
Теоретические основы применения асинхронных электрических машин
Теоретические основы применения асинхронных электрических машинТеоретические основы применения асинхронных электрических машин
ТеорияПрактикаFollow @I380Ru | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Мощность таких приводов составляет до 10МВт, иногда можно встретить и более мощные приводы. Эти приводы нашли применение в работе шахтных мельниц.
Вентильный тип устройств дает возможность более простого и вместе с тем осень экономичного решения задач по возврату энергии источнику питания в моменты рекуперативного торможения.
Мощность таких приводов составляет до 10МВт, иногда можно встретить и более мощные приводы. Эти приводы нашли применение в работе шахтных мельниц.
Вентильный тип устройств дает возможность более простого и вместе с тем осень экономичного решения задач по возврату энергии источнику питания в моменты рекуперативного торможения. ..
..
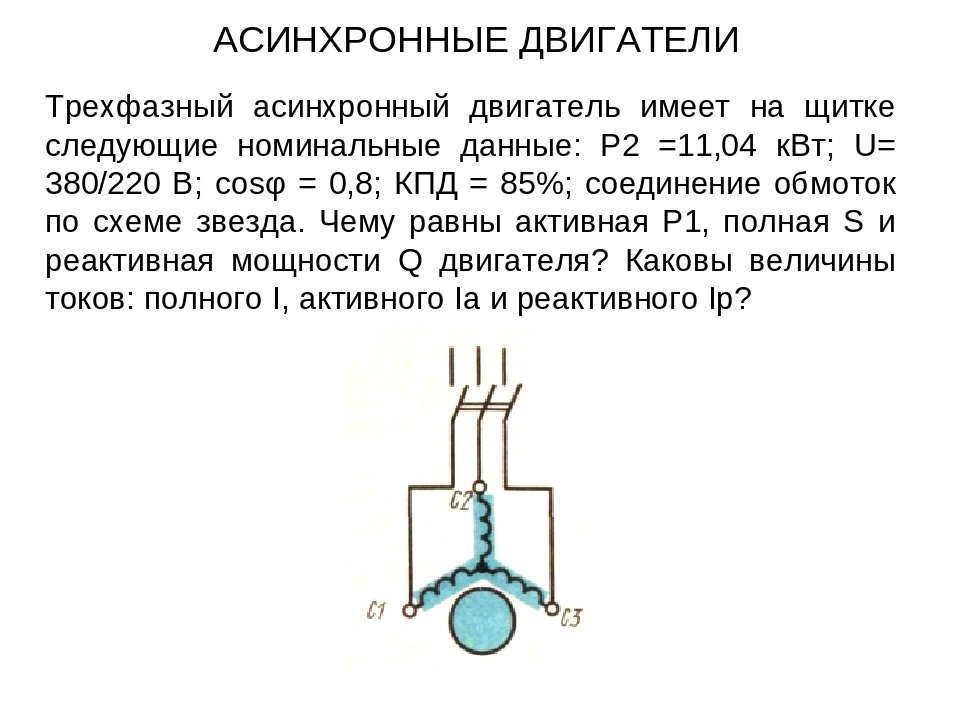
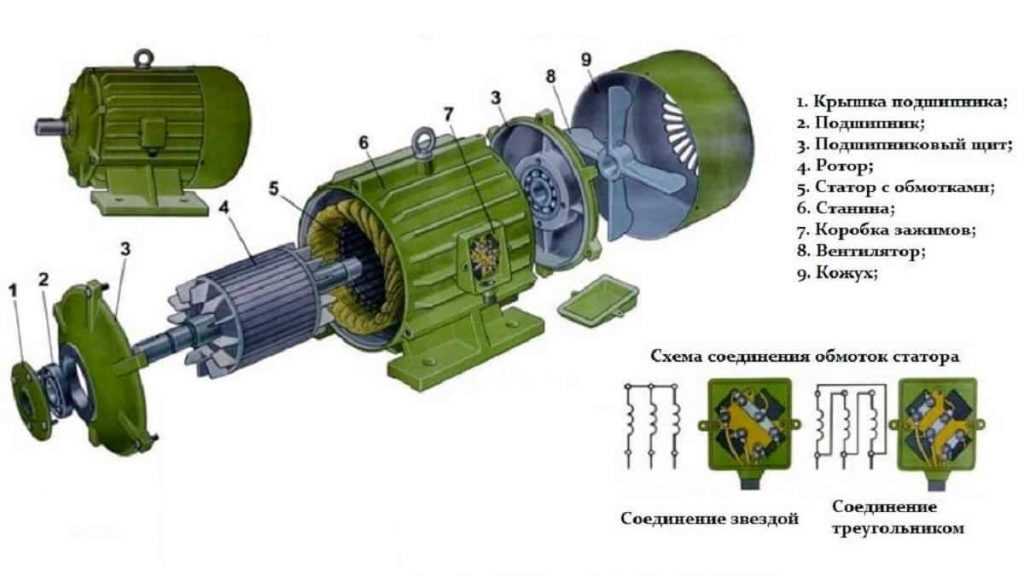
 Переключение со звезды обмотки статора на треугольник, имеет несколько возможностей снижения напряжения U1 во время пуска. Асинхронные двигатели, работающие при соединении треугольника и обмотки статора, обладающие фазным напряжением равным напряжению сети, имеют возможность применения пуска переключения обмотки на треугольник со звезды. В тот момент, когда двигатель подключается к сети, переключатель ставится в положение «звезда», в таком случае звезда оказывается соединенной с обмоткой статора.
Переключение со звезды обмотки статора на треугольник, имеет несколько возможностей снижения напряжения U1 во время пуска. Асинхронные двигатели, работающие при соединении треугольника и обмотки статора, обладающие фазным напряжением равным напряжению сети, имеют возможность применения пуска переключения обмотки на треугольник со звезды. В тот момент, когда двигатель подключается к сети, переключатель ставится в положение «звезда», в таком случае звезда оказывается соединенной с обмоткой статора. После этого замыкается рубильник №2, в результате чего двигатель включается на пониженное напряжение U’1.В этом случае, измеренный на выходе автотрансформатора пусковой ток двигателя, будет уменьшен в Ка раз, где Ка означает коэффициент трансформации автотрансформатора. Если в этом случае, измерить ток на входе автотрансформатора, то можно заметить, что при включении двигателя в сеть, по сравнению с пусковым током, он уменьшается в К2а раза.
