Типи електродвигунів, принципи їх роботи та особливості
Складно недооцінити роль сучасних електродвигунів. Це промислові і побутові агрегати, що виконують різну роботу: від забезпечення працездатності будівельної техніки до виконання виробничих завдань. На українському ринку великою популярністю користуються мотори змінного струму. Це однофазні і трифазні агрегати, які використовуються в різних умовах. Особливо затребувана серія АИР. У деяких випадках доречніше застосування електродвигунів постійного струму. Вони володіють унікальними особливостями. Сьогодні ми обговоримо типи моторів, чим відрізняються різні моделі (числом оборотів, кліматичним виконанням і ін), звернемо увагу на серію асинхронних двигунів АИР.
Види електричних двигунів і принципи їх роботи
Електродвигуном називають пристрій, що перетворює електричну енергію в механічну. Саме тому його ключовими характеристиками є потужність і число оборотів в хвилину. Переважна більшість однофазних, трифазних та інших моторів складається з двох частин: ротора і статора. Подаючи електрика на даний агрегат, можна домогтися обертання рухомого елемента.
Подаючи електрика на даний агрегат, можна домогтися обертання рухомого елемента.
Існує безліч способів класифікації електродвигунів. Початковим є поділ за типом живлення. Виділяють два види двигунів:
- постійного струму;
- змінного струму.
Чим відрізняються вони один від одного у використанні? Двигуни постійного струму характеризуються рівномірним обертанням. Їх встановлюють в електротранспорті, бурових верстатах, підйомно-транспортних машинах і т. д. Двигуни змінного струму дешевше у виготовленні, надійніше в експлуатації. Вони також поділяються на різні додаткові типи:
- побутові та промислові;
- синхронні і асинхронні;
- однофазні і трифазні.
Яскравим представником пристроїв даного типу є електродвигун АИР. Це асинхронний двигун змінного струму, який знайшов собі застосування в промисловій та побутовій сфері. Двигуни АИР випускаються як в однофазному (живляться від мережі 220 В), так і в трифазному виконанні. На ринку можна знайти безліч подібних моторів з різним числом обертів. Якщо говорити про те, чим відрізняються електродвигуни АИР від інших схожих типів агрегатів, то тут можна виділити компактні габарити, простоту конструкції, легкість обслуговування. Більш докладно ці однофазні і трифазні пристрої розглянемо в іншому розділі статті.
Якщо говорити про те, чим відрізняються електродвигуни АИР від інших схожих типів агрегатів, то тут можна виділити компактні габарити, простоту конструкції, легкість обслуговування. Більш докладно ці однофазні і трифазні пристрої розглянемо в іншому розділі статті.
Двигуни постійного струму
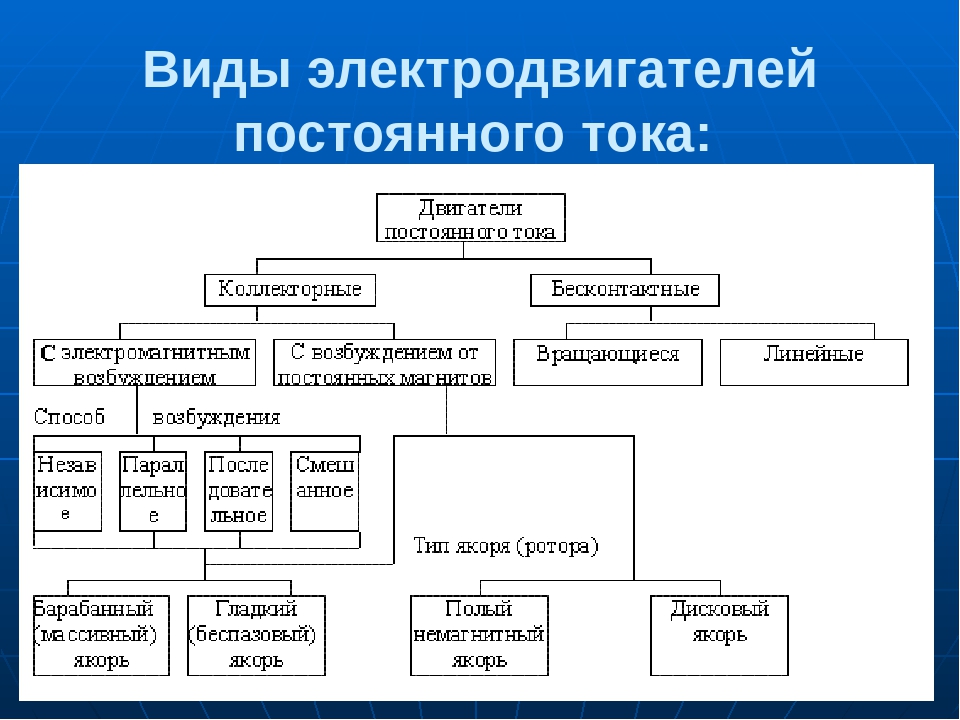
Обговорюючи типи сучасних електродвигунів, прийнято починати з пристроїв постійного струму. Це складні пристрої, здатні видавати велику потужність і кількість обертів. За характером порушення вони поділяються на:
- незалежні;
- паралельні;
- послідовні;
- змішані.
