Блок питания-зарядное 0…30В/0…10А. — Радиомастер инфо
от admin
В статье рассказано, как изготовить блок питания мощностью до 300Вт с регулировкой напряжения от 0 до 30В и тока от 0 до 10А.
Назначение блока питания.
- Обеспечение питанием различных устройств, рассчитанных на напряжение от 0 до 30В и потребляющих ток до 10А.
- Зарядка любых аккумуляторов, от пальчиковых до автомобильных емкостью до 100Ачас.
Основные характеристики.
- Максимальная выходная мощность 300Вт.
- Выходное напряжение плавно регулируется от 0 до 30В.
- Выходной ток плавно регулируется от 0 до 10А.
- Пульсации выходного напряжения около 50мВ.
- Защита от короткого замыкания.
- Принудительное охлаждение.
- Напряжение питающей сети 180В…245В.


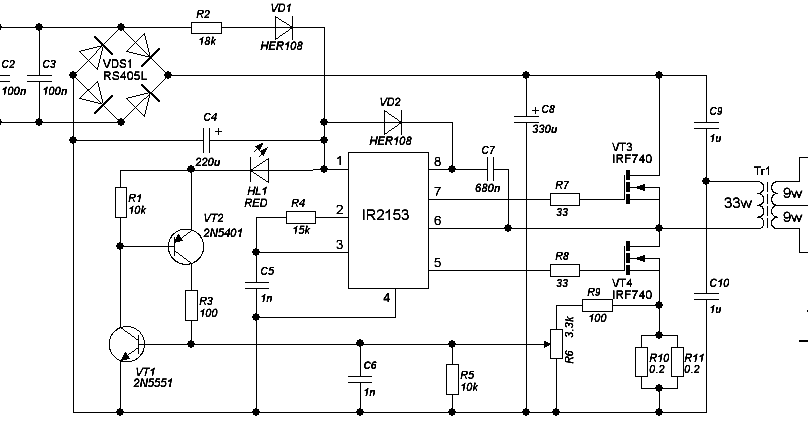
Блок питания собран по двухтактной полумостовой схеме. За основу взята схема из статьи здесь. Внесены незначительные изменения печатной платы под свой блок питания модуля управления и выходной трансформатор.
Схема силового блока:
Печатная плата силового блока:
Схема модуля управления:
Печатная плата модуля управления под обычные детали (в оригинале статьи под SMD):
Блок питания платы управления выполнен на трансформаторе дежурного режима от телевизора. Переменное напряжение на его вторичной обмотке 16В, при напряжении сети 230В. Этого достаточно для работы при разбросе напряжения сети от 180В до 245В.
В качестве стабилизатора применена микросхема 7812.
Согласующий трансформатор намотан на ферритовом кольце 2000НМ размером 16х10х4.5мм. Мотать в три провода 30 витков. Затем распаять с учетом начала обмотки как показано на схеме. Чтобы проще вместить витки, для первичной обмотки я применял провод в двойной изоляции, а две вторичные, обычный обмоточный провод.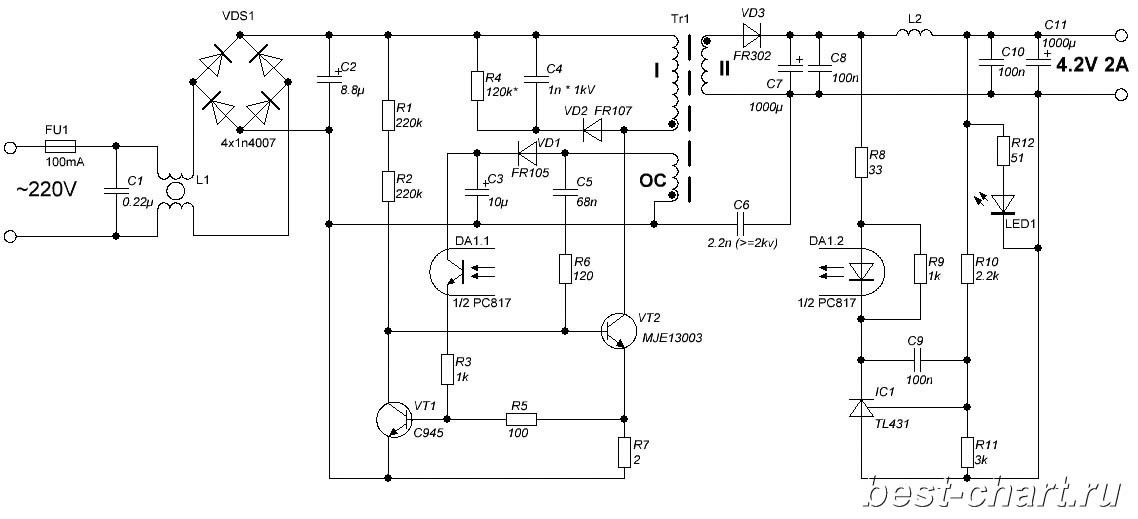
Выходной трансформатор 7700А ВСК-01С использован от компьютерного блока питания. Индуктивность его первичной обмотки до разборки равна 9360 мкГн, 12-ти вольтовая 1600 мкГн, 5-ти вольтова – 686 мкГн. Склеенный сердечник разобран в кипятке. Смотана половина первичной обмотки 19 витков Ø 0.75мм. Затем две вторичные по 4 витка Ø 0.75мм х 2 плюс 3 витка Ø 0.75мм х 6.
Смотано 4 витка:
Оставшиеся 3 витка:
Схема трансформатора 7700 компьютерного БП выглядит так:
Т.е. часть 5-ти вольтовой обмотки намотана в 6 проводов, а 12-ти вольтовой в 2 провода. Всего каждая обмотка содержит 7 витков.
Для проверки рассчитаем трансформатор в программе Старичка:
Расчет практически совпадает с реальным трансформатором. Первичная 41 виток. Я смотал половину первичной 19 витков. Вторичная для 12В 7 витков, для 30 буду мотать по 14 витков каждую половинку проводом Ø 0.75мм х 2. В конце сверху намотаю вторую половину первички, которую я сматывал.
