16.6. Тиристорное управление электроприводом
Основными факторами, обусловившими быстрое развитие тиристорного электропривода, являются следующие: высокий КПД тиристорного преобразователя (0,95—0,97), относительно малые габариты, масса и инерционность тиристоров, незначительная мощность устройств управления.
Использование тиристоров и соответствующих систем управления позволяет получать все требуемые регулировочные характеристикии динамические режимы двигателей как переменного, так и постоянного тока.
Тиристорный
электропривод переменного тока. Для
регулирования частоты вращения
асинхронного двигателя тиристоры
включаются в цепь статора или ротора.
В первом случае с их помощью можно
регулировать амплитуду (фазное
регулирование) или частоту (частотное
регулирование) синусоидального напряжения
на обмотках статора и, следовательно,
вращающий момент на валу двигателя
(14.35). Во втором случае можно изменять
активное сопротивление цепи ротора и
таким образом (рис.
Искусственной коммутациейназывается выключение тиристора посредством подключения к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Примером может служить
 Узел
искусственной коммутации содержит
вспомогательный тиристор Tвс,
резистор г2и конденсатор С.
Узел
искусственной коммутации содержит
вспомогательный тиристор Tвс,
резистор г2и конденсатор С.Пусть первоначально рабочий тиристор Т открыт, а вспомогательный Твс закрыт. В это время конденсатор
Чтобы вновь включить
рабочий тиристор, на его управляющий
электрод надо подать сигнал из устройства
управления.
Следующий цикл начинается с подачи сигнала из устройства управления на управляющий электрод вспомогательного тиристора.
Эквивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Регулируя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем.
Одним из наиболее перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты напряжения на обмотках статора. Для этой цели широко используются тиристорные автономные инверторы, т. е. устройства преобразования постоянного напряжения в переменное с любым числом фаз.
Рассмотрим
простейшую схему однофазного автономного
инвертора (рис. 16.11), в которой источник
постоянного напряжения Е соединен
со средней точкой первичной обмотки
трансформатора. Когда тиристор T1 включается сигналом блока управления,
а тиристор
16.11), в которой источник
постоянного напряжения Е соединен
со средней точкой первичной обмотки
трансформатора. Когда тиристор T1 включается сигналом блока управления,
а тиристор
Если управляющий сигнал включает тиристор Т2, то перезарядка конденсатора С закрывает тиристор T1 аналогично рис. 16.10, а источник постоянного напряжения Е подключается к правой половине первичной обмотки. В магнитопроводе возбуждается магнитный поток противоположного направления, чему соответствует и изменение направления ЭДС, индуктируемой во вторичной обмотке
 Частота
переменного напряжения, получаемого
от инвертора, определяется частотой
генератора управляющих сигналов,
включающих поочередно тиристоры.
Частота
переменного напряжения, получаемого
от инвертора, определяется частотой
генератора управляющих сигналов,
включающих поочередно тиристоры.Описанный инвертор может быть использован для плавной регулировки частоты вращения однофазных и двухфазных асинхронных двигателей (см. § 14.18).
Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника постоянного напряжения
Устройства,
сочетающие в себе тиристорные выпрямители
и тиристорные инверторы, принято называть шириапорными
преобразователями. В
электроприводе иногда используют и
более сложные тиристорные преобразователи,
например тиристорные выпрямитель —
инвертор — выпрямитель.
Применение различных способов тиристорного управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50 : 1 и выше.
Тиристорный электропривод постоянного тока. При необходимости регулирования частоты вращения двигателя постоянного тока и получения специальных характеристик в настоящее время широко используются тиристорные преобразователи. С их помощью двигатели постоянного тока можно подключить к сети переменного тока.
Среднее значение
выпрямленного напряжения трех фаз равно
напряжению на якоре двигателя постоянного
тока (10. 10):
10):
где α — угол запаздывания включения тиристоров.
Изменяя угол запаздывания с помощью блока управления, можно изменять постоянное напряжение на якоре двигателя, т. е. постоянный ток в цепи якоря Iя. В свою очередь это приводит к изменению вращающего момента на валу двигателя (13.2).
Индуктивная катушка в цепи якоря служит для уменьшения пульсаций тока.
Тиристорный электропривод переменного тока, включенный в статорную часть асинхронного двигателя
Боихонов Заилобиддин Уразали оглы1, Узаков Рахмонжон1
1Андижанский машиностроительный институт
Аннотация
В основном в этой статье тиристорно-управляемое устройство включается в статорную часть асинхронного двигателя, с помощью изменения напряжения, изменения сопротивления индукционного реостата и изменения емкости конденсатора изменяется механическая характеристика асинхронного двигателя с фазным ротором.
Ключевые слова: асинхронные электродвигатели постоянного тока, магнитный поток, напряжение, реостат, тиристор
Библиографическая ссылка на статью:
Боихонов З.У.о., Узаков Р. Тиристорный электропривод переменного тока, включенный в статорную часть асинхронного двигателя // Современные научные исследования и инновации. 2020. № 5 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2020/05/92669 (дата обращения: 21.12.2022).
Основной задачей современного производства является обеспечение роста научно-технического прогресса. Основным условием его выполнения непрерывное усовершенствование технологий, систем и средств управления технологического оборудования и технологического процесса.
Известно, в наши дни микроэлектроника являясь основным фактором научно-технического роста, гарантирует экономического подъёма общества.
В наши дни все существующие направления технического развития в текстильной и легкой промышленности, основанные на применении современных микропроцессоров и средств автоматики направлены на улучшение эффективности труда и качества продукции.
Необходимо подчеркнуть, что оборудование агрегатов машин и механизмов, входящих в состав производственной системы текстильных и прядильных фабрик современными средствами управления и регулирования полностью отвечает современным требованиям.
Для этой цели вместо двигателя постоянного тока устанавливается простой по конструкции, дешевый по себестоимости, расход дефицитных металлов 1,5 ÷ 2 раза меньше (в сравнении с двигателем постоянного тока), с простой системой управления асинхронный электродвигатель переменного тока, работающий надёжно и достаточно удовлетворяющий рабочих характеристик. Асинхронные электродвигатели широко применяются во многих отраслях производства. Скорость вращения асинхронного двигателя регулируется просто, управляется индукционным реостатом новой конструкции.
По приведенной формуле асинхронного двигателя с фазным ротором его механическая характеристика выражается в различных значениях.
Здесь общее сопротивление находится по следующему выражению
Тиристорно управляемое устройство включается в статорную часть асинхронного двигателя, с помощью изменения напряжения, изменения сопротивления индукционного реостата и изменения емкости конденсатора изменяется механическая характеристика асинхронного двигателя с фазным ротором.
Скорость вращения асинхронного двигателя регулируется простым индукционным реостатом новой конструкции.
Для изменения скорости вращения двигателя изменяется образуемый магнитный поток в намагничивающей обмотке, т.е. появляется магнитный поток, связанный подаваемой силой тока на эту обмотку.
Этот магнитный поток, по направлению противоположен магнитному потоку, создаваемому обмоткой высокой мощности и алгебраически вычитается. В результате связанный значению направленного магнитного потока активное и реактивное сопротивления индукционного реостата. Это изменение в свою очередь приводит к изменению скорости вращения двигателя. Если коэффициент скольжения равняется S=1, то количество электрических параметров энергии, потребляемой индукционным реостатом равняется нулю. Изменением активно-индуктивного сопротивления индукционного реостата и сохранением некоторого сопротивления производится изменением значения напряжения, подаваемого на обмотку статора и увеличения (или уменьшения) количества конденсаторов.
Кроме этого принцип работы электропривода с асинхронным двигателем и с индукционным реостатом основан на количестве вращения и производится за счёт изменения сопротивления индукционного реостата. В результате ограничения тока ротора приводит к изменению скорости вращения двигателя. Регулирование скорости электропривода дает возможность повышения производительность шлихтовальной машины.