У кожного типу є свої особливості і рекомендацію по застосуванню. Наприклад, двигуни з незалежним збудженням не можна запускати без навантаження. Дотримання правил експлуатації — гарантія стабільної та ефективної роботи двигуна постійного струму.
До основних переваг даних агрегатів відносять:
- екологічність і надійність;
- швидкий запуск, легке управління;
- компактні габарити і просту конструкцію.


Чим відрізняються електродвигуни цього типу від двигунів змінного струму? Основний момент — можливість плавного регулювання швидкості обертання (кількості оборотів) вала. Саме це визначає якість побутове та промислове застосування даних машин.
Електродвигуни змінного струму
Як ми вже говорили, електродвигуни змінного струму є найбільш затребуваними. Їх частіше можна зустріти як в побутових, так і в промислових умовах. Вони поділяються на синхронні та асинхронні, бувають однофазними і трифазними. Розглянемо кожен тип більш докладно.
Синхронні двигуни змінного струму
Почнемо з синхронних пристроїв. Число оборотів в хвилину їх ротора дорівнює частоті обертання МП. Це забезпечує стабільну швидкість двигунів даного типу. Застосування досить широко: компресори, насоси, генератори, вентилятори і т. д.
Особливості асинхронних електродвигунів
В асинхронних електродвигунах частота обертання магнітного поля не співпадає з кількістю оборотів в хвилину ротора.
- універсальність до експлуатації;
- величезна різноманітність моделей;
- ремонтопридатність, надійність корпусу;
- невеликі габарити при високій потужності;
- низький рівень видаваного шуму;
- високий ККД і тривалий термін служби.
Вибираючи однофазні або трифазні асинхронні двигуни АИР, враховуйте особливості місця їх застосування. Ці промислові та побутові агрегати випускаються в різних кліматичних виконаннях. Тому вивчаючи їх характеристики, звертайте увагу не тільки на потужність і число обертів.
Однофазні та трифазні, синхронні і асинхронні, АИР або інших серій — електродвигуни застосовуються в побутовій і промисловій сфері, де полегшують працю людини і вирішують завдання, які без них нездійсненні.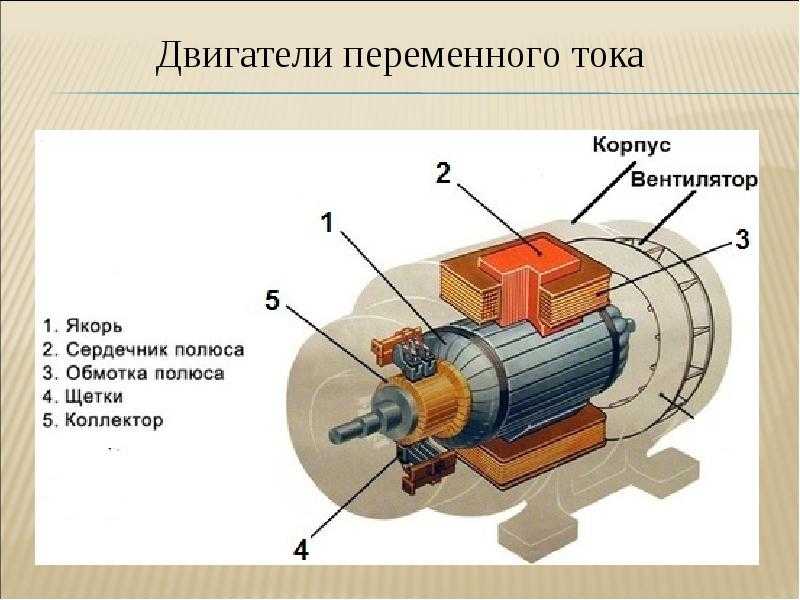
Электродвигатели переменного тока WEG WEG W22 IE3 200027590
К наиболее эффективным устройствам, образующим механическую энергию из электрической относится асинхронный двигатель. Асинхронный электродвигатель постоянного тока – это устройство, имеющее в своём строении вращающийся ротор. При этом в данном агрегате скорость оборотов магнитного поля ротора отличается от его собственной скорости вращения, что составляет ключевую особенность работы асинхронного двигателя. Исходя именно из такой особенности двигатель получил дополнительную составляющую «асинхронный», ведь если скорость в агрегате выровняется, тогда действие силы на основную (роторную) часть и наведение тока магнитным полем прекратится.
