
Типы электродвигателей — Однофазные электродвигатели , электродвигатели постоянного тока, асинхронные двигатели
Заказать оборудование
Команда Electrodvigatel.com приглашает к сотрудничеству производителей двигателей
Электродвигатель – это электрическая машина, служащая для преобразования электрической энергии в механическую энергию. Электродвигатель работает на основе принципа электромагнитной индукции.
Существует множество видов электродвигателей, различающихся по конструкции, принципу действия, исполнению и другим характеристикам. Различают основные виды электродвигателей:
По типу протекающего тока двигатели различают:
- Электродвигатели постоянного тока. Широко используют в качестве промышленного оборудования, привода электротранспорта и микропривода исполнительных механизмов.
- Электродвигатели переменного тока. Нашли широкое применение для приводов всех типов технологического оборудования, автоматических регуляторов, электроинструментов.

По конструкции электрические машины различают с вертикально и горизонтально расположенным валом. Электродвигатели также классифицируют по мощности, климатическому исполнению, степени защиты, назначению и другим характеристикам.
Со всеми типами электродвигателей вы можете познакомиться на информационном портале по электродвигателям electrodvigatel.com. Здесь вы найдете преимущества и недостатки, того или иного электродвигателя, полный список производителей электродвигателей, а также сможете узнать стоимость на электродвигатели.
Виды электродвигателей
Однофазные электродвигатели
Трехфазные электродвигатели
Крановые электродвигатели
Лифтовые электродвигатели
Общепромышленные электродвигатели
Синхронные электродвигатели
Взрывозащищенные электродвигатели
Электродвигатели постоянного тока
Стоимость электродвигателя в основном зависит от следующих параметров:
- Габарит (высота оси вращения)
- Мощность
- Климатическое исполнение
Стоит отметить, что с увеличением габарита электродвигателя усложняется технология изготовления электрических машин, уменьшается серийность выпуска и, соответственно, меняется экономика и ценообразование двигателей.
Конструкция электродвигателя
Вращающийся электродвигатель состоит из двух главных деталей:
- статора — неподвижная часть
- ротора — вращающаяся часть
У большинства двигателей внутри статора располагается ротор. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Электродвигатель в разрезе — 1 статор, 2 ротор, 3 подшипник
Условное обозначение электродвигателей
1 – тип электродвигателя:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
2 — электрические модификации:
|
Электрические модификации |
Определение |
|
М |
модернизированный электродвигатель: 5АМ |
|
Н |
электродвигатель защищенного исполнения с самовентиляцией: 5АН |
|
Ф |
электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ |
|
К |
электродвигатель с фазным ротором: 5АНК |
|
С |
электродвигатель с повышенным скольжением: АС, 4АС и др. |
|
Е |
однофазный электродвигатель 220V: АДМЕ, 5АЕУ |
|
В |
встраиваемый электродвигатель: АИРВ 100S2 |
|
П |
электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. |
3 — габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
4 — длина сердечника и/или длина станины:
|
Длина сердечника |
Определение |
|
А, В, С |
длина сердечника (первая длина, вторая длина, третья длина) |
|
XK, X, YK, Y |
длина сердечника статора высоковольтных двигателей |
|
S, L, М |
установочные размеры по длине станины |
5 — количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
6 — конструктивные модификации электродвигателя:
|
Модификации электродвигателя |
Определение |
|
Л |
электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4 |
|
Е |
электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 |
|
Е2 |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Б |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Ж |
электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 |
|
П |
электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 |
|
Р3 |
электродвигатель для мотор-редукторов: АИР 100L6 Р3 |
|
С |
электродвигатель для станков-качалок: АИР 180М8 СНБУ1 |
|
Н |
электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4 |
7 — климатическое исполнение электродвигателя:
|
Категория размещения |
Определение |
|
У |
умеренного климатического исполнения |
|
|
тропического исполнения |
|
УХЛ |
умеренно холодного климата |
|
ХЛ |
холодного климата |
|
ОМ |
для судов морского и речного флота |
8 — категория размещения:
|
Категория размещения |
Определение |
|
|
на открытом воздухе |
|
2 |
на улице под навесом |
|
3 |
в помещении |
|
4 |
в помещении с искусственно регулируемыми климатическими условиями |
|
5 |
в помещении с повышенной влажностью |
9 — степень защиты электродвигателя:
вторая цифра: защита от жидкостей
|
Степень защиты IP |
Определение первой цифры — защита от твердых объектов |
Определение второй цифры — защита от жидкостей |
|
0 |
без защиты |
без защиты |
|
1 |
защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
защита от вертикально падающей воды (конденсация) |
|
2 |
защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
защита от воды, пдпющей под углом 15º к вертикали |
|
3 |
защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
защита от воды, падающей под углом 60º к вертикали |
|
4 |
защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
защита от водяных брызг со всех сторон |
|
5 |
защита от пыли (без осаждения опасных материалов) |
защита от водяных струй со всех сторон |
10 – мощность электродвигателя
11 – обороты электродвигателя
12 — Монтажное исполнение электродвигателя
Двигатели переменного тока
Двигатели переменного тока подразделяются на две группы: асинхронные и синхронные. Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
- общепромышленное
- специальное (крановые, для дробилок, лифтовые и другие)
- взрывозащищенное. Дальнейшее подразделение — для химической отрасли и рудничные, рудничные специальные.