Запуск блока питания.
Полевые транзисторы не запаяны.
Сначала подал 12В на плату управления. Ее вывод «шунт» соединил с корпусом. Осциллографом проверил импульсы на выходе каждого канала. Должно быть так:
Затем запаиваем полевики. 12 вольт на плату управления подаем. На силовую часть вместо напряжения сети подаем постоянное напряжение не менее 55В от блока питания с ограничением тока. Я выставлял ограничение тока 1А. На выходе блока питания должно быть около 5…7В. Проверяем осциллограммы на полевиках и на выходных диодах. Пробуем регулировать напряжение. Все должно работать в небольших пределах. Если все нормально, выключаем и подключаем к сети через лампу накаливания около 100Вт.
Проверяем регулировку напряжения. При необходимости корректируем изменением номинала R4 на плате управления или подстроечным резистором (на печатной плате предусмотрено место под подстроечный резистор около 20…50кОм). Затем регулятор тока на минимум, закорачиваем выходные провода и начинаем увеличивать ток КЗ. При появлении писка, или загорании лампы на малых токах выключаем и увеличиваем номинал С1 вдвое. Снова пробуем увеличивать ток. На токе до 7…8А лампа не должна даже тлеть. Границы ограничения тока можно изменить номиналом R2.
Затем регулятор тока на минимум, закорачиваем выходные провода и начинаем увеличивать ток КЗ. При появлении писка, или загорании лампы на малых токах выключаем и увеличиваем номинал С1 вдвое. Снова пробуем увеличивать ток. На токе до 7…8А лампа не должна даже тлеть. Границы ограничения тока можно изменить номиналом R2.
Для повышения устойчивости работы я увеличил мертвое время выходных импульсов подав на вывод 4 микросхемы TL494 напряжение 0.28В с делителя, установленного с выводов 13,14 на корпус. На схеме модуля управления эти резисторы показаны.
Проверяем работу блока на разных нагрузках. Оцениваем пульсации и падение напряжения под нагрузкой.
Конструктивно блок питания размещен в корпусе компьютерного блока питания. Использован его сетевой разъем, выключатель и вентилятор. Для индикации применен популярный вольтметр-амперметр 100В/10А. Вентилятор и индикатор запитаны от источника питания модуля управления. Для снижения шума вентилятор запитан через сопротивление 51 Ом, 0,5 Вт.
Материал статьи продублирован на видео.
Схема импульсного блока питания — четыре версии на чипе IR2153
Содержание
- Схема импульсного блока питания — 4 рабочие схемы
- В общем начнем пока с так называемого «высоковольтного» блока питания:
- Теперь рассмотрим следующий блок питания:
- Теперь третья схема импульсного блока питания на мощных полевых транзисторах IRFP460:
- Четвертая схема импульсника:
Схема импульсного блока питания, но не одна, а сразу четыре. В этом материале будет представлено вам несколько схем импульсных источников питания, выполненных на популярной и надежной микросхеме IR2153. Все эти проекты были разработаны известным пользователем Nem0. Поэтому я здесь буду писать от его имени. Показанные здесь все схематические решения были пару лет назад лично автором собраны и протестированы.
Показанные здесь все схематические решения были пару лет назад лично автором собраны и протестированы.
Но вот сейчас, в середине 2018 года, автор решил вновь предложить их вам для повторения, схемы абсолютно рабочие. В данной статье к сожалению не каждая схема имеет для наглядности фото уже готового прибора, но это пока все, что есть.
В общем начнем пока с так называемого «высоковольтного» блока питания:
Схема традиционная, которую использует Nem0 в большинстве своих конструкций импульсников. Драйвер получает питание напрямую от электросети через сопротивление. Это в свою очередь способствует уменьшению рассеиваемой на этом сопротивлении мощности, сравнительно с подачей напряжения от цепи 310v. Схема импульсного блока питания располагает функцией плавного включения напряжения, что существенно ограничивает пусковой ток. Модуль плавного пуска запитывается через конденсатор С2 понижающий сетевое напряжение 230v.
В блоке питания предусмотрена эффективная защита предотвращения короткого замыкания и пиковой нагрузки во вторичном силовом тракте. Роль датчика тока выполняет постоянный резистор R11, а регулировку тока срабатывания защиты выполняется с помощью подстроечника R10. Во время отсечки тока защитой, начинает светится светодиод, сигнализирующий о том, что защита сработала. Выходное двух полярное выпрямленное напряжение составляет +/-70v.
Роль датчика тока выполняет постоянный резистор R11, а регулировку тока срабатывания защиты выполняется с помощью подстроечника R10. Во время отсечки тока защитой, начинает светится светодиод, сигнализирующий о том, что защита сработала. Выходное двух полярное выпрямленное напряжение составляет +/-70v.
Трансформатор выполнен с одной первичной обмоткой, состоящей из пятидесяти витков, а 4 вторичные обмотки, содержат по двадцать три витка. Диаметр медной жилы и магнитопровод трансформатора расчитываются в зависимости от заданной мощности определенного блока питания.
Теперь рассмотрим следующий блок питания:
Эта версия блока питания во много схожа с описанной выше схемой, хотя в ней имеется существенное отличие. Дело в том, что здесь напряжение питания на драйвер поступает от специальной обмотки трансформатора, через балластный резистор. Все остальные компоненты в конструкции практически одинаковы.
Мощность на выходе этого источника питания обусловлено как характеристикой трансформатора и параметрами микросхемы IR2153, но и ресурсом диодов в выпрямителе. В данной схеме были задействованы диоды КД213А, у которых обратное максимальное напряжение 200v и прямой максимальный ток 10А. Для обеспечения корректной работы диодов при больших токах, их нужно устанавливать на радиатор.
В данной схеме были задействованы диоды КД213А, у которых обратное максимальное напряжение 200v и прямой максимальный ток 10А. Для обеспечения корректной работы диодов при больших токах, их нужно устанавливать на радиатор.
