
Синхронный электродвигатель презентация, доклад
Синхронный электродвигатель
Синхронный электродвигатель – электрическая установка, действующая от сети переменного и постоянного тока. Синхронная машина улучшает коэффициент мощности. Данные моторы используются довольно часто в электрической системе, потому что они подходят для любой сети напряжения и обладают высокими экономическими данными.
Область применения
конвейеры
мощные вентиляторы
мельницы
компрессоры
станки
УСТРОЙСТВО СИНХРОННОГО ДВИГАТЕЛЯ
Конструктивная схема синхронного двигателя с неподвижным якорем
Конструктивная схема синхронного двигателя с вращающимся якорем
1………………………….………якорь
2…………………..обмотка якоря
3…………….полюсы индуктора
4………обмотка возбуждения
5…………………. кольца и щетки
кольца и щетки
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора. В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных агрегатах индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов.
ПРИНЦИП РАБОТЫ СИНХРОННОГО ДВИГАТЕЛЯ
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
Как правило, при разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели.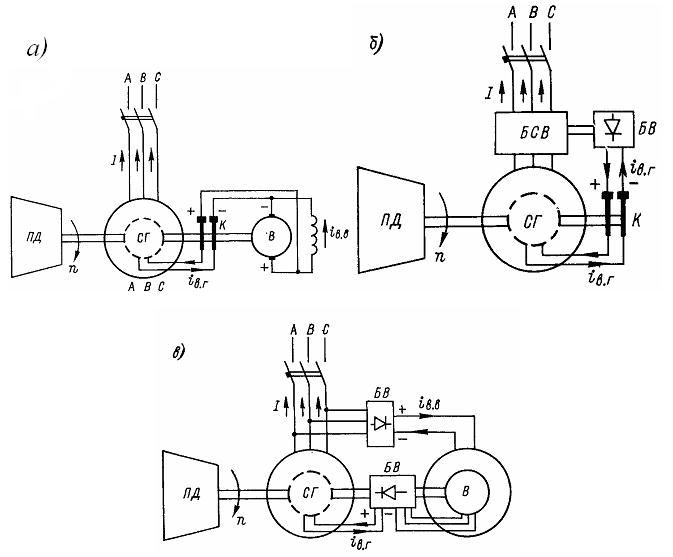
СХЕМЫ ВКЛЮЧЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ
На сегодняшний день использование синхронных двигателей получило широкое распространение в сфере производства оборудования, работающего с постоянной скоростью, которое применяется в разных сферах человеческой деятельности. В связи с этим, существует несколько способов запуска синхронных электродвигателей. Способы пуска синхронного электродвигателя достаточно сложны, в этом заключается один из основных недостатков электродвигателей данного типа. Запуск синхронных электродвигателей осуществляется либо посредством воздействия вспомогательного пускового двигателя, либо с помощью асинхронного пуска.
СХЕМЫ ВКЛЮЧЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ
Асинхронный пуск синхронного электродвигателя предполагает расположение дополнительной короткозамкнутой обмотки в полюсных наконечниках полюсов ротора. Это необходимо, чтобы обеспечить во время пуска вывод чрезмерно большой Э. Д.С., образующейся в обмотке (1), что является возможным благодаря замыканию рубильника (2) на соединение (3). Благодаря тому, что магнитное поле, возникающее в результате включения напряжения трехфазной сети в обмотке статора (4), пересекает короткозамкнутую обмотку (пусковую обмотку), находящуюся в полюсных наконечниках ротора, индуктируются токи.
Д.С., образующейся в обмотке (1), что является возможным благодаря замыканию рубильника (2) на соединение (3). Благодаря тому, что магнитное поле, возникающее в результате включения напряжения трехфазной сети в обмотке статора (4), пересекает короткозамкнутую обмотку (пусковую обмотку), находящуюся в полюсных наконечниках ротора, индуктируются токи.
Действие этих токов в сочетании с вращающимся полем статора, запускают во вращение ротор, который постепенно набирает обороты. Достигнув 95-97% количества оборотов рубильник (2) ротора переходит в состояние, которое вынуждает обмотку ротора включить сеть постоянного напряжения.
Асинхронный пуск синхронного электродвигателя не лишен недостатков, точнее сказать, недостатка, которым является большой пусковой ток, который по значению может превышать в 7 раз рабочий ток.
Столь высокое значение пускового тока является причиной падения напряжения в сети, что негативно сказывается на функционировании других потребителей энергии. Одним из наиболее распространенных вариантов решения упомянутого недостатка является использование автотрансформатора для понижения напряжения, а также использование тиристорных возбудителей для пуска синхронных электродвигателей, которые отличаются высоким К.П.Д. Именно высокое значение К.П.Д. во многом определило выбор тиристорных возбудителей в качестве комплектов большей части выпускаемых синхронных электродвигателей крупных размеров. К тому же, применение тиристорных возбудителей позволяет автоматизировать процесс подачи возбуждения синхронному двигателю. Автоматизация может быть реализована 2-мя способами: подача возбуждения синхронному двигателю в функции скорости и подача возбуждения синхронному двигателю в функции тока. При этом контроль подачи возбуждения синхронному двигателю в функции тока осуществляется с помощью реле тока.
Одним из наиболее распространенных вариантов решения упомянутого недостатка является использование автотрансформатора для понижения напряжения, а также использование тиристорных возбудителей для пуска синхронных электродвигателей, которые отличаются высоким К.П.Д. Именно высокое значение К.П.Д. во многом определило выбор тиристорных возбудителей в качестве комплектов большей части выпускаемых синхронных электродвигателей крупных размеров. К тому же, применение тиристорных возбудителей позволяет автоматизировать процесс подачи возбуждения синхронному двигателю. Автоматизация может быть реализована 2-мя способами: подача возбуждения синхронному двигателю в функции скорости и подача возбуждения синхронному двигателю в функции тока. При этом контроль подачи возбуждения синхронному двигателю в функции тока осуществляется с помощью реле тока.
СХЕМЫ ВКЛЮЧЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ
Пуск синхронного двигателя при помощи вспомогательного двигателя предполагает запуск синхронного электродвигателя благодаря работе другого двигателя, работа которого позволяет ротору синхронного двигателя развернуть полюса, осуществляя дальнейшее вращение совершенно самостоятельно. Чтобы запуск произошел, нужно создать условия, при которых количество пар полюсов асинхронного двигателя было бы меньше количества пар полюсов синхронного двигателя. Порядок запуска синхронного двигателя предполагает включение рубильника (3), пуск вспомогательного асинхронного двигателя (2), осуществляющего разворот ротора синхронного двигателя (1) до скорости, которая соответствует скорости поля статора. Далее включаются полюсы ротора после включения рубильника (4).
Чтобы запуск произошел, нужно создать условия, при которых количество пар полюсов асинхронного двигателя было бы меньше количества пар полюсов синхронного двигателя. Порядок запуска синхронного двигателя предполагает включение рубильника (3), пуск вспомогательного асинхронного двигателя (2), осуществляющего разворот ротора синхронного двигателя (1) до скорости, которая соответствует скорости поля статора. Далее включаются полюсы ротора после включения рубильника (4).
При включении синхронного двигателя в сеть трехфазного тока, требуется синхронизация, осуществляемая реостатом (5). Реостат организует возбуждение, позволяющее установить напряжение обмотки статора, определяемое вольтметром V, равное напряжению в сети, которое указывает вольтметр V1.
При разомкнутом рубильнике лампы (6), расположенные параллельно ножам рубильника (7), буду мигать. По мере того, как будет меняться скорость ращения вспомогательного асинхронного двигателя, лампы будут постепенно начинать мигать все реже, пока все они не погаснут в раз.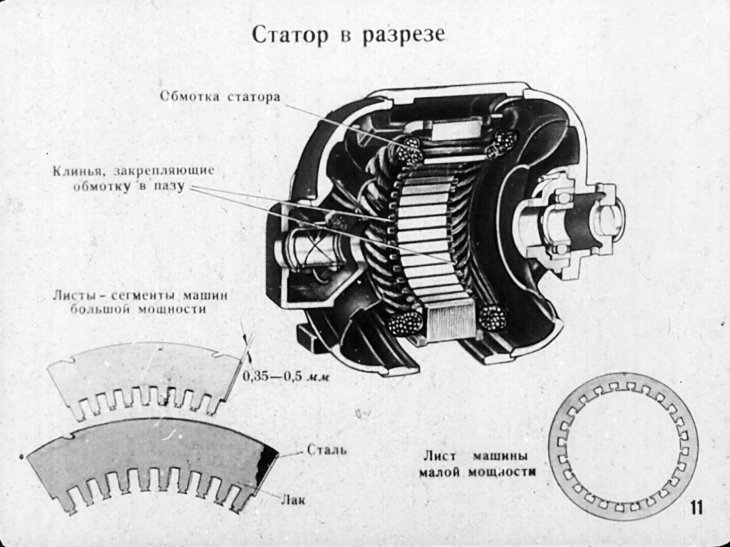 Это сигнал того, что синхронный двигатель пора включать в сеть трехфазного тока рубильником (7). Так как ротор двигателя далее может вращаться без помощи, то вспомогательный двигатель (2) пора отключать от сети посредством рубильника (3).
Это сигнал того, что синхронный двигатель пора включать в сеть трехфазного тока рубильником (7). Так как ротор двигателя далее может вращаться без помощи, то вспомогательный двигатель (2) пора отключать от сети посредством рубильника (3).
Это сложная процедура, являющаяся самым главным недостатком такого варианта асинхронного электродвигателя, что определяет крайне редкие случаи ее практической реализации.
ОСОБЕННОСТИ СИНХРОННОГО ДВИГАТЕЛЯ
Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (б), приводящий ротор 3 во вращение.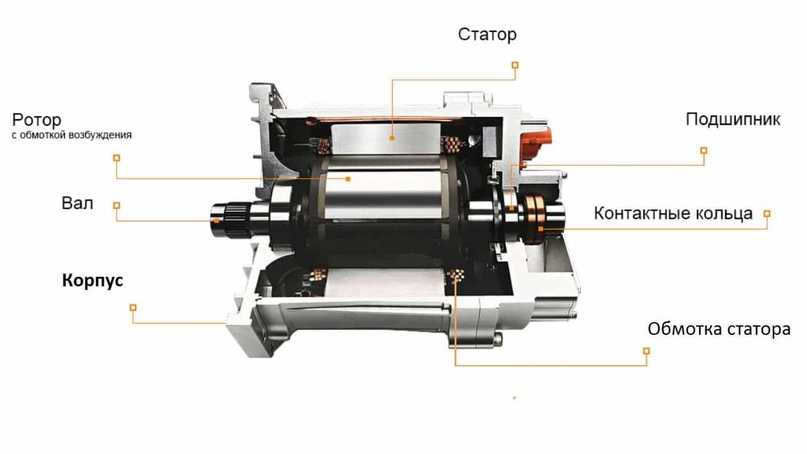 Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объясняется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объясняется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
НАЗНАЧЕНИЕ СИНХРОННОГО ДВИГАТЕЛЯ
Синхронные машины используют главным образом в качестве источников электрической энергии переменного тока; их устанавливают на мощных тепловых, гидравлических и атомных электростанциях, а также на передвижных электростанциях и транспортных установках (тепловозах, автомобилях, самолетах). Конструкция синхронного генератора определяется в основном типом привода. В зависимости от этого различают турбогенераторы, гидрогенераторы и дизель-генераторы.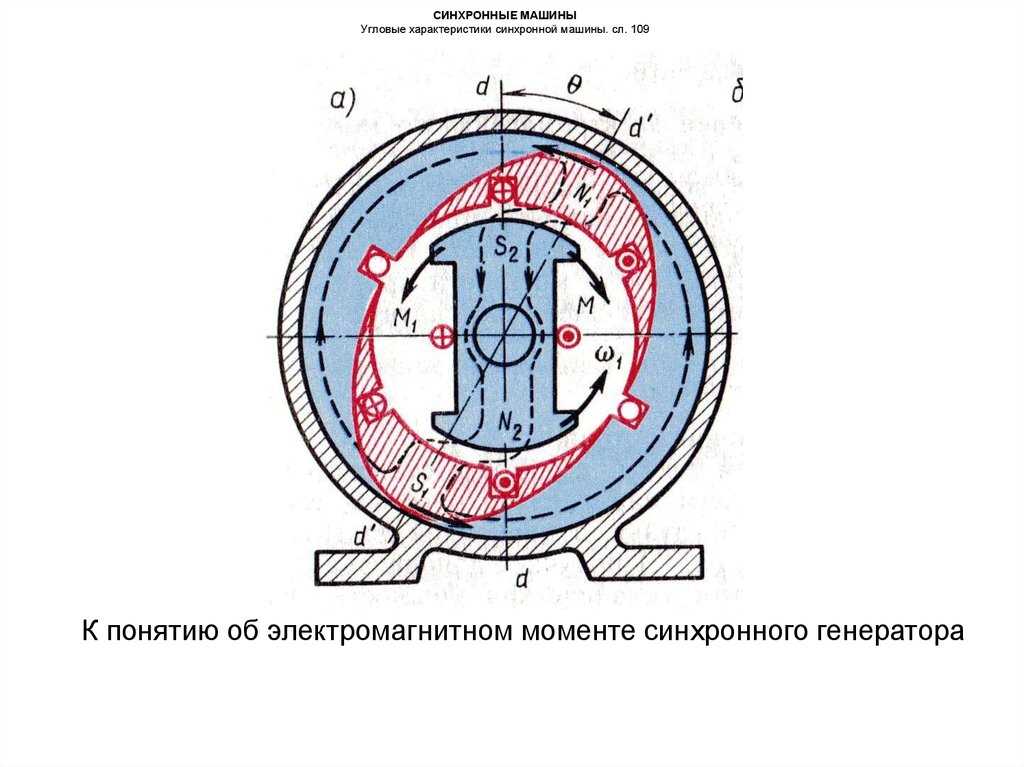 Турбогенераторы приводятся во вращение паровыми или газовыми турбинами, гидрогенераторы — гидротурбинами, дизель-генераторы — двигателями внутреннего сгорания. Синхронные машины широко используют и в качестве электродвигателей при мощности 100 кВт и выше для привода насосов, компрессоров, вентиляторов и других механизмов, работающих при постоянной частоте вращения. Для генерирования или потребления реактивной мощности с целью улучшения коэффициента мощности сети и регулирования ее напряжения применяют синхронные компенсаторы.
Турбогенераторы приводятся во вращение паровыми или газовыми турбинами, гидрогенераторы — гидротурбинами, дизель-генераторы — двигателями внутреннего сгорания. Синхронные машины широко используют и в качестве электродвигателей при мощности 100 кВт и выше для привода насосов, компрессоров, вентиляторов и других механизмов, работающих при постоянной частоте вращения. Для генерирования или потребления реактивной мощности с целью улучшения коэффициента мощности сети и регулирования ее напряжения применяют синхронные компенсаторы.
В электробытовых приборах (магнитофонах, проигрывателях, киноаппаратуре) и системах управления широкое применение получили различные синхронные микромашины — с постоянными магнитами, индукторные, реактивные, гистерезисные, шаговые.
СПАСИБО ЗА ВНИМАНИЕ!
Асинхронный двигатель и синхронный что лучше. Что такое синхронный двигатель
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.
Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).
Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин.
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.
При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.
Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Чем синхронный двигатель от асинхронного отличается такой вопрос часто задают на различных форумах.
Основное отличие в том, что у асинхронного двигателя скорость вращения ротора всегда меньше, скорости вращения магнитного поля в то время как у синхронного же двигателя скорость ротора или равна или в особенных случаях конструкции кратна скорости ротора.
А так много отличий на самомм деле, но это самые основные из-за них они собственно говоря так и называются.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Т.е это достаточно дешевый двигатель/, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять.
Отличить можно по количеству оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n 1 , с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n 1 , с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент . Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Ф в) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Ф в). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента М вн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента М вн. Максимум момента М max
Максимум момента М max
соответствует углу? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент М вн, приложенный к валу электродвигателя, станет больше М max , то двигатель под действием внешнего момента М вн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента М вн смещается на угол? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора М вн изменяется лишь угол? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента . Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска . Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Синхронный двигатель не имеет начального пускового момента . Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска . Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Рис. 293. Схема асинхронного пуска синхронного двигателя;
293. Схема асинхронного пуска синхронного двигателя;
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения
Синхронный двигатель, в отличии от своего асинхронного собрата, имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью (например, компрессоры, вентиляторы, насосы и прочее).
Как устроен синхронный двигатель?
В статоре такого электроприбора имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения. Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Синхронный двигатель и его разновидности
В основном все отличия в конструктивном исполнении такого устройства — это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (его обычно называют «явнополюсный»), и с неявно выраженными полюсами (так называемый «неявнополюсный»). Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения. Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Синхронный двигатель и принцип его работы
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Синхронный двигатель и его особенности
Нельзя не упомянуть о некоторых специфических моментах. Например, о том, что у таких машин нет пускового момента. Это происходит по той причине, что из-за своей инертности ротор просто не успевает развить нужное количество оборотов. Поэтому в настоящее время часто применяют асинхронный пуск таких двигателей.
Поэтому в настоящее время часто применяют асинхронный пуск таких двигателей.
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора.
 Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем.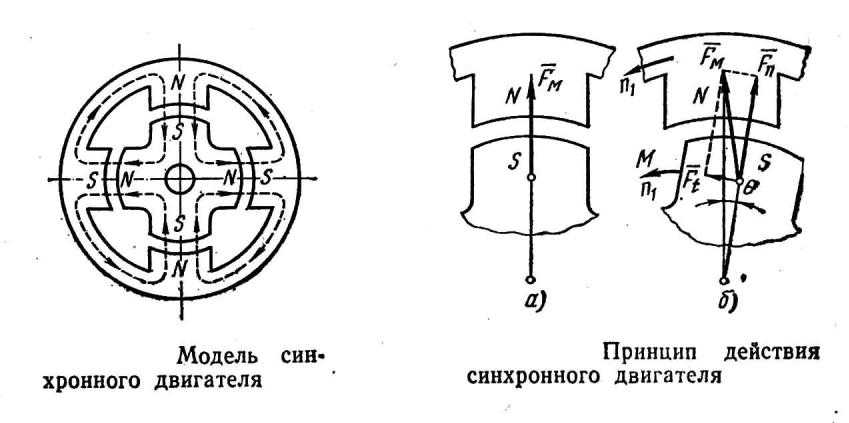 Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.

- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.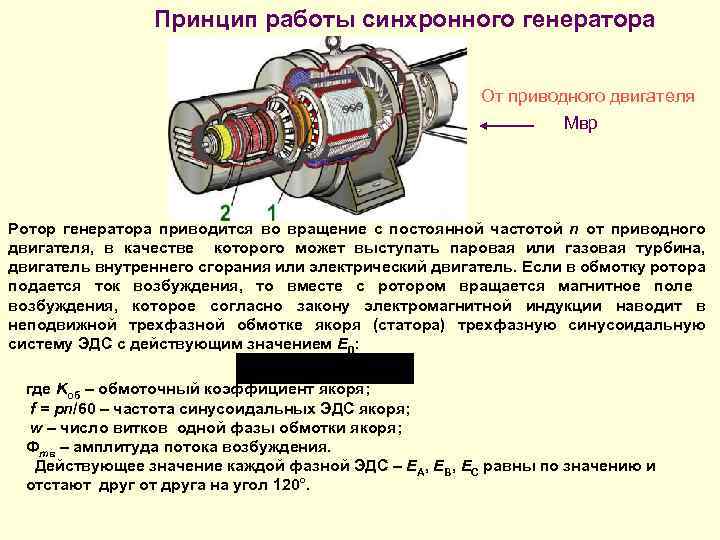
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.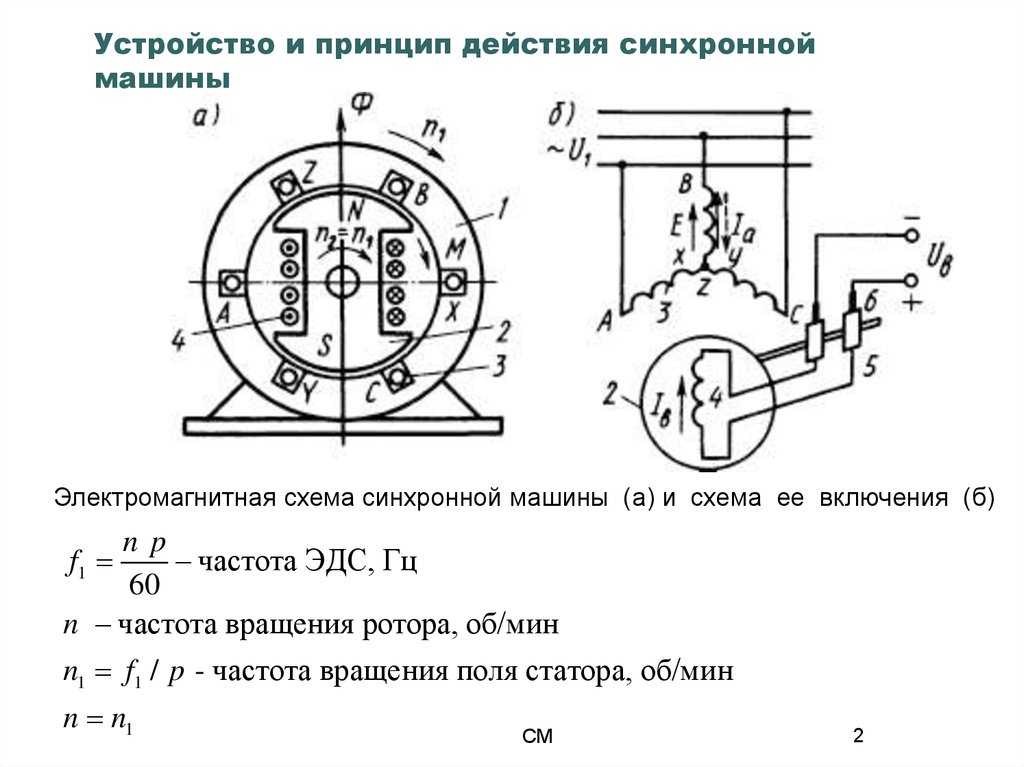 д.
д.
Синхронные двигатели | Эксплуатация электрических машин и аппаратуры | Архивы
- 6кВ
- 0,4кВ
- трансформатор
- эксплуатация
- подстанция
- 10кВ
- заземление
Содержание материала
- Эксплуатация электрических машин и аппаратуры
- Волокнистые, стеклянные и асбестовые материалы, бумага
- Проводниковые материалы
- Сведения об электрических машинах переменного тока
- Однослойные трехфазные обмотки машин переменного тока
- Трехфазные двухслойные обмотки машин переменного тока
- Обмотки однофазных машин переменного тока
- Асинхронные двигатели
- Принцип работы асинхронного двигателя
- Пуск трехфазных асинхронных двигателей
- Регулировка скорости вращения асинхронных двигателей
- Однофазные асинхронные двигатели
- Синхронные машины
- Принцип работы синхронного генератора
- Характеристики синхронных генераторов
- Синхронные двигатели
- Трансформаторы
- Работа трансформаторов
- Трехфазные трансформаторы
- Специальные трансформаторы
- Другие специальные трансформаторы
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Сварочные генераторы
- Рубильники и пакетные выключатели
- Контакторы и магнитные пускатели
- Реостаты
- Предохранители
- Работа трехфазных асинхронных двигателей в однофазных сетях
- Изменение скорости вращения ротора асинхронного двигателя
- Особые режимы работы трехфазного асинхронного двигателя
- Параллельная работа трансформаторов
- Параллельная работа синхронных генераторов
- Система технического обслуживания электрооборудования
- Условия эксплуатации и выбор электрооборудования
- Хранение, транспортировка и монтаж электрооборудования
- Техническое обслуживание асинхронных двигателей
- Проверка сети при пуске асинхронных двигателей
- Эксплуатационные характеристики асинхронного двигателя
- Дефектовка собранного асинхронного двигателя
- Техническое обслуживание генераторов
- Техническое обслуживание трансформаторов
- Аварийные перегрузки, короткие замыкания, несимметричные режимы трансформаторов
- Эксплуатация масла, влагообмен в трансформаторах
- Текущий ремонт трансформаторов
- Техническое обслуживание сварочного электрооборудования
- Устранение неисправностей сварочного оборудования
- Неисправности трехфазных асинхронных двигателей
- Различные неисправности трехфазных асинхронных двигателей
- Неисправности машин постоянного тока
- Неисправности трансформаторов
- Неисправности сварочных аппаратов
- Неисправности реакторов, пускателей и контакторов
- Сушка электромашин
- Сушка обмоток силовых трансформаторов
- Определение качества трансформаторного масла
- Маркировка выводных концов электромашин и трансформаторов
- Опытное определение группы трансформатора
- Определение паспорта электромашин и трансформаторов
- Механические неисправности электромашин
- Неисправности коллекторов
- Неисправности обмоток электромашин
- Повреждения обмоток электромашин
- Неисправности силовых трансформаторов
- Мастерская электрика
- Приборы, испытательные щиты, приспособлении и инструмент
- Технологическая планировка мастерской
- Техника безопасности, поражение током
- Помещения и электрооборудование по признаку электробезопасности
- Заземление электроустановок
- Ответственность за безопасность при обслуживании и ремонте электроустановок
- Эксплуатация электроустановок
- Некоторые случаи травматизма
Страница 16 из 74
Конструкция синхронного двигателя аналогична конструкции синхронного генератора.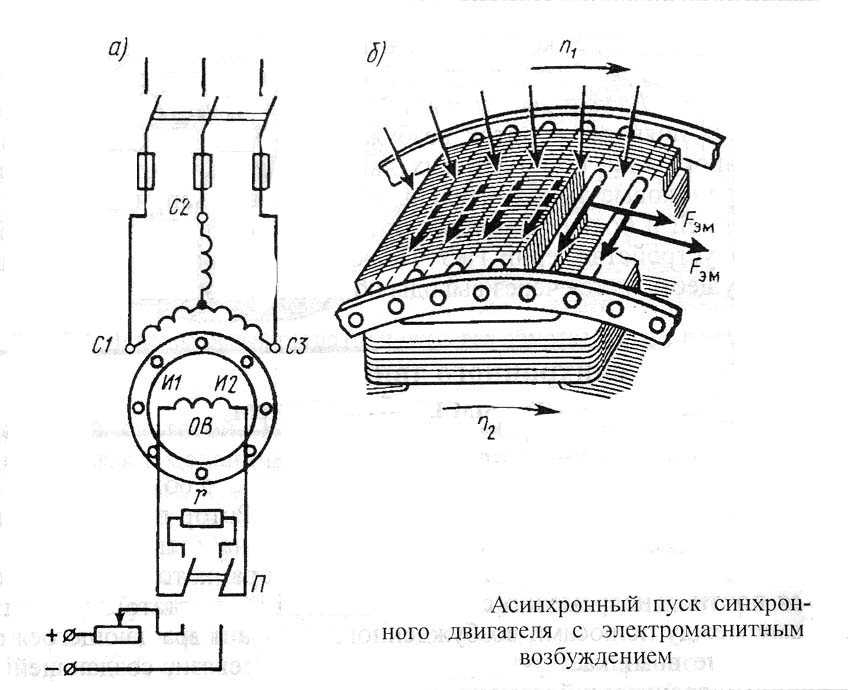 Ротор обычно явнополюсной. На роторе, в его полюсных башмаках обязательно укрепляют пусковую обмотку, она подобна успокоительной обмотке генератора. Для улучшения пусковых характеристик воздушный зазор в двигателях делают несколько меньше зазора в генераторе.
Ротор обычно явнополюсной. На роторе, в его полюсных башмаках обязательно укрепляют пусковую обмотку, она подобна успокоительной обмотке генератора. Для улучшения пусковых характеристик воздушный зазор в двигателях делают несколько меньше зазора в генераторе.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного потока статора с магнитным потоком ротора (индуктора). При протекании трехфазного тока по трехфазной обмотке статора образуется вращающееся магнитное поле. Скорость вращения его при заданной частоте тока для данного двигателя величина постоянная. Магнитное поле статора жестко сцепляется с магнитным полем ротора; северный полюс статора будет против южного полюса ротора и увлечет в своем вращении ротор двигателя. Ротор двигателя вращается с постоянной скоростью независимо от величины нагрузки.
В синхронном генераторе магнитное поле статора следует за магнитным полем ротора, то есть в этом процессе ведущий — ротор. Поле статора — ведомое.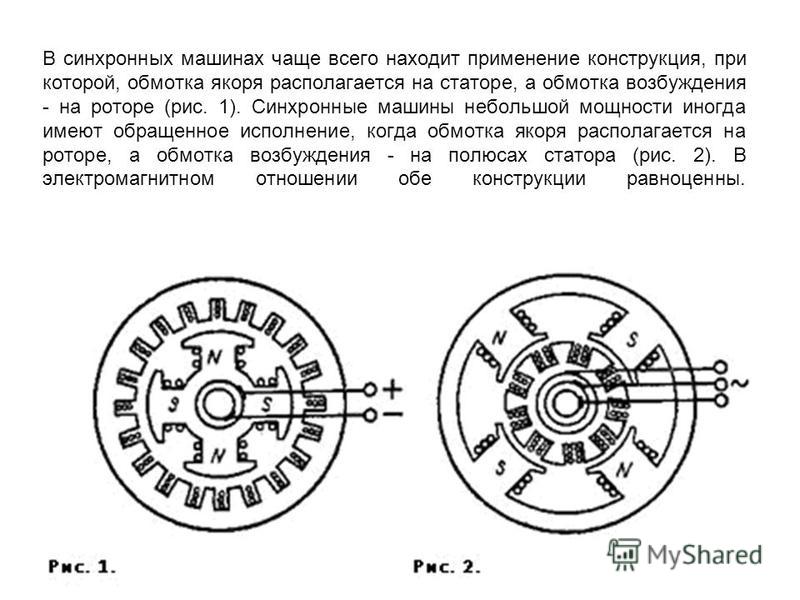 Ось магнитного потока ротора в генераторе в пространстве опережает ось магнитного потока статора. Этот угол опережения увеличивается с ростом активной нагрузки генератора. В синхронном двигателе магнитное поле ротора следует за магнитным полем статора. Здесь поле статора ведущее, а ротор ведомый. В двигателе ось магнитного потока ротора в пространстве при своем вращении отстает от оси магнитного потока статора. Этот угол отставания возрастает с увеличением нагрузки двигателя (тормозного момента на валу).
Ось магнитного потока ротора в генераторе в пространстве опережает ось магнитного потока статора. Этот угол опережения увеличивается с ростом активной нагрузки генератора. В синхронном двигателе магнитное поле ротора следует за магнитным полем статора. Здесь поле статора ведущее, а ротор ведомый. В двигателе ось магнитного потока ротора в пространстве при своем вращении отстает от оси магнитного потока статора. Этот угол отставания возрастает с увеличением нагрузки двигателя (тормозного момента на валу).
В синхронных машинах угол раствора осей магнитного потока ротора и статора может увеличиться до 90°, при больших углах машина выпадает из синхронизма. В этом случае скорость ее уже не постоянная, она потребляет очень большой ток. защита должна быстро отключить двигатель от сети.
Синхронные двигатели характеризуются перегрузочной способностью, то есть отношением максимального момента к номинальному. Величина момента синхронных двигателей в отличие от асинхронных зависит от величины питающего напряжения в первой степени, то есть уменьшения напряжения, например вдвое, сопровождается уменьшением и максимального момента вдвое. Перегрузочная способность синхронного двигателя очень существенно зависит от тока возбуждения. С уменьшением тока возбуждения уменьшается максимальный момент двигателя, а угол раствора осей потоков увеличивается. При некотором, предельно наименьшем токе возбуждения максимальный момент двигателя будет равен тормозному моменту, а угол раствора — 90. Дальнейшее уменьшение тока возбуждения приведет к тому, что максимальный момент двигателя будет меньше тормозного, двигатель выпадет из синхронизма.
Перегрузочная способность синхронного двигателя очень существенно зависит от тока возбуждения. С уменьшением тока возбуждения уменьшается максимальный момент двигателя, а угол раствора осей потоков увеличивается. При некотором, предельно наименьшем токе возбуждения максимальный момент двигателя будет равен тормозному моменту, а угол раствора — 90. Дальнейшее уменьшение тока возбуждения приведет к тому, что максимальный момент двигателя будет меньше тормозного, двигатель выпадет из синхронизма.
Коэффициент мощности синхронного двигателя может принимать разные значения в зависимости от тока возбуждения.
Коэффициент мощности и ток статора в синхронном двигателе регулируют изменением тока возбуждения. Если в асинхронных двигателях при постоянном напряжении, частоте и моменте сопротивления ток статора и коэффициент мощности вполне определенные величины, то в синхронных двигателях эти величины при тех же условиях можно изменить в широких пределах.
Можно ток возбуждения отрегулировать так, чтобы cos φ двигателя стал равным единице. Такой двигатель называют нормально возбужденным. При уменьшении тока возбуждения cos φ уменьшается, реактивную мощность двигатель потребляет из сети, которая и идет на покрытие недостатка собственного возбуждения.
