
Блок управления коллекторными двигателями BMD
Контроллер коллекторного двигателя BMD
Контроллер коллекторного двигателя BMD
| Напряжение питания Uпит, В | 12…24 |
|---|---|
| Максимальный ток двигателя, А | 12 |
| Защита от короткого замыкания, А | 30 |
| Защита двигателя от перегрузки, А | 16 |
| Максимальное напряжение на двигателе | 0,98 Uпит |
| Диапазон регулировки скорости двигателя | в 10-20 раз, (в зависимости от модели двигателя) |
Скачать описание
Заказать
Снят с производства
Описание блоков управления коллекторным двигателем постоянного тока BMD
Контроллеры BMD разработаны для управления работой коллекторных двигателей постоянного тока с напряжением питания до 24В. Блок управляет скоростью и направлением вращения мотор-редуктора постоянного тока с номинальным током до 12А.
Контроллеры серии BMD сняты с производства, взамен поставляются контроллеры BMD-20DIN.
Блок управляет скоростью и направлением вращения мотор-редуктора постоянного тока с номинальным током до 12А.
Контроллеры серии BMD сняты с производства, взамен поставляются контроллеры BMD-20DIN.
Предусмотрен аналоговый задатчик скорости — внешний сигналом (0…+5)В или встроенный потенциометр. Запуск двигателя осуществляется по заднему фронту управляюшего сигнала START/STOP, реверс выполняется по изменению уровня управляющего сигнала DIR.
Управление скоростью:
- аналоговым сигналом
- напряжение: 0 — 5В;
- сопротивление: 720 Ом;
- встроенным потенциометром
Управление направлением
Направление вращения в момент запуска зависит от полярности подключения двигателя к блоку. В ходе работы направление вращения меняется сигналом «Направление» — типа сухой контакт.
Управление коллекторным двигателем постоянного тока с электромагнитным тормозом.
Габаритные размеры блоков управления коллекторным двигателем постоянного тока BMD
Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Управление коллекторным двигателем и мотор-редуктором постоянного тока
Коллекторный электродвигатель постоянного тока довольно прост в вопросе функционирования и является достаточно универсальным в своем роде, однако, при возникновении необходимости регулировки скорости вращения вала могут возникнуть проблемы. Такие двигатели имеют три основных недостатка – довольно небольшой момент на низких скоростях вращения, высокий уровень помех и малый ресурс. Помимо скорости, есть и другие параметры требующие управления – плавный старт и остановка, реверс, работа с внешними сигналами (датчиками).
Такие двигатели имеют три основных недостатка – довольно небольшой момент на низких скоростях вращения, высокий уровень помех и малый ресурс. Помимо скорости, есть и другие параметры требующие управления – плавный старт и остановка, реверс, работа с внешними сигналами (датчиками).
Регулировка скорости коллекторного двигателя постоянного тока
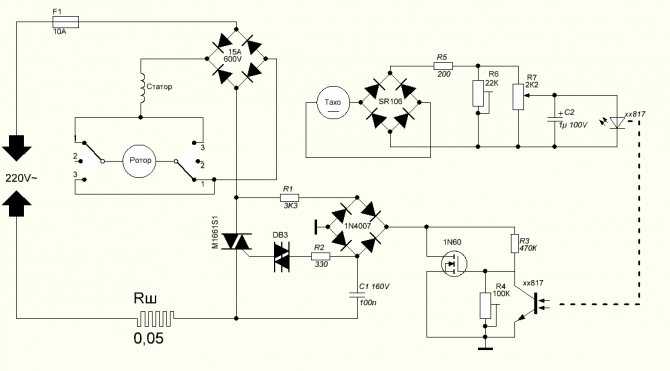
Самым распространенным решением данного вопроса является использование метода широтно-импульсной модуляции (ШИМ). Он заключается в подаче на двигатель однополярных прямоугольных импульсов. Постоянная составляющая, которая образуется в результате подачи таких сигналов, рассматривается двигателем как интегратор и соответственно, влияет на скорость. Популярность метода обусловлена достаточной простотой, тем фактом что при его использовании не обязательно «цеплять» большие радиаторы для отвода тепла, и достаточно высоким КПД.
