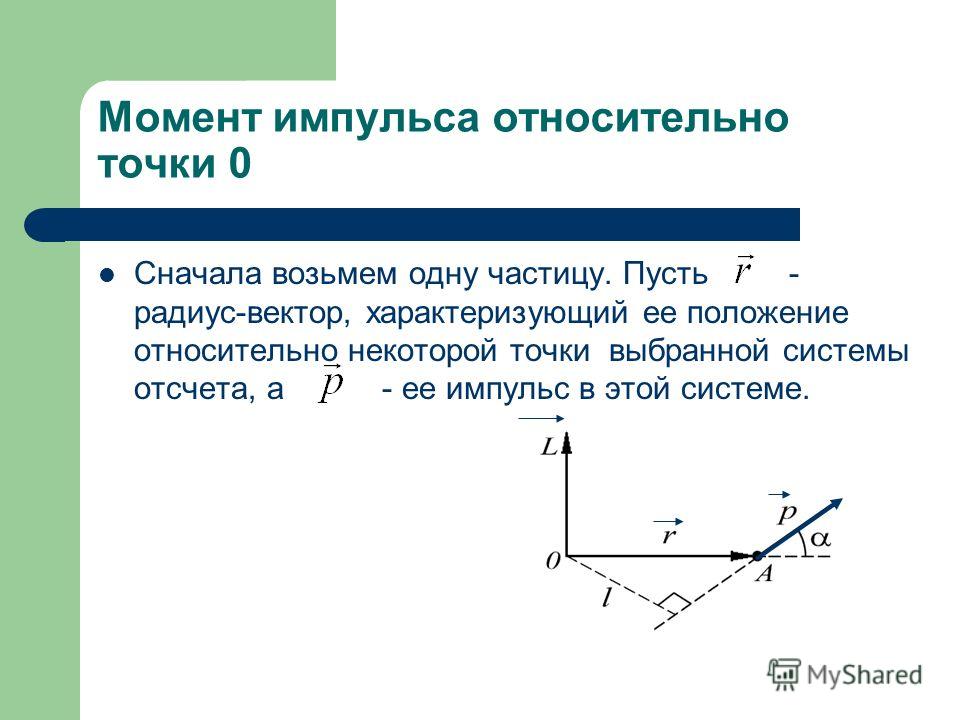
В каком случае момент силы относительно данной точки равен нулю?
В каком случае произвольная пространственная система сил приводится к динамическому винту. Как в этом случае должны быть взаимно расположены главный вектор и главный момент системы сил?
В каких случаях момент силы относительно оси равен нулю?
4. В каких случаях момент силы относительно оси равен нулю?
5. В чем состоит метод отрицательных масс и метод разбиения на части при определении координат центра тяжести.
— Виды связей и замена их реакциями.
— Главный вектор и главный момент системы сил.
— Дайте определение алгебраической величины момента силы относительно некоторого центра.
— Дайте определение алгебраического момента силы относительного некоторого центра. Поясните на рисунке как определить плечо силы и знак момента.
— Дайте
определение главного вектора и главного
момента произвольной пространственной
системы сил.
— Дайте определение главного вектора и главного момента произвольной пространственной системы сил и запишите соответствующие формулы.
— Дайте определение динамического винта. Что представляет собой геометрическое место точек пространства, в которых система сил приводится к динамическому винту?
— Дайте определение центра параллельных сил и запишите формулы для определения его положения. — Дайте определение цента тяжести. Какие способы определения координат центра тяжести Вы знаете. — Докажите как система сходящихся сил приводится к равнодействующей. — Дайте вывод формул для вычисления равнодействующей системы сходящихся сил. — Дайте обоснование векторной формулы момента силы относительно точки. — Дайте обоснование определения момента силы относительно оси.
— Докажите аналитические выражения моментов силы относительно координатных осей.
— Дайте определение
абсолютно твердого тела, материальной
точки, силы, линии действия силы, системы
сил (плоской, пространственной, сходящейся)
произвольной систем сил.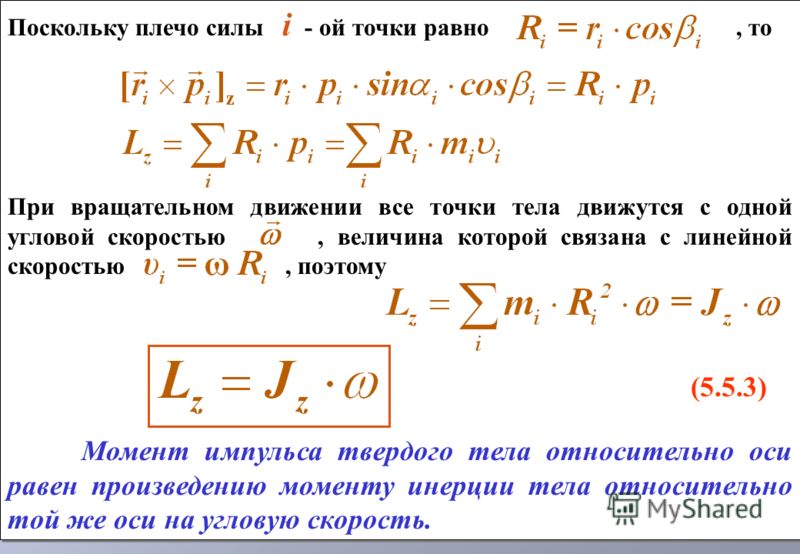
— Дайте определение момента силы относительно оси и укажите способы его нахождения.
— Дайте определение момента силы относительно оси и укажите способы его нахождения. В каких случаях момент силы относительно оси равен нулю?
— Дайте определение пары сил.
— Дайте определение силы трения скольжения.
— Дайте определение центра тяжести. Какие способы определения координат центра тяжести Вы знаете.
— Дайте определение центра параллельных сил.
— Дайте определения момента пары сил. Как направлен вектор-момент пары.
— Дайте определения равнодействующей и уравновешивающей произвольной системы сил.
— Дайте определение системы сходящихся сил. Как найти равнодействующую системы сходящихся сил графическим методом? — Дайте определение системы сходящихся сил. Как определить равнодействующую системы сходящихся сил аналитически?
— Дайте
определение центра параллельных сил и
докажите формулы для определения его
радиус-вектора и координат.
— Дайте
вывод формул для аналитического
определения главного вектора и главного
момента произвольной пространственной
системы сил.
—
Докажите
как изменяется главный момент при
изменении центра приведения.
—
Дайте
определение первого инварианта
произвольной пространственной системы
сил и докажите что является вторым
инвариантом, как его аналитически
вычислить и каков его геометрический
смысл?
—
Доказать
общий случай приведения произвольной
пространственной системы сил к
динамическому винту.
—
Доказать
частные случаи приведения произвольной
пространственной системы сил к
равнодействующей и к паре.
—
Докажите,
как определяются координаты центра
тяжести однородных тел (объёма, площади,
линии).
—
Докажите
как определяются координаты центра
тяжести однородных тел простейшей формы
(треугольника, дуги окружности).
—
Докажите
как определяются координаты центра
тяжести однородных тел простейшей формы
(дуги окружности, сектора).