Такой двигатель называют нормально возбужденным. При уменьшении тока возбуждения cos φ уменьшается, реактивную мощность двигатель потребляет из сети, которая и идет на покрытие недостатка собственного возбуждения.
Если ток возбуждения увеличивать ст значения, соответствующего нормальному возбуждению, cos φ уменьшается. В этом случае реактивная мощность отдается двигателем в сеть вследствие избытка возбуждения.
Возможность регулирования коэффициента мощности наряду с постоянством скорости вращения — важное качество синхронного двигателя в сравнении с асинхронным. При любой нагрузке синхронного двигателя сравнительно просто получить cos φ = 1, а при большем токе возбуждения он будет отдавать реактивную мощность в сеть, которую потребляют асинхронные двигатели и трансформаторы.
Ток статора синхронного двигателя в зависимости от тока возбуждения определяют (U-образной характеристикой.
U-образная характеристика представляет зависимость тока двигателя от тока возбуждения при постоянных величинах: напряжении, частоте и моменте нагрузки на валу.
Рис. 52/ U-образные характеристики синхронного двигателя:
1 — регулировочная характеристика при cos φ = L; 2 — линия статической устойчивости.
На рисунке 52 представлены (U-образные характеристики синхронного двигателя при трех значениях момента. Каждая U-образная характеристика имеет низшую точку, которая соответствует нормальному возбуждению двигателя, то есть здесь cos φ = 1. Ордината низшей точки U-образной характеристики представляет активную составляющую тока статора при данном моменте двигателя. Левая ветвь характеристики соответствует недовозбужденному режиму двигателя, когда он работает с отстающим током при потреблении реактивной мощности из сети. Правая ветвь характеристики соответствует режиму перевозбуждения двигателя, когда он работает с опережающим током при отдаче реактивной мощности в сеть.
Чем больше момент двигателя, тем выше U-образная характеристика и тем правее будет низшая ее точка. Кривая 1, соединяющая разгружена от реактивной мощности, cos φ станет близким к единице, пропускная способность линии увеличится.
С помощью компенсатора можно регулировать напряжение в конце линии передачи. Если напряжение в конце линии уменьшится, то перевозбуждением компенсатора можно напряжение довести до номинального. В случае повышения напряжения в конце линии свыше номинального, что может быть при малой нагрузке, недовозбуждением компенсатора можно снизить напряжение до требуемого уровня. Синхронный компенсатор даже при постоянном токе возбуждения способен в некоторой мере стабилизировать напряжение линии.
Синхронные компенсаторы — это крупные электрические машины мощностью в тысячи и десятки тысяч киловольт-ампер. Включают в сеть синхронные компенсаторы по методу асинхронного пуска синхронных двигателей. Очень крупные компенсаторы пускают разгонным двигателем.
- Назад
- Вперед
- Назад
- Вперед
- Вы здесь:
- Книги
- Архивы
- Эксплуатация электрических машин и аппаратуры
 org/ListItem»>
Главная
org/ListItem»>
ГлавнаяЧитать также:
- Наладка электроустановок
- Монтаж, эксплуатация и ремонт сельскохозяйственного электрооборудования
- Электрооборудование сельского хозяйства
- Электрические сети промышленных предприятий
- Монтаж электрических установок
Как отличить асинхронный двигатель от двигателя постоянного тока » сайт для электриков
Устройство, принцип действия асинхронного двигателя
Асинхронный двигатель – это машина переменного тока. Слово «асинхронный» означает неодновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
Слово «асинхронный» означает неодновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
Рис.1. Устройство асинхронных двигателей
Статор – неподвижная часть машины (рис. 1, а ). Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали (рис. 1, б. в ). В пазах ротора укладывают обмотку, в зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни (рис. 1, г ), соединенные с торцов кольцами из этого же материала («беличья клетка»).
Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни (рис. 1, г ), соединенные с торцов кольцами из этого же материала («беличья клетка»).
У фазного ротора (см. рис. 1, в ) в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Вращающееся магнитное поле это постоянный поток, вращающийся в пространстве с постоянной угловой скоростью.
Необходимыми условиями возбуждения вращающегося магнитного поля являются:
— пространственный сдвиг осей катушек статора,
— временной сдвиг токов в катушках статора.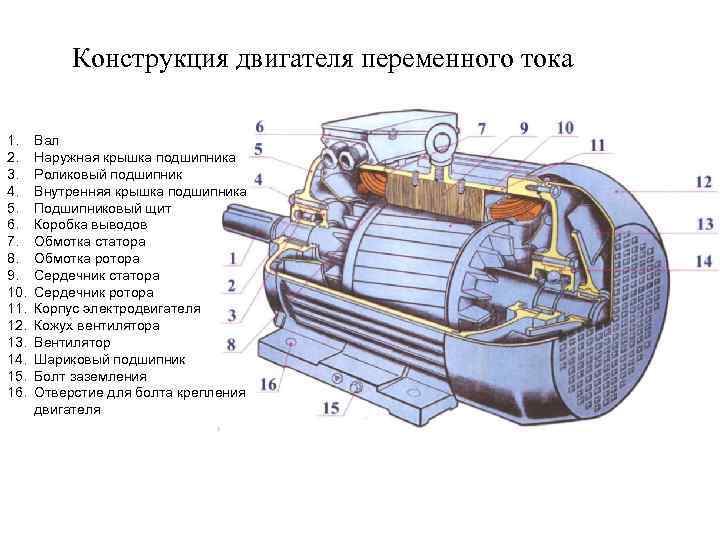
Первое требование удовлетворяется соответствующим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки смещены в пространстве на угол 120º. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки создают магнитное поле, вращающееся относительно статора с частотой n1. об/мин, которая называется синхронной частотой вращения двигателя:
где f1 – частота тока сети, Гц;
р – число пар полюсов магнитного поля.
При стандартной частоте тока сети Гц частота вращения поля по формуле (1) и в зависимости от числа пар полюсов имеет следующие значения:
Вращаясь, поле пересекает проводники обмотки ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Частота вращения ротора в двигательном режиме асинхронной машины всегда меньше частоты вращения поля, т.е. ротор «отстает» от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения
Частота вращения ротора в двигательном режиме асинхронной машины всегда меньше частоты вращения поля, т.е. ротор «отстает» от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения
где n2 – частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой к 0 (холостой ход).
185.154.22.117 studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
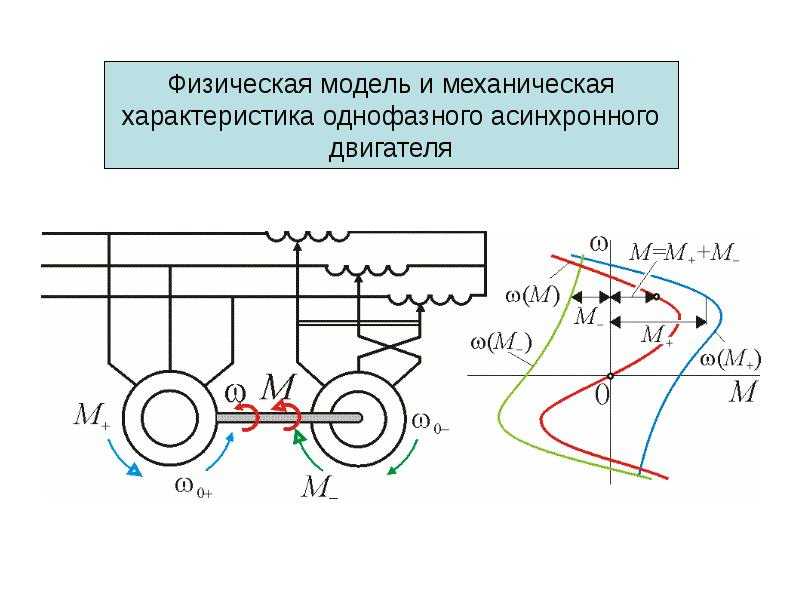
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.

Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
Особенности
По способу взаимодействия ротора и вращающегося магнитного поля, устройства делятся на два вида – синхронные и асинхронные. В первом случае скорости вращения поля и ротора совпадают, во втором – отличаются.
Синхронная электрическая
Установки данного типа одинаково широко применяются в роли двигателей и генераторов. Подобные машины используются на всех электростанциях. Ротор имеет собственные магнитные полюсы.
Ротор представляет собой электромагнит на Iпост от стороннего источника, реже — постоянный магнит. Сторонним источником Iпост. обычно выступает генератор, смонтированный на валу машины. Но в некоторых случаях используют и аккумулятор.
Сторонним источником Iпост. обычно выступает генератор, смонтированный на валу машины. Но в некоторых случаях используют и аккумулятор.
Вращение обусловлено взаимодействием вращающегося магнитного поля статора и собственного поля ротора. Первое увлекает за собой второе, заставляя подвижный элемент вращаться с той же скоростью (режим двигателя). Если же вращать ротор сторонней механической силой, на выводах обмотки статора получится 3-фазное напряжение (режим генератора).
Асинхронная электрическая
Данное устройство в основном используется как двигатель. В сравнении с синхронной имеет более простую конструкцию, чем и объясняется широкое распространение. Ротор собственных магнитных полюсов не имеет, поскольку его магнитное поле является наведенным (у синхронных — собственное).
Асинхронные машины делятся на два вида:
- коллекторные;
- бесколлекторные.
Первые более разнообразны по характеристикам, но из-за наличия такого дорогого и малонадежного узла, коим является коллектор, сфера их использования ограничена.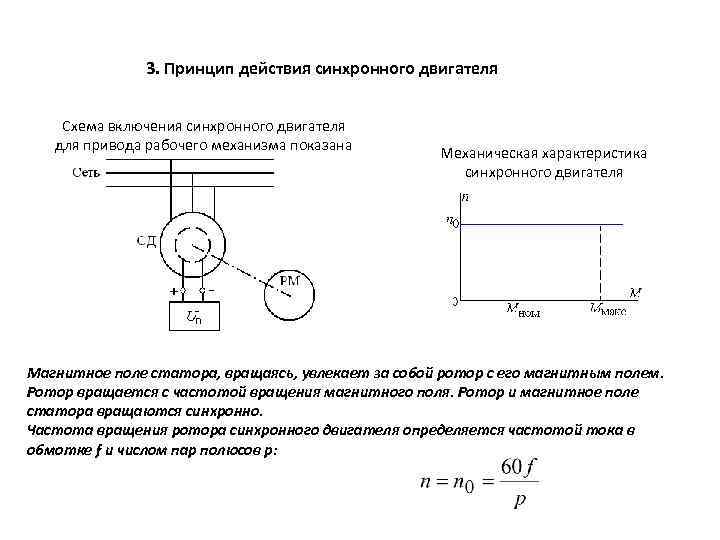
Бесколлекторные устройства наиболее распространены, они делятся на два вида:
- с короткозамкнутым ротором;
- с фазным ротором.
Обмотка первого представляет собой обойму из медных или алюминиевых стержней в форме беличьего колеса, тогда как тело самого элемента изготовлено из ферромагнитной стали и представляет собой сердечник.
Вместе сердечники ротора и статора образуют магнитопровод, а имеющиеся на них обмотки работают подобно трансформаторным:
- в обмотках статора при подключении его клемм к 3-фазному напряжению формируется вращающееся магнитное поле, как было описано выше;
- для ротора движущееся относительно него вращающееся магнитное поле является переменным, отчего в его обмотке, согласно закону электромагнитной индукции, наводится ЭДС и возникает ток;
- он создает в обмотке ротора магнитное поле, которое взаимодействует с полем статора. Иными словами, возникает действующая на стержни ротора амперова сила. Он начинает вращаться вслед за полем статора.
 Он начинает вращаться вслед за полем статора.
Он начинает вращаться вслед за полем статора.Очевидно, что скорость вращения ротора V не может быть равна аналогичному параметру поля статора V0, поскольку при таких условиях последнее уже не будет переменным для роторной обмотки.
Потому данный двигатель и называют асинхронным. Если при вращении ротор обгоняет поле статора, машина переходит в режим генератора. Разность V и V0 характеризуется коэффициентом скольжения S = (V0 – V) / V0.
Короткозамкнутый ротор
У двигателей с короткозамкнутым ротором есть три недостатка, ограничивающих сферу применения:
- небольшой пусковой момент: при активации полюсы наведенного в роторе магнитного поля находятся под полюсами вращающегося поля статора;
- высокий пусковой ток: в 5-15 раз выше рабочего;
- в случае приложения нагрузки на вал более максимального момента двигатель останавливается.
Обмотка фазного ротора устроена подобно статорной. В момент пуска к ней подключается внешнее сопротивление, отчего взаимное расположение магнитных полей подвижного и неподвижного элементов меняется — полюса одного выводятся из-под полюсов другого. Возникает высокий момент трогания (или пусковой).
Возникает высокий момент трогания (или пусковой).
Синхронные и асинхронные электродвигатели
Синхронные и асинхронные электромоторы имеют общие условия для своей работы. Для этого необходимо магнитное поле, максимальная величина которого перемещается в пространстве. Такое поле может быть создано двумя или большим числом обмоток. Обычные конструкции синхронных и асинхронных электромоторов содержат две или три обмотки.
Они размещаются на массивных ферримагнитных сердечниках, усиливающих магнитное поле. Для трёх обмоток применяется трёхфазное напряжение, для двух обмоток – двухфазное или одна фаза с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключить и трёхфазные двигатели.
Если ротор электромотора создаёт постоянное магнитное поле, либо от постоянных магнитов, либо от встроенного в ротор источника питания постоянного тока, либо от внешнего источника питания постоянного тока через кольца со щётками такой двигатель является синхронным. В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.
В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.
Ротор асинхронного двигателя работает как вторичная обмотка трансформатора, которая замкнута накоротко. Но ток в его роторе может возникнуть только при более медленном вращении в сравнении с магнитным полем статора. Такое различие скоростей называется скольжением. Простота конструкции и соответствующая надёжность делают асинхронный электромотор наиболее широко используемым.
Предыстория.
Якоби Борис Семенович
Уже в 1821 году, знаменитый британский ученый Майкл Фарадей продемонстрировал принцип преобразования электромагнитным полем электрической энергии в механическую энергию. Установка состояли из подвешенного провода, которых окунался в ртуть. Магнит устанавливался посередине колбы с ртутью. При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
Эту модель двигателя часто демонстрировали в школах и университетах. Данный двигатель считается самым простым видом из всего класса электродвигателей. Впоследствии он получил продолжение в виде Колеса Барлова. Однако новое устройство носило лишь демонстрационный характер, поскольку вырабатываемые им мощности были слишком малы.
Ученые и изобретатели работали над двигателем с целью использования его в производственных нуждах. Все они стремились к тому, чтобы сердечник двигателя двигался в магнитном поле вращательно-поступательно, на манер поршня в цилиндре паровой машины. Русский изобретатель Б.С. Якоби сделал все гораздо проще. Принцип работы его двигателя заключался в попеременном притяжении и отталкивании электромагнитов. Часть электромагнитов были запитаны от гальванической батареи, и направление течения тока в них не менялась, а другая часть подключалась к батарее через коммутатор, благодаря которому изменялось направление течения тока через каждый оборот.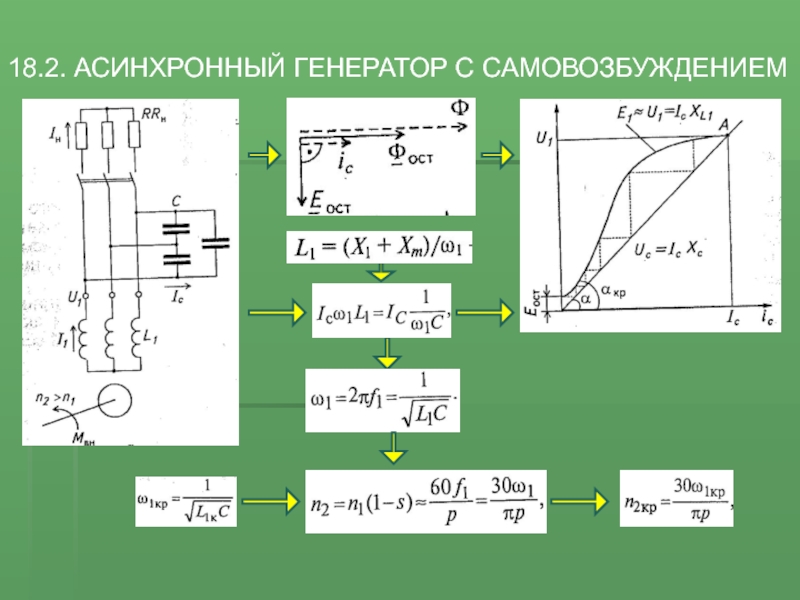 Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.
Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.
электродвигатель Бориса Якоби
Изначально мощность двигателя была небольшой и составляла всего 15 Вт, после доработок, Якоби удалось довести мощность до 550 Вт.. 13 сентября 1838 году, лодка, оборудованная этим двигателем, плыла с 12 пассажирами по Неве, против течения, развивая при этом скорость в 3 км/ч. Двигатель был запитан от большой батареи, состоящей из 320 гальванических элементов. Мощность современных электрических двигателей превышает 55 кВт. По вопросом прибретения электрических двигателей смотрите здесь.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в ртуть. Постоянный магнит был установлен в середине ванны со ртутью. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русско-прусский учёный Б.С. Якоби пошёл иным путём. В 1834 г. он создал первый в мире практически пригодный электродвигатель со вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б.С. Якоби писал, что его двигатель несложен и «даёт непосредственно круговое движение, которое гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось восемь раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременно притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довёл мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
В 1839 г. Якоби построил лодку с электромагнитным двигателем, который от 69 элементов Грове развивал 1 лошадиную силу и двигал лодку с 14 пассажирами по Неве против течения. Это было первое применение электромагнетизма к передвижению в больших размерах.
Это было первое применение электромагнетизма к передвижению в больших размерах.
Частотно-регулируемый привод
В первом приближении существенных отличий между этими приводами не так и много; однако, при более детальном рассмотрении, выявляются характерные особенности приводов и различие физических принципов функционирования. Дале в статье раскрываются аспекты отличия приводов по следующим пунктам:
- характеристики двигателей, как электромеханических преобразователей
- характеристики преобразователей электрической энергии
- 4-х квадрантные приводы
- влияние на внешнюю среду
- модернизация приводов постоянного тока
Преимущества постоянного тока
- Главное преимущество электрической энергии постоянного тока – это отсутствие реактивной мощности. А это значит, что вся мощность, выработанная генератором, потребляется нагрузкой за вычетом потерь в проводах.
- Постоянный ток в отличие от переменного протекает по всему сечению проводника.

Указанные два пункта приводят к тому, что если передавать одну и ту же мощность при равных напряжениях постоянным и переменным токами, то потери мощности электроэнергии постоянным током были бы почти в два раза меньше, чем при переменном токе.
К тому же, если рассматривать такие бытовые электронные устройства как ноутбуки, компьютеры, телевизоры и т. п., то все они имеют блоки питания, преобразующие переменное напряжение 220 В (230 В) в постоянное напряжение более низкой величины. А такие преобразования связаны с частичной потерей мощности.
Кроме того, как было сказано ранее, трехфазный асинхронный двигатель (АД) можно подключить напрямую к сети 380 В, что вполне оправдано в том случае, когда не требуется изменять режим работы двигателя. Но если необходимо изменять частоту вращения его вала, то нужно на обмотки статора подавать напряжение, частота и амплитуда которого должны изменяться пропорционально, согласно закону Костенка. Для этого применяют трехфазные автономные инверторы (АИ), чаще всего инверторы напряжения.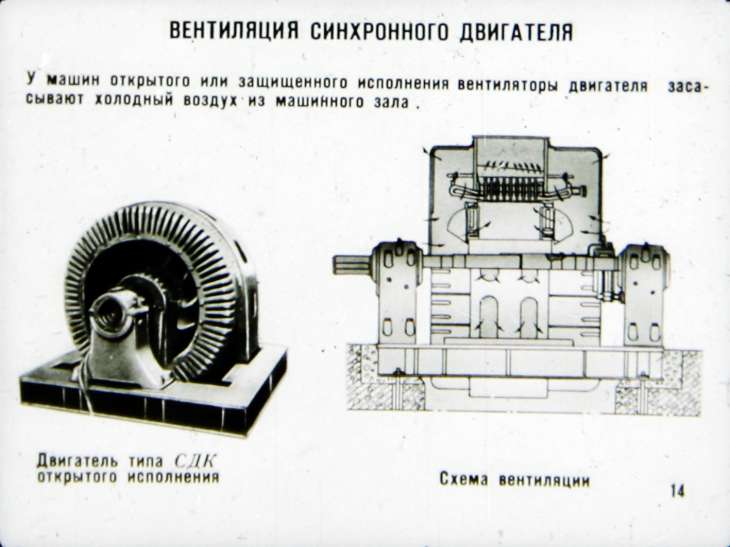 Такие инверторы должны получать питание от источника постоянного напряжения.
Такие инверторы должны получать питание от источника постоянного напряжения.
Также следует заметить, что последним временем начали очень широко применяться солнечные батареи, которые вырабатывают постоянный ток. К тому же, значительно возросла мощность аккумуляторных батарей и повысилась емкость суперконденсаторов, которые также относятся к источникам постоянного тока и с каждым днем находят все большее практическое применение.
Двигатель переменного тока работа
Из названия следует, что особенностью данного рода электрических двигателей (ЭД) является то, что они работают на переменном токе. Если при постоянном токе электрические частицы следуют только в одном направлении, и могут в определенный момент времени менять свою интенсивность (разность потенциалов или напряжение), то у переменного тока имеются другие характеристики — такие как частота, форма и длительность. Что повлияло на конструкцию и принцип действия электродвигателей переменного тока. В статье разберём основные аспекты работы ЭД переменного тока.
Двигатель переменного тока классификация и принцип работы
Электродвигатели переменного тока это электротехнические устройства, являющиеся своеобразными преобразователями электрической энергии, в основе принципа которых которых лежат электромагнитные силы Лоренца и явление электромагнитной индукции. работающие на переменном токе. ЭД и генераторы переменного тока по принципу действия классифицируют на синхронные и асинхронные. Что бы было понятно дальнейшее объяснение хочу поведать о следующем.
Главной отличительной чертой электрических машин переменного тока является то, что электрическую энергию преобразуют в механическую или наоборот, с помощью взаимодействие магнитных полей, одно из них является вращающимся, динамическим (генерируемое при движении переменного тока, а другое поле в статическое, постоянное. Поэтому, для получения движения ротора движущееся поле должно взаимодействовать с постоянным, что и создает механическое движение вала ЭД.
Общий принцип действия асинхронной электрической машины состоит в следующем.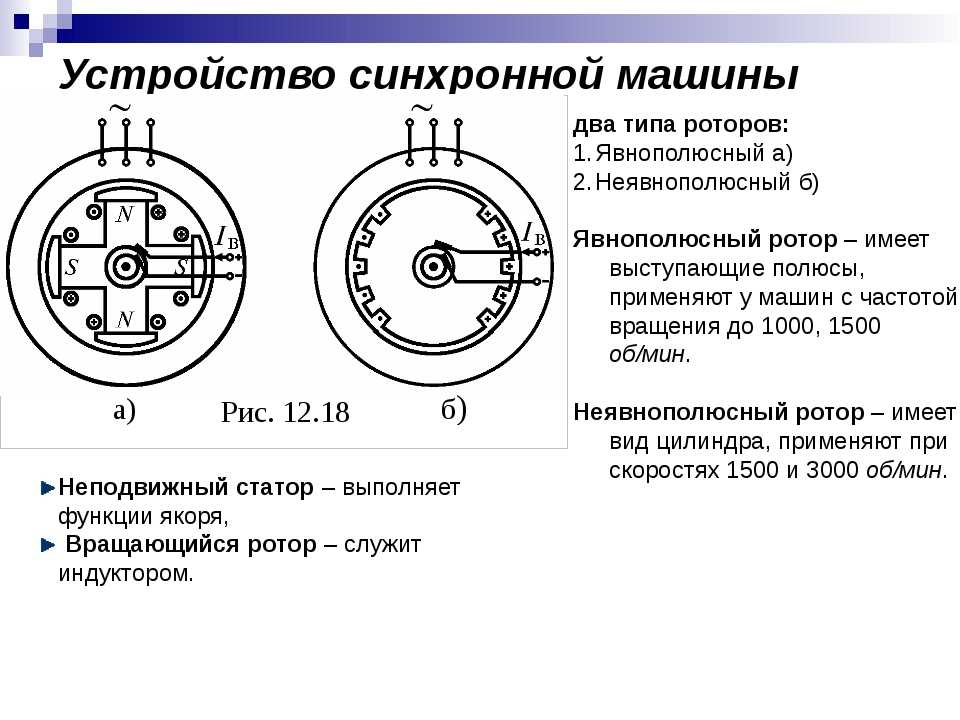 На статоре ЭД намотаны три обмотки, к которым подсоединены три фазы. Из курса электротехники мы знаем, что трехфазный ток это циклическое изменение величины тока и напряжения плавно перетекающее по синусойде. То есть, максимум мощности плавно перетекает из одной точки, обмотки в другую, понятно что, при этом, на противоположной стороне синусойды будет минимум мощности. Так вот при подачи трехфазного напряжения на обмотки статора асинхронного ЭД мы имеем в результате вращающееся магнитное поле, частота которого равна частоте питающей сети, в России это 50 Гц.
На статоре ЭД намотаны три обмотки, к которым подсоединены три фазы. Из курса электротехники мы знаем, что трехфазный ток это циклическое изменение величины тока и напряжения плавно перетекающее по синусойде. То есть, максимум мощности плавно перетекает из одной точки, обмотки в другую, понятно что, при этом, на противоположной стороне синусойды будет минимум мощности. Так вот при подачи трехфазного напряжения на обмотки статора асинхронного ЭД мы имеем в результате вращающееся магнитное поле, частота которого равна частоте питающей сети, в России это 50 Гц.
Из курса физики и общей электротехники мы знаем, что при движении проводника в переменное магнитное поле на его концах генерируется разность потенциалов, а если его концы подсоединить к какой нибудь цепи, то через нее, потечет ток, образующий вокруг себя свое собственное магнитное поле. Вот этот принцип работы и лежит в асинхронных электрических машинах. Внутри нее расположен короткозамкнутый ротор. Во вращающемся магнитном поле на нем появляется ЭДС и у него создается собственное магнитное поле, что и отталкивается от поля статора.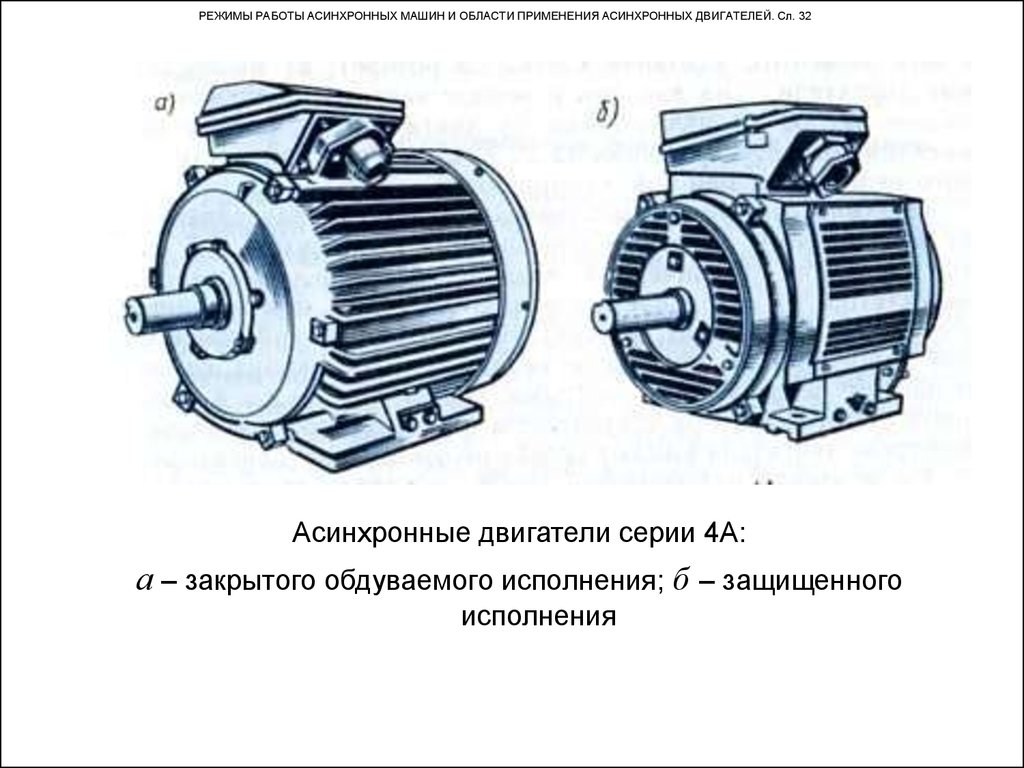
Асинхронный двигатель. Устройство и принцип работы
Работа асинхронного двигателя основана на принципах физического взаимодействия магнитного поля, появляющегося в статоре, с током, который это же поле генерирует в роторной обмотке.
У синхронных ЭД подобного отставания нет. Там поле индуктора как бы цепляется за вращающееся поле якоря, что и ведет к синхронной работе обоих магнитных полей. Если в асинхронниках статическое поле является следствием работы динамического, то в синхронниках в определённом смысле причины появления вращающегося полями и поля статического независимы друг от друга, но их взаимодействие и позволяет осуществлять работу ЭД переменного тока.
Cинхронный двигатель. Принцип работы
Синхронный двигатель – это разновидность электродвигателей, только работающих от переменного напряжения, при этом частота вращения ротора совпадает с частотой вращения магнитного поля. Именно поэтому она остается постоянной вне зависимости от нагрузки, т. к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор.
к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор.
Недостатки постоянного тока
Из выше изложенного следуют такие недостатки.
- Сложность повышения и снижения напряжения, то есть преобразования электроэнергии постоянного тока. В первую очередь это вызвано сложность конструкций преобразователей. Поскольку необходимы мощные полупроводниковые ключи, рассчитанные на высокое напряжение. Отсутствие которых приводит к большому числу последовательно и параллельно соединенных полупроводниковых приборов. В результате снижается надежность всего преобразователя, увеличивается стоимость и возрастают потери мощности.
- Электрические машины имеют более сложную конструкцию, поэтому менее надежны и более затратные, как в производстве, так и в эксплуатации.
- Сложности в развязке высокого и низкого напряжений.

Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
 Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.

Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
Выводы: постоянный или переменный ток
Несмотря на все преимущества постоянного тока, значительная сложность, вызванная преобразованием больших мощностей, главным образом сказывается сложность повышения и понижения постоянного напряжения, сводит на нет указанные выше преимущества. Поэтому, до тех пор, пока не будут разработаны полупроводниковые ключи огромной мощности и соответствующие преобразователи на их основе, переменный ток остается вне конкуренции. К тому же сейчас уже применяются четырехквадрантные преобразователи или активные выпрямители, позволяющие скомпенсировать реактивную составляющую нагрузки, что позволяет получить коэффициент мощности, равный почти единице.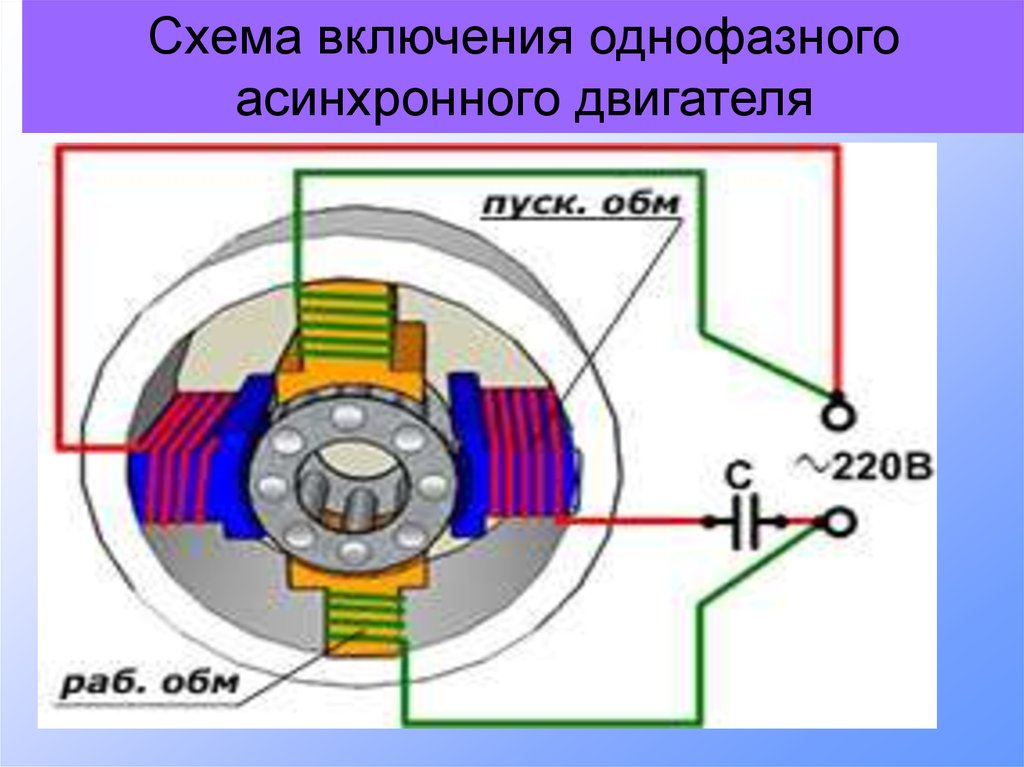 Благодаря чему исключается потребление реактивной мощности.
