
21.Определение вектора, противоположного вектора, длины вектора, нулевого и единичного векторов, коллинеарных. Равных и компланарных векторов.
Вектор – направленный отрезок, то есть отрезок, имеющий длину и направление.
Вектор, противоположный вектору , называется .
Длиной или модулем вектора называется длина отрезка и обозначается .
Вектор, длина которого равна нуля, называется нулевым вектором и обозначается . Нулевой вектор не имеет направления.
Вектор, длина которого равна единице, называется единичным и обозначается . Единичный вектор, направление которого совпадает с направлением вектора , называется орта вектора и обозначается .
Векторы называются коллинеарными, если они лежат на одной прямой или на параллельных прямых. Обозначаются . Коллинеарные векторы могут быть направлены одинаково (сонаправлены) и обозначаются и противоположно направлены — .
2
вектора называются равными, если они
одинаково направлены и имеют одинаковые
длины.
Векторы называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях.
22.Линейные операции над векторами.
1. Сумма векторов – это вектор, который можно найти по правилу треугольника или правилу параллелограмма. 3 вектора, не принадлежащие одной плоскости, можно найти по правилу параллелепипеда.
2. Разностью векторов и называют вектор , равный , такой, что вектор .
3. Произведением вектора на число α называется вектор имеющий длину , направление которого совпадает с направлением вектора , если , и противоположно ему, если .
Из определения произведения векторов следует, что
1. если и , то и коллинеарные, и наоборот, если векторы и – коллинеарные ( ), при некотором α верно равенство .
2. Если , то это означает, что каждый вектор равен произведению его модуля на орт.
Свойства линейных операций над векторами:
1. a+b=b+a
a+b=b+a
2. a+(b+c)=(a+b)+с
3. α(a+b)=αa+αb
4. (α+β)a=αa+βa
5. (αβ)a=α(βa)
6. a+0=a
7. Для любого вектора a существует противоположный ему вектор, такой, что –a, то есть a+(-a)=0.
8. 0a=0
9. 1a=a
23.Формула разложения вектора по ортам координатных осей. Координаты вектора. Выражение линейных операций над векторами в координатах.
Проекцией вектора на ось называется положительное число, если вектор и ось одинаково направлены, и отрицательное число, если вектор и ось противоположно направлены.
– ось абсцисс, – ось ординат, – ось аппликат; — называются осями координат, взаимно перпендикулярны.
— Формула разложения вектора по ортам координатных осей.
Числа
x,
y,
z
называются координатами
,
то есть координаты вектора есть проекции
на соответствующие координатные оси.
Если вектор имеет начало в начале
координат, то его координатами называют
числа, являющиеся координатами его
конца. На основании теоремы о длине
диагонали прямоугольного параллелепипеда
можно записать, что модуль вектора
равен сумме квадратов его проекций на
оси.
На основании теоремы о длине
диагонали прямоугольного параллелепипеда
можно записать, что модуль вектора
равен сумме квадратов его проекций на
оси.
– длина вектора.
Выражение линейных операций над векторами в координатах:
1. Суммой векторов называется вектор равный сумме соответствующих координат, складывающихся векторов.
Произведением векторов на число является произведение числа на соответствующие координаты.
Векторы называются равными, если их координаты равны.
Векторы называются коллинеарными, если их координаты пропорциональны.
Чтобы найти координаты вектора, нужно от координат его конца отнять координаты его начала.
Действия над векторами — презентация онлайн
Похожие презентации:
Элементы комбинаторики ( 9-11 классы)
Применение производной в науке и в жизни
Проект по математике «Математика вокруг нас. Узоры и орнаменты на посуде»
Знакомство детей с математическими знаками и монетами
Тренажёр по математике «Собираем урожай». Счет в пределах 10
Счет в пределах 10
Методы обработки экспериментальных данных
Лекция 6. Корреляционный и регрессионный анализ
Решение задач обязательной части ОГЭ по геометрии
Дифференциальные уравнения
Подготовка к ЕГЭ по математике. Базовый уровень Сложные задачи
1. Тема занятия: Действия над векторами
2. Понятие вектора
• Рассмотрим произвольныйотрезок. На нем можно указать
два направления.
Чтобы выбрать одно из
направлений, один конец отрезка
назовем НАЧАЛОМ, а другой –
КОНЦОМ и будем считать, что
отрезок направлен от начала к
концу.