Менее распространено изменение значения подаваемого напряжение для регулировки скорости электродвигателя.
Регулировка старта и остановки (плавный пуск и торможение двигателя)
Эта регулировка необходима для исключения негативных составляющих при возникновении ударных моментов при запуске, и, как следствие, продления срока службы электродвигателя (исключение его перегревания и, как следствие, нарушение функционирования). Для этого используется фазовый метод, который заключается в постепенном увеличении питающего напряжения до номинала. При помощи него плавно увеличивается ток в обмотках, что исключает возникновение резкого переходного процесса срезкой просадкой напряжения. Данный способ отличается своей дешевизной и надежностью.
Управление направлением вращения двигателя, реверса
Сам по себе, реверс — это изменение направления вращения без предварительной остановки двигателя, которое можно добиться несколькими путями. Одним из способов, является статический, а именно – изменение полярности на выходе преобразователя в обмотке якоря. Этот способ не всегда удобен, так как обуславливает наличие большой постоянной времени обмотки возбуждения. Векторное управление, происходит за счет применения датчика обратной связи. В двигателях постоянного тока реверсирование достигается двумя путями – изменением полярности на зажимах обмотки якоря, в результате чего наступает торможение благодаря противотоку, а затем пуск в обратную сторону – реверс. Либо используется изменение полярности напряжения на зажимах обмотки возбуждения – процесс и результат тот же что в первом случае.
Контроллер для управления коллекторным двигателем постоянного тока
Чтобы решить все задачи по управлению двигателями постоянного тока наиболее удачным решением является использование специализированного контроллера или микроконтроллера. Использование микроконтроллера — самый оптимальный вариант, в случае, если есть возможность самостоятельной доработки схемы управления. В случае же, когда требуется готовое решение для быстрого внедрения, лучше всего использовать готовый контроллер для управления двигателем. Готовый контроллер подразумевает регулирование скорости двигателя, выбор направления вращения вала или осуществление реверса. По заданным условиям реализуется плавный разгон и торможение. Наиболее востребованными опциями являются работа с внешними датчиками и потенциометрами, дистанционное управление, передача данных с использованием промышленных интерфейсов (RS-485, Etherned, Profibus и другие).
Использование микроконтроллера — самый оптимальный вариант, в случае, если есть возможность самостоятельной доработки схемы управления. В случае же, когда требуется готовое решение для быстрого внедрения, лучше всего использовать готовый контроллер для управления двигателем. Готовый контроллер подразумевает регулирование скорости двигателя, выбор направления вращения вала или осуществление реверса. По заданным условиям реализуется плавный разгон и торможение. Наиболее востребованными опциями являются работа с внешними датчиками и потенциометрами, дистанционное управление, передача данных с использованием промышленных интерфейсов (RS-485, Etherned, Profibus и другие).
Что такое коммутатор? — Советы по управлению движением
Вы здесь: Главная / Двигатели / Двигатели постоянного тока / Что такое коммутатор?
Даниэль Коллинз Оставить комментарий
Принцип работы двигателя постоянного тока основан на взаимодействии между магнитным полем вращающегося якоря и магнитным полем неподвижного статора.![]()
Основная цель коммутации — обеспечить, чтобы крутящий момент, действующий на якорь, всегда был в одном направлении. Напряжение, создаваемое в якоре, носит переменный характер, а коммутатор преобразует его в постоянный ток. Проще говоря, коммутатор включает и выключает катушки, чтобы контролировать, в каком направлении указывают электромагнитные поля. С одной стороны катушки электричество всегда должно течь «от себя», а с другой стороны электричество всегда должно течь «навстречу». Это гарантирует, что крутящий момент всегда создается в одном и том же направлении. В противном случае катушка повернется на 180 градусов в одну сторону, а затем изменит направление.
