Электродвигатели для привода механизмов, требующих ступенчатое регулирование частоты вращения производства Русэлпром
Для привода механизмов, требующих ступенчатое регулирование частоты вращения
| Наименование | Мощность, кВт |
Синхронная частота вращения, об/мин |
Напряжение, В |
|---|---|---|---|
|
АИР132S8/4 |
3,6/5 |
750/1500 |
380 |
|
АИР132M8/4 |
4,7/7,5 |
750/1500 |
380 |
|
АИР180M8/4 |
13/18,5 |
750/1500 |
380 |
|
5А200M8/4 |
15/22 |
750/1500 |
380 |
|
5А200L8/4 |
17/24 |
750/1500 |
380 |
|
5А225M8/4 |
23/34 |
750/1500 |
380 |
|
5АМ250S8/4 |
33/47 |
750/1500 |
380 |
|
5АМ250M8/4 |
37/55 |
750/1500 |
380 |
|
АИР132S8/6 |
3,2/4 |
750/1000 |
380 |
|
АИР132M8/6 |
4,5/5,5 |
750/1000 |
380 |
|
АИР180M8/6 |
11,0/15,0 |
750/1000 |
380 |
|
5А200M8/6 |
15/18,5 |
750/1000 |
380 |
|
5А200L8/6 |
18,5/23 |
750/1000 |
380 |
|
5А225M8/6 |
22/30 |
750/1000 |
380 |
|
5АМ250S8/6 |
30/37 |
750/1000 |
380 |
|
5АМ250M8/6 |
42/50 |
750/1000 |
380 |
|
АИР132S6/4/2 |
2,8/4/4,5 |
1000/1500/3000 |
380 |
|
АИР132M6/4/2 |
3,8/5,3/6,3 |
1000/1500/3000 |
380 |
|
АИР132S8/4/2 |
1,8/3,4/4 |
750/1500/3000 |
380 |
|
АИР132M8/4/2 |
2,4/4,5/5,6 |
750/1500/3000 |
380 |
|
АИР132S8/6/4 |
1,9/2,4/3,4 |
750/1000/1500 |
380 |
|
АИР132M8/6/4 |
2,8/3/5 |
750/1000/1500 |
380 |
|
АИР180M8/6/4 |
8/11/12,5 |
750/1000/1500 |
380 |
|
5А200M8/6/4 |
10,0/12/17 |
750/1000/1500 |
380 |
|
5А200L8/6/4 |
12/15/20 |
750/1000/1500 |
380 |
|
5А225M8/6/4 |
15/17/25 |
750/1000/1500 |
380 |
|
5АМ250S8/6/4 |
22/25/33 |
750/1000/1500 |
380 |
|
5АМ250M8/6/4 |
24/33/38 |
750/1000/1500 |
|
|
АИР180M12/8/6/4 |
3/5/6/9 |
500/750/1000/1500 |
380 |
|
5А200M12/8/6/4 |
4,5/8/9/12 |
500/750/1000/1500 |
380 |
|
5А200L12/8/6/4 |
5/9/11/15 |
500/750/1000/1500 |
380 |
|
5А225M12/8/6/4 |
7,1/13/14/20 |
500/750/1000/1500 |
380 |
|
5АМ250S12/8/6/4 |
9/17/18,5/27 |
500/750/1000/1500 |
380 |
|
5АМ250М12/8/6/4 |
12/21/24/30 |
500/750/1000/1500 |
380 |
Наши конкурентные преимущества:
- концерн разрабатывает и изготавливает электрические машины по индивидуальным заказам без увеличения сроков изготовления
- более высокий КПД относительно продукции иных производителей России и стран СНГ
- изготовление электродвигателей с промежуточной нестандартной мощностью, что сокращает издержки без потери качества и гарантийного срока
- показатель уровня обслуживания покупателей 95%
- изготовление электродвигателей под вашей торговой маркой
- условия оплаты и поставки с учетом особенностей склада на вашей территории
- процедура trade in, которая распространяется не только на двигатели, но и на агрегаты
При заказе вы можете выбрать:
- изготовление сертифицированных двигателей для работы в составе частотно-регулируемого привода
- подшипники различных производителей – SKF, FAG или отечественные.
 При необходимости в двигателе могут устанавливаться токоизолированные подшипники
При необходимости в двигателе могут устанавливаться токоизолированные подшипники - смазку различных производителей. Унификация еще на этапе поставки смазки с принятой на предприятии эксплуатации позволяет запускать в эксплуатацию двигатель без замены смазки и требующейся при этом промывки подшипник
- необходимую конфигурацию мест под датчики вибрации. Наиболее частыми являются заказы двигателей с местами под датчики вибрации и датчики ударных испульсов SPM, SLD. При заказе нами предлагается удобная графическая схема выбора осей измерения вибрации. Для установки уровней вибрации «Предупреждение» и «Отключение» рекомендуется использовать нормы, установленные ГОСТ Р ИСО 10816-3
- диаметр кабельного ввода силовой коробки выводов
- овальные установочные размеры в лапах
- необходимый цвет двигателя или поставку в загрунтованном виде
- протокол приемо-сдаточных испытаний
 При необходимости в двигателе могут устанавливаться токоизолированные подшипники
При необходимости в двигателе могут устанавливаться токоизолированные подшипникиРемонт асинхронных электродвигателей цена в Москве и области ООО Микропровод
Асинхронные электродвигатели — одни из самых востребованных электромашин, которые отличаются стабильной работой, долговечностью, простотой в эксплуатации и невысокой ценой.
Однако, как и другим подобным механизмам, им требуется своевременная диагностика и ремонт. Вы можете сдать асинхронный электродвигатель в завод «Микропровод» на плановый или срочный ремонт. У нас работают опытные специалисты, которые быстро и качественно отремонтируют ваш двигатель.
Что такое асинхронные электродвигатели
Асинхронные электродвигатели представляют собой двигатели переменного тока. Их частота вращения магнитного поля статора больше частоты вращения ротора. Такие двигатели используются в разных областях: промышленности, сельском хозяйстве, строительстве, общественном транспорте и т. д.
У асинхронных электродвигателей есть статор и ротор, которые разделены воздушным зазором. Активными частями подобных механизмов считаются обмотки и магнитопровод (сердечник). К остальным частям электродвигателей относятся конструктивные части, благодаря которым двигатель может вращаться, охлаждаться, обладать прочностью и жёсткостью. В зависимости от конструкции ротора асинхронные электродвигатели делятся на моторы с короткозамкнутым ротор и фазным ротором.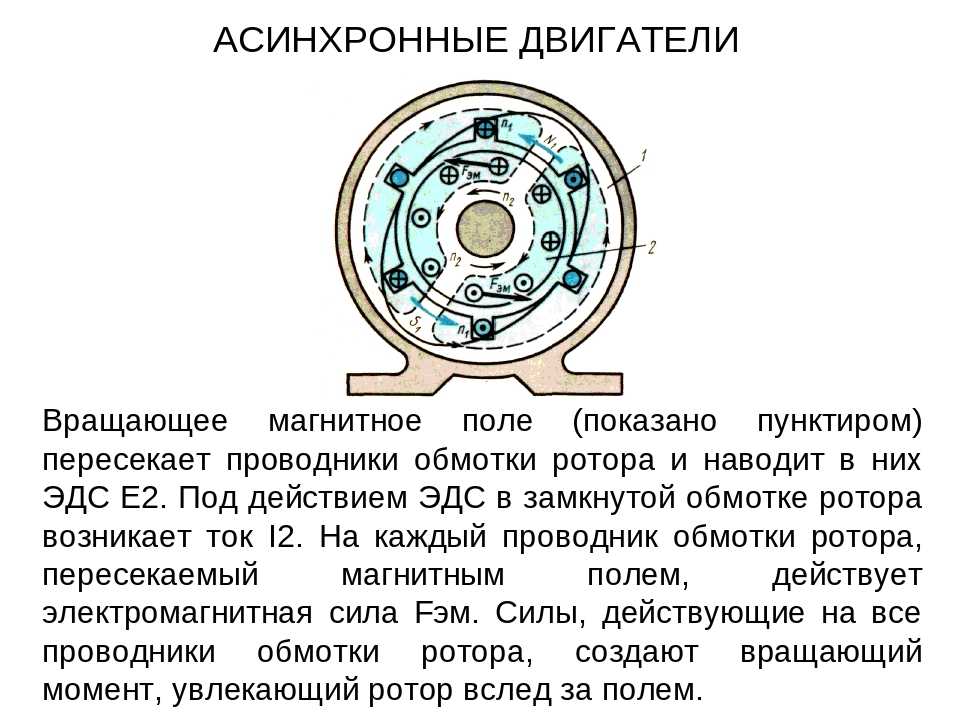
Типичные поломки асинхронных электродвигателей
Поломки асинхронных электродвигателей обычно появляются из-за естественного износа комплектующих и старения электроизоляционных материалов. Также они могут возникнуть при нарушении правил эксплуатации, которые установлены производителем. По месту возникновения поломки подразделяются на механические и электрические.
