
Классификация электродвигателей
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на вентильные (бесколлекторные) и коллекторные. Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор. Смотрите по этой теме: Современные синхронные реактивные двигатели
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
ЭлектроВести (elektrovesti.net) — новости мировой энергетики и возобновляемой энергетики Украины
Виды и типы электродвигателей – постоянного и переменного тока, синхронные и асинхронные
Электрические машины (электродвигатели), преобразовывающие электроэнергию в механическую имеют широкую сферу применения и повсеместно используются в быту и на производстве.
Несмотря на типовое конструктивное исполнение (наличие неподвижного статора или индуктора и вращающегося ротора или якоря) и принцип действия эти устройства разделяются на виды имеющими свои особенности:
- тип и значение напряжения питания;
- характер синхронизации рабочего поля с частотой вращения ротора.


С преимуществами и недостатками каждого вида стоит ознакомиться заранее.
КЛАССИФИКАЦИЯ И ВИДЫ ЭЛЕКТРОДВИГАТЕЛЕЙ
Одним из основных параметров классификации является тип напряжения питания:
- постоянное;
- переменное.
Двигатели постоянного тока, подключаются к аккумуляторам, солнечным батареям или блокам питания. Данная группа представлена двигателями с возможностью самосинхронизации, повышенной перегрузочной способностью и равномерностью вращения.
Из-за потребности в источнике постоянного напряжения их применение ограничено, но именно этот вид двигателей используется при необходимости точной и быстрой регулировки электроприводов с высокой мощностью.
Двигатели переменного тока являются более универсальными и имеют широкую сферу применения. Этот тип электродвигателей имеет простую конструкцию со статором из ферромагнитных пластин и устанавливается практически везде – от бытовых приборов до приводов тяжелого оборудования.
Похожее исполнение и принцип действия с электродвигателями постоянного тока имеют двигатели пульсирующего тока и универсальные устройства, работающие на обоих видах питания.
Первые устанавливаются на электровозах и подключаются через соответствующие выпрямители. Вторые применяются при необходимости получения частоты вращения свыше стандартных 3000 об/мин и чаще всего устанавливаются в бытовой технике, работающей и от аккумуляторов, и от обычной сети.
В зависимости от конструкции электродвигатели постоянного тока разделяются на коллекторные, оснащенные щеточно-коллекторным узлом, и бесколлекторные (они же – вентильные). Первые в свою очередь разделяются на виды с самовозбуждением (параллельным, последовательным или смешанным) или с независимым возбуждением обмотки.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
В зависимости от принципа действия и характера взаимодействия с электромагнитным полем полем двигатели переменного тока разделяются на:
- синхронные;
- асинхронные.

У первых угловая скорость магнитного поля статора всегда совпадает или движется дискретно частоте вращения ротора.
Устройство таких двигателей таких типов бывает разным: мощные виды синхронных двигателей практически всегда имеют на якоре обмотку возбуждения, устройства с малой и средней мощностью оснащаются постоянным магнитами.
Также в группу синхронных входят модели с питанием обмотки от полупроводниковых элементов (вентильные реактивные электродвигатели) и устройства с шаговым угловым перемещением ротора.
Асинхронные электрические машины имеют самую широкую сферу применения и наиболее распространены в быту и производстве.
Данная группа представлена электродвигателями с разным числом фаз на обмотке (одно-, двух-, трех- и многофазные) и исполнением ротора (фазным и короткозамкнутым). Конструкция статора при этом практически едина, разница проявляется только в вариантах исполнения обмотки.
Помимо основных параметров (типа напряжения питания, синхронизации э/м поля с частотой вращения и исполнением статора и ротора) все электродвигатели условно разделяются на:
1. Модели с разной категорией и климатическим исполнением. Основным ориентиром при выборе конкретного типа служит советский, но все еще действующий ГОСТ 15150-69.
Модели с разной категорией и климатическим исполнением. Основным ориентиром при выборе конкретного типа служит советский, но все еще действующий ГОСТ 15150-69.
2. Виды с разной степенью пыле- и влагозащиты корпуса – от IP21 до IP68.
3. Двигатели для повторно-кратковременного запуска или продолжительного применения в рабочем режиме. Примером первых служат системы электропривода кранов, лебедок или шиберов, вторых – э/д насосов, вентиляторов или другого непрерывно работающего оборудования.
4. Устройства с малой, средней и большой мощностью.
ДОСТОИНСТВА И НЕДОСТАТКИ РАЗЛИЧНЫХ ТИПОВ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
Постоянного тока.
