
ЛЕКЦИЯ 8. Электрические машины постоянного тока. Устройство электрической машины постоянного тока
Похожие презентации:
3D печать и 3D принтер
Видеокарта. Виды видеокарт
Анализ компании Apple
Трансформаторы тока и напряжения
Транзисторы
Устройство стиральной машины LG. Электрика
Конструкции распределительных устройств. (Лекция 15)
Электробезопасность. Правила технической эксплуатации электроустановок
Магнитные пускатели и контакторы
Работа на радиостанциях КВ и УКВ диапазонов. Антенны военных радиостанций. (Тема 5.1)
1. Лекция 8
ЛЕКЦИЯ 82. Электрические машины постоянного тока Устройство электрической машины постоянного тока
2Электрические машины постоянного тока
Устройство электрической машины постоянного тока
Электрическими машинами называются устройства,
предназначенные для преобразования механической
энергии вращения в электрическую (генератор) и
наоборот, электрическую энергию в механическую
(двигатель).

Работа электрической машины основана на единстве
закона электромагнитной индукции и закона
электромагнитных сил.
3
Возьмем устройство, состоящее из
двух магнитных полюсов
создающих постоянное магнитное
поле, и якоря – стального
цилиндра с уложенным на нем
витком из электропроводного
материала.
Концы витка присоединены к двум
металлическим полукольцам,
изолированным друг от друга и от
вала.
Полукольца соприкасаются с
неподвижными щетками,
соединенными с внешней цепью
4
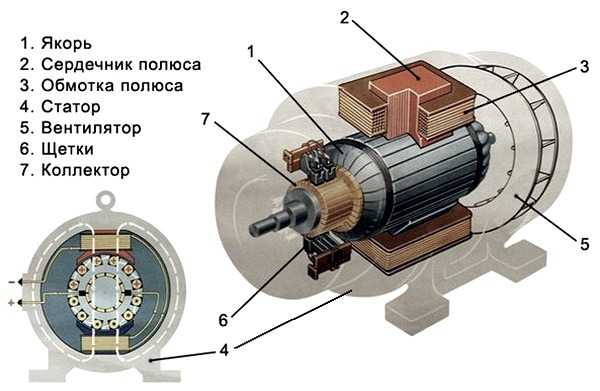
Электрическая машина постоянного тока состоит из двух
основных частей: неподвижной части (индуктора) и
вращающейся части ( якоря с барабанной обмоткой).
На рисунке изображена конструктивная схема машины
постоянного тока:
Якорь состоит из следующих
элементов: сердечника 3,
обмотки 4, уложенной в пазы
сердечника, коллектора
5.
Сердечник якоря для
уменьшения потерь на
вихревые точки набирается из
изолированных друг от друга
листов электротехнической
стали.

5. Принцип действия машины постоянного тока
5Принцип действия машины постоянного тока
Рассмотрим работу машины постоянного тока на представленной
модели:
1 – полюсы индуктора,
2 — якорь,
3 — проводники,
4 — контактные щетки.
Проводники якорной обмотки расположены на поверхности якоря.
Очистим внешние поверхности проводников от изоляции и
наложим на проводники неподвижные контактные
щетки. Контактные щетки размещены на линии геометрической
нейтрали, проведенной посредине между полюсами.
Определим направление ЭДС, индуктированных в проводниках якорной
обмотки по правилу правой руки.
На рисунке крестиком
обозначены ЭДС, направленные
от нас, точками — ЭДС,
направленные к нам.
Соединим проводники между собой так,
чтобы ЭДС в них складывались.
Для этого соединяют последовательно
конец проводника, расположенного в зоне
одного полюса с концом проводника,
расположенного в зоне полюса
противоположной полярности.

7
Два проводника, соединенные последовательно, образуют один виток
или одну катушку.
величине.
Наибольшая ЭДС индуктируется в проводнике, расположенном под
срединой полюса, ЭДС, равная нулю, — в проводнике, расположенном
на линии геометрической нейтрали.
Если соединить все проводники обмотки
по определенному правилу
последовательно, то результирующая
ЭДС якорной обмотки равна нулю, ток в
обмотке отсутствует.
Контактные щетки делят якорную обмотку
на две параллельные ветви. В верхней
параллельной ветви индуктируется ЭДС
одного направления, в нижней
параллельной ветви — противоположного
направления. ЭДС, снимаемая
контактными щетками, равна сумме
электродвижущих сил проводников,
8
На рисунке представлена схема замещения якорной обмотки:
В параллельных ветвях действуют одинаковые ЭДС, направленные
встречно друг другу.

При подключении к якорной обмотке сопротивления в параллельных ветвях
возникают одинаковые токи
, через сопротивление
протекает ток
ЭДС якорной обмотки пропорциональна частоте вращения якоря
English Русский Правила
10. Машины постоянного тока. Устройство и принцип действия. Основные соотношения. Характеристики.
Машина
постоянного тока — электрическая
машина,
предназначенная для преобразования
механической
Устройство электрической машины постоянного тока.
Электрическая машина постоянного тока состоит из двух основных частей: неподвижной части ( индуктора) и вращающейся части ( якоря с барабанной обмоткой). На рис. 1 изображена конструктивная схема машины постоянного тока
Индуктор
состоит из станины 1 цилиндрической
формы, изготовленной из ферромагнитного
материала, и полюсов с обмоткой возбуждения
2, закрепленных на станине.
Рис. 1
Принцип действия машины постоянного тока
Рассмотрим работу машины постоянного тока в режиме генератора на модели рис.2,
Рис. 2
где 1 — полюсы индуктора, 2 — якорь, 3
— проводники, 4 — контактные щетки.