Асинхронными двигателями (АД) называют машины переменного тока, в которых основное магнитное поле создается переменным током и частота вращения ротора, не связанная жестко с частотой тока в обмотке статора, меняется с нагрузкой. Наибольшее применение получили бесколлекторные асинхронные машины, используемые главным образом в качестве электродвигателей. Значительно реже применяются коллекторные асинхронные электродвигатели — более дорогие и менее надежные в эксплуатации, чем бесколлекторные.
По количеству фаз двигатели переменного тока подразделяются:
Асинхронные двигатели наиболее распространены в настоящее время, чем другие виды электродвигателей.
Синхронные и асинхронные машины переменного тока обладают свойством обратимости — они могут работать как в режиме генератора, так и в режиме двигателя.
Какие бывают виды электродвигателей переменного тока
Содержание
- Выбор двигателя
- Асинхронные двигатели
- Синхронные двигатели
- Заключение
Как разработать двигательную установку? Для проектирования системы любого типа имеет значение кинематическая схема и эксплуатационные условия, указанные в задании. Записав требуемые технические данные, приступают к кинематическому расчету, который является исходным для силового и энергетического расчета, как отдельных механизмов, так и всей системы. Чтобы к установке правильно подобрать электрический двигатель надо понимать из чего можно выбрать. Поэтому ниже рассмотрим какими они бывают.
Выбор двигателя
Выбор электродвигателя того или иного типа осуществляется на основе технических расчетов, которые выполняются в установленной последовательности:
- расчет мощности и ориентировочный выбор агрегата;
- проверка мотора по пусковым параметрам, перегрузке и нагреву.
Требуемая мощность, скорость и другие параметры определяются на основании исходных данных – рабочих характеристик машины. Значения КПД отдельных узлов кинематической цепи должны соответствовать приведенным данным справочных таблиц.
Значения КПД отдельных узлов кинематической цепи должны соответствовать приведенным данным справочных таблиц.
В зависимости от принципа работы существуют следующие типы электродвигателей:
- асинхронники,
- синхронники.
Любой тип может быть одно-, двух- или трёхфазным. Трехфазные моторы составляют около 70% двигательной техники в промышленности. Однофазные также очень широко применяются в индустрии и составляют около 10-15% моторов.
Асинхронные двигатели
В асинхронных агрегатах весь процесс опирается на небольшую разницу в скорости между магнитными полями статора и ротора, вызывающую ток в обмотке ротора. Расчет мощности и предварительный выбор мотора производится по эквивалентному моменту сопротивления и частоте. Асинхронные двигатели бывают с короткозамкнутым и фазным ротором, как показано на структурной схеме.
Все основные параметры (обмотка, пазы статора) асинхронного мотора имеют соответствующие соотношения. Определиться с выбором техники помогают предварительный и проверочный расчёт основных параметров.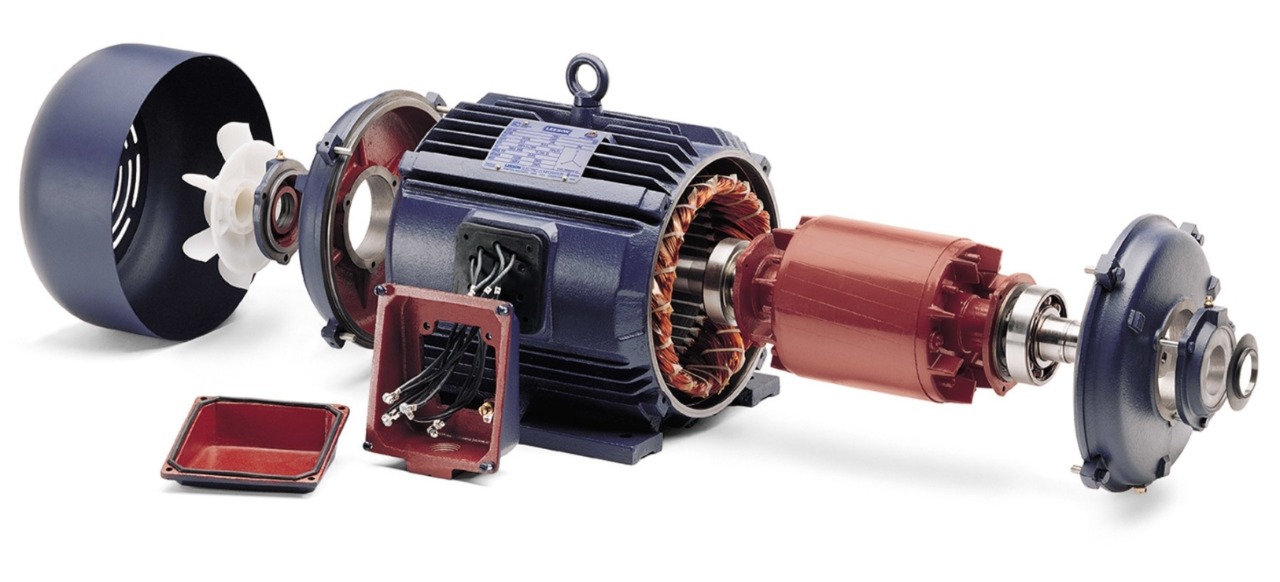
Однофазные асинхронные моторы бывают бытового назначения, потребляемая мощность их обычно невелика. К ним относятся:
- вентиляторы,
- кондиционеры,
- стиральные машины,
- компрессоры холодильников,
- водяные насосы.
Трехфазные асинхронные двигатели используются там, где необходимо большое количество электроэнергии, например, в стартерах, гидравлических насосах. Приводы переменного тока становятся все популярнее с каждым годом.