Рабочие характеристики электродвигателей этого вида во многом зависят от типа подключения обмотки возбуждения.
При последовательном возбуждении достигается максимально высокий момент на валу, но увеличиваются риски ухода системы «в разнос», при параллельном – при меньшем моменте более стабильны обороты, при смешанном – возникает возможность регулировки обеих параметров.
Лучшие показатели в плане точности регулировки пускового момента и скорости имеют двигатели с независимым возбуждением, имеющие возможности регулировки параметров вне зависимости от нагрузки на валу.
Свою роль играет и конструктивное исполнение. Виды с коллекторно-щеточным узлом имеют доступную стоимость и простую регулировку, но склонны к относительно быстрому износу и перегреву. Вентильные бесконтактные электродвигатели характеризуются повышенным КПД и долгим сроком службы, но стоят дороже.
К общим преимуществам постоянников относят:
- возможность и несложную реализацию регулировки частоты вращения;
- сравнительную простоту исполнения;
- отличные пусковые свойства;
- возможность эксплуатации в режиме электродвигателя и генератора;
- компактные габариты.
Минусы проявляются в ограничении применения по типу питания, высокой себестоимости, сложности в эксплуатации и повышенном износе у коллекторных разновидностей. Щетки в узле при необходимости меняются, но это требует дополнительных средств и времени.
Щетки в узле при необходимости меняются, но это требует дополнительных средств и времени.
Несмотря на недостатки, применение этого типа электродвигателей признано оптимальным при оснащении подъемного, бурового и ряда производственного оборудования. Именно ими оснащают привода эскалаторов, электротранспорта, типографских станков и работающего от батарей ручного электро инструмента.
Синхронные электродвигатели переменного тока.
Преимущества этого вида проявляются в стабильности частоты в пределах заданной нагрузки, сопротивляемости перегрузкам, эргономичности и минимальной чувствительности к перепадам напряжения. При необходимости они могут использоваться в качестве генераторов.
Минусы определяются усложненной конструкцией двигателя, более трудным пуском и проблемами при регулировке скорости. Последний параметр остается стабильным и меняется лишь при изменении частоты тока питания. Применение этих видов считается оправданным при мощности потребления свыше 100 Вт, в остальных случаях они замещаются асинхронными видами.
Максимальный эффект достигается при их вводе в системы привода компрессоров, насосных станций, крупногабаритных вентиляторов и аналогичного промышленного оборудования.
Асинхронные двигатели.
Показатели машин этого типа напрямую зависят от числа фаз обмотки и ее исполнения. Наиболее востребованный вид – трехфазный асинхронный с короткозамкнутым ротором используется практически везде, от бытовой техники до промышленных станков и машин. Тот же тип со встроенной многофазной обмоткой признан самым совершенным и надежным.
Востребованность асинхронных электродвигателей объясняется простотой производства (и как следствие – более низкой себестоимостью), надежностью и низкими расходами при применении.
Назвать их идеальными нельзя, этот тип имеет небольшой пусковой момент, ограниченный коэффициент мощности, зависимость от перепадов напряжения и слабую регулировки скорости.
Последние два недостатки устраняется вводом в схемы частотного преобразователя, в целом плюсы асинхронных устройств преобладают над минусами.
* * *
© 2014-2022 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер, могут выражать мнение автора и не подлежат использованию в качестве руководящих и нормативных документов.
Типы двигателей постоянного тока — шунтовые, составные и серийные
Двигатели постоянного тока являются основным сервисным предложением Mawdsleys с момента основания компании в 1959 году.
Доступны 3 основных типа двигателей постоянного тока: серийные, шунтовые и составные . Эти термины относятся к типу соединения обмоток возбуждения по отношению к цепи якоря.
В нашем блоге рассматриваются эти три типа двигателей постоянного тока, объясняются их уникальные свойства и области их возможного использования.