К механическим поломкам относятся:
- повреждения корпуса либо отдельных частей электрических двигателей;
- ослабленные крепления;
- перегретые подшипники;
- вытекшая смазка;
- нехарактерный для нормальной работы шум.
Электрическими поломками считаются повреждения обмотки статора, короткие замыкания витков на корпус, обрывы цепей питания.
Признаки поломок асинхронных электродвигателей
К характерным признакам асинхронных электродвигателей относятся:
- проблемы при запуске электрического мотора;
- сильный нагрев обмоток статора;
- недостаточная частота вращения вала электрической машины;
- высокий гул на высоких оборотах;
- неравномерный электроток в разных фазах.

Если агрегат запускается с большой сложностью или медленно вращается с гулом, то причиной является обрыв фаз. При этом также может отсутствовать любое вращение двигателя или сильно перегреться ротор.
Особенности ремонта асинхронных электродвигателей
Перед ремонтом проводят техническую диагностику асинхронных электродвигателей. Она необходима для выявления дефектов и причин их возникновения. Поиск неисправностей выполняют квалифицированные специалисты при помощи современного оборудования. На основании результатов диагностики решается объём выполнения будущих ремонтных работ. Также это помогает рассчитать итоговую стоимость ремонта.
Чаще всего выполняют ремонт электродвигателя, у которого нарушена целостность обмоток. При этом проводят полную перемотку электрического двигателя. Причиной такой поломки обычно является неправильная эксплуатация агрегата или его долгая эксплуатация без проведения планового ремонта.
Когда выполняется капитальный ремонт электродвигателя, проводятся следующие операции:
- демонтаж устройства;
- очистка агрегата от загрязнений и масляных следов;
- осмотр подшипниковых узлов и их обслуживание;
- монтаж новой пазовой изоляции;
- разборка обмотки статора и её замена;
- пропитка витков обмотки особым лаком;
- замена подшипников.

Все проведённые работы фиксируются в документах. Капитальный ремонт делают для полного восстановления электродвигателя. Текущий ремонт необходим для поддержания мотора в рабочем состоянии.
Услуги завода ««Микропровод»
Мы ремонтируем электродвигатели разного назначения и широкого диапазона, включая асинхронные мощностью от 0,18 до 110 квт. Наши специалисты выполняют:
- дефектоскопию узлов, деталей оборудования;
- установку новой обмотки статора;
- замену выводных концов.
У нас работают профессионалы, которые оперативно устранят неисправности. Мы используем качественные запчасти и современные инструменты.
Если вы замечаете, что электрический двигатель начинает плохо работать, сразу обращайтесь к нам. Мы находимся в Московской области. Контактный номер для связи с наши менеджером +7 (495) 641-24-78. Лучше сразу устранить дефект, чем дождаться появления серьёзной поломки, ремонт которой обойдётся намного дороже. Проведённые во время диагностика и ремонт позволят увеличить срок эксплуатации электрической машины.
Проведённые во время диагностика и ремонт позволят увеличить срок эксплуатации электрической машины.
| Схемы согласованного вращения электродвигателя |
При многодвигательном электроприводе иногда требуется, чтобы несколько электродвигателей, удаленных друг от друга на значительное расстояние, вращались с одинаковой скоростью.
Такие случаи имеют место в электроприводах экскалаторов, прокатных станов, механизмов передвижения перегрузочных мостов, некоторых типов грейферных лебедок и др. Вращение электродвигателей, имеющих различную нагрузку, с одинаковой скоростью называется согласованным. Согласованное вращение может быть осуществлено путем механического соединения их валов. Однако при значительном удалении машин друг от друга, а также при неудобном их расположении механическое соединение зачастую оказывается затруднительным, так как при этом необходимо применять валы слишком большой длины и диаметра, большое количество подшипников и других механических приспособлений, что увеличивает вес, габариты, стоимость привода и затрудняет его эксплуатацию. Для обеспечения согласованного вращения электродвигателей при неодинаковых нагрузках разработан ряд электрических схем, позволяющих получить синхронное вращение электродвигателей без использования механических приспособлений. Такие схемы называются системами синхронного вращения. В них используются асинхронные машины, обеспечивающие наиболее надежную работу привода. Различают системы синхронного вращения со вспомогательными синхронизирующими машинами и без вспомогательных машин. В состав любой системы синхронного вращения входят главные электродвигатели, обеспечивающие привод механизмов. В системах первой группы с валами главных электродвигателей соединяются вспомогательные асинхронные или синхронные машины, с помощью которых и осуществляется согласованное вращение главных электродвигателей. В системах без вспомогательных машин согласованное вращение осуществляется непосредственно за счет главных электродвигателей, соединенных определенным образом между собой. Нужно иметь в виду, что в системах со вспомогательными машинами возможно применение главных электродвигателей любого типа. Однако системы синхронного вращения с главными электродвигателями постоянного тока применяются сравнительно редко и здесь не рассматриваются. То же самое относится и к системам синхронного вращения со вспомогательными синхронными машинами, которые не обеспечивают согласованного вращения главных электродвигателей в период пуска и торможения и поэтому применяются очень редко. Для примера рассмотрим систему синхронного вращения, состоящую (рис. 56, а) из двух главных электродвигателей Д1 и Д2 и двух вспомогательных асинхронных машин А1 и A2. Машина А1 насажена на вал главного электродвигателя Д1 а машина А2—на вал электродвигателя Д2. Главные электродвигатели могут быть удалены друг от друга на значительное расстояние, однако при любых нагрузках они должны вращаться с одинаковыми скоростями. Если главные электродвигатели Д1 и Д2 однотипны и имеют одинаковую нагрузку, то вращаются они с одинаковыми скоростями. Вспомогательные машины А1 и А2 тоже имеют при этом одинаковую скорость и никаких вращающих моментов не создают. Это объясняется тем, что обмотки роторов вспомогательных машин включены навстречу друг другу. Вследствие этого э. д. е., наводимые в каждой фазе ротора одной вспомогательной машины, уравновешиваются э. д. е., наводимыми в фазах ротора другой машины. Поэтому в обмотках роторов вспомогательных машин токи отсутствуют и никаких вращающих моментов машины не создают, т. В случае увеличения нагрузки, например, на электродвигатель Д1 скорость последнего начнет снижаться и между роторами вспомогательных машин А1 и А2 возникнет угол рассогласования. В результате э. д. с. их роторных обмоток уравновешиваться не будут и в них появятся уравнительные токи, что приведет к созданию дополнительных вращающих моментов, приложенных к валам I и II. Нетрудно доказать, что в рассматриваемом случае вспомогательная машина А1 будет потреблять электроэнергию из сети, а машина А2, наоборот, отдавать определенную часть электроэнергии в сеть. Это значит, что синхронизирующая машина Ах создает вращающий момент, совпадающий с направлением вращения вала I, а машина А2 создает момент, направленный навстречу вращению вала II. В рассмотренной схеме роторы синхронизирующих машин А1 и А2 вращаются в ту же сторону, что и магнитные поля их статоров, т. е. «по полю». Скольжения в этих случаях сравнительно невелики, поэтому нет оснований ожидать, что вспомогательные машины будут создавать большие синхронизирующие моменты. Действительно, величина э. д. с. роторной обмотки асинхронной машины зависит от скольжения. Чем меньше скольжение, тем меньше величины э. д. е., наводимой в обмотке ротора, и тем меньше уравнительные токи, протекающие между роторными обмотками вспомогательных машин при нарушении равновесия. По этой причине синхронизирующие моменты, создаваемые вспомогательными машинами А1 и А2, сравнительно невелики и при большей разности нагрузок между двигателями Д1 и Д2 вспомогательные машины, включенные по схеме, изображенной на рис. Схема «электрического вала» обеспечивает синхронное вращение главных электродвигателей не только при значительной разнице моментов статического сопротивления в установившихся электродвигательном и тормозных режимах работы, но и при переходных процессах (во время пусков и реверсов). Однако ее главным недостатком является большое количество электрических машин, что усложняет привод и увеличивает его стоимость. При небольшой разнице в нагрузках согласованное вращение асинхронных электродвигателей может быть достигнуто без использования вспомогательных синхронизирующих машин. Для этого главные электродвигатели Д1 и Д2 необходимо включать по схеме, показанной на рис. 57. Как и в предыдущих схемах, статорные обмотки электродвигателей питаются от общей сети трехфазного тока, а роторы включены навстречу друг другу и присоединены к реостату (для увеличения скольжения при различных нагрузках электродвигателей). Если из-за неравенства нагрузки один из роторов отстанет от другого, в проводах, соединяющих роторы, появится уравнительный ток, который создаст для более нагруженной машины дополнительный двигательный, а для менее нагруженной машины дополнительный тормозной момент. Последнее приведет к тому, что нагрузки на электродвигатели станут равными и они будут вращаться синхронно. Система синхронного вращения без вспомогательных машин отличается простотой, обеспечивает синхронное вращение главных электродвигателей в установившемся двигательном режиме и тормозном режиме противовключения. Однако величина синхронизирующего момента, как указывалось, зависит от величины э. д. с. ротора, а последняя, в свою очередь, от скольжения, при котором работает машина. Рассматриваемая система имеет и недостатки. При отключении электродвигателей от сети их синхронное вращение нарушается. Это приводит к тому, что при последующем пуске могут возникнуть недопустимо большие пусковые токи и моменты из-за возможного значительного угла рассогласования роторов. Для предотвращения этого схему приходится усложнять и она практически теряет все свои преимущества. Поэтому эта схема применяется сравнительно редко, хотя стоимость установки меньше предыдущей. |

 В качестве главных электродвигателей в схеме используются асинхронные короткозамкнутые электродвигатели. Роль же вспомогательных машин выполняют небольшие асинхронные электродвигатели с контактными кольцами; роторы вспомогательных машин, как показано на схеме, соединены встречно. Статорные обмотки всех четырех машин питаются от общей сети трехфазного тока.
