
Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
Главная » Полезные статьи » Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
30.07.2020
Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
Асинхронные и синхронные электродвигатели имеют принципиальные отличия, которые во многом определяют сферу эксплуатации. Разница в конструкции позволяет в отдельных случаях более эффективно выполнять поставленные задачи на промышленных объектах. Наибольшее распространение получили асинхронные электродвигатели, но иногда выгоднее использовать синхронные аналоги.
Особенности строения и работы синхронных двигателей
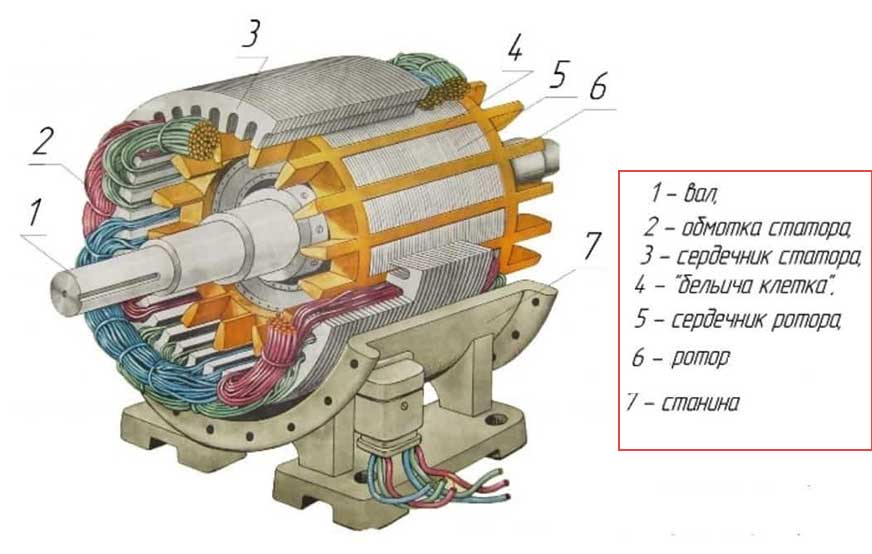
Внешне оба вида электрических двигателей очень похожи, но есть существенные различия в строении роторов. Эти элементы в случае с асинхронными устройствами не питаются электрическим током. При работе вращающееся магнитное поле образуется за счет МДС обмоток статора.
При работе вращающееся магнитное поле образуется за счет МДС обмоток статора.
Ротор синхронных электродвигателей обладает обмоткой с автономным питанием. Статоры имеют идентичную конструкцию. Основная задача этих элементов заключается в формировании вращающегося магнитного поля во время работы.
Важно знать, что обороты синхронного двигателя совпадают по частоте магнитного поля, которое создает статор. Совершенно другая ситуация в случае с асинхронными электродвигателями. При работе под нагрузкой есть отставание от вращения магнитного поля непосредственно на величину скольжения. По этой причине выгоднее делать выбор в пользу синхронного двигателя, если требуется обеспечивать постоянные обороты при разных нагрузках.
Особенности строения и работы асинхронного двигателя
Сфера эксплуатации асинхронных электродвигателей в целом очень широка. Их активно применяют в различном оборудовании, где отмечается относительно равномерная нагрузка, а уменьшение оборотов не так существенно влияет на рабочий процесс. Такими двигателями оснащают станки, насосы, транспортеры и другие электрические установки.
Такими двигателями оснащают станки, насосы, транспортеры и другие электрические установки.
Однако есть компрессоры и насосы, которые требуют поддержания определенной частоты оборотов при изменяющейся нагрузке, на них устанавливают синхронные двигатели.
Сравнение и преимущества асинхронных электродвигателей
Синхронные электродвигатели устанавливают в электроприводах, которые работают без регулировки частоты вращения. Перед асинхронными аналогами они имеют преимущества, которые касаются следующих моментов:
- КПД несколько выше;
- возможность работы при низкой частоте вращения, благодаря чему удается убрать промежуточные передачи между оборудованием и двигателем;
- отсутствие влияния нагрузки, передаваемой на вал двигателя, на частоту вращений;
- возможность применения в качестве компенсирующих приспособлений реактивной мощности.