Устройство асинхронного электродвигателя
Устройство самого агрегата имеет в своём составе следующие ключевые компоненты:
- Ротор, который может быть, как фазным, так и короткозамкнутым. Первый вариант включает в себя трёхфазную обмотку и наиболее часто имеет соединение «звездой». Второй же тип ротора представлен сердечник, имеющий стержни из алюминия, которые коротко изолированы так называемой «беличьей клеткой» – торцевыми кольцами;
- Конструктивные составляющие (детали) – подшипники, крыльчатку, вал, лапы, вентиляторный кожух, подшипниковые шиты и коробку выводов – которые собственно и обеспечивают устройству охлаждение, вращение и защиту всего механизма;
- Статор, состоящий из стальных листов. Во включённом в устройство ротора сердечнике имеются пазы, в которые в свою очередь уложены обмотки. Их оси сдвинуты по отношению друг к другу на 120°.
 Второй же тип ротора представлен сердечник, имеющий стержни из алюминия, которые коротко изолированы так называемой «беличьей клеткой» – торцевыми кольцами;
Второй же тип ротора представлен сердечник, имеющий стержни из алюминия, которые коротко изолированы так называемой «беличьей клеткой» – торцевыми кольцами;Принцип работы ассинхронного электродвигателя
Перед тем, как купить асинхронный электродвигатель, вам стоит узнать о его принципе работы поближе.
Сам принцип работы агрегата уже заложен в его присоединённом прилагательном слове «асинхронный», что обозначает несинхронную работу. Из него следует, что при включении устройства, имеющиеся в нём ротор и статор, образуют вращающиеся магнитные поля. Эти поля создаются с отличающимися частотами. При этом магнитные поля от частоты вращения ротора во всех случаях меньше, чем частоты от тех же полей, но образующихся от статора.
Эти поля создаются с отличающимися частотами. При этом магнитные поля от частоты вращения ротора во всех случаях меньше, чем частоты от тех же полей, но образующихся от статора.
Для более детального усвоения принципа работы асинхронного двигателя, вы можете для себя визуально представить такой процесс в голове или на реальном примере в жизни: возьмите в руки постоянный магнит и медный диск. Положите медный диск на стол, а магнит вращайте несколько раз вокруг своей оси: вы сразу же заметите, что диск стал вращаться вслед за магнитом, но с небольшой задержкой. Так в структуре медного диска порождаются так называемые индукционные токи (Фуко), которые осуществляют своё движение по замкнутому кругу. При этом в нём образуется личное магнитное поле, которое в последующем и взаимодействует с магнитным полем от самого магнита.
В случае с асинхронным двигателем для создания такого вращающегося поля применяются статорные обмотки, а образуемый ими магнитный поток, порождает в проводниках ротора ЭДС. Взаимодействие же тока Фуко и статорного магнитного поля внутри самой обмотки ротора образует электромагнитную силу, которая в дальнейшем приводит вращение вала в действие.
Взаимодействие же тока Фуко и статорного магнитного поля внутри самой обмотки ротора образует электромагнитную силу, которая в дальнейшем приводит вращение вала в действие.
Сферы применения ассинхронных двигателей
Область применения асинхронных электродвигателей затрагивает все сферы жизнедеятельности человека. К примеру, те виды устройств, которые работают от одной фазы, встречаются в эл. инструментах, бытовой технике и любых механизмах с малой мощностью работы. Это могут быть следующие:
- Кухонная вытяжка;
- Домашний вентилятор;
- Советские стиральные машины;
- Триммеры;
- И прочие предметы.
В промышленности такие типы двигателей можно найти также в системах вентиляции, насосах или компрессорах, механизмах лебёдок и кранов, в металло- и деревообрабатывающих станках и так далее. К тому же сегодня такие устройства активно применяются и в электротранспорте.
Купить асинхронный электродвигатель в компании «Салютех»
Если вы желаете приобрести асинхронный электродвигатель, но всё ещё не знаете куда обратиться – компания «Салютех» рада приветствовать вас в своём интернет-магазине. Здесь вы найдёте широкий спектр товаров для промышленности и личного применения, а также огромное количество деталей и оборудования для ваших устройств. Электродвигатель асинхронный, цена которого ниже, чем где-либо есть только на «Салютех»!