В частотно-управляемом асинхронном электроприводе на основании изменение частоты переменного тока на обмотке статора регулируется скорость вращения электродвигателя. В конце концов составляется система управления электродвигателем, приводящий энергосбережению.
Сведения, полученные результатами научных исследований показывают, что использование тиристорного электропривода переменного тока дает возможность уменьшению дерганий в электродвигателях и возможность мягкого пуска.
Библиографический список
- М. П. Белов, В. А.
 Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.
Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г. - Абрамов А.Г. Размерный ряд индукционных автоматических реостатов для электродвигателей с фазным ротором. Электричество №12 сраница 46-49 1965 год
- Шмелев А.Н. Шишло К.С. Электрооборудование промишленных предприятий текстильного производства М. Легкая индустрия. 1975 год
- Башарин А.Б, Новиков В.А., Соколовский Г.Г. Управление электроприводами Л. Энергия 1982 гор
 Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.
Новиков, Л. Н. Рассудов.. автоматизированный электропривод типовых производственных механизмов и технологических комплексов. Москва. Издательский центр «Академия».2007 г.Количество просмотров публикации: Please wait
Все статьи автора «Режабов Зайлобиддин Маматович»
Тиристорное управление трехфазными асинхронными двигателями
РЕКЛАМА:
В этой статье мы обсудим: 1. Тиристорное управление регуляторами переменного тока. 2. Регулирование переменного напряжения и частоты. 3. Регулирование переменного тока и переменной частоты. 4. Тиристорное управление циклопреобразователями. Контроль сопротивления 7. Схема восстановления мощности скольжения.
4. Тиристорное управление циклопреобразователями. Контроль сопротивления 7. Схема восстановления мощности скольжения.
Тиристорное управление регуляторов переменного тока
:Регулятор переменного тока преобразует постоянное переменное напряжение в переменное переменное напряжение той же частоты. Несомненно, уровень переменного напряжения можно изменить с помощью автотрансформатора, РПН, реактора насыщения и т. д. Эти устройства используются уже давно и используются до сих пор. Но регуляторы переменного тока, использующие тиристоры и симисторы, становятся все более популярными из-за их высокого КПД, быстрого управления и компактных размеров. Однако регуляторы переменного тока, использующие тиристоры и симисторы, вносят нежелательные гармоники в цепи. Регуляторы переменного тока классифицируются как однофазные и трехфазные. Каждый из них может быть полуволновым (т. е. однонаправленным) или полноволновым (т. е. двунаправленным).
Поскольку на вход регулятора переменного тока подается переменный ток, он всегда коммутируется от сети. Поэтому принудительная коммутация не требуется. Таким образом, схемы регуляторов переменного тока довольно просты. В регуляторах переменного тока используются два типа управления. Они известны как интегральное управление циклом и фазовое управление.
Поэтому принудительная коммутация не требуется. Таким образом, схемы регуляторов переменного тока довольно просты. В регуляторах переменного тока используются два типа управления. Они известны как интегральное управление циклом и фазовое управление.
РЕКЛАМА:
В интегральном цикле управления, также известном как двухпозиционное управление, тиристоры используются в качестве переключателей для подключения двигателя к источнику питания на определенное количество циклов напряжения источника, а затем для его отключения на другое определенное количество циклов . Каждое время включения и выключения состоит из целого числа циклов. Тиристоры включаются импульсами затвора при пересечении нулевого напряжения входного напряжения.
При фазовом управлении тиристоры используются в качестве переключателей для подключения двигателя к источнику питания на определенную часть каждого цикла напряжения питания. Большинство регуляторов переменного тока используют управление фазой. Конфигурации силовых цепей для управления интегральным циклом и управления фазой ничем не отличаются.
Плавное изменение трехфазного переменного напряжения может быть реализовано за счет различных конфигураций силовой цепи.
Трехфазные регуляторы могут быть полуволновыми или двухполупериодными. Схема трехфазного полуволнового регулятора для двигателей, соединенных треугольником или звездой, у которых нейтральная точка недоступна, показана на рис. 3.34. В этой схеме используются три тиристора и три диода. Хотя полуволновой регулятор переменного тока, показанный на рис. 3.34, снижает стоимость полупроводниковых приборов и не приводит к возникновению постоянных составляющих ни в одной части системы, но он вносит больше гармоник в линейный ток, чем двухполупериодный регулятор. . Двухполупериодная схема на практике не используется.
На рис. 3.35 показан трехфазный двухполупериодный регулятор. В нем используется 6 тиристоров, по 2 на каждую фазу. Входной трансформатор может использоваться или не использоваться. Что касается нагрева обмоток двигателя, двигатель, соединенный звездой, питаемый от двухполупериодного регулятора переменного тока, предпочтительнее, чем двигатель, соединенный треугольником, питаемый от двухполупериодного регулятора переменного тока. Это так, потому что любая третья гармоника напряжения, генерируемая противо-ЭДС двигателя, может вызвать блуждающие токи в случае двигателя, соединенного треугольником.
Это так, потому что любая третья гармоника напряжения, генерируемая противо-ЭДС двигателя, может вызвать блуждающие токи в случае двигателя, соединенного треугольником.
Для цепей нагрузки, соединенных треугольником, в которых доступен каждый конец каждой фазы, используется схема, показанная на рис. 3.36. Такое расположение имеет то преимущество, что уменьшает ток устройства, поскольку теперь оно должно проводить 1/√3 тока, если бы они были соединены в линию обмотки треугольником. Как только волна фазного тока известна, волна линейного тока может быть построена с помощью суперпозиции.
Для цепей нагрузки, соединенных звездой, в которых нейтральная точка доступна и может быть разомкнута, может использоваться схема, показанная на рис. 3.37. При таком расположении необходимое количество тиристоров уменьшается до трех, а схема управления значительно упрощается. Потребляемая мощность двигателя может быть на 100 % больше, чем при управлении синусоидальным напряжением, особенно на пониженных скоростях.
РЕКЛАМА:
Если изменяется только частота, а напряжение статора поддерживается постоянным, магнитный поток статора не будет соответствовать номинальному значению. Работа с потоком ниже или выше номинального значения нежелательна. Для работы с постоянным потоком необходимо, чтобы ЭДС индукции увеличивалась или уменьшалась линейно с приложенной частотой. При более высоких напряжениях и при работе на высокой частоте потери на статоре очень малы, и, таким образом, работа с постоянным потоком достигается за счет поддержания постоянного отношения V/f.
Регулируемое напряжение и частота статора могут быть получены из систем, показанных на рис. 3.38 или на рис. 3.41, известных как прямоугольный инвертор и инвертор с широтно-импульсной модуляцией (ШИМ) соответственно.
Схема питания прямоугольного инвертора показана на рис. 3.38. Трехфазный источник переменного тока преобразуется в постоянный с помощью управляемого выпрямителя. Выход выпрямителя подается на схему фильтра для удаления гармоник. Выход постоянного тока от фильтра подается на управляемый инвертор, который обеспечивает выход переменного напряжения и переменной частоты. Это питание подается на статор трехфазного асинхронного двигателя, скорость которого необходимо регулировать.
Выход выпрямителя подается на схему фильтра для удаления гармоник. Выход постоянного тока от фильтра подается на управляемый инвертор, который обеспечивает выход переменного напряжения и переменной частоты. Это питание подается на статор трехфазного асинхронного двигателя, скорость которого необходимо регулировать.