Проводники
якорной обмотки расположены на поверхности
якоря. Внешние поверхности проводников
очищены от изоляции, а на эти поверхности
проводников наложены неподвижные
контактные щетки.
Контактные
щетки размещены на линии геометрической
нейтрали, проведенной посредине между
полюсами. Приведем
якорь машины во вращение в направлении,
указанном стрелкой.
Определим
направление ЭДС, индуктированных в
проводниках якорной обмотки по правилу
правой руки.
Приведем
якорь машины во вращение в направлении,
указанном стрелкой.
Определим
направление ЭДС, индуктированных в
проводниках якорной обмотки по правилу
правой руки.
На рис.2 крестиком обозначены ЭДС, направленные от нас, точками — ЭДС, направленные к нам. Соединим проводники между собой так, чтобы ЭДС в них складывались.
Работа электрической машины постоянного тока в режиме двигателя. Основные уравнения.
Под действием напряжения, подведенного к якорю двигателя, в обмотке якоря появится ток Iя. При взаимодействии тока с магнитным полем индуктора возникает электромагнитный вращающий момент:
где CM — коэффициент, зависящий от конструкции двигателя.
На рис. 12 изображен схематично двигатель постоянного тока, выделен проводник якорной обмотки.
Ток в проводнике направлен
от нас. Направление электромагнитного
вращающего момента определится по
правилу левой руки. Якорь вращается
против часовой стрелки. В проводниках
якорной обмотки индуцируется ЭДС,
направление которой определяется
правилом правой руки. Эта ЭДС направлена
встречно току якоря, ее называют
противо-ЭДС.
Направление электромагнитного
вращающего момента определится по
правилу левой руки. Якорь вращается
против часовой стрелки. В проводниках
якорной обмотки индуцируется ЭДС,
направление которой определяется
правилом правой руки. Эта ЭДС направлена
встречно току якоря, ее называют
противо-ЭДС.
В установившемся режиме электромагнитный вращающий момент Мэм уравновешивается противодействующим тормозным моментом М2 механизма, приводимого во вращение.
Н
Рисунок 13
а рис. 13 показана схема замещения якорной обмотки двигателя. ЭДС направлена встречно току якоря. В соответствии со вторым законом Кирхгофа , откуда . (3)
Уравнение (3) называется основным уравнением двигателя.
Из уравнения (3) можно получить формулы:
(4)
(5)
Магнитный
поток Ф зависит от тока возбуждения Iв,
создаваемого в обмотке возбуждения.
изменением тока возбуждения с помощью реостата в цепи обмотки возбуждения;
изменением тока якоря с помощью реостата в цепи обмотки якоря;
изменением напряжения U на зажимах якорной обмотки.
Чтобы изменить направление вращения двигателя на обратное (реверсировать двигатель), необходимо изменить направление тока в обмотке якоря или индуктора.
Механические характеристики электродвигателей постоянного тока
Рисунок 14
Механической характеристикой
двигателя называется зависимость
частоты вращения якоря n2 от
момента на валу M2 при
U = const и Iв =
const. Уравнение
(6) является уравнением механической
характеристики двигателя с параллельным
возбуждением.
Уравнение
(6) является уравнением механической
характеристики двигателя с параллельным
возбуждением.
Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 15).
Н а рисунке 16 изображен двигатель последовательного возбуждения. Якорная обмотка и обмотка возбуждения включены последовательно.
Рисунок 15
Рисунок 16
Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.
где k — коэффициент пропорциональности. Момент на валу двигателя пропорционален квадрату тока якоря.
Откуда
Механическая характеристика двигателя последовательного возбуждения является мягкой (рис. 17).
Рисунок 17
Уравнение механической характеристики двигателя последовательного возбуждения выглядит следующим образом:
С
увеличением нагрузки скорость двигателя
резко падает.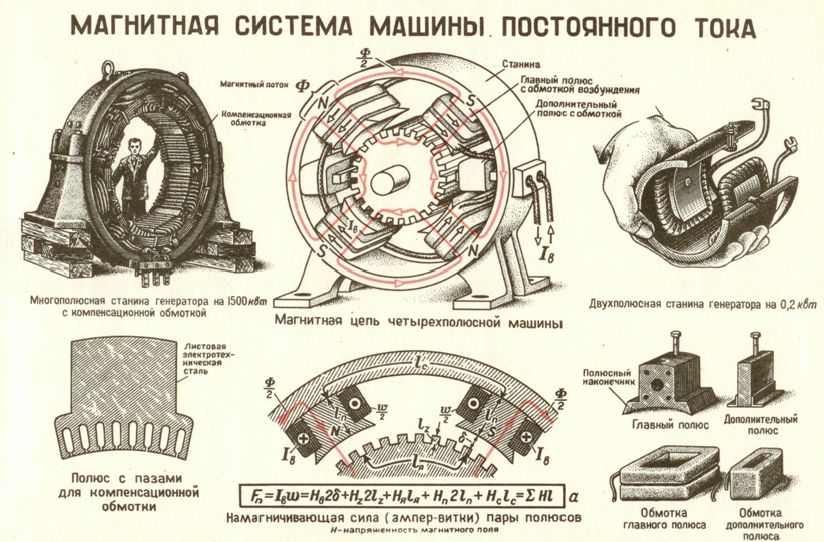 С
уменьшением нагрузки на валу двигатель
развивает очень большую частоту вращения.
Говорят, что двигатель идет вразнос.
Работа двигателя последовательного
возбуждения без нагрузки недопустима.
С
уменьшением нагрузки на валу двигатель
развивает очень большую частоту вращения.
Говорят, что двигатель идет вразнос.