После этого замыкается рубильник №2, в результате чего двигатель включается на пониженное напряжение U’1.В этом случае, измеренный на выходе автотрансформатора пусковой ток двигателя, будет уменьшен в Ка раз, где Ка означает коэффициент трансформации автотрансформатора. Если в этом случае, измерить ток на входе автотрансформатора, то можно заметить, что при включении двигателя в сеть, по сравнению с пусковым током, он уменьшается в К2а раза.


Асинхронные двигатели: методы подключения расчет. |
|||||
| |||||
| Асинхронный электродвигатель в качестве генератора | |||||
| |||||
 О. Доливо-Добровольским, получил в настоящее время преимущественное распространение и в промышленности, и в сельском хозяйстве, а также в быту. Асинхронные электродвигатели–самые простые и надёжные в эксплуатации. Поэтому во всех случаях, когда это допустимо по условиям электропривода и нет необходимости в компенсации реактивной мощности, следует применять асинхронные электродвигатели переменного тока.
О. Доливо-Добровольским, получил в настоящее время преимущественное распространение и в промышленности, и в сельском хозяйстве, а также в быту. Асинхронные электродвигатели–самые простые и надёжные в эксплуатации. Поэтому во всех случаях, когда это допустимо по условиям электропривода и нет необходимости в компенсации реактивной мощности, следует применять асинхронные электродвигатели переменного тока.
| Влияние температуры на срок службы изоляции электродвигателей | |||||
| |||||

| Защита электродвигателей. | |||||
| |||||

| Измерение тока, напряжения, сопротивления электродвигателя | |||||
| |||||
 Параллельно ему включается амперметр.
Параллельно ему включается амперметр.
| ОБОЗНАЧЕНИЯ И ТИПЫ ЭЛЕКТРОДВИГАТЕЛЕЙ. | |||||
| |||||
 Электродвигатели 1—5-го габаритов во второй серии выпускают только в закрытом обдуваемом исполнении, что повышает их надежность: срок службы закрытой машины малой мощности увеличивается в 1,5—2 раза по сравнению с защищенной.
Электродвигатели 1—5-го габаритов во второй серии выпускают только в закрытом обдуваемом исполнении, что повышает их надежность: срок службы закрытой машины малой мощности увеличивается в 1,5—2 раза по сравнению с защищенной.
| Однофазные асинхронные электродвигатели | |||||
| |||||
| ПОЛЯРИЗОВАННЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | |||||
| |||||
 Цель изобретения упрощение конструкции (бескорпусное исполнение), улучшение технико-экономических и массогабаритных характеристик.
Цель изобретения упрощение конструкции (бескорпусное исполнение), улучшение технико-экономических и массогабаритных характеристик.
| ПРИМЕРЫ ИЗ ВИБРОДИАГНОСТИКИ. | |||||
| |||||

| Режимы работы асинхронных электродвигателей | |||||
| |||||
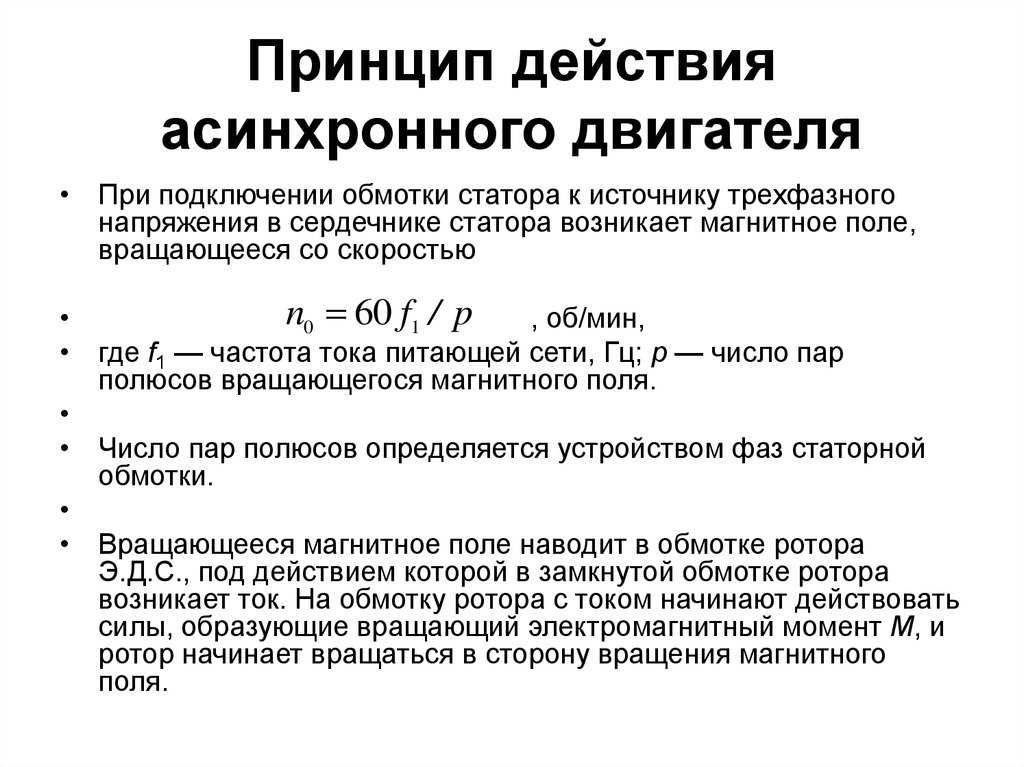
 С исчезновением токов в обмотке ротора прекратится взаимодействие их с магнитным полем и ротор станет вращаться медленнее вращающегося поля. При этом обмотка ротора вновь начнет пересекаться вращающимся полем и на ротор снова будет действовать вращающий момент. Следовательно, ротор при своем вращении всегда должен отставать от скорости вращения магнитного поля статора, т. е. вращаться с меньшей скоростью, почему эти двигатели и получили название асинхронных.