• Определение.
Отрезок, для
которого указано,
какой из его концов
считается началом, а
какой — концом,
называется
направленным
отрезком или
вектором.
3. Понятие вектора
• На рисунках вектор изображается отрезком сострелкой
АВ
А
В
Вектор АВ, А – начало вектора, В – конец.
E
F
CD
D
L
K
C
EF
LK
4.
 Понятие вектора• Векторы часто обозначают и одной строчной латинской
Понятие вектора• Векторы часто обозначают и одной строчной латинскойбуквой со стрелкой над ней:
b
c
a
• Любая точка плоскости также является вектором, который
называется НУЛЕВЫМ. Начало нулевого вектора совпадает с
его концом:
М
ММ = 0.
5. Понятие вектора
• Длиной или модулем ненулевого вектора АВназывается длина отрезка АВ:
АВ = а = АВ = 5
с
В
a
с = 17
А
• Длина нулевого вектора считается равной нулю:
ММ = 0.
М
6. Коллинеарные векторы
а• Ненулевые векторы
называются
c
коллинеарными,
если они лежат либо на
одной прямой, либо на
параллельных прямых.
Коллинеарные векторы
могут быть
сонаправленными или
противоположно
направленными.
Нулевой вектор
считается коллинеарным
любому вектору.
b
m
d
s
n
L
7. Равенство векторов
а• Определение.
Векторы
называются
равными, если
они сонаправлены
и их длины равны.

а = b , если
1) а b
2) а = b
c
b
d
m
f
n
s
8. Откладывание вектора от данной точки
• Если точка А – начало вектора а , то говорят,что вектор а отложен от точки А.
А
а
• Утверждение: От любой точки М можно
отложить вектор, равный данному вектору а,
и притом только один.
М
а
Равные векторы, отложенные от разных точек, часто
обозначают одной и той же буквой
9. Сумма двух векторов
Правило треугольникаПусть а и b – два вектора. Отметим произвольную
точку А и отложим от этой точки АВ = а, затем от
точки В отложим вектор ВС = b.
АС = а + b
b
B
a
a
A
b
C
10. Сложение векторов
аДано :
а , b векторы
Найти :
c a b
b
O
c a b
Правило треугольника
11. Законы сложения векторов
1) а+b=b+a (переместительный закон)Правило параллелограмма
Пусть а и b – два вектора. Отметим
произвольную точку А и отложим от этой точки
АВ = а, затем вектор АD = b.
 На этих векторах
На этих векторахпостроим параллелограмм АВСD.
АС = АВ + BС = а+b
a
D
C
АС = АD + DС = b+a
b
a
2) (а+b)+c=a+(b+c)
(сочетательный закон)
b
A
b
a
B
12. Сложение векторов
аДано :
а , b векторы
Найти :
c a b
b
O
c a b
Правило параллелограмма
13. Сумма нескольких векторов
Правило многоугольникаs=a+b+c+d+e+f
m
d
c
n
r
b
e
a
f
s
k
O
p
k+n+m+r+p=0
14. Противоположные векторы
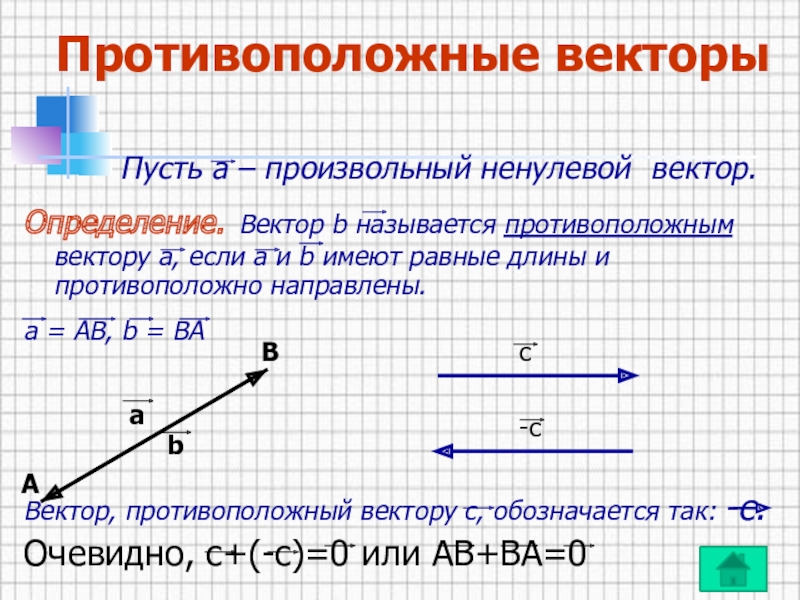
Пусть а – произвольный ненулевой вектор.Определение. Вектор b называется противоположным
вектору а, если а и b имеют равные длины и
противоположно направлены.
a = АВ, b = BA
a
b
B
c
-c
А
Вектор, противоположный вектору c, обозначается так: -c.