Благодаря чему исключается потребление реактивной мощности.
Как вы видите, однозначного ответа на вопрос, какой ток лучше: постоянный или переменный, не существует. Следует сравнивать все преимущества и недостатки для конкретного случая.
Альтернатор генератора: синхронный (щеточный) или асинхронный (бесщеточный)
11 октября 2016
4 комментария
Выбор генератора всегда был не самым простым вопросом и не так уж редко даже те, кто не понаслышке был знаком с такого рода оборудованием сталкивался с проблемами при выборе и уж что говорить о неподготовленном потребителе.
Существует множество аспектов при выборе генератора для лома или же для промышленного применения, все эти аспекты необходимо знать и в равной степени уделять им внимание для формирования верного выбора агрегата, чтобы он мог полностью удовлетворить Вас своей работой.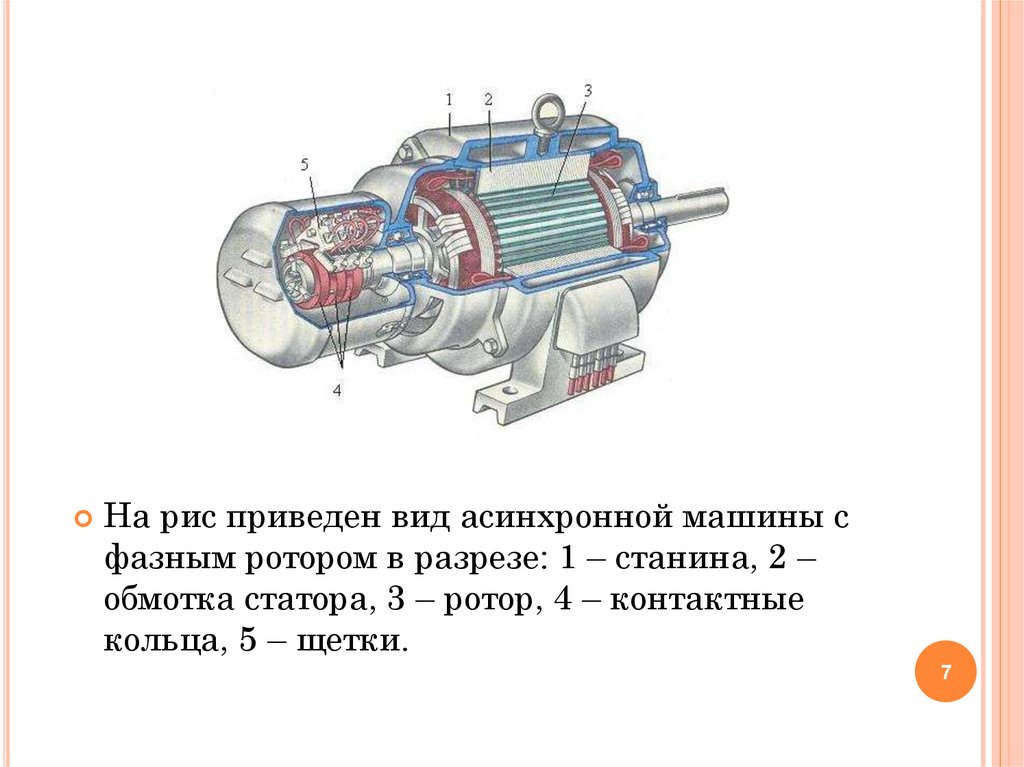
Сегодня мы будет говорить о том, чтобы верно подобрать генератор исходя от того, какой тип альтернатора на него установлен, для того, чтобы выбранный Вами бензиновый генератор обеспечивал Вас стабильным напряжением и не имел сбоев в своей работе. На первый взгляд вопрос очень сложный, но все не так страшно как кажется, выбор будет колебаться между всего двумя видами генераторов, синхронный, то есть щеточный, или асинхронный, бесщеточный альтернатор. Сегодня чаще всего покупаются модели именно с синхронным альтернатором, и почему Вы поймете далее. Надеемся, что сможем как можно лучше посвятить Вас в этот вопрос данной статьей.
Все об альтернаторе
Для начала стоит сказать немного о самом названии, в самом начале, когда технология, служащая для выработки электрического тока так и называлась, альтернатор, позже его стали называть генератор, весь, и альтернатор и двигатель и другие его части в сборе, это название проще и отражает саму суть работы такого агрегата – преобразование одного вида энергии в другой.
Что же касается самого альтернатора, то можно с полной уверенностью сказать что именно он является самой важной частью в любом генераторе, ведь именно от отвечает за самую важную работу этого агрегата, а именно преобразование кинетической работы, продуцируемой вращением вала двигателя в электрический ток переменного типа. Состоит альтернатор из подвижной и неподвижной части, как и любой электродвигатель, из статора и ротора.
Вращение в альтернаторе производится за счет электродвижущей силы, а для возникновения оной необходимо возбудить магнитное поле на обмотке. В этом плане между альтернаторами разнице нет, разница лишь в том, в какой способ электромагнитное поле передается на а обмотку статора, а именно на синхронные и асинхронные. В конструктивном плане разница в том, что синхронный альтернатор имеет обмотку на роторе, в то время как асинхронный не имеет ее и способы передачи соответственно у них разные.
Если не углубляться в теорию и рассмотреть строение альтернаторов, то коротко говоря у синхронного альтернатора более сложное строение за счет наличия и щеток, и обмоток на роторе и статоре, а асинхронный по конструкции более простой по конструкции.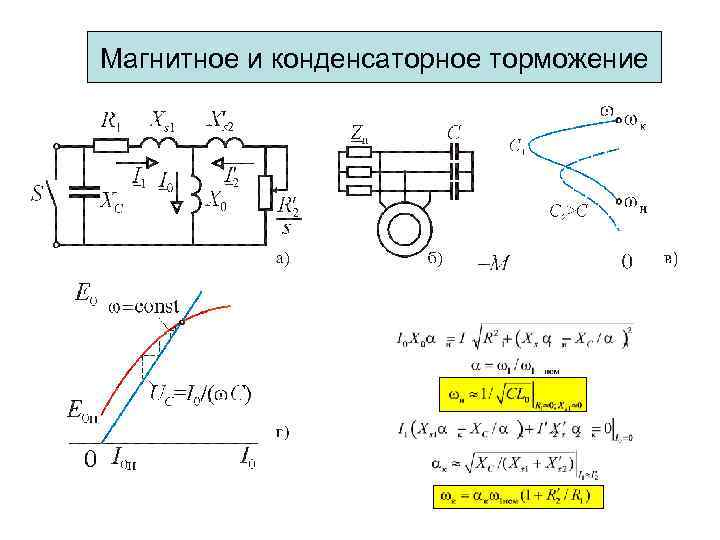 Считается, что последний менее надежен и менее вынослив, но это еще не делает его хуже, чем первый, все зависит от того, в каких условиях применяется генератор, есть множество факторов, которые могут поменять их местами или уровнять.
Считается, что последний менее надежен и менее вынослив, но это еще не делает его хуже, чем первый, все зависит от того, в каких условиях применяется генератор, есть множество факторов, которые могут поменять их местами или уровнять.
Достоинства синхронного альтернатора
Есть разница между тем, какой обмоткой будет обладать Ваш альтернатор, если же Вы хотите купить дизельный генератор для редких включений, и Вы не намерены подавать на него слишком большую нагрузку, то есть смысл сэкономить деньги и купить алюминиевый тип, если же работать генератор будет часто и должен будет выдерживать достаточно высокую нагрузку, то стоит подумать о медной обмотке. Альтернатор с медной обмоткой будет давать максимально качественный ток на выходе. Важная часть синхронного альтернатора – это щетки, именно они отвечают за снятие тока со статора на ротор. Главное преимущество такого альтернатора – это возможность выдерживать пиковые нагрузки и кратковременные перепады и выдавать качественное электричество на выходе, что и делает его столь востребованным. Также стоит отметить, что только с таким генератором будет совместима система AVR. Синхронный генератор будет более правильным выбором для работы в бытовых условиях, для запитки дома или другого объекта с чувствительной к перепадам технике. Стоит отметить и высокую стоимость такого оборудования, такой генератор будет стоить дороже генератора с асинхронным альтернатором.
Также стоит отметить, что только с таким генератором будет совместима система AVR. Синхронный генератор будет более правильным выбором для работы в бытовых условиях, для запитки дома или другого объекта с чувствительной к перепадам технике. Стоит отметить и высокую стоимость такого оборудования, такой генератор будет стоить дороже генератора с асинхронным альтернатором.
Недостатки синхронного альтернатора
Главным недостатком синхронного альтернатора можно назвать то, что он требует достаточно тщательного технического обслуживания. Щетки необходимо периодически заменять, график замены напрямую зависит от того, какие щетки установлены на альтернатор, угольные изнашиваются быстрее, медно-графитовые изнашиваются дольше. Помимо того, что у щеточного узла есть такой расходный материал как щетки, требующие периодической замены, сам альтернатор греется из-за трения щеток о ротор, и поэтому требует наличия охлаждения и тут есть побочный эффект.
Для охлаждения двигателя применяется вентилятор, который всасывает воздух и охлаждает обмотку, а вместе с воздухом он тянет и пыль, грязь и даже влагу. Более дорогие модели имеют достаточно высокий класс защиты для того, чтобы оградить альтернатор от влаги и пыли, но полностью защититься невозможно.
Более дорогие модели имеют достаточно высокий класс защиты для того, чтобы оградить альтернатор от влаги и пыли, но полностью защититься невозможно.
Преимущества асинхронного альтернатора
Преимущество асинхронного альтернатора заключается в том, что он имеет более простую конструкцию, а с этим и стоимость его меньше. Для движения подвижной части не требуется щетки для снятия электричества, достаточно магнитного поля и конденсаторов. Стоит отметить высокую степень защиты и отсутствие необходимости в сервисном обслуживании. Так как такой альтернатор нагревается намного меньше синхронного, отпадает необходимость в охлаждении, благодаря чему его конструкция более уплотненная, что позволило предотвратить попадание пыли, грязи и влаги внутрь альтернатора. Это делает его долговечным и надежным. Вес и физические размеры асинхронного альтернатора также намного меньше, чем у синхронного, так что и сам инверторный генератор компактнее. Также ощутимым преимуществом такого генератора будет в том, что его альтернатору не страшны короткие замыкания, что делает его хорошим вариантом для работы со сварочным оборудованием.
Недостатки асинхронного альтернатора
Помимо положительных сторон у него также есть и отрицательные стороны, которые заключаются в том, что выходящее напряжение не самого высокого качества, оно может скакать, а так как этот тип альтернатора несовместим с работой AVR, это может существенно отразится на его работе в бытовых условиях, например для запитки дома. Стоит отметить, что низкий уровень качества тока и скачки напряжения на выходе у асинхронного генератора вызвано тем, что он плохо переносит стартовые пиковые нагрузки от аппретуры, подключаемой к нему, и это может вызвать плачевные последствия для техники, очень чувствительной к перепадам напряжения, например компьютеры, телефоны и другая электроника.
Помните, что не все асинхронные генераторы имеют очень большие скачки напряжения на выходе, хороший проверенный бренд всегда будет устанавливать на свой генератор только самый надежный двигатель, который будет поддерживать постоянное число оборотов при скачках нагрузки, обеспечивая минимальные отклонения от нормы в работе генератора.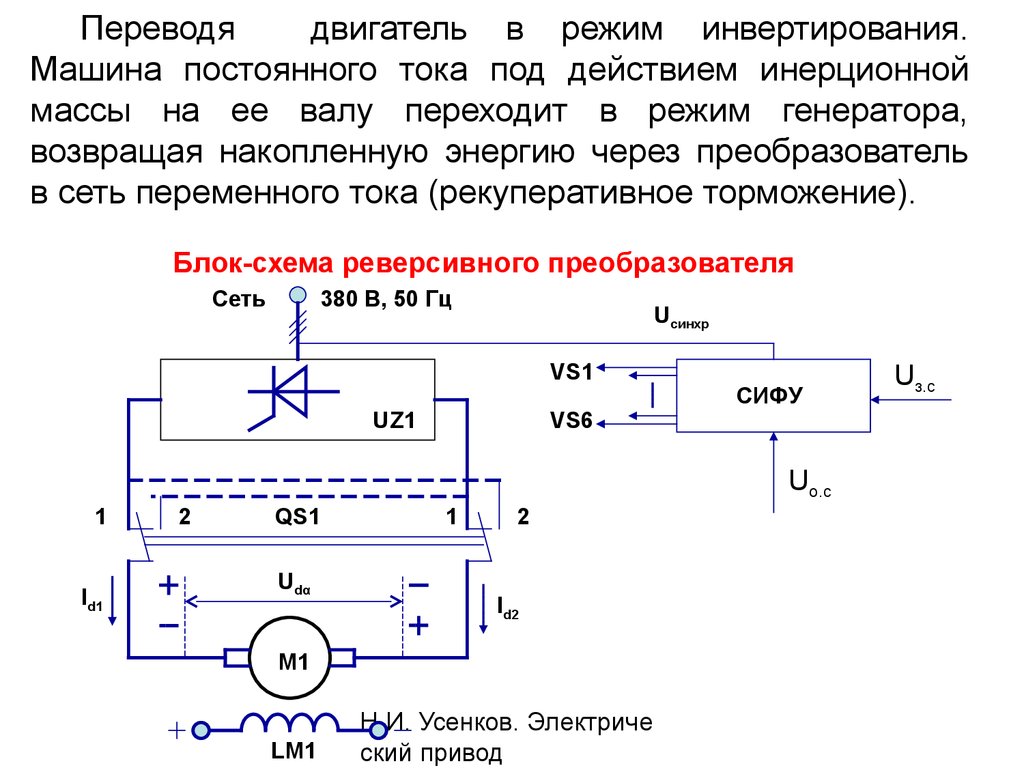
Подведение итогов, какой альтернатор выбрать: синхронный или асинхронный
При выборе между синхронным и асинхронным альтернатором стоит отталкиваться от того, в каких условиях будет применяться генератор и какие цели будут перед ним стоять и уже от этого отталкиваться при выборе.
Для того чтобы обеспечить свой дом или дачу стабильным электричеством, без перепадов и резких скачков, то стоит конечно же купить генератор синхронный, или щеточный, так как он будет давать на выходе ровное напряжение и качественный ток, что очень важно при подключении чувствительной аппретуры. Также такой генератор пригоден для работы с медицинским оборудованием, лабораторным или офисным оборудованием. Для всех этих целей старайтесь покупать модели с функцией AVR.
Если же главная цель генератора – это строительные работы на открытом воздухе, где большая загрязненность, пыль и влага, то стоит купить генератор с асинхронным альтернатором, который имеет большую устойчивость ко всем этим факторам. К тому же он пригоден для работы со сварочным оборудованием, так как исключен риск короткого замыкания при работе такого оборудования.
К тому же он пригоден для работы со сварочным оборудованием, так как исключен риск короткого замыкания при работе такого оборудования.
Так же у нас на сайте Вы сможете найти большой выбор Бензиновый генератор AGT или Бензиновый генератор Iron Angel
Поделиться
Поделится
Поделится
Статья супер!!!
Ответить
Спасибо всё понятно
Ответить
Класс! Всё стало понятно! Спасибо! Очень доходчиво.
Ответить
Спасибо за разъяснения.
Ответить
Новый комментарий
Войти с помощью
Отправить
18.
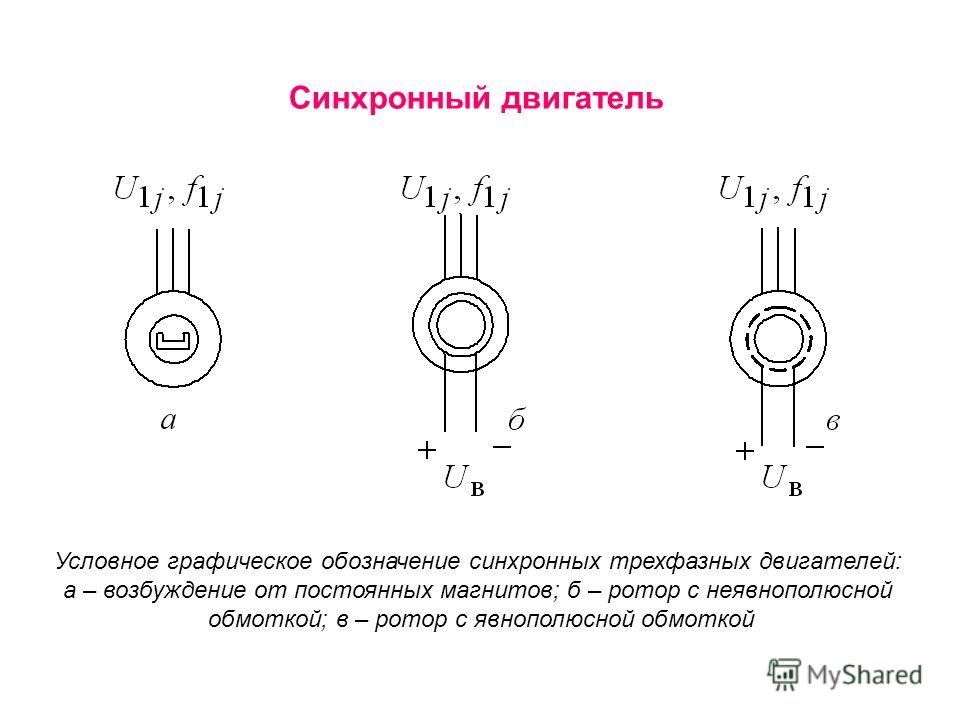 Сравнение ад и сд.
Сравнение ад и сд.Синхронные двигатели имеют более сложную конструкцию, чем асинхронные двигатели с короткозамкнутым ротором. Для них наряду с сетью переменного тока необходимо иметь источник постоянного тока. Пуск синхронных двигателей сложнее, чем асинхронных, т. е. требуются более сложные пусковые устройства. Вместе с тем синхронные двигатели могут работать с cos ф = 1 независимо от нагрузки двигателя. Они менее чувствительны к колебаниям напряжения сети, так как их максимальный момент прямо пропорционален напряжению сети, тогда как у асинхронных двигателей Ма пропорционален квадрату напряжения. Для синхронных двигателей характерно строгое постоянство частоты вращения независимо от нагрузки на валу.
Сопоставление достоинств и недостатков синхронных двигателей показывает, что их более вьп-одно применять, чем асинхронные двигатели, при больших мощностях (начиная с 100 кВт и выше).
Чтобы
остановить выбор на синхронном или
асинхронном двигателе для приведения
во вращение того или иного производственного
механизма, необходимо иметь в виду
следующее.
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные
двигатели дают возможность регулировать
частоту вращения различными способами,
рассмотренными в гл. 10. Использование
некоторых из этих способов для
регулирования частоты вращения синхронных
двигателей в принципе невозможно, а
некоторых связано с большими конструктивными
и эксплуатационными трудностями. Учитывая это, следует иметь в виду, что
синхронные двигатели относятся к
двигателям с нерегулируемой частотой
вращения.
Учитывая это, следует иметь в виду, что
синхронные двигатели относятся к
двигателям с нерегулируемой частотой
вращения.
Воздействуя на ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности. Можно, в частности, заставить синхронный двигатель работать с cos φ = 1, а также с опережающим током. Последнее может быть использовано для улучшения коэффициента мощности других потребителей, питающихся от той же сети. В отличие от этого асинхронный двигатель представлет собой активно-индуктивную нагрузку и имеет всегда cos φ < 1.
Из-за малых потерь мощности в роторе, а также в обмотке статора при работе с высоким cos φ КПД синхронных двигателей оказывается больше, а масса и габаритные размеры меньше, чем у асинхронных двигателей.
Учитывая
указанные достоинства синхронных
двигателей, стараются везде, где это
возможно, вместо асинхронных двигателей
применять синхронные. Они применяются
обычно в установках средней и большой
мощности при редких пусках, в случаях,
когда не требуется электрического
регулирования частоты вращения. Синхронные двигатели используются,
например, для привода насосов, компрессоров,
вентиляторов, генераторов постоянного
тока преобразовательных установок.
Синхронные двигатели используются,
например, для привода насосов, компрессоров,
вентиляторов, генераторов постоянного
тока преобразовательных установок.
13)
На рис. представлен характер зависимостей I =- f (if) при разных значениях Р = const.
Эти зависимости
по виду называются также U-образными
характеристиками. Минимальное
значение / для каждой кривой определяет
активную составляющую тока якоря Ia и величину мощности
для
которой построена данная кривая. Нижняя
кривая соответствует Р
= 0, причем if0 — значение тока возбуждения при Е
= U. Правые
части кривых соответствуют перевозбужденной
машине и отдаче в сеть индуктивного
тока и реактивной мощности, а левые
части — недовозбужденной машине, отдаче
в сеть емкостного тока и потреблению
реактивной мощности. Кривая φ = 0 или
cosφ
= 1 отклоняется при увеличении мощности
вправо, так как вследствие падения
напряжения возрастает значение е, и необходимый
ток возбуждения при cosφ
= 1. Кривая ОС на рис. в сущности является регулировочной
характеристикой машины при cosφ
= 1
Кривая φ = 0 или
cosφ
= 1 отклоняется при увеличении мощности
вправо, так как вследствие падения
напряжения возрастает значение е, и необходимый
ток возбуждения при cosφ
= 1. Кривая ОС на рис. в сущности является регулировочной
характеристикой машины при cosφ
= 1
Точка А на рис. соответствует холостому ходу невозбужденной машины. При этом из сети потребляется намагничивающий ток. Угол нагрузки θ возрастает при движении вдоль кривых рис. справа налево, так как, при меньших if и Е угол θ при Р = const увеличивается. Линия АВ представляет собой границу устойчивости, на которой θ = θкр. При дальнейшем уменьшении if машина выпадает из синхронизма. U-образные характеристики генератора и двигателя практически не отличаются друг от друга.
В чем разница между двигателем переменного тока и двигателем постоянного тока? – Magnetic Innovations
В чем разница между двигателем переменного тока и двигателем постоянного тока?
Существует широкий выбор электродвигателей, подходящих для многих промышленных применений и оборудования. Инженеры и конструкторы имеют большой выбор при выборе двигателя для своего применения. В таблице ниже представлен обзор наиболее распространенных типов электродвигателей. Глобальная классификация электродвигателей делится в основном на две разные ветви: двигатели переменного тока и двигатели постоянного тока. В этой статье основное внимание будет уделено четырем различным подгруппам: асинхронные двигатели переменного тока, синхронные коллекторные двигатели постоянного тока (с коммутатором), Бесщеточные двигатели постоянного тока и синхронные двигатели переменного тока с постоянными магнитами (PMSM).
Инженеры и конструкторы имеют большой выбор при выборе двигателя для своего применения. В таблице ниже представлен обзор наиболее распространенных типов электродвигателей. Глобальная классификация электродвигателей делится в основном на две разные ветви: двигатели переменного тока и двигатели постоянного тока. В этой статье основное внимание будет уделено четырем различным подгруппам: асинхронные двигатели переменного тока, синхронные коллекторные двигатели постоянного тока (с коммутатором), Бесщеточные двигатели постоянного тока и синхронные двигатели переменного тока с постоянными магнитами (PMSM).
Асинхронный двигатель переменного тока
Синхронные коллекторные двигатели постоянного тока
Бесщеточные двигатели постоянного тока
Синхронные двигатели с постоянными магнитами (PMSM)
1. Асинхронный двигатель переменного тока
Асинхронные двигатели широко используются в качестве промышленных приводов. Статор асинхронного двигателя состоит из намотанных полюсов, которые могут быть подключены непосредственно к сети или через частотно-регулируемый привод. Переменный ток через эти полюса будет индуцировать магнитное поле в воздушном зазоре и роторе. Поскольку для этого типа двигателя используется переменный ток, часто, когда люди ссылаются на термин «двигатель переменного тока», они на самом деле имеют в виду асинхронный двигатель. Магнитное поле будет индуцировать вихревые токи в роторе примерно так же, как это делает трансформатор. Эти индуцированные токи в роторе создают магнитное поле, которое генерирует крутящий момент.
Статор асинхронного двигателя состоит из намотанных полюсов, которые могут быть подключены непосредственно к сети или через частотно-регулируемый привод. Переменный ток через эти полюса будет индуцировать магнитное поле в воздушном зазоре и роторе. Поскольку для этого типа двигателя используется переменный ток, часто, когда люди ссылаются на термин «двигатель переменного тока», они на самом деле имеют в виду асинхронный двигатель. Магнитное поле будет индуцировать вихревые токи в роторе примерно так же, как это делает трансформатор. Эти индуцированные токи в роторе создают магнитное поле, которое генерирует крутящий момент.
Беличьи клетки
Большинство асинхронных двигателей имеют короткозамкнутые роторы, называемые короткозамкнутыми роторами. Это причина другого прозвища асинхронного двигателя: «двигатель с короткозамкнутым ротором». В асинхронных двигателях НЕ используются постоянные магниты, только медная проволока и многослойная сталь. Клетка ротора в основном состоит из алюминиевых стержней, но в последние 10 лет для повышения эффективности используются и медные стержни.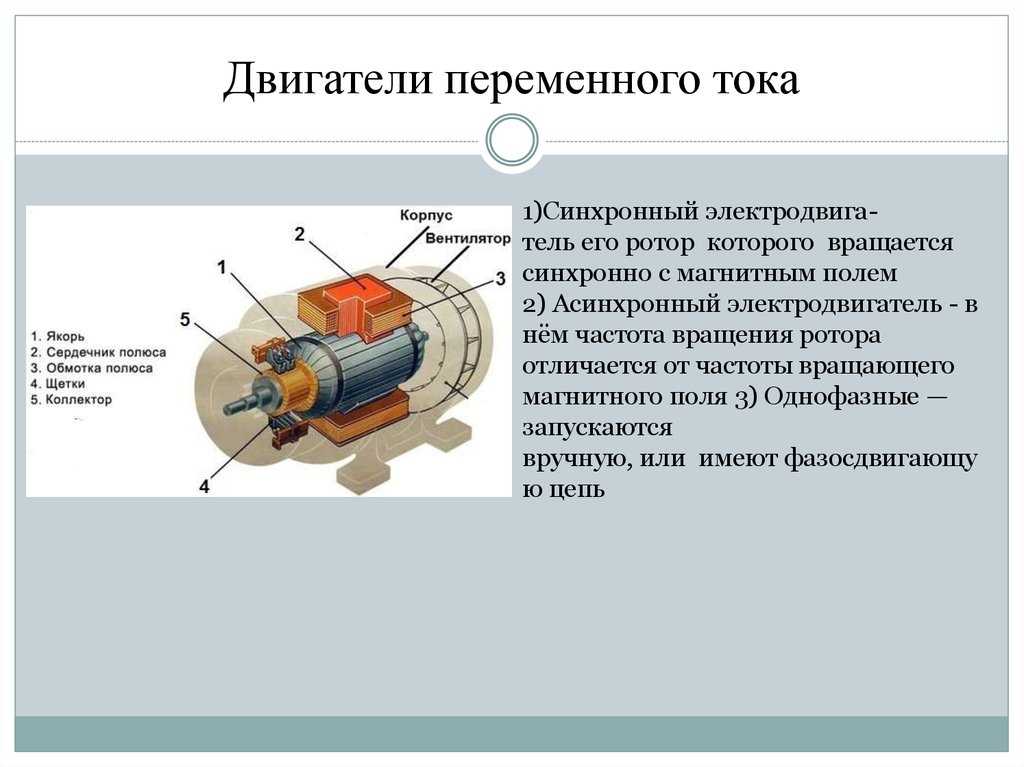
Однофазные и трехфазные модели
Доступны однофазные и трехфазные модели. Трехфазные двигатели в основном предназначены для больших нагрузок, в то время как меньшие нагрузки часто приводятся в действие однофазными асинхронными двигателями. При прямом подключении к сети двигатель разгоняется до определенной фиксированной скорости, которая немного медленнее, чем частота вращения приложенного электрического поля (это явление называется скольжением). Это свойство является причиной того, что асинхронные двигатели также иногда называют асинхронными двигателями. Достигаемая скорость зависит от количества пар полюсов и применяемой электрической частоты. Нагрузка на вал лишь незначительно снизит скорость двигателя (порядка нескольких процентов).
Изображение: ротор с короткозамкнутым ротором (источник)
Например: асинхронный двигатель с 2 парами полюсов, подключенный к сети 50 Гц, попытается развить скорость 1500 об/мин (=электрическая_частота*60 с/пар полюсов), но в зависимости от нагрузки он будет немного медленнее.

Эта постоянная скорость подходит для многих применений. Благодаря современной технологии электропривода теперь также можно достичь переменной скорости с помощью частотно-регулируемого привода (VFD). Поскольку изменяется электрическая частота (как упоминалось ранее), обороты вала в минуту также будут изменяться пропорционально. Внедрение частотно-регулируемого привода улучшило функциональность и энергоэффективность асинхронного двигателя.
Асинхронный двигатель переменного тока Преимущества и недостатки
Асинхронные двигатели имеют более низкий общий КПД и более низкую плотность крутящего момента по сравнению с двигателями с постоянными магнитами. Из-за отсутствия/отсутствия постоянных магнитов проще и проще применять ослабление поля, что обеспечивает большой диапазон оборотов для этих двигателей. Асинхронные двигатели широко распространены во многих промышленных и бытовых приложениях, где плотность крутящего момента и управляемость менее важны. Они самозапускающиеся, надежные и экономичные.
Они самозапускающиеся, надежные и экономичные.
2. Синхронные коллекторные двигатели постоянного тока (с коммутатором)
Как следует из названия, коллекторные электродвигатели постоянного тока питаются от постоянного тока (DC). Двигатели имеют механическую коммутацию. В щеточных двигателях постоянного тока используются постоянные магниты или полюса статора с обмоткой. Полюса постоянного магнита или обмотки статора создают основное стационарное магнитное поле двигателя.
Ротор Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока имеют роторы с обмоткой, которые через коммутатор со щетками подключаются к источнику напряжения или тока. Когда полюса ротора пропускают ток, создается магнитное поле. Это поле ротора попытается выровняться с полем статора и, следовательно, создать крутящий момент. Характер тока в отдельных катушках ротора будет определяться коммутатором и щетками (рисунок).
Статор Коллекторные двигатели постоянного тока
Статоры щеточных двигателей постоянного тока изготавливаются с полюсами с обмоткой или с постоянными магнитами. На обмотки полюсов статора должно подаваться определенное напряжение/ток. Это создает дополнительную функцию управления и обеспечивает двигатель с определенными характеристиками момента/скорости. Типичными конфигурациями являются последовательная, шунтирующая и составная.
На обмотки полюсов статора должно подаваться определенное напряжение/ток. Это создает дополнительную функцию управления и обеспечивает двигатель с определенными характеристиками момента/скорости. Типичными конфигурациями являются последовательная, шунтирующая и составная.
Коллекторный двигатель постоянного тока. Изображение предоставлено: ZGC Motor
Коллектор Коллекторные двигатели постоянного тока
Коммутатор действует как механический переключатель, поскольку он вызывает протекание тока через чередующиеся полюса ротора в зависимости от положения ротора. Это приводит к постоянному крутящему моменту на оборот. Щетки постоянно скользят по коллектору, что приводит к их износу. Это негативно влияет на срок службы и последовательность технического обслуживания коллекторного двигателя постоянного тока и является основным недостатком этого типа двигателя. Благодаря внедрению более сложной электроники (например, частотно-регулируемого привода) механическая коммутация поля ротора со щетками была преобразована в принцип электронной коммутации (т. е. бесщеточный постоянный ток).
е. бесщеточный постоянный ток).
Управляемость щеточных двигателей постоянного тока
В первые дни, когда электроника широко не использовалась, эти типы двигателей часто использовались для различных целей. Простой управляемый источник постоянного напряжения может управлять двигателем. Более поздние опции, такие как управление током, системы обратной связи и ШИМ-приводы, облегчили еще более высокую управляемость коллекторных двигателей постоянного тока. Использование постоянных магнитов обеспечивает относительно высокую плотность крутящего момента и хороший КПД для двигателей этого типа.