При необходимости синхронные двигатели могут выступать в роли генераторов или потребителей реактивной мощности. Основные параметры будут зависеть от величины электрического тока непосредственно в обмотке.
Основные параметры будут зависеть от величины электрического тока непосредственно в обмотке.
|
В отличие от асинхронного
двигателя частота вращения синхронного двигателя  Роторы синхронных машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). На рис. 12.10а изображен сердечник 1 явнополюсного ротора с выступающими полюсами. На полюсах размещены катушки возбуждения 2. На рисунке 12.10б изображен неявнополюсной ротор, представляющий собой ферромагнитный цилиндр 1. На поверхности ротора в осевом направлении фрезеруют пазы, в которые укладывают обмотку возбуждения 2. Рис. 12.10 Рассмотрим принцип работы синхронного двигателя на модели (рис. 12.11).
Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса.  Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма.  В настоящее время применяется асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка. |
 Повернем магнит 1 на угол α. Северный магнитный
полюс магнита 1 притянет южный полюс магнита 2, а южный полюс магнита
1 — северный полюс магнита 2. Магнит 2 повернется на такой же угол
α. Будем вращать магнит 1. Магнит 2 будет вращаться вместе
с магнитом 1, причем частоты вращения обоих магнитов будут одинаковыми,
синхронными,
Повернем магнит 1 на угол α. Северный магнитный
полюс магнита 1 притянет южный полюс магнита 2, а южный полюс магнита
1 — северный полюс магнита 2. Магнит 2 повернется на такой же угол
α. Будем вращать магнит 1. Магнит 2 будет вращаться вместе
с магнитом 1, причем частоты вращения обоих магнитов будут одинаковыми,
синхронными, Разница между BLDC и синхронными двигателями переменного тока
You are here: Home / Motors / DC Motors / В чем разница между BLDC и синхронными двигателями переменного тока?
By Danielle Collins Оставить комментарий
Краткий ответ: бесщеточные двигатели постоянного тока (BLDC) и синхронные двигатели переменного тока аналогичны по конструкции и работе. Некоторые производители и эксперты даже объединяют их как похожие технологии в категорию «синхронных двигателей с постоянными магнитами». Их ключевое отличие, однако, заключается в обмотках катушки статора и результирующей форме волны обратной ЭДС каждого двигателя. Это дает им разные рабочие характеристики и диктует отдельные методы привода для каждого из них.
Сходство конструкции
Несмотря на специфику названий, бесщеточные двигатели постоянного тока и синхронные двигатели переменного тока работают на синхронных скоростях. Бесщеточный означает, что они полагаются на электронику (обычно датчики на эффекте Холла), а не на механические щетки, для управления током в обмотках. А синхронный означает, что их магнитные поля ротора и статора вращаются с одинаковой частотой или с синхронной скоростью
И бесщеточные двигатели постоянного тока, и синхронные двигатели переменного тока имеют постоянные магниты (обычно четыре или более), установленные на роторе. Магниты ротора могут быть либо ферритовыми, которые менее дороги, но имеют относительно низкую магнитную индукцию, либо сплавом редкоземельных элементов (таким как неодим), имеющими более высокую магнитную индукцию, но неподъемные по стоимости для некоторых применений. Статор изготовлен из стальных пластин с обмотками (обычно тремя), размещенными в пазах, вырезанных в осевом направлении в пластинах.
Магниты ротора могут быть либо ферритовыми, которые менее дороги, но имеют относительно низкую магнитную индукцию, либо сплавом редкоземельных элементов (таким как неодим), имеющими более высокую магнитную индукцию, но неподъемные по стоимости для некоторых применений. Статор изготовлен из стальных пластин с обмотками (обычно тремя), размещенными в пазах, вырезанных в осевом направлении в пластинах.
Изображение предоставлено: Texas Instruments Incorporated
Постоянные магниты ротора создают поток ротора, а ток, подаваемый на обмотки статора, создает электромагнитные полюса. Когда положение ротора таково, что полюс N ротора находится рядом с полюсом N статора, полюса отталкиваются друг от друга и создается крутящий момент.
Различия в работе и характеристиках
Противо-ЭДС (Vc) — это напряжение, создаваемое вращением двигателя. Он противодействует приложенному напряжению (Va) и уменьшает ток, протекающий через катушки.