Здесь вы найдёте широкий спектр товаров для промышленности и личного применения, а также огромное количество деталей и оборудования для ваших устройств. Электродвигатель асинхронный, цена которого ниже, чем где-либо есть только на «Салютех»!
Среди множества наименований товаров здесь вы можете найти асинхронные двигатели любой мощности, любого назначения и в различной ценовой категории. Доставка товаров активна различными способами по всей территории Российской Федерации и за её пределами!
Поспешите приобрести максимально качественное оборудование, которое прослужит вам долгие годы, вместе с Салютех!
Основы двигателей переменного тока и их применение
Двумя основными типами двигателей переменного тока являются асинхронные двигатели и синхронные двигатели. Асинхронный двигатель (или асинхронный двигатель) всегда зависит от небольшой разницы в скорости между вращающимся магнитным полем статора. Скорость вала ротора называется скольжением, чтобы индуцировать ток ротора в обмотке переменного тока ротора.
Синхронный двигатель, напротив, не зависит от индукции скольжения. В нем используются постоянные магниты, выступающие магнитные полюса (обычно сделанные из стальных пластин и называемые явно выраженными полюсами) или обмотка ротора с независимым возбуждением. Синхронный двигатель развивает свой номинальный крутящий момент точно на синхронной скорости.
Общая классификация двигателей. Двумя основными классификациями двигателей переменного тока являются синхронные и асинхронные (также называемые индукционными). (Изображение: Monolithic Power Systems) Наиболее распространенные однофазные двигатели переменного тока используют короткозамкнутый ротор, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока. Двигатель получил свое название от формы «обмоток» его ротора — кольца на обоих концах ротора с стержнями, соединяющими кольца по всей длине ротора. Обычно это литой алюминий или медь, залитая между металлическими пластинами ротора, и обычно видны только торцевые кольца. Большая часть тока ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Для стержней и торцевых колец типичны очень низкие напряжения при очень высоких токах; В высокоэффективных двигателях часто используется литая медь для уменьшения сопротивления ротора.
Обычно это литой алюминий или медь, залитая между металлическими пластинами ротора, и обычно видны только торцевые кольца. Большая часть тока ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Для стержней и торцевых колец типичны очень низкие напряжения при очень высоких токах; В высокоэффективных двигателях часто используется литая медь для уменьшения сопротивления ротора.
Простые индукционные машины напрямую подключаются к сети. Типичная характеристика скорости вращения при постоянной частоте статора и напряжении на клеммах показана на рисунке ниже. Синхронная скорость соответствует скорости вращения магнитного поля статора. Машина не создает крутящего момента на синхронной скорости, потому что в обмотках ротора не индуцируется ток. Если ротор вращается с меньшей скоростью, чем поле статора, машина работает в моторном режиме. В противном случае машина работает в режиме генератора. Максимальный крутящий момент, который может быть получен на валу двигателя, называется крутящим моментом.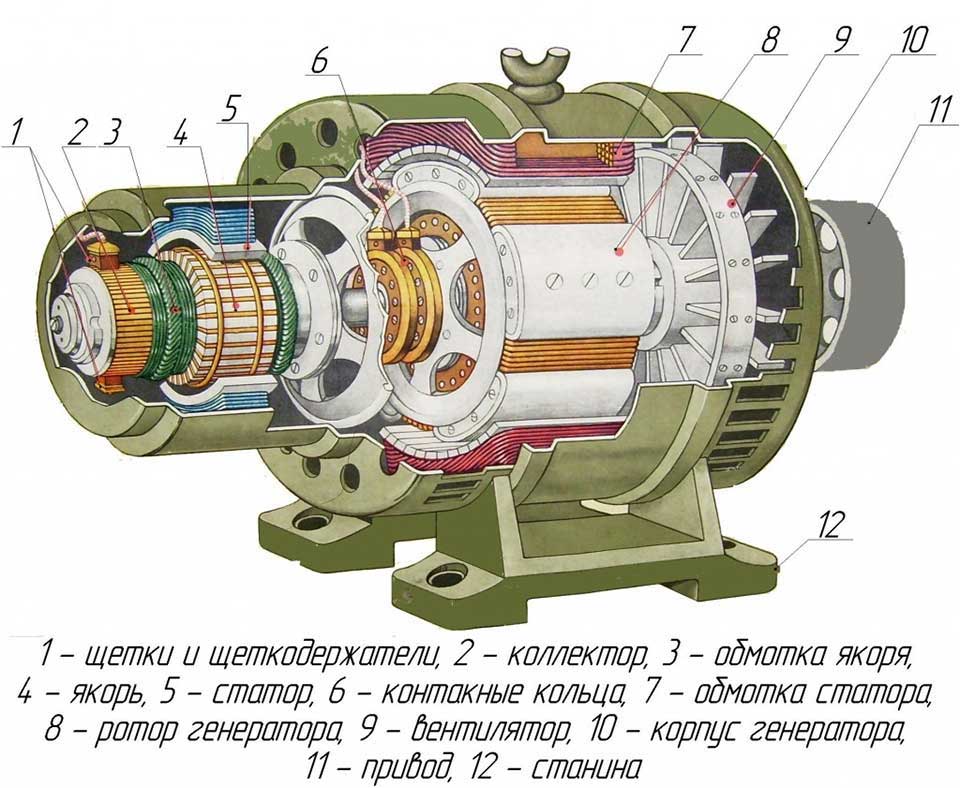