Работа двигателя последовательного
возбуждения без нагрузки недопустима.
Различают следующие виды машин постоянного тока:
по наличию коммутации:
по типу переключателей тока:
по мощности:
микромашины — до 500Вт;
малой мощности — 0,5-10 кВт;
средней мощности — 10-200 кВт;
большой мощности — более 200 кВт.
в зависимости от частоты вращения:
тихоходные — до 300 об./мин.;
средней быстроходности — 300—1500 об./мин.;
быстроходные — 1500-6000 об./мин.;
сверхбыстроходные — более 6000 об./мин.
по расположению вала:
горизонтальные;
вертикальные.

Машина постоянного тока может работать в двух режимах: двигательном и генераторном.
Электродвигатель
Электродвигатели постоянного тока стоят почти на каждом автомобиле, это стартер, электропривод стеклоочистителя, вентилятор «печки» и др.
В роли индуктора выступает статор, на котором расположена обмотка. На неё подаётся постоянный ток, в результате чего вокруг неё создаётся постоянное магнитное поле. Обмотка ротора состоит из проводников, запитанных через коллектор. В результате на них действуют пары сил Ампера, которые вызывают вращающий момент. Направление сил определяется по правилу «буравчика». Однако этот вращающий момент способен повернуть ротор только на 180 градусов, после чего он остановится. Чтобы это предотвратить, используется щёточно-коллекторный узел, выполняющий роль переключателя полюсов и датчика положения ротора (ДПР).
Генератор
В
генераторе индуктором также
является статор,
создающий постоянное магнитное поле
между соответствующими полюсами. При
вращении ротора,
в проводниках обмотки якоря, перемещающихся
в магнитном поле, по закону электромагнитной
индукции наводится ЭДС, направление
которой определяется по правилу
правой руки.
Переменная ЭДС обмотки якоря выпрямляется
с помощью коллектора, через неподвижные
щетки, посредством которых обмотка
соединяется с внешней сетью.
При
вращении ротора,
в проводниках обмотки якоря, перемещающихся
в магнитном поле, по закону электромагнитной
индукции наводится ЭДС, направление
которой определяется по правилу
правой руки.
Переменная ЭДС обмотки якоря выпрямляется
с помощью коллектора, через неподвижные
щетки, посредством которых обмотка
соединяется с внешней сетью.
Armature & Field Control DC Motors
Drives AC для применения вентиляционного и насоса HVAC
22 августа 2012 г.Carotron, LLC Videos
. приводы обеспечивают возможность управления скоростью и крутящим моментом мощных двигателей постоянного тока в различных промышленных и других подобных приложениях. Управление скоростью может быть достигнуто с помощью приводов постоянного тока несколькими способами. На клеммы двигателя постоянного тока может быть подано напряжение, или к якорю может быть приложено внешнее сопротивление.
Другой метод заключается в изменении потока на полюс двигателя. Первые два метода включают регулировку якоря двигателя, а последний метод включает регулировку поля двигателя. Эти методы называются «управление якорем» и «управление полем».
Первые два метода включают регулировку якоря двигателя, а последний метод включает регулировку поля двигателя. Эти методы называются «управление якорем» и «управление полем».
Узнайте об основах управления двигателем
Что такое двигатель постоянного тока?А Постоянный ток — двигатель постоянного тока — это устройство, которое получает электрическую энергию и преобразует ее в механическую энергию. Они делают это через материал проводника, который проводит ток внутри и передает его на спиральные провода, называемые обмотками. Импульсный ток создает магнитные поля, которые взаимодействуют с магнитами на роторе.
Если магниты и поле притягиваются, двигатель вращается в одну сторону. И наоборот, два отталкивающих поля заставляют двигатель вращаться в противоположном направлении. Коммутатор — внутренний компонент — подает постоянный ток на обмотки, чтобы продолжать генерировать магнитные поля и вращать двигатель.
Двигатели постоянного тока входят в стандартную комплектацию промышленного оборудования благодаря двум уникальным характеристикам.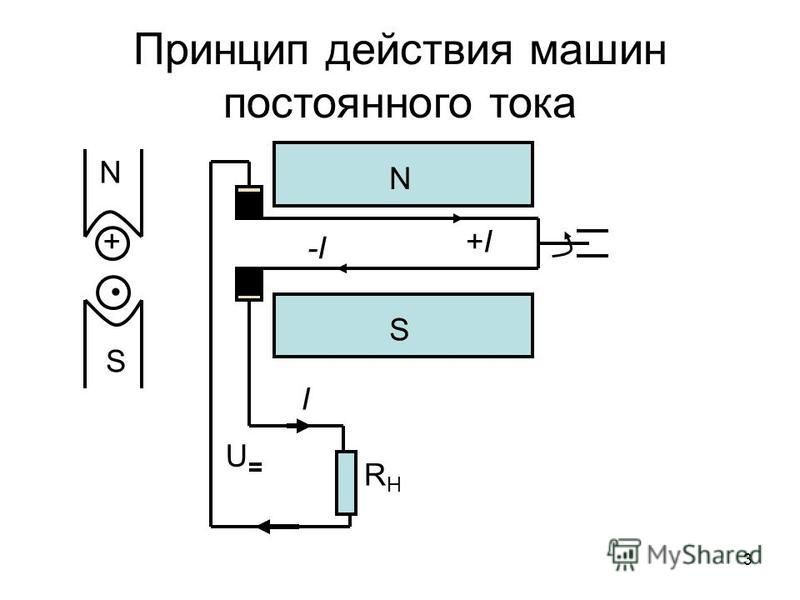 Эти двигатели могут запускаться, реверсироваться или останавливаться по требованию, что очень важно для производства. Они также поддерживают контроль скорости, что является еще одним необходимым условием для точной работы станка.
