
Применение шаговых двигателей в станках с ЧПУ управлением
Применение шаговых двигателей
2016-09-02
Применение шаговых двигателей и сравнение двигателей.
В работе фрезеров используются два типа двигателя: шаговый – электромеханическое устройство, преобразующее сигналы в угловое перемещение ротора с фиксацией в заданном положении. И серводвигатели – имеющие обратную связь, и которыми можно управлять через цепь контроллера путём увеличения и уменьшения тока. Шаговые имеют меньшую мощность и скорость, и значительно дешевле серводвигателей.
Как правило, шаговый электродвигатель – это электромеханическое устройство, которое преобразует сигналы управления в угловое перемещение его ротора с качественной фиксацией в заданном положении. Сегодня современные шаговые двигатели (ШД), по сути, являются синхронными двигателями, не имеющими пусковую обмотку на роторе, что соответственно объясняется частотным пуском самого ШД. Последовательная активация обмоток двигателя порождает дискретные угловые перемещения (т. е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.
е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.
Шаговый двигатель относится к классу так называемых «бесколлекторных» двигателей постоянного тока. Такие двигатели как непосредственно и любые другие бесколлекторные электрические машины, имеют достаточно высокую надежность и весьма внушительный срок службы, что в свою очередь позволяет применять их в самых разных индустриальных сферах. Если сравнивать обычные электродвигатели постоянного тока с шаговыми двигателями, то последние требуют более сложных схем управления, выполняющие абсолютно все коммутации обмоток.
Сегодня существуют три основных типа/вида шаговых двигателей
Серводвигатели
Серводвигатель – это непосредственно двигатель с обратной связью, которой можно управлять, чтобы или достичь требуемой скорости (следовательно, крутящего момента) или же получить необходимый угол поворота. Именно для этой цели устройство обратной связи посылает определенные сигналы в цепь контроллера серводвигателя, сообщая о скорости и соответственно угловом положении.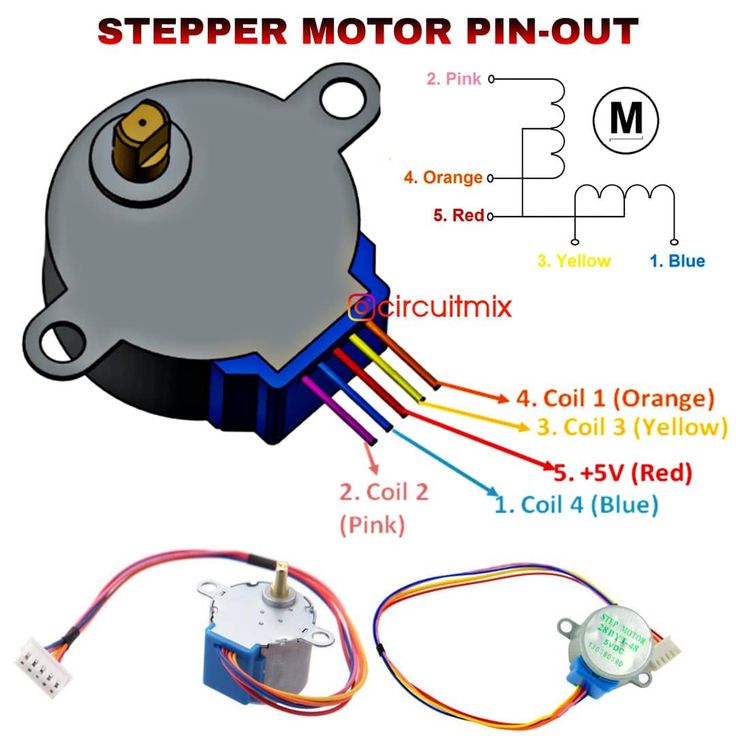 Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.
Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.
Для этого могут использоваться разные типы/виды датчиков, включая кодирующие устройства, например, такие как: потенциометры, тахометры и резольверы. Если применяется датчик положения типа кодирующего устройства или потенциометра, его сигнал вполне может быть дифференцирован для того, чтобы выработать определенный сигнал о скорости.
На сегодняшний день сервоприводы используются в высокопроизводительном оборудовании, к примеру, в таких производственных отраслях как: изготовление различных стройматериалов, напитков, упаковки, в полиграфии и подъемно-транспортной технике.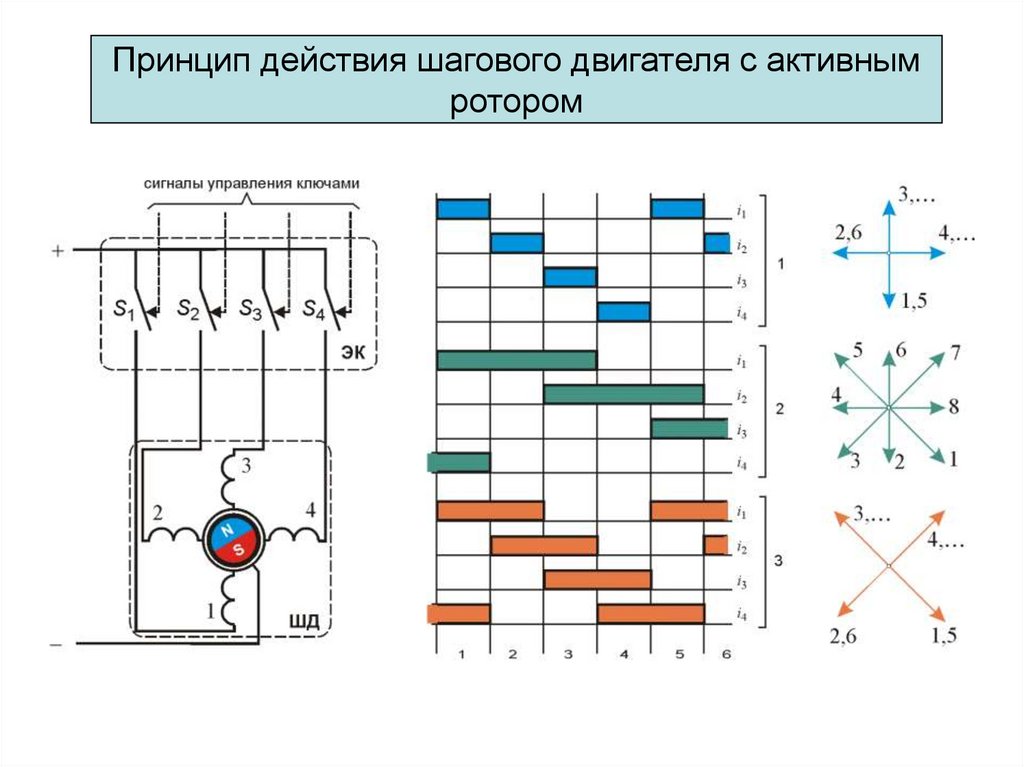 Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.
Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.
Решающим фактором использования сервоприводов является не только высокая их динамика, но и возможность получить высокостабильное или точное управление, широкий диапазон регулирования скорости, малые габариты и вес, а также помехоустойчивость.
Для сервоприводов характерны показатели
Сравнение работы простого cерво и iагового двигателей
Для понимания различия между обычным шаговым и серво двигателем давайте рассмотрим работу системы именно с шаговым мотором, на котором непосредственно стоит энкодер (шаговый серводвигатель).
Контроллер выдал команду на какое-то количество шагов – повернуть вал. В обычном шаговом двигателе контроллер не в курсе, насколько конкретно шагов повернулся вал (т. к. у него отсутствует обратная связь). Просто он «считает», что вал повернулся правильно. А ведь бывает, что двигатель не смог повернуть вал или силы не хватило или по другой какой-либо причине.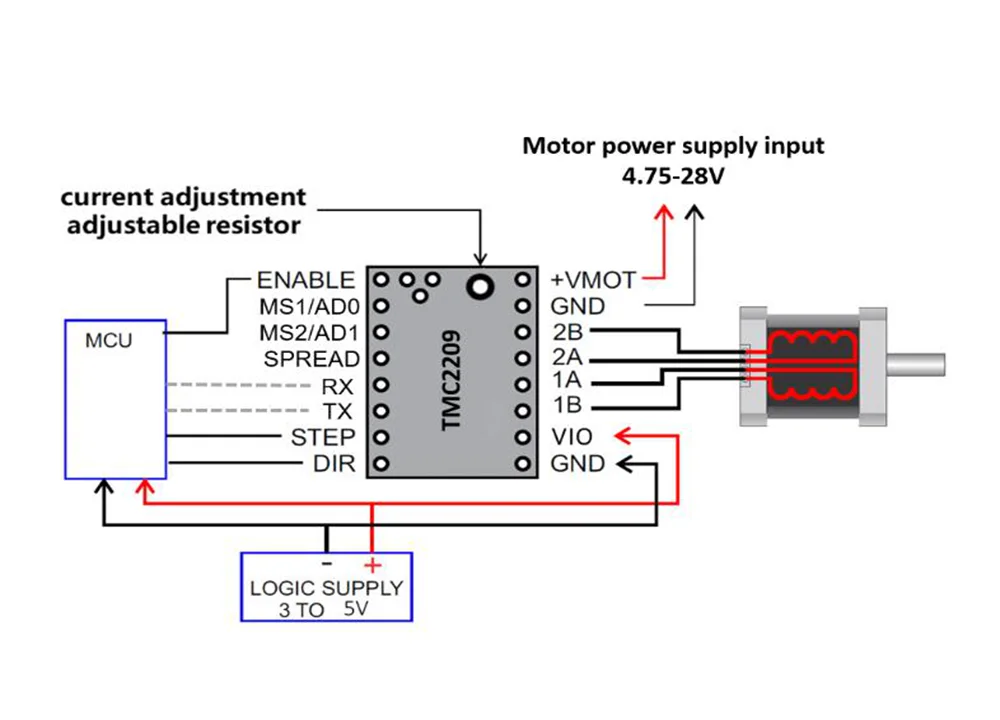 Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.
Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.
В серводвигателе же подобная проблема полностью отсутствует. Контроллер дал команду вал повернуть настолько-то импульсов и ожидает покуда с энкодера придет сигнал, который подтвердит, что вал повернулся на необходимое число импульсов. При этом если с энкодера поступил, хотя бы на 1 импульс меньше, контроллер все равно будет продолжать подавать команду, пока с энкодера не поступит последний импульс, который выровняет соотношение истинного и заданного количества импульсов. Либо же по истечении заданного периода времени, контроллер выдаст специальный сигнал «Ошибка перемещения».
В сервоприводе удержание осуществляется исключительно за счет тока, протекающего непосредственно через обмотку двигателя. При этом в момент удержания половины периода ток поступает в одном направлении, а вторую половину оставшегося времени в ином направлении. Именно за счет этого происходит удержание якоря. В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
Преимущества шагового двигателя
Преимущества серводвигатель
Выводы
Ограничением в использовании шаговых двигателей являются мощность и соответственно скорость, однако по практике, их применение целиком оправданно в недорогих станках имеющих систему ЧПУ, предназначенных для обработки дерева, ДСП, МДФ, пластиков, легких металлов и прочих материалов средней скорости, необходимости производителей станков с ЧПУ по точности и по скорости. Если по каким-либо причинам такие параметры не устраивают, то, как правило, используют сервоприводы. Но стоит заметить, что при этом резко и, причем значительно поднимается стоимость конструкции в целом.