Преимущества и недостатки Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока имеют хорошие характеристики при запуске и регулировании скорости. Он имеет относительно высокую плотность крутящего момента. Диапазон регулирования скорости широкий, работает плавно. Электромагнитные помехи малы, а способность к перегрузке велика.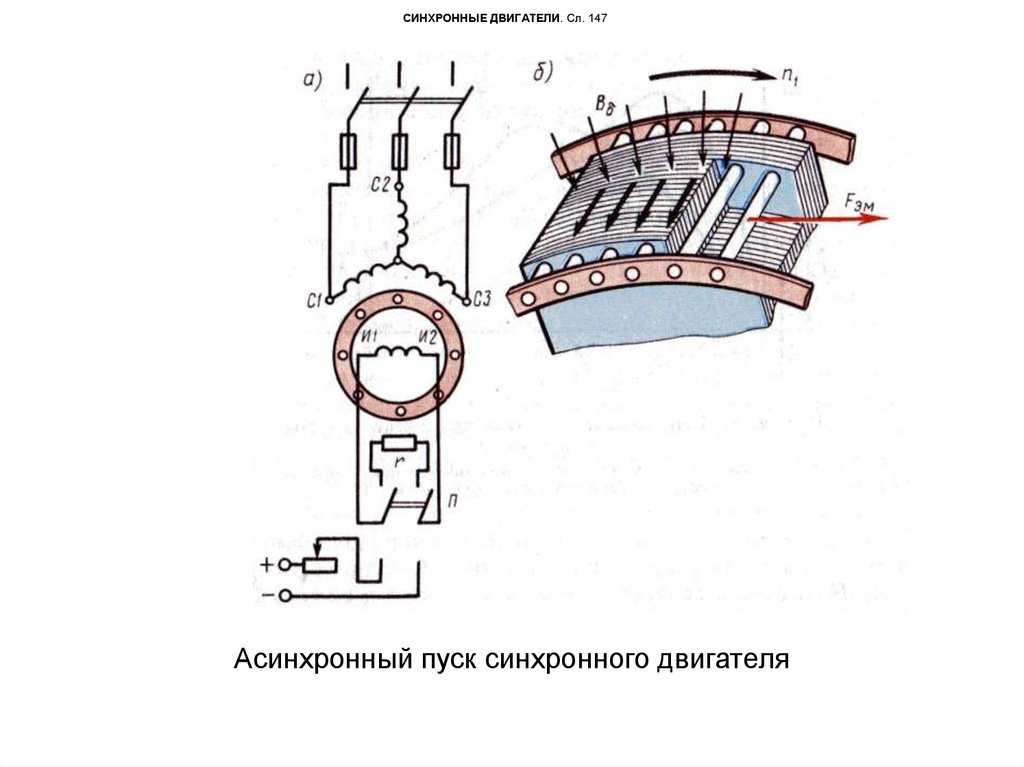 Но конструкция щеточных двигателей постоянного тока является недостатком. Скользящий контакт между коллектором и щеткой вызывает искрение и механический износ. Из-за этого коллекторные двигатели постоянного тока имеют относительно короткий срок службы, проблемы с надежностью и высокие затраты на техническое обслуживание.
Но конструкция щеточных двигателей постоянного тока является недостатком. Скользящий контакт между коллектором и щеткой вызывает искрение и механический износ. Из-за этого коллекторные двигатели постоянного тока имеют относительно короткий срок службы, проблемы с надежностью и высокие затраты на техническое обслуживание.
3. Бесщеточные двигатели постоянного тока (BLDC)
Как видно из названия, в бесщеточных двигателях постоянного тока щетки не используются. По сравнению с щеточными двигателями постоянного тока, в бесщеточных двигателях постоянного тока используется совершенно другой метод коммутации. Вместо щеток коммутация осуществляется электронным способом. Конструкция большинства бесколлекторных двигателей постоянного тока основана на статоре с витыми полюсами и многополюсном роторе с постоянными магнитами. Многополюсный ротор с постоянными магнитами проходит мимо статора с намотанными полюсами. Постоянные магниты ротора реагируют на изменяющееся магнитное поле статора. Статор неподвижен, подвижных проводов нет. Поэтому нет необходимости в токосъемных кольцах, коллекторах или щетках для бесщеточного двигателя постоянного тока.
Статор неподвижен, подвижных проводов нет. Поэтому нет необходимости в токосъемных кольцах, коллекторах или щетках для бесщеточного двигателя постоянного тока.
Полюса статора – трехфазная система
Большую часть времени полюса статора наматываются в трехфазной конфигурации. Трехфазная система обмоток статора подключена к цепи электронных ключей (транзисторов, полевых транзисторов и т. д.). Схема включения питается постоянным напряжением или источником выпрямленного переменного напряжения. Простое переключение фаз вызывает токи прямоугольной формы/трапеции, поэтому обратная ЭДС бесщеточного двигателя постоянного тока также более или менее имеет форму прямоугольной волны/трапеции. Это вызывает увеличение пульсаций крутящего момента при работе этих двигателей. Более высокая скорость может быть достигнута за счет фазового продвижения. С использованием технологии VFD с бесщеточным двигателем стало возможным генерировать синусоидальный ток.
Датчик
Для включения правильной фазы в нужный момент необходима система обратной связи.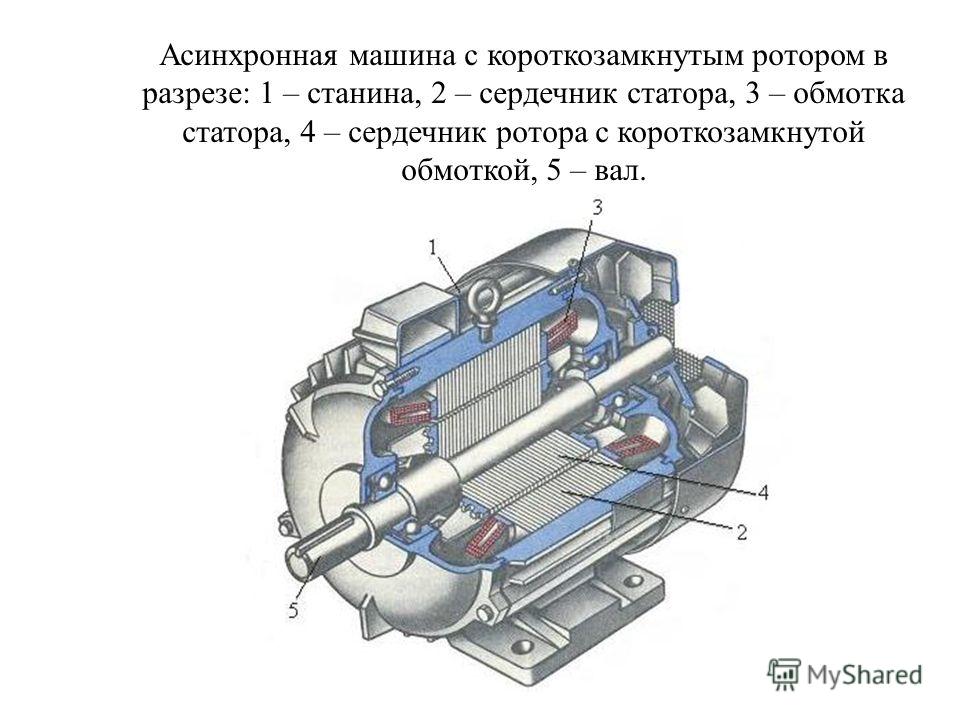 Датчики Холла могут быть установлены для определения положения ротора с постоянными магнитами относительно статора. Хотя чаще всего используются датчики Холла, существуют и более точные системы датчиков положения. С помощью вышеуказанной системы вращение двигателя может поддерживаться синхронно с приложенной электрической частотой.
Датчики Холла могут быть установлены для определения положения ротора с постоянными магнитами относительно статора. Хотя чаще всего используются датчики Холла, существуют и более точные системы датчиков положения. С помощью вышеуказанной системы вращение двигателя может поддерживаться синхронно с приложенной электрической частотой.
Преимущества и недостатки Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока имеют много преимуществ по сравнению с щеточными двигателями постоянного тока, например, низкие затраты на техническое обслуживание, меньший уровень шума при работе, лучшие характеристики и более высокий КПД, меньшая электромагнитная совместимость. Они доступны в более компактных размерах и обеспечивают высокое соотношение крутящего момента к весу. Но по сравнению с другими двигателями бесщеточные двигатели постоянного тока также имеют несколько недостатков. Стоимость двигателя и электронного контроллера сравнительно выше. Пульсации крутящего момента, как упоминалось ранее. Кроме того, они немного сложнее.
Кроме того, они немного сложнее.
Изображение предоставлено: Microchip Technology Inc.
4. Двигатели переменного тока с постоянной синхронной синусоидой (PMSM)
Такие термины, как двигатель переменного тока PMSM, бесщеточный двигатель переменного тока или двигатель EC (электрическая коммутация), также часто используются для этого типа двигателя. Принцип работы этого двигателя заключается в статорной части, которая содержит трехфазную систему обмотки и конструкцию ротора с многополюсным массивом постоянных магнитов. Эти двигатели с высокой удельной мощностью очень эффективны и соответствуют классам энергоэффективности IE4 и даже IE5. Существуют различные конструкции синхронного синусоидального двигателя переменного тока с постоянными магнитами, например, с внутренними направляющими, внешними направляющими, двигателем с осевым потоком, поперечным двигателем и т. д.
Синусоидальный ток
Благодаря магнитной конструкции обратная ЭДС является синусоидальной, в сочетании с синусоидальным током может быть создан плавный крутящий момент. Для получения синусоидального тока необходим относительно сложный привод, такой как усилитель мощности или частотно-регулируемый привод. Эти типы дисков становятся все более и более стандартными и более простыми в использовании. Двигатель переменного тока с постоянным магнитом также работает синхронно с приложенной электрической частотой (деленной на количество пар полюсов).
Для получения синусоидального тока необходим относительно сложный привод, такой как усилитель мощности или частотно-регулируемый привод. Эти типы дисков становятся все более и более стандартными и более простыми в использовании. Двигатель переменного тока с постоянным магнитом также работает синхронно с приложенной электрической частотой (деленной на количество пар полюсов).
Потери в железе
Использование сильных постоянных магнитов приводит к постоянным потерям в железе в пакете пластин во время вращения. Эти потери в железе ограничивают максимальную скорость двигателя, как и более высокое напряжение, необходимое для более высокой скорости (в основном ограниченное приложенным напряжением 400 В переменного тока_среднеквадратичное значение). Эти параметры необходимо учитывать. Для всех вышеперечисленных типов двигателей подаваемый ток вызывает потери на рассеяние в катушках. Эти потери должны быть термически обработаны в конструкции. Это также требует хорошей тепловой конструкции, потому что чем лучше тепловая конструкция, тем выше плотность крутящего момента.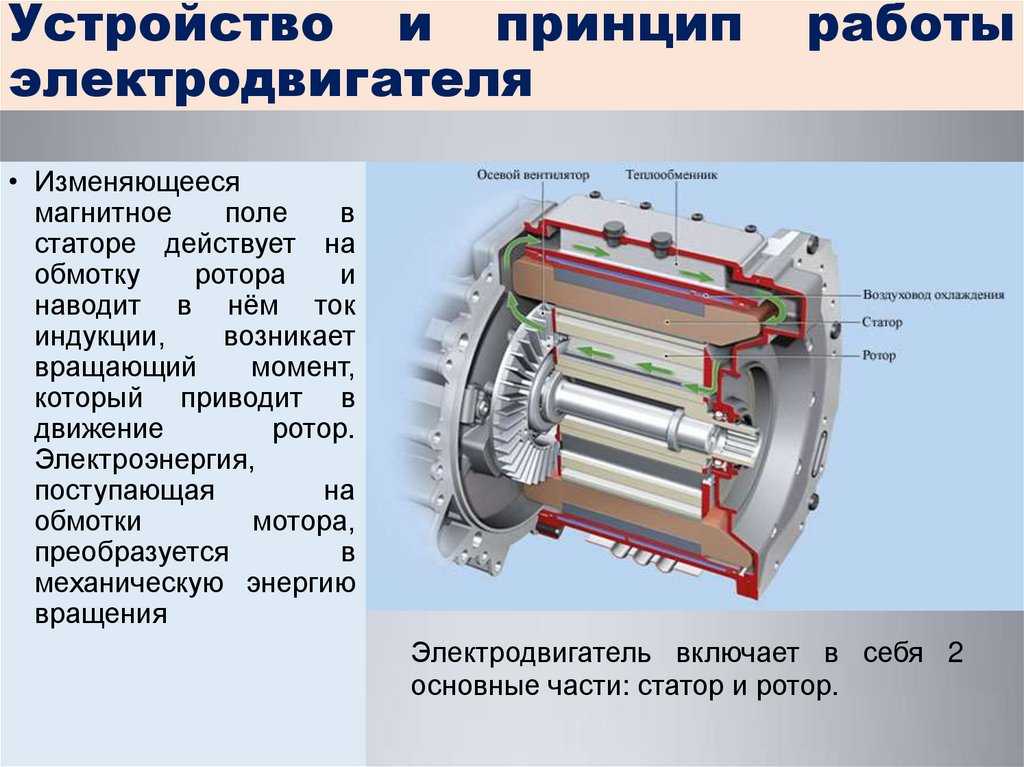 Поскольку большая мощность может подаваться и рассеиваться без перегрева двигателя.
Поскольку большая мощность может подаваться и рассеиваться без перегрева двигателя.
Магниты ротора для поверхностного и внутреннего монтажа (источник)
Высокая плотность крутящего момента
Сочетание высокопрочных постоянных магнитов с превосходной магнитной конструкцией позволяет получить двигатель PMSM с очень высокой плотностью крутящего момента. Например, двигатель переменного тока с постоянным магнитным полем массой 20 кг (44 фунта), включая корпус и подшипник, может обеспечить сравнимую выходную мощность/крутящий момент по сравнению с асинхронным двигателем переменного тока массой 55 кг (121 фунт). На основе стандартных/пассивных методов охлаждения для обоих. Для двигателей переменного тока с постоянными магнитами требуется непрерывная обратная связь по положению либо с помощью датчиков, либо сегодня возможно даже бездатчиковое управление. Для увеличения скоростных возможностей некоторые конструкции двигателей переменного тока с СДПМ имеют возможность ослабления поля.
Рост использования Электродвигатели переменного тока с постоянными магнитами
Технология двигателей переменного тока с постоянными магнитами в сочетании с электроприводами, обеспечивающими электронную коммутацию, доступна уже некоторое время. Но по мере того, как приводы двигателей, поддерживающие двигатели PMSM, становятся все более доступными, все больше компаний начинают интегрировать двигатели переменного тока с постоянными магнитами в свои приложения. Использование значительно увеличивается. Это связано с компактной конструкцией, высокой плотностью крутящего момента, высокой эффективностью и длительным ожидаемым сроком службы. Двигатель переменного тока PMSM дает компаниям возможность создавать приложения меньшего размера, работающие более эффективно, с большей управляемостью, с повышенной надежностью и, как таковые, с более низкими (эксплуатационными) затратами.
Преимущества и недостатки двигателей переменного тока с постоянными магнитами
Хотя для двигателей переменного тока с постоянными магнитами всегда требуется привод, и они, как правило, немного дороже по сравнению с асинхронными двигателями переменного тока, они часто являются лучшей альтернативой. Они имеют более высокую плотность крутящего момента, намного более эффективны, значительно меньше и легче, чем сопоставимые асинхронные двигатели.
Они имеют более высокую плотность крутящего момента, намного более эффективны, значительно меньше и легче, чем сопоставимые асинхронные двигатели.
Узнайте больше о различных двигателях
Существует широкий выбор двигателей, подходящих для многих промышленных применений и оборудования. У инженеров и конструкторов есть большой выбор при выборе двигателя для их применения. Подробнее о других моторах вы можете прочитать на нашем сайте:
Свяжитесь с нами для получения дополнительной информации
Серия стандартных двигателей с прямым приводом компании Magnetic Innovations
Разница между асинхронным двигателем и синхронным двигателем
Опубликовано: 25 февраля 2022 г.
Автор: Tigerwong Parking
Просмотров: 51
Синхронный двигатель, как и асинхронный двигатель (то есть асинхронный двигатель), представляет собой обычный двигатель переменного тока. Синхронный двигатель является сердцем энергосистемы. Это элемент, который объединяет вращение и статику, электромагнитное изменение и механическое движение для реализации преобразования электрической энергии и механической энергии. Его динамические характеристики очень сложны, и его динамические характеристики оказывают большое влияние на динамические характеристики всей энергосистемы. Характеристики синхронного двигателя: во время установившейся работы существует постоянная связь между скоростью вращения ротора и частотой сети, n = ns = 60F / P, где f — частота сети, P — полюсный логарифм двигателя, а NS называется синхронной скоростью. Если частота электросети остается неизменной, скорость синхронного двигателя в установившемся режиме постоянна независимо от размера нагрузки. Асинхронный двигатель, также известный как асинхронный двигатель, представляет собой двигатель переменного тока, который создает электромагнитный крутящий момент за счет взаимодействия. между вращающимся магнитным полем воздушного зазора и индуцированным током обмотки ротора, чтобы реализовать преобразование электромеханической энергии в механическую энергию.
Это элемент, который объединяет вращение и статику, электромагнитное изменение и механическое движение для реализации преобразования электрической энергии и механической энергии. Его динамические характеристики очень сложны, и его динамические характеристики оказывают большое влияние на динамические характеристики всей энергосистемы. Характеристики синхронного двигателя: во время установившейся работы существует постоянная связь между скоростью вращения ротора и частотой сети, n = ns = 60F / P, где f — частота сети, P — полюсный логарифм двигателя, а NS называется синхронной скоростью. Если частота электросети остается неизменной, скорость синхронного двигателя в установившемся режиме постоянна независимо от размера нагрузки. Асинхронный двигатель, также известный как асинхронный двигатель, представляет собой двигатель переменного тока, который создает электромагнитный крутящий момент за счет взаимодействия. между вращающимся магнитным полем воздушного зазора и индуцированным током обмотки ротора, чтобы реализовать преобразование электромеханической энергии в механическую энергию. По конструкции ротора асинхронные двигатели делятся на две формы: Squirrel Cage (асинхронный двигатель с короткозамкнутым ротором) и асинхронный двигатель с обмоткой.
По конструкции ротора асинхронные двигатели делятся на две формы: Squirrel Cage (асинхронный двигатель с короткозамкнутым ротором) и асинхронный двигатель с обмоткой.
1. Конструктивные различия между синхронным двигателем и асинхронным двигателем Самая большая разница между синхронным двигателем и асинхронным двигателем заключается в том, соответствует ли скорость их ротора вращающемуся магнитному полю статора. Скорость ротора двигателя такая же, как и вращающееся магнитное поле статора, которое называется синхронным двигателем, напротив, оно называется асинхронным двигателем. Кроме того, обмотки статора синхронного двигателя и асинхронного двигателя одинаковы, а Разница заключается в конструкции ротора двигателя. Ротор асинхронного двигателя представляет собой короткозамкнутую обмотку, которая генерирует ток за счет электромагнитной индукции. Структура ротора синхронного двигателя относительно сложна, с обмоткой возбуждения постоянного тока, поэтому для подачи тока через контактное кольцо требуется внешний источник питания возбуждения; Следовательно, структура синхронного двигателя относительно сложна, а стоимость и стоимость обслуживания также относительно высоки.
2. Разница реактивной мощности между синхронным двигателем и асинхронным двигателем. По сравнению с асинхронным двигателем может потреблять только реактивную мощность, синхронный двигатель может излучать реактивную мощность и поглощать реактивную мощность!3. Различия между синхронным двигателем и асинхронным двигателем в функции и назначении
Скорость синхронного двигателя синхронизирована с электромагнитной скоростью, а скорость асинхронного двигателя ниже электромагнитной скорости. Скорость синхронного двигателя не изменится до тех пор, пока он не потеряет шаг независимо от нагрузки. Скорость асинхронного двигателя всегда изменяется при изменении нагрузки. Синхронный двигатель отличается высокой точностью, но сложностью изготовления, высокой стоимостью и относительно сложным обслуживанием. Хотя асинхронный двигатель имеет медленный отклик, он прост в установке и использовании и дешев. Поэтому синхронный двигатель не так широко используется, как асинхронный двигатель. Синхронные двигатели в основном используются в больших генераторах, а асинхронные двигатели почти используются в двигателях.
Синхронные двигатели в основном используются в больших генераторах, а асинхронные двигатели почти используются в двигателях.
Турникетные ворота Вопросы и ответы:
Что такое контроль доступа к турникету?
Разработанный для бесперебойной работы при входе и выходе людей из здания, контроль доступа через турникет должен быть ненавязчивым и эффективным. Хотя турникеты и барьеры существуют для защиты от посторонних лиц, они также должны быть максимально практичными для тех, кто имеет право доступа. Мы собрали основы систем контроля доступа через турникеты, чтобы послужить введением в эту технологию физической безопасности.
Турникеты контроля доступа автоматически регулируют вход в указанное здание или зону, обычно по очереди. Большинству турникетных ворот для работы требуется лишь небольшая мощность, поэтому их можно установить с безопасным рабочим напряжением. Беспилотные турникетные системы могут быть запрограммированы таким образом, чтобы разрешать доступ только тем, у кого есть определенная информация о безопасности или учетные данные, без необходимости вмешательства человека.
Для чего используются турникеты? Турникетные ворота, являясь аппаратным барьером, который разрешает или запрещает доступ в пространство, контролируют не только тех, кто может пройти через них, но и сколько человек одновременно. В зависимости от места установки турникеты контроля доступа разных типов и размеров могут использоваться для пропуска пешеходов или транспортных средств.
Турникетные системы могут быть удивительно универсальными. Переключение режимов работы турникетов может менять их функцию с разрешающего однократного прохода в одном направлении на однократный проход в обоих направлениях, с заблокированного в обоих направлениях на свободный проход в одном или обоих направлениях. Режим доступа в камеру шлюза может добавить к турникету уровень видео- или биометрической проверки для дополнительной безопасности.
Какие типы турникетов существуют? По мере того, как автоматизированные технологии со временем становились все более продвинутыми, то же самое происходило и с системами входа через турникеты.
Существует не только ряд типов турникетов, соответствующих различным помещениям и требованиям контроля доступа, турникеты могут быть интегрированы с периферийными или более широкими системами безопасности для дополнительной проверки разрешения на вход.Пешеходные турникеты высотой до пояса: один из наиболее распространенных типов турникетов для контроля доступа, пешеходные ворота высотой до пояса могут иметь форму вращающегося штатива, подъемного рычага, скользящего или вращающегося барьера, чтобы обеспечить проход только одного человека одновременно. После предоставления доступа некоторые типы турникетов высотой по пояс требуют, чтобы проходящий человек оттолкнул барьер (например, барьеры-треноги), в то время как другие автоматически открываются, чтобы разрешить вход. Полноростовые пешеходные турникеты: Обеспечивая более высокий уровень физической безопасности, полноростовые турникеты гораздо труднее пройти без зазора.
Традиционные вращающиеся двери предлагают форму контроля доступа, просто ограничивая количество людей, которые могут войти и выйти, стеклянная защита или порталы «воздушного шлюза» закрываются с одной стороны, прежде чем открываться с другой.
Оптические пешеходные турникеты: способные регулировать доступ без какого-либо физического барьера, оптические турникеты работают, отслеживая людей, которые проходят через удостоверения личности или бейджи, используя лучи инфракрасного света. Если оптический турникет обнаруживает несанкционированный вход, система поднимает тревогу или сигнал.Турникеты контроля доступа для транспортных средств: Барьеры с подъемной стрелой контролируют доступ для транспортных средств при въезде и выезде с автостоянок, платных дорог и мостов. Рукава могут быть оснащены цепными или лестничными барьерными юбками, которые не позволяют пешеходам нырять под автомобильные турникеты. Биометрические: биометрические турникеты допускают вход на основе определенных и уникальных характеристик, таких как снятие отпечатков пальцев, распознавание радужной оболочки глаза и голосовое управление.
Штрих-код / магнитная полоса: со считывателями штрих-кода или магнитной полосы этот тип турникетов требует, чтобы пользователи предъявляли и сканировали удостоверение личности или бейдж.
Бесконтактные считыватели: бесконтактные считыватели работают аналогично считывателям штрих-кодов и магнитных полос, но могут считывать удостоверение личности или бейдж, когда он находится поблизости, без необходимости пользователю вставлять или проводить его. Где используются турникеты?Системы контроля доступа можно использовать в любом месте, где необходимо регулировать движение пешеходов или транспортных средств. Охрана здания – это только одна из причин для установки турникетных ворот; есть несколько других преимуществ и вариантов использования этого типа контроля доступа. Например, офисные и коммерческие организации могут использовать турникетные ворота для контроля доступа посетителей или, если они интегрированы с автоматизированной системой учета рабочего времени, для управления рабочим временем и временем нахождения сотрудников.
Объекты досуга и развлечений могут иметь иную компетенцию контроля доступа через турникет; в большинстве случаев для регулирования количества людей, которые могут одновременно перемещаться из одной области в другую.
В помещениях с высоким уровнем безопасности, таких как аэропорты, встроенные турникетные ворота могут выступать в качестве дополнительной меры безопасности, а также средства разделения пассажиров. Позвольте турникетным системам доступа вернуть вашему бизнесу контроль В рамках комплексной системы контроля доступа турникеты предлагают простой, но эффективный способ повысить безопасность и управлять потоком людей.Чтобы узнать больше о наших системах турникетных ворот и о том, какую пользу они могут принести вашей организации, свяжитесь с нами. Линден присоединился к Touchstar ATC (формально Feedback Data) в должности продавца для контроля доступа в 2010 году. До прихода в компанию Линден занимал должности менеджера по производству и работе с клиентами, приобретая обширный технический и коммерческий опыт на рынке электроники.
В 2013 году Линден был назначен директором по продажам, а в 2017 году он взял на себя общую ответственность за бизнес в качестве управляющего директора.
Помимо управления Touchstar ATC, Линден по-прежнему активно занимается продажами и управлением ключевыми клиентами. Когда Линден не участвует в бизнесе, он является страстным энтузиастом автомобилей с высокими характеристиками.

 Существует не только ряд типов турникетов, соответствующих различным помещениям и требованиям контроля доступа, турникеты могут быть интегрированы с периферийными или более широкими системами безопасности для дополнительной проверки разрешения на вход.
Существует не только ряд типов турникетов, соответствующих различным помещениям и требованиям контроля доступа, турникеты могут быть интегрированы с периферийными или более широкими системами безопасности для дополнительной проверки разрешения на вход. Оптические пешеходные турникеты: способные регулировать доступ без какого-либо физического барьера, оптические турникеты работают, отслеживая людей, которые проходят через удостоверения личности или бейджи, используя лучи инфракрасного света. Если оптический турникет обнаруживает несанкционированный вход, система поднимает тревогу или сигнал.
Оптические пешеходные турникеты: способные регулировать доступ без какого-либо физического барьера, оптические турникеты работают, отслеживая людей, которые проходят через удостоверения личности или бейджи, используя лучи инфракрасного света. Если оптический турникет обнаруживает несанкционированный вход, система поднимает тревогу или сигнал. Бесконтактные считыватели: бесконтактные считыватели работают аналогично считывателям штрих-кодов и магнитных полос, но могут считывать удостоверение личности или бейдж, когда он находится поблизости, без необходимости пользователю вставлять или проводить его. Где используются турникеты?
Бесконтактные считыватели: бесконтактные считыватели работают аналогично считывателям штрих-кодов и магнитных полос, но могут считывать удостоверение личности или бейдж, когда он находится поблизости, без необходимости пользователю вставлять или проводить его. Где используются турникеты? В помещениях с высоким уровнем безопасности, таких как аэропорты, встроенные турникетные ворота могут выступать в качестве дополнительной меры безопасности, а также средства разделения пассажиров. Позвольте турникетным системам доступа вернуть вашему бизнесу контроль В рамках комплексной системы контроля доступа турникеты предлагают простой, но эффективный способ повысить безопасность и управлять потоком людей.
В помещениях с высоким уровнем безопасности, таких как аэропорты, встроенные турникетные ворота могут выступать в качестве дополнительной меры безопасности, а также средства разделения пассажиров. Позвольте турникетным системам доступа вернуть вашему бизнесу контроль В рамках комплексной системы контроля доступа турникеты предлагают простой, но эффективный способ повысить безопасность и управлять потоком людей. Помимо управления Touchstar ATC, Линден по-прежнему активно занимается продажами и управлением ключевыми клиентами. Когда Линден не участвует в бизнесе, он является страстным энтузиастом автомобилей с высокими характеристиками.
Помимо управления Touchstar ATC, Линден по-прежнему активно занимается продажами и управлением ключевыми клиентами. Когда Линден не участвует в бизнесе, он является страстным энтузиастом автомобилей с высокими характеристиками.Что такое поворотный турникет?
Распашные турникеты представляют собой турникетные ворота, которые открываются наружу, позволяя людям пройти в коридор. Распашные турникеты отличаются от обычных металлических ворот формой ворот. В распашных воротах турникета не используется традиционная петля для соединения ворот с рамой, а вместо этого используются металлические детали, которые подходят к обеим сторонам двери. Этот тип ворот является менее дорогой и простой в установке альтернативой карусельной двери. Распашные турникеты, также известные как ворота-турникеты, представляют собой автоматические турникеты на остановках общественного транспорта, в торговых центрах, музеях или развлекательных заведениях.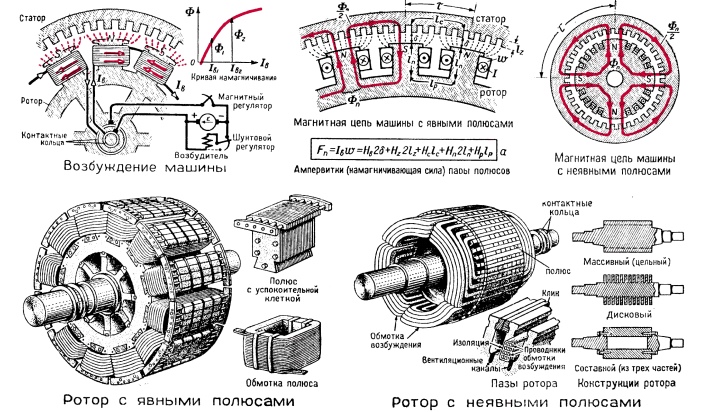 парк, где инспектор из отдела безопасности должен пропустить пассажира, оплатившего проезд и имеющего соответствующий билет, в зону, но они не могут пройти, пока не пройдут через турникет. Структура распашных ворот турникета очень похожа на болт используется для ремонта ворот. Он состоит из различных компонентов, которые обычно свариваются между собой. Различные компоненты включают ползунки и ручку. В этом посте я расскажу о различных компонентах и принципах их работы. Технология «поворотного турникета» в основном работает так же, как и классический турникет. Это не позволит человеку пройти через «входные» ворота без билета. Он пропустит его к «выходу», только если у него есть билет. Если у него нет билета, ворота не откроются. Звучит неплохо, пока человек, у которого нет билета, не окажется случайным человеком. Вы можете превратить свой офис в личный кабинет с помощью распашных турникетных ворот. Это новое нововведение в области безопасности позволит вам открыть свой офис в удобное для вас время.
парк, где инспектор из отдела безопасности должен пропустить пассажира, оплатившего проезд и имеющего соответствующий билет, в зону, но они не могут пройти, пока не пройдут через турникет. Структура распашных ворот турникета очень похожа на болт используется для ремонта ворот. Он состоит из различных компонентов, которые обычно свариваются между собой. Различные компоненты включают ползунки и ручку. В этом посте я расскажу о различных компонентах и принципах их работы. Технология «поворотного турникета» в основном работает так же, как и классический турникет. Это не позволит человеку пройти через «входные» ворота без билета. Он пропустит его к «выходу», только если у него есть билет. Если у него нет билета, ворота не откроются. Звучит неплохо, пока человек, у которого нет билета, не окажется случайным человеком. Вы можете превратить свой офис в личный кабинет с помощью распашных турникетных ворот. Это новое нововведение в области безопасности позволит вам открыть свой офис в удобное для вас время. Это идеальное решение для ухода за офисом, при этом обеспечивая доступ ваших коллег в офис. Единственным недостатком является то, что требуется некоторое время для прибытия охраны. Использование этих шлагбаумов экономит время на ожидание закрытия ворот автоматической системой. В распашных турникетных воротах используются датчики, которые определяют, движутся ли колеса автомобиля. Они откроют или закроют ворота в зависимости от того, обнаруживают ли датчики препятствие или движутся колеса. Не перепрыгивайте через ворота! Подходя к турникету, важно обратить внимание на группу людей, чтобы увидеть, не стоит ли турникет на пути. Если есть, вам нужно будет нажать большую зеленую кнопку в верхней части турникета, а затем нажать среднюю красную кнопку, чтобы пройти. Затем вам нужно будет удерживать зеленую кнопку в течение секунды, после чего вы сможете пройти. Если вам нужно повернуть много ворот, вам нужно создать таймер времени, который будет использоваться при их повороте. Вы можете получить простой гаджет, который может сделать это за вас.