Альтернативная конструкция, называемая фазным ротором, используется, когда требуется переменная скорость. В этом случае ротор имеет такое же количество полюсов, как и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки соединяют токосъемные кольца с контроллером, таким как переменный резистор, который позволяет изменять коэффициент скольжения двигателя. В некоторых мощных приводах с фазным ротором с регулируемой скоростью энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор. При двунаправленном управлении мощностью ротор с обмоткой становится активным участником процесса преобразования энергии, при этом конфигурация с двойным питанием от ротора с обмоткой обеспечивает удвоенную плотность мощности.
По сравнению с роторами с короткозамкнутым ротором двигатели с фазным ротором дороже и требуют обслуживания контактных колец и щеток. Они все еще были стандартной формой для управления переменной скоростью до появления компактных электронных устройств. Твердотельные инверторы с частотно-регулируемым приводом теперь могут использоваться для управления скоростью, а двигатели с фазным ротором становятся все менее распространенными.
Асинхронные двигатели с большим фазным ротором (WRIM) — это хорошо зарекомендовавшая себя технология для промышленного применения. В цементной и горнодобывающей промышленности WRIM высокой мощности используются на крупных мельницах, где они имеют преимущество контролируемых пусковых характеристик и возможности регулировки скорости. Эти двигатели также используются на больших насосах в сфере водоснабжения и очистки сточных вод.
WRIM имеет трехфазный статор, который обычно подключается непосредственно к системе питания. Ротор имеет трехфазную обмотку с тремя выводами, подключенными к отдельным токосъемным кольцам, которые традиционно подключались к реостату или блоку резисторов. Реостат использовался для запуска и мог быть отключен, как только двигатель набрал скорость. Изменяя сопротивление ротора с помощью реостата, можно изменить скорость двигателя. Твердотельные накопители все чаще заменяют реостаты для управления двигателем в этих приложениях.
Реостат использовался для запуска и мог быть отключен, как только двигатель набрал скорость. Изменяя сопротивление ротора с помощью реостата, можно изменить скорость двигателя. Твердотельные накопители все чаще заменяют реостаты для управления двигателем в этих приложениях.
Синхронные двигатели
Существует несколько вариантов конструкции синхронных двигателей, включая синусоидальные, реактивные, шаговые и гистерезисные. Общим знаменателем является то, что вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и обеспечивает второе синхронизированное вращающееся магнитное поле двигателя переменного тока. Асинхронный двигатель называется двигателем с двойным питанием, если он оснащен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Небольшие синусоидальные синхронные двигатели обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время. В более мощных промышленных установках синхронный двигатель выполняет две важные функции: Это высокоэффективное средство преобразования энергии переменного тока в работу. И он может работать с опережающим или единичным коэффициентом мощности и, таким образом, обеспечивать коррекцию коэффициента мощности.