Проще говоря, коммутатор включает и выключает катушки, чтобы контролировать, в каком направлении указывают электромагнитные поля. С одной стороны катушки электричество всегда должно течь «от себя», а с другой стороны электричество всегда должно течь «навстречу». Это гарантирует, что крутящий момент всегда создается в одном и том же направлении. В противном случае катушка повернется на 180 градусов в одну сторону, а затем изменит направление.
Отличное визуальное представление того, как ток переключается из-за положения катушек и щеток, см. в этой статье Университета Юты.
Сам коммутатор представляет собой разъемное кольцо, обычно изготовленное из меди, причем каждый сегмент кольца прикреплен к каждому концу катушки якоря. Если якорь имеет несколько катушек, коммутатор также будет иметь несколько сегментов — по одному на каждый конец каждой катушки. Подпружиненные щетки расположены с каждой стороны коммутатора и соприкасаются с коммутатором при его вращении, снабжая сегменты коммутатора и соответствующие катушки якоря напряжением.
Когда щетки проходят через зазоры в коммутаторе, подаваемый электрический заряд переключает сегменты коммутатора, что меняет электрическую полярность катушек якоря. Это переключение полярности в катушках поддерживает вращение якоря в одном направлении. Напряжение между щетками колеблется по амплитуде между нулем и максимальным значением, но всегда сохраняет одну и ту же полярность.
Как упоминалось ранее, коммутатор состоит из сегментов, которые изолированы друг от друга. Когда щетки переходят от одного сегмента к другому, наступает момент, когда щетки соприкасаются с обоими сегментами одновременно. Это называется нейтральной плоскостью, и в этой точке индуцированное напряжение равно нулю. В противном случае щетки замкнули бы концы катушки вместе и вызвали искрение из-за высокого напряжения.
Термин «щетки» был придуман на заре двигателей постоянного тока, когда они были сделаны из жил медной проволоки.
 Эти устройства требовали частой замены и повреждали коллекторные кольца. В современных двигателях постоянного тока обычно используются угольные щетки, которые медленнее изнашиваются и меньше повреждают коллектор.
Эти устройства требовали частой замены и повреждали коллекторные кольца. В современных двигателях постоянного тока обычно используются угольные щетки, которые медленнее изнашиваются и меньше повреждают коллектор.Важно отметить, что приведенное выше обсуждение относится к традиционным коллекторным двигателям постоянного тока, которые коммутируются механически. Бесщеточные двигатели постоянного тока также требуют коммутации, но для бесщеточных конструкций коммутация осуществляется электронным способом с помощью энкодера или датчиков Холла, которые отслеживают положение ротора, чтобы определить, когда и как подавать питание на катушки.
