44
В схему, показанную на рис.1.20,б вводится реле времени КТ, которое шунтирует контакты реле FA1 и FA2 во время пуска двигателя, т. к. пусковой ток значительно больше тока срабатывания реле FA1 и FA2. Ток уставки максимально – токовых реле FA1 и FA2 выбирают из условия:
I3ф < Iуст < I2ф,
где I2ф, I3ф – токи при работе двигателя на двух и трех фазах.
При обрыве одной из фаз асинхронного двигателя, он будет продолжать работу на двух фазах, но при этом возрастет потребляемый из сети ток, что вызовет срабатывание либо тепловых реле, либо максимально – токовых реле, приводящее к отключению двигателя от сети.
Защита от самозапуска (нулевая защита) обеспечивает отключение двигателя от сети при исчезновении или чрезмерном снижении напряжения сети. При кнопочном управлении (рис.1.21,а) защиту осуществляет контактор KM, который, отпадая, размыкает свой блокировочный контакт, шунтирующий кнопку SB2, и поэтому самовключения контактора не произойдет.
При управлении с помощью командоконтроллера используют реле минимального напряжения FV (рис.1.21,б), которое включается при нулевом положении командоконтроллера и шунтирует контакт SM0, обеспечивая работу схемы с нулевого начального положения.
Рис.1.21. Узлы схем нулевой защиты двигателейпеременного и постоянного тока с помощьюлинейного контактора КМ (а) и реле
напряжения FV (б)
45
Путевая (конечная) защита защищает производственный механизм от движения рабочего органа механизма далее конечного положения. Она осуществляется конечными (путевыми) выключателями (например, ограничение хода тележки мостового крана в направлении вперед и назад осуществляется двумя конечными выключателями, установленными на определенном расстоянии от конечного положения тележки с учетом выбега электропривода при торможении).
Она осуществляется конечными (путевыми) выключателями (например, ограничение хода тележки мостового крана в направлении вперед и назад осуществляется двумя конечными выключателями, установленными на определенном расстоянии от конечного положения тележки с учетом выбега электропривода при торможении).
Контрольные вопросы:
1.Какие достоинства и недостатки присущи управлению пуско – тормозными режимами в функции тока?
2.Почему данный способ не имеет широкого применения на практике?
3.Как выполняется пуск двигателя выше основной скорости и контроле величины якорного тока?
4.Почему в схеме рис. 1.15 применяют два реле противовключения?
5.Приведите символьное описание работы схемы на рис.1.15
6.Что такое защита в схемах электропривода?
7.Какие аварийные режимы могут быть в электрических цепях электропривода?
8.Какие аварийные режимы могут возникнуть в механической части электропривода?
9.Как осуществляется максимально – токовая защита электропривода?
10. Как выбирается токовая уставка для асинхронных короткозамкнутых двигателей?
Как выбирается токовая уставка для асинхронных короткозамкнутых двигателей?
11.Как правильно выбрать предохранители для защиты двигателя постоянного тока?
12.С какой целью выполняется минимальная токовая защита?
13.Чем опасен обрыв обмотки возбуждения двигателя постоянного тока?
14.С какой целью применяют тепловую защиту электропривода?
15.Какие электрические аппараты применяют для осуществления тепловой защиты электропривода?
16.Как выполняется тепловая защита при повторно – кратковременном режиме работы?
17.Как реализуется защита от самозапуска электропривода?
46
Цепь управления скоростью двигателя постоянного тока
by Shagufta Shahjahan 7715 просмотров
В этом уроке мы демонстрируем проект схемы управления скоростью двигателя постоянного тока. Главной особенностью DC Motor Speed CONTROL является схема ШИМ на основе микросхемы 555, предназначенная для получения переменного напряжения по сравнению с постоянным напряжением. Вот процедура для PWM.
Главной особенностью DC Motor Speed CONTROL является схема ШИМ на основе микросхемы 555, предназначенная для получения переменного напряжения по сравнению с постоянным напряжением. Вот процедура для PWM.
Возьмите простую схему, как показано на следующей схеме. Эта схема проста в изготовлении и требует нескольких недорогих компонентов, включая источник питания, двигатель постоянного тока, микросхему таймера 555, резисторы, конденсатор, потенциометр, переключатель и L29.3D ИС.
Buy from Amazon
Hardware ComponentThe following components are required to make DC Motor Speed Control Circuit
| S. No | Component | Value | Qty |
|---|---|---|---|
| 1 | 555 Таймер IC | 1 | |
| 2 | Конденсатор | 10NF | 1 |
| 3 | ПЕРЕКЛЮЧАТЕЛЬ | ||
| 3 | |||
| 3 | 0035 – | 1 | |
| 4 | Diode | IN4148 | 2 |
| 5 | potentiometer | 100K -220K | 1 |
| 6 | IC | L293D | 1 |
| 7 | Small DC motor | – | 1 |
| 8 | Power supply | 9V | 1 |
| 9 | Resistor | 1K, 100R | 1 |
NE555 IC Pinout
Для подробного описания расписания, функций Dimension и спецификаций COUNTER 9001 9001 4005 DASPANARANARAN DAST DASPANARANARVAN 7005 7005 DARSE 7005 7005 DARSE 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 7005 70057 ТАЙМЕР IC выдает ШИМ-сигнал, зависящий от отношения сопротивления потенциометра к источнику питания, с коэффициентом заполнения. Конденсатор должен здесь нагружать и разгружать другой набор резисторов из-за потенциометра и пары диодов. Таким образом, конденсатор заряжается и разряжается за разное время. Выход высокий во время загрузки конденсатора и низкий во время разгрузки конденсатора. Мы различаемся высоким выходным сигналом, низким временем вывода и, следовательно, ШИМ.
Конденсатор должен здесь нагружать и разгружать другой набор резисторов из-за потенциометра и пары диодов. Таким образом, конденсатор заряжается и разряжается за разное время. Выход высокий во время загрузки конденсатора и низкий во время разгрузки конденсатора. Мы различаемся высоким выходным сигналом, низким временем вывода и, следовательно, ШИМ.
ШИМ таймера подается на сигнальный вывод h-моста L239D для управления генератором постоянного тока. Мы получаем другое среднеквадратичное напряжение на клеммах и обороты в минуту с разным коэффициентом ШИМ. ШИМ таймера подключен ко второму сигнальному выводу для изменения направления вращения.
Области применения и использование
Двигатели постоянного тока подходят для многих применений, включая конвейеры, поворотные столы и другие применения, требующие динамической скорости и постоянного и низкоскоростного крутящего момента. Они хорошо вписываются даже в сложные приложения для динамического торможения и управления задним ходом, популярные во многих типах промышленного оборудования.
Похожие сообщения:
Схема привода двигателя постоянного тока
Схемы привода двигателя постоянного тока могут быть упакованы в небольшие модули, подобные изображенной здесь плате.
Моторные приводы, как следует из названия, используются для привода двигателей и управления их скоростью, а также направлением вращения. ИС драйвера двигателя представляют собой базовые усилители тока, которые отвечают за подачу требуемой мощности на двигатель. Однако термин «моторный привод» может также в совокупности относиться к общей системе, предназначенной для управления движением различных двигателей. Эти системы также могут быть построены из отдельных компонентов, особенно когда требуются более высокие мощности.
В этой статье мы рассмотрим схемы привода двигателя на системном уровне, где компоненты привода интегрированы в одну систему с двигателем и схемой управления. Сама секция драйвера обычно представляет собой мостовую схему с определенной конфигурацией привода; мы рассмотрим эти конфигурации вождения в этой статье.
Схемы и системы привода двигателей объединяют несколько компонентов в единый блок или узел. На самом высоком уровне моторные приводы включают в себя набор функциональных блоков, показанных на схеме ниже.
Часть микроконтроллера срабатывает, когда задающая схема начинает работать, и она может обрабатывать данные, полученные от задающей схемы, если есть какая-либо обратная связь по положению или скорости (например, с резольвером двигателя). Схема драйвера включает в себя все схемы, необходимые для возбуждения схемы драйвера, хотя возбуждение может обеспечиваться микроконтроллером, если схема драйвера может запускаться на логических уровнях. Это может иметь место в схемах драйвера двигателя MOSFET со средней выходной мощностью.
Топология привода двигателя с Н-мостом
Наиболее распространенной топологией схемы привода двигателя постоянного тока является Н-мост. Эта схема показана ниже, и ее Н-образная топология дала ей название. Двигатели постоянного тока могут работать как по часовой стрелке, так и против часовой стрелки с использованием H-моста, контролируя направления управляющих токов в каждом из полевых МОП-транзисторов в цепи.
МОП-транзисторы являются наиболее распространенными компонентами, используемыми для реализации конструкции Н-моста. Включение Q1 и Q4 заставляет двигатель работать в одном направлении, в то время как замыкание Q2 и Q3 заставляет двигатель двигаться в противоположном направлении. Та же схема драйвера может работать с широтно-импульсной модуляцией (ШИМ), что позволяет динамически управлять скоростью во время работы.
Альтернативные приводы двигателей с контроллерами
Схема привода H-Bridge состоит из электронных компонентов, которые соединяют ШИМ или аналогичные входы цифрового управления с затворами MOSFET. Он выполняет две основные функции:
- Управление затворами путем преобразования входных напряжений в соответствующие уровни.
- Подайте достаточное количество тока для быстрой зарядки и разрядки ворот.
Кроме того, некоторые цепи управления имеют другие особенности, такие как:
- Режимы привода определяют, как входная команда преобразуется в сигналы для управления воротами.

- Включает дополнительные функции безопасности, такие как защита от перегрузки по току
- Отрегулируйте продолжительность включения и выключения полевых транзисторов.
Общие схемы контроллера драйвера представлены в таблице и на изображении ниже. Здесь стоит упомянуть, что все МОП-транзисторы, используемые на стороне низкого напряжения, являются N-канальными, но на стороне высокого напряжения могут использоваться как P-канальные, так и N-канальные устройства.