С исчезновением токов в обмотке ротора прекратится взаимодействие их с магнитным полем и ротор станет вращаться медленнее вращающегося поля. При этом обмотка ротора вновь начнет пересекаться вращающимся полем и на ротор снова будет действовать вращающий момент. Следовательно, ротор при своем вращении всегда должен отставать от скорости вращения магнитного поля статора, т. е. вращаться с меньшей скоростью, почему эти двигатели и получили название асинхронных.
| Токовые перегрузки и их влияние на работу и срок службы электродвигателей | |||||
| |||||
 Температура нагрева обмоток электродвигателя зависит от теплотехнических характеристик двигателя и параметров окружающей среды. Часть выделяемого в двигателе тепла идет на нагрев обмоток, а остальное отдается в окружающую среду. На процесс нагрева влияют такие физические параметры, как теплоемкость и теплоотдача.
Температура нагрева обмоток электродвигателя зависит от теплотехнических характеристик двигателя и параметров окружающей среды. Часть выделяемого в двигателе тепла идет на нагрев обмоток, а остальное отдается в окружающую среду. На процесс нагрева влияют такие физические параметры, как теплоемкость и теплоотдача.
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ. | |||||
| |||||

| Ремонт и испытания электрооборудования : новые разработки | |||||
| |||||
 В данной статье описано оборудование для выполнения ремонта электрической части. Большое значение имеет проведение испытаний после ремонта, так как при этом выявляются возможные дефекты. Перечень испытаний электрооборудования регламентирован в «Объемы и нормы испытаний электрооборудования» РД 34.45-51.300-97.
В данной статье описано оборудование для выполнения ремонта электрической части. Большое значение имеет проведение испытаний после ремонта, так как при этом выявляются возможные дефекты. Перечень испытаний электрооборудования регламентирован в «Объемы и нормы испытаний электрооборудования» РД 34.45-51.300-97.
| ИЗОЛЯЦИЯ ВСЫПНЫХ СТАТОРНЫХ ОБМОТОК МАШИН ПЕРЕМЕННОГО ТОКА | |||||
| |||||
 Он имеет большую толщину изоляции, значительно снижающую коэффициент заполнения паза.
Он имеет большую толщину изоляции, значительно снижающую коэффициент заполнения паза.
| » Как делают электродвигатель.(Видео) Как делают электродвигатель.(Видео) » ШИМ-регуляторы оборотов маломощных коллекторных электродвигателей |
Основы двигателей.
 Что такое двигатель, типы двигателей, теория и законы проектирования двигателя
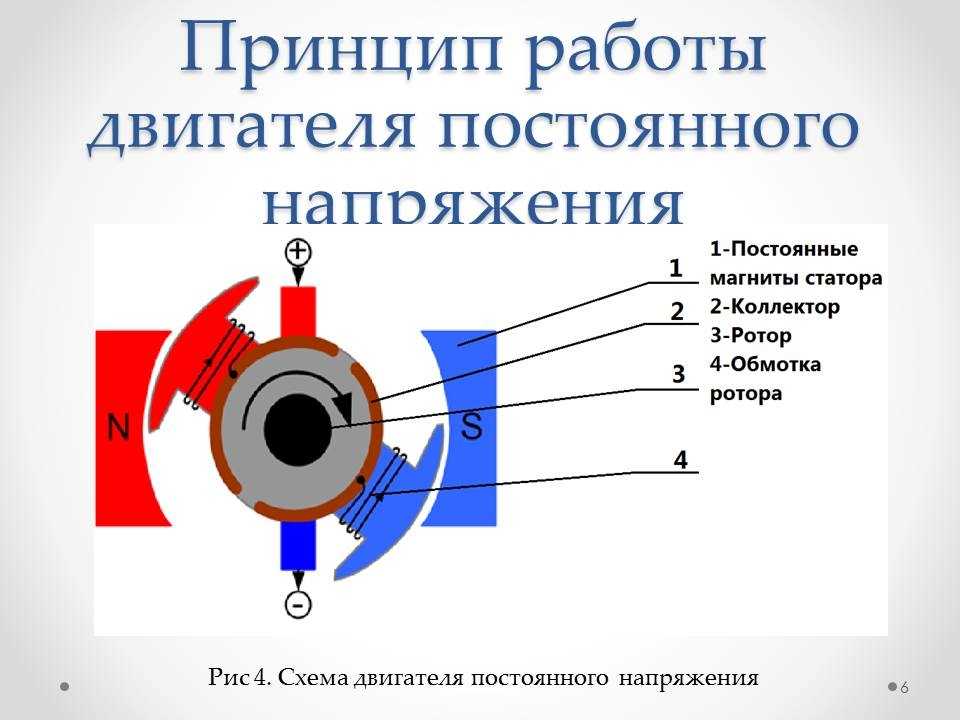
Что такое двигатель, типы двигателей, теория и законы проектирования двигателяВы когда-нибудь задумывались, как вращается двигатель? Какие основные принципы включены? Как это контролируется? Коллекторные двигатели постоянного тока давно присутствуют на рынке, и они легко вращаются только от источника постоянного тока/батареи, в то время как асинхронные двигатели и синхронные двигатели с постоянными магнитами используют сложную электронику и теорию управления для их эффективного вращения. Прежде чем мы доберемся до , что такое двигатель постоянного тока или какие другие типы двигателей , важно понимать работу линейного двигателя — самого основного двигателя . Это поможет нам понять основы вращения двигателя.
Я инженер по силовой электронике и управлению двигателем , и следующий блог будет посвящен управлению двигателем. Но есть определенные темы, которые необходимо понять, прежде чем углубляться в управление двигателем, и мы рассмотрим их в этой статье.
- Работа линейного двигателя
- Типы двигателей и их история
- Заметность
- Взаимодействие потока между статором и ротором
Работа линейного двигателя
Будучи инженером по силовой электронике, я мало что знал о работе двигателей. Я прочитал много заметок, книг и видео по ссылкам. Мне было трудно понять некоторые двигатели и их управление, пока я снова не сослался на основные законы электромеханического преобразования энергии — Законы сил Фарадея и Лоренца . Мы потратим некоторое время на понимание этих законов. Некоторые из вас, возможно, уже знают это, но было бы неплохо пройти через них еще раз. Вы можете узнать что-то новое.