Синхронные двигатели
Расчет начальных условий для синхронных двигателей здесь не особенно важен, потому что процесс эксплуатации не основан на скольжении и индукции. Синхронные двигатели бывают:
- с электромагнитным возбуждением;
- с постоянными магнитами;
- реактивные, гистерезисные.
Однофазные синхронные электродвигатели являются распространенными источниками питания для работы электрических часов и другого мелкого высокоточного оборудования. Они требуют применения некоторого вспомогательного метода, чтобы довести их до синхронной скорости, то есть, чтобы запустить их. Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Работа трехфазных синхронных электродвигателей при постоянной синхронной скорости чаще используется для работы в системах синхронизатора.
Электродвигатели переменного тока различаются в зависимости:
- от скорости работы – постоянной, переменной и регулируемой;
- от конструктивных особенностей, то есть могут быть открытыми, полузакрытыми, вентилируемыми и т.д.
Если говорить про другие виды электродвигателей переменного тока, выпускаемые современной промышленностью, то, несмотря на широкое разнообразие, все они относятся к механически коммутируемым машинам, в которых скорость зависит от напряжения и соединения обмоток.
Заключение
Электродвигатели и приводы широко применяются в различных сферах. Электромоторы переменного тока являются надёжными, недорогими, обладают хорошими эксплуатационными качествами. Низковольтные приводы переменного тока имеют прекрасную репутацию, а количество установленных и эксплуатируемых приводов исчисляется уже на сотни. Способ управления машинами с помощью привода обладает достоинствами с точки зрения экономии энергии и совершенствования технологических процессов.
Способ управления машинами с помощью привода обладает достоинствами с точки зрения экономии энергии и совершенствования технологических процессов.
Основы выбора двигателя: Типы двигателей переменного/постоянного тока
Какой тип электродвигателя вы выбираете для своего конвейера, стола XYZ или робота? Прежде чем выбрать один, вы должны понять характеристики каждого типа двигателя на рынке.
Типы электродвигателей
Существует два очевидных типа электродвигателей в зависимости от входного напряжения: переменного тока (переменного тока) или постоянного тока (постоянного тока).
В то время как двигатели переменного тока используют переменный ток для питания ряда намотанных катушек, двигатели постоянного тока используют постоянный ток для питания угольных щеток или электрической коммутации.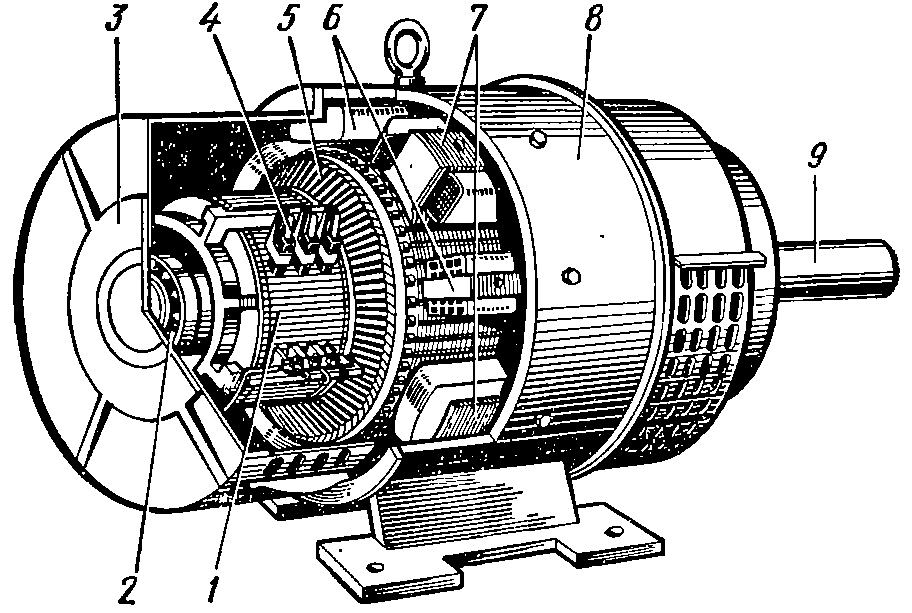 Двигатели постоянного тока, как правило, более эффективны и компактны, чем двигатели переменного тока.
Двигатели постоянного тока, как правило, более эффективны и компактны, чем двигатели переменного тока.
Важно понимать не только различия между характеристиками двигателей переменного и постоянного тока, но и конкретные типы внутри этих категорий.
Помните, что некоторые производители могут предлагать как двигатели, так и приводы. Даже если двигатель постоянного тока, его драйвер может содержать внутренний источник питания, поэтому драйверы с входом переменного тока могут легко управлять двигателями постоянного тока с источником питания переменного тока.
Теперь давайте углубимся в двигатели переменного и постоянного тока.
| Двигатели переменного тока |
Двигатели переменного тока можно разделить на четыре основные категории: с расщепленными полюсами, с расщепленной фазой, с пусковым конденсатором, с пусковым конденсатором/рабочим конденсатором и с постоянным разделенным конденсатором.
Поскольку компания Oriental Motor производит только двигатели переменного тока с постоянными конденсаторами и разделенными конденсаторами, мы рассмотрим только двигатели PSC.
Каждый тип двигателя PSC аналогичен по конструкции. В статоре имеются обмотки, а для вращения используется короткозамкнутый ротор. Конденсаторы необходимы для однофазных двигателей для создания многофазного источника питания. Эти двигатели очень просты в управлении и не требуют драйвера или контроллера для работы. Незначительные различия изменяют характеристики базового асинхронного двигателя переменного тока для удовлетворения различных потребностей в производительности, таких как различные типы тормозов.