Автор изображения: Groschopp, Inc. Область управления движением обычно не известна своими громкими прорывами или быстрыми разработками. Конструкции двигателей, как правило, развиваются медленно, и инженеры по понятным причинам проявляют осторожность, когда дело доходит до изменения проверенных временем подходов. Поле-ориентированное управление является значительным улучшением по сравнению со стандартным подходом для бесщеточных двигателей постоянного тока с трапециевидной коммутацией на основе Холла и имеет преимущество в диапазоне скоростей по сравнению с более сложной техникой синусоидальной коммутации. Для асинхронных двигателей переменного тока FOC является значительным улучшением по сравнению со стандартными методами привода с регулируемой скоростью и является двоюродным братом векторного управления потоком, который в некоторой степени похож на метод управления недорогими трехфазными асинхронными двигателями переменного тока, чтобы заставить их работать так, как если бы они были более дорогие бесколлекторные двигатели постоянного тока. По сравнению с другими типами серводвигателей, такими как щеточные двигатели постоянного тока, которые до сих пор используются в ряде важных приложений, бесщеточные асинхронные двигатели постоянного и переменного тока обеспечивают большую удельную мощность, намного большую надежность и, в случае асинхронного двигателя переменного тока, более низкую Стоимость. Чтобы получить полный доступ к этим возможностям, дизайнеры движения и инженеры используют платформы быстрых алгоритмов в виде DSP (цифровых сигнальных процессоров) и специализированных микропроцессоров для повышения производительности и эффективности. В бесщеточных двигателях постоянного тока более высокая производительность означает более плавное движение и большую рабочую скорость. Потенциал асинхронных двигателей переменного тока еще более захватывающий. По сравнению с простым управлением «все включено/выключено», FOC означает, что двигатели могут работать более эффективно, иметь более оптимальные размеры и эксплуатироваться с меньшим выделением тепла. С точки зрения создания крутящего момента хорошей рабочей моделью для большинства двигателей является простой стержневой магнит. Стержневой магнит вращается вокруг своего центра (моделируя ротор двигателя) и взаимодействует с магнитными полями, создаваемыми в статоре фиксированными неподвижными катушками. В бесколлекторных двигателях постоянного тока магнитное поле ротора создается магнитами, установленными непосредственно на роторе. Для асинхронных двигателей переменного тока магнитное поле ротора создается за счет индукции (отсюда и название двигателя) из магнитных полей в статоре. Направление этого магнитного поля, в отличие от бесщеточного двигателя постоянного тока, изменяется в зависимости от нескольких факторов, включая частоту и ток возбуждения статора, скорость вращения ротора и крутящий момент двигателя. Обмотки статора для бесколлекторных двигателей постоянного тока обычно имеют трехфазную конфигурацию, как и обмотки для асинхронных двигателей переменного тока, используемых с методами FOC. В частности, для асинхронных двигателей переменного тока стоит отметить, что также используются другие конфигурации обмоток, в частности, однофазный асинхронный двигатель переменного тока. Этот двигатель является рабочей лошадкой, используемой в большинстве семейных кондиционеров, холодильников, стиральных и сушильных машин, но он не подходит для самых передовых методов векторного управления, поскольку обмотки статора не могут управляться по отдельности. В любом случае три фазы статора расположены на расстоянии 120 электрических градусов друг от друга. Это сумма сил, создаваемых этими тремя фазами, которая в конечном итоге создает полезное вращение двигателя. В зависимости от того, как сфазированы отдельные магнитные катушки, они могут взаимодействовать, создавая силу, которая не создает вращательный момент, или они могут создавать силу, которая вызывает вращение. Хитрость в создании вращения состоит в том, чтобы максимизировать Q (квадратурный) и минимизировать D (прямой) крутящий момент. В случае с бесколлекторным двигателем постоянного тока это, по крайней мере теоретически, несложно, потому что в бесколлекторных двигателях постоянного тока магниты установлены непосредственно на роторе. Таким образом, если угол ротора измеряется с помощью датчика Холла или датчика положения, направление магнитного поля от ротора известно. Все становится более интересным для приложений управления скоростью и крутящим моментом, где предпринимаются попытки управления без датчиков. Поскольку не существует прямых механических измерений положения ротора, угол должен быть выведен