Реактивный двигатель представляет собой тип электродвигателя, который индуцирует непостоянные магнитные полюса на ферромагнитном роторе. Ротор не имеет обмоток. Он генерирует крутящий момент за счет магнитного сопротивления. Подтипы реактивных двигателей включают синхронные, переменные, переключаемые и переменные шаговые. Реактивные двигатели могут обеспечивать высокую удельную мощность при низкой стоимости, что делает их привлекательными для многих приложений. К недостаткам относятся высокая пульсация крутящего момента (разница между максимальным и минимальным крутящим моментом за один оборот) при работе на низкой скорости и шум из-за пульсаций крутящего момента.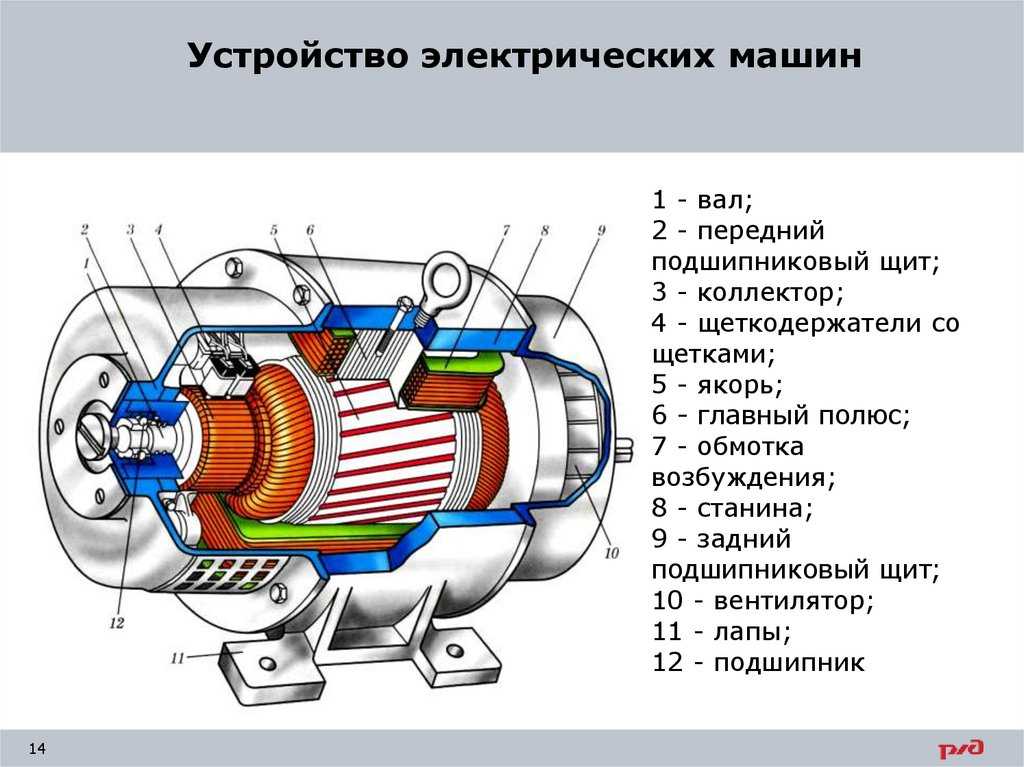 Импульсные реактивные двигатели могут использоваться как очень большие шаговые двигатели с уменьшенным числом полюсов и, как правило, коммутируются по замкнутому контуру. Обычные шаговые двигатели представляют собой разновидность бесщеточных двигателей постоянного тока (BLDC).
Импульсные реактивные двигатели могут использоваться как очень большие шаговые двигатели с уменьшенным числом полюсов и, как правило, коммутируются по замкнутому контуру. Обычные шаговые двигатели представляют собой разновидность бесщеточных двигателей постоянного тока (BLDC).
Гистерезисные двигатели имеют сплошной гладкий цилиндрический ротор, отлитый из магнито-твердой кобальтовой стали с высокой коэрцитивной силой. Этот материал имеет широкую петлю гистерезиса (высокую коэрцитивную силу), что означает, что после намагничивания в заданном направлении требуется большое обратное магнитное поле для изменения намагниченности. Вращающееся поле статора заставляет каждый небольшой объем ротора испытывать реверсивное магнитное поле. Из-за гистерезиса фаза намагниченности отстает от фазы приложенного поля. Результатом этого является то, что ось магнитного поля, индуцированного в роторе, отстает от оси поля статора на постоянный угол δ, создавая крутящий момент, когда ротор пытается «догнать» поле статора.
Преимущество гистерезисного двигателя заключается в том, что, поскольку угол запаздывания δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Следовательно, он самозапускающийся и для его запуска не требуется индукционная обмотка. Двигатели с гистерезисом производятся с номинальной мощностью долей лошадиных сил, в основном в качестве серводвигателей и синхронизирующих двигателей. Более дорогие, чем реактивные, гистерезисные двигатели используются там, где требуется точная постоянная скорость.
Синхронные двигатели с постоянными магнитами (PMSM) обеспечивают более высокий КПД по сравнению с асинхронными двигателями переменного тока и двигателями BLDC. (Изображение: Эмбител) Синхронный двигатель с постоянными магнитами (СДПМ) использует постоянные магниты, встроенные в стальной ротор, для создания постоянного магнитного поля. Статор содержит обмотки, подключенные к источнику переменного тока для создания вращающегося магнитного поля (асинхронный двигатель). При синхронной скорости полюса ротора замыкаются на вращающемся магнитном поле. Синхронные двигатели с постоянными магнитами аналогичны двигателям BLDC.