Закон Фарадея
Закон индукции Фарадея устанавливает связь между магнитным потоком витка провода и наведенным в нем напряжением.
e(t) = -dφ/dt …(1)
Где Φ представляет поток в катушке . Это одно из основных уравнений, используемых для построения электрической модели двигателя. В практических двигателях такой ситуации не бывает, поскольку катушка будет состоять из нескольких витков, распределенных в пространстве, и нам придется учитывать поток через каждый из этих витков. Термин потокосцепление (λ) представляет собой общий поток, связанный со всеми катушками, и определяется следующим уравнением:
Это одно из основных уравнений, используемых для построения электрической модели двигателя. В практических двигателях такой ситуации не бывает, поскольку катушка будет состоять из нескольких витков, распределенных в пространстве, и нам придется учитывать поток через каждый из этих витков. Термин потокосцепление (λ) представляет собой общий поток, связанный со всеми катушками, и определяется следующим уравнением:
Φ n представляет собой поток, связанный с n -й катушкой , а N — число витков . Это можно описать как катушку, состоящую из N одиночных витков в последовательной конфигурации. Таким образом,
λ = Nφ e(t) = -dλ/dt = -Ndφ/dt
Знак минус обычно приписывается закону Ленца.
Закон Ленца утверждает следующее : ЭДС (электродвижущая сила) индуцируется в катушке провода, если связанный с ней поток изменяется. Полярность ЭДС такова, что если через него шунтировать резистор, ток, протекающий в нем, противодействует изменению потока, вызывающему эту ЭДС.
Полярность ЭДС такова, что если через него шунтировать резистор, ток, протекающий в нем, противодействует изменению потока, вызывающему эту ЭДС.
Давайте поймем закон Ленца через проводник (стержень), помещенный в магнитное поле (B̅), направленный вниз в плоскость бумаги , как показано на рисунке выше. Сила F , приложенная , перемещает стержень горизонтально, но стержень всегда находится в контакте с горизонтальными проводниками. Внешний резистор R используется как шунт для протекания тока. Итак, схема действует как простая электрическая цепь с источником напряжения (ЭДС индукции) и резистором. Поток, связанный с этой петлей, меняется по мере увеличения площади, связанной с B̅. Это индуцирует ЭДС в цепи в соответствии с законом Фарадея (величина определяется скоростью изменения потока) и законом Ленца (полярность определяется таким образом, чтобы индуцируемый ток противодействовал изменению потока).
Правило большого пальца правой руки поможет нам узнать направление текущего . Если мы согнем пальцы в направлении наведенного тока, то большой палец покажет направление поля, создаваемого этим наведенным током. В этом случае, чтобы противостоять возрастающему потоку из-за поля B̅, нам нужно создать поле вне плоскости бумаги, и, следовательно, ток будет течь против часовой стрелки. В результате клемма A более положительна, чем клемма B. С точки зрения нагрузки положительная ЭДС развивается с увеличением потока, и поэтому мы запишем уравнение как
Если мы согнем пальцы в направлении наведенного тока, то большой палец покажет направление поля, создаваемого этим наведенным током. В этом случае, чтобы противостоять возрастающему потоку из-за поля B̅, нам нужно создать поле вне плоскости бумаги, и, следовательно, ток будет течь против часовой стрелки. В результате клемма A более положительна, чем клемма B. С точки зрения нагрузки положительная ЭДС развивается с увеличением потока, и поэтому мы запишем уравнение как
e(t) = d λ/dt
Обратите внимание, что мы проигнорировали отрицательный знак, когда пишем это уравнение с точки зрения нагрузки. (Похожий случай возникнет, когда мы начнем разбираться с двигателями). Окончательная электрическая схема примет вид, как показано на рисунке ниже. Несмотря на то, что обсуждаемый случай относится к генератору, мы использовали соглашение о знаках с точки зрения двигателя, и полярность, показанная на рисунке ниже, является правильной. (Это станет очевидно, когда мы перейдем к работе двигателя).
Мы можем рассчитать индуцированную ЭДС следующим образом . Катушка из 1 витка (в данном случае проводник) создаст потокосцепление:
Где A — площадь петли, l — длина проводника, v — скорость, с которой движется стержень. двигаться из-за приложенной силы.
Глядя на приведенное выше уравнение, мы можем сказать, что величина ЭДС пропорциональна скорости проводника и не зависит от внешнего резистора . Но внешний резистор будет определять, какая сила необходима для поддержания скорости (и, следовательно, тока). Это обсуждение продолжается в форме закона Лоренца.
Закон Лоренца
Сначала мы проверим уравнение, а затем попробуем его понять.
Ф = д . (E + Vc x B)
Он утверждает, что когда частица с зарядом q движется со скоростью v c в электромагнитном поле, на нее действует сила. В двигателе электрическое поле E не имеет значения. Таким образом,
Таким образом,
Ф = д . Вк. B
Если поле постоянно во времени по длине проводника и перпендикулярно ему, мы можем записать приведенные выше уравнения как:
Ф = д . дх/дт. В = dq/dt. Икс . В = я. л. В = В. я. l
Это показывает, что сила, действующая на заряд, прямо пропорциональна току.
Вернемся к первому рисунку, мы видели, что приложенная внешняя сила индуцирует ЭДС, которая индуцирует ток в резисторе . Вся энергия рассеивается в виде тепла в резисторе. Закон сохранения энергии должен выполняться и отсюда получаем:
Ф . v = е . i
Это уравнение показывает, как механическая энергия преобразуется в электрическую. Такое устройство называется линейным генератором.
Наконец-то мы можем проверить, как работает двигатель, т.е. как электрическая энергия преобразуется в механическую . На рисунке ниже мы заменили внешний резистор резистором с сосредоточенными параметрами цепи, и теперь есть внешний источник напряжения, который подает ток. В этом случае мы будем наблюдать развиваемую силу (F РАЗРАБОТАН ), заданный законом Лоренца. Направление силы можно определить с помощью правила правой руки, показанного ниже. Все двигатели основаны на этих основных принципах. Существует множество подробных статей и видеороликов, описывающих работу щеточных двигателей постоянного тока, бесщеточных двигателей, двигателей СДПМ, асинхронных двигателей и т. д. Поэтому нет смысла делать еще одну статью с описанием работы. Вот ссылка на некоторые из хороших обучающих видео о различных типах двигателей и их работе.
В этом случае мы будем наблюдать развиваемую силу (F РАЗРАБОТАН ), заданный законом Лоренца. Направление силы можно определить с помощью правила правой руки, показанного ниже. Все двигатели основаны на этих основных принципах. Существует множество подробных статей и видеороликов, описывающих работу щеточных двигателей постоянного тока, бесщеточных двигателей, двигателей СДПМ, асинхронных двигателей и т. д. Поэтому нет смысла делать еще одну статью с описанием работы. Вот ссылка на некоторые из хороших обучающих видео о различных типах двигателей и их работе.