Изображение предоставлено доктором Дж. Р. Уайтом, profjrwhite.com
В двигателях BLDC катушки статора намотаны трапециевидно, а создаваемая противо-ЭДС имеет трапециевидную форму волны. Из-за их трапециевидной формы волны требуется постоянный ток, чтобы получить наилучшие характеристики от двигателей BLDC. Напротив, синхронные двигатели переменного тока имеют синусоидальную обмотку и создают синусоидальную противоЭДС, поэтому для достижения наилучших характеристик им требуется синусоидальный управляющий ток.
Тип тока привода также влияет на уровень шума, производимого двигателем. Трапециевидный управляющий ток, используемый двигателями BLDC, имеет тенденцию создавать большее количество звуковых и электрических шумов по сравнению с синхронными двигателями переменного тока с синусоидальным управлением.
Синусоидальная (слева) и трапецеидальная (справа) формы сигналов тока для синхронных двигателей переменного тока и бесщеточных двигателей постоянного тока соответственно.
Изображение предоставлено STMicroelectronics
Коммутация, которая представляет собой процесс переключения фазных токов двигателя для управления соответствующей катушкой статора, определяется положением ротора. В двигателях BLDC положение ротора обычно контролируется тремя датчиками на эффекте Холла, а коммутация достигается за шесть шагов или каждые 60 электрических градусов. Поскольку коммутация не является непрерывной, пульсации крутящего момента возникают при каждой коммутации фазы (каждые 60 градусов).
Синхронные двигатели переменного тока выигрывают от непрерывного мониторинга положения ротора с помощью одного датчика Холла или поворотного энкодера в сочетании с логикой управления. Поскольку их коммутация является непрерывной, синхронные двигатели переменного тока могут работать без пульсаций крутящего момента, характерных для двигателей BLDC. Однако синусоидальная коммутация требует более сложных алгоритмов управления, чем трапециевидная коммутация.
Хотя их конструкция практически идентична, разница в токе привода и противо-ЭДС между BLDC и синхронными двигателями переменного тока является существенным отличием.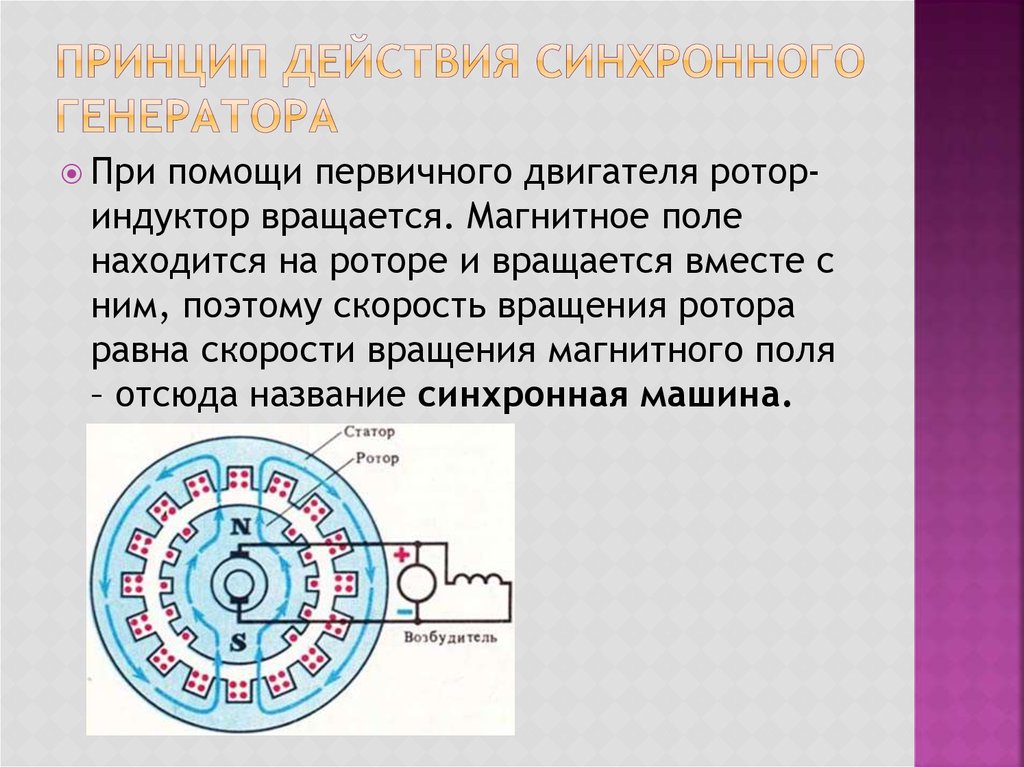 Применение соответствующего управляющего тока и управления является важным фактором их работы и производительности.