Эти двигатели могут запускаться, реверсироваться или останавливаться по требованию, что очень важно для производства. Они также поддерживают контроль скорости, что является еще одним необходимым условием для точной работы станка.
Для многих применений требуется регулировка скорости двигателя постоянного тока, что обеспечивает максимальную функциональность и производительность машины. Делать это преднамеренно и по мере необходимости требует контроля скорости. Операторы могут делать это вручную или полагаться на автоматизированные технологические устройства. Управление скоростью двигателя постоянного тока отличается от регулирования скорости, которое поддерживает постоянную скорость, несмотря на колебания нагрузки.
Регуляторы скорости бывают двух основных видов — управления якорем и управления полем. Изменения напряжения на клеммах или воздействия внешнего сопротивления выполняют функцию управления якорем.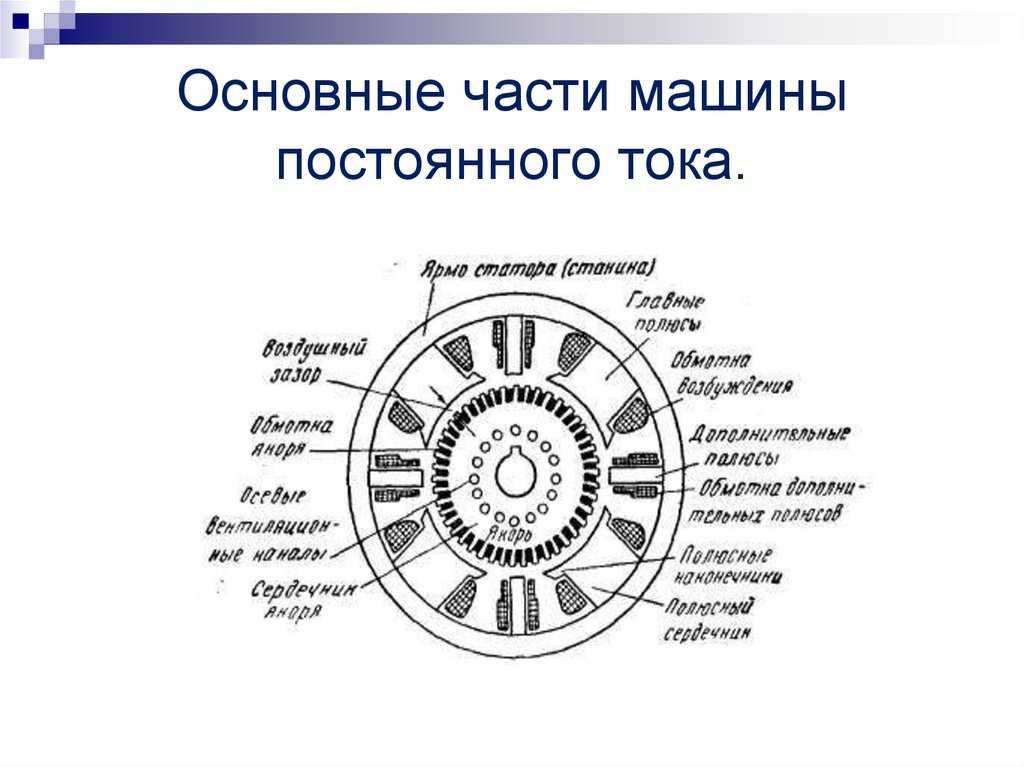 И наоборот, изменение магнитного потока является методом управления полем.
И наоборот, изменение магнитного потока является методом управления полем.
Работа двигателей постоянного тока основана на нескольких законах электричества. Закон Фарадея об электромагнетизме гласит, что проводник с током подвергается механической силе при встрече с магнитным полем. «Правило левой руки» Флеминга гласит, что движение проводника всегда перпендикулярно магнитному полю и току.
По закону Ленца возникающее электромагнитное поле (ЭДС) сопротивляется напряжению, создавая явление, называемое обратной ЭДС. Эта обратная ЭДС придает двигателям постоянного тока уникальную способность балансировать крутящий момент при различных нагрузках.
Управление якорем для двигателей постоянного тока При управлении якорем напряжение изменяется несколькими способами. Один из способов — реализовать сопротивление якоря, которое включает последовательное подключение переменного сопротивления к цепи якоря. Как только сопротивление увеличивается, ток, протекающий через цепь, уменьшается, а падение напряжения на якоре становится меньше, чем напряжение в сети. Это, в свою очередь, снижает скорость двигателя пропорционально приложенному напряжению. Метод управления сопротивлением якоря используется в приложениях, требующих изменения скорости двигателя в течение более коротких периодов времени, а не непрерывно. Другими методами управления якорем являются контроль напряжения якоря и контроль сопротивления шунта.
Как только сопротивление увеличивается, ток, протекающий через цепь, уменьшается, а падение напряжения на якоре становится меньше, чем напряжение в сети. Это, в свою очередь, снижает скорость двигателя пропорционально приложенному напряжению. Метод управления сопротивлением якоря используется в приложениях, требующих изменения скорости двигателя в течение более коротких периодов времени, а не непрерывно. Другими методами управления якорем являются контроль напряжения якоря и контроль сопротивления шунта.
Чтобы определить скорость двигателя постоянного тока, вам нужно чистое напряжение — напряжение питания плюс противо-ЭДС. Из этого числа вычтите ток якоря, умноженный на сопротивление якоря. Разделите этот результат на магнитный поток на полюс, чтобы найти скорость двигателя постоянного тока.