РЕКЛАМА:
На рис. 3.39 показаны осциллограммы фазного напряжения V AN , V BN , V CN и осциллограммы линейного напряжения V AB , V BC и V CA . Каждая форма сигнала линейного напряжения смещена по фазе во времени на 120 электрических градусов относительно друг друга и представляет собой квазипрямоугольную волну шириной 120°. Примечательно, что тиристоры инвертора принудительно коммутируются, поскольку асинхронный двигатель является нагрузкой с отстающим коэффициентом мощности. Диоды обратной связи помогают циркулировать реактивной мощности нагрузки с фильтрующим конденсатором и поддерживают волны выходного напряжения фиксированными на уровне напряжения звена постоянного тока.
Требуемое соотношение напряжения и частоты асинхронного двигателя показано на рис. 3.40. Когда частота меньше нормальной частоты, напряжение уменьшается в той же пропорции, чтобы поддерживать постоянное значение V/f. На очень низких частотах, когда падение реактивного сопротивления становится меньше по сравнению с падением сопротивления статора (ω L < R), для компенсации этого эффекта требуется приложение дополнительного напряжения. Это означает более высокое отношение V/f. Когда частота превышает нормальную частоту, крутящий момент уменьшается с уменьшением потока в воздушном зазоре, и теперь двигатель работает в области постоянной мощности, как показано на рис. 3.40. Это эквивалентно режиму ослабления поля при управлении скоростью двигателя постоянного тока.
При работе на пониженном напряжении снижается напряжение преобразователя и, следовательно, уменьшается коммутационная способность конденсатора. Таким образом, инвертор обычно снабжен вспомогательным источником постоянного напряжения постоянного тока для целей коммутации.
РЕКЛАМА:
Упомянутый выше инвертор не может возвращать мощность обратно в линии питания переменного тока, если для формирования реверсивной системы не добавлен другой выпрямитель с фазовым управлением. Этот метод управления скоростью используется в 3-фазных асинхронных двигателях малых и средних размеров, где передаточное число обычно ограничено до 10:1.0003
Примечательно, что электрическая машина спроектирована в соответствии с точкой, близкой к точке насыщения на кривой намагничивания (или кривой B-H). Это сделано с точки зрения полной загрузки ядра. Если уменьшить частоту статора, поддерживая постоянное напряжение статора, двигатель будет работать в области насыщения и, следовательно, двигатель будет потреблять большой ток намагничивания, что приведет к увеличению потерь в сердечнике и статоре и, следовательно, к снижению эффективности двигателя. Однако, если увеличить только частоту питания, поддерживая постоянное напряжение статора, двигатель будет работать с низкой магнитной индукцией и, таким образом, мощность двигателя будет использоваться недостаточно.
Схема управления широтно-импульсной модуляцией (ШИМ) переменного напряжения с переменной частотой для асинхронного двигателя показана на рис. 3.41. Это новейший метод, который заменяет описанную выше схему инвертора прямоугольных импульсов.
Инверторы с широтно-импульсной модуляцией (ШИМ) используют прерывание или импульсный метод для управления выходным переменным напряжением статического инвертора. Напряжение в звене постоянного тока не регулируется диодным выпрямителем. Прямоугольное или ступенчатое выходное напряжение быстро включается и выключается несколько раз в течение каждого полупериода, так что формируется ряд импульсов одинаковой амплитуды. Каждый импульс имеет амплитуду входного напряжения инвертора В DC . Величина основного выходного напряжения регулируется изменением общего времени включения в течение полупериода. Коммутируя одну сторону моста несколько раз в течение полупериода, можно получить выходное напряжение формы волны, показанной на рис. 3.42 (а).
3.42 (а).
Простые ШИМ-инверторы могут быть легко созданы для создания формы сигнала всего с двумя импульсами за полупериод в пределах шестиступенчатой огибающей, как показано на рис. 3.42 (b). В таком сигнале присутствуют значительные пятая и седьмая гармоники, которые вызывают заметное ухудшение низкоскоростных характеристик двигателя переменного тока. Для устранения гармоник низкого порядка используются более совершенные методы ШИМ, в которых высокочастотные импульсы возникают на протяжении всего полупериода.
В сложных системах ШИМ ширина импульса изменяется в течение полупериода синусоидальным образом, как показано на рис. 3.43. На самом деле импульсы должны располагаться через равные интервалы, а ширина импульса в определенном положении должна быть пропорциональна площади под синусоидой в этом положении. В сигнале ШИМ самая низкая частота гармоники приходится на частоту повторения импульсов, и, если она намного выше основной частоты, адекватная фильтрация обеспечивается индуктивностью машины.
Такие сигналы обычно создаются с помощью схемы управления, в которой высокочастотный треугольный сигнал смешивается с синусоидальным сигналом желаемой частоты. Управление напряжением достигается за счет изменения ширины всех импульсов без изменения синусоидального соотношения.
На рис. 3.44 показан метод синусоидальной ШИМ, в котором равнобедренная треугольная волна сравнивается с сигналом синусоидальной волны, а точки коммутации определяются точками пересечения. Если индекс модуляции оказывается меньше единицы, на выходе появляются только гармоники несущей частоты с боковыми полосами, связанными с основной частотой.
Такая форма волны генерирует меньше гармонического нагрева и пульсации крутящего момента по сравнению с прямоугольной волной. Когда индекс модуляции превышает единицу, максимальное напряжение получается в прямоугольном режиме. Таким образом, режим ШИМ применим в области постоянного крутящего момента, в то время как в области постоянной мощности работа аналогична работе в режиме прямоугольной волны.
Транзисторное ШИМ-управление, показанное на рис. 3.45, используется для управления двигателями малых и средних размеров. Безусловно, силовые транзисторы стоят намного дороже, чем тиристоры той же мощности, но экономия за счет исключения схемы коммутации и соответствующих коммутационных потерь, схема оказывается более экономичной и эффективной. Кроме того, транзисторы работают быстрее, ШИМ возможен на более высокой частоте. Это дополнительно снижает потери машины.
Регулятор частоты переменного тока : Схема управления переменной частотой тока для асинхронного двигателя показана на рис. 3.46. Переменное постоянное напряжение, обеспечиваемое выпрямителем с фазовым управлением, преобразуется в источник тока путем последовательного подключения большой катушки индуктивности. Большая индуктивность поддерживает постоянный ток. Напряжение, доступное на клеммах статора трехфазного асинхронного двигателя, почти синусоидальное с наложенными пиками напряжения из-за коммутации. Используемый преобразователь представляет собой коммутируемую линию, в то время как инвертор коммутируется принудительно, поскольку асинхронный двигатель работает с отстающим коэффициентом мощности. Преобразователь с фазовым управлением можно заменить диодным выпрямителем, за которым следует прерыватель постоянного тока.
Используемый преобразователь представляет собой коммутируемую линию, в то время как инвертор коммутируется принудительно, поскольку асинхронный двигатель работает с отстающим коэффициентом мощности. Преобразователь с фазовым управлением можно заменить диодным выпрямителем, за которым следует прерыватель постоянного тока.
Схема имеет следующие преимущества:
(i) Поскольку входной ток постоянен, пропуски зажигания устройств и короткие замыкания не представляют проблемы.
(ii) Меньшее количество компонентов в цепи инвертора и меньшие коммутационные потери.
(iii) Прочная и надежная силовая цепь.
(iv) Более простая и надежная схема управления. Это связано с тем, что нужно управлять только 6 тиристорами.
(v) Пиковый ток устройств ограничен.
(vi) Он может работать с реактивными или рекуперативными нагрузками без обратных диодов.
Недостатки:
(i) Несколько вялая реакция привода.
(ii) Несколько громоздкий и дорогой инвертор. Это связано с большими размерами индуктивности и коммутационных конденсаторов.
Это связано с большими размерами индуктивности и коммутационных конденсаторов.
(iii) Низкочастотный диапазон инвертора.
(iv) Он не может работать без нагрузки. Это связано с тем, что для удовлетворительной коммутации инвертора необходим некоторый минимальный ток нагрузки.