Различные типы двигателей переменного тока «PSC»
|
Асинхронные двигатели / асинхронные двигатели
Асинхронные двигатели являются наиболее распространенными и рассчитаны на непрерывную работу. Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
На приведенном ниже рисунке показаны конструкция и конструкция асинхронного двигателя.
① Фланцевый кронштейн |
 Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке.
Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке. Как они работают
Когда двигатель включен, он создает вращающееся магнитное поле в статоре. На ротор индуцируется ток, и магнитное поле, создаваемое индуцированным током, взаимодействует с вращающимся магнитным полем, создавая вращение.
В этой записи блога можно найти дополнительную информацию об асинхронных двигателях переменного тока.
Асинхронные двигатели надежны и могут использоваться для различных приложений общего назначения, где необходима непрерывная работа, а точность остановки не имеет решающего значения. Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть удовлетворены путем объединения трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть удовлетворены путем объединения трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
Кривая скорость-момент отображает ожидаемую мощность двигателя Производительность двигателя представлена на графике кривой скорости-крутящего момента. Асинхронный двигатель переменного тока запустится с нулевой скорости при крутящем моменте «Ts», затем постепенно увеличит свою скорость за пределами нестабильной области и установится на «P» в стабильной области, где нагрузка и крутящий момент уравновешены. Любые изменения его нагрузки приведут к смещению положения «P» по кривой, и двигатель остановится, если он будет работать в нестабильной области. |
 Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Реверсивные двигатели
Реверсивные двигатели по определению могут работать в обратном направлении и идеально подходят для операций пуска/останова. Реверсивный двигатель похож на асинхронный двигатель, но с фрикционным тормозом и более сбалансированными обмотками. Благодаря фрикционному тормозному механизму его обгон уменьшается примерно до 6 оборотов после отключения питания (до включения передачи). Обмотка двигателя также более сбалансирована, чтобы увеличить пусковой момент для работы в режиме пуска/останова.
Из-за дополнительного тепла, выделяемого реверсивными двигателями, их рекомендуемый рабочий цикл составляет всего 30 минут или 50 %. Примером применения реверсивного двигателя является делительный конвейер, который не слишком требователен к пропускной способности или точности остановки.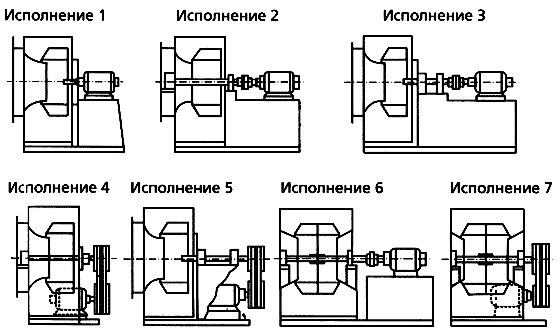
В задней части реверсивного двигателя установлен фрикционный тормозной механизм. Спиральная пружина оказывает постоянное давление, чтобы позволить тормозной колодке скользить к тормозному диску. Тормозное усилие, создаваемое тормозным механизмом реверсивного двигателя Oriental Motor, составляет примерно 10% выходного крутящего момента двигателя. | |
| На графике показана разница между кривыми скорость-момент асинхронного двигателя и реверсивного двигателя. |
Двигатели с электромагнитным тормозом
Двигатели с электромагнитным тормозом сочетают в себе трехфазный асинхронный двигатель или однофазный реверсивный двигатель со встроенным электромагнитным тормозом, активируемым при отключении питания. По сравнению с реверсивными двигателями, эти двигатели обеспечивают перебег всего 2-3 оборота (до передачи) и могут использоваться до 50 раз в минуту. Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Тормозной механизм внутри двигателя с электромагнитным тормозом более совершенен, чем реверсивный двигатель. Вместо тормозной колодки и винтовой пружины, которая постоянно оказывает давление, электромагнитный тормоз включается и выключается электромагнитным и пружинным механизмом.
Как они работают
Как показано на изображении выше, когда на катушку магнита подается напряжение, якорь притягивается к электромагниту против силы пружины, тем самым отпуская тормоз и позволяя валу двигателя свободно вращаться. Когда напряжение не подается, пружина прижимает якорь к тормозной ступице и удерживает вал двигателя на месте, тем самым приводя в действие тормоз.
Двигатели с электромагнитным тормозом используются в вертикальных приложениях, где необходимо удерживать груз, или в приложениях, где груз должен быть заблокирован в положении при отключении питания.
Моментные двигатели
Моментные двигатели предназначены для обеспечения высокого пускового крутящего момента и характеристик наклона (крутящий момент максимален при нулевой скорости и постоянно уменьшается с увеличением скорости), а также для работы в широком диапазоне скоростей. Благодаря своей способности изменять выходной крутящий момент в зависимости от входного напряжения, они обеспечивают стабильную работу при заблокированном роторе или в условиях остановки, например, при намотке/натяжении.
Простая регулировка крутящего момента для натяжения |
Синхронные двигатели
Синхронные двигатели называются «синхронными», поскольку они используют специальный ротор для синхронизации своей скорости с частотой входной мощности. Для 4-полюсного синхронного двигателя, работающего на частоте 60 Гц, он будет вращаться со скоростью 1800 об/мин («синхронная скорость»). Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Другой тип синхронного двигателя, называемый низкоскоростным синхронным двигателем, обеспечивает высокоточное регулирование скорости, низкоскоростное вращение и быстрое двунаправленное вращение. В этих двигателях в роторе используются постоянные магниты, поэтому они очень отзывчивы. Однако они увеличивают количество полюсов, поэтому синхронная скорость снижается до 72 об/мин при 60 Гц. Низкоскоростные синхронные двигатели могут останавливаться в течение 0,025 секунды при частоте 60 Гц, если они работают в пределах допустимой инерции нагрузки.