Отдельного внимания заслуживает дроссель Т2. Наматывают его на совместном кольцевом магнитопроводе, в случае необходимости можно использовать другой сердечник. Намотка делается эмаль-проводом с сечением рассчитанным согласно току в нагрузке. Также и мощность импульсного трансформатора определяется в зависимости от того, какую выходную мощность вы хотите получить. Очень удобно делать расчеты трансформаторов с помощью специальных компьютерных калькуляторов.
Теперь третья схема импульсного блока питания на мощных полевых транзисторах IRFP460:
Этот вариант схемы уже имеет конкретную разницу относительно предыдущих моделей. Главные отличия, это система защиты от КЗ и перегруза здесь собрана с использованием трансформатора по току. И есть еще одна разница, это наличие в схеме пары предвыходных транзисторов BD140. Именно эти транзисторы дают возможность отрезать большую входную емкость мощных полевых ключей, относительно выхода драйвера.
Именно эти транзисторы дают возможность отрезать большую входную емкость мощных полевых ключей, относительно выхода драйвера.
Есть еще маленькое отличие, это гасящий напряжение резистор, относящейся к модулю плавного включения, установлен он в цепи 230v. В предыдущей схеме он расположен в силовом тракте +310v. Кроме этого в схеме имеется ограничитель перенапряжения, служащий для гашения остаточного импульса трансформатора. Во всем остальном никаких различий между приведенными выше схемами у этой больше нет.
Четвертая схема импульсника:
В этой схеме все упрощено до придела, здесь нет защиты от короткого замыкания, но собственно она не особо и нужна. В этом варианте блока питания, ток на выходе вторичной цепи 260v уменьшается на сопротивлении R6. Резистор R1 обрезает пиковый ток при пуске, а также сглаживает сетевые искажения.
Скачать: Дополнительные файлы
3,0 А, понижающий импульсный регулятор
%PDF-1.4 % 1 0 объект > эндообъект 5 0 объект > эндообъект 2 0 объект > эндообъект 3 0 объект > эндообъект 4 0 объект > транслировать application/pdf
Проектирование мощности для чувствительных цепей | 2017-10-11
Эта статья получила награду за выдающийся документ от EDI CON USA 2017.
В настоящее время внимание к целостности питания связано с поддержанием низкого и плоского импеданса в высокоскоростных устройствах, таких как устройства памяти, FPGA, ЦП и приемопередатчики SerDes, как несколько распространенных примеров. Единственная цель состоит в том, чтобы обеспечить стабильное напряжение питания в указанном диапазоне для этих высокоскоростных устройств, поскольку их токи нагрузки динамически изменяются.
Целостность питания — это гораздо более широкая тема, которая применима и к маломощным цепям. Многие маломощные схемы сверхчувствительны к шуму источника питания. Примеры сверхчувствительных схем включают генераторы тактовых импульсов (XO), малошумящие усилители (LNA), контуры фазовой автоподстройки частоты (PLL), смесители и прецизионные источники опорного напряжения, и это лишь некоторые из них.
Наиболее распространенные показатели производительности этих чувствительных цепей включают в себя напряжение и токовый шум, фазовый шум, временной джиттер и паразитные сигналы. На эти характеристики часто влияет шум источника питания, хотя взаимосвязь между рабочими характеристиками схемы и шумом источника питания определяется редко.
На эти характеристики часто влияет шум источника питания, хотя взаимосвязь между рабочими характеристиками схемы и шумом источника питания определяется редко.
В этом документе показано, как производительность этих чувствительных схем может ухудшиться из-за шума источника питания, как количественно определить чувствительность к шуму источника питания и как спроектировать источник питания для достижения оптимальной производительности.
Чувствительность к шуму источника питания
Когда шумовой сигнал подается на нелинейную цепь, отдельные частоты перемножаются, что приводит к смешиванию продуктов. Например, простая схема, показанная на рисунке 1, содержит сигнал частотой 100 МГц со смещением постоянного тока для смещения кремниевого диода. На диод также подается второй сигнал частотой 500 кГц. Диод является нелинейным элементом, в котором напряжение связано с логарифмом тока диода.
Рис. 1. Простая модель двух синусоид, подключенных к кремниевому переходу (диоду)
Моделирование баланса гармоник выполняется для демонстрации содержания гармоник в напряжении на диоде.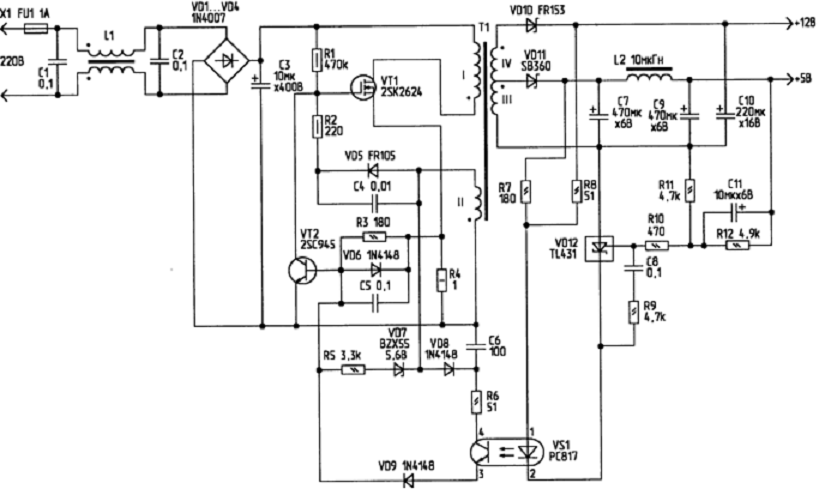 При амплитуде 500 кГц, установленной на -65 дБм, наблюдается только сигнал 100 МГц, как показано на рисунке 2.
При амплитуде 500 кГц, установленной на -65 дБм, наблюдается только сигнал 100 МГц, как показано на рисунке 2.
Рисунок 2 до -30 дБм на рис. 3. Сигнал 500 кГц проявляется как шум на частоте 500 кГц (не показан), но также отображается как сумма и разность частот 100 МГц + 500 кГц и 100 МГц – 500 кГц. Амплитуда 100 МГц остается относительно неизменной.