Если смотреть с другой стороны, то достичь реальной экономии времени обработки и даже при скоростных сервоприводах, можно за счет экономии на переходах и соответственно оптимизации путей обработки. В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.
В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.
Достоинства сервопривода таковы, что использовать их можно было бы постоянно, когда только возможно, конечно если бы не два существенных недостатка: цена самого комплекта (т. е. блок управления + сервомотор) и сложность настройки, которая временами делает применение сервопривода совершенно – необоснованным.
Шаговый двигатель для ЧПУ | Техника и человек
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции.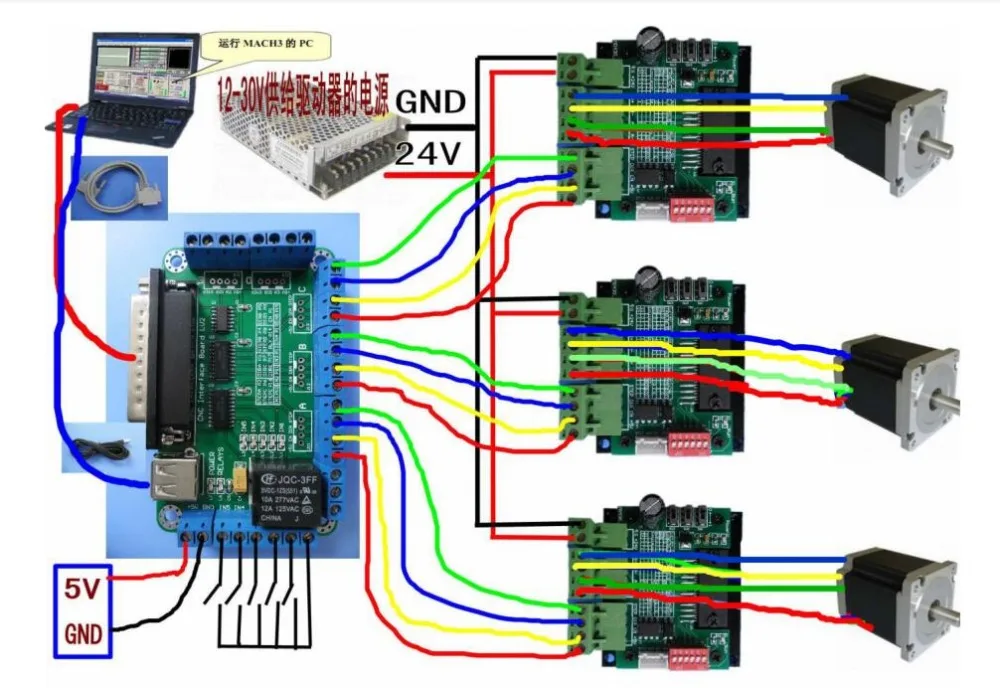 Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
- С переменным магнитным сопротивлением. Устройство таких моторов предполагает наличие нескольких полюсов на статичном элементе. Ротор в данном виде ШД обладает зубчатой формой и создается он из не жесткого материала, к тому же при этом сам не является намагниченным. Если мы в качестве примера рассмотрим мотор с переме
нным сопротивлением, в котором статор будет шести-полюсным, а конструкция ротора состоит из четырех зубцов, то количество независимых обмоток в таком двигателе составит 3 штуки. Каждая из них наматывается на два противоположных статорных полюса. Размер одного шага такого мотора составит 30 градусов. - ШД с постоянными магнитами.
 Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48. - Шаговые двигатели гибридного типа. При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов.
 Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные. Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения. Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
- Удерживающий момент. Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент. Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока.