Базовая конструкция низкоскоростных синхронных двигателей такая же, как у шаговых двигателей. Поскольку они могут работать от источника переменного тока и обеспечивают превосходные характеристики пуска и остановки, их иногда называют «шаговыми двигателями переменного тока».
| Двигатели постоянного тока |
Двигатели постоянного тока используют постоянный ток для питания угольных щеток и коллектора или для электрической коммутации обмоток с драйвером. Двигатели постоянного тока примерно на 30% эффективнее двигателей переменного тока, поскольку им не нужно индуцировать ток для создания магнитных полей. Вместо этого в роторе используются постоянные магниты.
Электродвигатели постоянного тока бывают двух основных типов: щеточные и бесщеточные. В то время как щеточные двигатели предназначены для приложений общего назначения, бесщеточные двигатели предназначены для точных приложений.
Различные типы двигателей постоянного тока
|
Коллекторные двигатели
Источник: Linear Motion Tips/Design World
Щетки и коллектор внутри щеточного двигателя механически коммутируют обмотки двигателя, и он продолжает вращаться до тех пор, пока к нему подключен источник питания. Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели предлагаются нескольких типов: щеточные двигатели с постоянными магнитами, шунтирующие, последовательные и составные. Типичное применение щеточного двигателя включает радиоуправляемые автомобили и дворники.
Поскольку Oriental Motor не производит щеточные двигатели, мы предлагаем ограниченную информацию о щеточных двигателях.
Бесщеточные двигатели
Системы бесщеточных двигателей обеспечивают лучшую производительность, чем щеточные двигатели, благодаря электрической коммутации и замкнутой обратной связи, но требуют, чтобы драйверы электрически коммутировали обмотки двигателя. Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Как они работают
Бесщеточный двигатель имеет встроенный магнитный элемент или оптический энкодер для определения положения ротора. Датчики положения посылают сигналы в схему привода. В бесщеточном двигателе используются трехфазные обмотки
, соединенные по схеме «звезда». В роторе используется радиально-сегментированный постоянный магнит.
ИС на эффекте Холла используется для магнитного элемента датчика. Внутри статора размещены три микросхемы на эффекте Холла, которые посылают цифровые сигналы при вращении двигателя. Эти сигналы сообщают водителю, с какой скоростью работает двигатель и когда нужно подать питание на следующий набор обмоток точно в нужное время.
Узнайте больше о различиях между щеточными и бесщеточными двигателями
Бесщеточные двигатели и приводные системы часто сравнивают с двигателями переменного тока и системами с частотно-регулируемым приводом. Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Мы также показываем кривую скорости и крутящего момента системы бесщеточного двигателя по сравнению с двигателем переменного тока и системой ЧРП с эквивалентным размером корпуса.
| Бесколлекторный двигатель + драйвер | Двигатель переменного тока + ЧРП |
По сравнению с щеточными двигателями и двигателями переменного тока бесщеточные двигатели имеют ряд преимуществ, которые могут улучшить работу или уменьшить размеры для таких приложений, как конвейеры и мобильные роботы.
Бесколлекторные двигатели Oriental Motor комплектуются собственными драйверами для обеспечения гарантированных технических характеристик и быстрой настройки. Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Преимущество бесщеточного двигателя (по сравнению с двигателями переменного тока)
| Преимущества по сравнению с щеточными двигателями | Преимуществапо сравнению с двигателями переменного тока |
|
|
Шаговые двигатели
С технической точки зрения бесщеточные двигатели также включают шаговые двигатели и серводвигатели, которые предназначены для приложений позиционирования благодаря их превосходной способности останавливаться в точных местах. Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
| Зубчатый ротор и статор с постоянным магнитом | Двухфазный метод возбуждения (упрощенная схема) |
Точность остановки шагового двигателя обеспечивается зубчатым намагниченным ротором и зубчатым электромагнитным статором. Другими словами, вместо 4 полюсов в приведенном выше примере бесщеточного двигателя стандартный шаговый двигатель 1,8° имеет 50 полюсов с 50 зубьями.
Благодаря конструкции ротора и статора шаговый двигатель перемещается на четверть шага зуба за каждый прямоугольный импульс, получаемый его драйвером, а скорость регулируется входной частотой импульсов, поэтому очень легко контролировать пройденное расстояние и скорость. с помощью шагового двигателя. Шаговый двигатель также создает удерживающий момент в состоянии покоя, что важно для поддержания точности позиционирования.
Шаговых двигателей с разомкнутым контуром может быть достаточно для обычных приложений с повторяющимся позиционированием. Тем не менее, шаговые двигатели с обратной связью доступны для расширенных приложений позиционирования, требующих как точности, так и проверки положения.
Характеристики скорости и крутящего момента шагового двигателя | Кривая крутящего момента шагового двигателя обычно имеет нисходящий наклон; с самым высоким крутящим моментом, возникающим на низкой скорости, что означает, что его можно использовать для ускорения и замедления. В отличие от системы бесщеточного двигателя, шаговый двигатель не имеет области с ограниченным режимом работы. |
Если вы хотите узнать больше, я написал отдельные заметки о шаговых двигателях.