В качестве главных электродвигателей в схеме используются асинхронные короткозамкнутые электродвигатели. Роль же вспомогательных машин выполняют небольшие асинхронные электродвигатели с контактными кольцами; роторы вспомогательных машин, как показано на схеме, соединены встречно. Статорные обмотки всех четырех машин питаются от общей сети трехфазного тока. е. главные электродвигатели, имея одинаковые механические характеристики, будут вращаться синхронно и без участия вспомогательных машин.
е. главные электродвигатели, имея одинаковые механические характеристики, будут вращаться синхронно и без участия вспомогательных машин. В результате нагрузки между главными электродвигателями Д1 и Д2 уравновесятся и скорость вращения их практически не изменится.
В результате нагрузки между главными электродвигателями Д1 и Д2 уравновесятся и скорость вращения их практически не изменится. 56, а, могут не обеспечить синхронного вращения валов I и II. Этим и объясняется сравнительно редкое использование на практике рассмотренной схемы. Значительно чаще применяется система синхронного вращения асинхронных электродвигателей со вспомогательными машинами, вращающимися «против поля» (рис. 56,б), получившая название «электрического вала». Эта схема работает практически так же, как и предыдущая. Разница состоит только в том, что здесь роторы вспомогательных машин А1 и А2 под действием главных электродвигателей Д1 и Д2 вращаются в сторону, противоположную направлению вращения магнитного поля статора. Поэтому при рассогласовании системы, когда нагрузки на двигатели Д1 и Д2 будут неодинаковы, вращающие моменты, создаваемые синхронизирующими машинами, будут значительно выше, чем в первом случае, а это обусловливает большую надежность схемы и согласованность вращения главных электродвигателей Д1 и Д2 практически при любых нагрузках.
56, а, могут не обеспечить синхронного вращения валов I и II. Этим и объясняется сравнительно редкое использование на практике рассмотренной схемы. Значительно чаще применяется система синхронного вращения асинхронных электродвигателей со вспомогательными машинами, вращающимися «против поля» (рис. 56,б), получившая название «электрического вала». Эта схема работает практически так же, как и предыдущая. Разница состоит только в том, что здесь роторы вспомогательных машин А1 и А2 под действием главных электродвигателей Д1 и Д2 вращаются в сторону, противоположную направлению вращения магнитного поля статора. Поэтому при рассогласовании системы, когда нагрузки на двигатели Д1 и Д2 будут неодинаковы, вращающие моменты, создаваемые синхронизирующими машинами, будут значительно выше, чем в первом случае, а это обусловливает большую надежность схемы и согласованность вращения главных электродвигателей Д1 и Д2 практически при любых нагрузках.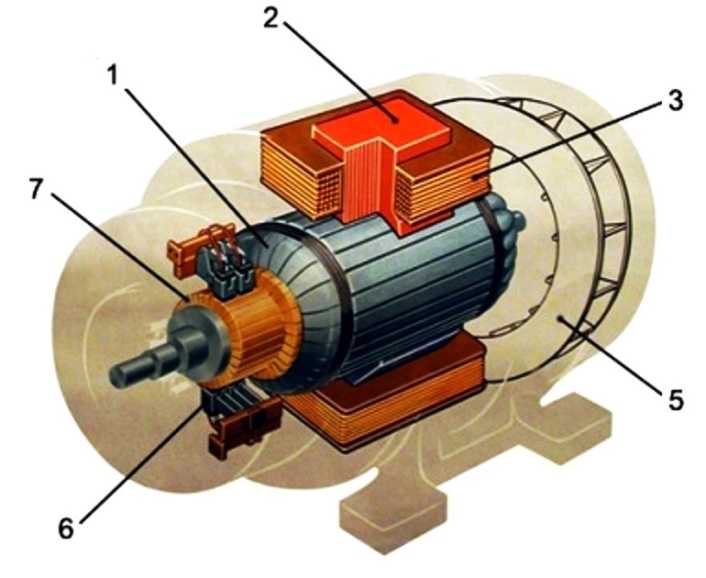
 Если электродвигатели Д1 и Д2 нагружены одинаково и вращаются строго синхронно, э. д. с., наводимые в роторных обмотках, равны по величине и направлены навстречу друг другу.
Если электродвигатели Д1 и Д2 нагружены одинаково и вращаются строго синхронно, э. д. с., наводимые в роторных обмотках, равны по величине и направлены навстречу друг другу. Поэтому при малых величинах скольжения синхронизирующий момент, создаваемый электродвигателями, будет мал, и электродвигатели, будучи выведены из состояния синхронной работы, вернуться в нее не смогут, так как даже при сравнительно небольшой разнице в моментах статического сопротивления (10—15%) скольжение должно быть не менее 20—25%. Поэтому чтобы электродвигатели вращались синхронно, необходимо искусственно увеличивать их скольжение введением дополнительных сопротивлений в роторные цепи, что приводит к увеличению потерь мощности.
Поэтому при малых величинах скольжения синхронизирующий момент, создаваемый электродвигателями, будет мал, и электродвигатели, будучи выведены из состояния синхронной работы, вернуться в нее не смогут, так как даже при сравнительно небольшой разнице в моментах статического сопротивления (10—15%) скольжение должно быть не менее 20—25%. Поэтому чтобы электродвигатели вращались синхронно, необходимо искусственно увеличивать их скольжение введением дополнительных сопротивлений в роторные цепи, что приводит к увеличению потерь мощности.
Направление вращения – так легко… ошибиться
Томаш Краус
Томаш Краус
Продвижение LV Motors и SIMOLOG ve společnosti Siemens
Опубликовано 18 сентября 2018 г.