—
Дать определение момента силы относительно
центра.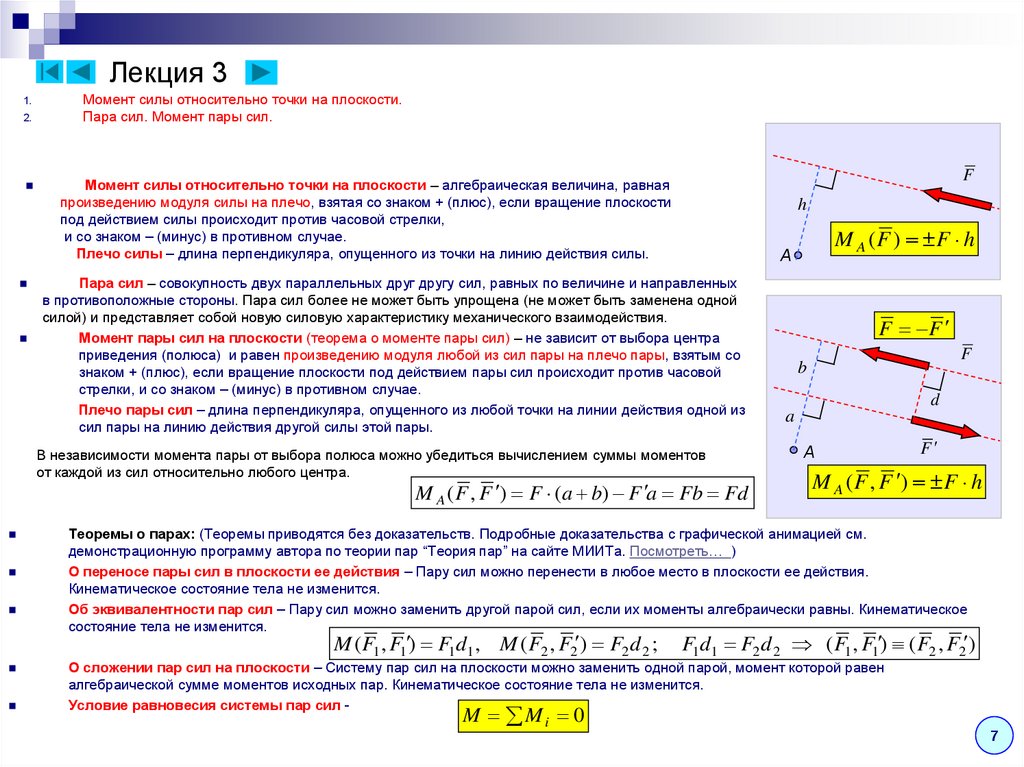
— Дать определения главного вектора и главного момента системы сил.
— Доказать теорему о параллельном переносе силы (Лемма 1).
— Доказать теорему о приведении системы сил к двум силам.
— Доказать теорему о сложении пар, расположенных в пересекающихся плоскостях (Лемма 2).
— Доказать теорему о трёх силах.
— Доказать теорему об эквивалентности систем сил.
— Если система сил приводится к равнодействующей, в каких точках пространства это имеет место? — Запишите векторное выражение момента силы относительно некоторого центра.
— Запишите и сформулируйте условия равновесия системы сходящихся сил в векторной форме, а также в проекциях на оси декартовой системы координат.
— Изложить анализ возможных случаев приведения системы сил к простейшему виду.
— Изложить аналитический способ построения динамы.
— Изложить аналитический способ построения равнодействующей. Получить уравнение линии действия равнодействующей.
— Изложить геометрический
способ построения динамы.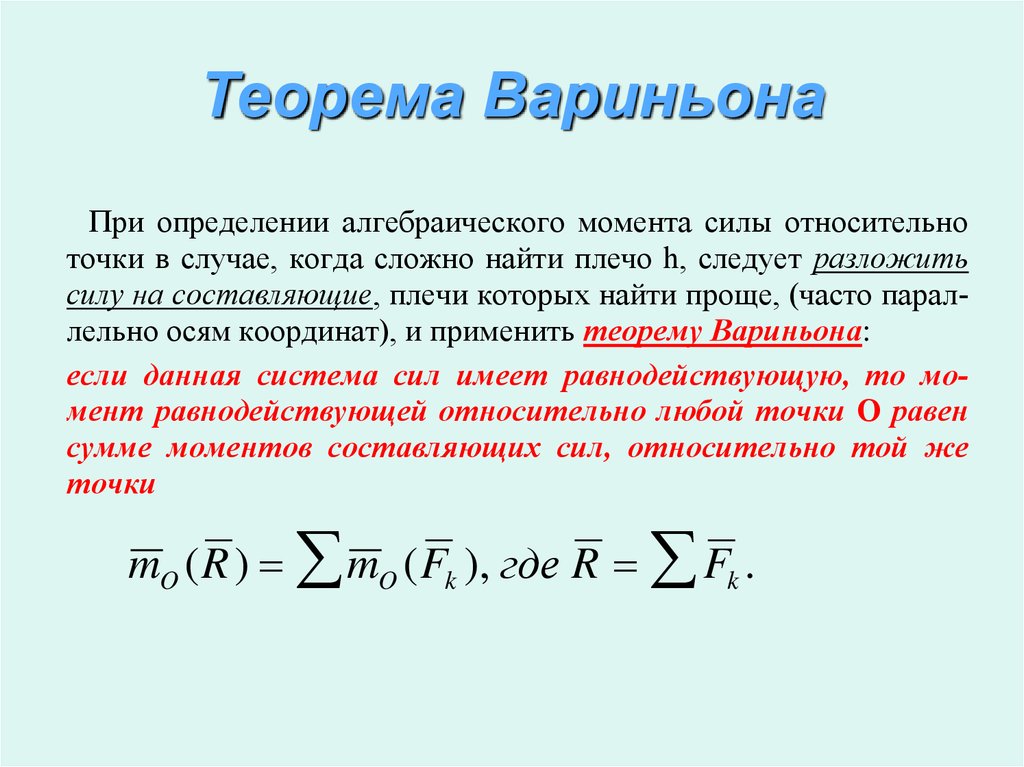
— Изложить геометрический способ построения равнодействующей.
— Изложить основные упрощающие предположения, принимаемые при расчёте ферм.
— Изложить содержание законов Амонтона-Кулона о трении.
— Изложить содержание метода вырезания узлов при расчёте фермы. Привести пример.
— Изложить содержание метода Пуансо о приведении системы сил к одному центру.
— Изложить содержание метода сквозных сечений при расчёте фермы. Привести пример.
— Изменяется ли момент силы относительно данной точки при переносе силы вдоль линии ее действия?
— Как должны быть взаимно расположены главный вектор и главный момент системы сил для того, чтобы она приводилась к динамическому винту?
— Как должны быть взаимно расположены главный вектор и главный момент системы сил для того, чтобы она приводилась к равнодействующей?
— Как изменяется главный момент системы сил при изменении центра приведения?
— Как определить равнодействующую системы сходящихся сил?