Двигатели постоянного тока У двигателей постоянного тока обмотки возбуждения соединены последовательно с якорем. Последовательная обмотка будет иметь относительно небольшое количество витков более крупного провода или медной полосы, которые способны выдерживать полный ток нагрузки двигателя.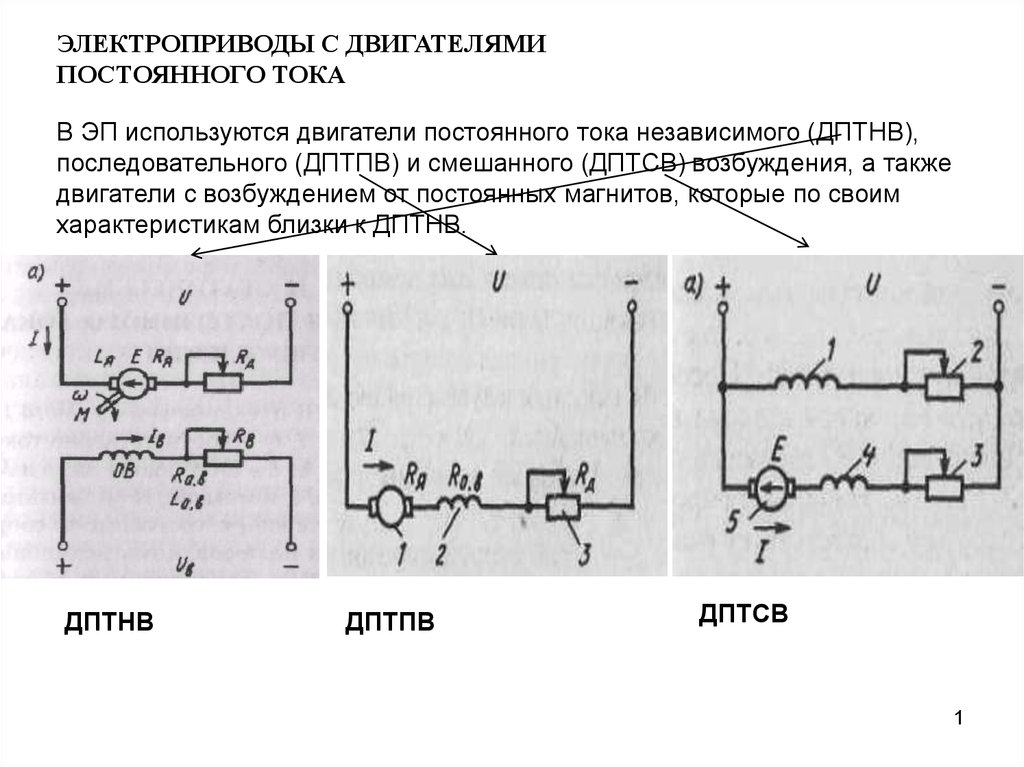 При запуске, поскольку обмотки имеют низкое сопротивление, может потребляться большой ток, создавая высокий пусковой момент.
При запуске, поскольку обмотки имеют низкое сопротивление, может потребляться большой ток, создавая высокий пусковой момент.
Это преимущество для высоких пусковых нагрузок, таких как тяга, кран и другие тяжелые приложения. Скорость последовательного двигателя зависит от нагрузки, поэтому, когда ток полной нагрузки, протекающий через цепь, уменьшается, скорость увеличивается.
В некоторых случаях скорость двигателей потенциально может увеличиться до уровня, превышающего рекомендуемый максимум. По этой причине серийный двигатель не следует соединять с нагрузкой ремнем.
Шунтирующие двигатели постоянного токаВ параллельном двигателе постоянного тока обмотка возбуждения соединена параллельно (шунтирую) с якорем. Шунтирующая обмотка намотана из множества витков тонкого медного провода, и, поскольку она подключена к источнику возбуждения постоянного тока, ее ток возбуждения будет постоянным.
Двигатель разгонится до номинальной скорости, и изменение нагрузки не будет сильно влиять на него. Пусковой крутящий момент будет меньше, чем у серийного двигателя аналогичного размера, но если это не требуется, то для применения может быть предпочтительнее параллельный двигатель с постоянной скоростью.
Пусковой крутящий момент будет меньше, чем у серийного двигателя аналогичного размера, но если это не требуется, то для применения может быть предпочтительнее параллельный двигатель с постоянной скоростью.
Шунтирующие двигатели постоянного тока могут использоваться во многих областях, таких как производство пластмасс или экструзия проволоки. У нас есть запас небольших двигателей постоянного тока с параллельным возбуждением в формате IP23 IC06 (капленепроницаемые, вентилируемые). Другие двигатели постоянного тока могут быть изготовлены по запросу.
Составные двигатели постоянного токаВ составном двигателе постоянного тока большая часть поля намотана для шунтирующего поля, но с несколькими витками последовательной обмотки сверху. Шунт подключается к источнику возбуждения, а последовательные витки подключаются последовательно с якорем. Это обеспечивает двигатель с комбинацией параллельных и последовательных характеристик.