Рис. 3. 100 МГц и смещение постоянного тока с уровнем амплитуды 500 кГц, установленным на -30 дБм
Дальнейшее увеличение сигнала 500 кГц до -10 дБм показывает, что нелинейность также добавляет сумму и разность гармоник 500 кГц, как показано на рисунке 4. . следовательно, они демонстрируют это нелинейное явление. Эти суммарные и разностные (или смешанные) частоты являются мерой производительности генераторов, МШУ, АЦП и других чувствительных схем. Хотя эти частоты смешения могут генерироваться несколькими источниками, одним из наиболее распространенных и часто доминирующих источников являются источники питания.
Определение чувствительности
Часто бывает трудно определить допустимый уровень шума источника питания, поскольку эта информация обычно не публикуется в технических описаниях компонентов. Кроме того, существует очень большая разница между производителями и даже разными моделями в линейке продуктов одного производителя.
Например, в случае кварцевого генератора существует множество топологий генератора; некоторые включают в себя внутренние PLL, внутренние регуляторы напряжения или фильтрующие компоненты. Хотя эти внутренние схемы, как правило, не публикуются, их влияние можно увидеть при измерении фазового шума или джиттера.
Графики фазового шума для двух разных тактовых генераторов с частотой 125 МГц иллюстрируют эту разницу на рис. 5. На одном графике виден характерный горб, как правило, результат работы внутренней PLL, а на другом — нет. Два тактовых генератора также имеют значительно различающийся интегральный временной джиттер: у одного 377 фс, а у другого 1,5 пс.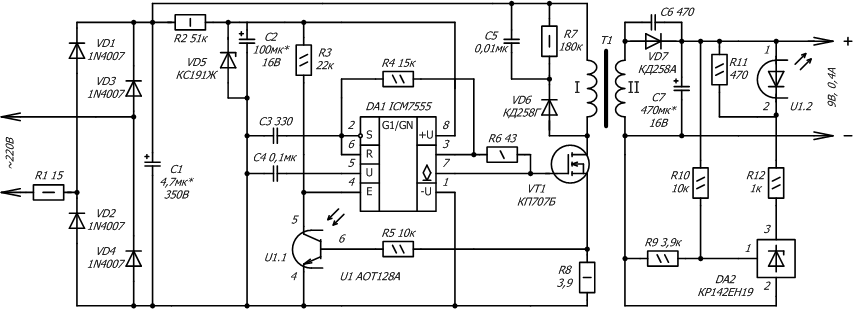
Рис. 5. Графики фазового шума для двух разных тактовых генераторов с частотой 125 МГц от двух разных производителей. Настройка одного из часов, расположенного на демонстрационной плате Picotest VRTS3, показана на рисунке 6. Такая же настройка используется для второго часа.
Рис. 6. Демонстрационная плата Picotest VRTS3 с линейным инжектором J2120A, измеряющая спектр тактового сигнала 125 МГц Графики на рисунке 7 сравнивают фазовый шум двух тактовых импульсов с введенным шумом и без него. Часы Silicon Labs 571 нечувствительны к шуму модуляции источника питания, поскольку они включают в себя стабилизатор напряжения с высоким шумоподавлением внутри часов. Фазовый шум других часов, Fox Xpresso, ухудшается почти на 25 дБ из-за источника питания, и потребуется конструкция источника питания с низким уровнем шума. Часы Xpresso также имеют внутренний резонанс на частоте 150 кГц, что очевидно наряду со всеми гармониками этого резонанса. Эта чувствительность к шуму должна быть тщательно взвешена в процессе выбора.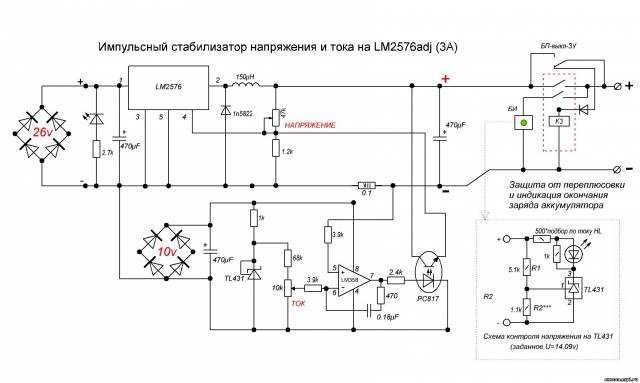 Дополнительную стоимость и физическую площадь платы, занимаемую компонентами блока питания, лучше потратить на часы с низкой чувствительностью. Тем не менее, есть много чувствительных схем, которые будут чувствительны к шуму источника питания, и в этой статье показано, как проектировать источники питания с низким уровнем шума.
Дополнительную стоимость и физическую площадь платы, занимаемую компонентами блока питания, лучше потратить на часы с низкой чувствительностью. Тем не менее, есть много чувствительных схем, которые будут чувствительны к шуму источника питания, и в этой статье показано, как проектировать источники питания с низким уровнем шума.
Рис. 7. Графики фазового шума двух часов с добавлением шума источника питания и без него. Выбор тактового генератора, менее чувствительного к шуму источника питания, является одним из способов уменьшения фазового шума.
Определение пределов шума источника питания
Оптимальные характеристики тактовой частоты определяются путем измерения фазового шума с использованием почти идеального источника питания. Это обеспечивает оптимальную производительность тактового генератора, которая показана на рис. 8 вместе с шумом от двух источников питания с более высоким уровнем шума.
Рис. 8 Фазовый шум тактовой частоты, питаемый линейным инжектором J2120A с нулевой модуляцией, по существу «бесшумным» источником питания, а также двумя другими источниками питания
Измерения плотности шума прямого напряжения для трех источников питания, используемых в 8 показаны на рисунке 9.
источники питания, показанные на рисунке 9. Результаты представлены на рис. 10.