Узнайте о различиях между гибридными шаговыми двигателями, двигателями с постоянными магнитами и VR
Узнайте больше о различиях между серводвигателями и шаговыми двигателями
| Совет по выбору двигателя: практическое правило (все двигатели1) |
|
Этот пост в блоге дает общее представление о многих типах двигателей переменного/постоянного тока, представленных на рынке. В дополнение к различиям в производительности решающими факторами также могут быть качество, стоимость, ассортимент продукции, время выполнения заказа и поддержка. Очень важно найти поставщика двигателей, который может гарантировать качество работы, предоставлять экспертную поддержку для широкого спектра продуктов и поставлять его в разумно короткие сроки.
Готовы к небольшой практике? Какой тип двигателя вы бы использовали для этих приложений?
Нажмите на GIF-файлы приложений ниже, чтобы увидеть рекомендуемые двигатели для этих приложений.
| Конвейер промывки | Стол XYZ |
Слишком много продуктов на выбор? Свяжитесь с нашей командой!
Темы: конвейер, двигатели переменного тока, Шаговые двигатели, Контроль скорости, Размер двигателя, BLDC двигатели, Смывать, Серводвигатели, Основы управления движением
Классификация электродвигателей ~ Электрические ноу-хау
В предыдущей теме” Электрика
Основные компоненты двигателей « , я объяснил конструкцию и основные компоненты основных типов двигателей; Двигатели переменного и постоянного тока.
Сегодня я объясню различные типы электродвигателей в мире следующим образом.
Основные типы двигателей
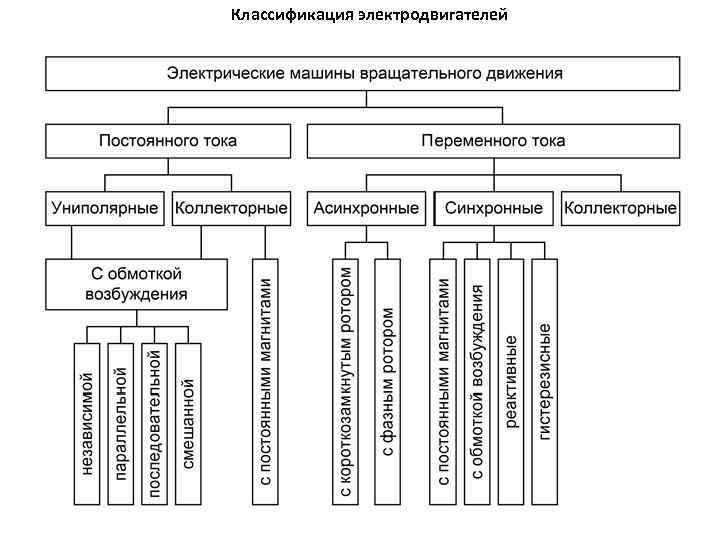
Электрические двигатели можно разделить на две категории следующим образом:
- Двигатели переменного тока.
- Двигатели постоянного тока.
Внутри этих двух основных категорий есть подразделения, как показано на изображении ниже.
Типы двигателей
Примечания: В последнее время, с развитием экономичных и надежных силовых электронных компонентов, появилось множество способов проектирования двигателя, и классификации этих двигателей стали менее строгими, и появилось много других типов двигателей. Наша классификация двигателей будет максимально полной.
Первый: двигатели постоянного тока
| двигатели постоянного тока |
Системы питания постоянного тока не очень распространены в современной инженерной практике. Тем не менее, двигатели постоянного тока уже много лет используются в промышленности. В сочетании с приводом постоянного тока двигатели постоянного тока обеспечивают очень точное управление. Двигатели постоянного тока могут использоваться с конвейерами, подъемниками, экструдерами, судовыми установками, погрузочно-разгрузочными работами, бумагой, пластиком, резиной, сталью, и текстильные приложения, автомобили, самолеты и портативная электроника, в приложениях управления скоростью.
Тем не менее, двигатели постоянного тока уже много лет используются в промышленности. В сочетании с приводом постоянного тока двигатели постоянного тока обеспечивают очень точное управление. Двигатели постоянного тока могут использоваться с конвейерами, подъемниками, экструдерами, судовыми установками, погрузочно-разгрузочными работами, бумагой, пластиком, резиной, сталью, и текстильные приложения, автомобили, самолеты и портативная электроника, в приложениях управления скоростью.
Преимущества двигателей постоянного тока:
- Их скорость легко регулировать в широком диапазоне; исторически сложилось, что их характеристика крутящий момент-скорость настраивается легче, чем у всех категорий двигателей переменного тока. Вот почему большинство тяговых и серводвигателей были машинами постоянного тока. Например, двигатели для привода рельсовых транспортных средств до недавнего времени были исключительно машинами постоянного тока.
- Их уменьшенные габаритные размеры позволяют значительно сэкономить пространство, что позволяет производителям машин или установок не зависеть от преувеличенных размеров циркулярных двигателей.

Недостатки двигателей постоянного тока
- Так как им нужны щетки для соединения обмотки ротора. Происходит износ щеток, и он резко возрастает в условиях низкого давления. Поэтому их нельзя использовать в искусственных сердцах. При использовании в самолете щетки потребуют замены через один час работы.
- Искры от щеток могут привести к взрыву, если окружающая среда содержит взрывоопасные материалы.
- Радиочастотный шум от щеток может мешать работе находящихся рядом телевизоров, электронных устройств и т. д. Двигатели постоянного тока
- также дороже двигателей переменного тока.
Таким образом, во всех применениях двигателей постоянного тока используется механический переключатель или коммутатор для преобразования тока на клеммах, который является постоянным или постоянным, в переменный ток в якоре машины. Поэтому машины постоянного тока также называют коммутационными машинами.