Очевидно, с+(-с)=0 или АВ+ВА=0
15. Вычитание векторов
Определение. Разностью двух векторов а и bназывается такой вектор, сумма которого с вектором b
равна вектору а.

Теорема. Для любых векторов а и b справедливо
равенство а — b = а + (-b).
Задача. Даны векторы а и b. Построить вектор а – b.
b
а
-b
-b
а
a-b
16. Вычитание векторов
аДано :
а , b векторы
Найти :
c a b
b
O
c a b
17. Умножение вектора на число
Определение. Произведением ненулевоговектора а на число k называется такой вектор b, длина
которого равна вектору k а , причем векторы а и b
сонаправлены при k≥0 и
противоположно направлены при k<0.
а
-2a
3а
Произведением нулевого вектора на любое число считается
нулевой вектор.
Для любого числа k и любого вектора а векторы а и
ka коллинеарны.
18. Законы умножения вектора на число
Для любых чисел k, n и любых векторов а, bсправедливы равенства:
1)
2)
3)
(kn) а = k (na) (сочетательный закон)
(k+n) а = kа + na (первый распределительный закон)
K ( а+ b ) = kа + kb (второй распределительный закон)
Свойства действий над векторами позволяют в выражениях,
содержащих суммы, разности векторов и произведения векторов
на числа, выполнять преобразования по тем же правилам, что и в
числовых выражениях.
 Например,
Например,p = 2( a – b) + ( c + a ) – 3( b – c + a ) =
= 2a – 2b + c + a – 3b + 3c – 3a = — 5b + 4c
19. Задания для закрепления
Решить № 401, 402, 40320. Спасибо за занятие
Хорошего Вам дня!!!!!English Русский Правила
Вектор — Математическая энциклопедия
геометрический
Направленный отрезок прямой в евклидовом пространстве, один конец которого (точка $A$)
называется началом координат, а другая (точка $B$)
называется концом вектора. Такой вектор можно обозначить $ \mathbf a $,
$ \overline{а}\; $,
$\vec{a}$,
или $ \overline{ {AB }}\; $.
Вектор, начало и конец которого совпадают, называется нулевым вектором и обычно обозначается $\mathbf 0 $.
Вектор характеризуется своим модулем (или длиной), который равен длине отрезка $AB$
и обозначается $ | \mathbf а | $,
и по его направлению: от $A$
до $В$.
Вектор $ \overline{BA}\; $
называется вектором, противоположным $ \overline{AB}\; $.
Вектор с длиной, равной единице, называется единичным вектором.
Помимо свободных векторов, т.е. векторов, начало которых нематериально, в механике и физике часто рассматривают векторы, характеризуемые своей длиной, направлением и местом своего начала (точки приложения). Класс равных векторов, лежащих на одной прямой, называется скользящим вектором. Также рассматриваются связанные векторы, которые называются равными, если они имеют не только равные модули и одинаковые направления, но и общую точку приложения. Векторное исчисление, которое представляет собой изучение операций, выполняемых над векторами, основано на свободных векторах, поскольку два заданных свободных вектора эквивалентны заданному скользящему вектору или заданному связанному вектору.
Понятие вектора возникло как математическая абстракция объектов, которые характеризуются величиной и направлением, такими как смещение, скорость и напряженность магнитного или электрического поля.
Комментарии
Геометрический вектор, как определено выше, исходит из таких понятий, как сила в механике, величина, которая имеет величину, направление и точку приложения. Математическая установка — это установка аффинного пространства, которое является векторным пространством «с точностью до места его начала» или, точнее, просто транзитивным групповым действием $ \phi $
(лежащей в основе аддитивной группы) векторного пространства $ L $
на множестве $A$.
Простая транзитивность определяет отображение $ \theta : A \times A \rightarrow L $
характеризуется $\phi(\theta(x,y),x)=y$.