из профиля напряжения противо-ЭДС на трех обмотках. В случае асинхронного двигателя переменного тока используется аналогичный подход, однако из-за дополнительного требования поддерживать некоторую величину индуктивного потока сила D не приводится к нулю, а вместо этого приводится к небольшому постоянному значению, характерному для мотор. Кроме того, измерения положения ротора с помощью датчиков Холла или энкодера недостаточно для определения угла магнитного поля ротора, поскольку оно не сообщает нам эффективного угла магнитного поля, создаваемого ротором. Напомним, что это магнитное поле индуцируется и поэтому непрерывно изменяется. Эта разница между положением ротора и магнитным углом ротора называется углом скольжения. Чем больше фактический крутящий момент двигателя, тем больше величина проскальзывания и, следовательно, тем больше компенсирующий крутящий момент двигателя. Для типов приложений, в которых обычно используется индукция переменного тока, таких как кондиционеры, стиральные машины, сушилки и т. д., скорость двигателя с уменьшенным скольжением не является проблемой. Но для приложений позиционирования или для работы двигателя с максимальной эффективностью это скольжение должно явно контролироваться. Есть несколько способов сделать это, но все они требуют измерения или оценки индуцированного ротором электрического поля. Еще раз, распространенный способ добиться этого — использовать методы обратной ЭДС. Другой популярный подход известен как управление вектором потока, при котором измеряется механический угол ротора и делается попытка получить магнитный угол ротора алгоритмически, используя оценки различных характеристик двигателя. Управление, ориентированное на поле, стало важным подходом к управлению/коммутации бесколлекторных двигателей постоянного тока и становится таковым также и для асинхронных двигателей переменного тока, поскольку оно обеспечивает широкий диапазон используемых скоростей двигателя. Поучительно сравнить FOC с ранее наиболее распространенным методом для бесколлекторных двигателей постоянного тока, синусоидальной коммутацией. На рис. 2 (ниже) показаны схемы управления как для синусоидальной коммутации, так и для управления по полю. При синусоидальном подходе к управлению команда крутящего момента «векторизуется» с помощью синусоидальной справочной таблицы, тем самым вырабатывая отдельную команду для каждой обмотки двигателя. По мере продвижения ротора угол обзора увеличивается в натуральной форме. Как только векторизованная фазовая команда сгенерирована, она передается в токовую петлю, по одной для каждой обмотки, которая пытается поддерживать фактический ток обмотки на желаемом значении тока. Важной особенностью этого подхода является то, что по мере увеличения частоты вращения двигателя возрастает сложность поддержания желаемого тока. Это связано с тем, что токовая петля напрямую «видит» частоту вращения, и любое отставание в токовой петле, определенное количество которого неизбежно, приводит к расхождению между желаемым крутящим моментом статора и фактическим. Это отставание, незначительное при низких скоростях вращения, создает увеличивающееся количество D (нежелательного) крутящего момента при более высоких скоростях вращения, что приводит к уменьшению доступного крутящего момента. Схема управления для подхода управления, ориентированного на поле, отличается тем, что токовая петля возникает без ссылки на вращение двигателя. То есть независимо от вращения двигателя. В подходе FOC есть две фактические токовые петли: одна для крутящего момента Q и одна для крутящего момента D. Контур крутящего момента Q приводится в действие требуемым пользователем крутящим моментом от сервоконтроллера. Хитрость, позволяющая выполнить всю эту работу, заключается в интенсивных математических операциях преобразования, известных как преобразования Парка и Кларка , которые преобразуют векторизованный фазовый угол в систему отсчета D и Q с разыменованной ссылкой. Это делается дважды: один раз для преобразования выходных данных контуров управления D и Q в команду трехфазного двигателя и один раз для преобразования измерения угла ротора обратно в кадры D и Q. Хотя об этих преобразованиях известно уже много лет, их практическая реализация в бесколлекторных асинхронных приводах постоянного и переменного тока ждала появления дешевых, высокопроизводительных цифровых сигнальных процессоров и микропроцессоров. Теперь, когда они доступны, асинхронные двигатели переменного тока, в которых используется метод FOC, могут развивать КПД двигателя более 85% по сравнению с примерно 60% для неориентированных на поле подходов. Практически говоря, ваш выбор двигателя и усилителя часто определяет способ управления, который вы будете использовать. Если для позиционирования используется бесщеточный двигатель постоянного тока, то бессенсорное управление не подходит. Вам понадобится энкодер и, скорее всего, датчик Холла. Если вы хотите получить максимальную производительность от вашего двигателя, вы будете тяготеть к управлению, ориентированному на поле. Однако, если вы не готовы собрать свой собственный усилитель (что для большинства является сложной задачей), вам придется приобрести дисковод со встроенной функцией. В этой конфигурации привод обычно включает высокоуровневые функции управления движением, такие как генерация профиля, контур сервопривода положения и входы и выходы в стиле ПЛК. Если вы используете карточный подход, который вы приобрели или который вы разработали самостоятельно, ваши возможности по внедрению ориентированного на поле управления ограничены. Это связано с тем, что большинство готовых усилителей вводят аналоговый управляющий сигнал +/- 10 Вольт и не обеспечивают управление, ориентированное на поле. Те, которые это делают, как правило, дороги, потому что они включают в себя множество функций, которые вы не будете использовать, имея отдельную карту движения. Однако есть и хорошие новости: ряд поставщиков предлагают синусоидальное управление коммутацией. Это можно сделать с помощью карты управления движением путем вывода двух аналоговых сигналов +/- 10 В, представляющих требуемый ток фаз A и B. Если вы используете бесколлекторные двигатели постоянного тока для устройств управления скоростью, например, в центрифугах, ленточных накопителях или других устройствах без позиционирования, у вас есть несколько вариантов конструкции. Бессенсорное управление, безусловно, возможно, хотя приводы, которые предлагают безсенсорное ориентированное на поле управление, все еще редки. Более распространены приводы без датчиков, которые обеспечивают функцию коммутации, подобную синусоиде. Их можно приобрести на уровне IC или на уровне привода. Если вы работаете с асинхронными двигателями переменного тока, вы, вероятно, разрабатываете приложения для управления скоростью или крутящим моментом, а не для приложений позиционирования. Много обсуждаемых в технических журналах практических примеров использования асинхронных двигателей переменного тока для позиционирования встречаются редко, за исключением некоторых специализированных областей, таких как приводы очень высокой мощности. В любом случае у вас есть выбор, но обычно он сводится к подходу «сделай сам» или подходу «купи диск». Если вы решите купить привод, у вас будет широкий выбор уровней производительности, начиная с простых инверторов управления скоростью и заканчивая очень сложными приводами, ориентированными на поле, и приводами с вектором потока. Если вы решите создать собственную плату контроллера или усилитель, простое регулирование скорости не составит труда, если вы знакомы с базовой конструкцией инвертора и методами переключения MOSFET или IGBT. Для более продвинутых конструкций вы можете обратиться к доступным готовым ИС для выполнения ориентированного на поле управления асинхронными двигателями переменного тока. Развитие методов управления движением, растущий спрос на энергоэффективность и доступные недорогие микропроцессоры в совокупности значительно подняли планку производительности бесколлекторных асинхронных двигателей постоянного и переменного тока. Техники коммутации и управления двигателем
 Однако в последнее время наблюдается активная деятельность по использованию передовых методов управления током, особенно полевого управления (FOC). Этот сложный математический метод управления бесщеточными асинхронными двигателями постоянного и переменного тока стал основным направлением в отрасли управления движением из-за его потенциала для повышения производительности и снижения энергопотребления.
Однако в последнее время наблюдается активная деятельность по использованию передовых методов управления током, особенно полевого управления (FOC). Этот сложный математический метод управления бесщеточными асинхронными двигателями постоянного и переменного тока стал основным направлением в отрасли управления движением из-за его потенциала для повышения производительности и снижения энергопотребления. Фактически, многие поставщики используют эти два термина как синонимы.
Фактически, многие поставщики используют эти два термина как синонимы. Это также позволяет использовать такие функции, как реверс направления, и может позволить отказаться от внешнего оборудования, такого как тормоза или сцепления. Учитывая, что 60–65% всей энергии в США используется для привода электродвигателей, неудивительно, что рынок все чаще требует более эффективных двигателей.