Применение соответствующего управляющего тока и управления является важным фактором их работы и производительности.
Рубрики: Двигатели постоянного тока, Часто задаваемые вопросы + основы, Двигатели, Серводвигатели, Шаговые двигатели С тегами: двигатель bldc, бесщеточный двигатель, двигатель с постоянными магнитами, синхронный двигатель
электрическая машина — Электродвигатель увеличенного размера, синхронный и асинхронный
спросил
Изменено 1 год, 2 месяца назад
Просмотрено 52 раза
\$\начало группы\$
Я знаю, что большой двигатель будет потреблять больше энергии, чем двигатель хорошего размера, и в сценарии с низкой нагрузкой он также будет иметь более низкий коэффициент мощности, чем двигатель хорошего размера.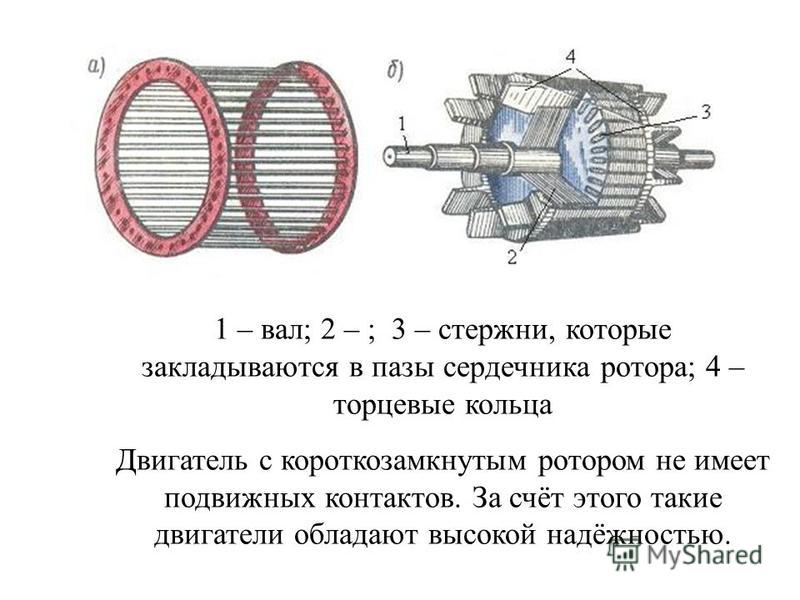 Мой вопрос: в чем разница между синхронными и асинхронными двигателями увеличенного размера? Будет ли это падение коэффициента мощности связано с отстающим или опережающим током для асинхронного и синхронного режимов соответственно?
Также синхронные двигатели будут вести себя как конденсаторы при небольшой нагрузке. Но какой недостаток может вызвать такой эффект в сети с более чем 8 двигателями увеличенной мощности?
Мой вопрос: в чем разница между синхронными и асинхронными двигателями увеличенного размера? Будет ли это падение коэффициента мощности связано с отстающим или опережающим током для асинхронного и синхронного режимов соответственно?
Также синхронные двигатели будут вести себя как конденсаторы при небольшой нагрузке. Но какой недостаток может вызвать такой эффект в сети с более чем 8 двигателями увеличенной мощности?
- асинхронный двигатель
- электрический двигатель
- синхронный двигатель
- двигатель переменного тока
\$\конечная группа\$
5
\$\начало группы\$
Асинхронные двигатели имеют отстающий коэффициент мощности. Если двигатели слишком большие, отстающий коэффициент мощности будет больше.
Коэффициент мощности синхронных двигателей с возбуждением можно отрегулировать так, чтобы он был опережающим или отстающим.