- Номинальное напряжение. Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса. Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
 Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.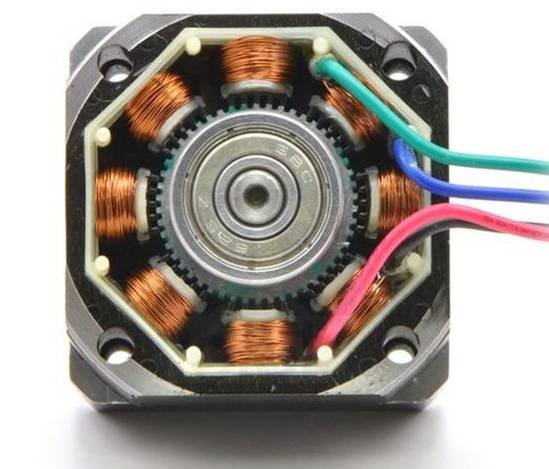

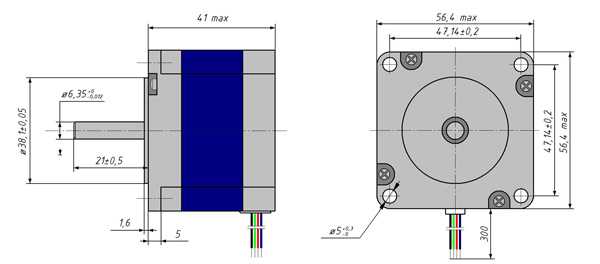
Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6. 0±20% 0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Радиальное биение вала двигателя (нагрузка 450г.) | Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1. | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
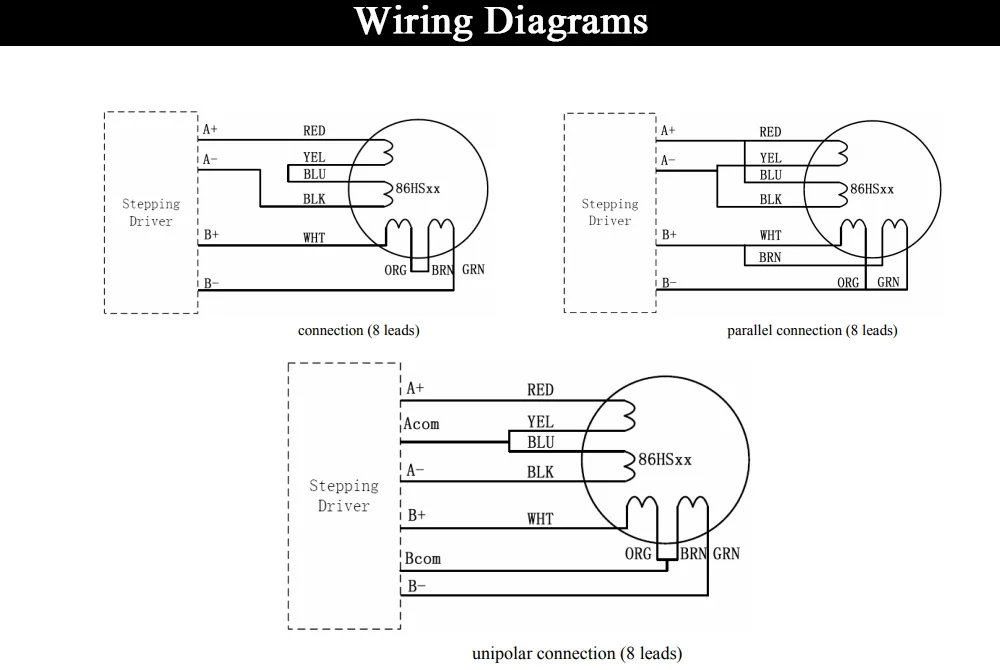
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки.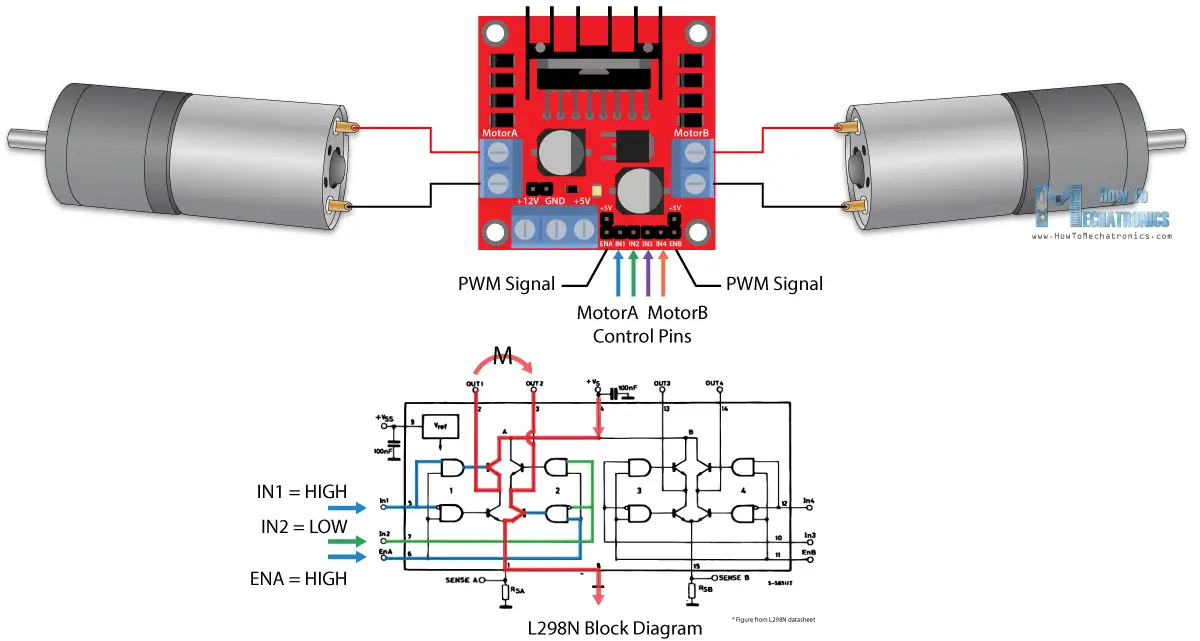 Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.

Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с регулированием скорости
Информация о продукте Решения Техническая информация Размер двигателя Загрузки Виртуальный выставочный зал Свяжитесь с нами
αSTEP Шаговые двигатели Бесщеточные двигатели постоянного тока Серводвигатели Редукторные двигатели переменного тока Линейные приводы Поворотные приводы Сетевые продукты Вентиляторы охлаждения
Бесплатная доставка для онлайн-заказов. Принять условия.
Принять условия.
Шаговые двигатели
Шаговые двигатели позволяют с легкостью выполнять точное позиционирование. Они используются в различных типах оборудования для точного регулирования угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели с компактным корпусом генерируют высокий крутящий момент и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также удерживают свое положение при остановке благодаря своей механической конструкции. Решения для шаговых двигателей состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Компания Oriental Motor предлагает множество решений для самых разных областей применения:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции с редуктором, энкодером и электромагнитным тормозом
- Драйверы шаговых двигателей с входом переменного или постоянного тока
- Размеры корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм)
Подробнее. ..