+ Подписаться
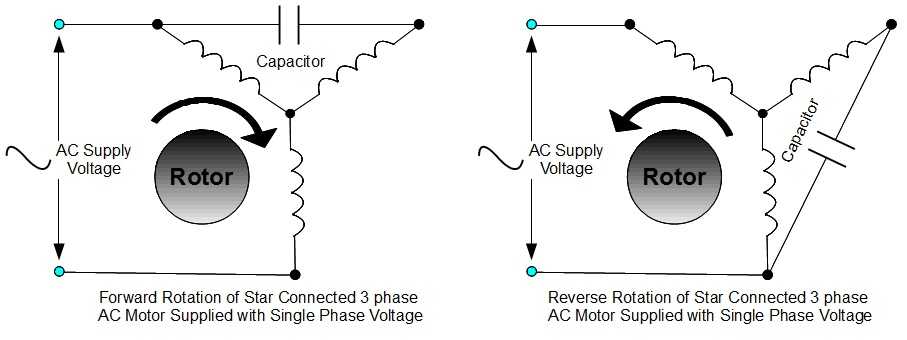
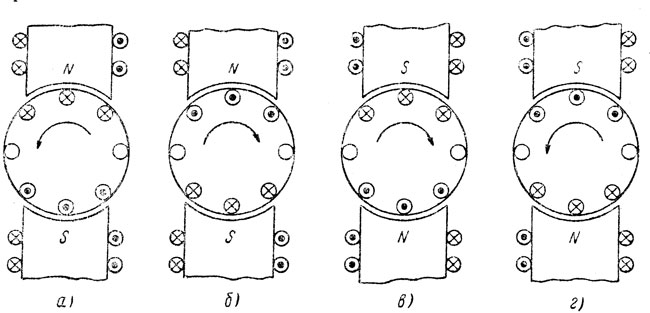
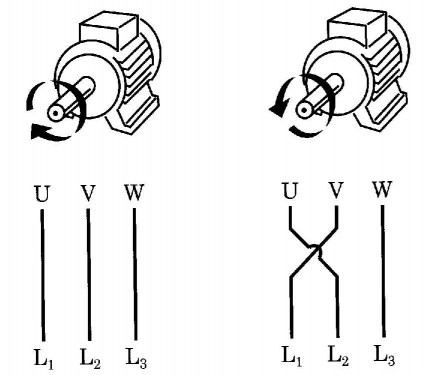
Электродвигатели рассчитаны либо на правое вращение, либо против часовой стрелки, либо на то и другое. Это очень просто. Стандарт IEC говорит, что направление вращения всегда рассматривается со стороны ведомого конца, где находится нагрузка. В нем также говорится, что при подключении фаз сети L1, L2, L3 к клеммам двигателя U, V, W в этом порядке двигатель должен вращаться по часовой стрелке. Если поменять местами пару фаз, она будет вращаться против часовой стрелки. Тем не менее все очень просто. Однако на удивление довольно часто случается, что мотор заказывают с неправильным направлением вращения.
Тем не менее все очень просто. Однако на удивление довольно часто случается, что мотор заказывают с неправильным направлением вращения.
Важным элементом, определяющим направление вращения, являются вентиляторы охлаждения. Если размер двигателя и номинальная скорость не слишком высоки, вентиляторы имеют прямые лопасти, а двигатель технически двунаправленный. Также двигатели с принудительным охлаждением, в которых охлаждающий вентилятор приводится в действие вспомогательным двигателем и вращается независимо от главного вала двигателя, обычно являются двунаправленными (но иногда также имеется встроенный на вал вентилятор для внутренней циркуляции воздуха, который не может быть сделан двусторонним). Если двигатель технически двунаправленный и вам нужно изменить направление вращения, это просто вопрос маркировки и документации.
Однако некоторые двигатели должны быть рассчитаны только на одно направление вращения – охлаждающие вентиляторы имеют наклонные лопасти, чтобы обеспечить достаточный охлаждающий эффект, а также обеспечить приемлемый уровень шума.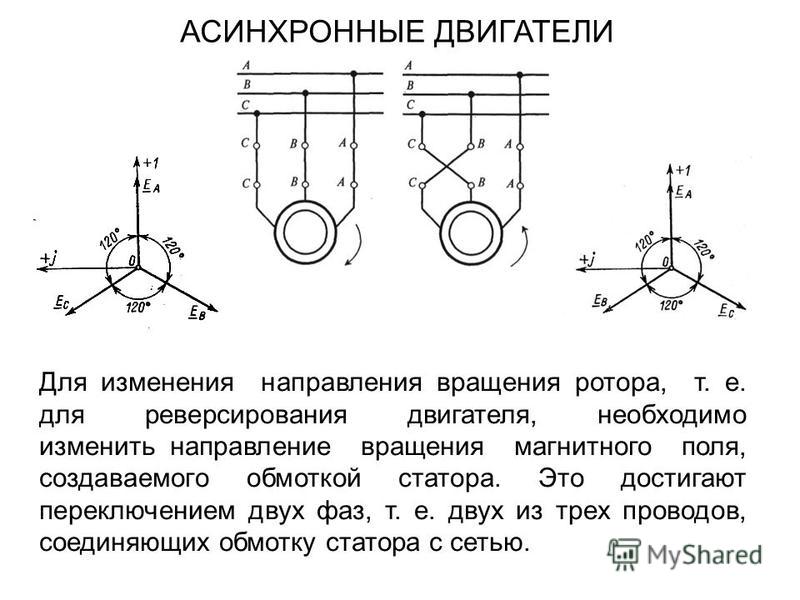 Такой двигатель может работать с обратным направлением вращения, но только с ограниченной мощностью на валу, что в большинстве случаев бесполезно для потребителя. Если двигатель заказан неправильно, мы не можем избежать замены охлаждающих вентиляторов. В более удачном случае ошибка обнаруживается уже после заказа, обычно когда завод предоставляет окончательные документы на согласование. Это приводит к заказу правильных вентиляторов, в худшем случае это вызывает некоторую задержку или вам нужно платить за неправильные вентиляторы, которые уже были запущены в производство.
Такой двигатель может работать с обратным направлением вращения, но только с ограниченной мощностью на валу, что в большинстве случаев бесполезно для потребителя. Если двигатель заказан неправильно, мы не можем избежать замены охлаждающих вентиляторов. В более удачном случае ошибка обнаруживается уже после заказа, обычно когда завод предоставляет окончательные документы на согласование. Это приводит к заказу правильных вентиляторов, в худшем случае это вызывает некоторую задержку или вам нужно платить за неправильные вентиляторы, которые уже были запущены в производство.
Однако чаще ошибка выявляется уже после доставки, когда покупатель распаковывает двигатель и кто-то обнаруживает, что стрелка указывает в другую сторону. Для более крупных двигателей поставщики обычно не держат на складе охлаждающие вентиляторы, так как существует большое разнообразие размеров, материалов… а также два направления вращения. Итак, сначала вам нужно изготовить новые вентиляторы, затем доставить их (что также может занять некоторое время, особенно если ваш завод находится на другом континенте, чем конечный потребитель) и заменить их. При наличии внутреннего вентилятора, расположенного между корпусом ротора и подшипником, необходимо демонтировать ротор, что может быть невозможно на месте. Подшипники могут быть повреждены, и вам может потребоваться купить новые. Если двигатель работает во взрывоопасных зонах, работа должна выполняться сертифицированной сервисной мастерской. Никто не будет счастлив.
При наличии внутреннего вентилятора, расположенного между корпусом ротора и подшипником, необходимо демонтировать ротор, что может быть невозможно на месте. Подшипники могут быть повреждены, и вам может потребоваться купить новые. Если двигатель работает во взрывоопасных зонах, работа должна выполняться сертифицированной сервисной мастерской. Никто не будет счастлив.
Несмотря на то, что каждый может себе представить, что изменение направления вращения после родов действительно проблематично, почему это происходит так часто? Кто-то говорит, что заказчик может ошибиться, так как направление вращения ведомой машины также считается, если смотреть со стороны ведомого конца – поэтому, когда они производят насос с правым вращением, им нужно покупать двигатель с вращением против часовой стрелки. На мой взгляд это не главная причина. Я бы сказал, что правильные люди не проверяют правильные вещи в нужное время. Когда заказчик и производитель охотятся за заказом, наиболее важным является согласование характеристик двигателя, цены, сроков поставки и других коммерческих тем. Направление вращения ни на что из этого не влияет. Это параметр, который был установлен (разумеется, правильно) уже в прошлом. Либо что-то нужно установить «на стадии заказа», но иногда эта информация не доходит до производства.
Направление вращения ни на что из этого не влияет. Это параметр, который был установлен (разумеется, правильно) уже в прошлом. Либо что-то нужно установить «на стадии заказа», но иногда эта информация не доходит до производства.
Я лично принимал участие в испытании заказчиком нескольких двигателей среднего напряжения, которое длилось целых два дня на нашем заводе. Вместе с нашим руководителем проекта и двумя людьми из компании-подрядчика мы все подписали, что испытания прошли успешно, в том числе все двигатели имеют правое вращение, в соответствии с заказом и окончательной документацией. После их доставки заказчику, не присутствовавшему на заводских приемо-сдаточных испытаниях, было замечено, что все они должны были быть против часовой стрелки. Мы обнаружили техпаспорт насоса, показывающий вращение насоса по часовой стрелке где-то на пятой странице, отправленный 10 месяцев назад с первым запросом, полученным моим коллегой, который тем временем покинул нашу компанию. Хуже всего было не то, что заказчик отказался покрыть какую-либо часть стоимости замены охлаждающих вентиляторов, хотя он явно невнимательно прочитал окончательную документацию, отчеты об испытаниях и сообщение о заводских приемочных испытаниях. Хуже всего, конечно, весь напряженный процесс покупки новых вентиляторов, планирования работы по замене и выслушивания жалоб на задержку ввода в эксплуатацию. Кроме того, в стране назначения обычно все документы пересылаются и официально утверждаются на нескольких уровнях, включая правительство, поэтому вполне вероятно, что обновленные файлы не могут пройти везде, и кто-то все еще может хранить документы с истекшим сроком действия.