Тиристорное управление циклопреобразователями
:Циклоконвертер преобразует переменный ток одной частоты в переменный ток другой частоты. Циклопреобразователи можно классифицировать как однофазные в однофазные, трехфазные в однофазные и трехфазные в трехфазные устройства. Их также можно разделить на повышающие и понижающие циклопреобразователи. Повышающий циклоконвертер обеспечивает выходную частоту, частота которой выше, чем входная, в то время как понижающий циклоконвертер обеспечивает выходную частоту ниже, чем входная.
Понижающий циклоконвертер использует линейную или естественную коммутацию. Циклопреобразователи изначально разрабатывались для систем электрической тяги, работающих на частотах 25 Гц и 16 2/3 Гц. На ранних этапах использования циклопреобразователи использовали ртутно-дуговые выпрямители. С развитием тиристоров увеличилось применение циклопреобразователей.
На ранних этапах использования циклопреобразователи использовали ртутно-дуговые выпрямители. С развитием тиристоров увеличилось применение циклопреобразователей.
Принципиальная схема силовой цепи трехфазного циклопреобразователя показана на рис. 3.47.
Независимое управление выходной частотой и напряжением достигается изменением только одного параметра, а именно изменением точек включения управляемых выпрямителей. Частота выходного напряжения регулируется скоростью, с которой точки срабатывания изменяются относительно точки покоя, а выходное напряжение регулируется максимальным отклонением точек срабатывания от точки покоя. Циклопреобразователь со связанной с ним схемой зажигания выдает выходное напряжение, которое является копией опорного напряжения.
Работа циклоконвертера характеризуется рядом особенностей. Как правило, они используются в качестве понижающих преобразователей частоты. Не существует фиксированного минимального отношения входной частоты к выходной; однако выходная частота обычно ограничивается одной третью или половиной входной или сетевой частоты. Ниже этих соотношений эффективность как циклопреобразователей, так и двигателей, поставляемых ими, начинает значительно падать.
Ниже этих соотношений эффективность как циклопреобразователей, так и двигателей, поставляемых ими, начинает значительно падать.
Реверсивность — еще одна особенность приводных систем циклоконвертера. Привод двигателя переменного тока с питанием от циклопреобразователя будет реагировать на изменение полярности входных сигналов путем изменения направления вращения двигателя без использования контакторов для изменения последовательности фаз.
Еще одной важной характеристикой является способность циклопреобразователя управлять потоком мощности в любом направлении. Это, вместе с упомянутой выше функцией реверсивности, обеспечивает привод асинхронного двигателя, способный работать в любом из четырех квадрантов кривой скорости двигателя.
Хотя циклоконвертер имеет много привлекательных с теоретической точки зрения характеристик, у него есть несколько ограничений, из-за которых он не стал популярным. Ему нужно больше силовых полупроводников, чем инвертору. Например, для трехфазного циклопреобразователя требуется 18 тиристоров, тогда как для комбинации выпрямитель-инвертор (рис.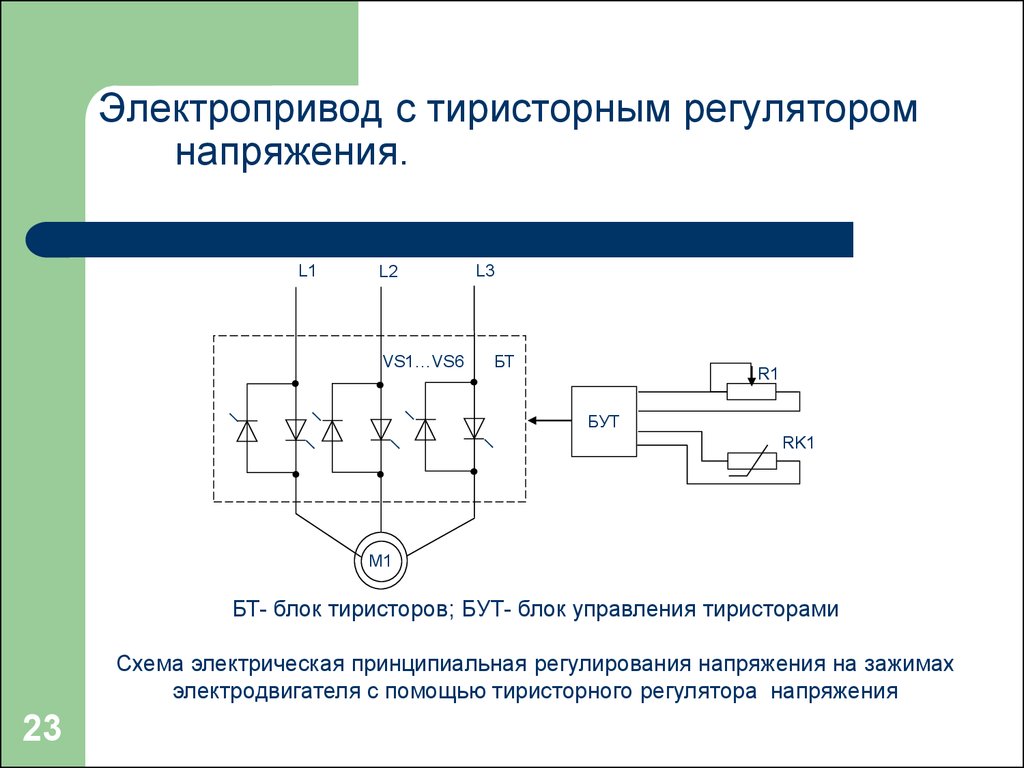 3.38) требуется только 12 тиристоров.
3.38) требуется только 12 тиристоров.
могут производить только субчастотный выход. Загрязнение линии гармониками и низким коэффициентом мощности также может быть проблемой для циклопреобразователей высокой номинальной мощности. Однако недавние достижения в области устройств быстрого переключения привели к созданию устройств, известных как преобразователи частоты с принудительной коммутацией (FCDFC), которые работают с высокой эффективностью и имеют низкое содержание гармоник.
Приводы циклопреобразователейобычно используются для двигателей больших размеров, поскольку стоимость и сложность силовых цепей и цепей управления не позволяют использовать их для обычных приложений. Циклопреобразователи использовались в дизельных электровозах, где высокочастотный генератор переменного тока, соединенный с валом двигателя, обеспечивает мощность на входе. Они также использовались в безредукторных приводах цементных мельниц или шаровых мельниц.
Пуск при пониженном напряжении (плавный пуск) : Пусковой линейный ток при полном напряжении асинхронного двигателя может примерно в 6 раз превышать номинальный ток при полной нагрузке. Такой большой ток может вызвать сильное падение напряжения в сети, питающей асинхронный двигатель.
Такой большой ток может вызвать сильное падение напряжения в сети, питающей асинхронный двигатель.
Схема, показанная на рис. 3.48, может использоваться для подачи пониженного напряжения при пуске. Как видно, это трехфазный регулятор переменного тока. При правильном управлении углом открытия регулятор обеспечивает низкое выходное напряжение, подаваемое на асинхронный двигатель. Когда двигатель достигает полной или номинальной скорости, регулятор может быть закорочен механическим контактором, чтобы двигатель работал нормально при номинальном напряжении. Более того, если двигатель используется для привода с постоянной скоростью, можно работать с двигателем при пониженном напряжении, когда механическая нагрузка невелика. Работа при пониженном напряжении приводит к уменьшению потерь мощности в двигателе и, таким образом, к экономии энергии.
Контроль сопротивления ротора : Обычный метод подключения сопротивлений через контактные кольца асинхронного двигателя с фазным ротором представляет собой форму контроля напряжения ротора. Основным недостатком этого метода управления скоростью является его низкая эффективность из-за потери мощности во внешних резисторах.
Основным недостатком этого метода управления скоростью является его низкая эффективность из-за потери мощности во внешних резисторах.