История двигателей
- Исторически сложилось так, что широко использовались три типа двигателей: щеточные коллекторные двигатели постоянного тока, синхронные и асинхронные двигатели . Многие приложения требуют различной скорости, и двигатели постоянного тока широко использовались. Но появление тиристоров в 1958 году и транзисторной технологии изменило ситуацию.
 Были разработаны инверторы
Были разработаны инверторы - , которые помогли в эффективном управлении скоростью. Транзисторные устройства можно было включать и выключать по желанию, и это позволяло работать в ШИМ. Базовыми схемами управления, разработанными ранее, были V/f-приводы для асинхронных машин.
- Параллельно постоянные магниты начали заменять катушки возбуждения для повышения эффективности. А использование инвертора вместе с синусоидальными машинами с постоянными магнитами позволило отказаться от щеток, чтобы увеличить срок службы и надежность двигателя.
- Следующим важным шагом стало управление этими бесщеточными машинами. Теория двух реакций (или теория dq) была представлена Андре Блонделем во Франции до 1900 года. Она сочеталась со сложными пространственными векторами, что позволяло точно моделировать машину в переходном и установившемся режимах. Впервые электрические и механические величины можно было связать друг с другом.
- Асинхронные двигатели не претерпели значительных изменений до 1960 года. Два немца – Блашке и Хассе сделали несколько ключевых инноваций, которые привели к известному теперь векторному управлению асинхронными двигателями. Векторное управление имеет дело с переходной моделью асинхронного двигателя, а не с установившимся режимом. Помимо управления отношением амплитуды напряжения к частоте, он также управляет фазой. Это помогло использовать асинхронный двигатель для управления скоростью и сервоприводов с высокой динамикой.
- Бессенсорный алгоритм стал следующим большим шагом в управлении этими двигателями. Векторное управление (или управление, ориентированное на поле) требует знания положения ротора. Раньше использовались дорогие датчики положения. Возможность оценить положение ротора на основе модели двигателя позволила двигателям работать без каких-либо датчиков.
- С тех пор мало что изменилось. Конструкция двигателя и его управление более или менее остались прежними.

Двигатели развивались с прошлого века. А электроника помогла им найти применение в различных приложениях. Большая часть электроэнергии, используемой в этом мире, потребляется двигателями!
Большая часть электроэнергии, используемой в этом мире, потребляется двигателями!
Различные типы двигателей
Двигатели можно классифицировать по-разному. Мы рассмотрим некоторые из классификаций.
Это самая общая классификация. Было много путаницы в отношении двигателей переменного и постоянного тока, и важно проводить различие между ними. Давайте придерживаться следующего соглашения: двигатели, которые требуют питания переменного тока «на своих клеммах», называются двигателями переменного тока, а которые могут работать от источника постоянного тока «на своих клеммах», называются двигателями постоянного тока . «На его клеммах» важно, потому что это исключает, какая электроника используется для запуска двигателя. Например: бесщеточный двигатель постоянного тока на самом деле не может работать напрямую от источника постоянного тока, и для него требуется электронная схема.
Электродвигатели можно классифицировать на основе источника питания и на основе коммутации — щеточные или бесщеточные, как показано ниже
Хотя я не буду углубляться в конструкцию любого из вышеперечисленных двигателей — Есть две важные темы, с которыми я хотел бы разобраться: значимость и взаимодействие потока ротора с потоком статора.
Saliency
На такие параметры машины, как создание крутящего момента и индуктивность, влияет магнитная структура машины (в машинах с постоянными магнитами). И самое основное в этом аспекте — это заметность. Значимость является мерой изменения сопротивления в зависимости от положения ротора. Пока это сопротивление постоянно при каждом положении ротора, машина называется неявнонаправленной. Если сопротивление изменяется в зависимости от положения ротора, машина называется явно выраженной.
Почему значимость важна для понимания? Поскольку явно выраженный двигатель теперь может иметь два метода создания крутящего момента. Мы можем воспользоваться изменением магнитного сопротивления в двигателе для создания реактивного момента вместе с магнитным моментом (создаваемым магнитами). Как показано на рисунке ниже, мы можем достичь более высоких уровней крутящего момента для того же тока с добавлением реактивного крутящего момента . Это будет иметь место с двигателями IPM (внутренний постоянный магнит). (Есть двигатели, которые работают исключительно на эффекте сопротивления, но мы не будем их здесь обсуждать.) Следующая тема поможет вам лучше понять потокосцепление и заметность.
(Примечание. Угол опережения на рисунке ниже относится к разнице фаз между током статора и потоком воздушного зазора.)
Поток Взаимодействие между ротором и статором ротор через воздушный зазор к статору и снова возвращается через воздушный зазор обратно к ротору, чтобы завершить петлю возбуждения. На этом пути поток встречает различные сопротивления (магнитное сопротивление). Пластины (сталь) имеют очень низкое магнитное сопротивление из-за высокого μ r (относительная проницаемость стали в пределах тысяч), тогда как воздушный зазор имеет очень высокое сопротивление (μ r примерно равно 1).
МДС (магнитодвижущая сила), развиваемая в стали, очень мала, так как ее сопротивление незначительно по сравнению с воздушным зазором. (Аналогом электрической цепи может быть: источник напряжения (магнит) пропускает ток (поток) через резистор (сопротивление воздушного зазора). Проводники (сталь), подключенные к резистору, имеют очень низкое сопротивление, и мы можем игнорировать падение напряжения. (капля MMF) через него). Таким образом, структура стали статора и ротора оказывает незначительное влияние, и вся MMF развивается через эффективное сопротивление воздушного зазора (считается, что любой цветной материал на пути потока имеет относительную проницаемость, равную проницаемости воздушного зазора) . Длина воздушного зазора пренебрежимо мала по сравнению с диаметром ротора, и можно с уверенностью предположить, что поток от ротора перпендикулярен статору. Имеются эффекты окантовки и другие нелинейности из-за пазов и зубцов, но они обычно игнорируются при моделировании машины. (Вы НЕ МОЖЕТЕ игнорировать их при проектировании машины). Но поток в воздушном зазоре определяется не только потоком ротора (магнитов в случае машины с постоянными магнитами). Ток в обмотке статора также влияет на поток. Именно взаимодействие этих двух потоков будет определять крутящий момент, действующий на двигатель. И термин, который описывает это, называется эффективной потокосцеплением воздушного зазора. Идея состоит не в том, чтобы углубляться в математику и выводить уравнения, а в том, чтобы убрать два момента:
- Нас интересует только поток в воздушном зазоре, так как в нем развивается вся МДС.