Хуже всего, конечно, весь напряженный процесс покупки новых вентиляторов, планирования работы по замене и выслушивания жалоб на задержку ввода в эксплуатацию. Кроме того, в стране назначения обычно все документы пересылаются и официально утверждаются на нескольких уровнях, включая правительство, поэтому вполне вероятно, что обновленные файлы не могут пройти везде, и кто-то все еще может хранить документы с истекшим сроком действия.
Вероятно, нет эффективного способа полностью избавиться от этих ошибок. Производители могут более наглядно отмечать направление вращения в итоговых документах, а заказчики могут четко указывать его в каждом заказе. Также производитель может насолить заказчику и поставить это как точку приостановки — мы не начнем производство вашего мотора, пока вы официально не подтвердите направление вращения. Но все же есть риск, что кто-то не владеет верной информацией, и неверный приказ будет одобрен всеми сторонами.
Учитывая количество больших однонаправленных двигателей, проданных по всему миру, возможно, пока вы читали эту статью, кто-то распаковал новый двигатель после доставки и. .. «О боже, эта стрелка указывает в правильном направлении?»
.. «О боже, эта стрелка указывает в правильном направлении?»
Другие также смотрели
Исследуйте темы
Определение направления вращения двигателя | ЭЦиМ
Вы только что отремонтировали двигатель или приобрели замену и собираетесь его подключить. Какую критическую задачу необходимо выполнить для правильной работы подключенной нагрузки двигателя? Правильно: определение правильного вращения двигателя.
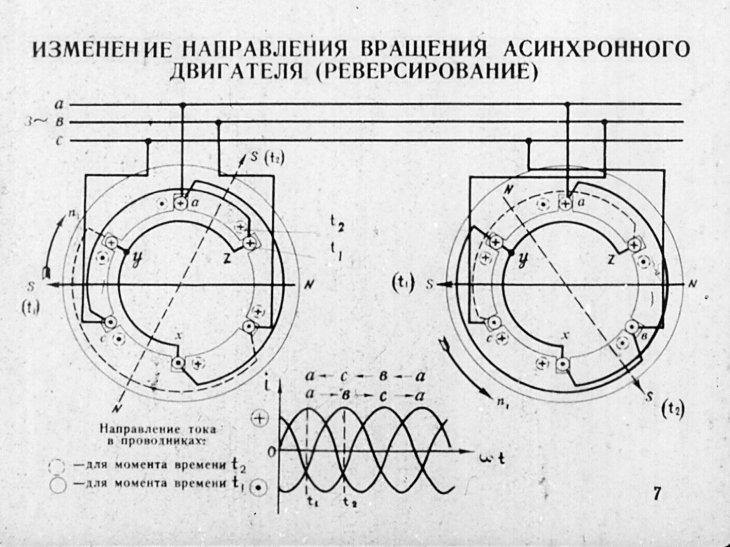
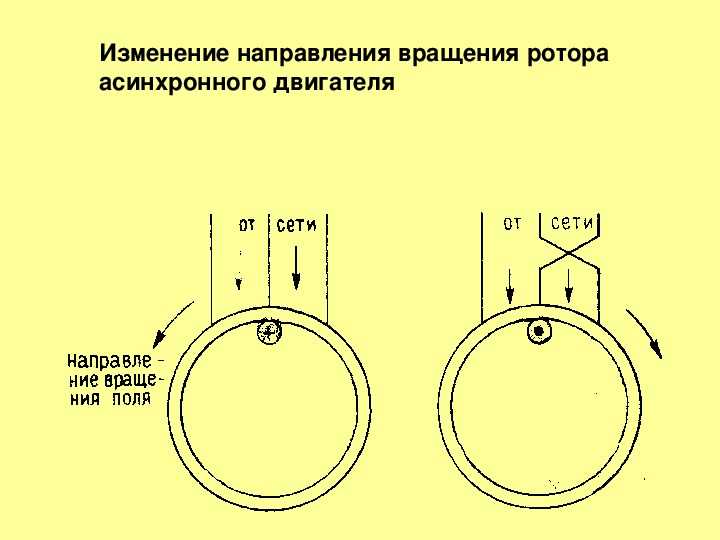
Все мы знаем, что направление вращения трехфазного двигателя можно изменить, поменяв местами два вывода его статора. Это переключение, если хотите, меняет направление вращающегося магнитного поля внутри двигателя.
Если мы знаем, что на подключенную нагрузку не повлияет обратное вращение двигателя, мы можем временно включить двигатель и наблюдать за направлением его вращения. Если это неправильное направление, мы можем просто поменять местами любые два провода.
Но что делать, если подключенная нагрузка будет повреждена при обратном вращении двигателя? Мы должны определить правильное вращение, прежде чем двигатель будет подключен к нагрузке. Мы можем временно включить двигатель, пока он не связан с нагрузкой, и наблюдать за направлением его вращения. И, после замены проводов, при необходимости, двигатель можно подключить к нагрузке. Есть и другой вариант, менее затратный по времени и более эффективный.
Использование измерителя чередования фаз
Измеритель чередования фаз с помощью шести выводов сравнивает чередование фаз двух разных трехфазных соединений. Три провода, обозначенные буквами «А», «В» и «С», подсоединены к стороне тестового блока, обозначенной «МОТОР». Три других провода помечены так же, но подключены к другой стороне тестового блока, которая помечена как «LINE». Измеритель также имеет вольтметр с нулевым центром, одна сторона которого помечена как «НЕПРАВИЛЬНО», а другая — как «ПРАВИЛЬНО».
Во-первых, вы «обнуляете» счетчик в соответствии с инструкциями производителя. Затем вы устанавливаете селекторный переключатель измерителя в положение «MOTOR» и подсоединяете три провода MOTOR к проводам двигателя. Наконец, вы вручную поворачиваете вал двигателя в нужном направлении, наблюдая за вольтметром, который сразу же качается в ПРАВИЛЬНОМ или НЕПРАВИЛЬНОМ направлении. Особое примечание: хотя стрелка будет качаться в противоположном направлении после того, как вал перестанет вращаться, вы должны использовать первую индикацию вольтметра в отношении состояния направления вращения.
Затем вы устанавливаете селекторный переключатель измерителя в положение «MOTOR» и подсоединяете три провода MOTOR к проводам двигателя. Наконец, вы вручную поворачиваете вал двигателя в нужном направлении, наблюдая за вольтметром, который сразу же качается в ПРАВИЛЬНОМ или НЕПРАВИЛЬНОМ направлении. Особое примечание: хотя стрелка будет качаться в противоположном направлении после того, как вал перестанет вращаться, вы должны использовать первую индикацию вольтметра в отношении состояния направления вращения.
Если вам повезло и первая конфигурация соединения правильная, вы помечаете выводы двигателя «A», «B» и «C», чтобы они совпадали с подключенными выводами измерителя чередования фаз.
Предположим, вам не повезло, и вольтметр показывает НЕПРАВИЛЬНО. Затем вы должны поменять местами любые два провода ДВИГАТЕЛЯ и снова вручную повернуть вал двигателя. Теперь вольтметр должен показывать ПРАВИЛЬНО, и вы должны пометить выводы двигателя «A», «B» и «C», чтобы они совпадали с подключенными выводами измерителя чередования фаз. Однако вы еще не закончили с установкой двигателя.
Однако вы еще не закончили с установкой двигателя.
Определение поворота линии источника питания
Теперь вы должны проверить вращение линии, подающей питание на двигатель. Здесь также можно использовать ваш измеритель вращения фаз.
После обесточивания фидера питания двигателя и применения необходимых устройств блокировки/маркировки вы устанавливаете селекторный переключатель агрегата в положение «LINE» и подсоединяете три провода LINE к фидеру. Затем включите фидер и посмотрите на вольтметр.
Если вам снова повезло, и вольтметр показывает ПРАВИЛЬНО, вы маркируете выводы фидера питания «A», «B» и «C» после того, как фидер обесточен и снова установлены устройства блокировки/маркировки, чтобы они совпадали с подключенными LINE ведет от измерителя чередования фаз.
Если вам снова не повезло, вы обесточиваете фидер питания двигателя и применяете необходимые устройства блокировки / маркировки, а также меняете местами любые два провода LINE. При повторном включении фидера вольтметр покажет ПРАВИЛЬНО. Теперь вы можете пометить фидерные проводники «A», «B» и «C», чтобы они совпадали с подключенными проводами LINE от измерителя чередования фаз.
Теперь вы можете пометить фидерные проводники «A», «B» и «C», чтобы они совпадали с подключенными проводами LINE от измерителя чередования фаз.