— Как
определить модуль и направление главного
вектора и главного момента.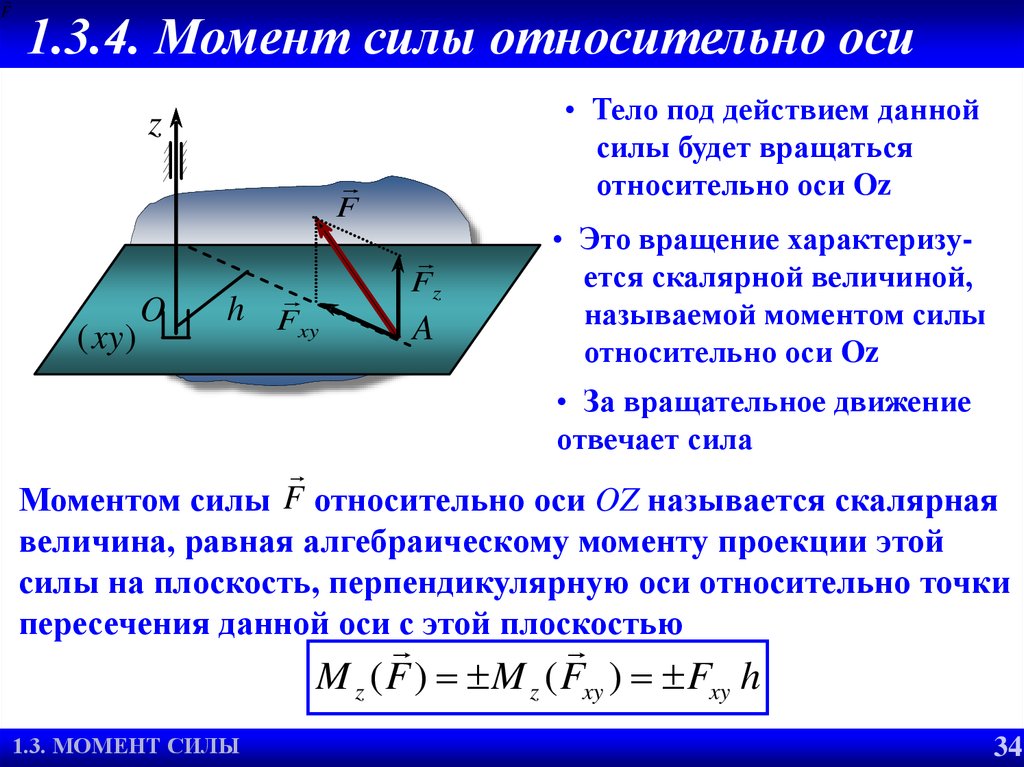 Напишите
их соответствующие аналитические
выражения.
—
Какая
система сил называется сходящейся?
Напишите
их соответствующие аналитические
выражения.
—
Какая
система сил называется сходящейся?
— Какая система сил называется парой сил, чему равен момент пары сил?
— Какая совокупность сил называется динамическим винтом.
— Какие статические инварианты Вам известны?
— Каков геометрический смысл второго инварианта.
— Какова размерность коэффициента трения качения.
— Какова связь между моментом силы относительно оси и моментом силы относительно любой точки, лежащей на этой оси.
— Какова связь между моментом силы относительно оси и моментом силы относительно любой точки, лежащей на этой оси. Поясните эту связь на рисунке.
— Каковы условия приведения пространственной силы к паре?
— Каковы условия и уравнения равновесия системы сходящихся и произвольной систем сил, расположенных в пространстве и в плоскости?
— Какие
статические инварианты Вам известны?
Запишите соответствующие формулы.
—
Каков
геометрический смысл второго инварианта.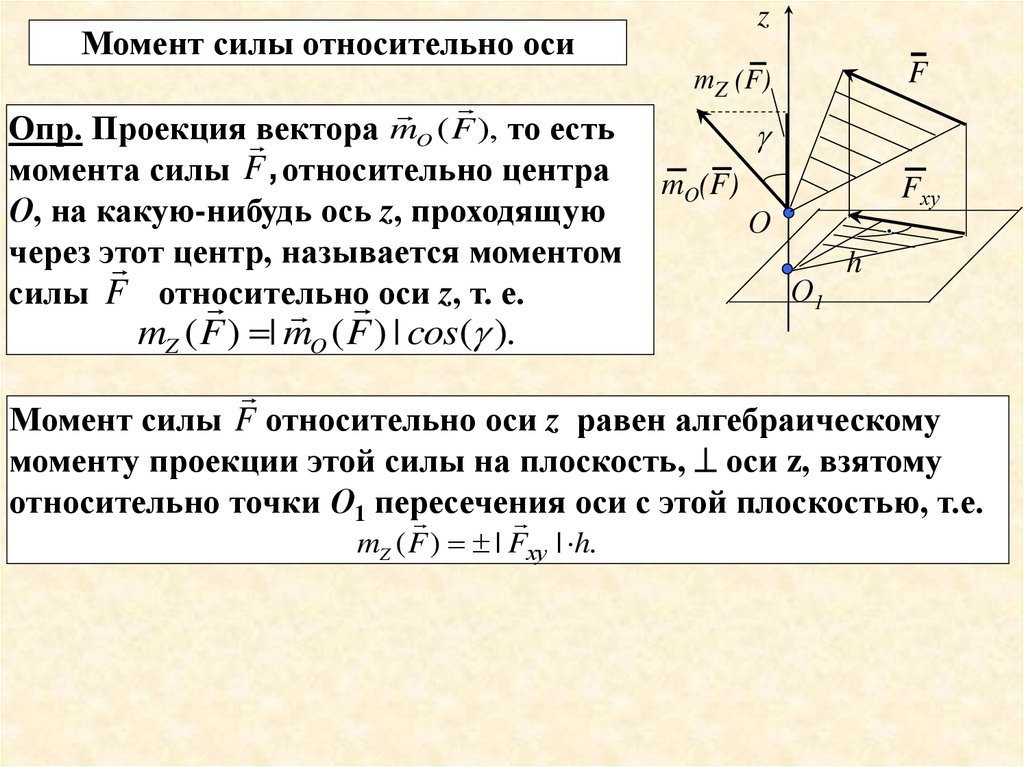 Что такое минимальный момент и чему он
равен?
—
Как
зависит главный момент системы сил от
выбора центра приведения? Запишите
соответствующую формулу и её формулировку.
— Каковы
условия приведения пространственной
системы сил к равнодействующей?
—
Лемма о трех силах. Теорема о приведении
произвольной системы сил с помощью
элементарных операций к двум силам.
Что такое минимальный момент и чему он
равен?
—
Как
зависит главный момент системы сил от
выбора центра приведения? Запишите
соответствующую формулу и её формулировку.
— Каковы
условия приведения пространственной
системы сил к равнодействующей?
—
Лемма о трех силах. Теорема о приведении
произвольной системы сил с помощью
элементарных операций к двум силам.
— Методы определения центра тяжести твердого тела.
— Момент силы относительно оси.
— Момент силы относительно точки, проекции вектора момента на координатные оси.
— Напишите аналитические выражения для главного вектора и главного момента.
— Напишите и сформулируйте три формы условий равновесия произвольной плоской системы сил.
— Напишите и сформулируйте условия равновесия произвольной пространственной системы сил в векторной и аналитической формах.
— Напишите и сформулируйте условия равновесия пространственной системы параллельных сил.