- Эффективная потокосцепление в воздушном зазоре обусловлено как током статора, так и потоком ротора (магниты), и взаимодействие между ними создает крутящий момент.
На рисунке выше показаны ротор и статор различных типов двигателей. Было бы интересно узнать, какие из них заметные, а какие нет?
Примечание: В каждом из этих двигателей отмечены две оси – D и Q. (Ось Q является магнитной осью, а ось D электрически перпендикулярна ей). Мы вернемся к осям D и Q в следующих статьях. Это не важно для вышеуказанного вопроса.
Ответ:
A,B,C – неявнонаправленные, D,E,F,G,H – явно выраженные (магниты влияют на сопротивление при различном положении ротора, см. рисунок ниже, в J,K — и ротор, и статор неявновыпуклые
На этом мы закончим эту статью. Можно было бы обсудить гораздо больше математики и машинного моделирования, но здесь это стало бы слишком сложным. Мы рассмотрели большинство тем, необходимых для понимания управления двигателем. Следующая серия статей будет непосредственно посвящена полево-ориентированному управлению (FOC), пространственно-векторной модуляции (SVM), ослаблению потока и всем практическим аппаратным и программным аспектам, в которых вы можете застрять, когда начнете проектировать контроллер.
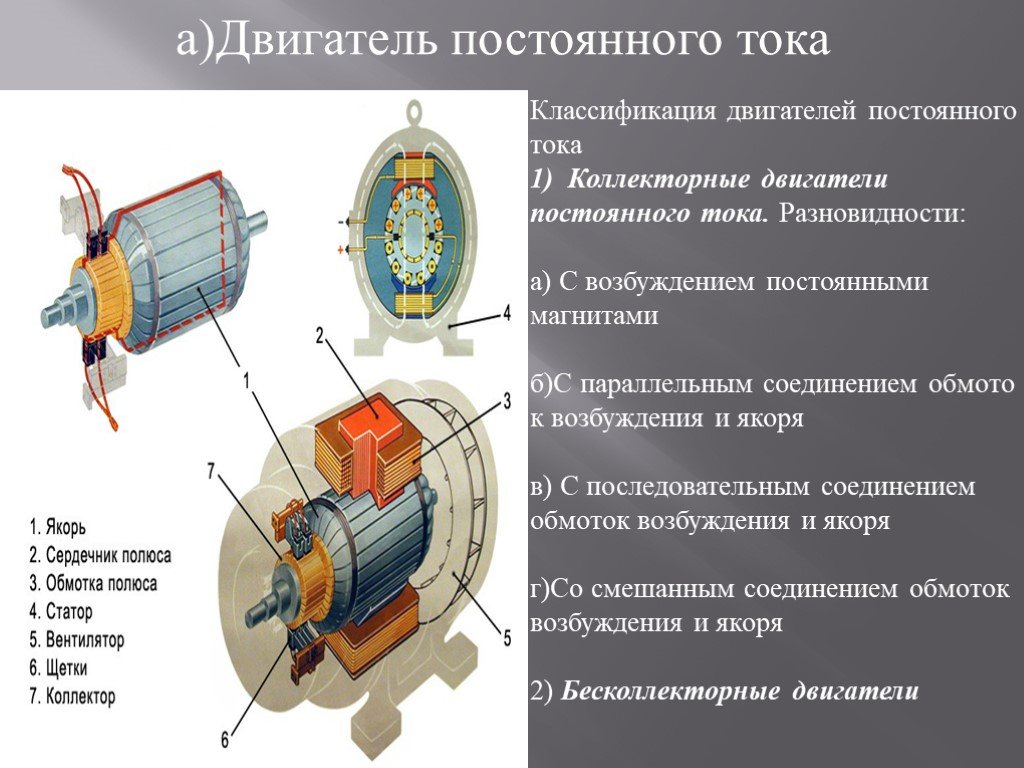
ТЕОРИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА (электрические двигатели)
4.1
4.1.1
Последовательный двигатель имеет характеристики, аналогичные характеристикам двигателя, работающего на постоянном токе. частоты энергосистемы. Однако лучше всего описывать работу постоянного и переменного тока отдельно, чтобы можно было провести сравнение.
Общая эквивалентная электрическая схема последовательного двигателя постоянного тока и ее физическая конструкция показаны на рис. 4.1 и 4.2. Двигатель состоит из статора с сосредоточенной обмоткой возбуждения (рис. 4.3), соединенного последовательно через коммутатор с
раневая арматура (рис. 4.4). Одним из первых моментов, которые необходимо учитывать при эксплуатации двигателя, является действие двигателя и генератора, которые существуют одновременно в цепи якоря двигателя. Этими двумя принципами являются (1) мгновенная электродвижущая сила (ЭДС), которая индуцируется в проводниках якоря при движении со скоростью v в магнитном поле, и (2) сила, действующая на проводники в результате переноса электрического тока. ток в этом же магнитном поле.
РИСУНОК 4.1 Схема последовательного двигателя: ra = сопротивление якоря, измеренное на щетках, rs = сопротивление основного поля и v = приложенное напряжение.
РИСУНОК 4.2 Серийный двигатель.
РИСУНОК 4.3 Один полюс последовательной обмотки возбуждения двигателя.
РИСУНОК 4.4 Раневая арматура.
Известно, что мгновенная сила, действующая на проводник длиной i, по которому течет ток i в магнитном поле B, равна:
, где 6 — угол между направлением магнитного поля и направлением тока в проводнике, B в веберах на квадратный метр (тесла), i в
ампер, i в метрах. Двигатели по своей конструкции имеют проводники якоря и магнитный поток в квадратуре друг к другу. Следовательно, сила принимает вид:
. Предположим, что на рис. 4.5 есть ситуация, когда проводник длины i находится в магнитном поле и может свободно перемещаться в направлении x, перпендикулярном полю. Из предыдущего обсуждения на проводник действует сила, заставляющая его двигаться в направлении x. Тогда:
РИСУНОК 4.5 Проводник, движущийся в магнитном поле.