При синхронной скорости полюса ротора замыкаются на вращающемся магнитном поле. Синхронные двигатели с постоянными магнитами аналогичны двигателям BLDC.
PMSM в сравнении с производительностью BLDC
Двигатель PMSM можно рассматривать как аналог двигателя переменного тока BLDC. Как и BLDC, PMSM имеет ротор с постоянными магнитами и статор с обмоткой. Работа двигателя PMSM также очень похожа на двигатель BLDC. Однако разница заключается в форме волны обратной ЭДС, которая носит синусоидальный характер. Это связано с тем, что катушки намотаны на статоре синусоидально.
Двигатель PMSM генерирует синусоидальную противоЭДС, в то время как BLDC генерирует трапецеидальную волну противоЭДС. (Изображение: Texas Instruments)PMSM требует питания переменного тока (синусоидального характера) для достижения наилучшей производительности. Этот тип управляющего тока также снижает шум, создаваемый двигателем. Преимущества двигателей PMSM:
- Более высокая эффективность, чем у бесщеточных двигателей постоянного тока
- Отсутствие пульсаций момента при коммутации двигателя
- Более высокий крутящий момент и лучшая производительность
- Более надежный и менее шумный, чем другие асинхронные двигатели
- Высокая производительность как при высокой, так и при низкой скорости работы
- Низкая инерция ротора облегчает управление
- Эффективное рассеивание тепла
- Уменьшенный размер двигателя
Стандарты эффективности двигателей переменного тока
Международный стандарт IEC/EN 60034-30 делит эффективность двигателей на пять классов: от IE1 до IE5. Национальная ассоциация производителей электрооборудования (NEMA) имеет соответствующую рейтинговую шкалу от «стандартной эффективности» до «ультра-премиальной» эффективности. Использование электронных приводов необходимо для соответствия более высоким стандартам эффективности. Простые асинхронные двигатели переменного тока с электронными приводами могут соответствовать требованиям IE3 и IE4, тогда как СДПМ необходимы для соответствия уровням эффективности IE5.
Национальная ассоциация производителей электрооборудования (NEMA) имеет соответствующую рейтинговую шкалу от «стандартной эффективности» до «ультра-премиальной» эффективности. Использование электронных приводов необходимо для соответствия более высоким стандартам эффективности. Простые асинхронные двигатели переменного тока с электронными приводами могут соответствовать требованиям IE3 и IE4, тогда как СДПМ необходимы для соответствия уровням эффективности IE5.
Разница между классами эффективности IE больше для двигателей меньшего размера. Например, для двигателя мощностью 1 кВт увеличение эффективности между IE1 и IE3 составляет около 13%. Для двигателя мощностью 10 кВт повышение эффективности между IE1 и IE3 составляет всего около 6%
Как отмечалось выше, электронные приводы необходимы для соответствия более высоким стандартам эффективности. Приводы и контроллеры двигателей переменного тока будут в центре внимания четвертого и последнего часто задаваемых вопросов в этой серии.
Приводы и контроллеры двигателей переменного тока будут в центре внимания четвертого и последнего часто задаваемых вопросов в этой серии.
Справочные материалы
Бесколлекторный двигатель постоянного тока и СДПМ, Embitel
Руководство по двигателю, Infineon Technologies
Основы двигателей и двигатели постоянного тока
Поле-ориентированное управление двигателем, часть 2: реализация
Управление двигателем с ориентацией на поле, Часть 1: Принципы
Основные сведения об электродвигателях переменного, постоянного и ЕС-двигателей (часть 2)…
Основы электродвигателей переменного, постоянного и постоянного тока, часть 1 —…
Типы двигателей переменного тока и их использование в реальной жизни
Переменный или переменный ток — это то, что энергетические компании передают нам по электрическим проводам. Он в основном используется в системах распределения электроэнергии по многим причинам. Но самая важная причина в том, что его можно очень легко преобразовать из одного напряжения в другое. Поскольку он движется в обоих направлениях, трансформаторы могут повышать и понижать напряжение.
Но самая важная причина в том, что его можно очень легко преобразовать из одного напряжения в другое. Поскольку он движется в обоих направлениях, трансформаторы могут повышать и понижать напряжение.
Этот ток используется в двигателях переменного тока для преобразования в механическую энергию на валу. Преобразование электрической энергии в механическую происходит через связующую среду магнитного потока. Этот поток создается в воздушном зазоре двигателя переменного тока, где подводимая электрическая энергия преобразуется в механическую энергию. По этой причине двигатель переменного тока известен как электромагнитное устройство.