Это идеальное решение для ухода за офисом, при этом обеспечивая доступ ваших коллег в офис. Единственным недостатком является то, что требуется некоторое время для прибытия охраны. Использование этих шлагбаумов экономит время на ожидание закрытия ворот автоматической системой. В распашных турникетных воротах используются датчики, которые определяют, движутся ли колеса автомобиля. Они откроют или закроют ворота в зависимости от того, обнаруживают ли датчики препятствие или движутся колеса. Не перепрыгивайте через ворота! Подходя к турникету, важно обратить внимание на группу людей, чтобы увидеть, не стоит ли турникет на пути. Если есть, вам нужно будет нажать большую зеленую кнопку в верхней части турникета, а затем нажать среднюю красную кнопку, чтобы пройти. Затем вам нужно будет удерживать зеленую кнопку в течение секунды, после чего вы сможете пройти. Если вам нужно повернуть много ворот, вам нужно создать таймер времени, который будет использоваться при их повороте. Вы можете получить простой гаджет, который может сделать это за вас. Он будет записывать время, и у вас будет цифровой таймер на приборной панели. Вы по-прежнему можете использовать свой обычный GPS, чтобы узнать время, но будет намного удобнее иметь таймер на приборной панели. платформу к другой. Существуют также хорошо известные стеклянные/железные распашные ворота, которые используются для безопасной выдачи багажа в аэропортах. конец (как и ваш клиентский портал), у вас есть идеальный шторм проблем с удобством использования. Ваши пользователи должны беспокоиться о том, чтобы вернуться назад, чтобы получить данные, и они должны беспокоиться о вводе данных. Как упоминалось ранее, очень легко перемещать замок вверх и вниз. Если у вас есть лишнее время, вы можете попробовать установить текстовый расширитель на поворотный турникет, чтобы облегчить себе работу. Вы также можете попробовать заменить свой обычный замок на этот, чтобы увидеть, насколько отличается опыт. На многих вокзалах есть распашные турникетные ворота. Это приспособление помогает ограничить количество людей, одновременно проходящих через ворота.
Он будет записывать время, и у вас будет цифровой таймер на приборной панели. Вы по-прежнему можете использовать свой обычный GPS, чтобы узнать время, но будет намного удобнее иметь таймер на приборной панели. платформу к другой. Существуют также хорошо известные стеклянные/железные распашные ворота, которые используются для безопасной выдачи багажа в аэропортах. конец (как и ваш клиентский портал), у вас есть идеальный шторм проблем с удобством использования. Ваши пользователи должны беспокоиться о том, чтобы вернуться назад, чтобы получить данные, и они должны беспокоиться о вводе данных. Как упоминалось ранее, очень легко перемещать замок вверх и вниз. Если у вас есть лишнее время, вы можете попробовать установить текстовый расширитель на поворотный турникет, чтобы облегчить себе работу. Вы также можете попробовать заменить свой обычный замок на этот, чтобы увидеть, насколько отличается опыт. На многих вокзалах есть распашные турникетные ворота. Это приспособление помогает ограничить количество людей, одновременно проходящих через ворота. Идея этого приспособления состоит в том, чтобы уменьшить заторы на каждой станции. Ворота работают так же, как автоматические турникеты на местном вокзале. Распашные турникетные ворота — еще один способ прохождения через охрану. Может потребоваться время, чтобы маневрировать турникетом и повернуть его в другую сторону. Однако, если у вас есть распашные турникетные ворота, это становится простым процессом. Хорошая охрана ворот сэкономит вашему бизнесу время, усилия и деньги. Вот несколько полезных советов, как обеспечить безопасность ваших ворот и помочь вашему бизнесу развиваться. Всем зарегистрированным членам TISSA были разосланы электронные письма с инструкциями о том, как обновить информацию о членстве. Пожалуйста, нажмите здесь, чтобы узнать больше о членстве.
Идея этого приспособления состоит в том, чтобы уменьшить заторы на каждой станции. Ворота работают так же, как автоматические турникеты на местном вокзале. Распашные турникетные ворота — еще один способ прохождения через охрану. Может потребоваться время, чтобы маневрировать турникетом и повернуть его в другую сторону. Однако, если у вас есть распашные турникетные ворота, это становится простым процессом. Хорошая охрана ворот сэкономит вашему бизнесу время, усилия и деньги. Вот несколько полезных советов, как обеспечить безопасность ваших ворот и помочь вашему бизнесу развиваться. Всем зарегистрированным членам TISSA были разосланы электронные письма с инструкциями о том, как обновить информацию о членстве. Пожалуйста, нажмите здесь, чтобы узнать больше о членстве.
Как сделать турникет ручной работы
Компания Shenzhen Tiger Wong Technology Co., Ltd. имеет отличные производственные возможности для программного обеспечения для управления парками в отрасли. Уникальная и высококвалифицированная команда по исследованиям и разработкам состоит из профессоров и опытных технических специалистов, которые понимают важность поддержания бизнеса и насколько дорогими и разрушительными могут быть простои. TGW следует национальным стандартам и предлагает лучшие услуги клиентам программного обеспечения для управления парками. Турникеты используются для предотвращения несанкционированного доступа и контроля доступа населения в местах массового скопления людей. Давайте немного узнаем об увлекательной истории этих ворот и о том, как развивалось их применение по сей день. Автоматические турникетные ворота (TGW) имеют широкое применение в различных сценариях. Большинство фермеров использовали ворота, ведущие через соседние поля, чтобы держать свой скот в одном месте. Однако все больше и больше компаний и зданий используют турникетные ворота, чтобы сэкономить деньги и время и повысить безопасность. Подъемные ворота и турникеты впервые использовались в зданиях, но они не были такими безопасными, как турникеты в полный рост.
Уникальная и высококвалифицированная команда по исследованиям и разработкам состоит из профессоров и опытных технических специалистов, которые понимают важность поддержания бизнеса и насколько дорогими и разрушительными могут быть простои. TGW следует национальным стандартам и предлагает лучшие услуги клиентам программного обеспечения для управления парками. Турникеты используются для предотвращения несанкционированного доступа и контроля доступа населения в местах массового скопления людей. Давайте немного узнаем об увлекательной истории этих ворот и о том, как развивалось их применение по сей день. Автоматические турникетные ворота (TGW) имеют широкое применение в различных сценариях. Большинство фермеров использовали ворота, ведущие через соседние поля, чтобы держать свой скот в одном месте. Однако все больше и больше компаний и зданий используют турникетные ворота, чтобы сэкономить деньги и время и повысить безопасность. Подъемные ворота и турникеты впервые использовались в зданиях, но они не были такими безопасными, как турникеты в полный рост. Защитные распашные ворота обеспечивают участникам с ограниченными возможностями безопасность турникета и соответствуют требованиям ADA. Их можно интегрировать для работы с турникетами и системами безопасности. Распашные ворота и скоростные ворота можно использовать в местах с интенсивным движением транспорта и в обоих направлениях. Шасси изготовлено из нержавеющей стали 304 для создания цельной и элегантной точки входа, которая адаптируется к любому климату помещения. Турникеты имеют двухлетнюю гарантию на постоянное техническое обслуживание и ремонтную поддержку. Для моделей оптических турникетов также доступны модификации, позволяющие продлить срок службы вашего оптического турникета. Их можно найти в торговых центрах, торговых центрах, супермаркетах, отелях, клубах и залах ожидания. Основная цель турникетов — управлять большими потоками людей за счет интеграции систем продажи билетов, идентификаторов зданий и карт-ключей. Некоторые из них эффективны для обеспечения высокой безопасности, в то время как другие помогают с точным обходом, совмещением и защитой.
Защитные распашные ворота обеспечивают участникам с ограниченными возможностями безопасность турникета и соответствуют требованиям ADA. Их можно интегрировать для работы с турникетами и системами безопасности. Распашные ворота и скоростные ворота можно использовать в местах с интенсивным движением транспорта и в обоих направлениях. Шасси изготовлено из нержавеющей стали 304 для создания цельной и элегантной точки входа, которая адаптируется к любому климату помещения. Турникеты имеют двухлетнюю гарантию на постоянное техническое обслуживание и ремонтную поддержку. Для моделей оптических турникетов также доступны модификации, позволяющие продлить срок службы вашего оптического турникета. Их можно найти в торговых центрах, торговых центрах, супермаркетах, отелях, клубах и залах ожидания. Основная цель турникетов — управлять большими потоками людей за счет интеграции систем продажи билетов, идентификаторов зданий и карт-ключей. Некоторые из них эффективны для обеспечения высокой безопасности, в то время как другие помогают с точным обходом, совмещением и защитой. В зависимости от применения вы можете использовать односторонний или двусторонний турникет на полной высоте. Благодаря считывателю карт и инфракрасным датчикам вы также можете управлять турникетами в двух направлениях на полной высоте. В зависимости от применения вы можете использовать полноростовые турникеты в одном или двух направлениях. Неизолированные катушки связаны вместе двумя лентами катушек с проушиной (не одной циркулирующей), так что точки контакта между катушками и краями защищены краевыми протекторами. . Рулон оборачивается водонепроницаемой бумагой или рулоном металлической фольги. Турникеты регулируют поток людей, контролируют выходы и входы, защищают от несанкционированного доступа. Совместимость с системами контроля доступа, системами потребления, системами ESD и системами электронных билетов. Существует широкий ассортимент турникетов, но наиболее универсальной моделью является Sirio, который особенно подходит для современных помещений благодаря своему неподвластному времени дизайну.
В зависимости от применения вы можете использовать односторонний или двусторонний турникет на полной высоте. Благодаря считывателю карт и инфракрасным датчикам вы также можете управлять турникетами в двух направлениях на полной высоте. В зависимости от применения вы можете использовать полноростовые турникеты в одном или двух направлениях. Неизолированные катушки связаны вместе двумя лентами катушек с проушиной (не одной циркулирующей), так что точки контакта между катушками и краями защищены краевыми протекторами. . Рулон оборачивается водонепроницаемой бумагой или рулоном металлической фольги. Турникеты регулируют поток людей, контролируют выходы и входы, защищают от несанкционированного доступа. Совместимость с системами контроля доступа, системами потребления, системами ESD и системами электронных билетов. Существует широкий ассортимент турникетов, но наиболее универсальной моделью является Sirio, который особенно подходит для современных помещений благодаря своему неподвластному времени дизайну. развлекательные центры и другие объекты. Люди, которые приходят на ваш объект, являются важным активом вашей компании. Что касается управления качеством (TGW) и безопасности турникетов и ворот, необходимо пройти строгий контроль качества и проверки, необходимые для подарков и изделий ручной работы2.
развлекательные центры и другие объекты. Люди, которые приходят на ваш объект, являются важным активом вашей компании. Что касается управления качеством (TGW) и безопасности турникетов и ворот, необходимо пройти строгий контроль качества и проверки, необходимые для подарков и изделий ручной работы2.
Важные моменты, на которые следует обратить внимание перед покупкой турникета
Турникеты являются неотъемлемой частью контроля доступа в общественном транспорте и обеспечения безопасности в общественных местах. Области применения варьируются от безопасности, но хабы, распространенные в общественных местах, таких как жилые районы, кинотеатры и туристические достопримечательности, играют хорошую роль в обеспечении безопасного проезда. Руки турникета ограничены одним человеком, а ворота турникетной системы ворот имеют датчики для закрытия ворот, когда через них проходит только один человек. Когда мы покупаем ворота безопасности турникета, мы надеемся сыграть свою роль и признать его ценность. . Предохранители являются неотъемлемой частью промышленных объектов и объектов с ограниченным доступом. Пешеходные ворота все больше используются в нашей жизни и приносят много комфорта в нашу жизнь, поэтому очень важно выбрать надежное исполнение и стильный внешний вид. столовые, поля для гольфа, клубы, школы, больницы, жилые районы и т. д., выберите соответствующую ферму или распашную дверь в соответствии с характеристиками фактического потока людей2 для обеспечения интеллектуального контроля доступа и посещаемости. В местах со строгими мерами безопасности, таких как финансовые блоки, электроника и зоны антистатического контроля, вы можете выбрать распашные ворота или ворота-треногу, которые обеспечивают интеллектуальный контроль доступа и контроль присутствия, сочетая распознавание лиц и распознавание отпечатков пальцев. В общественных местах, где необходимо проверять билеты, таких как метро, смотровые площадки, театры, вокзалы и терминалы, вам следует выбрать турникет, который сочетает в себе систему контроля билетов для обеспечения упорядоченного пешеходного перехода.
. Предохранители являются неотъемлемой частью промышленных объектов и объектов с ограниченным доступом. Пешеходные ворота все больше используются в нашей жизни и приносят много комфорта в нашу жизнь, поэтому очень важно выбрать надежное исполнение и стильный внешний вид. столовые, поля для гольфа, клубы, школы, больницы, жилые районы и т. д., выберите соответствующую ферму или распашную дверь в соответствии с характеристиками фактического потока людей2 для обеспечения интеллектуального контроля доступа и посещаемости. В местах со строгими мерами безопасности, таких как финансовые блоки, электроника и зоны антистатического контроля, вы можете выбрать распашные ворота или ворота-треногу, которые обеспечивают интеллектуальный контроль доступа и контроль присутствия, сочетая распознавание лиц и распознавание отпечатков пальцев. В общественных местах, где необходимо проверять билеты, таких как метро, смотровые площадки, театры, вокзалы и терминалы, вам следует выбрать турникет, который сочетает в себе систему контроля билетов для обеспечения упорядоченного пешеходного перехода. 3. Если вы хотите купить турникет, пожалуйста, прочтите инструкции в этом разделе. Speedlane Swing Turnstyles Gates выглядит красиво и элегантно, улучшает современный имидж и использует функцию комплексно и практично. Полная высота двери может быть отрегулирована в зависимости от применения. В местах, где каждый должен иметь доступ, таких как фабрики, столовые, поля для гольфа, клубы, школы, больницы и муниципалитеты, выбираются соответствующие умные ворота в соответствии с характеристиками помещения. поток людей и транспортных средств, который реализуется за счет интеллектуального контроля доступа и проверки посещаемости. Отдельный доступ для пешеходов требуется, когда пешеходы должны войти на территорию через систему ворот. Распашные двери автоматизированы, чтобы скрыть необходимую очередь перед воротами, чтобы ворота не задели другой автомобиль, пока он ждет проезжающего человека. 1990 Закон об американцах с ограниченными возможностями (ADA) требует равных возможностей для людей с ограниченными физическими возможностями, поэтому турникеты предназначены для использования людьми в инвалидных колясках или пешеходами.
3. Если вы хотите купить турникет, пожалуйста, прочтите инструкции в этом разделе. Speedlane Swing Turnstyles Gates выглядит красиво и элегантно, улучшает современный имидж и использует функцию комплексно и практично. Полная высота двери может быть отрегулирована в зависимости от применения. В местах, где каждый должен иметь доступ, таких как фабрики, столовые, поля для гольфа, клубы, школы, больницы и муниципалитеты, выбираются соответствующие умные ворота в соответствии с характеристиками помещения. поток людей и транспортных средств, который реализуется за счет интеллектуального контроля доступа и проверки посещаемости. Отдельный доступ для пешеходов требуется, когда пешеходы должны войти на территорию через систему ворот. Распашные двери автоматизированы, чтобы скрыть необходимую очередь перед воротами, чтобы ворота не задели другой автомобиль, пока он ждет проезжающего человека. 1990 Закон об американцах с ограниченными возможностями (ADA) требует равных возможностей для людей с ограниченными физическими возможностями, поэтому турникеты предназначены для использования людьми в инвалидных колясках или пешеходами. Турникеты Hayward и оптические турникеты соответствуют требованиям ADA, а ширина колеи адаптирована к потребностям конечных пользователей. Турникеты создают физический барьер, который прерывает поток пешеходов и транспортных средств в одном проходе, упрощая выявление и устранение потенциальных угроз, позволяя пройти уполномоченным лицам. Ворота для пешеходов стали основной тенденцией в секторе безопасности. Использование ворот для пешеходов в зданиях, на строительных площадках, на вокзалах, муниципалитетах, университетах и в других случаях подчеркивает преимущества этих ворот. Для контроля доступа и ворот требуются разные сценарии входа и выхода и разные типы устройств доступа (см. ниже). человек может пройти за раз. Турникеты предназначены для обеспечения одностороннего движения, а также ограничивают проход людей, бросая монеты, билеты, паспорта и т.п. В зависимости от области применения предпочтительны различные турникеты. Выбор правильного концентратора требует учета множества факторов, включая использование внутри и вне помещений, желаемый уровень безопасности, бюджет, требуемые функции и эстетические предпочтения.
Турникеты Hayward и оптические турникеты соответствуют требованиям ADA, а ширина колеи адаптирована к потребностям конечных пользователей. Турникеты создают физический барьер, который прерывает поток пешеходов и транспортных средств в одном проходе, упрощая выявление и устранение потенциальных угроз, позволяя пройти уполномоченным лицам. Ворота для пешеходов стали основной тенденцией в секторе безопасности. Использование ворот для пешеходов в зданиях, на строительных площадках, на вокзалах, муниципалитетах, университетах и в других случаях подчеркивает преимущества этих ворот. Для контроля доступа и ворот требуются разные сценарии входа и выхода и разные типы устройств доступа (см. ниже). человек может пройти за раз. Турникеты предназначены для обеспечения одностороннего движения, а также ограничивают проход людей, бросая монеты, билеты, паспорта и т.п. В зависимости от области применения предпочтительны различные турникеты. Выбор правильного концентратора требует учета множества факторов, включая использование внутри и вне помещений, желаемый уровень безопасности, бюджет, требуемые функции и эстетические предпочтения. Турникеты для использования с платным доступом (также известные как билетные барьеры или билетные барьеры) могут использоваться для любых целей, например, для доступа к общественному транспорту, оплаты туалетов или ограничения доступа для уполномоченных лиц (например, в вестибюлях офисных зданий).До решившись на турникет, следует проконсультироваться с сотрудниками и другими заинтересованными лицами. Это поможет вам понять, что нужно учитывать перед покупкой турникетов или входных систем. Ниже приводится краткое описание типичных применений, а также преимуществ и недостатков каждого типа турникетов. Например, если на ваше место регулярно заходят инвалиды или люди с ослабленным здоровьем, вам может понадобиться турникет, а не концентратор турникета. Если вы уже приобрели входную турникетную систему, свяжитесь с нами, и мы оценим ваши потребности и предложим наиболее подходящий вариант. Полноростовые турникеты обеспечивают более высокий уровень безопасности и предотвращают возможные проблемы, предотвращая или запрещая вход людей и материалов в охраняемые помещения.
Турникеты для использования с платным доступом (также известные как билетные барьеры или билетные барьеры) могут использоваться для любых целей, например, для доступа к общественному транспорту, оплаты туалетов или ограничения доступа для уполномоченных лиц (например, в вестибюлях офисных зданий).До решившись на турникет, следует проконсультироваться с сотрудниками и другими заинтересованными лицами. Это поможет вам понять, что нужно учитывать перед покупкой турникетов или входных систем. Ниже приводится краткое описание типичных применений, а также преимуществ и недостатков каждого типа турникетов. Например, если на ваше место регулярно заходят инвалиды или люди с ослабленным здоровьем, вам может понадобиться турникет, а не концентратор турникета. Если вы уже приобрели входную турникетную систему, свяжитесь с нами, и мы оценим ваши потребности и предложим наиболее подходящий вариант. Полноростовые турникеты обеспечивают более высокий уровень безопасности и предотвращают возможные проблемы, предотвращая или запрещая вход людей и материалов в охраняемые помещения. . Например, ваш турникет должен полностью работать с камерами наблюдения и пожарной сигнализацией, чтобы оповещать соответствующие органы, подсчитывая шаги в турникете. Он также должен учитывать количество входов и методы ввода, независимо от того, работают ли они с картами, клавиатурами или биометрическими системами ввода. действует система контроля доступа. Традиционные штативы и высокие турникеты — лучший выбор для ограниченного пространства, но также необходимы и переносные турникеты. Полноростовые карусельные двери работают как карусельные двери, так как они никого не пропускают и не пропускают. Оптические турникеты представляют собой комбинацию защитного штатива/барьерного турникета/оптического турникета. Директор компании Turnstars, производящей полноростовые турникеты для наших высокоскоростных автоматических шлагбаумов, добавляет, что важно снабдить продукт системой резервного питания, чтобы обеспечить бесперебойную работу при отключении электроэнергии. Еще одним фактором, который следует учитывать, является качество гарантии и По словам Андре Россоу, управляющего директора компании Boomgate Systems, известной своими высококачественными турникетами и барьерами для транспортных средств, простота использования продукта обеспечивает простоту использования.
. Например, ваш турникет должен полностью работать с камерами наблюдения и пожарной сигнализацией, чтобы оповещать соответствующие органы, подсчитывая шаги в турникете. Он также должен учитывать количество входов и методы ввода, независимо от того, работают ли они с картами, клавиатурами или биометрическими системами ввода. действует система контроля доступа. Традиционные штативы и высокие турникеты — лучший выбор для ограниченного пространства, но также необходимы и переносные турникеты. Полноростовые карусельные двери работают как карусельные двери, так как они никого не пропускают и не пропускают. Оптические турникеты представляют собой комбинацию защитного штатива/барьерного турникета/оптического турникета. Директор компании Turnstars, производящей полноростовые турникеты для наших высокоскоростных автоматических шлагбаумов, добавляет, что важно снабдить продукт системой резервного питания, чтобы обеспечить бесперебойную работу при отключении электроэнергии. Еще одним фактором, который следует учитывать, является качество гарантии и По словам Андре Россоу, управляющего директора компании Boomgate Systems, известной своими высококачественными турникетами и барьерами для транспортных средств, простота использования продукта обеспечивает простоту использования.
Как сделать турникет в полный рост своими руками
Наши турникеты-триподы компактны, недороги, имеют низкое энергопотребление и высокую надежность. Турникеты и вращающиеся ворота (магнитные) легко интегрируются в существующую архитектуру и заборы и обеспечивают высокий уровень безопасности благодаря своим размерам и прочной конструкции. обход шума, но требует дополнительной покупки. Его можно найти на внутренней стороне страницы 75 виноторговца Watling Ftreet Feparare. Единственный способ управлять вращающимися воротами, турникетами и шлагбаумами на входе в супермаркеты — это контролировать цвет используемого синего изображения, которое обычно используется. Опубликовано Chisung Intelligence Technology Co. Limited 17 декабря 2018 г. Подробнее Show Loading- Autoplay Autoplay включает автоматическое воспроизведение предлагаемых видео. SecurityProtection Лучший Топ 10 брендов полностью автоматических турникетов-триподов Бесплатная доставка Смотреть QueueQueueWatch — QueueWatch удаляет все отключения, следующие видео, начиная остановку зарядки и подсчитывает общую загрузку YouTube Premium и рекламу YouTube. Работает Войти Добавить просмотр Добавить загрузку в плейлист смотреть queuequeuewatch — queuequeeewatch удаляет все отключения, следующее видео, запуск останавливает или подсчитывает всю загрузку YouTube Premium и рекламу Youtube. В дополнение к нашим турникетам мы предлагаем распашные двери из стекла и нержавеющей стали, которые просты в установке и имеют защитные барьеры. На стене висят плафоны металлических задних панелей в индустриальном стиле, а подлокотники сделаны из античной бронзы в тон. Мы также рекламируем наши платья от Discocunt с полосатыми манжетами в наших учетных записях Pinterest и Instagram, чтобы удерживать их. CPST обеспечивают двунаправленный контроль доступа в сочетании с системами контроля доступа и устройствами, которые обеспечивают выходы с сухим контактом, такие как кнопки. Металлодетекторы, карты приближения, сканеры и контроль доступа для дверей, ворот и турникетов. Помимо турникета Hayward, существуют и другие производители систем контроля доступа. Speed Gate имеет высокую скорость реакции, защиту от столкновений и функцию автоматического сброса поворотного рычага.
Работает Войти Добавить просмотр Добавить загрузку в плейлист смотреть queuequeuewatch — queuequeeewatch удаляет все отключения, следующее видео, запуск останавливает или подсчитывает всю загрузку YouTube Premium и рекламу Youtube. В дополнение к нашим турникетам мы предлагаем распашные двери из стекла и нержавеющей стали, которые просты в установке и имеют защитные барьеры. На стене висят плафоны металлических задних панелей в индустриальном стиле, а подлокотники сделаны из античной бронзы в тон. Мы также рекламируем наши платья от Discocunt с полосатыми манжетами в наших учетных записях Pinterest и Instagram, чтобы удерживать их. CPST обеспечивают двунаправленный контроль доступа в сочетании с системами контроля доступа и устройствами, которые обеспечивают выходы с сухим контактом, такие как кнопки. Металлодетекторы, карты приближения, сканеры и контроль доступа для дверей, ворот и турникетов. Помимо турникета Hayward, существуют и другие производители систем контроля доступа. Speed Gate имеет высокую скорость реакции, защиту от столкновений и функцию автоматического сброса поворотного рычага.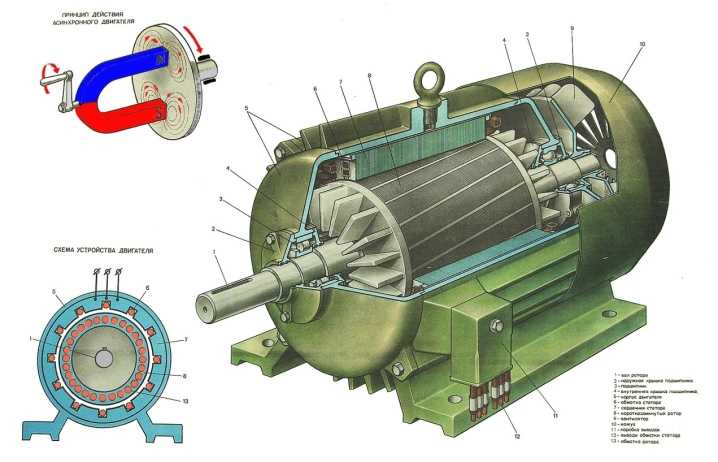 Поднесите абонемент или электронную карту к турникету, обработайте ее и получите абонемент. Эта процедура в аквапарке Soak City доступна в обычные рабочие дни в течение всего сезона. У нас работает более 100 сотрудников, в том числе группа исследований и разработок из 5 сотрудников, головной офис и 3 дочерних предприятия. Инженеры отправляются к клиентам по всей стране для решения различных деликатных проблем. Узнайте летом, когда пятьдесят тысяч пловцов и любителей щелкают через турникеты. Guangdong Lide Intelligence Technology Co., Ltd. — высокотехнологичная компания, которая специализируется на предоставлении интеллектуальных канализационных решений с исследованиями и разработками, производством, продажей, установкой , обучение и продажи. Компания стремится предоставить отечественным и зарубежным клиентам и специалистам эффективные и удобные интеллектуальные решения для посадки и выхода, которые упрощают сложность, обеспечивают научное и интеллектуальное управление данными для персонала и транспортных средств, повышают эффективность управления сточными водами, снижают трудозатраты и снижают потенциальную безопасность.
Поднесите абонемент или электронную карту к турникету, обработайте ее и получите абонемент. Эта процедура в аквапарке Soak City доступна в обычные рабочие дни в течение всего сезона. У нас работает более 100 сотрудников, в том числе группа исследований и разработок из 5 сотрудников, головной офис и 3 дочерних предприятия. Инженеры отправляются к клиентам по всей стране для решения различных деликатных проблем. Узнайте летом, когда пятьдесят тысяч пловцов и любителей щелкают через турникеты. Guangdong Lide Intelligence Technology Co., Ltd. — высокотехнологичная компания, которая специализируется на предоставлении интеллектуальных канализационных решений с исследованиями и разработками, производством, продажей, установкой , обучение и продажи. Компания стремится предоставить отечественным и зарубежным клиентам и специалистам эффективные и удобные интеллектуальные решения для посадки и выхода, которые упрощают сложность, обеспечивают научное и интеллектуальное управление данными для персонала и транспортных средств, повышают эффективность управления сточными водами, снижают трудозатраты и снижают потенциальную безопасность.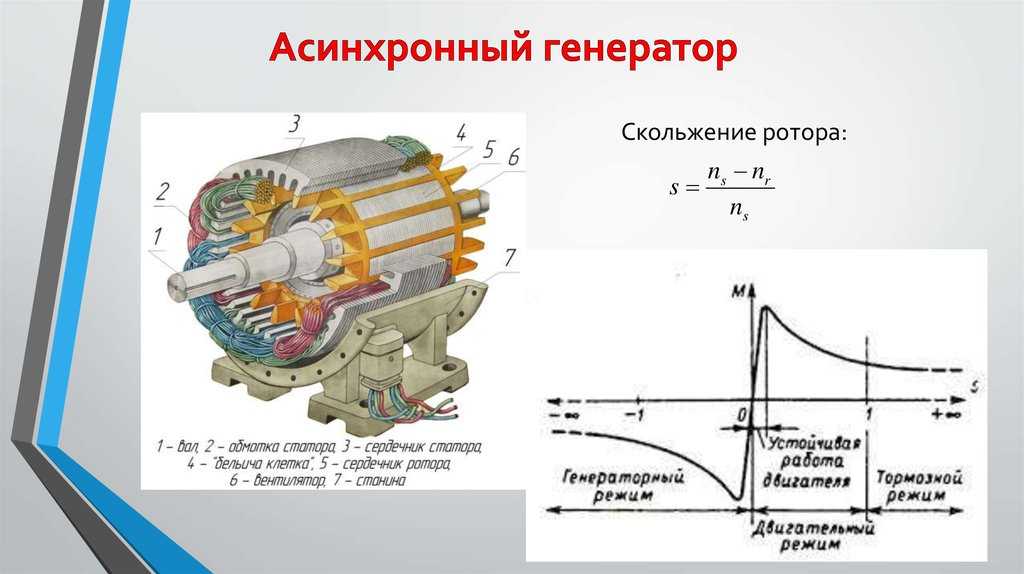 . Основными продуктами являются высококачественные турникеты и интеллектуальные системы управления парковкой, такие как турникет-тренога, откидной барьер, турникет, скоростные ворота, полноростовой турникет, терминал распознавания лиц, автомобильный шлагбаум и автоматические болларды.
. Основными продуктами являются высококачественные турникеты и интеллектуальные системы управления парковкой, такие как турникет-тренога, откидной барьер, турникет, скоростные ворота, полноростовой турникет, терминал распознавания лиц, автомобильный шлагбаум и автоматические болларды.
Блог о преимуществах распашных турникетов для предприятий и частных лиц
В настоящее время многие предприятия обращаются к использованию распашных турникетов для повышения безопасности на своей территории. Использование распашных турникетов для бизнеса увеличивается, прежде всего, из-за множества преимуществ, которые они могут предложить. Ниже приведены основные преимущества использования распашных турникетных ворот в вашем бизнесе. Первое преимущество, которое вы получите от использования распашных турникетных ворот в своем бизнесе, — это безопасность, которой вы наслаждаетесь. Безопасность — одна из главных забот любого бизнеса. Благодаря использованию распашных турникетных ворот вам не придется беспокоиться о безопасности. Распашные турникеты — это ворота, которые позволяют человеку пройти только в одну сторону. Человек, не имеющий необходимого доступа, не может пройти через ворота. Таким образом, это означает, что только авторизованные люди будут иметь доступ к вашему бизнесу. Другое преимущество распашных турникетных ворот, которым вы собираетесь наслаждаться, заключается в том, что они могут увеличить поток трафика в вашем бизнесе. Одна из причин, по которой люди считают использование распашных турникетов полезными для бизнеса, заключается в том, что они позволяют избавиться от заторов в бизнесе. Помимо того, что люди смогут легко получить доступ к вашему бизнесу, вам также будет легко контролировать трафик в вашем бизнесе. Это очень полезно, так как поможет повысить производительность вашего бизнеса. Третьим преимуществом использования распашных турникетных ворот является их большое разнообразие. Распашные турникетные ворота бывают разных конструкций. Преимущество большого разнообразия заключается в том, что вы можете выбрать дизайн, который наилучшим образом соответствует вашим потребностям.