Эта сила вызывает движение в проводнике, что, в свою очередь, вызывает индуцирование в этом проводнике напряжения, противоположного направлению исходного тока. Это важная концепция работы двигателей в
в целом, и она используется для обсуждения работы серийного двигателя. Это наведенное напряжение обычно называют напряжением противо-ЭДС (СЭДС) из-за его противоположности приложенному напряжению.
Этот пример также показывает, что возможен обратимый обмен энергией или мощностью (т. е. между механической и электрической системами). Следовательно, одна и та же машина может работать как двигатель или генератор, в зависимости от потока энергии в якоре.
В моторном режиме поле и якорь последовательного двигателя постоянного тока питаются одним и тем же током от приложенного напряжения, и в магнитной цепи создается магнитное поле (поток). Так как проводники якоря (катушки) расположены в этом поле, то на каждый из проводников в поле действует сила (момент), стремящаяся заставить его двигаться (вращаться), и, как мы только что указали, создается противодействующее напряжение (цмф). противодействующее приложенному напряжению. Мы должны признать, что помимо электромагнитного поля, создаваемого якорем, цепь якоря (катушки) также создает собственное магнитное поле. Якорь из-за его конструкции коллектора и щеток имеет однонаправленный ток и, следовательно, создает магнитодвижущую силу фиксированного направления (ммс), измеряемую в ампер-витках. Эта МДС является произведением эффективных витков катушки на якоре и тока через эти витки. Здесь следует понимать, что обмотка якоря должна учитываться при разработке этих ампер-витков (т. е. могут быть параллельные пути через якорь с возможностью наматывания катушек якоря последовательно или параллельно; следовательно, также будет быть делением полного тока якоря в каждой из обмоток). Эта тема будет рассмотрена позже. Ниже приводится обсуждение действия МДС, создаваемого якорем.
Реакция арматуры. По проводникам якоря протекает ток, пропорциональный нагрузке. Магнитное поле, создаваемое этим током, взаимодействует с основным полем, создаваемым тем же током, протекающим в катушках возбуждения. На рис. 4.6 показаны два так называемых пояса проводников якоря (стороны катушки) под каждой полюсной поверхностью. Каждый из проводников, составляющих эти пояса, несет ток в одном и том же направлении и, следовательно, создает дополнительную МДС. Кроме того, есть проводники, по которым также текут однонаправленные токи, но они не находятся под полюсными дугами. Важным соображением здесь является влияние присутствия магнитного материала в полюсных наконечниках, сердечнике якоря и зубцах якоря. На пути потока через якорь влияют сопротивления путей. Очевидно, что сопротивление путей потока под полюсными наконечниками меньше, чем у путей, примыкающих к щеточной области, которые составляют материал с гораздо большим сопротивлением, а именно воздух.
РИСУНОК 4.6 Магнитное поле якоря.
На рис. 4.6 показано, что щетки находятся на механической нейтральной оси (т. е. посередине между полюсами). Общее направление МДС якоря — вдоль оси щетки в квадратуре к основному полю. Примыкающие к полюсам проводники якоря создают в воздушном зазоре плотности потока, равные и противоположные на концах полюсов. Имейте в виду, что плотность потока, создаваемого якорем, напрямую связана с током якоря. (Кроме того, равномерно распределенная плотность потока в воздушном зазоре приписывается основному полю и напрямую связана с этим же током якоря.) Теперь чистая МДС (или поток в воздушном зазоре) является результатом как основного поля МДС и поле якоря МДС. Результирующий поток в воздушном зазоре теперь увеличивается на одном конце полюса и уменьшается на другом конце полюса из-за реакции якоря. Искажение потока в воздушном зазоре показано на рис. 4.7. На этом рисунке два полюса и проводники якоря под полюсами развернуты, чтобы более четко проиллюстрировать искажение. Закон Ампера полезен здесь для определения МДС якоря. Результирующий воздушный зазор mmf является результатом наложения mmf поля и якоря. Падения МДС в полюсах и якорном железе считаются пренебрежимо малыми по сравнению с воздушным зазором МДС. Для справки, предполагается, что положительное направление МДС является потоком от северного полюса. МДС якоря показана как линейная зависимость, но на самом деле, поскольку пазы якоря дискретны, эта зависимость на самом деле равна 9.0329 состоит из небольших дискретных ступенчатых переходов. Однако здесь она показана в виде плавной кривой для облегчения анализа.
Очевидно, что поток в воздушном зазоре изменяется вдоль поверхности полюса. Еще одно наблюдение из картины искажения mmf заключается в том, что в воздушном зазоре mmf очень много гармоник. Кроме того, из-за симметрии при анализе МДС воздушного зазора могут существовать только нечетные гармоники. Следует также помнить, что в случае последовательного двигателя переменного тока изменение искажения потока было бы примерно таким же, только пульсирующим.
Результаты фурье-анализа гармоник потока в воздушном зазоре для случая (NfIf)/(NaIa) = 7/5 приведены на рис. 4.8–4.10. На рисунках показаны основная, основная плюс третья и пятая гармоники и, наконец, основная и нечетная гармоники, вплоть до пятнадцатой гармоники. Величины нечетных гармоник, начинающихся с основной, равны 8,94, 0,467, 1,41, 0,924, -0,028, -0,02, 0,523 и 0,0094. То есть ряд можно представить так:
Конечно, изменение полюсной дуги или величин МДС якоря и поля изменит содержание гармоник. Изменение плотности потока через воздушный зазор вызывает два эффекта: (1) уменьшение общего потока, исходящего от каждого полюса, и (2)
РИСУНОК 4.7 Искажение потока в воздушном зазоре.
РИСУНОК 4.8 Основная частота потока воздушного зазора.
РИСУНОК 4.9 Поток в воздушном зазоре, обусловленный основной плюс третьей и пятой гармониками.
смещение электрической нейтральной оси, приводящее к проблемам коммутации из-за искажения потока.
Искажение потока, создаваемое якорем, было названо перекрестной реакцией якоря, и это правильно. Суммарный эффект показан на рис. 4.11, где показано результирующее поле, где поперечное поле якоря находится под прямым углом к основному полю. Результатом является искажение чистого потока в двигателе; второй эффект, на который указывалось ранее, — уменьшение общего потока основного поля. Это уменьшение потока не слишком очевидно; на самом деле, из рис. 4.8 почти очевидно, что векторное сложение этих двух МДС привело бы к увеличению потока, которое произошло бы со щетками на механической нейтральной оси.