— Напишите
и сформулируйте векторные и аналитические
условия равновесия произвольной
пространственной системы сил.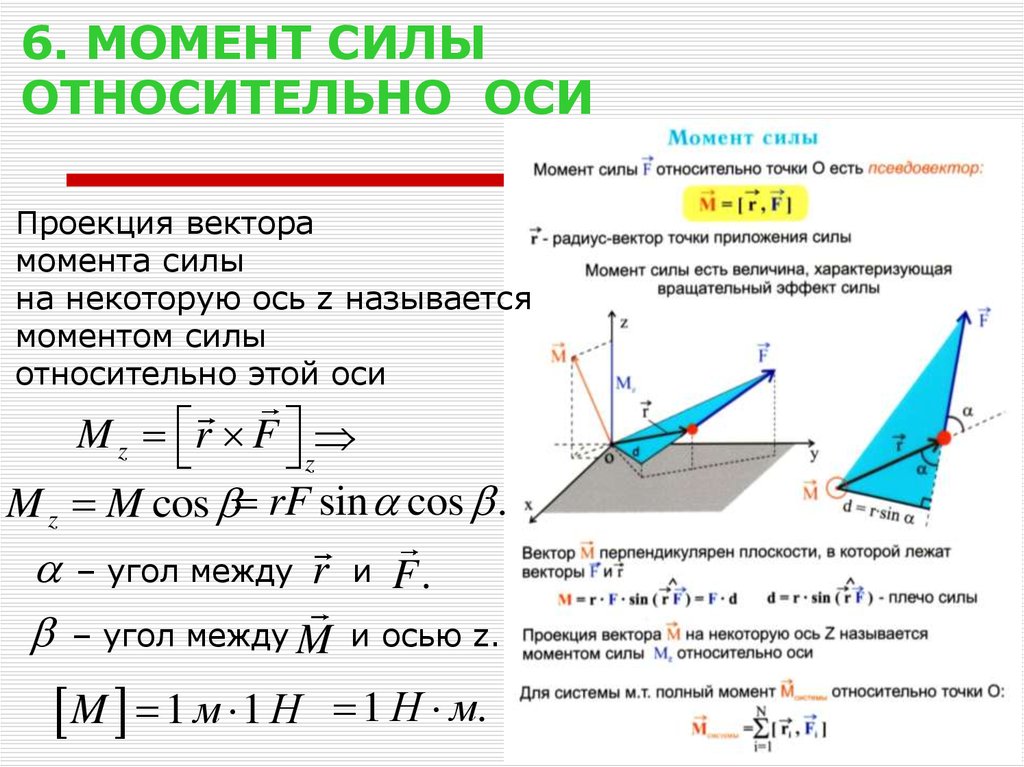
— Основная теорема статики о приведении произвольной системы сил к силе и к паре сил.
— Основная теорема статики о равновесии твердого тела под действием произвольной системы сил.
— Пара сил и её момент.
— Пара сил. Основное свойство пары сил.
— Показать, что в пределах абсолютно твёрдого тела силу можно переносить вдоль её линии действия в любую точку.
— Почему для плоской системы сил нет необходимости придавать векторный смысл моменту силы? — Получить координаты центра параллельных сил.
— Получить уравнение центральной винтовой оси.
— Получить формулы
для вычисления координат центра тяжести
однородного тела (пластины, стержня).
— Почему для плоской системы сил нет необходимости придавать векторный смысл моменту силы?
— Поясните на рисунке взаимное расположение главного вектора и главного момента произвольной плоской системы сил. — Равновесие твердого тела с учетом сил сухого трения. Конус трения.
— Различные случаи приведения систем сил.
— Рассказать о методах, применяемых при определении положения центра тяжести однородного тела (симметрия, метод разбиений, метод отрицательных масс).
— Рассказать о статических инвариантах системы сил.
— Рассказать о трении качения.
— Сформулировать основные аксиомы статики.
— Сформулируйте
аксиомы статики.
—
Сформулируйте
теорему о трех уравновешенных силах.
—
Сформулируйте
и запишите векторное выражение момента
силы относительно некоторого центра.
—
Сформулируйте
и запишите соответствующие формулы для
определения равнодействующей двух
параллельных и антипараллельных сил и
точки её приложения.
—
Сформулируйте
теоремы об эквивалентности и сложении
пар, иллюстрируя эти теоремы соответствующими
рисунками. —
Сформулируйте
лемму о параллельном переносе силы. Что
такое присоединенная пара, чему равен
её момент?
—
Сформулируйте
основную теорему статики о приведении
произвольной системы сил к простейшему
виду.
—
Сформулируйте
и докажите теорему о зависимости между
моментом силы относительно оси и моментом
силы относительно любой точки, лежащей
на этой оси.
—
Сформулируйте
и докажите условия равновесия системы
сходящихся сил.
—
Сформулируйте
определение момента трения качения.
Поясните на рисунке, что представляет
собой коэффициента трения качения и
какова его размерность?
—
Сформулируйте
лемму о параллельном переносе силы. Что
такое присоединенная пара, чему равен
её момент?
—
Сформулируйте
основную теорему статики о приведении
произвольной системы сил к простейшему
виду.
—
Сформулируйте
и докажите теорему о зависимости между
моментом силы относительно оси и моментом
силы относительно любой точки, лежащей
на этой оси.
—
Сформулируйте
и докажите условия равновесия системы
сходящихся сил.
—
Сформулируйте
определение момента трения качения.
Поясните на рисунке, что представляет
собой коэффициента трения качения и
какова его размерность?
— Сформулируйте
и докажите теорему о трех уравновешенных
силах.
—
Сформулируйте
и докажите правило сложения двух
параллельных сил.
—
Сформулируйте
и докажите правило сложения двух
антипараллельных сил.
—
Дайте
определение пары сил и обоснование
определения момента пары. Вектор-момент
пары и его направление.
—
Сформулируйте
и докажите теорему о перемещении пары
сил в плоскости её действия.
—
Сформулируйте
и докажите теорему о перемещении пары
сил в плоскость параллельную плоскости
её действия.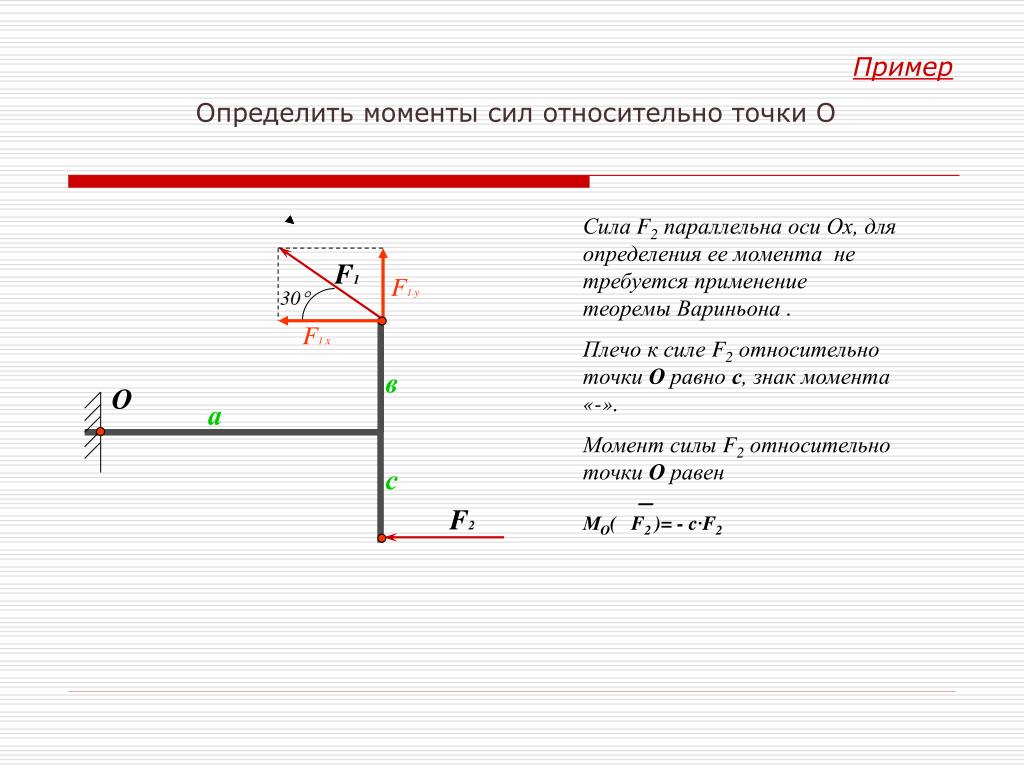 —
Сформулируйте
и докажите теорему об изменении плеча
и сил пары.