Это также позволяет использовать такие функции, как реверс направления, и может позволить отказаться от внешнего оборудования, такого как тормоза или сцепления. Учитывая, что 60–65% всей энергии в США используется для привода электродвигателей, неудивительно, что рынок все чаще требует более эффективных двигателей. Магнитное притяжение
 Эти два разных вида силы известны как квадратурная (Q) и прямая (D), при этом полезные квадратурные силы (не путать со схемой квадратурного кодирования для устройств обратной связи по положению) действуют перпендикулярно оси полюса ротора, а Прямые силы, не создающие крутящего момента, действуют параллельно оси полюса ротора. Рисунок 1 показывает это.
Эти два разных вида силы известны как квадратурная (Q) и прямая (D), при этом полезные квадратурные силы (не путать со схемой квадратурного кодирования для устройств обратной связи по положению) действуют перпендикулярно оси полюса ротора, а Прямые силы, не создающие крутящего момента, действуют параллельно оси полюса ротора. Рисунок 1 показывает это. Хотя это и не тривиально, в наши дни управление обратной ЭДС довольно распространено. Помните, однако, что противо-ЭДС требует, чтобы двигатель вращался, поэтому она не подходит для приложений позиционирования, которые должны удерживаться в устойчивом положении.
Хотя это и не тривиально, в наши дни управление обратной ЭДС довольно распространено. Помните, однако, что противо-ЭДС требует, чтобы двигатель вращался, поэтому она не подходит для приложений позиционирования, которые должны удерживаться в устойчивом положении.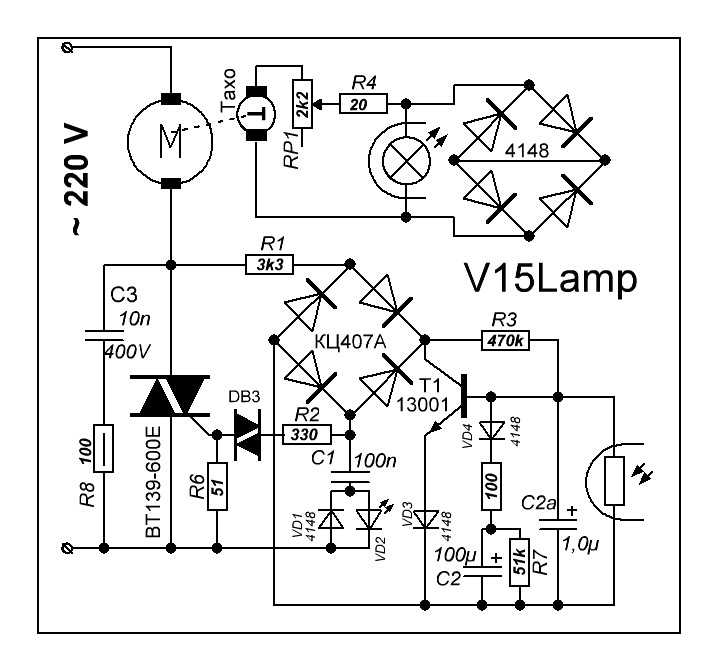 Это равновесие мало чем отличается от того, как работает гидростатическая трансмиссия. Чем больше разница в скорости между двигателем и колесами, тем больше крутящий момент, создаваемый трансмиссией. Это означает, что скорость вращения двигателя будет меньше частоты вращения статора.
Это равновесие мало чем отличается от того, как работает гидростатическая трансмиссия. Чем больше разница в скорости между двигателем и колесами, тем больше крутящий момент, создаваемый трансмиссией. Это означает, что скорость вращения двигателя будет меньше частоты вращения статора.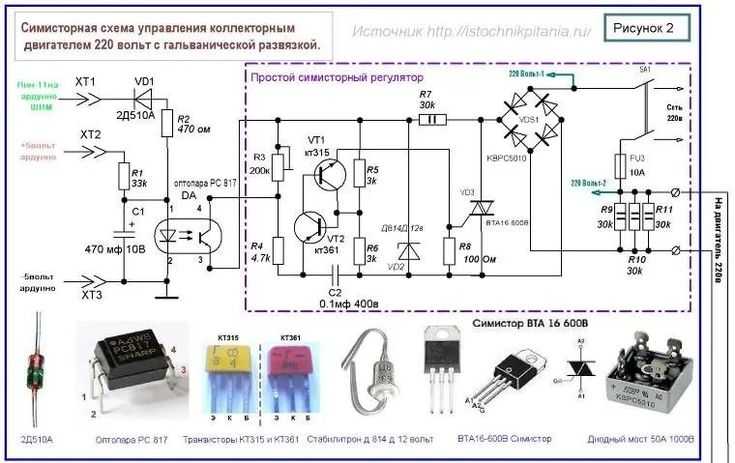
Мечты об управлении, ориентированном на поле
 Контур D управляется входной командой, равной нулю, чтобы свести к минимуму нежелательную составляющую прямого крутящего момента.