Написание $ \vec{xy} $
для $\тета(x,y)$,
$ \vec{ху} $
— свободный вектор, определяемый связанным вектором или геометрическим вектором, $ ( x, y) $
или $ ( x, \vec{xy} ) $(
которая имеет точку приложения $ x $
а направление и величина задаются $ \vec{xy} $).
Для трех точек $ x, y , z \in A $
есть $ \vec{xy} + \vec{yz} + \vec{zx} = 0 $
в $L$,
которое называется отношением Шаля (ср.
Закон смещения в механике гласит, что сила, действующая на твердое тело, может быть перемещена вдоль линии ее действия в любую новую точку приложения. Таким образом, сила, действующая на твердое тело, является вектором скольжения.
Ссылки
| [a1] | М. Бергер, «Геометрия», I , Springer (1987), стр. Глава. 2 |
| [a2] | Х. Циглер, «Механика», I , Addison-Wesley (1965) |
Как процитировать эту запись:
Вектор. Математическая энциклопедия. URL: http://encyclopediaofmath.org/index.php?title=Vector&oldid=49131
Эта статья была адаптирована из оригинальной статьи А.Б. Иванова (создатель), которая появилась в Энциклопедии математики — ISBN 1402006098. См. оригинальную статью
Единичный вектор
Единичный вектор — это вектор, величина которого равна 1 единице. Единичные векторы обычно обозначаются строчной буквой с символом циркумфлекса («шляпы») выше, например: .
Единичные векторы обычно обозначаются строчной буквой с символом циркумфлекса («шляпы») выше, например: .
Единичный вектор можно масштабировать таким образом, чтобы он образовывал вектор, величина которого является некоторым скалярным числом, кратным единичному вектору. При умножении на скаляр величина единичного вектора изменяется, но его направление сохраняется, если только скаляр не является отрицательным; если скаляр отрицательный, направление нового вектора указывает на направление, противоположное единичному вектору, как показано на рисунке ниже.
| Положительный k | Отрицательный k |
Величина вектора, образованного умножением единичного вектора на скаляр k, обозначается следующим образом:
Как найти единичный вектор заданного вектора
вектор, разделить на величину (или норму) вектора. Единичный вектор для , равен
,
, где величина . Процесс нахождения единичного вектора иногда называют нормализацией вектора.
Процесс нахождения единичного вектора иногда называют нормализацией вектора.
Пример
Найдите единичный вектор для .
Сначала найдите величину v:
Тогда единичный вектор:
Чтобы подтвердить, что это единичный вектор, вычислите величину:
Стандартные единичные векторы
9 0002 Стандартные единичные векторы орты параллельны осям системы координат. В двумерной системе координат стандартные единичные векторы могут быть записаны как . Любой вектор в двумерной координатной плоскости можно представить как линейную комбинацию i и j. Например, мы можем написать так:В общем виде, если задано , то:
,
где v 1 и v 2 скаляры.
Пример
Пусть вектор v имеет хвост в точке (3, 5) и голову в точке (-2, 1). Запишите v как линейную комбинацию i и j.
Компоненты v равны
или в виде столбца
, что может быть записано как линейная комбинация i и j следующим образом:
Вектор показан на рисунке ниже:
Стоит отметить, что стандартные единичные векторы в 2D или любом другом измерении не зависят друг от друга, а это означает, что они не могут быть записаны как линейная комбинация любых других векторов в этом конкретном измерении.
В трехмерной координатной плоскости стандартные единичные векторы: и к.
Запись параллельных векторов с помощью единичных векторов
Единичные векторы можно использовать для записи параллельных векторов. Два вектора параллельны, если один из них можно представить как скалярное кратное другому. Таким образом, единичные векторы можно использовать для записи любого количества параллельных векторов.
Пример
Запишите вектор w в компонентной форме, учитывая, что он имеет величину 5 единиц и параллелен
Во-первых, найдите единичный вектор для v:
Поскольку имеет единичную длину и направлен в том же направлении, что и v, он параллелен v, поэтому мы можем записать w как скаляр, кратный такому, что . Таким образом:
Использование единичных векторов и углов направления для записи векторов
Если – вектор-столбец, – его единичный вектор, а θ – угол между осью x и , то компоненты лежат на единичной окружности, и мы можно использовать функции косинуса и синуса для определения таких компонентов, что
, так как .