Проектирование фильтра помех источника питания
Как допустимый шум источника питания, так и требуемое снижение шума можно определить по графику «бесшумного» источника на рис. 8 и увеличению шума при питании от регуляторов напряжения на рис. 9. Большая часть шума регулятора напряжения возникает из-за внутреннего источника опорного напряжения, поэтому его нельзя устранить на входе регулятора, а только на выходе регулятора напряжения. Удаление шума источника питания с помощью постстабилизационного фильтра требует затухания, равного ослаблению фазового шума. Например, фильтр должен обеспечивать затухание в 6 дБ на частоте 5 кГц для дополнительного шума от линейного регулятора, а фильтр с затуханием в 14 дБ на частоте 5 кГц — для импульсного регулятора. Повторение этих вычислений на каждой частоте приводит к полному определению минимального затухания фильтра для компенсации максимального шума напряжения от регулятора для достижения оптимальной работы часов.
Вставка последовательного резистора между регулятором напряжения и чувствительной схемой и конденсатора, заземляющего нагрузку, как показано на рис. 11, является простейшей формой RC-фильтра нижних частот.
Рис. 11. Схема, показывающая резистор и конденсатор, вставленные между регулятором напряжения и часами для ослабления помех источника питания
Значение резистора является компромиссом между падением напряжения на резисторе и размером требуемый конденсатор. Допуская падение на резисторе 100 мВ для этих часов, что потребляет 39мА, получается номинальное значение резистора:
Требуемая емкость рассчитывается с использованием стандартного значения резистора 2,4 Ом и требований к дельта-затуханию (дБ) на каждой частоте, как показано на рисунке 10.
Максимальное допустимое последовательное сопротивление (ESR) конденсатора определяется исходя из максимального требования к затуханию, т. е. 14 дБ в случае примера с линейным регулятором, который возникает на частоте 28 кГц.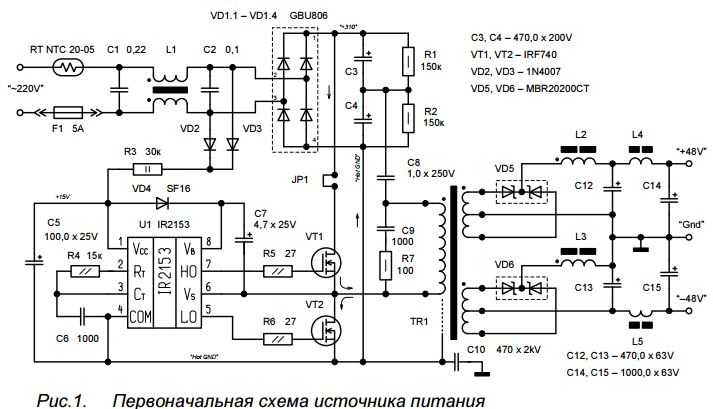
Расчетная минимальная емкость и необходимое затухание включены вместе с смоделированным затуханием с использованием резистора 2,4 Ом и конденсатора 33 мкФ, вставленных между регулятором напряжения и часами. Моделирование выполняется при трех различных значениях ESR, и результаты показаны на рисунке 12.
Рисунок 12. Требуемое затухание из рисунка 10 (точки) используется с минимальным резистором 2,4 Ом для определения минимального требуемого конденсатора из уравнения 2. Моделирование с резистором 2,4 Ом и емкостным фильтром 33 мкФ показывает частотно-зависимое затухание. для 3 разных значений ESR. Результаты подтверждают максимальную оценку ESR конденсатора в 423 мОм.
Резистор 2,4 Ом и алюминиево-полимерный конденсатор 33 мкФ, ESR 30 мОм были вставлены между регулятором напряжения и часами, и измеренный фазовый шум вместе с предыдущими измерениями показан на рис. 13. Фазовый шум линейного регулятора с добавленным фильтром теперь почти неотличим от оптимального фазового шума. Это простейший метод достижения наилучших характеристик при использовании стандартного линейного регулятора. Аналогичный, но более крупный фильтр также можно было бы сконструировать, что позволило бы использовать импульсный стабилизатор.
Это простейший метод достижения наилучших характеристик при использовании стандартного линейного регулятора. Аналогичный, но более крупный фильтр также можно было бы сконструировать, что позволило бы использовать импульсный стабилизатор.
Рис. 13. Фазовый шум с теми же тремя регуляторами, что и на рис. 8, по сравнению с результатами с полимерным электролитическим конденсаторным фильтром 2,4 Ом и 33 мкФ, подключенным к линейному регулятору. Добавление RC-фильтра (красная кривая) почти соответствует наилучшему варианту «бесшумного» источника напряжения (синяя кривая).
Расчетная минимальная емкость и затухание, необходимые для импульсного стабилизатора, включены вместе с смоделированным затуханием с использованием резистора 2,4 Ом и конденсатора 82 мкФ, вставленных между регулятором напряжения и часами. Моделирование выполняется при трех различных значениях ESR, и результаты показаны на рис. 14. Здесь мы видим, что более высокий уровень шума импульсного регулятора потребует почти удвоенной емкости и значительно более низкого ESR, чтобы соответствовать «бесшумным» характеристикам источника питания.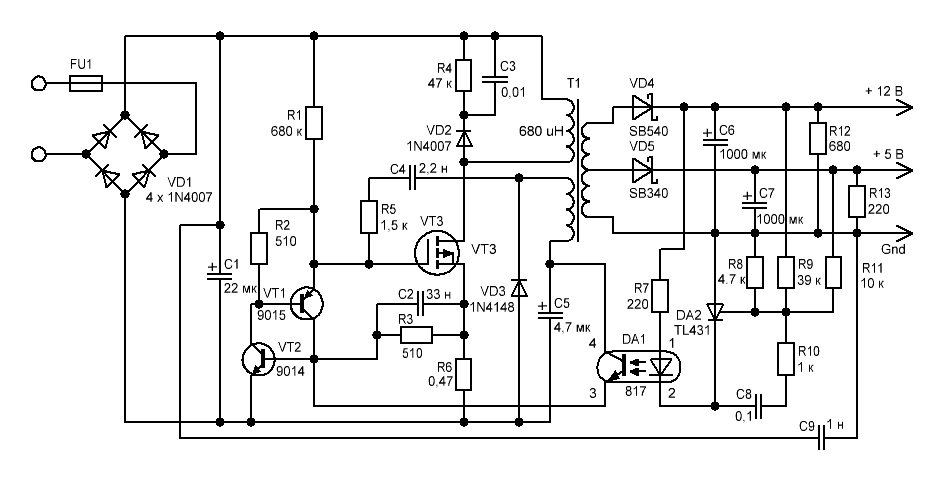
Рисунок 14. Требуемое затухание из рисунка 10 (точки), минимальный конденсатор из уравнения 2 и смоделированный фильтр 2,4 Ом и 82 мкФ. Моделируются три значения ESR, что подтверждает максимальную оценку ESR 70 мОм.