Все, что осталось сделать, это сопоставить маркированные выводы двигателя с маркированными проводниками фидера питания и выполнить необходимые соединения. Двигатель будет работать с правильным вращением.
Другое приложение для измерения чередования фаз
Так же, как мы проверили вращение двигателя и его источника питания, мы можем сделать то же самое для двух отдельных источников питания. Предположим, вы построили временную сеть с устройствами защиты от перегрузки по току при замене существующего распределительного щита или щита. Очевидно, что временная ротация мощности должна быть такой же, как и у существующей службы, чтобы любые подключенные двигатели работали в правильном направлении.
Выполнив все требования по блокировке/маркировке, вы сначала подключаете провода LINE измерителя чередования фаз к стороне нагрузки существующего сервисного переключателя, который находится в разомкнутом положении. Затем при закрытом приборе проверяешь вольтметр измерителя чередования фаз. Если он показывает ПРАВИЛЬНО, установите устройство отключения обслуживания в открытое положение и пометьте проводники стороны нагрузки, чтобы они совпадали с подключенными проводами ЛИНИИ от измерителя чередования фаз. Если вольтметр показывает НЕПРАВИЛЬНО, поменяйте местами два провода LINE и сделайте соответствующую маркировку на проводниках со стороны нагрузки.
Затем при закрытом приборе проверяешь вольтметр измерителя чередования фаз. Если он показывает ПРАВИЛЬНО, установите устройство отключения обслуживания в открытое положение и пометьте проводники стороны нагрузки, чтобы они совпадали с подключенными проводами ЛИНИИ от измерителя чередования фаз. Если вольтметр показывает НЕПРАВИЛЬНО, поменяйте местами два провода LINE и сделайте соответствующую маркировку на проводниках со стороны нагрузки.
Затем, прежде чем подключать временную услугу к существующей нагрузке, вы подключаете провода LINE измерителя чередования фаз к стороне линии временной услуги. Когда временный сервисный разъединитель находится в разомкнутом положении, замкните существующий сервисный разъединитель и посмотрите на показания вольтметра. Если он читает ПРАВИЛЬНО, пометьте временные выводы линии обслуживания, чтобы они совпадали с подсоединенными выводами LINE от измерителя чередования фаз. Если вольтметр показывает НЕПРАВИЛЬНО, поменяйте местами любые два провода LINE и сделайте соответствующую маркировку.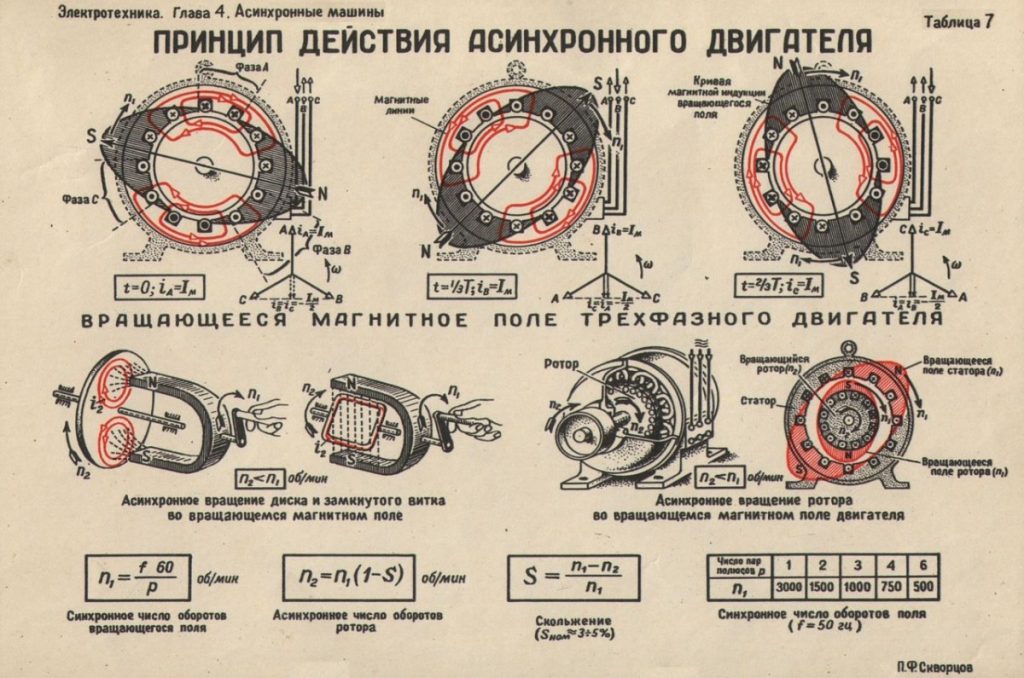
Двигатели с датчиками вращения — документация pybricks v3.1.0
Рисунок 2. Двигатели с датчиками вращения. Стрелки указывают на значение по умолчанию
положительное направление. См. модуль концентраторов по умолчанию.
направления встроенных двигателей.
- класс Двигатель ( порт , Positive_direction=Направление. ПО ЧАСОВОЙ СТРЕЛКЕ , шестерни=Нет , reset_angle=Истина )
Общий класс для управления двигателями со встроенными датчиками вращения.
- Параметры
порт ( порт ) — порт к которому подключен двигатель.
Positive_direction ( Direction ) – В каком направлении должен вращаться двигатель поверните, когда вы даете положительное значение скорости или угол.
шестерни ( список ) –
Список шестерен, связанных с двигателем.
Например:
[12, 36]представляет зубчатую передачу с Шестерни с 12 и 36 зубьями. Используйте список списков для нескольких зубчатые передачи, такие как[[12, 36], [20, 16, 40]].При указании зубчатой передачи все команды и настройки двигателя автоматически корректируются с учетом результирующей передачи соотношение. При этом направление двигателя остается неизменным.
reset_angle ( bool ) — выберите
True, чтобы сбросить значение датчика вращения до абсолютный угол маркера (между -180 и 179). ВыберитеFalse, чтобы сохранить текущее значение, поэтому ваша программа знает, где она остановилась в последний раз время.
Измерение
- скорость()
Получает скорость двигателя.
- Возвращает
Скорость двигателя.
- Тип возврата
скорость вращения: град/с
- угол ()
Получает угол поворота двигателя.
- Возвращает
Угол двигателя.
- Тип возврата
угол: град
- reset_angle( угол=Нет )
Устанавливает накопленный угол поворота двигателя на желаемое значение.
Если угол не указан, абсолютный угол будет использоваться, если ваш двигатель поддерживает его.
- Параметры
угол (угол: град) – значение, до которого необходимо сбросить угол.
Остановка
- стоп()
Останавливает двигатель и позволяет ему свободно вращаться.
Двигатель постепенно останавливается из-за трения.
- тормоз()
Пассивно тормозит двигатель.
Двигатель останавливается из-за трения плюс напряжение, которое генерируется, когда двигатель все еще движется.
- удерживать()
Останавливает двигатель и активно удерживает его на текущем угле.
Действие
- бег( скорость )
Двигатель работает с постоянной скоростью.
Двигатель разгоняется до заданной скорости и продолжает работать на этой скорость, пока вы не дадите новую команду.
- Параметры
скорость (скорость вращения: град/с) – скорость двигателя.
- run_time( скорость , время , then=Stop.HOLD , ожидание=True )
Запуск двигателя с постоянной скоростью в течение заданного времени.
Двигатель разгоняется до заданной скорости, продолжает работать на этой скорости, а потом тормозит. Суммарный маневр длится ровно заданное сумма
раз.- Параметры
скорость (скорость вращения: град/с) – скорость двигателя.
время (время: мс) – продолжительность маневра.
, затем ( Стоп ) – Что делать после остановки.
ожидание ( bool ) — дождитесь завершения маневра, прежде чем продолжить с остальной частью программы.
- run_angle( скорость , вращение_угол , then=Stop.HOLD , wait=True )
Запускает двигатель с постоянной скоростью на заданный угол.
- Параметры
скорость (скорость вращения: град/с) – скорость двигателя.
rotate_angle (угол: град) – Угол, на который должен вращать.
затем ( Стоп ) – Что делать после остановки.
ожидание ( bool ) — дождитесь завершения маневра, прежде чем продолжить с остальной частью программы.
- run_target( скорость , target_angle , then=Stop.HOLD , wait=True )
Двигатель работает с постоянной скоростью в направлении заданный угол цели.
Направление вращения выбирается автоматически в зависимости от цели угол. Не имеет значения, является ли
скоростьположительной или отрицательной.- Параметры
скорость (скорость вращения: град/с) – скорость двигателя.
target_angle (угол: градусы) – угол, под которым двигатель должен повернуть к.
затем ( Стоп ) – Что делать после остановки.