Поскольку существуют различные типы двигателей переменного тока, очень важно знать о различных классификациях, чтобы идеально соответствовать спросу. Двигатель переменного тока можно классифицировать по различным признакам.
Классификация двигателей переменного тока на основе принципа действия
a. Синхронный двигатель В этом типе двигателя переменного тока вращение вала синхронизировано с частотой питающего тока. Период его вращения в точности равен целому числу циклов переменного тока. Этот двигатель содержит многофазный электромагнит переменного тока на статоре для создания магнитного поля, которое может вращаться в такт колебаниям линейного тока.
Период его вращения в точности равен целому числу циклов переменного тока. Этот двигатель содержит многофазный электромагнит переменного тока на статоре для создания магнитного поля, которое может вращаться в такт колебаниям линейного тока.
В результате ротор дает второе синхронно вращающееся магнитное поле. Этот двигатель не используется для привода нагрузки. Но для улучшения коэффициента мощности местной сети, к которой он подключен, он может действовать как синхронный конденсатор. Он также используется в высокоточных устройствах позиционирования, таких как современные роботы.
б. Асинхронный двигатель В этом типе двигателя переменного тока электромагнитная индукция от магнитного поля обмотки статора создает электрический ток в роторе, необходимый для создания крутящего момента. Вот почему этот двигатель может быть изготовлен без электрических соединений с ротором. Альтернативное название асинхронного двигателя — «асинхронный двигатель». В этом двигателе обмотка якоря служит как обмоткой якоря, так и обмоткой возбуждения.
В этом двигателе обмотка якоря служит как обмоткой якоря, так и обмоткой возбуждения.
В воздушном зазоре возникает поток, когда обмотки статора подключены к сети переменного тока. Этот поток вращается с фиксированной скоростью, которая индуцирует напряжения в статоре и обмотке ротора. Крутящий момент создается, когда цепь ротора замкнута, потому что ток реагирует с вращающимся потоком.
Этот асинхронный двигатель является наиболее распространенным типом двигателя переменного тока. Он используется для различных видов насосов, компрессоров и выступает в качестве первичных двигателей для многих машин. По конструкции ротора эти двигатели делятся на два типа: короткозамкнутые и фазные.
Классификация двигателей переменного тока по роду тока
a. Однофазный Если двигатель переменного тока имеет один статор, это однофазный двигатель. У него нет вращающегося магнитного поля. Вместо вращения обмотка статора создает пульсирующее поле. Тогда поле статора создает токи в роторе, когда он находится в состоянии покоя.
Тогда поле статора создает токи в роторе, когда он находится в состоянии покоя.
Ток создает противоположную полярность, которая прикладывает вращающую силу к верхней и нижней частям ротора. Ротор остается неподвижным, потому что сила остается одинаковой в каждом направлении.
A Однофазный двигатель в основном используется для преобразования небольшой мощности, так как он почти крошечного размера. Почти все бытовые приборы, такие как холодильники, вентиляторы, стиральные машины, фены, переносные электроинструменты, миксеры, шлифовальные машины и т. д., используют однофазный двигатель переменного тока.
б. Поли Фаза Если двигатель переменного тока состоит из двух или трехфазных двигателей, это многофазный двигатель. Этот двигатель работает с вращающимся магнитным полем, которое создается двух- или трехфазным током. Ток протекает через две или более групп катушек. Многофазный двигатель переменного тока в основном используется для мощных приложений.
Он может обеспечить массовое преобразование электрической энергии в механическую. Например, силовые приводы компрессоров, гидравлических насосов, компрессоров кондиционеров, поливных насосов и т. д.
Классификация двигателей переменного тока на основе скорости работы
a. Постоянная скоростьЭтот тип двигателя переменного тока либо имеет постоянную скорость, либо не сильно изменяется в материальном смысле. Несколькими примерами двигателей с постоянной скоростью являются синхронный двигатель, асинхронный двигатель с малым скольжением, шунтирующий двигатель постоянного тока.
Он специально разработан для адаптации к приводным шпинделям ткацких станков, генераторам постоянного тока, циркулярным пилам, печатным станкам и т. д. Как правило, он предназначен для оборудования, которому не требуется более 150 процентов крутящего момента при полной нагрузке при запуске.
б. Регулируемая скорость Если на двигателе установлен частотно-регулируемый привод или аналогичная технология для управления скоростью и крутящим моментом, это двигатель с регулируемой скоростью.