..
- Шаговые двигатели (только двигатель)
- Драйверы шаговых двигателей
- Шаговые двигатели с регулированием скорости
- Контроллеры
Шаговые двигатели (только двигатель)
Компания Oriental Motor предлагает широкий ассортимент шаговых двигателей, в том числе; Шаговые двигатели с замкнутым контуром AlphaStep, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны с размерами корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять шаговых двигателей с редуктором, варианты энкодера и тормоза, а также различные обмотки двигателя.
- Шаговые двигатели 0,79–3,54 дюйма (20–90 мм) NEMA 8–NEMA 34 типоразмера корпуса
- Доступны беззазорные, малозазорные и прямозубые шестерни
- Шаговые двигатели с замкнутым контуром AlphaStep, двухфазные шаговые двигатели и пятифазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
- αSTEP Шаговые двигатели с замкнутым контуром
- 2-фазные шаговые двигатели
- 5-фазные шаговые двигатели
Драйверы шаговых двигателей
Драйверы шаговых двигателей преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Шаговые двигатели с замкнутым контуром AlphaStep, драйверы 2-фазных или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet/IP™, EtherCAT, PROFINET Совместимые версии
- Плата или коробка Тип
- αSTEP Драйверы с обратной связью
- 2-фазные драйверы
- 5-фазные драйверы
EtherNet/IP™ является товарным знаком ODVA
Шаговые двигатели и драйверы для управления скоростью
Система управления скоростью серии SC предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера. Рабочая скорость, время разгона и торможения, рабочий ток могут быть установлены с помощью переключателей драйвера, а простое переключение входа FWD (RVS) в положение ON или OFF обеспечивает простоту управления.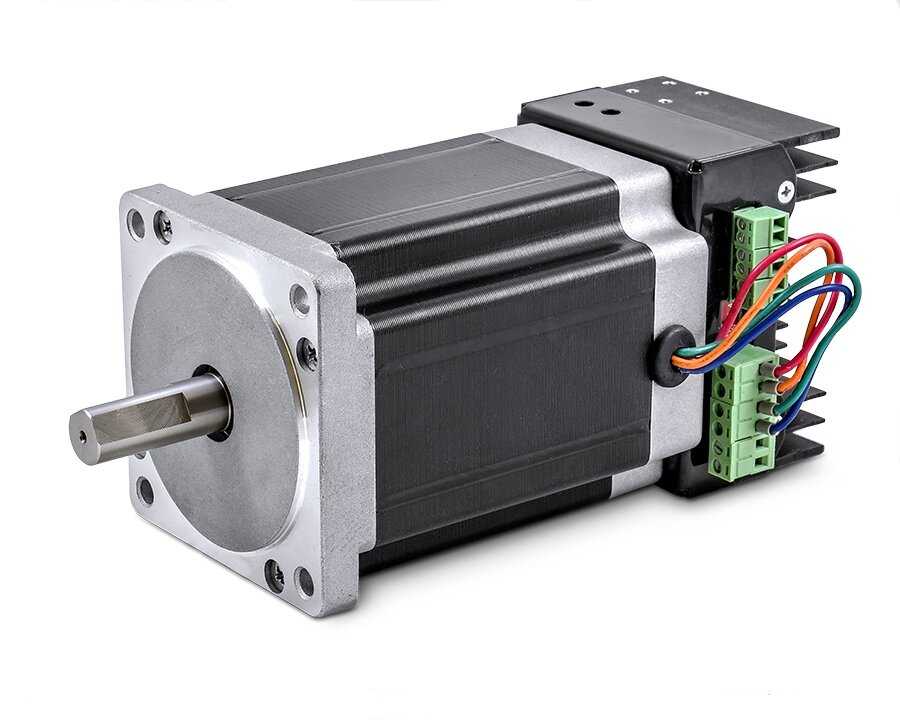
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры/сетевые шлюзы
Контроллеры и сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного входа
- Сетевые преобразователи/шлюзы (связь RS-485)
- EtherCat
- CC-Link
- МЕХАТРОЛИНК
- Контроллеры
- Сетевые шлюзы
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления. Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальных вибрациях идеально подходят для приложений, требующих быстрого позиционирования на небольшом расстоянии.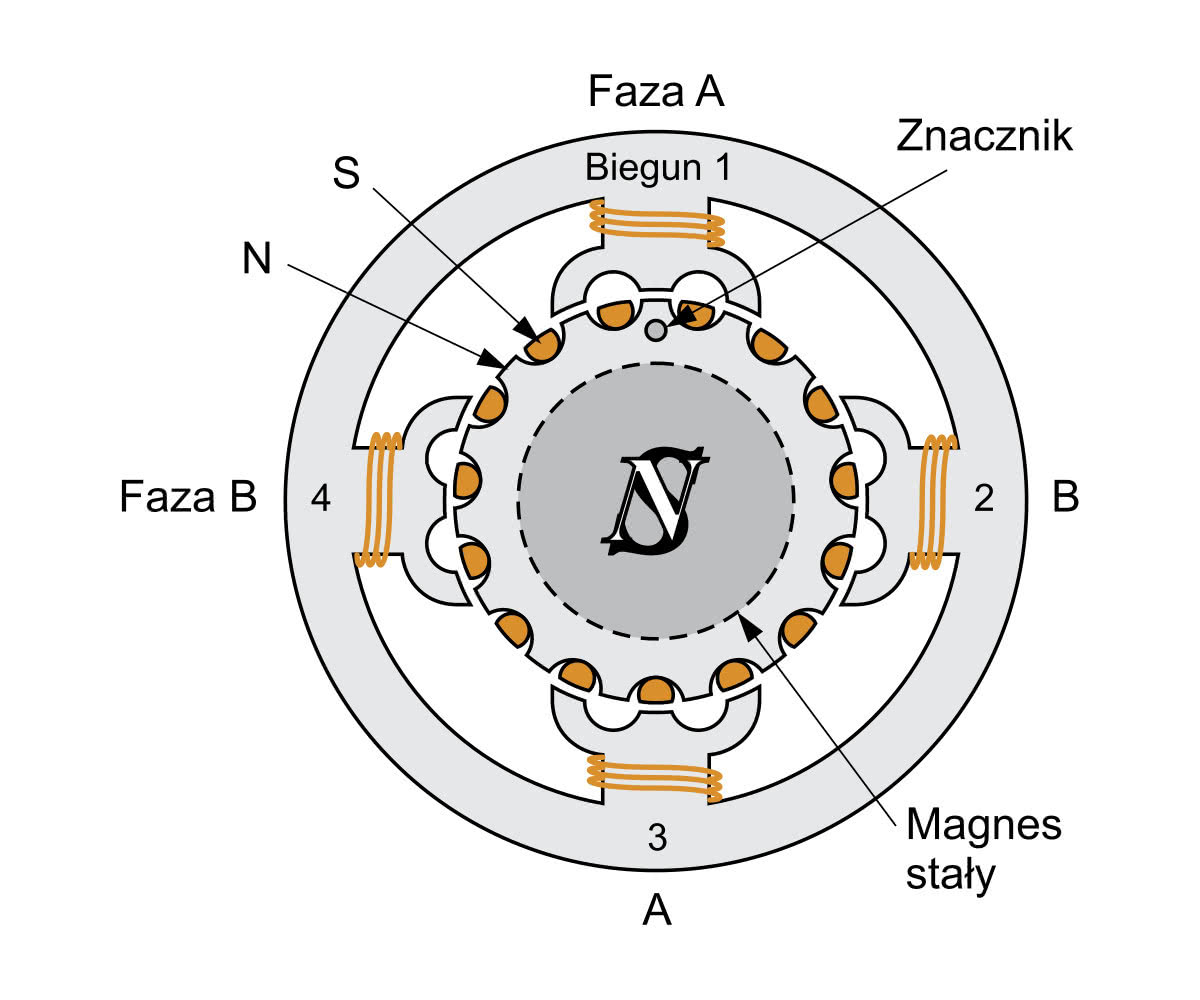
Точное позиционирование с точным шагом
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «базовым углом шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0,36°, 0,72°, 0,9° и 1,8°. 5-фазные шаговые двигатели имеют угол шага 0,36° и 0,72°, а 2-фазные шаговые двигатели имеют угол шага 0,9° и 1,8°.
Использование технологии гибридных шаговых двигателей
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничивается в осевом направлении, как шаговый двигатель с постоянными магнитами, а статор питается электромагнитным полем, как шаговый двигатель с переменным сопротивлением. И статор, и ротор многозубчатые.