Типы двигателей постоянного тока:
| Типы двигателей постоянного тока |
Двигатели постоянного тока в основном делятся на:
- Щеточные двигатели постоянного тока (BDC).
- Бесщеточные двигатели постоянного тока (BLDC).
1. A Щеточные двигатели постоянного тока
| Щеточные двигатели постоянного тока |
Коллекторный двигатель постоянного тока (BDC) представляет собой электродвигатель с внутренней коммутацией, предназначенный для работы от источника питания постоянного тока.
Области применения:
Коллекторные двигатели постоянного тока широко используются в самых разных областях: от игрушек до автомобильных сидений, регулируемых с помощью кнопки.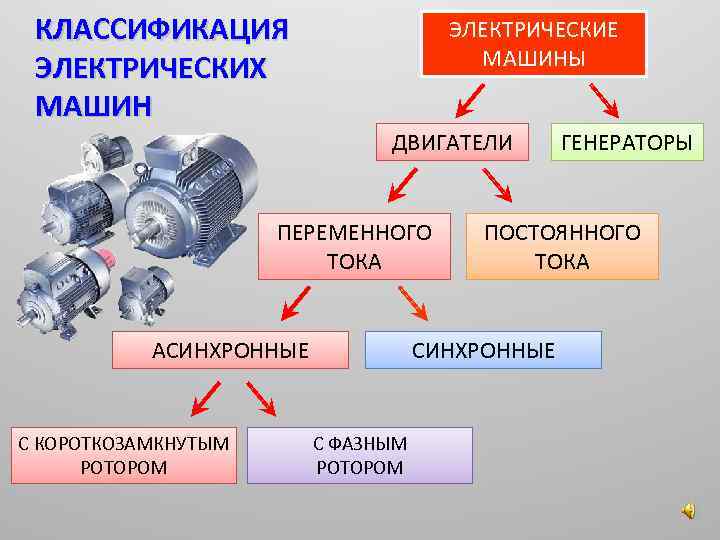
Advantages:
Brushed DC (BDC) motors are inexpensive, easy to drive, and are readily available in all sizes and shapes
Construction :
| Brushed Двигатель постоянного тока Конструкция |
Все двигатели BDC состоят из одних и тех же основных компонентов: статора, ротора, щеток и коллектора.
1- Статор
Статор создает стационарное магнитное поле, окружающее ротор. Это поле создается либо постоянными магнитами, либо электромагнитными обмотками.
2- Ротор
| Ротор (якорь) |
 Магнитные полюса этого поля ротора будут притягиваться к противоположным полюсам, генерируемым статором, заставляя ротор вращаться. Когда двигатель вращается, обмотки постоянно находятся под напряжением в разной последовательности, так что магнитные полюса, генерируемые ротором, не пересекают полюса, генерируемые в статоре. Это переключение поля в обмотках ротора называется коммутацией.
Магнитные полюса этого поля ротора будут притягиваться к противоположным полюсам, генерируемым статором, заставляя ротор вращаться. Когда двигатель вращается, обмотки постоянно находятся под напряжением в разной последовательности, так что магнитные полюса, генерируемые ротором, не пересекают полюса, генерируемые в статоре. Это переключение поля в обмотках ротора называется коммутацией.3- Brushes and Commutator
|
Сегменты и щетки
В отличие от других типов электродвигателей (т. е. бесщеточных двигателей постоянного тока, асинхронных двигателей переменного тока), для двигателей BDC не требуется контроллер для переключения тока в обмотках двигателя. Вместо этого коммутация обмоток двигателя BDC выполняется механически. Сегментированная медная втулка, называемая коммутатором, находится на оси двигателя BDC. Когда двигатель вращается, угольные щетки (движущиеся сбоку от коммутатора для подачи напряжения питания на двигатель) скользят по коммутатору, соприкасаясь с различными сегментами коммутатора. Сегменты прикреплены к разным обмоткам ротора, поэтому внутри двигателя создается динамическое магнитное поле при подаче напряжения на щетки двигателя. Важно отметить, что щетки и коллектор являются частями двигателя BDC, которые наиболее подвержены износу, поскольку они скользят относительно друг друга.
е. бесщеточных двигателей постоянного тока, асинхронных двигателей переменного тока), для двигателей BDC не требуется контроллер для переключения тока в обмотках двигателя. Вместо этого коммутация обмоток двигателя BDC выполняется механически. Сегментированная медная втулка, называемая коммутатором, находится на оси двигателя BDC. Когда двигатель вращается, угольные щетки (движущиеся сбоку от коммутатора для подачи напряжения питания на двигатель) скользят по коммутатору, соприкасаясь с различными сегментами коммутатора. Сегменты прикреплены к разным обмоткам ротора, поэтому внутри двигателя создается динамическое магнитное поле при подаче напряжения на щетки двигателя. Важно отметить, что щетки и коллектор являются частями двигателя BDC, которые наиболее подвержены износу, поскольку они скользят относительно друг друга.
Как работает коммутатор:
Как работает коммутатор |
Когда ротор вращается, клеммы коммутатора также поворачиваются и постоянно меняют полярность тока, который он получает от неподвижных щеток, прикрепленных к батарее.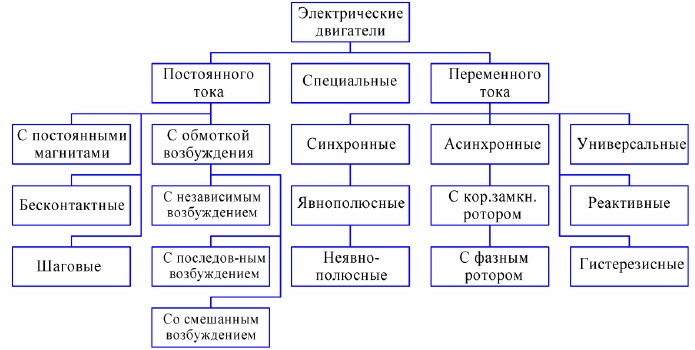
Типы двигателей BDC:
| Типы двигателей постоянного тока |
Различные типы двигателей BDC отличаются конструкцией статора или способом подключения электромагнитных обмоток к источнику питания. Эти типы:
- Постоянный магнит.