На рис. 3.49 (а) показаны трехфазный диодный выпрямитель и запирающий тиристор (GTO), включенные в цепь ротора асинхронного двигателя с фазным ротором. ГТО, работающий как прерыватель, изменяет сопротивление R в соответствии с рабочим циклом α. Эффективное сопротивление R e определяется как-
R e = R (1 – α) …(3,59)
Таким образом, скорость асинхронного двигателя с фазным ротором регулируется путем изменения соотношения времени включения и времени выключения.
Схема рекуперации мощности тиристора: Рис. 3.49 (б) показывает схему, известную как восстановление мощности скольжения Рис. 3.48. Выводы ротора подключены к трехфазной сети переменного тока через два полностью управляемых тиристорных моста. Мост 1 действует как выпрямитель (или преобразователь), а мост 2 действует как инвертор. Выходная мощность ротора может возвращаться обратно к источнику питания. Поскольку частота токов ротора является частотой скольжения, этот метод известен как схема восстановления мощности скольжения. Управляя углами открытия двух мостов, можно изменять выходную мощность ротора.
Выходная мощность ротора может возвращаться обратно к источнику питания. Поскольку частота токов ротора является частотой скольжения, этот метод известен как схема восстановления мощности скольжения. Управляя углами открытия двух мостов, можно изменять выходную мощность ротора.
Таким образом, скольжение и скорость двигателя (при том же крутящем моменте) также изменятся. Однако недостатком этой схемы является то, что оба моста потребляют реактивную мощность от питающей сети. Следовательно, общий коэффициент мощности двигателя плохой. Если желательны скорости только ниже синхронной, мост 1 может быть неуправляемым и, таким образом, может состоять из диодов. Если оба моста управляются, работа двух мостов также может быть реверсирована для получения скорости выше синхронной.
Фактически мощность скольжения либо возвращается в сеть питания, как в схеме Шербиуса, либо используется для привода вспомогательного двигателя, который механически соединен с валом асинхронного двигателя, как в схеме Крамера.
1. Статический привод Шербиуса:
Статический привод Шербиуса также использует принцип восстановления мощности скольжения. Принципиальная схема показана на рис. 3.50. Для достижения как субсинхронного, так и сверхсинхронного управления скоростью преобразователи 1 и 2 должны быть полностью управляемыми тиристорными мостами, один из которых работает на частоте скольжения как выпрямитель или инвертор, а другой работает на частоте сети как инвертор или выпрямитель. Стоимость преобразователей весьма ощутима, а также требуется стробирующая схема со сдвигом частоты.
Кроме того, при скоростях, близких к синхронным, когда ЭДС частоты скольжения достаточно малы для естественной коммутации, требуются специальные соединения для методов принудительной коммутации. Если преобразователь 1 взять неуправляемый (диодный мост), каскад преобразователя и блок управления станут экономичными и простыми, но тогда будет доступно только подсинхронное управление скоростью.
Трехфазный трансформатор между источником питания и инвертором 2 предназначен для доведения напряжения цепи ротора до значения, соответствующего напряжению источника питания. Основным недостатком субсинхронного каскадного привода является низкий коэффициент мощности, особенно на пониженных скоростях.
Этот привод применяется в приводах вентиляторов и насосов большой мощности, которым требуется регулирование скорости только в узком диапазоне. Номинальная мощность инвертора и трансформатора с диодным мостом равна максимальному скольжению, умноженному на номинальную мощность двигателя, что приводит к низкой стоимости привода. Этот привод обеспечивает постоянный контроль крутящего момента. Постоянный контроль мощности можно получить с помощью привода Kramer, обсуждаемого ниже.
2. Статический привод Kramer:
На рис. 3.51 показана принципиальная схема каскада Крамера со статическим преобразователем. Цепь ротора асинхронного двигателя с контактными кольцами подает мощность скольжения, выпрямленную диодным мостом, на якорь двигателя постоянного тока с независимым возбуждением, механически связанного с асинхронным двигателем. Регулирование скорости достигается путем изменения тока возбуждения двигателя постоянного тока. Можно считать, что ЭДС, пропорциональная противоЭДС двигателя постоянного тока, вводится в цепь ротора асинхронного двигателя, вызывая изменение скорости системы.
Регулирование скорости достигается путем изменения тока возбуждения двигателя постоянного тока. Можно считать, что ЭДС, пропорциональная противоЭДС двигателя постоянного тока, вводится в цепь ротора асинхронного двигателя, вызывая изменение скорости системы.
Для достижения большего диапазона скоростей потребуется замена диодного моста на тиристорный мост. С помощью тиристорных мостов скорость можно регулировать вплоть до полной остановки.
Статический привод Крамера не имеет инвертора с линейной коммутацией, он потребляет меньше реактивной мощности и вносит меньше гармоник в токи, чем статический привод Шербиуса. Однако у него есть проблемы с техническим обслуживанием, которые возникают из-за коллектора и щеток вспомогательного двигателя постоянного тока. Он также имеет недостаток большой момент инерции.
Системы статического привода Kramer используются в насосах большой мощности и нагрузках компрессорного типа, где регулирование скорости осуществляется в узком диапазоне и ниже синхронной скорости.
Главная ››
Тиристорное управление электродвигателями
РЕКЛАМА:
В этой статье мы обсудим: 1. Введение в тиристорное управление электродвигателями 2. Тиристорное управление двигателями постоянного тока 3. Тиристорное управление трехфазными асинхронными двигателями 4. Тиристорное управление трехфазным синхронным двигателем 5. Специальные Особенности 6. Преимущества и недостатки.
Введение в тиристорное управление электродвигателями : Электродвигатели применяются в очень широком диапазоне мощностей, от нескольких ватт до тысяч киловатт. Многие приложения требуют очень точной настройки положения (например, в робототехнике). Во многих приложениях оптимальная производительность и эффективность являются главной задачей. Системы привода с регулируемой скоростью (VSD) помогают оптимизировать процесс, чтобы снизить инвестиционные затраты, эксплуатационные расходы и расходы на техническое обслуживание. Энергосбережение – еще одно большое преимущество приводов с регулируемой скоростью.
Появление тиристоров, способных выдерживать большие токи, произвело революцию в области управления электроэнергией. Тиратроны, игнитроны, ртутно-дуговые выпрямители, магнитные усилители, мотор-генераторы заменены твердотельными схемами с полупроводниковыми диодами и тиристорами. Приводы с тиристорным управлением, использующие как двигатели постоянного, так и переменного тока, находят широкое применение в промышленности в качестве приводов с регулируемой скоростью.
РЕКЛАМА:
В 1960-х годах мощность переменного тока преобразовывалась в мощность постоянного тока для прямого управления приводными двигателями с твердотельными устройствами (кремниевыми диодами высокой мощности и выпрямителями, управляемыми кремнием). Первоначально реакторы насыщения использовались в сочетании с мощными кремниевыми выпрямителями для приводов постоянного тока. В настоящее время тиристоры широко используются для преобразования переменного тока в постоянный.
Общая конфигурация моторного привода:
На рис. 3.2 показана блок-схема, иллюстрирующая управление моторным приводом. Основными составляющими являются силовой электронный преобразователь, двигатель, процессы, компьютер управления процессом и контроллер.
3.2 показана блок-схема, иллюстрирующая управление моторным приводом. Основными составляющими являются силовой электронный преобразователь, двигатель, процессы, компьютер управления процессом и контроллер.
Требуемые характеристики моторного привода определяются технологическим процессом. Для процесса может потребоваться привод с регулируемой скоростью или сервопривод и т. д. Двигатель выбирается на основе этих требований. Силовой электронный преобразователь преобразует входной однофазный или трехфазный переменный ток в питание, подходящее для обеспечения желаемых характеристик двигателя. Компьютер управления технологическим процессом получает обратную связь от процесса относительно степени выполнения требований. Эта обратная связь может быть связана со скоростью, положением и т. д.