Гибридный шаговый двигатель имеет аксиально намагниченный ротор, что означает, что один конец намагничен как северный полюс, а другой конец как южный полюс. Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Ниже показана конфигурация системы для высокоточного позиционирования. Угол поворота и скорость шагового двигателя можно точно контролировать с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого постоянно меняется между ON и OFF. Каждый цикл ВКЛ/ВЫКЛ считается как один импульс. Команда с одним импульсом заставляет выходной вал двигателя провернуться на один шаг. Уровни сигналов, соответствующие состояниям ВКЛ и ВЫКЛ напряжения, обозначены как «H» и «L» соответственно.
Количество оборотов пропорционально количеству импульсов
Количество оборотов шагового двигателя пропорционально количеству импульсных сигналов (число импульсов), подаваемых драйверу. Соотношение вращения шагового двигателя (угол поворота выходного вала двигателя) и числа импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоте импульсов), подаваемых на драйвер. Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Создание высокого крутящего момента в компактном корпусе
Шаговые двигатели генерируют высокий крутящий момент в компактном корпусе. Эти особенности обеспечивают превосходное ускорение и реакцию, что, в свою очередь, делает эти двигатели подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в большем крутящем моменте на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживает себя в остановленном положении
Шаговые двигатели продолжают генерировать удерживающий момент даже в состоянии покоя. Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
После отключения питания момент самоудержания двигателя теряется, и двигатель больше нельзя удерживать в остановленном положении при вертикальных операциях или при приложении внешней силы. В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели и драйверы с замкнутым контуром — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для максимального использования возможностей шагового двигателя. Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выдавать сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Узнайте больше о наших продуктах AlphaStep
Типы операционных систем
Каждый шаговый двигатель и драйвер сочетают в себе шаговый двигатель различных типов со специальным драйвером. Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигатель может управляться с помощью генератора импульсов, предоставленного пользователем. Рабочие данные вводятся в генератор импульсов заранее. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит рабочую команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем с помощью непосредственно подключенного персонального компьютера или программируемого контроллера. Так как не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают проводку.