ожидание ( bool ) — Подождите, пока двигатель достигнет цели прежде чем продолжить с остальными программа.
- track_target( target_angle )
Отслеживает целевой угол. Это похоже на
run_target(), но обычный плавный разгон пропущен: он будет двигаться к цели угол как можно быстрее. Этот метод полезен, если вы хотите постоянно меняйте угол цели.- Параметры
target_angle (угол: градусы) – Целевой угол, который двигатель должен повернуть к.
- run_until_stalled( скорость , then=Stop.COAST , duty_limit=None )
Двигатель работает с постоянной скоростью, пока не остановится.
- Параметры
скорость (скорость вращения: град/с) – скорость двигателя.
затем ( Стоп ) – Что делать после остановки.
duty_limit (в процентах: %) — предел рабочего цикла в течение этого команда. Это полезно, чтобы избежать использования полного двигателя. крутящего момента к редукторному или рычажному механизму.
- Возвращает
Угол, при котором двигатель глохнет.
- Тип возврата
угол: град
- постоянный ток( долг )
Вращает двигатель с заданным рабочим циклом (также известным как «мощность»).
Этот метод позволяет использовать двигатель как обычный двигатель постоянного тока.
- Параметры
Duty (в процентах: %) – рабочий цикл (от -100,0 до 100).
Состояние двигателя
- контроль.шкала
Количество градусов, на которое двигатель поворачивается, чтобы завершить один градус выход зубчатой передачи. Это передаточное отношение, определяемое
gearsаргумент при инициализации мотора.
- управление.готово()
Проверяет выполнение текущей команды или маневра.
- Возвращает
Истина, если команда выполнена,Ложь, если нет.- Тип возврата
логический
- control.stalled()
Проверяет, остановлен ли контроллер в данный момент.
Контроллер останавливается, когда не может достичь заданной скорости или положение даже при максимальном сигнале срабатывания.
- Возвращает
Истина, если контроллер завис,Ложь, если нет.- Тип возврата
логический
- control.load()
Оценивает нагрузку на основе крутящего момента, необходимого для поддержания заданную скорость или угол.
При движении накатом, торможении или управлении рабочим циклом вручную нагрузка не может быть оценена таким образом. Тогда этот метод возвращает ноль.
- Возвращает
Момент нагрузки. Возвращает 0, если управление не активен.
- Тип возврата
крутящий момент: мНм
Настройки двигателя
Вы можете изменить эти настройки, только когда контроллер остановлен. За например, вы можете изменить их в начале вашей программы. Альтернативно, сначала вызовите
stop(), а затем измените настройки.- настройки ( макс_напряжение )
Настройка параметров двигателя.
Если аргументы не указаны,
это возвращает текущие значения.- Параметры
max_voltage (напряжение: мВ) — максимальное напряжение, подаваемое на двигатель во время всех команд двигателя.
- control.limits( скорость , ускорение , крутящий момент )
Конфигурирует максимальную скорость, ускорение, режим работы и крутящий момент.
Если аргументы не указаны, будут возвращены текущие значения.
- Параметры
скорость (скорость вращения: град/с или скорость: мм/с) — максимальная скорость. Все команды скорости будут ограничены этим значением.
ускорение (ускорение вращения: град/с/с или линейное ускорение: мм/с/с) — максимальное ускорение.
крутящий момент (крутящий момент: мНм) — максимальный крутящий момент обратной связи во время управления.
- control.pid( kp , ki , kd , зарезервировано , интегральная_скорость )
Получает или задает значения ПИД-регулятора для управления положением и скоростью.
Если аргументы не указаны, будут возвращены текущие значения.
- Параметры
kp ( int ) – Пропорциональное управление положением постоянный. Это крутящий момент обратной связи на градус погрешность: мкНм/град.
ki ( int ) – Интегральная константа управления положением. это обратная связь крутящий момент на накопленную степень погрешности: мкНм/(град с).
kd ( int ) – Производное положение (или пропорциональная скорость) управление постоянный. Это крутящий момент обратной связи на единица скорости: мкНм/(град/с).
зарезервировано – этот параметр не используется.
Integer_rate (скорость вращения: град/с или скорость: мм/с) – Максимальная скорость при при котором допускается рост интеграла ошибки.
- control.target_tolerances( скорость , положение )
Получает или задает допуски, говорящие о выполнении маневра.
Если аргументы не указаны, будут возвращены текущие значения.
- Параметры
скорость (скорость вращения: град/с или скорость: мм/с) – Допустимое отклонение от нулевой скорости до того, как движение будет считаться завершенным.
позиция (угол: град или расстояние: мм) – разрешено отклонение от цели до рассмотрения движения полный.
- control.stall_tolerances( скорость , время )
Получает или задает допуски остановки.
Если аргументы не указаны, будут возвращены текущие значения.
- Параметры
скорость (скорость вращения: град/с или скорость: мм/с) – Если контроллер не может достичь этой скорости какое-то время
время (время: мс) – как долго контроллер должен быть ниже этого минимальная скорость





 Если аргументы не указаны,
это возвращает текущие значения.
Если аргументы не указаны,
это возвращает текущие значения.
Примеры инициализации
Движение двигателя вперед и назад
из pybricks.pupdevices import Motor из порта импорта pybricks.parameters из pybricks.tools импорт ждать # Инициализировать мотор на порту А. example_motor = Двигатель (Порт.A) # Заставьте двигатель вращаться по часовой стрелке со скоростью 500 градусов в секунду. example_motor.run(500) # Подождите три секунды. подожди(3000) # Заставьте двигатель вращаться против часовой стрелки со скоростью 500 градусов в секунду. example_motor.
 run(-500)
# Подождите три секунды.
подожди(3000)
run(-500)
# Подождите три секунды.
подожди(3000)
Инициализация нескольких двигателей
из pybricks.pupdevices import Motor из порта импорта pybricks.parameters из pybricks.tools импорт ждать # Инициализировать двигатели на портах A и B. track_motor = Двигатель (Порт.A) Gripper_motor = Двигатель (Порт.B) # Заставьте оба двигателя работать со скоростью 500 градусов в секунду. track_motor.run(500) Gripper_motor.run(500) # Подождите три секунды. подожди(3000)
Установка положительного направления против часовой стрелки
из pybricks.pupdevices import Motor из pybricks.parameters импортировать порт, направление из pybricks.tools импорт ждать # Инициализируйте двигатель на порте A с положительным направлением против часовой стрелки. example_motor = Двигатель (Порт.A, Направление.ПРОТИВ ЧАСОВОЙ СТРЕЛКИ) # Когда мы выбираем положительное значение скорости, двигатель теперь вращается против часовой стрелки. example_motor.run(500) # Это полезно, когда ваш двигатель установлен в обратном направлении или вверх ногами.
 # Изменив положительное направление, ваш сценарий будет легче читать,
# потому что теперь положительное значение заставляет вашего робота/механизм двигаться вперед.
# Подождите три секунды.
подожди(3000)
# Изменив положительное направление, ваш сценарий будет легче читать,
# потому что теперь положительное значение заставляет вашего робота/механизм двигаться вперед.
# Подождите три секунды.
подожди(3000)
Использование шестерен
из pybricks.pupdevices import Motor из pybricks.parameters импортировать порт, направление из pybricks.tools импорт ждать # Инициализируйте двигатель на порте A с положительным направлением против часовой стрелки. # Также укажите одну зубчатую передачу с 12-зубчатой и 36-зубчатой шестернями. 12-зубый # Шестерня прикреплена к оси двигателя. Шестерня с 36 зубьями находится на выходной оси. geared_motor = Двигатель (Порт.A, Направление.ПРОТИВ ЧАСОВОЙ СТРЕЛКИ, [12, 36]) # Заставьте выходную ось вращаться со скоростью 100 градусов в секунду. Скорость двигателя # автоматически увеличивается, чтобы компенсировать шестерни. geared_motor.run(100) # Подождите три секунды. подожди(3000)
Примеры измерений
Измерение угла и скорости
из pybricks.