Однополюсный фильтр R-C представляет собой простое, недорогое и эффективное решение для питания чувствительных цепей от недорогого регулятора напряжения.
Интересно, что импульсный блок питания сильно шумит на частотах в десятки кГц, тогда как частота коммутации намного выше на частоте 2,8 МГц, как видно из измерения, показанного на рис. 15. На этом рисунке показана основная частота коммутации 2,8 МГц и гармоники в центральной трассе и шум с полосой пропускания 1 кГц в нижней трассе.
Рис. 15 Спектральные графики регулятора VRTS3 POL показывают коммутационные гармоники (средний график), а также широкополосный низкочастотный шум (нижний график)
На осциллограмме на рис. регулятор нагрузки (POL). На нижнем графике с центром на триггере в момент времени 0 очевидна небольшая модуляция переднего фронта. На среднем графике показана форма сигнала через 60 мкс после запуска. Теперь оба фронта кажутся сильно модулированными, что указывает как на широтно-импульсную, так и на частотную модуляцию. Эта модуляция, иногда преднамеренно добавляемая для улучшения электромагнитных помех, чтобы расширить спектральный состав и уменьшить пиковые амплитуды, приводит к низкочастотному шуму. Этот низкочастотный шум в конечном итоге определяет размер фильтра, а не пульсации при переключении.
На среднем графике показана форма сигнала через 60 мкс после запуска. Теперь оба фронта кажутся сильно модулированными, что указывает как на широтно-импульсную, так и на частотную модуляцию. Эта модуляция, иногда преднамеренно добавляемая для улучшения электромагнитных помех, чтобы расширить спектральный состав и уменьшить пиковые амплитуды, приводит к низкочастотному шуму. Этот низкочастотный шум в конечном итоге определяет размер фильтра, а не пульсации при переключении.
Рисунок 16. Узел переключения регулятора VRTS 3 POL при 0 мкс (триггер) и 62 мкс после триггера резистор. Максимальное значение индуктивности зависит от номинала последовательного резистора и конденсатора фильтра:
Увеличение значения индуктивности выше этого предела приведет к паразитным откликам или увеличению шума. Максимальное значение индуктивности, рассчитанное по уравнению 4 с использованием резистора 2,4 Ом и фильтра линейного регулятора 33 мкФ, составляет 95uH.
 Как правило, это значение будет ниже и определяется с учетом индуктивности, сопротивления постоянному току (DCR), максимального рабочего тока и размера микросхемы. Поскольку общее требуемое сопротивление не изменилось по сравнению со значением 2,4 Ом, DCR индуктора вычитается из значения 2,4 Ом, сохраняя то же падение напряжения и ослабление низкочастотного шума. Выбор катушки индуктивности с постоянным сопротивлением 2,4 Ом полностью исключает внешний резистор.
Как правило, это значение будет ниже и определяется с учетом индуктивности, сопротивления постоянному току (DCR), максимального рабочего тока и размера микросхемы. Поскольку общее требуемое сопротивление не изменилось по сравнению со значением 2,4 Ом, DCR индуктора вычитается из значения 2,4 Ом, сохраняя то же падение напряжения и ослабление низкочастотного шума. Выбор катушки индуктивности с постоянным сопротивлением 2,4 Ом полностью исключает внешний резистор.Катушка индуктивности TDK GLFR1608T470M-LR 47 мкГн/35 мА имеет номинальное значение DCR 2,3 Ом в микросхеме 0603. DCR этой катушки индуктивности достаточно близок к 2,4 Ом, так что дополнительный резистор не требуется, а фильтр не занимает дополнительной площади печатной платы по сравнению с резисторно-конденсаторным фильтром. Схема фильтра показана на рисунке 17, а смоделированное ослабление фильтра показано на рисунке 18.
Рис. 17. Индуктивность на микросхеме 47 мкГн/2,3 Ом заменяет резистор, поддерживая плотность шума и улучшая затухание и изоляцию высоких частот.
Рис. 18. Постоянное сопротивление катушки индуктивности 2,3 Ом удовлетворяет затуханию плотности шума, в то время как индуктивность значительно улучшает затухание высоких частот. Индуктивность ниже максимального значения; следовательно, в фильтре нет пиков.
Подавление низкочастотного шума полностью обеспечивается резистором. Его удаление или уменьшение увеличит шум часов, а также приведет к пикам. ESR конденсатора фиксировано на уровне 5 мОм, а DCR катушки индуктивности 47 мкГн изменяется от 0,3 до 2,3 Ом. Результаты показаны на рисунке 19.показать это наглядно. Уменьшение сопротивления до 1,3 Ом не обеспечивает требуемого затухания в 6 дБ на частоте 5 кГц, а дальнейшее уменьшение сопротивления до 0,3 Ом приводит к усилению на 11 дБ на частоте 4 кГц.