Разница между входными характеристиками переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и приводных системах на 100–115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока (некоторые продукты являются исключением из этого правила).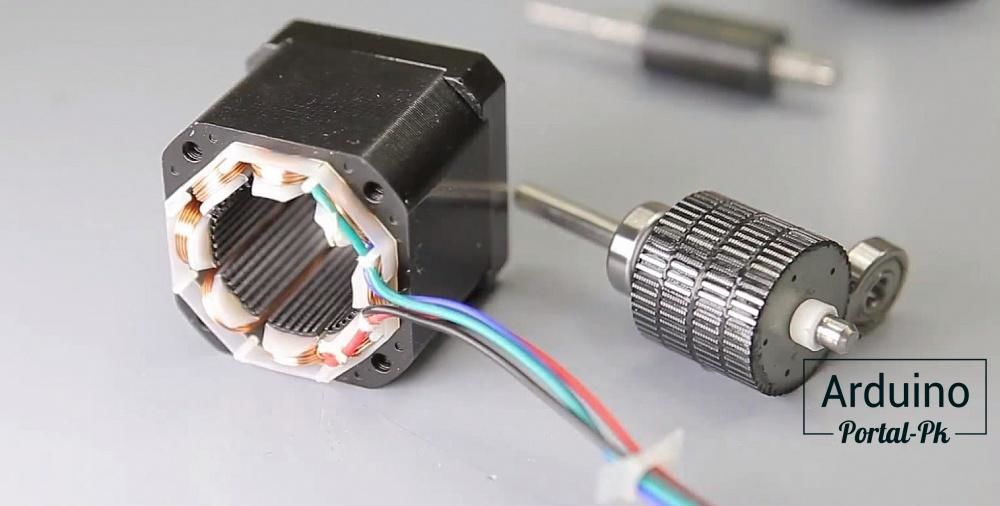
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях. Таким образом, двигатель переменного тока и система драйвера имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, предлагая большое передаточное число.
Рекомендуется, чтобы для вашего приложения рассматривались системы двигателя и драйвера с входом переменного тока, которые совместимы в более широком диапазоне условий эксплуатации, чем системы с входом постоянного тока.
- Поиск по артикулу
- Слайд с содержанием
- Слайд с содержанием
Шаговые двигатели. Множество размеров и версий мощности.
Шаговые двигатели с обратной связью как альтернатива двигателям BLDC
Технология шаговых двигателей долгое время считалась экономичной альтернативой приложениям, не требующим высокой производительности, обеспечиваемой серводвигателями. Благодаря привлекательной цене производства и сравнительно высокому соотношению крутящего момента к размеру они продолжали использоваться в приборостроении. Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
Благодаря привлекательной цене производства и сравнительно высокому соотношению крутящего момента к размеру они продолжали использоваться в приборостроении. Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
Эта тенденция была остановлена и даже обращена вспять в последние годы благодаря разработке управляемых шаговых двигателей с обратной связью. Сердцем технологии с обратной связью является регулирование тока с поправкой на мощность и обратная связь по управляющему сигналу. Эти шаговые двигатели управляются точно так же, как и серводвигатели: положение ротора определяется с помощью сигналов энкодера, а в обмотках двигателя генерируются синусоидальные фазные токи. Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
В сочетании с более выгодной ценой системы шаговых двигателей, шаговые двигатели с обратной связью являются экономичной альтернативой сервосистемам. Тем не менее, системам с обратной связью не всегда удавалось вытеснить системы с обратной связью в традиционных приложениях с шаговыми двигателями, таких как автоматизация лабораторий или небольшие фрезерные станки с ЧПУ. Хотя технология с обратной связью и здесь дает преимущества, высокая стоимость энкодера, которая обычно намного превышает стоимость небольшого двигателя, как правило, препятствует широкому использованию этой технологии в этих приложениях. Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Хотя технология с обратной связью и здесь дает преимущества, высокая стоимость энкодера, которая обычно намного превышает стоимость небольшого двигателя, как правило, препятствует широкому использованию этой технологии в этих приложениях. Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Виртуальный энкодер заменяет реальный энкодер
Чтобы воспользоваться преимуществами ориентированного на поле управления в этих приложениях, Nanotec разработала безсенсорное, т.е. без энкодера, управление шаговыми двигателями, в котором фактическое положение а скорость ротора определяется «виртуальным энкодером» в контроллере.
Системы без датчиков уже много лет используются в двигателях BLDC, особенно в вентиляторах и насосах, не требующих управления положением. Во всех бессенсорных системах используется физический эффект, заключающийся в том, что двигатель индуцирует противодействующее напряжение (противоЭДС) во время работы, которое пропорционально скорости.
Простейший безсенсорный контроль заключается в прямом измерении противо-ЭДС, когда катушка обесточена в цикле коммутации. Однако по сравнению со стандартной активацией этот метод требует специального оборудования и стабилен только прибл. 10–20 % от номинальной скорости двигателя, ниже которой сигнал измерения слишком мал. По этой причине требовательные приложения теперь полагаются на системы, которые с помощью «наблюдателя» восстанавливают значения, которые не могут быть измерены напрямую, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является точная модель двигателя, которая параллельно с реальным двигателем вычисляет значения, такие как ток в обмотке, на основе известных входных значений, таких как установленная ШИМ. Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. В результате получается «виртуальный энкодер», который выдает информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. В результате получается «виртуальный энкодер», который выдает информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Все двигатели Plug & Drive от Nanotec реализуют управление, ориентированное на поле (замкнутый контур). BLDC и шаговые двигатели контролируются по полю в зависимости от нагрузки и отличаются только рабочими точками из-за разного количества полюсов. Таким образом, оба этих типа двигателей ведут себя как сервоприводы постоянного тока. Положение ротора, необходимое для управления, или угол поля можно установить с помощью поворотного энкодера или бездатчикового метода, который описан ниже.