Пусковой момент будет выше, чем у параллельного двигателя, но не так высок, как у последовательного двигателя.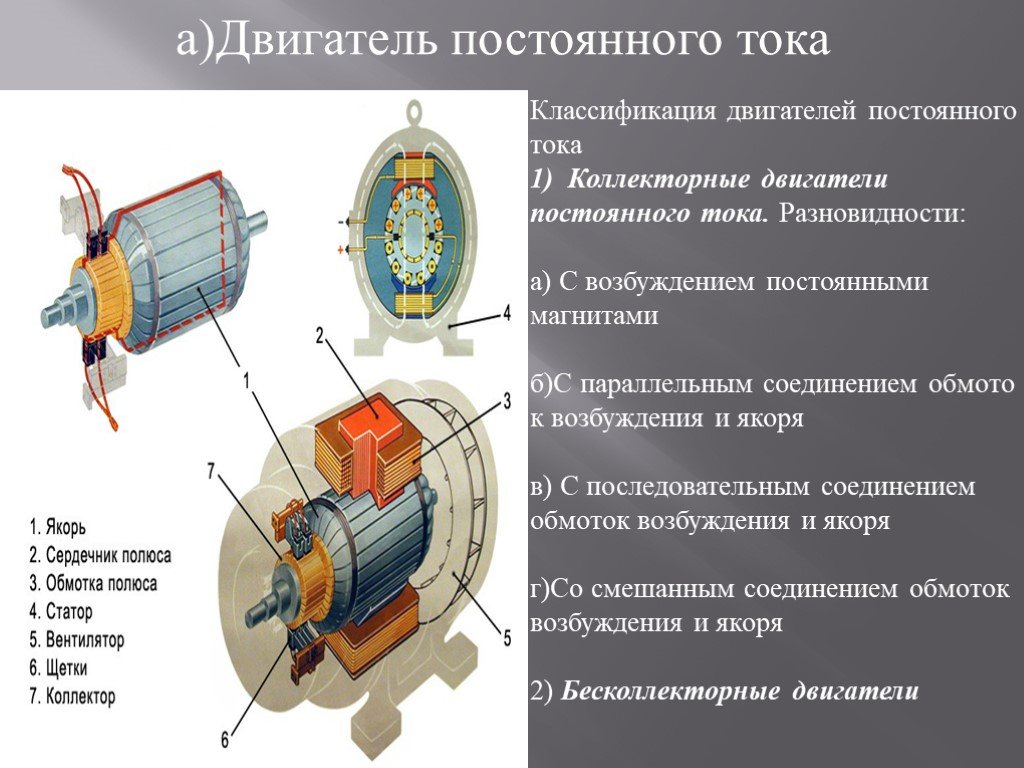 Скорость будет меняться в зависимости от нагрузки, и величина будет зависеть от % площади возбуждения, выделенной для последовательной обмотки. Поле серии может быть настроено либо на увеличение, либо на уменьшение скорости с нагрузкой. Области применения этих двигателей различаются, но часто они предназначены для более крупных устройств, таких как тормозные генераторы, конвейеры, смесители и т. д.
Скорость будет меняться в зависимости от нагрузки, и величина будет зависеть от % площади возбуждения, выделенной для последовательной обмотки. Поле серии может быть настроено либо на увеличение, либо на уменьшение скорости с нагрузкой. Области применения этих двигателей различаются, но часто они предназначены для более крупных устройств, таких как тормозные генераторы, конвейеры, смесители и т. д.
Составной двигатель постоянного тока также можно использовать, если питание осуществляется от батарей с широким диапазоном напряжения. В этом случае и поле, и якорь имеют одинаковое напряжение, и использование составной обмотки помогает поддерживать скорость в приемлемом диапазоне.
Общие неисправности двигателей постоянного токаОтказ двигателя постоянного тока может привести к снижению эффективности и даже полному простою некоторых операций. Некоторые из наиболее распространенных проблем, которые приводят к выходу из строя двигателей постоянного тока, включают:
- Износ угольных щеток
- Угольная пыль
- Износ поверхности коллектора
- Неисправный коммутатор
- Чрезмерный шум и вибрация
- Скачки напряжения
- Ослабленные подшипники или катушки
- Свободная основа
Срок службы двигателя постоянного тока можно продлить, если его регулярно проверять и обслуживать профессионал.
Полное обслуживание двигателей постоянного тока
Независимо от типа двигателя постоянного тока мы можем предложить либо новую сборку, либо полную перемотку и ремонт, все наши перемотки и ремонты выполняются в нашем штате. художественной мастерской, чтобы сократить время выполнения заказов и снизить затраты.