Преимущества двигателей постоянного тока с управлением якорем Управление якорем представляет собой систему с замкнутым контуром, тогда как управление полем представляет собой систему с разомкнутым контуром.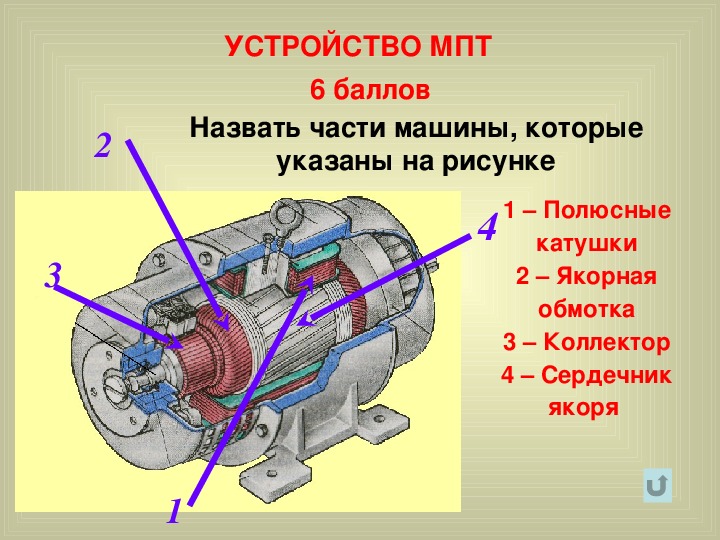 Замкнутые системы часто являются предпочтительным выбором для операторов и бизнес-лидеров, которые ищут стабильность и удобство автоматизированного процесса. Двигатели, управляемые якорем, обеспечивают почти непревзойденную точность и управляемость, а также широкий диапазон изменения скорости.
Замкнутые системы часто являются предпочтительным выбором для операторов и бизнес-лидеров, которые ищут стабильность и удобство автоматизированного процесса. Двигатели, управляемые якорем, обеспечивают почти непревзойденную точность и управляемость, а также широкий диапазон изменения скорости.
Дополнительные преимущества двигателей постоянного тока с управлением якорем включают:
- Постоянный ток возбуждения и крутящий момент: При использовании метода управления якорем уровни тока возбуждения и крутящего момента остаются постоянными на протяжении всего применения. Независимо от скорости двигателя, вы можете положиться на эти факторы.
- Быстрое и простое изменение скорости: Двигатели постоянного тока, управляемые якорем, известны своей исключительной регулировкой скорости, которая позволяет операторам изменять скорость по мере необходимости в обоих направлениях.
Хотя двигатели с управлением якорем быстродействующие и идеально подходят для кратковременных фиксированных процессов, у них есть несколько недостатков, которые следует учитывать при сравнении управления якорем и полем:
- Более высокие первоначальные затраты: Метод управления якорем часто дороже, чем метод управления полем.
- Низкая энергоэффективность: Одна из причин, по которой управление якорем чаще всего используется в течение более коротких промежутков времени, заключается в том, что при изменении скорости теряется большое количество энергии. Эта потеря мощности делает процесс менее энергоэффективным и более дорогостоящим в целом.

При использовании метода управления полем для двигателей постоянного тока поле ослабляется для увеличения скорости или может быть усилено для снижения скорости двигателя. Достижение скоростей, превышающих номинальную скорость, может быть достигнуто за счет включения переменного сопротивления последовательно цепи возбуждения, изменения сопротивления магнитной цепи или изменения приложенного напряжения двигателя к цепи возбуждения (при подаче постоянного напряжения на цепь возбуждения). цепь якоря).
Преимущества двигателей постоянного тока с управлением от поля В качестве системы с разомкнутым контуром метод управления полем идеально подходит для операторов, которым требуется экономичность, плавная работа и стабильная производительность. Двигатели постоянного тока с полевым управлением чаще используются для более длительных процессов из-за их надежности и удобства. В отличие от двигателей, управляемых якорем, управление полем обеспечивает скорость, превышающую нормальный диапазон.
Двигатели постоянного тока с полевым управлением чаще используются для более длительных процессов из-за их надежности и удобства. В отличие от двигателей, управляемых якорем, управление полем обеспечивает скорость, превышающую нормальный диапазон.
К основным преимуществам этого метода относятся:
- Низкие затраты: Метод управления полем является очень экономичной формой управления двигателем. Он прост в использовании и управлении, а более низкие эксплуатационные расходы делают его рентабельным в долгосрочной перспективе. Для производителей или инженеров с ограниченным бюджетом это идеальное решение.
- Минимальные потери мощности: Скорость двигателя постоянного тока, управляемого полем, изменяется за счет магнитного поля, а не якоря. В результате этот метод обычно тратит меньше энергии. Дополнительная энергоэффективность может сэкономить время и деньги, помогая окружающей среде.