Без потерь на шаг, без резонансов
Критически важным фактором для качества контроллера на основе наблюдателя является хорошая модель используемого двигателя, как с точки зрения математических формул, так и с точки зрения констант двигателя подключенного двигателя.
Таким образом, перед нами стояла задача найти достаточно точную математическую модель двигателя, которую можно было бы полностью рассчитать в каждом цикле управления даже в небольшом микропроцессоре. В принципе, шаговые двигатели математически аналогичны двигателям BLDC, но имеют только две фазы вместо обычных трех фаз BLDC, а также демонстрируют некоторые особенности в модели на более высоких скоростях из-за большего количества полюсов.
Другим важным аспектом практического использования бездатчикового контроллера является идентификация параметров модели. Контроллеры BLDC часто требуют большого количества параметров, зависящих от двигателя, которые часто не указаны в технических описаниях, но требуют значительных усилий для определения. Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Бессенсорная система от Nanotec, напротив, работает с очень небольшим количеством параметров, которые на самом деле не обязательно знать пользователю: процедура автоматической настройки измеряет подключенный двигатель и автоматически определяет все необходимые параметры.
В зависимости от типа двигателя информация о скорости и положении поступает в диапазоне от 100 до 250 об/мин. Эта информация столь же точна, как и у оптического энкодера с шагом 500 или 1000. Результирующее управление двигателем имеет такое же качество и крутящий момент, как и управление двигателем с помощью энкодера. Даже ниже этого порогового значения безсенсорное управление все еще работает при температуре прибл. 10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
Напротив, на высоких скоростях бездатчиковая система работает лучше, чем поворотный энкодер, который всегда демонстрирует допуск на биение, что приводит к синусоидальной угловой ошибке. В стандартных энкодерах без собственных подшипников эта ошибка может достигать величины до ±1°, что приведет к вибрациям в замкнутом режиме на более высоких скоростях. С другой стороны, в виртуальных энкодерах ошибка на высоких скоростях имеет тот же порядок, что и погрешность угла шага двигателя (±0,09°). Кроме того, энкодеры всегда выдают цифровые дискретные значения положения. Особенно при низких разрешениях это приводит к колебаниям синхронизации двигателя. Значение виртуального энкодера, напротив, является непрерывным и постоянным.
Управление на основе наблюдателя делает ненужным использование двигателей с очень высокой противо-ЭДС, но недостатком которых является высокая индуктивность и, следовательно, более низкая динамика.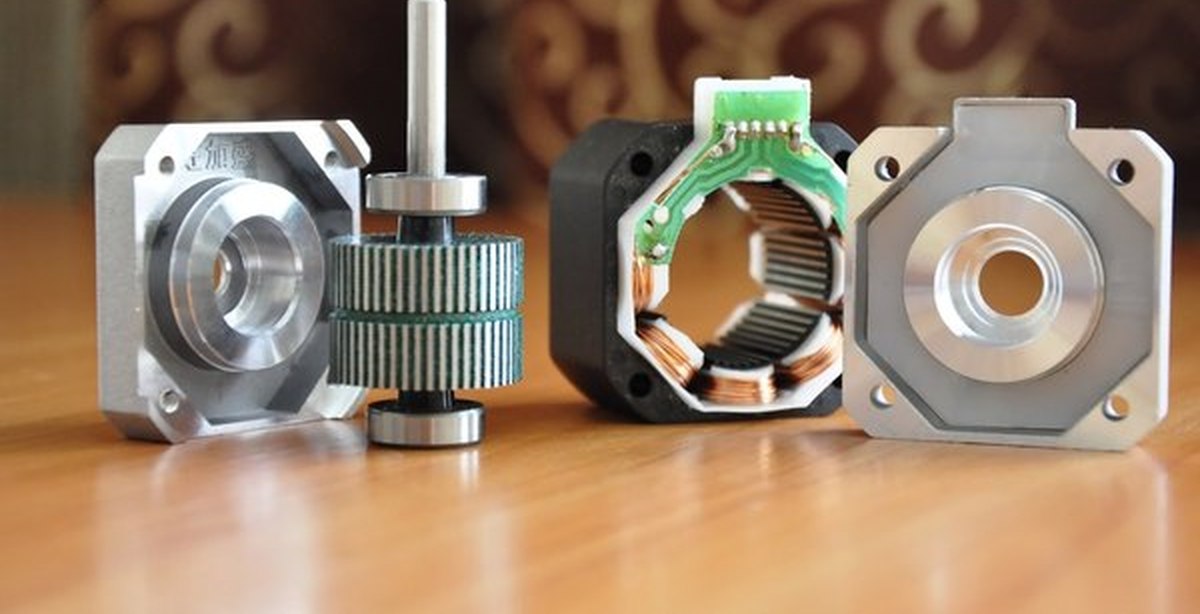 Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Сочетание разомкнутого и замкнутого контура
Бездатчиковое управление особенно удобно для шаговых двигателей, поскольку его можно использовать не только для управления скоростью, но и для позиционирования в сочетании с управлением без обратной связи. Алгоритм без датчиков способен определять точность, с которой в данный момент оценивается скорость. Если сигнал становится слишком неточным при снижении скорости, система автоматически переключается в режим без обратной связи, и позиционирование по-прежнему возможно. Поскольку обычно на низких скоростях в режиме разомкнутого контура проходит всего несколько шагов, резонансы здесь не проблема. При перезапуске из состояния покоя требуется всего несколько градусов, чтобы вернуться в режим с обратной связью. Таким образом, бездатчиковая технология позволяет использовать преимущества ориентированного на поле управления практически во всех традиционных приложениях с шаговыми двигателями.