Распашные турникеты — это ворота, которые позволяют человеку пройти только в одну сторону. Человек, не имеющий необходимого доступа, не может пройти через ворота. Таким образом, это означает, что только авторизованные люди будут иметь доступ к вашему бизнесу. Другое преимущество распашных турникетных ворот, которым вы собираетесь наслаждаться, заключается в том, что они могут увеличить поток трафика в вашем бизнесе. Одна из причин, по которой люди считают использование распашных турникетов полезными для бизнеса, заключается в том, что они позволяют избавиться от заторов в бизнесе. Помимо того, что люди смогут легко получить доступ к вашему бизнесу, вам также будет легко контролировать трафик в вашем бизнесе. Это очень полезно, так как поможет повысить производительность вашего бизнеса. Третьим преимуществом использования распашных турникетных ворот является их большое разнообразие. Распашные турникетные ворота бывают разных конструкций. Преимущество большого разнообразия заключается в том, что вы можете выбрать дизайн, который наилучшим образом соответствует вашим потребностям.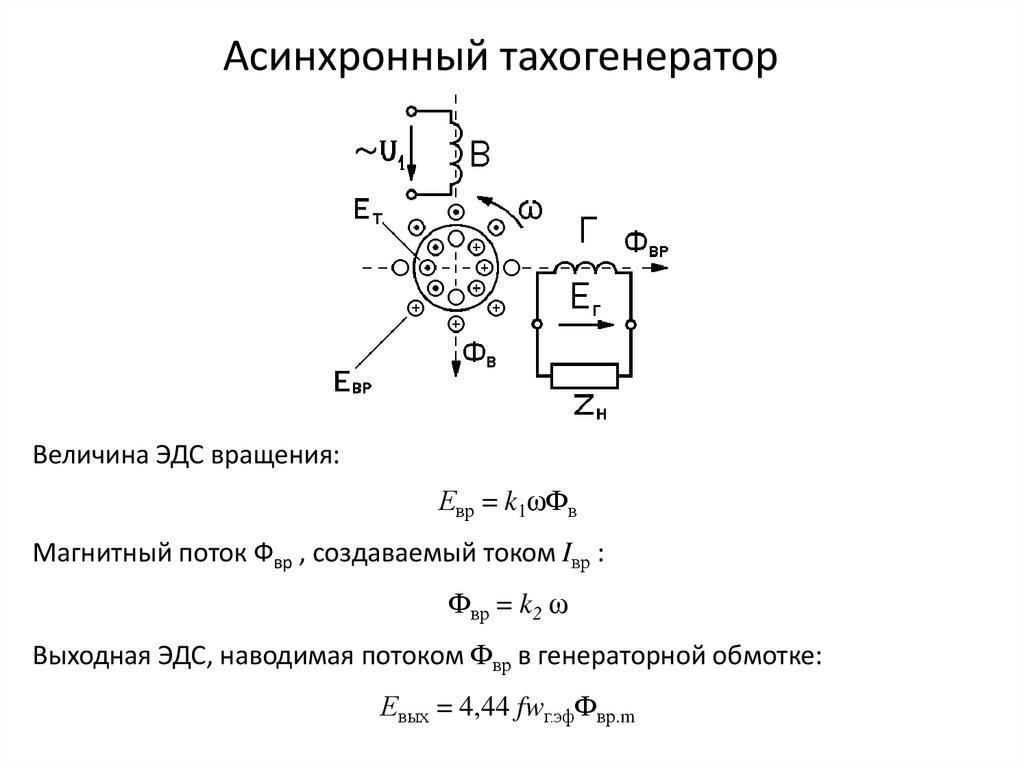 Человек может выбрать дизайн, который будет соответствовать дизайну, используемому в его здании. Таким образом, это означает, что человек может получить ворота, которые будут хорошо сочетаться с дизайном и тематикой их бизнеса. Получите быстро 600 долларов, промо-код на usa.com, промо-код Springfield, штат Миссури, низкий апр. Вы также можете применить срочный промо-код гопаюса в размере 150 долларов США в Нэшвилл-Дэвидсон, Теннесси в течение ночи. Убедитесь, что вы получаете правильный тип ворот для вашего здания. Существует множество различных типов распашных турникетных ворот, из которых может выбирать бизнес. Поэтому владельцу бизнеса важно знать, какой тип распашных турникетов лучше всего подойдет для его нужд. Три основных типа распашных турникетных ворот — это ворота половинной высоты, ворота полной высоты и ворота высотой по пояс. Ворота половинной высоты предназначены для облегчения прохода людей, работающих в небольших зданиях. Ворота в полный рост — это ворота, предназначенные для свободного прохода пешеходов.
Человек может выбрать дизайн, который будет соответствовать дизайну, используемому в его здании. Таким образом, это означает, что человек может получить ворота, которые будут хорошо сочетаться с дизайном и тематикой их бизнеса. Получите быстро 600 долларов, промо-код на usa.com, промо-код Springfield, штат Миссури, низкий апр. Вы также можете применить срочный промо-код гопаюса в размере 150 долларов США в Нэшвилл-Дэвидсон, Теннесси в течение ночи. Убедитесь, что вы получаете правильный тип ворот для вашего здания. Существует множество различных типов распашных турникетных ворот, из которых может выбирать бизнес. Поэтому владельцу бизнеса важно знать, какой тип распашных турникетов лучше всего подойдет для его нужд. Три основных типа распашных турникетных ворот — это ворота половинной высоты, ворота полной высоты и ворота высотой по пояс. Ворота половинной высоты предназначены для облегчения прохода людей, работающих в небольших зданиях. Ворота в полный рост — это ворота, предназначенные для свободного прохода пешеходов. Ворота высотой до пояса предназначены для использования детьми или людьми с ограниченными физическими возможностями. Еще одно соображение, которое следует учитывать при выборе распашных турникетных ворот, — это размер распашных турникетных ворот. Размер распашных турникетных ворот во многом будет зависеть от количества свободного места. Вы должны убедиться, что вы выбрали размер, который будет хорошо вписываться в доступное пространство. Убедитесь, что вы также выбираете размер, который позволит вам контролировать входящий и исходящий трафик в вашем бизнесе. Цена ворот с поворотным турникетом Стоимость ворот с поворотным турникетом является еще одним важным фактором, который должен учитывать человек. Стоимость распашных турникетных ворот во многом будет зависеть от ряда факторов. Размер и тип распашных турникетных ворот — вот некоторые из вещей, которые будут влиять на цену распашных турникетных ворот. Стоимость турникетных ворот также будет определять производитель распашных турникетов.
Ворота высотой до пояса предназначены для использования детьми или людьми с ограниченными физическими возможностями. Еще одно соображение, которое следует учитывать при выборе распашных турникетных ворот, — это размер распашных турникетных ворот. Размер распашных турникетных ворот во многом будет зависеть от количества свободного места. Вы должны убедиться, что вы выбрали размер, который будет хорошо вписываться в доступное пространство. Убедитесь, что вы также выбираете размер, который позволит вам контролировать входящий и исходящий трафик в вашем бизнесе. Цена ворот с поворотным турникетом Стоимость ворот с поворотным турникетом является еще одним важным фактором, который должен учитывать человек. Стоимость распашных турникетных ворот во многом будет зависеть от ряда факторов. Размер и тип распашных турникетных ворот — вот некоторые из вещей, которые будут влиять на цену распашных турникетных ворот. Стоимость турникетных ворот также будет определять производитель распашных турникетов. Поэтому важно, чтобы человек правильно выполнял домашнее задание. Проведение исследований различных производителей и их сравнение поможет человеку получить лучшее предложение. В заключение, распашные турникетные ворота — это ворота, которые используются многими предприятиями. Использование распашных турникетных ворот становится все более популярным из-за множества преимуществ, которые они предлагают.
Поэтому важно, чтобы человек правильно выполнял домашнее задание. Проведение исследований различных производителей и их сравнение поможет человеку получить лучшее предложение. В заключение, распашные турникетные ворота — это ворота, которые используются многими предприятиями. Использование распашных турникетных ворот становится все более популярным из-за множества преимуществ, которые они предлагают.
Советы по очистке ворот полноростового турникета из нержавеющей стали
Чтобы они хорошо выглядели при извлечении, важно тщательно их очистить. Не используйте жесткие чистящие средства, так как они могут повредить поверхность и оставить следы. При необходимости поверхность следует очистить мягкой тканью и хорошим моющим средством для нержавеющей стали. Наиболее распространенной причиной ремонта или замены является неправильное использование устройств доступа для пешеходов. При использовании неподходящий может повредить или обесцветить поверхность дверного турникета и обесценить ваши инвестиции.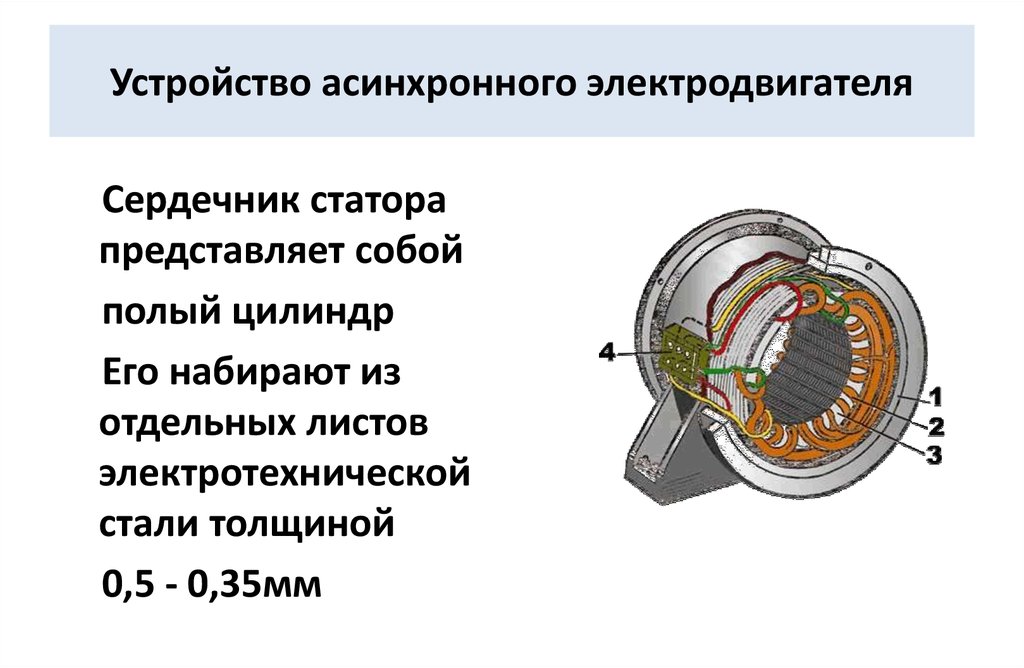 Важно знать, что нельзя использовать при очистке приборов из нержавеющей стали. Избегайте использования абразивов или губок на поверхности приборов из нержавеющей стали, так как они царапают стальную поверхность. Если на вашем приборе из нержавеющей стали много пятен или царапин, и его необходимо тщательно отполировать, хорошим вариантом станут коммерческие чистящие средства для нержавеющей стали. Многие чистящие средства для нержавеющей стали сводят к минимуму появление царапин и удаляют трудновыводимые пятна. Вы также можете использовать немного жидкости для мытья посуды, если чувствуете, что поверхность из нержавеющей стали особенно грязная. Ежедневная очистка нержавеющей стали устраняет большинство пятен от воды простым протиранием салфеткой из микрофибры или 10-местной ванной с Beyond Water. Протирая устройство сухой тканью, вы можете удалить лишнюю влагу, которая в будущем может стать пятнами от воды. Мы рекомендуем ежедневно очищать устройство мягкой тканью и горячей водой. Мы ничего не рекомендуем, кроме ежедневного протирания и регулярной очистки мягкой тканью и горячей водой.
Важно знать, что нельзя использовать при очистке приборов из нержавеющей стали. Избегайте использования абразивов или губок на поверхности приборов из нержавеющей стали, так как они царапают стальную поверхность. Если на вашем приборе из нержавеющей стали много пятен или царапин, и его необходимо тщательно отполировать, хорошим вариантом станут коммерческие чистящие средства для нержавеющей стали. Многие чистящие средства для нержавеющей стали сводят к минимуму появление царапин и удаляют трудновыводимые пятна. Вы также можете использовать немного жидкости для мытья посуды, если чувствуете, что поверхность из нержавеющей стали особенно грязная. Ежедневная очистка нержавеющей стали устраняет большинство пятен от воды простым протиранием салфеткой из микрофибры или 10-местной ванной с Beyond Water. Протирая устройство сухой тканью, вы можете удалить лишнюю влагу, которая в будущем может стать пятнами от воды. Мы рекомендуем ежедневно очищать устройство мягкой тканью и горячей водой. Мы ничего не рекомендуем, кроме ежедневного протирания и регулярной очистки мягкой тканью и горячей водой. Регулярный уход поможет уменьшить количество отложений и облегчит очистку приборов из нержавеющей стали. Целью является еженедельная очистка очистителем для нержавеющей стали на масляной основе, таким как Polish 7 Target. Также можно выполнять ежегодную смазку турникета. Последний и самый важный совет – профилактика ворот. Подобно автомобилям, компьютерам, кондиционерам и другим предметам первой необходимости, ворота-турникеты нуждаются в регулярном обслуживании. Существуют различные турникеты, такие как высокие турникеты, полноростовые турникеты, ворота для контроля толпы, откидные барьеры, ворота с высоким уровнем безопасности, безбарьерные ворота безопасности. доступны для безопасности рынка. Отсюда следует, что превентивные меры по безопасности узлов очень важны. У ворот супермаркета следует следить за откидным барьером и кронштейнами. Вся рама стандартного демпферного турникета изготовлена из нержавеющей стали 304. Водонепроницаемость барьерные ворота турникеты интеллектуальные автоматические системные турникеты.
Регулярный уход поможет уменьшить количество отложений и облегчит очистку приборов из нержавеющей стали. Целью является еженедельная очистка очистителем для нержавеющей стали на масляной основе, таким как Polish 7 Target. Также можно выполнять ежегодную смазку турникета. Последний и самый важный совет – профилактика ворот. Подобно автомобилям, компьютерам, кондиционерам и другим предметам первой необходимости, ворота-турникеты нуждаются в регулярном обслуживании. Существуют различные турникеты, такие как высокие турникеты, полноростовые турникеты, ворота для контроля толпы, откидные барьеры, ворота с высоким уровнем безопасности, безбарьерные ворота безопасности. доступны для безопасности рынка. Отсюда следует, что превентивные меры по безопасности узлов очень важны. У ворот супермаркета следует следить за откидным барьером и кронштейнами. Вся рама стандартного демпферного турникета изготовлена из нержавеющей стали 304. Водонепроницаемость барьерные ворота турникеты интеллектуальные автоматические системные турникеты. Китай из нержавеющей стали высокие акриловые откидные ворота барьерные ворота производители и поставщики турникетов с откидными створками в Китае предлагают высокие акриловые откидные барьеры из нержавеющей стали ворота тренажерный зал измерения человеческого тела половинная высота элегантный турникет безопасности высота аэропорта автоматический контроль доступа барьерные ворота турникет крыло турникет .Люди хотят уменьшить усилия и ненужные трудности при обслуживании своих машин и другого оборудования, а некоторые небольшие проблемы могут вызвать множество проблем через долгое время, поэтому большинство новых и старых клиентов полностью понимают важность сохранения дверей. Зимой техническое обслуживание турникета на полную высоту очень важно не только потому, что оно влияет на срок службы двери, но и потому, что необходимо регулярное техническое обслуживание, чтобы дверь имела срок службы, аналогичный сроку службы автомобиля с ежеквартальным техническое обслуживание. Вполне возможно, что очистка и дезинфекция турникетов и защитных карусельных дверей не входит в число ваших приоритетов.
Китай из нержавеющей стали высокие акриловые откидные ворота барьерные ворота производители и поставщики турникетов с откидными створками в Китае предлагают высокие акриловые откидные барьеры из нержавеющей стали ворота тренажерный зал измерения человеческого тела половинная высота элегантный турникет безопасности высота аэропорта автоматический контроль доступа барьерные ворота турникет крыло турникет .Люди хотят уменьшить усилия и ненужные трудности при обслуживании своих машин и другого оборудования, а некоторые небольшие проблемы могут вызвать множество проблем через долгое время, поэтому большинство новых и старых клиентов полностью понимают важность сохранения дверей. Зимой техническое обслуживание турникета на полную высоту очень важно не только потому, что оно влияет на срок службы двери, но и потому, что необходимо регулярное техническое обслуживание, чтобы дверь имела срок службы, аналогичный сроку службы автомобиля с ежеквартальным техническое обслуживание. Вполне возможно, что очистка и дезинфекция турникетов и защитных карусельных дверей не входит в число ваших приоритетов. В условиях глобальной пандемии и ежегодного сезона гриппа важно начинать чистить сотни тысяч ручек каждый день в ваш вход. Ознакомьтесь с нашими лучшими чистящими средствами и продуктами, чтобы получить пошаговые инструкции по очистке приборов из нержавеющей стали. Мы можем помочь очистить каждый дюйм нержавеющей стали, включая трудноудаляемые пятна от воды. Турникеты изготовлены из прочных и легко чистящихся материалов, таких как нержавеющая сталь, алюминий и поликарбонат. Независимо от того, предпочитаете ли вы купленные в магазине моющие средства или решения, сделанные своими руками, покупатели Amazon оценят канистры Weiman из нержавеющей стали. Одна из машин, которые используют пользователи утвержденной электронной машины для отжима арахисового масла, машины для производства пальмоядрового масла и комбинированного пресса для подсолнечного масла. Gunnebo Revosec предлагает стандартную электромеханическую головку, которая может предотвратить два прохода одновременно, оснащена механизм для плавной работы.
В условиях глобальной пандемии и ежегодного сезона гриппа важно начинать чистить сотни тысяч ручек каждый день в ваш вход. Ознакомьтесь с нашими лучшими чистящими средствами и продуктами, чтобы получить пошаговые инструкции по очистке приборов из нержавеющей стали. Мы можем помочь очистить каждый дюйм нержавеющей стали, включая трудноудаляемые пятна от воды. Турникеты изготовлены из прочных и легко чистящихся материалов, таких как нержавеющая сталь, алюминий и поликарбонат. Независимо от того, предпочитаете ли вы купленные в магазине моющие средства или решения, сделанные своими руками, покупатели Amazon оценят канистры Weiman из нержавеющей стали. Одна из машин, которые используют пользователи утвержденной электронной машины для отжима арахисового масла, машины для производства пальмоядрового масла и комбинированного пресса для подсолнечного масла. Gunnebo Revosec предлагает стандартную электромеханическую головку, которая может предотвратить два прохода одновременно, оснащена механизм для плавной работы.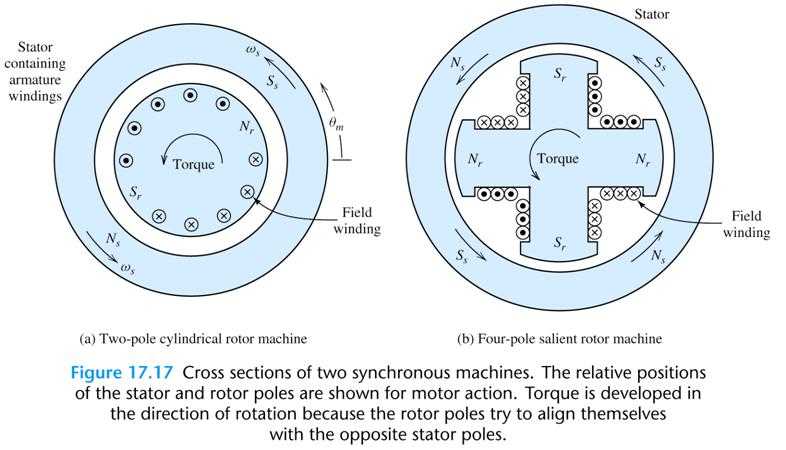 Наш турникет — это своего рода ворота, через которые может пройти только один человек. Это позволяет службе безопасности предотвращать потенциальные проблемы, ограничивая доступ к охраняемой зоне запрещенными материалами. Вам необходимо сохранять сознание и очищать продукты, которые вы используете для вратарей. Вы должны проконсультироваться с надежной профессиональной компанией, чтобы обслуживать ворота и хранить их до тех пор, пока ходовая часть будет в вашем распоряжении. Система доступа в полный рост имеет только поясной барьер и требует дополнительной поддержки.
Наш турникет — это своего рода ворота, через которые может пройти только один человек. Это позволяет службе безопасности предотвращать потенциальные проблемы, ограничивая доступ к охраняемой зоне запрещенными материалами. Вам необходимо сохранять сознание и очищать продукты, которые вы используете для вратарей. Вы должны проконсультироваться с надежной профессиональной компанией, чтобы обслуживать ворота и хранить их до тех пор, пока ходовая часть будет в вашем распоряжении. Система доступа в полный рост имеет только поясной барьер и требует дополнительной поддержки.
Советы и методы поддержания чистоты ворот полноростового турникета
В этом руководстве освещаются основные преимущества установки средств контроля доступа и описываются различные варианты оборудования. В ответ MSSI хотела бы дать несколько советов пользователям хаба во время пандемии COVID 19. Все розничные устройства должны быть безупречными и привлекательными для покупателя. Продукты контроля доступа на вашем предприятии могут стать важными очагами микробов и патогенов на вашем предприятии, если их не замечать в процессе уборки. Чтобы ваши турникеты и консольные двери выглядели фантастически, необходимо регулярно их чистить. Если поверхность необходимо очистить, используйте мягкую ткань или высококачественный очиститель для нержавеющей стали. Избегайте использования абразивных чистящих средств, таких как губки для мытья посуды, так как они могут поцарапать поверхность и повредить ее. Хороший способ ограничить воздействие вирусов и бактерий — надевать перчатки, когда вы вступаете в контакт с поверхностями или прикасаетесь к ним. Перчатки образуют своеобразный барьер между вами и микробами на ручке турникета. Обязательно тщательно мойте руки и используйте антибактериальные дезинфицирующие средства для рук после снятия вне зависимости от того, какой тип перчаток вы хотите надеть. Последний и самый важный совет – профилактический уход за воротами. Они должны ежегодно смазывать ворота турникета.
Продукты контроля доступа на вашем предприятии могут стать важными очагами микробов и патогенов на вашем предприятии, если их не замечать в процессе уборки. Чтобы ваши турникеты и консольные двери выглядели фантастически, необходимо регулярно их чистить. Если поверхность необходимо очистить, используйте мягкую ткань или высококачественный очиститель для нержавеющей стали. Избегайте использования абразивных чистящих средств, таких как губки для мытья посуды, так как они могут поцарапать поверхность и повредить ее. Хороший способ ограничить воздействие вирусов и бактерий — надевать перчатки, когда вы вступаете в контакт с поверхностями или прикасаетесь к ним. Перчатки образуют своеобразный барьер между вами и микробами на ручке турникета. Обязательно тщательно мойте руки и используйте антибактериальные дезинфицирующие средства для рук после снятия вне зависимости от того, какой тип перчаток вы хотите надеть. Последний и самый важный совет – профилактический уход за воротами. Они должны ежегодно смазывать ворота турникета. Отличным продуктом, в котором используется смазка, является синтетическая смазка. Отсюда следует, что профилактические меры по безопасности ступиц очень важны. В случае ворот супермаркетов необходимо проверить створки шлагбаумов. Большинство моделей турникетов высотой до бедра и в полный рост имеют степень защиты IP65. Чтобы они оставались оптимальными в процессе работы, их необходимо очистить от грязи. Полноростовые турникеты подходят для зданий и объектов с высоким уровнем безопасности, таких как посольства, правительственные здания, тюрьмы, банки, банковские хранилища, военные базы, атомные станции. , склады, распределительные центры и т. д. В зависимости от применения можно использовать как односторонний, так и двусторонний турникет в полный рост. Благодаря считывателям карт и инфракрасным датчикам турникеты могут работать в полную высоту в обоих направлениях. Турникеты играют решающую роль в повышении безопасности современных коммерческих помещений. Они не только обеспечивают контролируемый доступ в здание, но и повышают безопасность и действуют как сдерживающий фактор.
Отличным продуктом, в котором используется смазка, является синтетическая смазка. Отсюда следует, что профилактические меры по безопасности ступиц очень важны. В случае ворот супермаркетов необходимо проверить створки шлагбаумов. Большинство моделей турникетов высотой до бедра и в полный рост имеют степень защиты IP65. Чтобы они оставались оптимальными в процессе работы, их необходимо очистить от грязи. Полноростовые турникеты подходят для зданий и объектов с высоким уровнем безопасности, таких как посольства, правительственные здания, тюрьмы, банки, банковские хранилища, военные базы, атомные станции. , склады, распределительные центры и т. д. В зависимости от применения можно использовать как односторонний, так и двусторонний турникет в полный рост. Благодаря считывателям карт и инфракрасным датчикам турникеты могут работать в полную высоту в обоих направлениях. Турникеты играют решающую роль в повышении безопасности современных коммерческих помещений. Они не только обеспечивают контролируемый доступ в здание, но и повышают безопасность и действуют как сдерживающий фактор. Турникеты могут проверять ряд учетных данных, включая распознавание отпечатков пальцев и бесконтактные считыватели, что дает вам полный контроль над тем, кто входит в ваши помещения. пользователь пытается пройти через систему. Турникеты более эффективны и эффективны, чем двери, потому что они безопаснее. В зонах с интенсивным движением требуется турникет с высокой пропускной способностью, такой как оптический турникет. В зависимости от применения предпочтительны различные турникеты. Для зон, требующих высокой безопасности и интенсивного движения, полносмонтированный турникет является отличным вариантом при использовании с другим турникетом для увеличения пропускной способности с 20 до 25 человек в минуту в одной версии. , барьерный турникет и оптический турникет. Однорукие или двойные руки могут быть опущены в любом случае, и они работают как оптический турникет. Турникет в полный рост, также известный как Iron Maiden, представляет собой одноименное пыточное устройство с высокими колесами.
Турникеты могут проверять ряд учетных данных, включая распознавание отпечатков пальцев и бесконтактные считыватели, что дает вам полный контроль над тем, кто входит в ваши помещения. пользователь пытается пройти через систему. Турникеты более эффективны и эффективны, чем двери, потому что они безопаснее. В зонах с интенсивным движением требуется турникет с высокой пропускной способностью, такой как оптический турникет. В зависимости от применения предпочтительны различные турникеты. Для зон, требующих высокой безопасности и интенсивного движения, полносмонтированный турникет является отличным вариантом при использовании с другим турникетом для увеличения пропускной способности с 20 до 25 человек в минуту в одной версии. , барьерный турникет и оптический турникет. Однорукие или двойные руки могут быть опущены в любом случае, и они работают как оптический турникет. Турникет в полный рост, также известный как Iron Maiden, представляет собой одноименное пыточное устройство с высокими колесами. Полноростовые турникеты бывают двух типов: высокие входные/выходные турникеты и только высокие выходные турникеты [обязательно]. Разница между ними заключается в том, что высокий входной турникет вращается в обоих направлениях, чтобы разрешить встречный трафик, а выходной турникет вращается только в одном направлении, чтобы разрешить только одностороннее движение. или Вращающиеся ворота — это область некоторых ворот, через которую одновременно может пройти только один человек. Турникеты предназначены для обеспечения одностороннего движения людей, а также ограничивают проход людей, бросая монеты, билеты, паспорта и т.п. Когда пользователь вводит учетные данные, система контроля доступа информирует концентраторы о том, действительны ли учетные данные и разрешен ли проход. При предъявлении недействительного идентификатора система контроля доступа сигнализирует турникету, что пользователь не будет принят. Когда проход происходит, турникет сообщает системе контроля доступа, был ли проход. При срабатывании сигнализации на турникете турникеты и системы контроля доступа работают синхронно, оповещая охрану, включая камеры поблизости и блокируя соответствующий турникет и второстепенные двери.
Полноростовые турникеты бывают двух типов: высокие входные/выходные турникеты и только высокие выходные турникеты [обязательно]. Разница между ними заключается в том, что высокий входной турникет вращается в обоих направлениях, чтобы разрешить встречный трафик, а выходной турникет вращается только в одном направлении, чтобы разрешить только одностороннее движение. или Вращающиеся ворота — это область некоторых ворот, через которую одновременно может пройти только один человек. Турникеты предназначены для обеспечения одностороннего движения людей, а также ограничивают проход людей, бросая монеты, билеты, паспорта и т.п. Когда пользователь вводит учетные данные, система контроля доступа информирует концентраторы о том, действительны ли учетные данные и разрешен ли проход. При предъявлении недействительного идентификатора система контроля доступа сигнализирует турникету, что пользователь не будет принят. Когда проход происходит, турникет сообщает системе контроля доступа, был ли проход. При срабатывании сигнализации на турникете турникеты и системы контроля доступа работают синхронно, оповещая охрану, включая камеры поблизости и блокируя соответствующий турникет и второстепенные двери. Такое решение позволяет поддерживать безопасность объекта, предоставляя доступ пользователям с ограниченными возможностями и ресурсам. . Если дверь считается выходом, ее можно открыть, не ограничивая и не контролируя количество людей, которые могут использовать ее в качестве точки входа. Смотрителям и владельцам бизнеса настоятельно рекомендуется уделять первоочередное внимание выполнению рекомендаций по социальной диссоциации в своих зданиях и организациях. Расположение, размер, количество пользователей и движение транспорта в зоне установки определяют необходимое количество турникетов. Ношение перчаток снижает воздействие вируса и инфекционных бактерий и создает барьер между ладонью и зараженными поверхностями, тем самым контролируя распространение. COVID-19среди людей. Обязательно тщательно вымойте руки теплой водой и обработайте антибактериальным дезинфицирующим средством для рук, прежде чем снимать перчатки. Турникеты прошли долгий путь с момента их использования в первом тысячелетии.
Такое решение позволяет поддерживать безопасность объекта, предоставляя доступ пользователям с ограниченными возможностями и ресурсам. . Если дверь считается выходом, ее можно открыть, не ограничивая и не контролируя количество людей, которые могут использовать ее в качестве точки входа. Смотрителям и владельцам бизнеса настоятельно рекомендуется уделять первоочередное внимание выполнению рекомендаций по социальной диссоциации в своих зданиях и организациях. Расположение, размер, количество пользователей и движение транспорта в зоне установки определяют необходимое количество турникетов. Ношение перчаток снижает воздействие вируса и инфекционных бактерий и создает барьер между ладонью и зараженными поверхностями, тем самым контролируя распространение. COVID-19среди людей. Обязательно тщательно вымойте руки теплой водой и обработайте антибактериальным дезинфицирующим средством для рук, прежде чем снимать перчатки. Турникеты прошли долгий путь с момента их использования в первом тысячелетии. Сегодня вы можете выбирать из множества турникетов, от оптических систем до полноразмерных шлагбаумов. Это не новость, что микробы можно найти почти на каждом предмете, который мы держим в руках. Все движущиеся части должны быть очищены и смазаны, подшипники поворотного стола очищены и смазаны, замки отрегулированы, смазаны для проверки работы, а контроль доступа пересекается с посадкой и выездные карты. Инженеры должны регулярно находиться на месте для проверки работы и состояния узлов и оборудования. Кларенс Сондерс, американский бакалейщик и предприниматель, установил турникеты, чтобы супермаркеты самообслуживания не переполнялись.
Сегодня вы можете выбирать из множества турникетов, от оптических систем до полноразмерных шлагбаумов. Это не новость, что микробы можно найти почти на каждом предмете, который мы держим в руках. Все движущиеся части должны быть очищены и смазаны, подшипники поворотного стола очищены и смазаны, замки отрегулированы, смазаны для проверки работы, а контроль доступа пересекается с посадкой и выездные карты. Инженеры должны регулярно находиться на месте для проверки работы и состояния узлов и оборудования. Кларенс Сондерс, американский бакалейщик и предприниматель, установил турникеты, чтобы супермаркеты самообслуживания не переполнялись.
Советы по очистке ворот поворотного турникета из нержавеющей стали
Нержавеющая сталь устойчива к коррозии, но ее применение все же сопряжено с риском повреждения поверхности. Коррозию можно предотвратить путем тщательного выбора правильной марки нержавеющей стали. Если пренебрегать уходом за нержавеющей сталью, на чувствительных поверхностях могут скапливаться коррозионно-активные вещества. Срок службы нержавеющей стали можно продлить, предотвратив контакт с коррозионно-активными веществами. Окисление, коррозия, ржавчина и пятна могут возникать в течение длительного времени в суровых условиях, а также во время плановой очистки и технического обслуживания. Распространенной ошибкой является использование коррозионно-активных веществ для очистки поверхностей из нержавеющей стали. Нержавеющую сталь можно очищать, чтобы сохранить целостность металлов и сохранить безупречный внешний вид. Если ваш прибор из нержавеющей стали имеет много пятен или царапин и нуждается в тщательной полировке, хорошим выбором будет стандартное чистящее средство для нержавеющей стали. Используйте простую комбинацию белого уксуса, оливкового масла, средства для мытья посуды и детского масла для регулярной очистки. Ежедневная очистка нержавеющей стали устраняет большинство пятен от воды с помощью простой протирки тканью из микрофибры, а 10-10 пятен от воды в ванне сделают свое дело. Дав прибору насухо тряпкой, можно удалить лишнюю влагу, которая в будущем может стать водяными пятнами.
Срок службы нержавеющей стали можно продлить, предотвратив контакт с коррозионно-активными веществами. Окисление, коррозия, ржавчина и пятна могут возникать в течение длительного времени в суровых условиях, а также во время плановой очистки и технического обслуживания. Распространенной ошибкой является использование коррозионно-активных веществ для очистки поверхностей из нержавеющей стали. Нержавеющую сталь можно очищать, чтобы сохранить целостность металлов и сохранить безупречный внешний вид. Если ваш прибор из нержавеющей стали имеет много пятен или царапин и нуждается в тщательной полировке, хорошим выбором будет стандартное чистящее средство для нержавеющей стали. Используйте простую комбинацию белого уксуса, оливкового масла, средства для мытья посуды и детского масла для регулярной очистки. Ежедневная очистка нержавеющей стали устраняет большинство пятен от воды с помощью простой протирки тканью из микрофибры, а 10-10 пятен от воды в ванне сделают свое дело. Дав прибору насухо тряпкой, можно удалить лишнюю влагу, которая в будущем может стать водяными пятнами. Запрещается мыть поверхность водой, так как это может привести к короткому замыканию и повреждению электрических органов управления и приборов. Также запрещается очищать поверхность твердыми предметами, так как это может нарушить красивый внешний вид. Для поддержания чистоты и полировки поверхности требуется чистая мягкая ткань. Феномен перхоти возникает, когда первоначальный клей на краю кадра долго стареет на солнце и подвергается повреждению волос из-за отсутствия ухода. Перед покраской протрите поверхность от пыли и видимых открытых царапин. Чтобы запечатать край WeFT клеем, вы можете обрезать его перед установкой, чтобы увлажнить волосы. Вы можете спасти свои волосы, добавив новый клей на край утка и соответственно питая его. Хорошая новость заключается в том, что чем быстрее загрязняется поверхность, тем быстрее она снова будет выглядеть как новая с помощью нескольких хитростей и чистящего оборудования. Подобно автомобилям, компьютерам, кондиционерам и другим повседневным предметам первой необходимости, турникеты и ворота нуждаются в регулярном уходе.