—
Сформулируйте
и докажите теорему о сложении пар как
угодно расположенных в пространстве.
—
Сформулируйте
и докажите теорему о параллельном
переносе силы.
—
Сформулируйте
и докажите теорему о приведении
произвольной пространственной системы
сил к главному вектору и главному
моменту.
—
Сформулируйте
и докажите теорему Вариньона для
произвольной пространственной системы
сил.
—
Сформулируйте
и докажите условия равновесия произвольной
пространственной системы сил.
—
Сформулируйте
и докажите условия равновесия произвольной
плоской системы сил.
—
Сформулируйте
и докажите условия равновесия системы
параллельных сил в пространстве.
—
Сформулируйте
и докажите вторую форму условий равновесия
произвольной плоской системы сил
(теорема о трех моментах).
—
Сформулируйте
и докажите третью форму условий равновесия
произвольной плоской системы сил.
—
Сформулируйте
лемму о параллельном переносе силы.
—
Сформулируйте
и докажите теорему об изменении плеча
и сил пары.
—
Сформулируйте
и докажите теорему о сложении пар как
угодно расположенных в пространстве.
—
Сформулируйте
и докажите теорему о параллельном
переносе силы.
—
Сформулируйте
и докажите теорему о приведении
произвольной пространственной системы
сил к главному вектору и главному
моменту.
—
Сформулируйте
и докажите теорему Вариньона для
произвольной пространственной системы
сил.
—
Сформулируйте
и докажите условия равновесия произвольной
пространственной системы сил.
—
Сформулируйте
и докажите условия равновесия произвольной
плоской системы сил.
—
Сформулируйте
и докажите условия равновесия системы
параллельных сил в пространстве.
—
Сформулируйте
и докажите вторую форму условий равновесия
произвольной плоской системы сил
(теорема о трех моментах).
—
Сформулируйте
и докажите третью форму условий равновесия
произвольной плоской системы сил.
—
Сформулируйте
лемму о параллельном переносе силы.
— Сформулируйте необходимые и достаточные условия равновесия произвольной плоской системы сил?
— Сформулируйте
определение момента трения качения.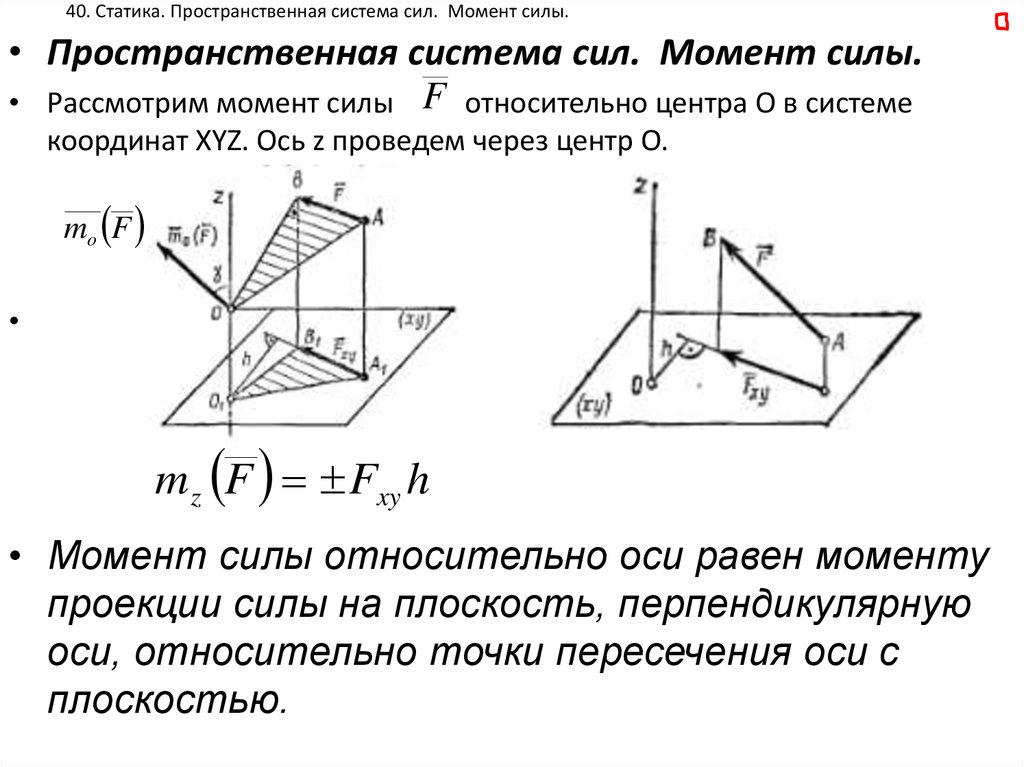
— Сформулируйте основную теорему статики (о приведении произвольной пространственной системы сил к заданному центру).
— Сформулируйте порядок решения задач статики.
— Сформулируйте теорему о трех уравновешенных силах.
— Сформулируйте теоремы об эквивалентности и сложении пар.
— Трение скольжения. Статический и динамический коэффициенты трения скольжения. Угол трения. — Трение качения. Момент трения качения. Коэффициент трения качения и его размерность.
— Теорема о связи между главными моментами относительно разных точек.
— Теорема о связи между моментами силы относительно точки и оси.
— Теорема об эквивалентных системах сил.
— Теорема Пуансо о приведении произвольной системы сил с помощью элементарных операций к силе и к паре сил.
— Уравнения равновесия твердого тела под действием плоской системы сил.
— Уравнения равновесия твердого тела под действием произвольной системы сил.
— Уравнения равновесия
твердого тела под действием системы
параллельных сил.
— Установить условия жёсткости и статической определимости фермы.
— Установить необходимые и достаточные условия равновесия системы сил.
— Установить основные свойства пары сил.
— Установить связь между главными моментами системы сил, вычисленными относительно двух центров.
— Центр системы параллельных сил.
— Центр тяжести твердого тела и вывод формул для его определения.
— Чем отличается главный вектор от равнодействующей произвольной системы сил.
— Чему равна и как направлена сила трения скольжения. Какова размерность коэффициента трения скольжения.
— Что называется моментом силы, как определяется момент силы относительно точки?
— Что называется проекцией силы на ось, на плоскость?
— Что называют связью? В чем заключается принцип освобождения от связей? Перечислите основные типы связей, покажите их реакции.
— Что представляет собой геометрическое место точек пространства, в которых система сил приводится к динамическому винту?
— Что
такое пара сил? Можно ли заменить пару
сил равнодействующей? Дайте определение
алгебраического и векторного момента
пары сил. —
Элементарные операции над системами
сил.
—
Элементарные операции над системами
сил.