Позвоните нам сейчас, чтобы узнать, как мы можем помочь вам с двигателями постоянного тока, по телефону +44 (0) 117 955 2481 или заполните контактную форму ниже, и мы свяжемся с вами.
Полное имя (обязательно)
Ваш адрес электронной почты (обязательно)
Ваш телефон (обязательно)
Ваше сообщение
Свяжитесь с нами
Полное имя (обязательно)
Ваш адрес электронной почты (обязательно)
Ваш телефон (обязательно)
Ваше сообщение
Типы двигателей постоянного тока — Шунтовые, серийные и двигатели со смешанной обмоткой
A Постоянный ток Moto r, DC назван в соответствии с соединением обмотки возбуждения с якорем. В основном существует два типа двигателей постоянного тока. Один — Двигатель постоянного тока с отдельным возбуждением , а другое — Двигатель постоянного тока с самовозбуждением .
В основном существует два типа двигателей постоянного тока. Один — Двигатель постоянного тока с отдельным возбуждением , а другое — Двигатель постоянного тока с самовозбуждением .
Двигатели с самовозбуждением далее классифицируются как Шунтовая обмотка или параллельный двигатель, Серийная обмотка или серийный двигатель и Комбинированная обмотка или составной двигатель.
Двигатель постоянного тока преобразует электрическую энергию в механическую. Конструкция двигателя постоянного тока и генератора одинакова. Но двигатель постоянного тока имеет широкий диапазон скоростей и хорошую регулировку скорости в электрической тяге.
Принцип работы двигателя постоянного тока основан на том, что проводник с током помещается в магнитное поле и на него действует механическая сила.
Двигатель постоянного тока обычно используется в местах, где требуется защитный кожух, например, влагонепроницаемый, огнестойкий и т. д. в соответствии с требованиями. Подробное описание различных типов двигателей приведено ниже.
д. в соответствии с требованиями. Подробное описание различных типов двигателей приведено ниже.
Состав:
- Двигатель постоянного тока с независимым возбуждением
- Двигатель постоянного тока с самовозбуждением
- Двигатель с параллельным возбуждением Двигатель с обмоткой серии
- Двигатель с комбинированной обмоткой
Двигатель постоянного тока с независимым возбуждением
Как видно из названия, катушки возбуждения или обмотки возбуждения питаются от отдельного источника постоянного тока, как показано на принципиальной схеме, показанной ниже:
Двигатель постоянного тока с независимым возбуждениемДвигатель постоянного тока с самовозбуждением подразумевает самовозбуждение, следовательно, в этом типе двигателя ток в обмотках подается самой машиной или двигателем. Двигатель постоянного тока с самовозбуждением подразделяется на двигатель с параллельной обмоткой и двигатель с последовательной обмоткой.
 Они подробно объясняются ниже.
Они подробно объясняются ниже. Двигатель с параллельным возбуждением
Это наиболее распространенный тип двигателя постоянного тока. Здесь обмотка возбуждения подключена параллельно якорю, как показано на рисунке ниже:
Двигатель постоянного тока с параллельной обмоткойУравнения тока, напряжения и мощности для параллельного двигателя записываются следующим образом.
Применяя KCL на стыке A на рисунке выше.
Сумма входящих токов в А = Сумма исходящих токов в А.
Где,
I — входной линейный ток
Ia — ток якоря
Ish — ток возбуждения шунта
Уравнение (1) — это уравнение тока.
Уравнения напряжения записываются с использованием закона напряжения Кирхгофа (KVL) для цепи обмотки возбуждения.
Для цепи обмотки якоря уравнение будет иметь вид:
Уравнение мощности будет иметь вид:
Потребляемая мощность = развиваемая механическая мощность + потери в якоре + потери в возбуждении.
Умножая уравнение (3) на Ia, получаем следующие уравнения.
Где,
VI a – электрическая мощность, подводимая к якорю двигателя.
Серийный двигатель с обмоткой
В последовательном двигателе обмотка возбуждения соединена последовательно с обмоткой якоря. Схема подключения показана ниже: Двигатель с обмоткой серии
Применяя KCL на рисунке выше:
Где,
I se — последовательный ток возбуждения
Уравнение напряжения можно получить, применив KVL на приведенном выше рисунке.
Уравнение мощности получается умножением уравнения (8) на I получаем
Потребляемая мощность = развиваемая механическая мощность + потери в якоре + потери в поле (10), мы получим уравнение, показанное ниже:
Двигатель с комбинированной обмоткой
Двигатель постоянного тока, имеющий как шунтирующую, так и последовательную обмотку возбуждения, называется составным двигателем .