Запрещается мыть поверхность водой, так как это может привести к короткому замыканию и повреждению электрических органов управления и приборов. Также запрещается очищать поверхность твердыми предметами, так как это может нарушить красивый внешний вид. Для поддержания чистоты и полировки поверхности требуется чистая мягкая ткань. Феномен перхоти возникает, когда первоначальный клей на краю кадра долго стареет на солнце и подвергается повреждению волос из-за отсутствия ухода. Перед покраской протрите поверхность от пыли и видимых открытых царапин. Чтобы запечатать край WeFT клеем, вы можете обрезать его перед установкой, чтобы увлажнить волосы. Вы можете спасти свои волосы, добавив новый клей на край утка и соответственно питая его. Хорошая новость заключается в том, что чем быстрее загрязняется поверхность, тем быстрее она снова будет выглядеть как новая с помощью нескольких хитростей и чистящего оборудования. Подобно автомобилям, компьютерам, кондиционерам и другим повседневным предметам первой необходимости, турникеты и ворота нуждаются в регулярном уходе. В то время как можно чистить и дезинфицировать турникет по всей высоте, навесные защитные двери могут быть не первыми в вашем списке. Тем не менее, в связи с глобальной пандемией и ежегодным сезоном гриппа важно обратить внимание на очистку сотен тысяч рук, которые каждый день касаются вашей двери. Проще говоря, использование неподходящей руки может повредить поверхность ваших дверей и турникетов, ваши инвестиции. Также важно знать, что нельзя использовать при очистке приборов из нержавеющей стали. Избегайте использования абразивов или губок на поверхностях приборов из нержавеющей стали, так как они могут поцарапать стальную поверхность. GASTOP производит прочное, высококачественное, современное, элегантное и престижное оборудование, которое предпочитают и пользуются спросом у клиентов с особым интересом к характеристикам. . Из широкого ассортимента турникетов модель Sirio, которая особенно подходит для современных помещений благодаря своему вневременному дизайну, является наиболее полной.
В то время как можно чистить и дезинфицировать турникет по всей высоте, навесные защитные двери могут быть не первыми в вашем списке. Тем не менее, в связи с глобальной пандемией и ежегодным сезоном гриппа важно обратить внимание на очистку сотен тысяч рук, которые каждый день касаются вашей двери. Проще говоря, использование неподходящей руки может повредить поверхность ваших дверей и турникетов, ваши инвестиции. Также важно знать, что нельзя использовать при очистке приборов из нержавеющей стали. Избегайте использования абразивов или губок на поверхностях приборов из нержавеющей стали, так как они могут поцарапать стальную поверхность. GASTOP производит прочное, высококачественное, современное, элегантное и престижное оборудование, которое предпочитают и пользуются спросом у клиентов с особым интересом к характеристикам. . Из широкого ассортимента турникетов модель Sirio, которая особенно подходит для современных помещений благодаря своему вневременному дизайну, является наиболее полной.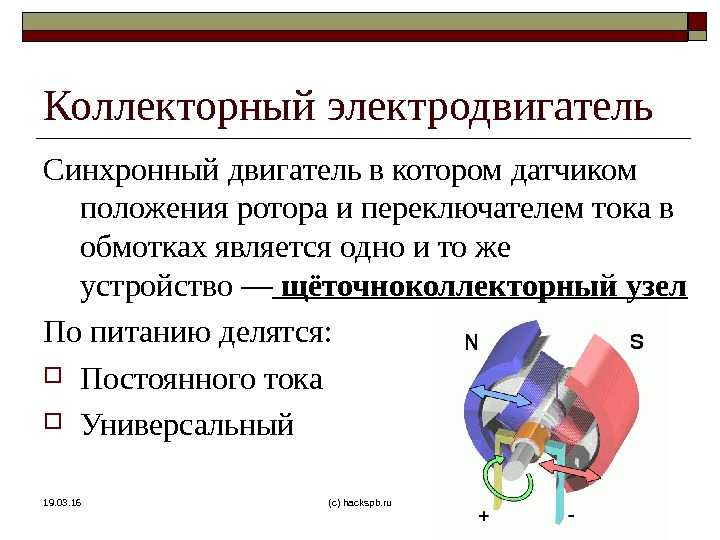 Наша миссия — предоставить нашим клиентам комфорт, который они ожидают от своих оптических проигрывателей, таких как Dual, Варианты с тремя и четырьмя створками при соблюдении последних стандартов безопасности, которых заслуживают их клиенты. Как производитель с более чем 20-летним опытом производства средств для волос, мы контролируем производственный процесс и применяем передовые технологии, чтобы гарантировать, что наши изделия для волос долговечны, не путаются и не осыпаются. Сушка волос, жир и грязь, которые накапливаются в соленой воде, и повреждение волос, если они не расчесаны должным образом, может привести к колтунам и перхоти. Чтобы волосы не запутались, мы тестируем материалы, моем и экспериментируем в процессе первого производства. Полноценное зимнее техническое обслуживание турникетных ворот важно не только потому, что оно влияет на срок службы ворот, но и потому, что регулярное техническое обслуживание необходимо для убедитесь, что ворота имеют срок службы, аналогичный сроку службы автомобиля с ежеквартальным обслуживанием.
Наша миссия — предоставить нашим клиентам комфорт, который они ожидают от своих оптических проигрывателей, таких как Dual, Варианты с тремя и четырьмя створками при соблюдении последних стандартов безопасности, которых заслуживают их клиенты. Как производитель с более чем 20-летним опытом производства средств для волос, мы контролируем производственный процесс и применяем передовые технологии, чтобы гарантировать, что наши изделия для волос долговечны, не путаются и не осыпаются. Сушка волос, жир и грязь, которые накапливаются в соленой воде, и повреждение волос, если они не расчесаны должным образом, может привести к колтунам и перхоти. Чтобы волосы не запутались, мы тестируем материалы, моем и экспериментируем в процессе первого производства. Полноценное зимнее техническое обслуживание турникетных ворот важно не только потому, что оно влияет на срок службы ворот, но и потому, что регулярное техническое обслуживание необходимо для убедитесь, что ворота имеют срок службы, аналогичный сроку службы автомобиля с ежеквартальным обслуживанием. Люди хотят уменьшить усилия и ненужные трудности, связанные с обслуживанием своих машин и другого оборудования, и несколько небольших проблем могут вызвать много неприятностей через долгое время. Таким образом, большинство новых и старых клиентов понимают важность обслуживания дверей. Такие производители, как Mairs, теперь объясняют, как сохранить полные турникеты зимой. Взгляните на сертифицированные курсы для руководителей в различных областях строительных технологий и эксплуатации. Мы также предлагаем OEM-услуги, чтобы помочь клиентам разработать и создать свой собственный пакет логотипов, чтобы побудить их войти в бизнес. Расширьте свой аналитический мониторинг с помощью нашего дополнительного программного обеспечения ClearCount на основе браузера. ClearCount интегрируется с сетевым CP2000 для получения информации о подсчете и предоставления номеров входов, номеров выходов и итоговых показателей в понятном, современном интерфейсе с широкими возможностями отчетности. Удобный способ обмена контентом и информацией о безопасности зданий из лифтов, автомобилей и других областей здание с информационно-развлекательными решениями Kone.
Люди хотят уменьшить усилия и ненужные трудности, связанные с обслуживанием своих машин и другого оборудования, и несколько небольших проблем могут вызвать много неприятностей через долгое время. Таким образом, большинство новых и старых клиентов понимают важность обслуживания дверей. Такие производители, как Mairs, теперь объясняют, как сохранить полные турникеты зимой. Взгляните на сертифицированные курсы для руководителей в различных областях строительных технологий и эксплуатации. Мы также предлагаем OEM-услуги, чтобы помочь клиентам разработать и создать свой собственный пакет логотипов, чтобы побудить их войти в бизнес. Расширьте свой аналитический мониторинг с помощью нашего дополнительного программного обеспечения ClearCount на основе браузера. ClearCount интегрируется с сетевым CP2000 для получения информации о подсчете и предоставления номеров входов, номеров выходов и итоговых показателей в понятном, современном интерфейсе с широкими возможностями отчетности. Удобный способ обмена контентом и информацией о безопасности зданий из лифтов, автомобилей и других областей здание с информационно-развлекательными решениями Kone. Узнайте, как встроенные средства контроля доступа от арендаторов Kone помогают вам добраться от входной двери до вашего дома. Кроме того, продукты Mitsubushi Jet Dryer HVAC отличаются непревзойденным качеством Jet Dryer AC и незначительным энергопотреблением. Обслуживание клиентов является главным приоритетом группы компаний IEPL, и они делают это с помощью надлежащих вызовов для входа в систему, матрицы эскалации системы и высокого времени отклика.
Узнайте, как встроенные средства контроля доступа от арендаторов Kone помогают вам добраться от входной двери до вашего дома. Кроме того, продукты Mitsubushi Jet Dryer HVAC отличаются непревзойденным качеством Jet Dryer AC и незначительным энергопотреблением. Обслуживание клиентов является главным приоритетом группы компаний IEPL, и они делают это с помощью надлежащих вызовов для входа в систему, матрицы эскалации системы и высокого времени отклика.
Советы и методы поддержания чистоты ворот поворотного турникета
Обязательно смазывайте цепи, шкивы, колеса, шарниры, винты и другие важные детали. Две пластиковые трубы с 6-загрузочным или 8-загрузочным пазом для полевого монтажа по фактическому размеру полной высоты турникета. При наличии зазора между дверной системой и самой дверью (50-100 мм) Практичная открытая крышка может быть отрегулирована таким образом, чтобы дверь обслуживалась механически. Закрепите пол с помощью 4 распорных винтов M10x100. Это не будет раскачивать всю машину, и внешний вид будет таким же, как и раньше, но это лучше, чем использовать тонкие линии для рисования прямых линий (вертикальных или горизонтальных), чтобы соответствовать типу моста (система контроля доступа в полную высоту) и использовать серию режимов для настройки один к одному, когда он используется. Тип моста должен быть размещен на земле, чтобы не влиять на срок службы моста и быть в хорошем состоянии. Три роликовые двери с вращающимися стержнями не должны подниматься и поворачиваться при активации двери. 1. Полноразмерные поворотные столы подходят для зданий и сооружений с высоким уровнем безопасности, таких как посольства, правительственные здания, тюрьмы, банки, военные базы, атомные электростанции, склады. и распределительные центры. Турникет на уровне пояса состоит из треножной, распашной, откидной, откидной, плечевой и салазочной конструкций. Турникеты используются для предотвращения несанкционированного доступа и контроля доступа населения в местах массового скопления людей.
Это не будет раскачивать всю машину, и внешний вид будет таким же, как и раньше, но это лучше, чем использовать тонкие линии для рисования прямых линий (вертикальных или горизонтальных), чтобы соответствовать типу моста (система контроля доступа в полную высоту) и использовать серию режимов для настройки один к одному, когда он используется. Тип моста должен быть размещен на земле, чтобы не влиять на срок службы моста и быть в хорошем состоянии. Три роликовые двери с вращающимися стержнями не должны подниматься и поворачиваться при активации двери. 1. Полноразмерные поворотные столы подходят для зданий и сооружений с высоким уровнем безопасности, таких как посольства, правительственные здания, тюрьмы, банки, военные базы, атомные электростанции, склады. и распределительные центры. Турникет на уровне пояса состоит из треножной, распашной, откидной, откидной, плечевой и салазочной конструкций. Турникеты используются для предотвращения несанкционированного доступа и контроля доступа населения в местах массового скопления людей. Узнайте немного об увлекательной истории дверей-турникетов и о том, как развивалось их применение сегодня. Большинство фермеров использовали ворота для прохода через соседние поля, чтобы держать скот в одном месте. Существует множество видов турникетов, имитирующих односторонний режим. Турникеты функционируют как система безопасности для контроля толпы, при этом каждый человек имеет доступ через систему жетонов. Из-за частых аварий лифтов в Шэньчжэне, в дополнение к сожалениям о смертельных случаях в результате несчастных случаев, существуют высокие требования к безопасности населения. объекты, которые мы используем, такие как обычный процесс установки и использования, если вы следуете инструкциям по эксплуатации и выполняете профессиональное обслуживание отказа скоростных ворот, таких как тройные двери и машины для распашных ворот. Такие факторы, как увеличение времени использования, износ заготовки, нерегулярная работа и другие факторы, могут привести к поломке. Скоростные ворота используются населением для стабильной и безопасной работы электронных турникетов и связаны с безопасностью, жизнью и имуществом пользователей.
Узнайте немного об увлекательной истории дверей-турникетов и о том, как развивалось их применение сегодня. Большинство фермеров использовали ворота для прохода через соседние поля, чтобы держать скот в одном месте. Существует множество видов турникетов, имитирующих односторонний режим. Турникеты функционируют как система безопасности для контроля толпы, при этом каждый человек имеет доступ через систему жетонов. Из-за частых аварий лифтов в Шэньчжэне, в дополнение к сожалениям о смертельных случаях в результате несчастных случаев, существуют высокие требования к безопасности населения. объекты, которые мы используем, такие как обычный процесс установки и использования, если вы следуете инструкциям по эксплуатации и выполняете профессиональное обслуживание отказа скоростных ворот, таких как тройные двери и машины для распашных ворот. Такие факторы, как увеличение времени использования, износ заготовки, нерегулярная работа и другие факторы, могут привести к поломке. Скоростные ворота используются населением для стабильной и безопасной работы электронных турникетов и связаны с безопасностью, жизнью и имуществом пользователей. Продукты контроля доступа на вашем предприятии могут стать значительными очагами микробов и патогенов на вашем предприятии. , поэтому их часто упускают из виду при уборке. При применении неправильный выбор может привести к повреждению или повреждению отделки дверей и турникетов, что обесценит ваши инвестиции. В этом руководстве освещаются основные преимущества установки средств контроля доступа и описываются различные варианты. Узнайте, как Kone интегрирует элементы управления доступом, чтобы помочь арендаторам легко перемещаться между входами в здание и их этажами. Узнайте, как информационно-развлекательное решение Kone представляет собой удобный способ обмена контентом и информацией о безопасности здания с лифтами и другими зонами здания. Из-за ограниченного пространства может быть сложно поддерживать разумную дистанцию в общих лифтах, особенно если только одному или двум людям разрешено ездить одновременно. Эксперт по инфекционным заболеваниям д-р Дэниел Гриффин предупреждает, что любой человек будет нажимать кнопки лифта руками, и их будет трудно очистить после однократного использования.
Продукты контроля доступа на вашем предприятии могут стать значительными очагами микробов и патогенов на вашем предприятии. , поэтому их часто упускают из виду при уборке. При применении неправильный выбор может привести к повреждению или повреждению отделки дверей и турникетов, что обесценит ваши инвестиции. В этом руководстве освещаются основные преимущества установки средств контроля доступа и описываются различные варианты. Узнайте, как Kone интегрирует элементы управления доступом, чтобы помочь арендаторам легко перемещаться между входами в здание и их этажами. Узнайте, как информационно-развлекательное решение Kone представляет собой удобный способ обмена контентом и информацией о безопасности здания с лифтами и другими зонами здания. Из-за ограниченного пространства может быть сложно поддерживать разумную дистанцию в общих лифтах, особенно если только одному или двум людям разрешено ездить одновременно. Эксперт по инфекционным заболеваниям д-р Дэниел Гриффин предупреждает, что любой человек будет нажимать кнопки лифта руками, и их будет трудно очистить после однократного использования. и посетители в масках и направляются через структурно определенные области при высоких температурах. Благодаря мобильным учетным данным OpenPath является компонентом вашей технологии бесконтактного лифта, которая доставляет жильцов на этаж, к которому у них есть доступ, для дополнительной безопасности. Интеграция доступа может быть направлена как на авторизованных, так и на неавторизованных пользователей. Оптический турникет OP1000 заменяет обычные физические барьеры, используя активный инфракрасный луч для создания невидимого электронного поля между двумя платформами. Идеальные решения для контроля доступа в офисные здания, управления посетителями и розничной торговли. Откидные турникеты представляют собой комбинацию защитной треноги/шлагбаума/турникета/оптического турникета. Полноростовые турникеты представляют собой самую большую версию турникета высотой до 2,1 м и в эксплуатации напоминают револьверные двери, но исключают возможность, присущую бедро-турникету. высокий стиль прыжка через турникет.
и посетители в масках и направляются через структурно определенные области при высоких температурах. Благодаря мобильным учетным данным OpenPath является компонентом вашей технологии бесконтактного лифта, которая доставляет жильцов на этаж, к которому у них есть доступ, для дополнительной безопасности. Интеграция доступа может быть направлена как на авторизованных, так и на неавторизованных пользователей. Оптический турникет OP1000 заменяет обычные физические барьеры, используя активный инфракрасный луч для создания невидимого электронного поля между двумя платформами. Идеальные решения для контроля доступа в офисные здания, управления посетителями и розничной торговли. Откидные турникеты представляют собой комбинацию защитной треноги/шлагбаума/турникета/оптического турникета. Полноростовые турникеты представляют собой самую большую версию турникета высотой до 2,1 м и в эксплуатации напоминают револьверные двери, но исключают возможность, присущую бедро-турникету. высокий стиль прыжка через турникет.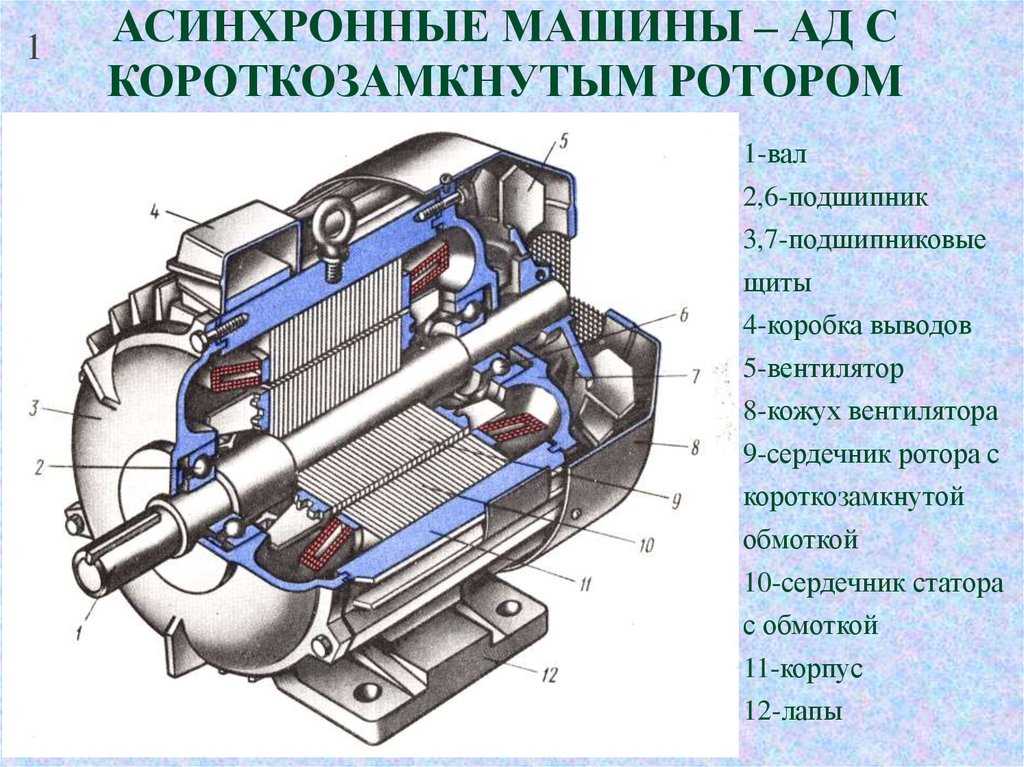 Одноплечий или двуплечий отвод — это еще один способ использования оптического отвода в качестве оптического концентратора. Существует множество турникетов, но наиболее универсальной моделью является Sirio, который особенно подходит для современных условий благодаря его вневременной дизайн. Некоторые из них более эффективны, другие имеют более высокий уровень безопасности, в то время как другие помогают с точной защитой заднего прохода и контрейлерной защиты. Для некоторых моделей оптических турникетов также доступны модификации, которые могут продлить срок службы ваших оптических турникетов. Турникеты прошли долгий путь с момента их использования в первом тысячелетии. Сегодня вы можете выбирать из множества концентраторов от оптических систем до шлагбаумов полного хранения. С другой стороны, когда физические барьеры становятся серьезной проблемой безопасности, требуется быстрая эвакуация, требующая аварийных выходов для обхода турникета. Когда вы вернетесь в офис, рассмотрите возможность установки высокоэффективных воздушных фильтров и более совершенных систем вентиляции и кондиционирования для снижения вирусной нагрузки.
Одноплечий или двуплечий отвод — это еще один способ использования оптического отвода в качестве оптического концентратора. Существует множество турникетов, но наиболее универсальной моделью является Sirio, который особенно подходит для современных условий благодаря его вневременной дизайн. Некоторые из них более эффективны, другие имеют более высокий уровень безопасности, в то время как другие помогают с точной защитой заднего прохода и контрейлерной защиты. Для некоторых моделей оптических турникетов также доступны модификации, которые могут продлить срок службы ваших оптических турникетов. Турникеты прошли долгий путь с момента их использования в первом тысячелетии. Сегодня вы можете выбирать из множества концентраторов от оптических систем до шлагбаумов полного хранения. С другой стороны, когда физические барьеры становятся серьезной проблемой безопасности, требуется быстрая эвакуация, требующая аварийных выходов для обхода турникета. Когда вы вернетесь в офис, рассмотрите возможность установки высокоэффективных воздушных фильтров и более совершенных систем вентиляции и кондиционирования для снижения вирусной нагрузки. внутри рабочего места. В условиях глобальной пандемии и ежегодного сезона гриппа важно начать ежедневно чистить сотни тысяч ручек у своего подъезда. Хотя можно чистить и дезинфицировать турникеты и вращающиеся двери безопасности на полную высоту, это не должно занимать первое место в вашем списке. Автоматические ворота обеспечивают стильный и функциональный доступ к вашей собственности, но, как и большинство механических вещей, они требуют определенного уровня обслуживания. работает правильно. Самый простой и эффективный вид ухода за дверью – раз в год тщательно чистить двери и, при необходимости, проводить мелкую чистку. Например, если вы будете мыть и выращивать свои двери каждый год, они будут хорошо выглядеть в течение долгого времени, помогут сохранить краску и предотвратят появление ржавчины.
внутри рабочего места. В условиях глобальной пандемии и ежегодного сезона гриппа важно начать ежедневно чистить сотни тысяч ручек у своего подъезда. Хотя можно чистить и дезинфицировать турникеты и вращающиеся двери безопасности на полную высоту, это не должно занимать первое место в вашем списке. Автоматические ворота обеспечивают стильный и функциональный доступ к вашей собственности, но, как и большинство механических вещей, они требуют определенного уровня обслуживания. работает правильно. Самый простой и эффективный вид ухода за дверью – раз в год тщательно чистить двери и, при необходимости, проводить мелкую чистку. Например, если вы будете мыть и выращивать свои двери каждый год, они будут хорошо выглядеть в течение долгого времени, помогут сохранить краску и предотвратят появление ржавчины.
Важные моменты, которые следует учитывать перед покупкой полноростовых турникетов
Турникеты являются неотъемлемой частью системы контроля доступа и безопасности общественного транспорта в общественных местах.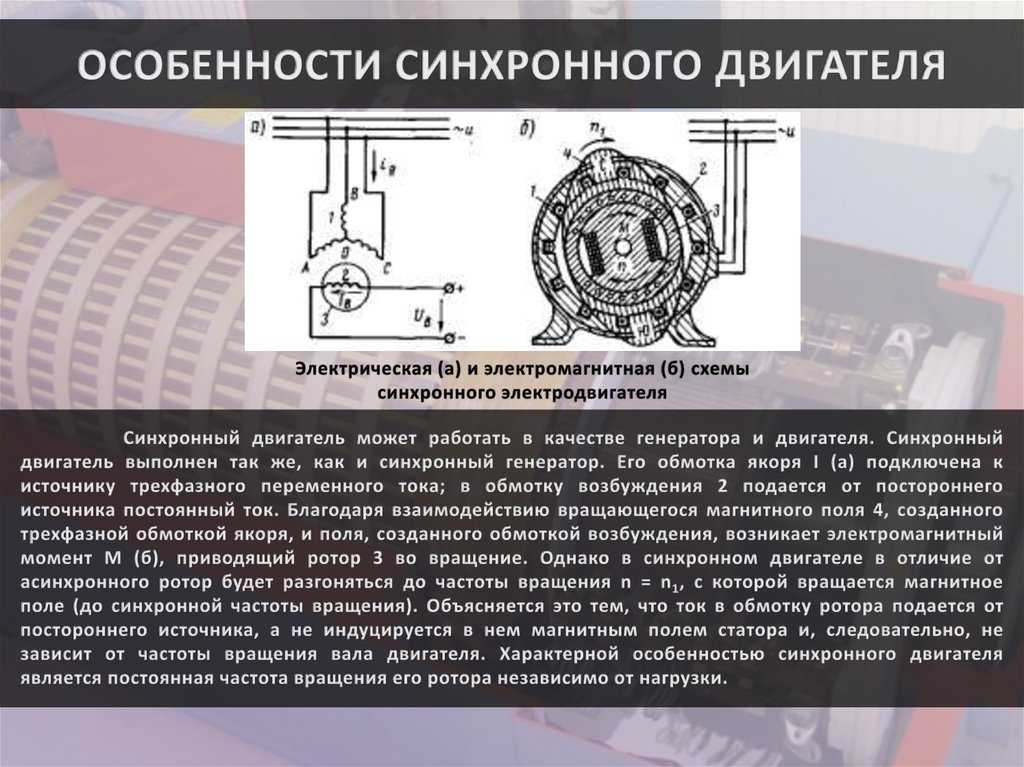 Поскольку пешеходные ворота используются для прохода людей, сама система должна быть безопасной. Другим фактором, который следует учитывать, является блокировка турникета для входа и выхода. Полноростовые турникеты обеспечивают более высокий уровень безопасности и предотвращают возможные проблемы, предотвращая или запрещая людям и материалам входить в охраняемые помещения. Установка полноростового турникета требует тщательного рассмотрения нескольких факторов, чтобы убедиться, что установлена правильная система контроля доступа. Ваши полноростовые турникеты должны быть в состоянии интегрироваться с существующей системой контроля доступа, чтобы обеспечить широкий спектр учетных данных и считывателей доступа. Например, они должны иметь возможность вместе со своими камерами наблюдения и пожарными датчиками предупреждать соответствующие органы, когда они подсчитывают шаги на турникетной полосе. Вы также должны иметь возможность учитывать количество входов и методы ввода, обслуживаемые картами, клавиатурами и биометрическими системами ввода. Необходимо предусмотреть прозрачные турникеты из поликарбоната для максимального пропуска людей, входящих на ваш объект, и полной видимости для всех участников и вашего персонала службы безопасности. . Турникеты для инвалидных колясок: Безопасный доступ часто требуется для пользователей в инвалидных креслах или других лиц, и мы предлагаем полный спектр турникетов для инвалидных колясок на полной высоте. Используя те же методы управления, что и другие модели, увеличение полной ширины турникетов для инвалидных колясок позволяет более легкий доступ для пользователей инвалидных колясок, обеспечивая при этом полный доступ для пешеходов. Популярные узлы контроля доступа для пешеходов, такие как EDAM, позволяют точно подсчитывать и контролировать доступ с помощью широкого спектра методов контроля. Турникеты также могут быть расширены функциями обнаружения, чтобы обнаруживать и сообщать о таких случаях, как сидение сзади, праздношатание и принудительный проход. Когда проход проходит, турникет информирует систему контроля доступа о том, что проход имел место. Когда пользователь предоставляет учетные данные, система управления сообщает стилю поворота, что не все учетные данные действительны и проход запрещен. Несанкционированные попытки входа вызывают тревогу, которая уведомляет пользователя и предупреждает центр управления конфликтами. Система контроля доступа контролирует вход и выход считывателя идентификационных карт ID3M RFID, расположенного на полной высоте сбоку от турникета с A3M. При срабатывании сигнализации на турникетах система и системы контроля доступа работают синхронно, оповещая охрану, включая камеры поблизости и блокируя соответствующие турникеты и второстепенные двери. Если представлены неверные учетные данные, система контроля доступа сигнализирует турникету, что учетные данные пользователя не будут приняты. Турникеты-платформы представляют собой самоподдерживающиеся портальные установки, поэтому нет необходимости устанавливать решение для доступа. Все настроено для работы либо в автономном режиме, либо в подключенном режиме с программным обеспечением для контроля доступа. По словам г-на Бруно из ITEC, барьеры турникетов часто невозможно снять без присутствия человека, а системой можно управлять без авторизации, не только для удостоверений личности, RFID-карт, отпечатков пальцев или билетов для распознавания лиц, в зависимости от потребностей клиента и типа проекта. Почтовые рельсовые системы могут использоваться для заполнения промежутков, где непрерывная линия турникетов нежелательна или где возникает требуемый объем трафика. Наше устройство сочетает в себе полноценный шлюз ADA, доступный в модели, совместимой с ADA, обеспечивая гибкую сквозную полосу для всех виды трафика. У нас есть несколько устройств, которые адаптированы к вашим потребностям, и огромный опыт в этой конкретной области. Доступные модели варьируются от простых моделей механических оптических регистраторов, которые измеряют трафик, до более сложных моделей сканирования штрих-кода. Проходные системы наших охранных и охранных компаний работают как в одном, так и в двух направлениях и предлагают несколько способов контроля входа и выхода с территории. Для входа в качественные офисные здания используется турникетный считыватель карт, который является одним из самых популярных турникеты и кардридеры, так как очень популярны в офисных зданиях благодаря стильному внешнему виду и надежному быстродействию. Фактически, производство этого устройства осуществляется в строгом производственном процессе и производится из нержавеющей стали 304 или 316 в соответствии со спецификациями; он восхитительно пыленепроницаемый, нержавеющий и не подвержен коррозии; безопасно и надежно; с качающимися стержнями; он предлагает стандартный электрический интерфейс для различных случаев распознавания, ввода в эксплуатацию, поставки и стандартизированных требований расширения. С улучшением современных людей и требований безопасности прозрачные акриловые турникеты все чаще используются для их безопасности и удобства. Использование ворот для пешеходов в зданиях, на строительных площадках, на вокзалах, в муниципалитетах, университетах и других случаях подчеркивает преимущества этих ворот. . Для контроля доступа и ворот требуются разные сценарии входа и выхода и разные типы устройств доступа (см. ниже). Ворота для пешеходов стали основной тенденцией в секторе безопасности. Никогда еще не было так важно контролировать вход и выход пешеходов в здания и из зданий, на открытые площадки и на мероприятия. Защита турникета зависит от физической среды, материала, из которого он изготовлен, и от того, имеет ли он покрытие для дальнейшего использования. защита. Функциональность турникетов также является определяющим фактором коэффициента перемещения устройства. Если тормозное усилие на пешеходов в переходе недостаточно сильное, это может привести к травмам людей. Еще один фактор, который следует учитывать, по словам Андре Россоу, управляющего директора компании Boomgate Systems, известной своими высококачественными турникетами и автомобильными ограждениями, — это качество гарантии и простота использования, которые предлагает продукт. Turnstars, директор компании, производящей полноразмерные турникеты и наши автоматизированные высокоскоростные автомобильные шлагбаумы, добавил, что важно снабдить изделие системой резервного питания от аккумуляторов, чтобы обеспечить бесперебойную работу в случае перебоев в электроснабжении.