Момент — сила — относительно данная точка
Cтраница 1
Момент силы относительно данной точки обращается в нуль в том случае, когда линия действия силы проходит через вту точку, так как в этом случае плечо силы равно нулю. [1]
Момент силы относительно данной точки не изменяется при переносе точки приложения силы по линии ее действия, так как при этом не изменяются ни модуль силы, ни ее плечо, ни направление вращения. [2]
Момент силы относительно данной точки обращается в нуль в том случае, когда линия действия силы проходит через эту точку, так как в этом случае плечо силы равно нулю. [3]
Изменяется ли момент силы относительно данной точки при переносе силы вдоль линии ее действия. [4]
Условимся изображать момент силы относительно данной точки вектором, модуль которого равен произведению силы на плечо, а направление совпадает с перпендикуляром к плоскости действия момента, причем наблюдатель, смотрящий с конца вектора-момента, должен видеть поворот плоскости действия момента совершающимся против часовой стрелки. [5]
[5]
Алгебраической величиной момента силы относительно данной точки называется произведение величины силы на длину перпендикуляра, опущенного из этой точки на линию действия силы. [6]
В каком случае момент силы относительно данной точки равен нулю. [7]
| В этом равенстве под т ( F, F и то ( F в случае. [8] |
При изучении плоской системы сил мы рассматривали момент силы относительно данной точки как алгебраическую величину, равную произведению модуля силы на ее плечо, взятому со знаком плюс или минус. Из теоремы Вариньона известно, что моменты сил, лежащих в одной плоскости, складываются алгебраически. Точно так же алгебраически складываются и моменты пар, расположенных в одной плоскости. [9]
При изучении плоской системы сил мы рассматривали момент силы относительно данной точки как алгебраическую величину, равную произведению модуля силы на ее плечо, взятому со знаком плюс или минус.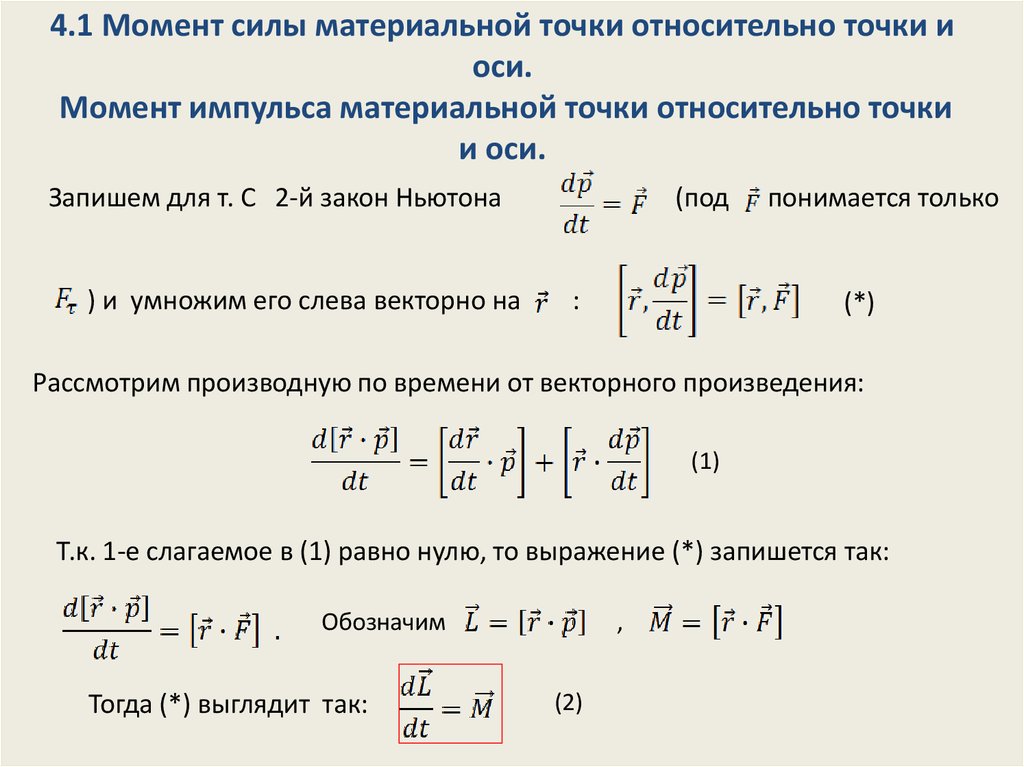 Из теоремы Вариньона известно, что моменты сил, лежащих в одной плоскости, складываются алгебраически. Точно так же алгебраически складываются и моменты пар, расположенных б одной плоскости.
[10]
Из теоремы Вариньона известно, что моменты сил, лежащих в одной плоскости, складываются алгебраически. Точно так же алгебраически складываются и моменты пар, расположенных б одной плоскости.
[10]
| В этом равенстве под т ( F, F и MO ( F в случае. [11] |
При изучении плоской системы сил мы рассматривали момент силы относительно данной точки как алгебраическую величину, равную произведению модуля силы на ее плечо, взятому со знаком плюс или минус. Из теоремы Вариньона известно, что моменты сил, лежащих в одной плоскости, складываются алгебраически. Точно так же алгебраически складываются и моменты пар, расположенных в одной плоскости. [12]
Одним из основных понятий механики наряду с моментом пары является понятие момента силы относительно данной точки. [13]
Точку приложения силы можно брать в любом месте на линии ее действия, причем момент силы относительно данной точки от этого не изменится, так как плечо силы остается постоянным.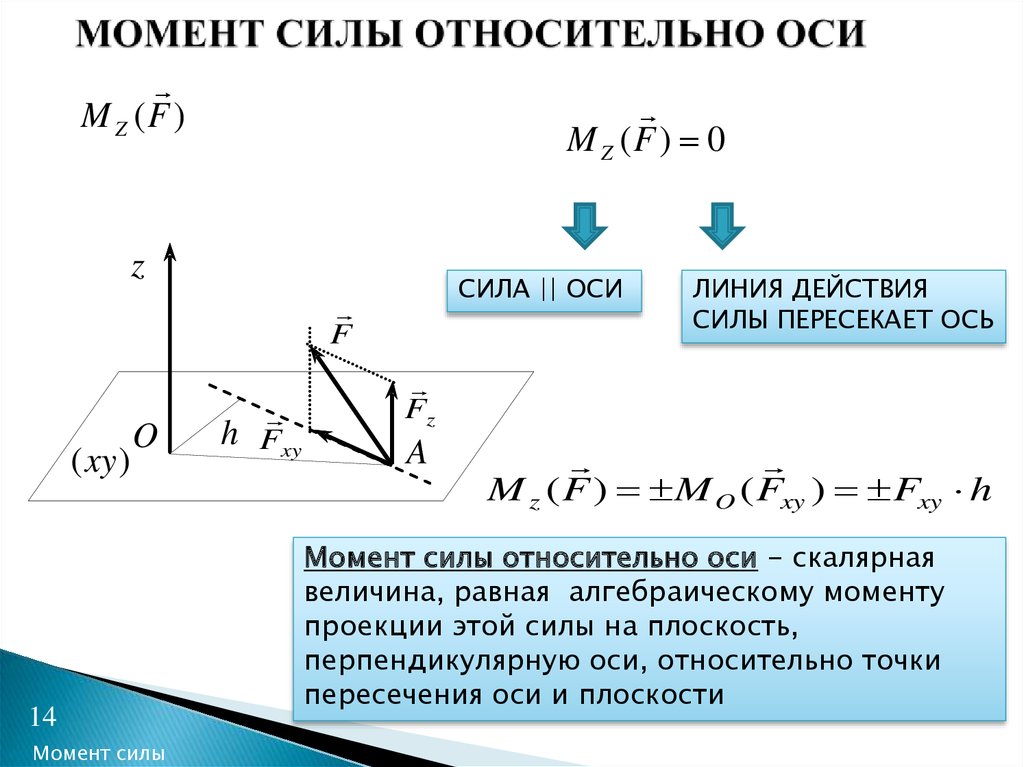 [14]
[14]
Точку приложения силы можно брать в любом месте на линии ее действия, причем момент силы относительно данной точки от этого не изменится, так как плечо силы остается тем же. [15]
Страницы: 1 2
ньютоновская механика — Если суммарный внешний момент тела относительно точки равен нулю
Момент силы $\boldsymbol{F}$, действующей через некоторую точку $\boldsymbol{r}_1$ в пространстве, равен $$\ boldsymbol{M}_0 = \boldsymbol{r}_1 \times \boldsymbol{F} \tag{1}$$
Теперь перенесите момент из начала координат 0 в точку 1 , где действует сила
$ $ \boldsymbol{M}_1 = \boldsymbol{M}_0 + (- \boldsymbol{r}_1) \times \boldsymbol{F} = \boldsymbol{r}_1 \times \boldsymbol{F} — \boldsymbol{r }_1 \times \boldsymbol{F} = \boldsymbol{0} $$
Значит, это правда, что
Момент, вызванный силой, равен нулю, если сила проходит через точку, в которой измеряется момент.