Драйвер нижней стороны | Созданы специально для привода Q2 или Q4 в описанном выше Н-мосте |
Драйвер верхней стороны | Созданы специально для привода Q1 или Q3 в описанном выше Н-мосте |
Драйвер полумоста | Состоит из одного драйвера нижнего плеча и верхнего плеча, которые работают в тандеме для управления транзисторами Q1 и Q2 (или Q3 и Q4). |
Драйвер полного моста | Состоит из двух драйверов верхнего и нижнего плеча, которые могут совместно управлять всеми четырьмя полевыми МОП-транзисторами |

Проблемы проектирования драйверов двигателей с Н-образным мостом
Хотя процесс проектирования драйверов двигателей на основе Н-образного моста на первый взгляд может показаться простым, он не лишен трудностей. Это может произойти либо на этапе проектирования схемы, либо на этапе разработки прошивки. В схеме Н-моста полевые транзисторы включаются и выключаются по диагонали, но это переключение не может происходить одновременно между всеми полевыми транзисторами.
Dead Time: Всегда будет момент времени, когда все транзисторы будут открыты. Если верхний и нижний выключатели включены, произойдет кратковременная потеря напряжения и мощности или, возможно, короткое замыкание. Мертвое время может быть реализовано, чтобы предотвратить это. Это короткое время, в течение которого все полевые транзисторы H-моста включены. Мертвое время позволяет программисту отложить размыкание самого верхнего переключателя до тех пор, пока не будет замкнут самый нижний.
Частота ШИМ. Еще одним важным элементом, который необходимо правильно установить при проектировании драйвера двигателя, является частота ШИМ. Больше мощности будет потеряно на более низких частотах и наоборот. Однако, если частота ШИМ слишком высока, микроконтроллер может с трудом обеспечить необходимый сигнал ШИМ при требуемом смещении. Кроме того, драйвер затвора и транзисторные ключи могут выйти из строя из-за несовместимости с очень высокой частотой. В прошивке должна быть установлена правильная частота ШИМ, чтобы гарантировать правильную работу контроллера мотора.
Электромагнитные помехи: Наконец, экстремальные электромагнитные помехи также являются проблемой, которая может возникнуть с определенными типами двигателей, такими как коллекторные двигатели постоянного тока. Это вызвано частым переключением коммутатора, что может вызвать шум в соседних компонентах. В экстремальных случаях проводимые токи могут повредить близлежащие компоненты. Фильтры и ферриты часто используются для экранирования кабелей, которые могут улавливать эти электромагнитные помехи, особенно на более низких частотах, где сосредоточена большая часть мощности.
Это вызвано частым переключением коммутатора, что может вызвать шум в соседних компонентах. В экстремальных случаях проводимые токи могут повредить близлежащие компоненты. Фильтры и ферриты часто используются для экранирования кабелей, которые могут улавливать эти электромагнитные помехи, особенно на более низких частотах, где сосредоточена большая часть мощности.
Выбор полевого МОП-транзистора для схем управления двигателем H-Bridge
МОП-транзисторы должны иметь некоторые важные характеристики, если они будут использоваться в схемах привода двигателя:
- Способность работать с высоким напряжением и током
- Низкое сопротивление в открытом состоянии
- Минимально возможная индуктивность выводов
Для повышения допустимой нагрузки по току МОП-транзисторов, используемых в схемах привода двигателя, эти компоненты часто размещают последовательно.
Индуктивность выводов и разводка печатной платы важны для определения общей индуктивности на пути привода. Во время запуска чрезмерная индуктивность может привести к недостаточно затухающим колебаниям в цепи возбуждения, что может привести к повреждению или выходу из строя полевых МОП-транзисторов. В результате на полевых МОП-транзисторах требуется некоторая защита от переходного напряжения. Это может быть так же просто, как диод TVS и небольшой резистор, включенный последовательно с затвором, и диод с быстрым восстановлением должен быть подключен к двигателю.
Во время запуска чрезмерная индуктивность может привести к недостаточно затухающим колебаниям в цепи возбуждения, что может привести к повреждению или выходу из строя полевых МОП-транзисторов. В результате на полевых МОП-транзисторах требуется некоторая защита от переходного напряжения. Это может быть так же просто, как диод TVS и небольшой резистор, включенный последовательно с затвором, и диод с быстрым восстановлением должен быть подключен к двигателю.
Когда вы будете готовы к проектированию и моделированию схем привода двигателей постоянного тока, убедитесь, что вы используете лучшие в отрасли инструменты проектирования схем и моделирования в PSpice от Cadence. Пользователи PSpice могут получить доступ к мощному симулятору SPICE, а также к специальным возможностям проектирования, таким как создание моделей, инструменты построения графиков и анализа и многое другое.
Подпишитесь на нашу рассылку, чтобы быть в курсе последних обновлений. Если вы хотите узнать больше о том, какое решение у Cadence есть для вас, поговорите с нашей командой экспертов.