Рисунок 19. Сопротивление фильтра 47 мкГн увеличено с 0,3 Ом до 1,3 Ом и 2,3 Ом при сохранении конденсатора 33 мкФ с ESR 5 мОм. При сопротивлении 1,3 Ом фильтр не обеспечивает необходимого снижения плотности шума в 6 дБ на частоте 5 кГц.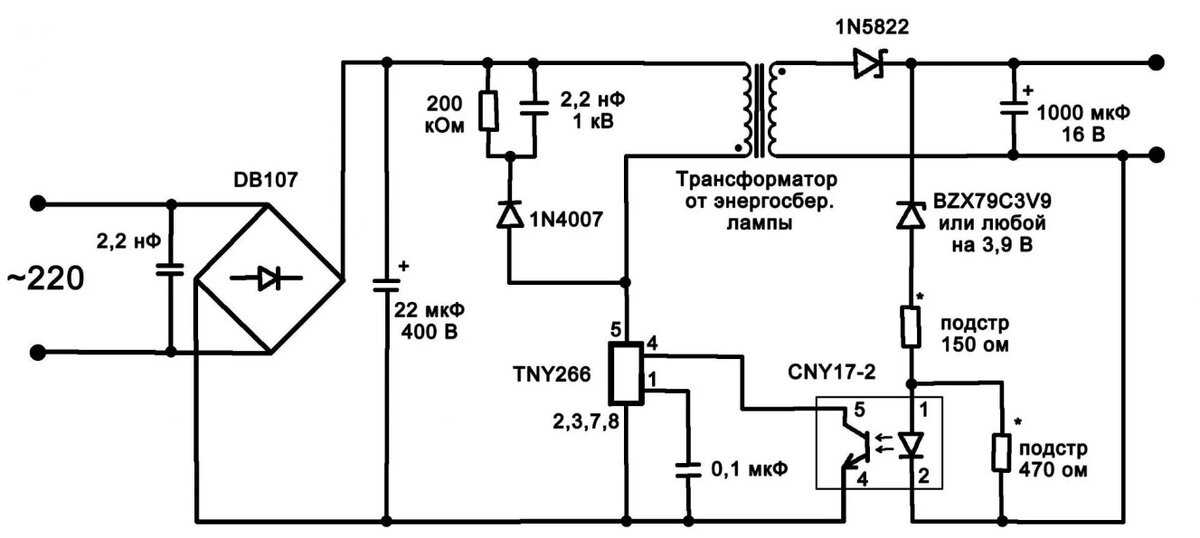
Допустимая плотность шума источника питания также может быть рассчитана непосредственно из измерений фазового шума «бесшумного» источника по сравнению с линейным и импульсным стабилизаторами, показанными на рис. 10. Шум линейного регулятора Гц приводит к допустимому шуму -18 dBuV/√Hz на частоте 5 кГц. Аналогично, вычитание ухудшения фазового шума на 14 дБ из шума импульсного стабилизатора -4 дБмкВ/√Гц также дает допустимый шум напряжения -18дБкВ/√Гц.
Высокоточные малошумящие регуляторы
Существуют высокоточные регуляторы напряжения, предназначенные для чувствительных приложений. Примеры включают Linear Technology LT3042 и Analog Device ADM7154. Блок-схема ADM7154 показана на рис. 20. Опорное напряжение обычно является доминирующим источником шума в регуляторе напряжения, поэтому буфер опорного напряжения выведен на вывод для внешней емкости, чтобы уменьшить шум источника питания. Питание усилителя к операционному усилителю и драйверу также чувствительно, так что шунтирующий контакт также выведен на внешнюю емкость, чтобы уменьшить шум источника питания. Вход регулятора MOSFET также выведен на вывод VREG, чтобы можно было подключить внешнюю емкость для снижения шума. Полная схема приложения показана на рис. 21.9.0009
Вход регулятора MOSFET также выведен на вывод VREG, чтобы можно было подключить внешнюю емкость для снижения шума. Полная схема приложения показана на рис. 21.9.0009
Рисунок 20. Блок-схема ADM7154 компании Analog Devices, взятая из технического описания производителя
Для этой схемы требуется пять конденсаторов, чтобы минимизировать шум регулятора напряжения. В большинстве случаев пассивная фильтрация более дешевого регулятора будет работать так же хорошо при небольшой доле стоимости. Это особенно верно, учитывая, что большинство чувствительных схем чувствительны к шуму напряжения, но, как правило, не требуют, чтобы абсолютный уровень напряжения был чрезвычайно точным.
Рис. 21 Типичная схема применения для ADM7154 включает 3 внешних фильтрующих конденсатора в дополнение к входному и выходному конденсаторам фильтра.
Заключение
Добавление простого резистивно-емкостного фильтра к выходу регулятора может обеспечить недорогое решение для обеспечения сверхмалошумящего источника питания для чувствительных к мощности цепей. Требуемый уровень шумоподавления можно получить при измерении чувствительной цепи с помощью выбранного регулятора напряжения по сравнению с измерением с использованием «бесшумного» источника питания или линейного инжектора. Можно использовать простые расчеты для значений R, L и C, а затем смоделировать их, чтобы проверить желаемое ослабление шума в зависимости от частоты.
Требуемый уровень шумоподавления можно получить при измерении чувствительной цепи с помощью выбранного регулятора напряжения по сравнению с измерением с использованием «бесшумного» источника питания или линейного инжектора. Можно использовать простые расчеты для значений R, L и C, а затем смоделировать их, чтобы проверить желаемое ослабление шума в зависимости от частоты.
Результаты измерений подтверждают низкий уровень шума линейного регулятора с выходным RC-фильтром. Дополнительное ослабление высоких частот для дальнейшего снижения шума нагрузки может быть достигнуто заменой резистора катушкой индуктивности, которая включает требуемый DCR.
Возможна имитация влияния шума источника питания на фазовый шум и временной джиттер с помощью симулятора больших сигналов.
Плата за специализированные малошумящие регуляторы может не понадобиться, если вас интересует низкий уровень шума, а не абсолютная точность напряжения. Малошумящие регуляторы по-прежнему требуют многочисленных внешних конденсаторов и могут фактически не уменьшать количество деталей по сравнению с простым LC-фильтром со специальными DCR и ESR.
Приложение: Советы по проектированию
Существует несколько способов повысить вероятность успешного проектирования с первого прохода.
Включите шум источника питания, а также любые индуктивности соединительных проводов и входные конденсаторы, особенно если источник питания внешний, как в настольном блоке питания.