Электродвигатели постоянного тока с полевым управлением просты и удобны, что делает их популярным выбором для операторов двигателей и производителей.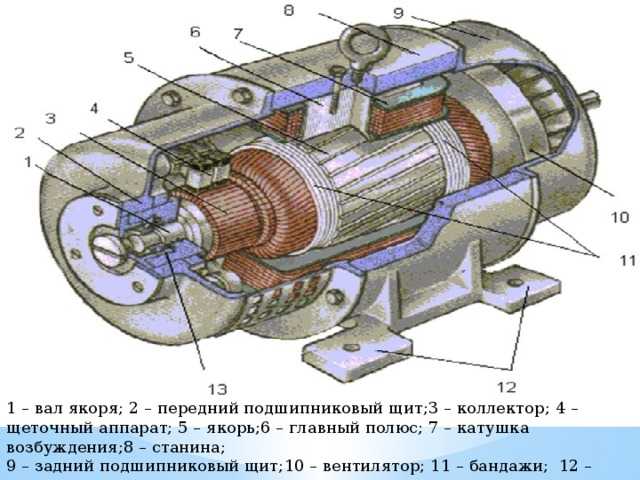 С другой стороны, есть определенные случаи, когда другой метод управления двигателем может быть более эффективным. К недостаткам полевого контроля относятся:
С другой стороны, есть определенные случаи, когда другой метод управления двигателем может быть более эффективным. К недостаткам полевого контроля относятся:
- Ограничения по скорости: Если ваше приложение требует, чтобы вы отрегулировали скорость двигателя ниже нормальной, вам может быть лучше выбрать метод управления якорем. Двигатели постоянного тока с полевым управлением могут работать только со скоростью, превышающей нормальную. Более высокие скорости также могут привести к меньшему крутящему моменту.
- Снижение стабильности: Метод управления полем позволяет операторам получать более высокие скорости, чем обычно. Тем не менее, его общий диапазон может быть снижен из-за отсутствия стабильности. С более слабым полем вы сможете безопасно превысить только определенные скорости.
Сравните несколько приводов постоянного тока, чтобы найти тот, который обеспечит эффективное и экономичное управление вашим двигателем постоянного тока.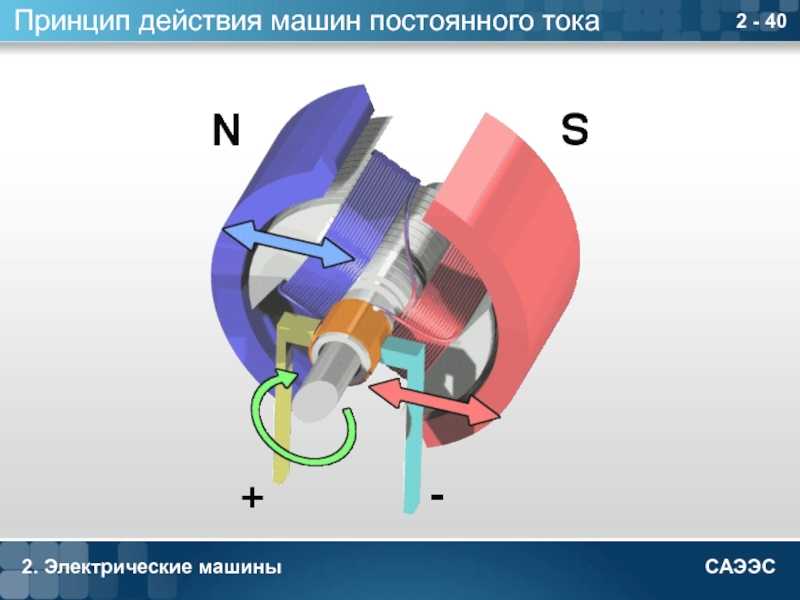 Приводы постоянного тока имеют специальные функции и возможности для удовлетворения различных потребностей. Приводы постоянного тока могут быть регенеративными или нерегенеративными, с различной мощностью, конструкциями крепления и т. д.
Приводы постоянного тока имеют специальные функции и возможности для удовлетворения различных потребностей. Приводы постоянного тока могут быть регенеративными или нерегенеративными, с различной мощностью, конструкциями крепления и т. д.
Руководство по применению систем управления
Другие типы управления скоростьюСуществуют различные способы управления скоростью двигателей в зависимости от конфигурации двигателя. Вот некоторые типичные для серийных двигателей:
- Метод контроля сопротивления якоря: Этот подход требует контроля сопротивления в соединении с источником питания. Чаще всего снижают скорость при небольших нагрузках.
- Управление шунтирующим якорем: В этом методе используется реостат, который изменяет подачу напряжения.
- Контроль напряжения на клеммах якоря: Этот метод основан на отдельном источнике напряжения с регулируемым входом.
- Метод отвода поля: При таком подходе вы уменьшаете поток поля за счет шунтирования вокруг ряда, чтобы снизить сопротивление и увеличить скорость. В результате вы получаете более высокую, чем обычно, скорость, которая увеличивается по мере уменьшения нагрузки.
- Управление полем с ответвлениями: Вы повышаете скорость, уменьшая количество витков обмотки возбуждения с помощью внешнего ответвления.
 В результате вы получаете более высокую, чем обычно, скорость, которая увеличивается по мере уменьшения нагрузки.
В результате вы получаете более высокую, чем обычно, скорость, которая увеличивается по мере уменьшения нагрузки.Методы регулирования скорости параллельных двигателей аналогичны. Для управления через якорь можно использовать регуляторы сопротивления или напряжения. При подходе управления полем в большинстве отраслей промышленности используются реостаты для уменьшения сопротивления вне нагрузки.
Свяжитесь с командой Carotron для получения помощи сегодняУ вас есть вопрос или вы не уверены, что вам нужно? Мы можем помочь! Свяжитесь с представителем заказчика или инженером Carotron, Inc. по телефону 1-888-286-8614, и мы рассмотрим вашу заявку и предложим подходящие компоненты для выполнения работы. Вы также можете связаться с нами онлайн, используя нашу форму.
Оставайтесь с нами на связи
Позвоните нам
1.