 pupdevices import Motor
из порта импорта pybricks.parameters
из pybricks.tools импорт ждать
# Инициализировать мотор на порту А.
example_motor = Двигатель (Порт.A)
# Начните двигаться со скоростью 300 градусов в секунду.
example_motor.run(300)
# Отображение угла и скорости 50 раз.
для i в диапазоне (100):
# Прочтите угол (градусы) и скорость (градусы в секунду).
угол = пример_мотора.угол()
скорость = пример_мотора.скорость()
# Распечатать значения.
печать (угол, скорость)
# Подождите некоторое время, чтобы мы могли прочитать то, что отображается.
подожди(200)
pupdevices import Motor
из порта импорта pybricks.parameters
из pybricks.tools импорт ждать
# Инициализировать мотор на порту А.
example_motor = Двигатель (Порт.A)
# Начните двигаться со скоростью 300 градусов в секунду.
example_motor.run(300)
# Отображение угла и скорости 50 раз.
для i в диапазоне (100):
# Прочтите угол (градусы) и скорость (градусы в секунду).
угол = пример_мотора.угол()
скорость = пример_мотора.скорость()
# Распечатать значения.
печать (угол, скорость)
# Подождите некоторое время, чтобы мы могли прочитать то, что отображается.
подожди(200)
Сброс измеренного угла
из pybricks.pupdevices import Motor из порта импорта pybricks.parameters # Инициализировать мотор на порту А. example_motor = Двигатель (Порт.A) # Сбросить угол до 0. example_motor.reset_angle (0) # Сбросить угол до 1234. example_motor.reset_angle(1234) # Сбросить угол до абсолютного угла. # Поддерживается только на двигателях с # абсолютный энкодер. Для других двигателей это # вызовет ошибку.
 example_motor.reset_angle()
example_motor.reset_angle()
Примеры движения
Основное использование всех методов запуска
из pybricks.pupdevices import Motor
из порта импорта pybricks.parameters
из pybricks.tools импорт ждать
# Инициализировать мотор на порту А.
example_motor = Двигатель (Порт.A)
# Запустите на скорости 500 град/с, а затем остановитесь накатом.
print("Демонстрация запуска")
example_motor.run(500)
подожди(1500)
example_motor.stop()
подожди(1500)
# Работайте с рабочим циклом 70% («мощность»), а затем останавливайтесь выбегом.
print("Демонстрация постоянного тока")
example_motor.dc(50)
подожди(1500)
example_motor.stop()
подожди(1500)
# Прогон со скоростью 500 град/с в течение двух секунд.
print("Демонстрация run_time")
example_motor.run_time(500, 2000)
подожди(1500)
# Прогон со скоростью 500 град/с в течение 90 градусов.
print("Демонстрация run_angle")
example_motor.run_angle (500, 90)
подожди(1500)
# Бежим со скоростью 500 град/с назад к нулевому углу
print("Демонстрация run_target до 0")
example_motor. run_target(500, 0)
подожди(1500)
# Пробежать со скоростью 500 град/с обратно до угла -90
print("Демонстрация run_target до -90")
example_motor.run_target(500, -90)
подожди(1500)
# Работаем со скоростью 500 град/с, пока двигатель не заглохнет
print("Демонстрация run_until_stalled")
example_motor.run_until_stalled(500)
распечатать("Готово")
подожди(1500)
 run_target(500, 0)
подожди(1500)
# Пробежать со скоростью 500 град/с обратно до угла -90
print("Демонстрация run_target до -90")
example_motor.run_target(500, -90)
подожди(1500)
# Работаем со скоростью 500 град/с, пока двигатель не заглохнет
print("Демонстрация run_until_stalled")
example_motor.run_until_stalled(500)
распечатать("Готово")
подожди(1500)
run_target(500, 0)
подожди(1500)
# Пробежать со скоростью 500 град/с обратно до угла -90
print("Демонстрация run_target до -90")
example_motor.run_target(500, -90)
подожди(1500)
# Работаем со скоростью 500 град/с, пока двигатель не заглохнет
print("Демонстрация run_until_stalled")
example_motor.run_until_stalled(500)
распечатать("Готово")
подожди(1500)
Различные способы остановки текущих движений
из импорта pybricks.pupdevices Мотор из порта импорта pybricks.parameters из pybricks.tools импорт ждать # Инициализировать мотор на порту А. example_motor = Двигатель (Порт.A) # Запустите на скорости 500 град/с, а затем остановитесь накатом. example_motor.run(500) подожди(1500) example_motor.stop() подожди(1500) # Запустите со скоростью 500 град/с и затем остановитесь, затормозив. example_motor.run(500) подожди(1500) example_motor.тормоз() подожди(1500) # Запустите на скорости 500 град/с и затем остановитесь, удерживая кнопку. example_motor.run(500) подожди(1500) example_motor.
 hold()
подожди(1500)
# Запустите со скоростью 500 град/с, а затем остановитесь, запустив нулевую скорость.
example_motor.run(500)
подожди(1500)
example_motor.run(0)
подожди(1500)
hold()
подожди(1500)
# Запустите со скоростью 500 град/с, а затем остановитесь, запустив нулевую скорость.
example_motor.run(500)
подожди(1500)
example_motor.run(0)
подожди(1500)
Использование аргумента
, а затем для изменения способа остановки команды запускаиз pybricks.pupdevices import Motor из pybricks.parameters импортировать порт, стоп из pybricks.tools импорт ждать # Инициализировать мотор на порту А. example_motor = Двигатель (Порт.A) # По умолчанию мотор удерживает положение. Он держит # исправление угла при перемещении. example_motor.run_angle (500, 360) подожди(1000) # Делает то же самое, что и выше. example_motor.run_angle(500, 360, затем=Stop.HOLD) подожди(1000) # Вы также можете тормозить. Это оказывает некоторое сопротивление # но двигатель не двигается назад, если вы его двигаете. example_motor.run_angle(500, 360, затем=Stop.BRAKE) подожди(1000) # Это позволяет двигателю свободно двигаться по инерции после остановки. example_motor.
 run_angle(500, 360, затем=Stop.COAST)
подожди(1000)
run_angle(500, 360, затем=Stop.COAST)
подожди(1000)
Примеры остановки
Запуск двигателя до механической конечной точки
из pybricks.pupdevices import Motor из порта импорта pybricks.parameters # Инициализировать мотор на порту А. example_motor = Двигатель (Порт.A) # Мы будем использовать скорость 200 град/с во всех наших командах. скорость = 200 # Запустите двигатель в обратном направлении, пока он не упрется в механический упор. # Настройка duty_limit=30 означает, что будет применяться только 30% # максимального крутящего момента относительно механического упора. Сюда, # вы не давите на него слишком сильно. example_motor.run_until_stalled(-скорость, duty_limit=30) # Сбросить угол до 0. Теперь, когда угол равен 0, вы знаете, # что он достиг механической конечной точки. example_motor.reset_angle (0) # Теперь заставьте двигатель двигаться вперед и назад по петле. # Теперь это будет работать одинаково независимо от # начальный угол двигателя, потому что мы всегда запускаем # от механической конечной точки.
 для количества в диапазоне (10):
example_motor.run_target (скорость, 180)
example_motor.run_target (скорость, 90)
для количества в диапазоне (10):
example_motor.run_target (скорость, 180)
example_motor.run_target (скорость, 90)
Центровка рулевого механизма
от pybricks.pupdevices импорт Мотор из порта импорта pybricks.parameters # Инициализировать мотор на порту А. example_motor = Двигатель (Порт.A) # Мы будем использовать скорость 200 град/с во всех наших командах. скорость = 200 # Запустите двигатель в обратном направлении, пока он не упрется в механический упор. # Настройка duty_limit=30 означает, что будет применяться только 30% # максимального крутящего момента относительно механического упора. Сюда, # вы не давите на него слишком сильно. example_motor.run_until_stalled(-скорость, duty_limit=30) # Сбросить угол до 0. Теперь, когда угол равен 0, вы знаете, # что он достиг механической конечной точки. example_motor.reset_angle (0) # Теперь заставьте двигатель двигаться вперед и назад по петле. # Теперь это будет работать одинаково независимо от # начальный угол двигателя, потому что мы всегда запускаем # от механической конечной точки.
 для количества в диапазоне (10):
example_motor.run_target (скорость, 180)
example_motor.run_target (скорость, 90)
для количества в диапазоне (10):
example_motor.run_target (скорость, 180)
example_motor.run_target (скорость, 90)
Примеры параллельного движения
Использование аргумента
wait для параллельного запуска двигателейиз pybricks.pupdevices import Motor из порта импорта pybricks.parameters # Инициализировать двигатели на портах A и B. track_motor = Двигатель (Порт.A) Gripper_motor = Двигатель (Порт.B) # Заставьте двигатель гусеницы начать движение, # но не дожидайтесь окончания. track_motor.run_angle(500, 360, ожидание=ложь) # Теперь заставьте двигатель захвата вращаться. Этот # означает, что они двигаются одновременно. Gripper_motor.run_angle (200, 720)
Ожидание завершения двух параллельных действий
из pybricks.pupdevices import Motor из порта импорта pybricks.parameters из pybricks.tools импорт ждать # Инициализировать двигатели на портах A и B. track_motor = Двигатель (Порт.A) Gripper_motor = Двигатель (Порт.