Здесь предполагается, что результирующая сила отлична от нуля $\boldsymbol{F} \neq 0$.
 Здесь предполагается, что результирующая сила отлична от нуля $\boldsymbol{F} \neq 0$.
Здесь предполагается, что результирующая сила отлична от нуля $\boldsymbol{F} \neq 0$.Теперь рассмотрим более общий случай момента $\boldsymbol{M}_0$, вызванного смещающей силой $\boldsymbol{F}$ в точке $\boldsymbol{r}_1$, точно так же, как раньше и a параллельный момент $\boldsymbol{M}_1$ около 1 . Это означает, что $\boldsymbol{M}_1$ и $\boldsymbol{F}$ действуют в одном направлении, так что $\boldsymbol{M}_1 = h \boldsymbol{F}$, где скаляр $h$ (в единицы расстояния) является «шагом». Затем момент в 9{2}}=\boldsymbol{M}_{0}\;\галочка \end{выровнено} $$
Что также делает следующее утверждение верным (даже когда результирующая сила отлична от нуля $\boldsymbol{F} \neq 0$)
К твердому телу приложена ненулевая результирующая сила $\boldsymbol{F}$ и результирующий момент $\boldsymbol{M}$, приложенный к некоторой точке пространства. Момент можно преобразовать в любую другую точку пространства, но при преобразовании по точкам определенной линии в пространстве (называемой линией действия силы) результирующий момент минимален, а составляющие параллельны линии действия.
 Положение линии определяется (3), а направление линии определяется направлением силы $\boldsymbol{F}$.
Положение линии определяется (3), а направление линии определяется направлением силы $\boldsymbol{F}$.Точнее, точка (3) является ближайшей точкой на прямой к месту суммирования моментов $\boldsymbol{M}_0$.
См. также
- Значение направления крутящего момента
- Определить точку, в которой вектор момента равен нулю на трехмерном теле
- Почему крутящий момент является векторным произведением?
ньютоновская механика — Как существует момент для группы сил, равнодействующая которой равна нулю?
спросил
Изменено 2 месяца назад
Просмотрено 628 раз
$\begingroup$
Я новичок в механике, и когда меня познакомили с моментами, была теорема, которая гласит «если множество сил, действующих на твердое тело, имеет равнодействующую, то алгебраическая сумма этих сил относительно некоторой точки равна к моменту равнодействующей относительно этой точки», так что я понял, что если равнодействующая сил равна нулю, то момент этих сил также должен быть равен нулю, применяя предыдущую теорему, а также потому, что M = rxR, поэтому, если R равно нулю, то момент тоже равен нулю, но потом я узнал пары, в парах равнодействующая равна нулю, но момент не равен нулю, как это, если M=rxR, то момент должен быть равен нулю.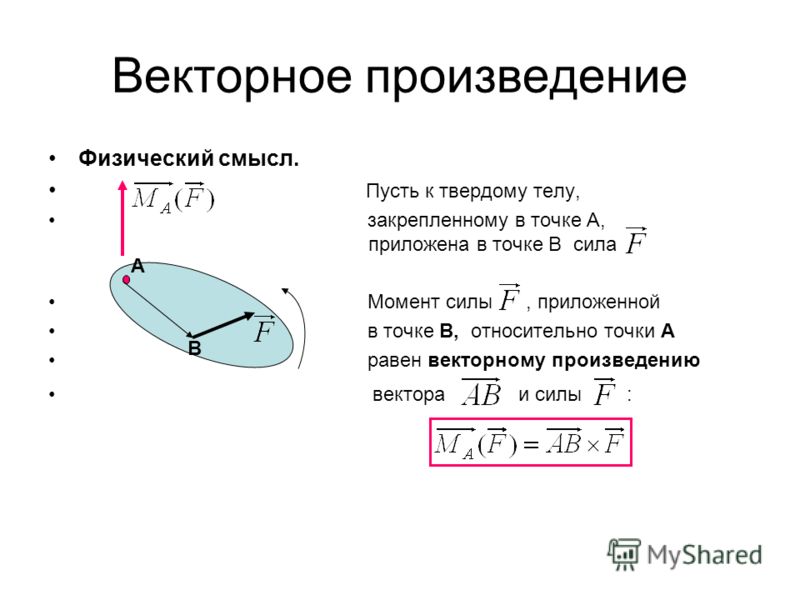 Я надеюсь, что вы понимаете мой вопрос, и я буду благодарен всем, кто ответит на него.
Я надеюсь, что вы понимаете мой вопрос, и я буду благодарен всем, кто ответит на него.
- ньютоновская механика
- силы
- крутящий момент
- равновесие
- момент
$\endgroup$
1
$\begingroup$
Чтобы доказать свое первое утверждение, когда равнодействующая отлична от нуля, вы используете тот факт, что равнодействующая сила действует вдоль единственной линии в пространстве. Фактически, на этой линии сумма моментов отдельных сил равна нулю.
Если результирующая сила равна нулю, весь расчет не имеет смысла, потому что нет «уникальной линии в пространстве», которую вы можете выбрать.