 803.286.8614
803.286.8614Факс
1.803.286.6063
Адрес
3204 Роки Ривер Роуд
Хит-Спрингс, Южная Каролина 29058
Все о шунтирующих двигателях постоянного тока
Электродвигатели принесли нам почти все современные удобства, позволив нам превратить электрическую энергию в физическое движение. Эти машины помогли нам создать такие чудеса, как автомобили, компьютеры, кондиционеры и многое другое, и все это благодаря разнообразию электродвигателей, доступных в промышленности. Двигатель постоянного тока — электродвигатель, в котором используется источник питания постоянного тока, такой как батарея, — является одной из наших самых старых, но наиболее широко используемых конструкций, и в этой статье будет рассмотрен один конкретный двигатель постоянного тока, шунтирующий двигатель постоянного тока. На первый взгляд может быть трудно увидеть уникальные свойства этого двигателя, но эта статья призвана помочь выделить эти различия и показать, почему инженеры могут предпочесть эту конструкцию другим моделям. Мы надеемся, что эта статья, изучая настройку, работу и технические характеристики шунтирующих двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при создании правильной машины для своего приложения.
Мы надеемся, что эта статья, изучая настройку, работу и технические характеристики шунтирующих двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при создании правильной машины для своего приложения.
Что такое коллекторный двигатель постоянного тока и как он работает?
Шунтирующий двигатель постоянного тока — это просто особый тип щеточного двигателя постоянного тока, поэтому будет полезно сначала объяснить основные принципы, общие для всех этих конструкций (похожее объяснение можно найти в нашей статье о двигателях постоянного тока с последовательной обмоткой). Рисунок 1 дает упрощенное представление о том, как работают двигатели постоянного тока, и показан ниже:
Рис. 1: Упрощенная принципиальная схема двигателей постоянного тока. Обратите внимание, что поле статора не включено в схему, так как его размещение зависит от того, как работает двигатель постоянного тока.
Все двигатели постоянного тока состоят из двух основных частей: статора — внешнего корпуса, содержащего поле статора, и ротора — вращающегося компонента, подключенного к источнику питания постоянного тока. Поле статора может состоять либо из настоящих постоянных магнитов, либо из проволочной обмотки (или «обмотки возбуждения», показанной на рис. 1), которые создают постоянное магнитное поле через узел ротора. Ротор состоит из якоря, обмоток якоря, выходного вала, коллекторов и щеток. Обмотка якоря представляет собой катушку проволоки, которая проходит через якорь или через пластины металла, направляющие обмотки якоря вокруг выходного вала. Эти якорные обмотки оканчиваются на кольцах коммутатора, которые механически отделены от источника постоянного тока (другими словами, они «парят» над выходным валом, ожидая, когда их толкнут щетки). Когда оператор запускает двигатель, щетки защелкиваются на кольцах коллектора и замыкают цепь на рис. 1, заставляя ток течь через щетки, кольца коллектора и обмотки якоря. При этом в якоре создается электромагнитное поле, противодействующее постоянному полю статора. Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном счете, полезную скорость/крутящий момент.
Поле статора может состоять либо из настоящих постоянных магнитов, либо из проволочной обмотки (или «обмотки возбуждения», показанной на рис. 1), которые создают постоянное магнитное поле через узел ротора. Ротор состоит из якоря, обмоток якоря, выходного вала, коллекторов и щеток. Обмотка якоря представляет собой катушку проволоки, которая проходит через якорь или через пластины металла, направляющие обмотки якоря вокруг выходного вала. Эти якорные обмотки оканчиваются на кольцах коммутатора, которые механически отделены от источника постоянного тока (другими словами, они «парят» над выходным валом, ожидая, когда их толкнут щетки). Когда оператор запускает двигатель, щетки защелкиваются на кольцах коллектора и замыкают цепь на рис. 1, заставляя ток течь через щетки, кольца коллектора и обмотки якоря. При этом в якоре создается электромагнитное поле, противодействующее постоянному полю статора. Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном счете, полезную скорость/крутящий момент.
Что такое шунтирующие двигатели постоянного тока и как они работают?
Теперь, когда мы показали общие принципы для всех двигателей постоянного тока, давайте взглянем на конкретное расположение шунтирующего двигателя постоянного тока, показанное ниже на рисунке 2:
Рис. 2: Принципиальная схема шунтирующих двигателей постоянного тока. Обратите внимание, что обмотка возбуждения подключена параллельно узлу ротора — это определяющая особенность шунтирующих двигателей постоянного тока.
Обмотка возбуждения, создающая постоянное магнитное поле в статоре, соединяется параллельно или параллельно с обмотками якоря в шунтирующих двигателях постоянного тока. Таким образом, для питания якоря и обмотки возбуждения используется один и тот же источник питания, а общий ток разделяется на два «параллельных» пути.
Обмотка возбуждения в шунтирующих двигателях постоянного тока состоит из множества витков тонкой проволоки, чтобы увеличить силу магнитного поля и ограничить ток через катушку. Таким образом, ток через катушку возбуждения уменьшается и, таким образом, увеличивается в якоре (помните, что при параллельном соединении ток распределяется). Больший ток в якоре создает явление, известное как обратная ЭДС — электродвижущая сила, создаваемая магнитным полем якоря, вращающимся через поле статора, — а обратная ЭДС служит для уменьшения тока через обмотку якоря.
Таким образом, ток через катушку возбуждения уменьшается и, таким образом, увеличивается в якоре (помните, что при параллельном соединении ток распределяется). Больший ток в якоре создает явление, известное как обратная ЭДС — электродвижущая сила, создаваемая магнитным полем якоря, вращающимся через поле статора, — а обратная ЭДС служит для уменьшения тока через обмотку якоря.