РЕКЛАМА:
Компьютер передает сигнал об ошибке контроллеру, который, в свою очередь, выполняет корректирующие действия. Корректирующим действием может быть, скажем, изменение угла открытия тиристоров силового электронного преобразователя. В некоторых ситуациях точность и время отклика двигателя для настройки новой скорости имеют первостепенное значение. В некоторых других ситуациях требования могут быть не столь критичны.
В некоторых ситуациях точность и время отклика двигателя для настройки новой скорости имеют первостепенное значение. В некоторых других ситуациях требования могут быть не столь критичны.
1. Полностью управляемый выпрямитель :
На рис. 3.32 (а) показана принципиальная схема последовательного двигателя постоянного тока, питаемого от однофазной сети переменного тока через полностью управляемый выпрямитель. Якорь двигателя и обмотки возбуждения имеют не только индуктивность, но и сопротивление. Поскольку выходной ток выпрямителя не является идеальным постоянным током, также играет роль индуктивность. R — сопротивление якоря, включая сопротивление возбуждения, а L — индуктивность якоря, включая сопротивление возбуждения. Во время положительного полупериода тиристоры ТН 1 и TH 2 смещены в прямом направлении и начинают проводить при ωt = α. Ток нагрузки протекает через TH 1 , двигатель и TH 2 . При ωt = π напряжения питания меняются местами.
При ωt = π напряжения питания меняются местами.
Из-за индуктивности L тиристоры TH 1 и TH 2 продолжают проводить ток за пределами ωt = π. От ωt = π + α до ωt = 2π тиристоры TH 3 и TH 4 смещены в прямом направлении. При срабатывании ТН 3 и ТН 4 при ωt = π + α тиристоры ТН 1 и TH 2 , подвергаются обратному смещению и отключаются естественной коммутацией. Ток нагрузки передается от TH 1 и TH 2 к TH 3 и TH 4 . Этот режим работы продолжается до тех пор, пока TH 1 и TH 2 не сработают в следующем положительном полупериоде.
Квадранты работы и формы сигналов показаны на рис. 3.32 (б) и 3.32 (в). Если индуктивность L достаточно велика, ток двигателя более или менее постоянен. Значение α должно быть таким, чтобы при срабатывании тиристоров мгновенное значение переменного входного напряжения V max sin ωt больше противоЭДС E b . Это устанавливает нижний предел угла открытия α.
Это устанавливает нижний предел угла открытия α.
Среднее выходное напряжение преобразователя,
Для постоянного тока двигателя I a мы можем написать —
Поскольку ток возбуждения также равен I a , противо-ЭДС E b можно записать как K 1 I a Н, где K 1 — постоянная величина. Письменно E b как K 1 I a N мы пренебрегли остаточным магнетизмом в двигателе.
Замена значения I на из уравнения. (3.54) в уравнении (3.55), имеем-
Используя приведенное выше уравнение. (3.56) Моментно-скоростные характеристики для различных значений а можно построить, как показано на рис. 3.32 (г).
2. Полууправляемый выпрямитель :
Двигатель постоянного тока, питаемый от однофазной сети переменного тока через полууправляемый выпрямитель, показан на рис. 3.33 (а). Выпрямитель имеет два тиристора ТН 1 и TH 2 и два диода D 1 и D 2 . Обратный диод D FW помогает проводить ток, когда тиристор не проводит ток. R — сопротивление якоря и возбуждения, а L — индуктивность якоря и обмоток возбуждения.
Выпрямитель имеет два тиристора ТН 1 и TH 2 и два диода D 1 и D 2 . Обратный диод D FW помогает проводить ток, когда тиристор не проводит ток. R — сопротивление якоря и возбуждения, а L — индуктивность якоря и обмоток возбуждения.
Во время положительного полупериода тиристор TH 1 срабатывает при ωt = α и начинает проводить. Значение α должно быть таким, чтобы V max sin α > E b . Ток протекает через TH 1 , двигатель и диод D 1 от ωt = α до ωt = π. При ωt = π входное напряжение становится отрицательным и обратный диод D FW смещен в прямом направлении. Таким образом, при ωt = π тиристор TH 1 и диод D 1 перестают проводить ток, и ток переходит на D FW .
Во время отрицательного полупериода тиристор TH 2 смещен в прямом направлении, и когда он срабатывает при ωt = π + α, обратный диод D FW перестает проводить ток, и ток передается на TH 2 – D 2 Комбинация. TH 2 и D 2 проводят от ωt = π + α к ωt = 2π. При ωt = 2π тиристор TH 2 и диод D 2 отключаются, и ток через D FW свободно распространяется от ωt = 2π до ωt = 2π + α. При ωt = 2π + α тиристор TH 1 снова срабатывает и начинается следующий цикл работы. Таким образом, схема работает следующим образом: D FW , работает для 0 ≤ ωt ≤ α; TH 1 и D 1 проводят для α ≤ ωt ≤ π; Д FW проводит для π ≤ ω t ≤ π + α; и TH 2 и D 2 проводят для π + α ≤ ωt ≤ 2π.
TH 2 и D 2 проводят от ωt = π + α к ωt = 2π. При ωt = 2π тиристор TH 2 и диод D 2 отключаются, и ток через D FW свободно распространяется от ωt = 2π до ωt = 2π + α. При ωt = 2π + α тиристор TH 1 снова срабатывает и начинается следующий цикл работы. Таким образом, схема работает следующим образом: D FW , работает для 0 ≤ ωt ≤ α; TH 1 и D 1 проводят для α ≤ ωt ≤ π; Д FW проводит для π ≤ ω t ≤ π + α; и TH 2 и D 2 проводят для π + α ≤ ωt ≤ 2π.
Рабочий квадрант и формы волны показаны на рис. 3,33 (б) и 3,33 (в) соответственно.
Среднее выходное напряжение полупреобразователя определяется как-
Обратная ЭДС E b может быть записана как K 1 I a N без учета остаточного магнетизма-
Подстановка значения I a из уравнения. (3.57) в приведенном выше уравнении мы имеем-
Используя приведенное выше уравнение. (3.58) построены скоростно-моментные характеристики для различных значений α, как показано на рис. 3.33 (г).
(3.58) построены скоростно-моментные характеристики для различных значений α, как показано на рис. 3.33 (г).
Во время работы двигателей постоянного тока с независимым возбуждением и двигателей постоянного тока наблюдается, что область прерывистого тока меньше в случае двигателей постоянного тока с последовательным возбуждением. Использование полупреобразователя обеспечивает непрерывный ток практически во всем рабочем диапазоне, за исключением случаев, когда момент нагрузки очень мал. Если в цепи якоря используется индуктивность, можно получить непрерывный ток якоря во всем рабочем диапазоне.
Двигатели постоянного тока серии обычно используются для приложений с постоянной выходной мощностью. Однако скоростно-моментные характеристики не соответствуют постоянной выходной мощности для заданного угла включения и, следовательно, для получения постоянной мощности во всем диапазоне скоростей приходится регулировать угол включения α. Полупреобразовательная система, благодаря своему свободному действию, помогает поддерживать непрерывный ток и, таким образом, обеспечивает лучшую производительность двигателей по сравнению с системой с полным преобразователем. Также было замечено, что двигатель постоянного тока вместе с полупреобразователем обеспечивает лучшую производительность.
Также было замечено, что двигатель постоянного тока вместе с полупреобразователем обеспечивает лучшую производительность.
Преобразователи с фазовым управлением имеют низкий коэффициент мощности, особенно когда выходное напряжение меньше максимального, т. е. когда угол возбуждения α велик. Полупреобразователи обеспечивают лучший коэффициент мощности по сравнению с полными преобразователями, хотя улучшение незначительно.