Рисунок 22. Не забудьте включить шум источника питания, индуктивность и входную емкость соединительных проводов. В некоторых случаях емкость является внутренней, как в кварцевом генераторе. Измерьте импеданс на входных контактах, если вы не уверены.
Рис. 23. Фазовый шум генератора с учетом (синий) и без (красный) шума источника питания. Обратите внимание на повышенный уровень шума в дополнение к чистому шуму от резонансного входного соединительного кабеля.
Симулятор также может интерпретировать временной джиттер из имитации фазового шума, а маркеры можно использовать для ограничения полосы интегрирования.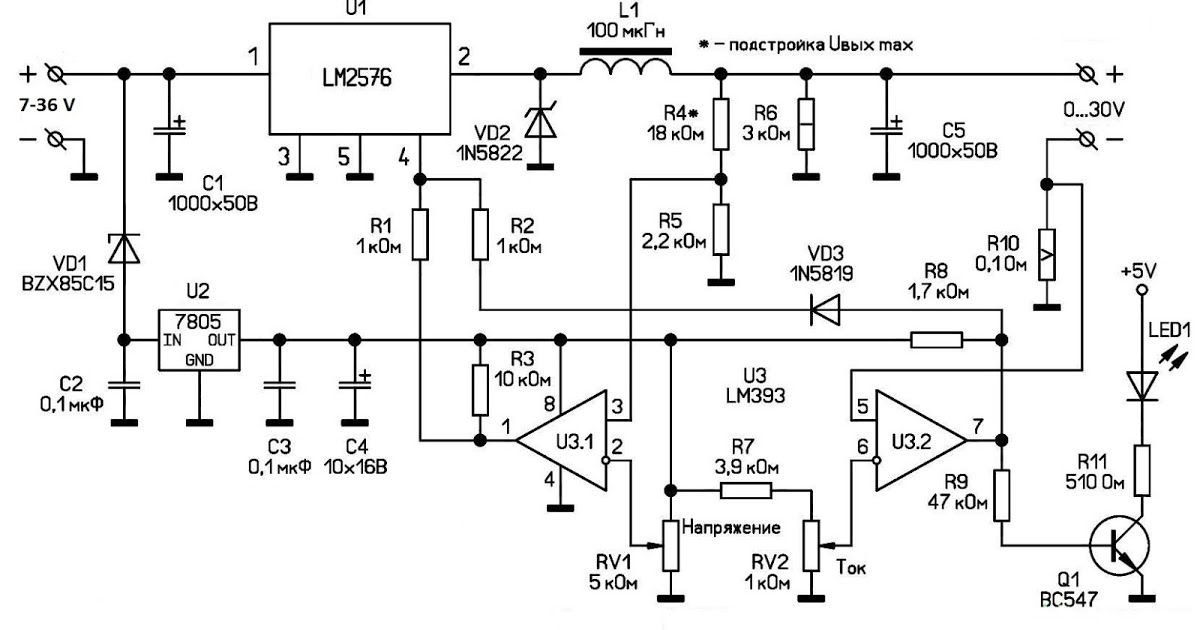
Большинство спецификаций и спецификаций относятся к джиттеру, а не к фазовому шуму. Хотя я предпочитаю фазовый шум, потому что он предоставляет данные о частоте, они напрямую связаны, что позволяет симулятору преобразовывать один шум в другой, как показано на рисунке 24.
Рисунок 24 Симулятор вычисляет площадь под кривой между маркерами f_low и f_high и преобразует фазовый шум во временной джиттер
Не все регуляторы напряжения созданы одинаковыми. Измеряйте большое разнообразие.
Мне нравится монтировать стабилизаторы напряжения на небольшие дочерние платы, которые я могу подключить к несущей плате, как показано на рис. 25. Это позволяет выполнять быстрые, точные и воспроизводимые измерения, а также может включать межсоединение для чувствительной цепи. Отклонение от одного регулятора напряжения к другому может составлять 20 дБ и более. Регуляторы напряжения с плохой стабильностью также будут демонстрировать резонансные пики, подобные пику, показанному на рис. 23.
23.
Рис. 25. Несущая плата с дочерними платами регуляторов напряжения упрощает быстрое измерение большого количества регуляторов напряжения.
Регуляторы напряжения имеют несколько путей распространения шума, включая воздух.
Регулятор напряжения имеет несколько источников шума, а не только выходной шум. Некоторый процент шума на входе регулятора напряжения будет просачиваться на выход, определяемый коэффициентом ослабления источника питания (PSRR). Выбор регулятора с высоким PSRR уменьшит внешнюю фильтрацию. Выходной импеданс также распространяет шум из-за токового шума для чувствительной схемы. Измерьте импеданс при рабочем токе нагрузки и убедитесь, что выходной импеданс низкий и плоский. Длинные неэкранированные дорожки или резонансные цепи будут чувствительны к близлежащим электромагнитным помехам. Держите чувствительные цепи как можно дальше от источников питания или экранируйте их. Как и в предыдущем примечании, убедитесь, что импеданс на входе чувствительной схемы низкий и плоский.
Рис. 26. Регулятор напряжения имеет множество путей распространения шума, а не только выходной шум.
Подключение датчика ближнего поля к широкополосному гребенку гармоник — самый быстрый и простой способ выявить резонансы, как показано в правом нижнем углу экрана на Рис. 26.
Рис. Ближнее поле — это быстрый способ обнаружить резонансы в силовых соединениях.
Каталожные номера
[1] Алан Уолш, «Проект эталонного напряжения для прецизионных АЦП последовательного приближения». http://www.analog.com/en/analog-dialogue/articles/precision-successive-approimation-adcs.html
[2] Уолт Юнг, «Создание источника опорного напряжения со сверхмалым уровнем шума». Electronic Design Analog Applications Issue, 24 июня 1993 г.
[3] Стивен М. Сэндлер, «Индуктивный характер контуров управления напряжением». http://www.edn.com/electronics-blogs/impedance-measurement-rescues/4438578/The-inductive-nature-of-voltage-control-loops
[4] Стив Хагеман, «Простые схемы снижают уровень шума регулятора».