По мере увеличения скорости двигателя эта противо-ЭДС увеличивается (поскольку она пропорциональна скорости) и аналогичным образом уменьшается, если вращение якоря замедляется из-за увеличения нагрузки на вал. Это дает шунтирующим двигателям постоянного тока уникальную способность саморегулировать свою скорость, особенно когда на вал воздействует большая нагрузка, и поэтому они в просторечии известны как двигатели с постоянной скоростью. Таким образом, параллельные двигатели имеют низкий пусковой момент, но постоянную скорость; это противоположно двигателям постоянного тока с последовательным возбуждением, где их пусковой момент высок, но практически нет регулирования скорости (дополнительную информацию см. в нашей статье о двигателях постоянного тока с последовательным возбуждением). Они также обратимы простым изменением полярности катушки якоря или катушки возбуждения.
в нашей статье о двигателях постоянного тока с последовательным возбуждением). Они также обратимы простым изменением полярности катушки якоря или катушки возбуждения.
Полезно знать, на какие значения обращать внимание при выборе шунтирующего двигателя постоянного тока. В этой статье будут кратко рассмотрены некоторые общие спецификации, на которые следует обратить внимание, но знайте, что в большинстве спецификаций содержится гораздо больше информации, чем та, что представлена здесь.
Напряжение якоря/возбуждения
Из-за того, что обмотки якоря и обмотки возбуждения соединены параллельно, на каждый компонент приходится два отдельных напряжения (хотя и не на всю цепь; помните, что они используют один и тот же источник питания). В результате в большинстве спецификаций указаны два номинальных напряжения для шунтирующего двигателя постоянного тока, по одному на каждую катушку, часто с диапазонами. Например, шунтирующий двигатель может иметь напряжение возбуждения 220 В с максимальным значением до 500 В и напряжение якоря 440 В с максимальным значением до 600 В. Обратите внимание, что эти значения зависят от типоразмера и конструкции двигателя. Также обратите внимание, что двигатель постоянного тока никогда не следует использовать с источником питания, напряжение которого ниже его номинального напряжения, так как это снижает производительность и может привести к перегреву.
Например, шунтирующий двигатель может иметь напряжение возбуждения 220 В с максимальным значением до 500 В и напряжение якоря 440 В с максимальным значением до 600 В. Обратите внимание, что эти значения зависят от типоразмера и конструкции двигателя. Также обратите внимание, что двигатель постоянного тока никогда не следует использовать с источником питания, напряжение которого ниже его номинального напряжения, так как это снижает производительность и может привести к перегреву.
Мощность и базовая скорость
Поскольку эти двигатели считаются двигателями с постоянной скоростью, обычно в спецификации указывается базовая скорость, а также соответствующая мощность (в л.с. или кВт). Эти значения показывают, что двигатель может перемещать и как быстро он может перемещать его, хотя двигатели постоянного тока с параллельным подключением могут регулировать свою скорость даже при изменении нагрузки (в пределах безопасных допусков).
Размер/размер рамы
Существуют стандартные размеры рамы, установленные NEMA, чтобы облегчить покупателю замену между продавцами двигателей, но обычно размеры двигателя всегда указываются, если они не стандартизированы. Размер рамы даст разработчику представление о том, как двигатель подойдет для любого конкретного применения, и дает приблизительное представление о том, насколько мощным будет двигатель (хотя размер электродвигателя может ввести в заблуждение, поэтому будьте осторожны).
Размер рамы даст разработчику представление о том, как двигатель подойдет для любого конкретного применения, и дает приблизительное представление о том, насколько мощным будет двигатель (хотя размер электродвигателя может ввести в заблуждение, поэтому будьте осторожны).
Жизнь щетки
Поскольку в шунтирующем двигателе постоянного тока для подключения источника питания к вращающемуся якорю используются щетки, они естественным образом со временем изнашиваются. Большинство двигателей постоянного тока имеют срок службы щеток (в часах), поэтому операторы могут записывать, как долго щетки использовались и когда их нужно заменить. Очень важно обслуживать эти двигатели, заменяя щетки при необходимости, иначе они могут выйти из строя или перестать работать.
Применение и критерии выбора
В отличие от серийных двигателей постоянного тока, шунтирующие двигатели постоянного тока лучше всего подходят для приложений с постоянной скоростью благодаря своей конструкции с обратной связью. Они могут поддерживать точное число оборотов и крутящий момент даже при различных условиях нагрузки, что делает их полезными для деревообрабатывающего оборудования, шлифовальных станков или любого другого вращающегося электроинструмента, где пользователь будет толкать против вращения. Обратите внимание, что эти двигатели имеют низкий пусковой крутящий момент, поэтому эти двигатели не могут быть подключены к большой нагрузке при запуске и должны ожидать использования на номинальной скорости. Они также немного теряют скорость при большой нагрузке, так как ни один электродвигатель не работает в идеальных условиях, и все испытывают потери.
Они могут поддерживать точное число оборотов и крутящий момент даже при различных условиях нагрузки, что делает их полезными для деревообрабатывающего оборудования, шлифовальных станков или любого другого вращающегося электроинструмента, где пользователь будет толкать против вращения. Обратите внимание, что эти двигатели имеют низкий пусковой крутящий момент, поэтому эти двигатели не могут быть подключены к большой нагрузке при запуске и должны ожидать использования на номинальной скорости. Они также немного теряют скорость при большой нагрузке, так как ни один электродвигатель не работает в идеальных условиях, и все испытывают потери.
Эти двигатели очень просты в установке, с возможностью работы с регуляторами скорости. Чаще всего они используются в вышеупомянутых электроинструментах, а также в автомобильных стеклоочистителях, автомобильных окнах, компьютерных вентиляторах и т. д. Хотя изначально шунтирующие двигатели постоянного тока не такие мощные, как их родственники с последовательной обмоткой, они не колеблются при обеспечении своей механической мощности, обеспечивая пользователям постоянство по сравнению с чистой выходной мощностью.