Тиристорное управление трехфазными асинхронными двигателями :Скорость асинхронного двигателя определяется как-
Таким образом, скорость асинхронного двигателя с фиксированным числом полюсов зависит от частоты питания f и скольжения s, которое, в свою очередь, зависит от напряжения или тока, подаваемого на двигатель.
Доступны следующие методы регулирования скорости трехфазных асинхронных двигателей с использованием тиристоров:
1. Регулирование напряжения статора или регулирование постоянной частоты переменного напряжения.
2. Регулировка напряжения и частоты.
3. Контроль сопротивления ротора.
4. Контроль вторичного внешнего напряжения.
Изменение напряжения статора осуществляется с помощью регуляторов переменного тока, которые регулируют среднеквадратичное значение напряжения переменного тока, подаваемого на двигатель, путем введения тиристоров, включенных встречно-параллельно в каждую линию питания. Мощность переменной частоты получается с помощью циклопреобразователя, который напрямую преобразует переменный ток фиксированной частоты в переменный ток переменной частоты, или с помощью инвертора, который преобразует постоянный ток в переменный.
Эффективное значение внешнего сопротивления, введенного в цепь ротора, можно контролировать, подключив высокочастотный прерыватель к сопротивлению и изменяя время, в течение которого прерыватель включен в течение цикла. Статические преобразователи частоты используются для замены вспомогательных машин в системе Шербиуса. Схема Крамера также была изменена за счет использования диодного мостового выпрямителя вместо преобразователя ротора, но двигатель постоянного тока по-прежнему требуется для преобразования выпрямленной мощности скольжения в механическую энергию.
Схема Крамера также была изменена за счет использования диодного мостового выпрямителя вместо преобразователя ротора, но двигатель постоянного тока по-прежнему требуется для преобразования выпрямленной мощности скольжения в механическую энергию.
Синхронный двигатель представляет собой двигатель с постоянной скоростью и развивает крутящий момент только при синхронной скорости, которая прямо пропорциональна частоте питания. Следовательно, изменение частоты переменного тока является удобным методом управления скоростью синхронного двигателя. До появления силовых электронных устройств изменение частоты было очень сложной задачей.
Однако силовые электронные схемы обеспечивают простой метод изменения частоты. Переменный ток 50 Гц преобразуется в постоянный с помощью управляемого выпрямителя. Инвертор переменной частоты преобразует постоянный ток в переменный ток переменной частоты. Чтобы поддерживать постоянную плотность потока в двигателе, напряжение и частота должны изменяться в одном и том же отношении, чтобы соотношение напряжение/частота было постоянным.
На рис. 3.52 показана система регулирования скорости синхронного двигателя. Трехфазный переменный ток 50 Гц выпрямляется управляемым трехфазным выпрямителем. Фильтр удаляет гармоники с выхода выпрямителя. Инвертор переменной частоты подает переменный ток переменной частоты на синхронный двигатель. Таким образом, можно управлять скоростью синхронного двигателя. Выход постоянного тока фильтра также используется для возбуждения обмотки ротора.
В низкоскоростных приложениях большой мощности также можно использовать циклопреобразователь для преобразования переменного тока с частотой 50 Гц в переменный ток переменной частоты. Циклоконвертер выполняет преобразование без промежуточного звена постоянного тока. Максимальная выходная частота ограничена примерно одной третью частоты, поэтому выходная волна имеет низкое содержание гармоник.
Инверторный привод с коммутацией нагрузки для синхронного двигателя:
Для двигателей больших размеров (двигатели с выходной мощностью более 750 кВт) синхронный двигатель с коммутируемой нагрузкой становится конкурентоспособным с асинхронным двигателем в требованиях к регулируемой скорости. На рис. 3.53 показана схема инверторного привода с коммутацией нагрузки. Трехфазное питание переменного тока выпрямляется трехфазным мостовым преобразователем с фазовым управлением. Источник постоянного тока проходит через фильтр для улучшения формы волны, а затем подается на инвертор с коммутацией нагрузки.
На рис. 3.53 показана схема инверторного привода с коммутацией нагрузки. Трехфазное питание переменного тока выпрямляется трехфазным мостовым преобразователем с фазовым управлением. Источник постоянного тока проходит через фильтр для улучшения формы волны, а затем подается на инвертор с коммутацией нагрузки.
Каждая фаза синхронного двигателя представлена ЭДС внутренней индукции последовательно с индуктивностью обмотки статора. Частота и фаза токов статора синхронизированы с положением ротора. Коммутация тока в инверторе с коммутацией нагрузки для подачи токов в фазы статора в соответствующей последовательности обеспечивается ЭДС статора. Наличие трехфазной ЭДС индукции в обмотке статора двигателя вызывает коммутацию тиристора. Управление углом открытия преобразователя управляет его постоянным выходным напряжением и, следовательно, током.
Полная схема контроллера инверторного привода с коммутацией нагрузки показана на рис. 3.54. Входное напряжение статора синхронного двигателя измеряется для расчета положения поля ротора как функции времени. Измеренное напряжение выпрямляется, чтобы обеспечить сигнал постоянного тока, пропорциональный мгновенной скорости синхронного двигателя. Время выключения T off , доступное для тиристора в инверторе, поддерживается постоянным.
Измеренное напряжение выпрямляется, чтобы обеспечить сигнал постоянного тока, пропорциональный мгновенной скорости синхронного двигателя. Время выключения T off , доступное для тиристора в инверторе, поддерживается постоянным.
Поддержание тока возбуждения и выключение T постоянная, фактическая скорость сравнивается с эталонной скоростью. Сигнал ошибки усиливается, чтобы обеспечить ссылку l d . Если фактический ток I d меньше опорного, выпрямитель увеличивает напряжение, подаваемое на инвертор, тем самым увеличивая I d и крутящий момент двигателя. На основе тока I d и измеренного напряжения подаются импульсы зажигания на затворы тиристоров инвертора, чтобы поддерживать T выключенным постоянным.
Особенности двигателей с тиристорным приводом: Наиболее часто используемые двигатели постоянного тока для тиристорного привода представляют собой двигатели постоянного тока с независимым и последовательным возбуждением. Тиристорные приводные двигатели обычно отличаются конструкцией от обычных двигателей постоянного тока. Прежде чем обсуждать особенности, встроенные в тиристорные приводные двигатели, необходимо обсудить влияние тиристорного источника питания на работу двигателя постоянного тока.
Тиристорные приводные двигатели обычно отличаются конструкцией от обычных двигателей постоянного тока. Прежде чем обсуждать особенности, встроенные в тиристорные приводные двигатели, необходимо обсудить влияние тиристорного источника питания на работу двигателя постоянного тока.
Влияние тиристорного источника питания на характеристики двигателя постоянного тока :
1. Выходное напряжение тиристорного преобразователя состоит из постоянной составляющей и гармонических составляющих переменного тока.
2. Выходное напряжение может изменяться очень быстро по сравнению с напряжением двигателя-генератора из-за отсутствия постоянных времени возбуждения, связанных с генератором.
3. При неисправности тиристора при работе в инверторном режиме может возникнуть аномально высокое значение тока якоря.
4. Величина гармоник уменьшается с увеличением частоты гармоники для всех преобразователей. Величина гармоник увеличивается по мере увеличения угла открытия и уменьшения постоянного напряжения для всех двунаправленных преобразователей. Чем выше индуктивность якоря, тем меньше будут гармонические токи.
Чем выше индуктивность якоря, тем меньше будут гармонические токи.