Поскольку пешеходные ворота используются для прохода людей, сама система должна быть безопасной. Другим фактором, который следует учитывать, является блокировка турникета для входа и выхода. Полноростовые турникеты обеспечивают более высокий уровень безопасности и предотвращают возможные проблемы, предотвращая или запрещая людям и материалам входить в охраняемые помещения. Установка полноростового турникета требует тщательного рассмотрения нескольких факторов, чтобы убедиться, что установлена правильная система контроля доступа. Ваши полноростовые турникеты должны быть в состоянии интегрироваться с существующей системой контроля доступа, чтобы обеспечить широкий спектр учетных данных и считывателей доступа. Например, они должны иметь возможность вместе со своими камерами наблюдения и пожарными датчиками предупреждать соответствующие органы, когда они подсчитывают шаги на турникетной полосе. Вы также должны иметь возможность учитывать количество входов и методы ввода, обслуживаемые картами, клавиатурами и биометрическими системами ввода. Необходимо предусмотреть прозрачные турникеты из поликарбоната для максимального пропуска людей, входящих на ваш объект, и полной видимости для всех участников и вашего персонала службы безопасности. . Турникеты для инвалидных колясок: Безопасный доступ часто требуется для пользователей в инвалидных креслах или других лиц, и мы предлагаем полный спектр турникетов для инвалидных колясок на полной высоте. Используя те же методы управления, что и другие модели, увеличение полной ширины турникетов для инвалидных колясок позволяет более легкий доступ для пользователей инвалидных колясок, обеспечивая при этом полный доступ для пешеходов. Популярные узлы контроля доступа для пешеходов, такие как EDAM, позволяют точно подсчитывать и контролировать доступ с помощью широкого спектра методов контроля. Турникеты также могут быть расширены функциями обнаружения, чтобы обнаруживать и сообщать о таких случаях, как сидение сзади, праздношатание и принудительный проход. Когда проход проходит, турникет информирует систему контроля доступа о том, что проход имел место. Когда пользователь предоставляет учетные данные, система управления сообщает стилю поворота, что не все учетные данные действительны и проход запрещен. Несанкционированные попытки входа вызывают тревогу, которая уведомляет пользователя и предупреждает центр управления конфликтами. Система контроля доступа контролирует вход и выход считывателя идентификационных карт ID3M RFID, расположенного на полной высоте сбоку от турникета с A3M. При срабатывании сигнализации на турникетах система и системы контроля доступа работают синхронно, оповещая охрану, включая камеры поблизости и блокируя соответствующие турникеты и второстепенные двери. Если представлены неверные учетные данные, система контроля доступа сигнализирует турникету, что учетные данные пользователя не будут приняты. Турникеты-платформы представляют собой самоподдерживающиеся портальные установки, поэтому нет необходимости устанавливать решение для доступа. Все настроено для работы либо в автономном режиме, либо в подключенном режиме с программным обеспечением для контроля доступа. По словам г-на Бруно из ITEC, барьеры турникетов часто невозможно снять без присутствия человека, а системой можно управлять без авторизации, не только для удостоверений личности, RFID-карт, отпечатков пальцев или билетов для распознавания лиц, в зависимости от потребностей клиента и типа проекта. Почтовые рельсовые системы могут использоваться для заполнения промежутков, где непрерывная линия турникетов нежелательна или где возникает требуемый объем трафика. Наше устройство сочетает в себе полноценный шлюз ADA, доступный в модели, совместимой с ADA, обеспечивая гибкую сквозную полосу для всех виды трафика. У нас есть несколько устройств, которые адаптированы к вашим потребностям, и огромный опыт в этой конкретной области. Доступные модели варьируются от простых моделей механических оптических регистраторов, которые измеряют трафик, до более сложных моделей сканирования штрих-кода. Проходные системы наших охранных и охранных компаний работают как в одном, так и в двух направлениях и предлагают несколько способов контроля входа и выхода с территории. Для входа в качественные офисные здания используется турникетный считыватель карт, который является одним из самых популярных турникеты и кардридеры, так как очень популярны в офисных зданиях благодаря стильному внешнему виду и надежному быстродействию. Фактически, производство этого устройства осуществляется в строгом производственном процессе и производится из нержавеющей стали 304 или 316 в соответствии со спецификациями; он восхитительно пыленепроницаемый, нержавеющий и не подвержен коррозии; безопасно и надежно; с качающимися стержнями; он предлагает стандартный электрический интерфейс для различных случаев распознавания, ввода в эксплуатацию, поставки и стандартизированных требований расширения. С улучшением современных людей и требований безопасности прозрачные акриловые турникеты все чаще используются для их безопасности и удобства. Использование ворот для пешеходов в зданиях, на строительных площадках, на вокзалах, в муниципалитетах, университетах и других случаях подчеркивает преимущества этих ворот. . Для контроля доступа и ворот требуются разные сценарии входа и выхода и разные типы устройств доступа (см. ниже). Ворота для пешеходов стали основной тенденцией в секторе безопасности. Никогда еще не было так важно контролировать вход и выход пешеходов в здания и из зданий, на открытые площадки и на мероприятия. Защита турникета зависит от физической среды, материала, из которого он изготовлен, и от того, имеет ли он покрытие для дальнейшего использования. защита. Функциональность турникетов также является определяющим фактором коэффициента перемещения устройства. Если тормозное усилие на пешеходов в переходе недостаточно сильное, это может привести к травмам людей. Еще один фактор, который следует учитывать, по словам Андре Россоу, управляющего директора компании Boomgate Systems, известной своими высококачественными турникетами и автомобильными ограждениями, — это качество гарантии и простота использования, которые предлагает продукт. Turnstars, директор компании, производящей полноразмерные турникеты и наши автоматизированные высокоскоростные автомобильные шлагбаумы, добавил, что важно снабдить изделие системой резервного питания от аккумуляторов, чтобы обеспечить бесперебойную работу в случае перебоев в электроснабжении.
нет данных
Оставить сообщение
Длина ввода
не должна превышать 200!
имяПожалуйста, введите действительный адрес электронной почты!
Эл. адресТекстовое поле
не должно превышать 65530 в длину!
содержаниепоследние продукты
Продукты Распознавание лица Горячие продукты
Полностью автоматизированная система управления парковкой TGW Универсальное интеллектуальное решение для парковки
Ультразвуковой датчик парковки для крытой парковки
8-дюймовый ультратонкий терминал определения температуры тела с распознаванием лиц
Управление пропусками Вертикальный модуль измерения температуры и распознавания лиц
TGW-FH001D Двойные ворота барьеров прохода RFID Полноростовые ворота турникета
нет данных
В чем разница между двигателем переменного тока и двигателем постоянного тока?
Электричество и магнетизм
Существует два типа электродвигателей: двигатели переменного тока и двигатели постоянного тока. Основное различие между двигателем переменного тока и двигателем постоянного тока заключается в том, что двигатель переменного тока питается от переменного тока, а двигатель постоянного тока питается от постоянного тока. Чтобы подробно узнать о двигателях переменного и постоянного тока, ниже приведена сравнительная таблица о разнице между двигателями переменного и постоянного тока.
Сейчас!
Мы узнаем больше о двигателе переменного тока и двигателе постоянного тока.
Что такое двигатель переменного тока?
Статор двигателя переменного тока имеет катушки, на которые подается переменный ток и создается вращающееся магнитное поле. Ротор двигателя переменного тока вращается внутри катушек электродвигателя и прикреплен к выходному валу, который создает крутящий момент за счет вращающегося магнитного поля.
Как работает двигатель переменного тока?
Существует два типа двигателей переменного тока. Синхронные двигатели и асинхронные двигатели.
Синхронный двигатель состоит из ротора, который питается от источника постоянного тока. Статор имеет трехфазную обмотку, от которой может подаваться питание. Теперь, когда эти два источника питания подаются, то есть при определенных напряжениях, потребляется ток, и катушка внутри создает магнитные поля. Когда вращающееся поле переменного тока (хотя статор не вращается, трехфазное поле дает эффект вращения) и поле постоянного тока взаимодействуют, создается крутящий момент, который приводит к вращению.
Асинхронный или асинхронный двигатель отличается только одной деталью. У него нет отдельного поля постоянного тока. Вместо этого ротор вращается под действием индуктивности или передачи потока. Ротор будет пытаться следовать за трехфазным потоком в статоре и, следовательно, за ротором. Этот двигатель используется в вентиляторах.
Какие бывают двигатели переменного тока?
Существует два основных типа двигателей переменного тока, и в каждом из них используется свой тип ротора.
- Синхронные двигатели
- Асинхронные двигатели или асинхронные двигатели
Синхронный двигатель может работать с точной частотой питания, поскольку он не реагирует на индукцию. Магнитное поле синхронного двигателя создается током, проходящим через контактные кольца. Синхронные двигатели работают быстрее, чем асинхронные, потому что скорость уменьшается за счет скольжения асинхронного двигателя. Асинхронный двигатель использует магнитное поле на роторе асинхронного двигателя, которое создается индуцированным током.
Типы синхронных двигателей
- Плоские синхронные двигатели
- Суперсинхронные двигатели
Типы асинхронных двигателей
- Однофазные
- Трехфазные двигатели постоянного тока 9 типов
3?
Существует два типа двигателей постоянного тока.
- Коллекторные двигатели постоянного тока
- Бесщеточные двигатели постоянного тока
Типы щеточных двигателей постоянного тока
- Шунтовая обмотка
- Комбинированная обмотка
- Постоянный магнит
- Серийная обмотка
Вывод:
В двигателях переменного и постоянного тока используется один и тот же принцип использования обмотки якоря и магнитного поля, за исключением двигателей постоянного тока. В двигателях переменного тока якорь не вращается, а магнитное поле постоянно вращается.
В некоторых приложениях двигатели постоянного тока заменяются путем объединения двигателя переменного тока с электронным регулятором скорости.
Двигатели постоянного тока заменяются двигателем переменного тока и электронным регулятором скорости, поскольку это более экономичное и менее дорогое решение.Двигатели постоянного тока имеют много движущихся частей, замена которых обходится дорого, а ремонт электродвигателя постоянного тока обычно дороже, чем использование нового двигателя переменного тока с электронным контроллером.
Что касается технического обслуживания, двигатели переменного тока используются в основном из-за легкой доступности источника переменного тока. Двигатель постоянного тока имеет постоянную проблему обслуживания.
Похожие темы
- Типы электродвигателей
Похожие статьи
Проверьте также
Закрыть
Конструкция и принцип действия асинхронного двигателя
Ротор с короткозамкнутым ротором и контактным кольцом
Асинхронный двигатель также называют асинхронным двигателем, поскольку асинхронные двигатели работают по принципу индукции.
Асинхронный двигатель укорочен с помощью ASM или IM. В моторном режиме ротор асинхронного двигателя вращается медленнее, чем магнитное вращающееся поле статора, то есть асинхронно со статором. Разница между скоростью вращения статора и скоростью вращения ротора также называется скольжением. Когда скорость ротора равна скорости статора, скольжение равно нулю и асинхронный двигатель не обеспечивает положительного крутящего момента. В генераторном режиме ротор вращается быстрее, чем вращающееся поле от статора. Разница скоростей создает отрицательный крутящий момент, который пытается замедлить ротор. Асинхронные двигатели, работающие напрямую от двухфазного переменного тока или трехфазного трехфазного тока без инвертора, имеют меньший КПД, чем синхронные двигатели с постоянными магнитами. Однако асинхронные двигатели, работающие с инвертором, могут достигать такого же высокого КПД.Конструкция асинхронного двигателя
Существует два различных типа асинхронных двигателей: с короткозамкнутым ротором и контактным кольцом.
Структура статора одинакова для обоих и аналогична структуре синхронного двигателя. Для проведения магнитного потока в электродвигателе статор и ротор состоят из нескольких слоев электротехнического листа, толщина которого обычно составляет 0,5 мм. Чем тоньше выполнен электротехнический лист, тем меньше потери на вихревые токи в электродвигателе и выше его КПД. Статор несет обмотки, по которым протекает трехфазный ток. Обычно статор имеет три фазы двигателя, которые можно соединить звездой или треугольником. Однако есть двигатели и с большим, и с меньшим количеством фаз, что зависит в первую очередь от предполагаемого использования и напряжения питания. Ротор содержит короткозамкнутые токопроводящие стержни или обмотки в зависимости от типа асинхронного двигателя.Воспроизвести видео о работе асинхронного двигателя video
Асинхронный двигатель с короткозамкнутым ротором
Ротор АД с короткозамкнутым ротором состоит из клетки из стержней, изготовленных из алюминия или меди.
Стержни закорочены на верхнем и нижнем концах кольцами из того же материала. Чаще всего используется ротор с короткозамкнутым ротором, поскольку он не имеет контактных колец и, следовательно, имеет более длительный срок службы. Кроме того, производство ротора намного дешевле.Асинхронный двигатель с ротором с контактными кольцами
Ротор с контактными кольцами состоит из обмоток вместо стержней. Обмотки не закорочены в роторе, а выведены наружу через токосъемные кольца и закорочены через дополнительные резисторы. Протекание тока в роторе можно контролировать с помощью резисторов снаружи электродвигателя.
Функция асинхронного двигателя
Вращающееся магнитное поле создается трехфазным током в обмотках статора. Вращающееся магнитное поле от статора также проходит через воздушный зазор через ротор. Если существует разница скоростей между скоростью вращения ротора и скоростью вращения статора, в токопроводящих стержнях ротора вращающимся магнитным полем индуцируется напряжение.
Поскольку стержни проводника закорочены друг на друга на нижнем и верхнем концах, индуцированное напряжение генерирует ток в стержнях. Ток короткого замыкания в стержнях сам по себе создает магнитное поле в роторе, которое следует за магнитным полем статора. В отличие от синхронных двигателей с постоянными магнитами магнитное поле ротора не стационарно, а вращается поперек ротора. Когда ротор вращается с той же скоростью, что и статор, в токопроводящих стержнях больше не индуцируется ток и, следовательно, больше не создается крутящий момент. В случае короткого замыкания статора ротор больше не индуцирует напряжение. Это делает асинхронный двигатель очень безопасным электродвигателем, и именно поэтому крупные производители автомобилей, такие как Tesla и Audi, например, используют асинхронный двигатель в своих электромобилях.Преимущества и недостатки
Ознакомьтесь с преимуществами и недостатками асинхронных двигателей с ротором с контактными кольцами и короткозамкнутым ротором с инвертором и без него.
Ротор с контактными кольцами IM
Основным преимуществом асинхронного двигателя с контактными кольцами является более высокий крутящий момент в более низком диапазоне скоростей и более низкий пусковой ток. Однако дополнительные затраты на токосъемные кольца, а также на изготовление ротора с обмотками значительны. Поэтому сегодня ротор с контактными кольцами используется только для очень больших электродвигателей, где инвертор был бы слишком дорогим.
IM с короткозамкнутым ротором без инвертора
Основным преимуществом асинхронных двигателей с короткозамкнутым ротором являются низкие производственные затраты на ротор по сравнению с синхронным двигателем с постоянным магнитом и коротким СДПМ. Асинхронный двигатель очень устойчив к высоким температурам. Вам не нужно беспокоиться о размагничивании магнитов, как в случае с PMSM. Основным недостатком является низкий пусковой момент и низкий КПД, если не использовать инвертор.
Беличья клетка IM с инвертором
С инвертором асинхронный двигатель может достичь такого же высокого КПД, как и СДПМ на высоких скоростях.
Пиковая мощность и пиковый крутящий момент также очень хороши, так как вам не нужно беспокоиться о размагничивании магнитов. Непрерывная мощность может быть проблемой, если генерируемое тепло в роторе не может быть отведено должным образом.Синхронные двигатели ABB
Благодаря своему беспрецедентно высокому КПД синхронные двигатели будут играть ключевую роль в передаче энергии не только за счет снижения потерь, но и за счет своего вклада в такие приложения, как водород, хранение энергии и улавливание и хранение углерода (КСС). Они также могут оказывать стабилизирующее воздействие на электросеть с интенсивным использованием возобновляемых источников энергии благодаря своей способности производить реактивную мощность.
Ключевые преимущества
- Высокая надежность и эффективность
- Индивидуальный дизайн для приложения
- Снижает общую стоимость владения для клиента
- Предназначен для снижения воздействия на окружающую среду
- Глобальная сервисная сеть и экспертная поддержка в предметной области
- Заранее определенная программа обслуживания обеспечивает поддержку на протяжении всего жизненного цикла
Синхронные двигатели ABB, предложение
АББ является ведущим поставщиком синхронных двигателей и генераторов на рынке.
Во всем мире наши синхронные двигатели обеспечивают высокую производительность в промышленных процессах, в морской и оффшорной отраслях, коммунальных услугах и специализированных приложениях.Синхронные двигатели для судов
Синхронные двигатели АББ для морского применения оптимизированы для движения крейсеров и авианосцев. Доступны как обычные, так и пропульсивные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошие характеристики, высокую эффективность и надежность в различных типах морских установок. Двигатели в основном используются с приводами с регулируемой скоростью.
Синхронные двигатели для нефтегазовой промышленности
Синхронные двигатели АББ для нефтегазовой отрасли оптимизированы для насосов, вентиляторов, центробежных и поршневых компрессоров, используемых в нефтегазовой промышленности.
Доступны как низкоскоростные, так и высокоскоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошие характеристики, высокую эффективность и надежность в различных типах нефтегазовых установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.Синхронные двигатели для воды
Синхронные двигатели АББ для водного хозяйства оптимизированы для применения в насосах, что обычно означает квадратичную нагрузку и высокий крутящий момент при низкой или средней скорости. Проверенная конструкция обеспечивает чрезвычайно высокую производительность и надежность в различных типах насосных установок.
Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью. Они идеально сочетаются с приводами АББ, которые зарекомендовали себя во многих приложениях с превосходной производительностью.
Наши решения предназначены для того, чтобы помочь клиентам управлять рисками, связанными с безопасным водоснабжением, высокими затратами на энергию и нерентабельностью воды, которые являются результатом урбанизации, нехватки воды и утечек воды.
Синхронные двигатели и сервисные решения АББ обеспечат вам душевное спокойствие, повысив надежность и сэкономив ваши деньги в долгосрочной перспективе.
Синхронные двигатели для химических и воздухоразделительных установок
Синхронные двигатели АББ для химической промышленности и разделения воздуха оптимизированы для экструдеров, компрессоров и детандеров, используемых в химической промышленности. Доступны как низкоскоростные, так и высокоскоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошие характеристики, высокую эффективность и надежность в различных типах химических установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.
Синхронные двигатели для металлов
Синхронные двигатели АББ для металлургии оптимизированы для воздуходувок, насосов и мельниц, используемых в металлургической промышленности. Доступны как низкоскоростные, так и высокоскоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошую производительность, высокую эффективность и надежность в различных типах металлических установок.
В отрасли, которая характеризуется теплом, движением, импульсом и энергией, активы должны быть устойчивыми к самым изменчивым процессам и окружающей среде. АББ обладает масштабами, техническими ноу-хау и экспертными знаниями в своей области, чтобы быть вашим надежным партнером в металлургической промышленности и постоянно поддерживать вас в повышении энергоэффективности, надежности, производительности и безопасности
Как и наши синхронные двигатели для нефтяной и газовой промышленности, двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.
Синхронные двигатели для горнодобывающей промышленности
Синхронные двигатели АББ для горнодобывающей промышленности оптимизированы для мельниц, шахтных подъемников и конвейеров, используемых в горнодобывающей промышленности.
В отрасли, которая характеризуется суровыми условиями, удаленностью и энергоемкими приложениями, активы должны быть устойчивыми к самым суровым процессам и средам.
Компания АББ обладает масштабами, техническими ноу-хау и экспертными знаниями в своей области, чтобы быть вашим надежным партнером в горнодобывающей промышленности и постоянно поддерживать вас в повышении энергоэффективности, надежности, производительности и безопасности.Доступны как низкоскоростные, так и среднескоростные двигатели, а проверенная конструкция обеспечивает чрезвычайно хорошую производительность, высокую эффективность и надежность в различных типах горнодобывающих установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью.
Синхронные двигатели для целлюлозно-бумажной промышленности
Синхронные двигатели АББ для целлюлозно-бумажной промышленности оптимизированы для рафинерных и деревообрабатывающих заводов. Проверенная конструкция обеспечивает исключительно хорошую производительность, высокую эффективность и надежность на различных типах целлюлозно-бумажных предприятий.
Синхронные двигатели для других отраслей и применений
Синхронные двигатели общего назначения компании АББ оптимизированы для обеспечения высокой надежности и эффективности.
Доступны как низкоскоростные, так и высокоскоростные двигатели, и конструкция обеспечивает чрезвычайно хорошие характеристики в различных типах установок. Двигатели подключаются напрямую или питаются от приводов с регулируемой скоростью. Обзор двигателя переменного тока и технические характеристики двигателя переменного тока
Если вы ищете исчерпывающую информацию о двигателях переменного тока, вы попали в нужное место. Заказные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой. В этом типе двигателя первичная обмотка, или статор, подключается к источнику питания, в то время как короткозамкнутый вторичный элемент, или ротор, несет индуцированный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент.
С другой стороны, асинхронный двигатель относится к отдельному классу двигателей переменного тока из-за различий в конструкции и рабочих характеристиках. Sinotech предлагает надежный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, которые могут быть адаптированы к вашим точным спецификациям.Узнайте последние новости о двигателях переменного тока в нашем блоге.
Асинхронные и синхронные двигатели переменного тока
Обзор асинхронных двигателей переменного тока
Асинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными двигателями. Как одни из самых простых и надежных электродвигателей, асинхронные двигатели переменного тока имеют две основные электрические сборки: статор с обмоткой и узел ротора. Двигатель получил свое название от токов, втекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для создания вращения.
Электродвигатели переменного тока, в том числе асинхронные двигатели переменного тока, имеют роторы с пластинчатыми цилиндрическими железными сердечниками с прорезями для приема проводников. Наиболее распространенный тип ротора, производимого производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и короткозамыкающие торцевые кольца. Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость, с которой вращается магнитное поле, называется синхронной скоростью (n с ). Эта скорость определяется количеством полюсов статора и частотой источника питания. Формула для расчета синхронной скорости двигателя переменного тока: n с = 120f/p.
- n с: синхронная скорость в об/мин
- f: частота сетевого напряжения в Гц
- p: количество полюсов
Синхронная скорость — это абсолютный верхний предел скорости двигателя переменного тока.
Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не пересекают силовые линии и не создают крутящего момента.При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы вызвать надлежащее количество тока, протекающего через ротор, чтобы результирующий крутящий момент был достаточным для управления нагрузкой и преодоления потерь на аэродинамическое сопротивление и трение.
Разница скоростей между ротором двигателя переменного тока и магнитным полем называется «скольжением». Скольжение — это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s – n а )/n с .
- с = проскальзывание
- n с = синхронная скорость
- n a = фактическая скорость
Синхронные двигатели Обзор
Синхронные двигатели имеют особую конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора.
Другими словами, они работают в абсолютной синхронизации с частотой сети. К основным типам синхронных двигателей относятся двигатели без возбуждения и двигатели с возбуждением от постоянного тока. Подобно асинхронным двигателям переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частоты линии.Производители электродвигателей на заказ проектируют синхронные электродвигатели различных типоразмеров, от субдробных двигателей с автовозбуждением до мощных двигателей переменного тока с возбуждением постоянного тока для промышленных приводов. В диапазоне долей мощности синхронные двигатели обеспечивают точную постоянную скорость.
При применении к промышленным нагрузкам синхронные двигатели большой мощности выполняют две важные функции:
- Обеспечивают высокоэффективное преобразование энергии переменного тока в механическую
- Работа с опережающим или единичным коэффициентом мощности, что обеспечивает коррекцию коэффициента мощности
Синхронные электродвигатели без возбуждения
Производители двигателей переменного тока создают электродвигатели без возбуждения, используя конструкции с реактивным сопротивлением и гистерезисом.
Они используют схему самозапуска и не требуют внешнего источника возбуждения.Синхронные электродвигатели с возбуждением от постоянного тока
Электродвигатели с возбуждением от постоянного тока доступны в размерах более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в движение или их ротор должен быть подключен в виде цепи самозапуска для запуска. Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет войти в синхронизм. Разгон с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, важно использовать отдельные средства для начала.
В самозапускающихся электродвигателях переменного тока, изготовленных по индивидуальному заказу, типоразмера fhp используются методы пуска, общие для асинхронных электродвигателей, такие как расщепленная фаза, пуск с конденсатором, пуск с отталкиванием и пуск с экранированными полюсами.
Двигатели автоматически переключаются в синхронный режим из-за электрических характеристик.В двигателях с возбуждением от постоянного тока для запуска используется короткозамкнутая обмотка, называемая амортизирующей или демпферной обмоткой. Между прочим, низкий пусковой момент двигателя и потребность в источнике питания постоянного тока требуют пусковой системы, которая:
- Обеспечивает полную защиту электродвигателя при пуске
- Применяет возбуждение поля постоянного тока в нужное время
- Удаляет возбуждение поля при вытягивании ротора (максимальный крутящий момент)
- Защищает короткозамкнутую обмотку электродвигателя от теплового повреждения при асинхронном режиме
A Взгляд на крутящий момент в электродвигателях с возбуждением постоянным током
Тяговый крутящий момент
Тяговый крутящий момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки тяги.
Этот крутящий момент должен превышать крутящий момент нагрузки настолько, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.Момент реактивного сопротивления
Момент реактивного сопротивления двигателя является результатом заметности полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронных.
Момент сопротивления влияет на моменты втягивания и вытягивания двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем статора электродвигателя для поддержания минимального магнитного сопротивления. Сопротивления электродвигателя может быть достаточно, чтобы привести малонагруженную малоинерционную систему в синхронизм и развить тяговый момент примерно в 30 процентов.
Синхронный крутящий момент
Синхронный крутящий момент электродвигателя — это крутящий момент, создаваемый после приложения возбуждения.
Он представляет собой общий стационарный крутящий момент, доступный для управления нагрузкой. Крутящий момент достигает максимума при отставании ротора примерно на 70° от вращающегося магнитного поля статора. Однако максимальным значением является момент отрыва.Момент отрыва
Момент отрыва — это максимальный устойчивый момент, который электродвигатель развивает на синхронной скорости в течение одной минуты при номинальной частоте и нормальном возбуждении. Нормальный момент отрыва обычно составляет 150 процентов от момента полной нагрузки для электродвигателей с единичным коэффициентом мощности. Это от 175 до 200 процентов для электродвигателей с ведущим коэффициентом мощности 0,8.
Втягивающий момент
Втягивающий момент синхронного двигателя — это крутящий момент, развиваемый при втягивании подключенной инерционной нагрузки в синхронизм при приложении возбуждения. Он развивается при переходе от скорости проскальзывания к синхронной скорости, когда электродвигатели переходят с асинхронного режима работы на синхронный.
Это, как правило, самый критический период при запуске синхронного двигателя. При синхронной скорости момент, развиваемый амортизирующей и обмотками возбуждения, становится равным нулю. В результате в точке втягивания действуют только сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмотки возбуждения.Дополнительные типы двигателей переменного тока по заказу
Многофазные двигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, такие как трехфазные двигатели, представляют собой машины с постоянной скоростью. Они имеют некоторую степень гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости полной нагрузки. Стандартизация и инновации позволили создать четыре основных типа двигателей переменного тока:
Исполнения A и B Характеристики
- Двигатель переменного тока общего назначения с нормальными пусковыми моментами и токами, а также малым скольжением
- Двигатели переменного тока фракционного многофазного тока, как правило, конструкции B
- Поскольку конструкция B имеет падающие характеристики, многофазный двигатель переменного тока с таким же аварийным или максимальным крутящим моментом, как у однофазного двигателя переменного тока, не может достичь той же точки скорости-момента для скорости с полной нагрузкой, что и однофазный пользовательский двигатель переменного тока. конструкции двигателя
- Опрокидывающий крутящий момент должен быть выше для сопоставимых скоростей при полной нагрузке (минимум 140 % опрокидывающего крутящего момента однофазных двигателей переменного тока общего назначения)
Исполнение C Характеристики
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется там, где пусковые нагрузки высоки при пуске, но обычно работают при номинальной полной нагрузке
- Не требует высоких перегрузок после достижения рабочей скорости
Конструкция D Характеристики
- Высокое скольжение, позволяющее снижать скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая скорость полной нагрузки
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются по проскальзыванию или форме кривой скорость-момент
Конструкция F Характеристики
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Производители двигателей на заказ изготавливают двигатели переменного тока для получения низкого тока при заторможенном роторе
- Заблокированный ротор и низкий крутящий момент
- Двигатели обычно используются, когда пусковой момент низкий и высокие перегрузки не возникают после достижения рабочей скорости
Двигатели переменного тока с фазным ротором
Двигатели переменного тока с короткозамкнутым ротором относительно негибкие в отношении характеристик скорости и крутящего момента.
Однако специальный двигатель переменного тока с фазным ротором имеет регулируемую скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Получение рабочих характеристик двигателя переменного тока заключается в введении различных значений сопротивления в цепь ротора.Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно уменьшается, чтобы позволить двигателю набрать скорость. В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Производители двигателей переменного тока могут проектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, приводящую к большим падениям скорости вращения при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50 процентов от номинальной скорости, но эффективность остается низкой.
Многоскоростные двигатели переменного тока
Производители двигателей на заказ конструируют двигатели переменного тока с последовательной последовательностью полюсов для работы на одной скорости. Физически переподключив провода, можно добиться соотношения скоростей 2:1. Типичные скорости для двигателей переменного тока 60 Гц:
- 3600/1800 об/мин (2/4 полюса)
- 1800/900 об/мин (4/8 полюсов)
- 1200/600 об/мин (6/12 полюсов)
Двигатели переменного тока с двумя обмотками имеют две отдельные обмотки, которые производители могут наматывать для любого числа полюсов, чтобы облегчить получение других соотношений скоростей. Однако соотношение больше 1:4 нецелесообразно из-за размера и веса двигателя переменного тока.
Однофазные двигатели переменного тока обычно имеют конструкцию с переменным крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью в лошадиных силах.Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции двигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих характеристик нагрузки:
- Переменная крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-момент, которые зависят от квадрата скорости. Например, электродвигатель с частотой вращения 1800/900 об/мин, развивающий мощность 10 л.с. при 1800 об/мин, производит 2,5 л.с. при 900 об/мин. Поскольку двигатели переменного тока сталкиваются с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требуемый крутящий момент зависит от квадрата или куба скорости. Эта характеристика двигателя в целом достаточна.
- Постоянный крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об/мин производит 5 л.с. при 900 об/мин. Вы найдете эти двигатели в приложениях с требованиями постоянного крутящего момента, таких как смесители, конвейеры и компрессоры.
- Константа лошадиных сил : Эти двигатели переменного тока развивают одинаковую мощность на каждой скорости. Крутящий момент обратно пропорционален скорости. Применение таких двигателей переменного тока включает станки, в том числе дрели, фрезерные станки и токарные станки.
Однофазные двигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность. Однако однофазная интегральная мощность доступна в более низком диапазоне мощности.
Наиболее распространенными однофазными двигателями переменного тока с дробной мощностью являются:- Двухфазные
- Интеллектуальный конденсатор
- Постоянный разъемный конденсатор
- Заштрихованный столб
Этот нестандартный двигатель переменного тока доступен в многоскоростном исполнении, но существуют практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Методы последовательного полюса или двухобмоточные методы могут сопровождать выбор скорости.
Универсальные двигатели
Универсальные двигатели
Универсальные двигатели работают практически с одинаковыми характеристиками при постоянном или переменном токе частотой до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими металлическими пластинами. Двигатели постоянного тока могут работать от переменного тока, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателей переменного тока.
Однако у них хуже коммутация и срок службы щеток по сравнению с эквивалентным двигателем постоянного тока. Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое отношение мощности к фунту среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.При работе без нагрузки универсальные двигатели склонны к разгону. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На переносных инструментах, таких как электрические пилы, нагрузка, создаваемая шестернями, подшипниками и охлаждающим вентилятором, достаточна для удержания скорости холостого хода на безопасном уровне.
С универсальным двигателем управление скоростью осуществляется просто, поскольку скорость электродвигателя чувствительна к изменениям напряжения и потока.
Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной скорости до нуля.Электродвигатели с синхронизацией
Электродвигатели с синхронизацией имеют номинальную мощность менее 1/10 л.с. и используются в качестве первичных двигателей для устройств синхронизации. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигатели переменного и постоянного тока могут использоваться в качестве синхронизирующих двигателей. Электрические синхронизирующие двигатели постоянного тока используются в портативных устройствах или когда требуется высокое ускорение и низкие изменения скорости. Хотя требуется какая-то форма механического или электрического регулятора скорости, такие электродвигатели обладают рядом преимуществ, в том числе:
- Эффективность от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно простое регулирование скорости
Серводвигатели переменного тока
Серводвигатели используются в сервомеханизмах переменного тока и компьютерах, требующих быстрого и точного отклика.
Для получения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрых пусков, остановок и реверсов. Высокое сопротивление обеспечивает почти линейное соотношение скорости и крутящего момента для точного управления.Серводвигатели ветра, изготовленные по индивидуальному заказу, с двумя фазами, физически расположенными под прямым углом или квадратурой в пространстве. Двигатели имеют фиксированную или эталонную обмотку, которая возбуждается от источника постоянного напряжения. Обмотка управления возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя. Инженеры проектируют обмотки серводвигателей с одинаковым отношением напряжения к витку, чтобы входная мощность при максимальном возбуждении с фиксированной фазой и максимальном сигнале фазы управления были сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению на управляющей обмотке двигателя.