Контур D управляется входной командой, равной нулю, чтобы свести к минимуму нежелательную составляющую прямого крутящего момента.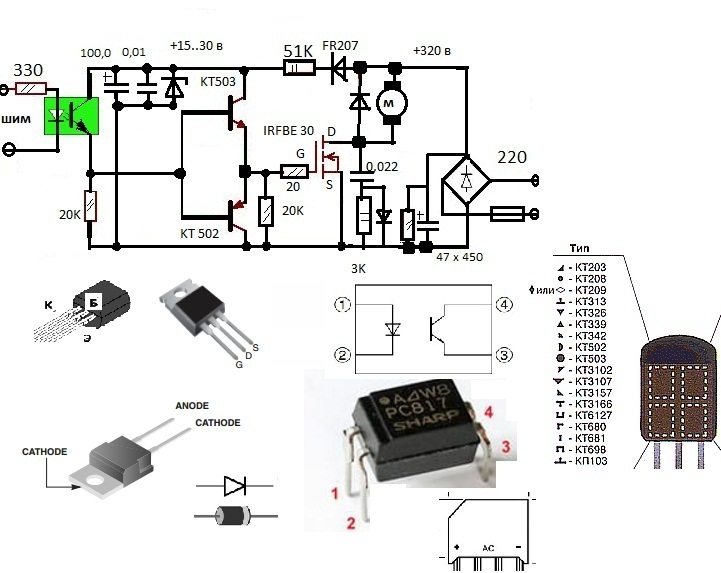 Для сравнения, бесщеточные двигатели, в которых используется метод FOC, могут достигать еще более высокой эффективности до 95%. Синусоидальная коммутация для бесколлекторных двигателей постоянного тока также работает очень эффективно, но не так эффективно, как FOC в самом высоком диапазоне скоростей двигателя.
Для сравнения, бесщеточные двигатели, в которых используется метод FOC, могут достигать еще более высокой эффективности до 95%. Синусоидальная коммутация для бесколлекторных двигателей постоянного тока также работает очень эффективно, но не так эффективно, как FOC в самом высоком диапазоне скоростей двигателя. Где магнитное поле встречается с дорогой
 Существует ряд компактных одноосевых приводов, которые предлагают управление на основе Холла, синусоидальное или ориентированное на поле. Эти приводы обычно располагаются на шине RS/485, CANbus, Ethernet или другой последовательной шине. Все, что вам нужно сделать, это подключить двигатель и питание и отправить команды.
Существует ряд компактных одноосевых приводов, которые предлагают управление на основе Холла, синусоидальное или ориентированное на поле. Эти приводы обычно располагаются на шине RS/485, CANbus, Ethernet или другой последовательной шине. Все, что вам нужно сделать, это подключить двигатель и питание и отправить команды. Для многих приложений синусоидальная коммутация обеспечивает значительное улучшение по сравнению с 6-ступенчатой коммутацией на основе Холла и по-прежнему является отличным выбором для широкого спектра приложений движения.
Для многих приложений синусоидальная коммутация обеспечивает значительное улучшение по сравнению с 6-ступенчатой коммутацией на основе Холла и по-прежнему является отличным выбором для широкого спектра приложений движения.
Резюме