- Шунтовая рана.
- Серия-рана.
- Составная рана.
- Двигатель постоянного тока с независимым возбуждением.
- Универсальный двигатель.
- Серводвигатели.
A- Permanent Magnet
| Permanent Magnet Motor |
A permanent magnet DC (PMDC) motor is a motor whose полюса сделаны из постоянных магнитов для создания поля статора.
Преимущества:
- Поскольку внешняя цепь возбуждения не требуется, отсутствуют потери в меди цепи возбуждения.
- Поскольку обмотки возбуждения не требуются, эти двигатели могут быть значительно меньше.
- Широко используется в приложениях с низким энергопотреблением.
- Обмотка возбуждения заменена на постоянный магнит (простая конструкция и меньше места).
- Нет требований к внешнему возбуждению.
Недостатки:
- Поскольку постоянные магниты создают меньшую плотность магнитного потока, чем шунтирующие поля с внешней поддержкой, такие двигатели имеют меньший индуктивный крутящий момент.
- Всегда существует риск размагничивания из-за сильного нагрева или реакции якоря (некоторые двигатели PMDC имеют встроенные обмотки, чтобы предотвратить это).
B- Шунт-вамп
| Shunt Shunt Motor |
Shunt-Wound Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound-Wound арматура.
Скорость практически постоянна и не зависит от нагрузки, поэтому подходит для коммерческих применений с низкой пусковой нагрузкой, таких как центробежные насосы, станки, воздуходувки, поршневые насосы и т. д.
Преимущества:
- Ток в катушке возбуждения и якоре не зависят друг от друга. в результате эти двигатели имеют отличный контроль скорости.
- Потеря магнетизма не является проблемой для двигателей SHWDC, поэтому они, как правило, более надежны, чем двигатели PMDC.
- Скоростью можно управлять, включив сопротивление последовательно с якорем (уменьшение скорости) или вставив сопротивление в ток возбуждения (увеличив скорость).
Недостатки:
- Коллекторные двигатели постоянного тока с параллельной обмоткой (SHWDC) имеют недостатки при реверсивном применении, поскольку направление обмотки относительно параллельной обмотки должно быть изменено на противоположное при изменении напряжения якоря. Здесь необходимо использовать реверсивные контакторы.
 Здесь необходимо использовать реверсивные контакторы.
Здесь необходимо использовать реверсивные контакторы.Двигатель серии C
| Двигатель серии C |
Коллекторные двигатели постоянного тока с последовательной обмоткой (SWDC) имеют катушку возбуждения, включенную последовательно с якорем. Эти двигатели идеально подходят для приложений с высоким крутящим моментом, таких как тяговые транспортные средства (краны и подъемники, электропоезда, конвейеры, лифты, электромобили), поскольку ток как в статоре, так и в якоре увеличивается под нагрузкой.
Преимущества:
- Крутящий момент пропорционален I2, поэтому он обеспечивает самое высокое отношение крутящего момента к току по сравнению со всеми другими двигателями постоянного тока.
Недостатки:
- Недостатком двигателей SWDC является то, что они не имеют точного контроля скорости, как двигатели PMDC и SHWDC.
- Скорость ограничена 5000 об/мин.
- Следует избегать запуска последовательного двигателя без нагрузки, так как двигатель будет неконтролируемо ускоряться.

D- Двигатель с компаундной обмоткой
| Двигатель с компаундной обмоткой |
Двигатели с комбинированной обмоткой (CWDC) представляют собой комбинацию двигателей с параллельной и последовательной обмоткой.
В двигателях CWDC используется как последовательное, так и шунтирующее поле. Производительность двигателя CWDC представляет собой комбинацию двигателей SWDC и SHWDC. Двигатели CWDC имеют более высокий крутящий момент, чем двигатели SHWDC, и обеспечивают лучшее управление скоростью, чем двигатели SWDC.
Используется в таких областях, как прокатные станы, внезапные временные нагрузки, тяжелые станки, штампы и т. д.
д.
Преимущества:
- Этот двигатель имеет хороший пусковой момент и стабильную скорость.
Недостатки:
- Скорость холостого хода регулируется, в отличие от серийных двигателей.
E- Separately excited DC motor
| Separately excited DC motor |
In a separately excited DC motor the field coils are supplied from an independent source, such as двигатель-генератор, и на ток возбуждения не влияют изменения тока якоря. Двигатель постоянного тока с независимым возбуждением иногда использовался в тяговых двигателях постоянного тока для облегчения контроля проскальзывания колес.
F- Universal Motor
| Universal Motor |
. источник. Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель предназначен для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемный подъемник.
источник. Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель предназначен для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемный подъемник.
G- сервоприводы
| Servo Motors |
Servo Motors. в указанное положение. Серводвигатели предназначены для приложений, включающих управление положением, регулирование скорости и управление крутящим моментом.
|
Серводвигатель в основном состоит из двигателя постоянного тока, редуктора, датчика положения, который в основном представляет собой потенциометр, и управляющей электроники.