В качестве простого примера в двух измерениях предположим, что у вас есть единичная сила, действующая в направлении +X в точке (X = 0, Y = 1), и единичная сила в направлении -X в точке (X = 0, Y = -1).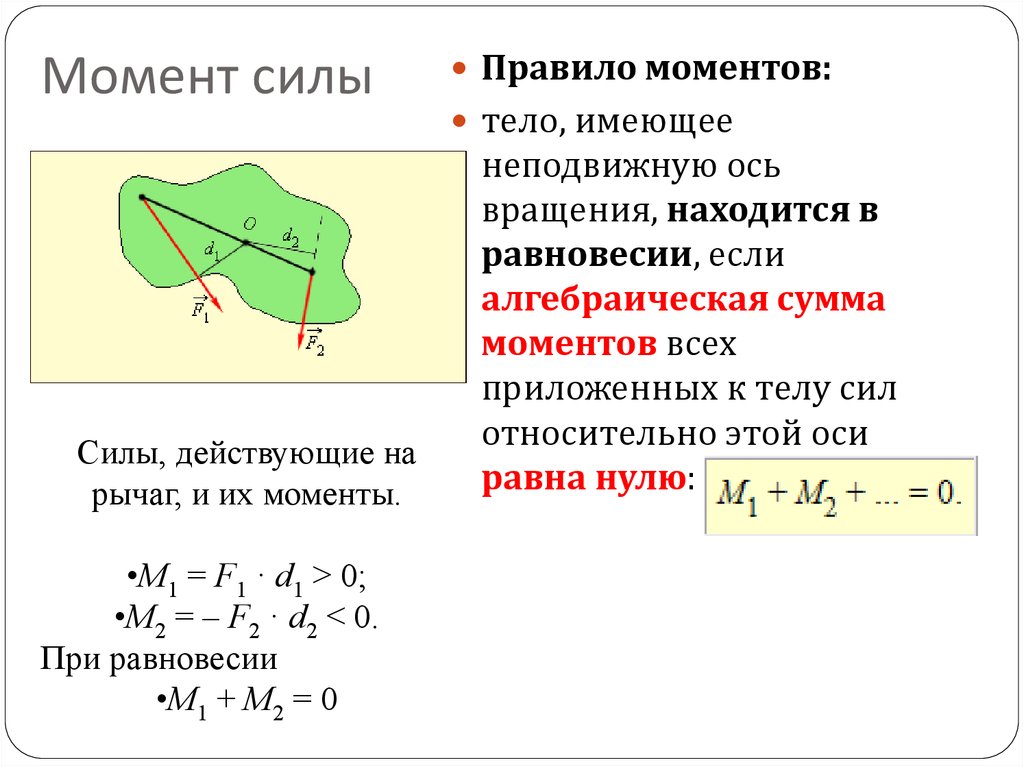 Должно быть очевидно, что суммарный момент двух сил относительно начала координат (X = 0, Y = 0) имеет величину 2, и фактически он также имеет величину 2 относительно любой другой точки плоскости.
Должно быть очевидно, что суммарный момент двух сил относительно начала координат (X = 0, Y = 0) имеет величину 2, и фактически он также имеет величину 2 относительно любой другой точки плоскости.
$\endgroup$
1
$\begingroup$
Момент равнодействующей относительно данной оси не равен сумме моментов отдельных сил. Чтобы это было правдой, плечо момента каждой из сил должно быть равно плечу момента равнодействующей (что обычно не так). Если уж на то пошло, что вообще означает плечо момента равнодействующей?
$\endgroup$
$\begingroup$
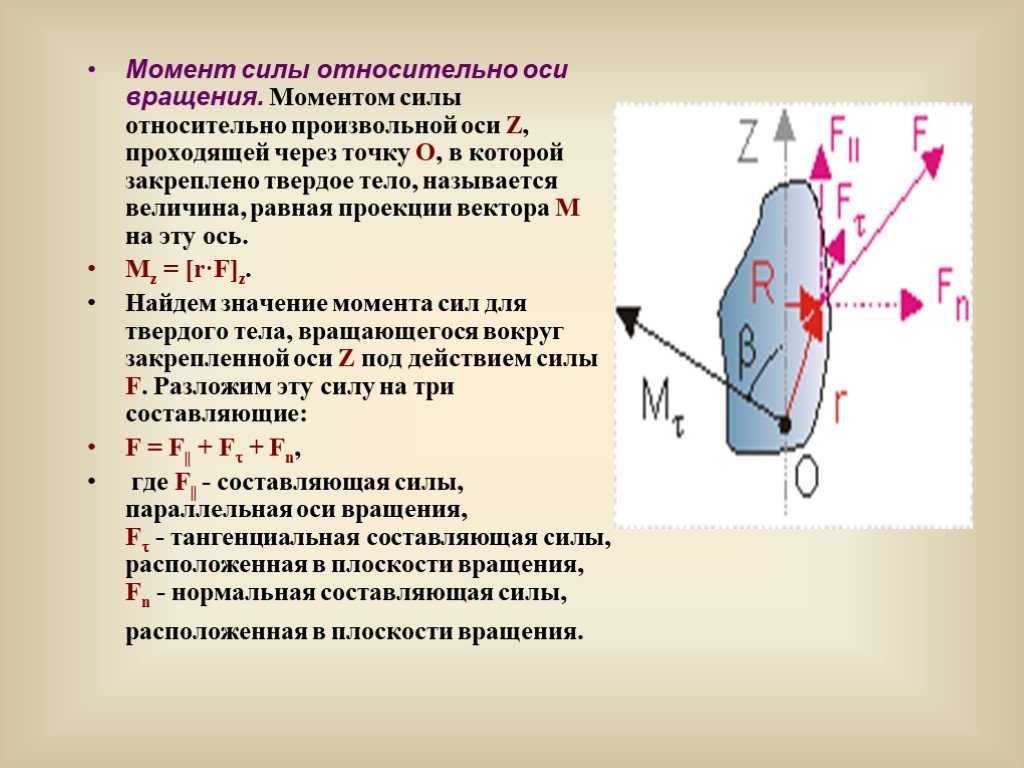
Попробуем разобраться. Векторная сумма сил, действующих на объект, определяет скорость изменения количества движения. Это изменение можно выразить как МА, где (М) — полная масса, а (А) — вектор ускорения центра масс. Точно так же векторная сумма крутящих моментов относительно точки внутри объекта определяет скорость изменения углового момента относительно этой точки. (Это становится более сложным.) Я предполагаю, что когда вы говорите о моменте, вы говорите о крутящем моменте. Крутящий момент можно лучше всего определить как работу на единицу угла поворота (в джоулях/радианах), которая может быть выполнена силой, действующей таким образом, чтобы вызвать вращение. В простейшем случае объекта, вращающегося вокруг неподвижной оси, это сводится к радиусу, измеренному (перпендикулярно) от оси до точки приложения силы, умноженному на тангенциальную составляющую силы. В этом случае сумма крутящих моментов относительно этой оси определяет угловое ускорение относительно этой оси. Каждый крутящий момент и угловое ускорение представлены векторами вдоль оси. Иногда вам может понадобиться использовать векторную сумму крутящих моментов относительно центра масс, чтобы найти угловое ускорение относительно центра масс.
Точно так же векторная сумма крутящих моментов относительно точки внутри объекта определяет скорость изменения углового момента относительно этой точки. (Это становится более сложным.) Я предполагаю, что когда вы говорите о моменте, вы говорите о крутящем моменте. Крутящий момент можно лучше всего определить как работу на единицу угла поворота (в джоулях/радианах), которая может быть выполнена силой, действующей таким образом, чтобы вызвать вращение. В простейшем случае объекта, вращающегося вокруг неподвижной оси, это сводится к радиусу, измеренному (перпендикулярно) от оси до точки приложения силы, умноженному на тангенциальную составляющую силы. В этом случае сумма крутящих моментов относительно этой оси определяет угловое ускорение относительно этой оси. Каждый крутящий момент и угловое ускорение представлены векторами вдоль оси. Иногда вам может понадобиться использовать векторную сумму крутящих моментов относительно центра масс, чтобы найти угловое ускорение относительно центра масс.