5. Крутящий момент создается постоянной составляющей тока, тогда как нагрев создается эффективным (или среднеквадратичным) значением тока. Коэффициент формы (отношение действующего значения к среднему значению) для однополупериодных трехфазных тиристоров можно принять равным 1,2, а для двухполупериодных трехфазных тиристоров — 1,1. Это увеличивает электрические потери и, следовательно, нагрев трехфазных мостовых преобразователей больше на 5—7 %, а трехфазных полумостовых преобразователей — на 15—20 %.
6. На коммутационную способность серьезно влияет наличие гармонических токов. Пиковое значение тока увеличивается, межполюсный поток уменьшается по величине, и между межполюсным током и потоком возникает временная задержка из-за вихревых токов, генерируемых на железном пути межполюсного потока.
Другими эффектами тиристорного питания на работу двигателя являются нагрев межполюсной обмотки, насыщение межполюсного магнитопровода, напряжение трансформатора на щетках и повышение напряжения на участке коммутатора.
Особенности тиристорных двигателей :
Двигатели постоянного тока с тиристорным приводом разработаны со следующими особенностями для улучшения их характеристик:
1. Двигатели постоянного тока с тиристорным приводом изготавливаются с якорем большего диаметра и полюсами большего размера уменьшенной высоты.
2. Коллекторы увеличены, чтобы обеспечить дополнительную изоляцию, чтобы выдерживать большие и быстрые колебания напряжения.
3. Ярма, а также главные и коммутирующие полюса ламинированы для снижения воздействия вихревых токов.
4. Для улучшения отклика используется малоинерционная арматура.
5. Компенсационные обмотки используются в больших двигателях для уменьшения эффекта реакции якоря.
6. Разрезные щетки хорошего коммутационного качества используются для снижения влияния трансформаторного напряжения на коммутируемые катушки.
7. Использование пластинчатого ярма вместо цельного в большей степени улучшает коммутацию.
8. Использование большого количества коллекторных шин снижает напряжение между сегментами коммутатора и улучшает коммутацию.
9. Использование восьмиугольной, а не круглой формы для рамы позволяет разместить больше материала и дает более высокий рейтинг при том же размере рамы.
10. Плотность тока, используемая для якоря и межполюсной обмотки, снижена по сравнению с обычными двигателями постоянного тока того же типоразмера и номинала, чтобы уменьшить влияние нагрева якоря и межполюсных полюсов.
11. Улучшенный класс изоляции (материалы класса F в качестве стандартной изоляции) используется для обеспечения более высокого повышения температуры и рассеивания большего количества потерь от данного корпуса.
12. Соотношение дуга полюса/шаг полюса уменьшено, чтобы уменьшить отношение коммутационной зоны к нейтральной зоне.
13. Увеличена индуктивность якоря для уменьшения пульсаций тока. Это также может увеличить реактивное напряжение. Количество витков на катушку якоря поддерживается на минимальном уровне, поскольку реактивное напряжение пропорционально квадрату витков на катушку. Использование фиктивных катушек исключено.
Использование фиктивных катушек исключено.
14. Принудительное охлаждение вспомогательным двигателем переменного тока широко используется для улучшения охлаждения двигателя на пониженных скоростях.
15. Особое внимание следует уделить точному расположению щеток, полюсов и коллекторов.
Преимущества и недостатки тиристорного управления:
Тиристорное управление имеет следующие преимущества и недостатки:
Преимущества:
1. Реакция устройства управления быстрее, так как устраняется временная задержка, вносимая индуктивностями поля генератора и якоря.
2. Благодаря низкому падению напряжения на тиристоре эффективность системы управления высока.
3. Устройство управления меньше по размеру, легче по весу, дешевле по стоимости, занимает меньше места и требует минимального обслуживания.
4. Простое и надежное управление.
Недостатки:
1. Из-за более высокой пульсации на выходе преобразователя возникают серьезные проблемы с нагревом и коммутацией двигателя.
2. Из-за коммутационного действия тиристоров и несинусоидальности тока больше вероятность помех в сетях связи.
Во всех приводных системах с регулируемой скоростью силовой электронный преобразователь действует как интерфейс, который принимает электроэнергию от существующего источника и преобразует ее контролируемым образом в подходящую форму, совместимую с конкретной нагрузкой или процессом, для которого она используется. Основными источниками электроэнергии являются: Однофазный или трехфазный переменный ток 50 Гц от коммунальных сетей и постоянный ток от аккумуляторных батарей или солнечных батарей. Требуются четыре основные формы преобразования энергии: переменный ток в постоянный, постоянный в постоянный, постоянный в переменный и переменный в переменный.
Современные преобразователи компактны, дешевы, надежны, долговечны, гибки и полностью управляемы. Они также нуждаются в меньшем обслуживании. Они подходят для всех четырех основных форм преобразования энергии, упомянутых выше, через выпрямители (переменный/постоянный ток), прерыватели (постоянный/постоянный ток), инверторы (постоянный/переменный ток) и циклопреобразователи или регуляторы переменного тока (переменный/переменный ток).
Для управления двигателем постоянного тока регулируемая мощность постоянного тока от источника переменного тока постоянного напряжения получается с помощью управляемых выпрямителей (обычно называемых преобразователями) с использованием тиристоров и диодов. Управление постоянным напряжением достигается путем изменения фазового угла, при котором тиристоры запускаются, относительно формы волны приложенного переменного напряжения. Эта схема управления известна как фазовое управление.
В другой системе управления, известной как управление интегральным циклом, ток от источника переменного тока стробируется в течение нескольких полных циклов, а затем гасится в течение следующих нескольких циклов, причем процесс повторяется непрерывно. Управление осуществляется путем регулировки соотношения длительности включения и выключения. Этот метод подходит для управления двигателями постоянного тока мощностью в несколько кВт.
Преобразователи с фазовым управлением просты в эксплуатации и дешевле, так как не требуют дополнительных схем для процесса коммутации. В таких преобразователях достигается естественная коммутация, т. е. при включении входящего тиристора он сразу же смещает в обратном направлении выходящий тиристор и отключает его.
В таких преобразователях достигается естественная коммутация, т. е. при включении входящего тиристора он сразу же смещает в обратном направлении выходящий тиристор и отключает его.
Методы фазового управления и управления интегральным циклом также применимы для двигателей переменного тока, в которых не требуется схема преобразователя.
Управление двигателями постоянного тока, питающимися от источника постоянного тока, осуществляется с помощью тиристорной схемы переключения, называемой прерывателем. В схемах прерывателя управление средним напряжением достигается за счет изменения соотношения продолжительности включения и выключения, в течение которого на двигатель подается напряжение питания постоянного тока. Это обеспечивает эффективное и бесступенчатое управление двигателями постоянного тока.
Двигатель также может работать в режиме рекуперативного торможения. Вместо схем преобразователя можно использовать неуправляемый выпрямитель, обеспечивающий постоянное постоянное напряжение, за которым следует прерыватель, обеспечивающий переменное среднее постоянное выходное напряжение. Контроллер прерывателя требует принудительной коммутации тиристора.
Контроллер прерывателя требует принудительной коммутации тиристора.
Для управления двигателями переменного тока, питающимися от источника постоянного тока, используются инверторы на основе тиристоров, транзисторов или полевых МОП-транзисторов. Такие схемы переключения передают энергию от источника постоянного тока к нагрузке переменного тока с переменной частотой и/или переменным напряжением. Из-за операции переключения формы сигналов переменного напряжения ступенчатые, гармоники которых отфильтровываются. Поскольку источником питания обычно является переменный ток, полная схема получения мощности с переменным напряжением и частотой включает использование как инвертора, так и преобразователя.
Циклоконвертер представляет собой блок управления для обеспечения переменного напряжения и мощности непосредственно от источника фиксированной частоты без необходимости использования промежуточного каскада постоянного тока. Механизм управления напряжением и частотой представляет собой комбинацию механизмов, используемых в преобразователях с фазовым управлением и инверторах с импульсной модуляцией.