РИСУНОК 4.10 Поток в воздушном зазоре из-за нечетных гармоник до пятнадцатой.
РИСУНОК 4.11 Поле якоря со смещением щеток и без него.
Это результирующее уменьшение потока может быть связано с магнитным насыщением. На рис. 4.12 показано, как это происходит, когда двигатель работает в изломе кривой насыщения. Площадь ABC пропорциональна уменьшению потока на конце полюса при уменьшении плотности потока, а площадь CDE пропорциональна увеличению потока на другом конце полюса. Обратите внимание, что уменьшение потока превышает увеличение
поток из-за эффекта насыщения. Это иногда называют размагничивающим эффектом реакции якоря. Этот эффект размагничивания может составлять порядка 4 процентов.
Искажение реакции якоря и магнитный поток могут быть уменьшены или устранены за счет компенсационных обмоток на поверхности полюса или за счет увеличения сопротивления на концах полюсов; последний либо за счет ламинирования, либо за счет неравномерного воздушного зазора.
РИСУНОК 4.12 Реакция якоря, приводящая к уменьшению потока главного полюса.
Поскольку целью коммутатора и щеток является изменение тока в короткозамкнутой катушке, скажем, с тока +I на -I в течение времени, в течение которого катушка замыкается накоротко щетками, некоторое искрение в кистях ожидается. Желательно свести к минимуму любое напряжение, индуцируемое в катушке, чтобы свести к минимуму образование дуги.
Когда щетки находятся в положении механической нейтрали и основное поле искажается, на коммутируемых катушках возникает наведенное напряжение от искаженного потока воздушного зазора. Предлагается сместить щетки в новое нейтральное положение, чтобы свести наведенное напряжение к минимуму и уменьшить искрение щеток. Следует признать, что величина искажения поля является функцией ампер-витков якоря и, следовательно, зависит от нагрузки двигателя. Затем становится понятно, что электрически нейтральное положение является функцией нагрузки и что перевод щеток в электрически нейтральное положение, следовательно, не означает их перемещение в какую-то одну точку в пространстве.
Смещение щеток вызывает еще один эффект — эффект размагничивания потока в воздушном зазоре. Этот эффект является дополнением к эффекту размагничивания, возникающему из-за насыщения. При смещении щеток смещается полюсная ось якоря.
В результате угол между основным полем и якорным полем больше 90°. Этот процесс также показан на рис. 4.11.
Таким образом, есть два процесса, которые вызывают уменьшение потока в воздушном зазоре: (1) уменьшение из-за перекрестного намагничивания, когда щетки находятся в механически нейтральном положении, что изменяет распределение потока по поверхности полюса и суммарный поток из-за эффектов насыщения и (2) размагничивания в результате смещения щеток и изменения ориентации полюсов якоря по отношению к основному полю, что приводит к тому, что поле якоря mmf имеет составляющую, прямо противоположную основному полю mmf.
Реактивное напряжение и коммутация. Ранее указывалось, что при коммутации ток в закороченной катушке (катушках) под щеткой должен реверсировать и изменить направление. Самоиндукция закороченной обмотки по закону Ленца наводит в закороченной обмотке ЭДС, противодействующую изменению тока катушки. Это напряжение иногда называют реактивным напряжением. (На самом деле, это может быть только часть напряжения реактивного сопротивления, как будет показано ниже.) Это напряжение замедляет изменение направления тока и имеет тенденцию вызывать искры или искрение, когда замыкающая шина коммутатора покидает щетку. Реактивное напряжение препятствует хорошей коммутации. Величина этого напряжения напрямую зависит от квадрата числа витков катушки, протекающего тока и скорости якоря; оно обратно пропорционально сопротивлению магнитного пути.
При перемещении щеток для поиска электрического нейтрального положения на двигателе переключение выполняется в направлении, противоположном вращению якоря. Следует помнить, что реактивное напряжение представляет собой напряжение e = L(di/dt) и просто связано с изменением тока во время коммутации. Это не имеет ничего общего с наведенным напряжением от потока в воздушном зазоре. Перестановка щеток действительно не помогает реактивному напряжению. Теоретически на нейтральной оси нет наведенного напряжения от потока двигателя (на самом деле dX/dt здесь должно быть равно нулю, так как стороны катушки движутся параллельно потоку). Чтобы противодействовать напряжению реактивного сопротивления и индуцировать напряжение, противоположное напряжению реактивного сопротивления, щетки должны быть смещены дальше назад, чем ось магнитного нейтрали. В этот момент в коммутируемой катушке за счет потока поля индуцируется напряжение dX/dt, которое противодействует напряжению реактивного сопротивления. В результате в короткозамкнутую катушку индуцируются два напряжения противоположной полярности, что снижает искрение щеток.
Важным соображением является то, что может быть другая составляющая напряжения реактивного сопротивления, которая может возникнуть, когда две стороны катушки находятся в одном и том же слоте и обе подвергаются коммутации. Тогда имеется следующий термин самоиндукции:
, где рассматриваемая катушка является катушкой, несущей ток i1, а катушка в том же слоте, подвергающаяся коммутации, несет ток i2. Если между катушками больше связи, может существовать больше взаимных терминов.
Щетки являются очень важным фактором, и, вопреки обычным электрическим принципам, можно было бы предположить, что поддержание низкого сопротивления щеток поможет уменьшить искрение на границе раздела щеточных коллекторных стержней. Это далеко от правды. Фактически коммутация сопротивления теперь является общепринятой технологией. Щетки обычно имеют графитовый или углеродный состав и, следовательно, по своим характеристикам вносят сопротивление в поверхность раздела. Если бы можно было достичь постоянной плотности тока на щетке для всех нагрузок и скоростей, то для коммутации существовали бы идеальные условия. На рис. 4.13 показано, что произойдет, если принять идеальные условия. Предположения следующие:
РИСУНОК 4. 13 Линейная коммутация.
• Ширина щетки равна ширине сегмента коллектора.
• Плотность тока под щеткой постоянна.
• Реактивное напряжение и сопротивление равны нулю.
• Изоляция коллекторной шины мала по сравнению с шириной сегмента коллектора.
Обратите внимание, что при прохождении коллектора под щеткой, при данных предположениях, контактное сопротивление обратно пропорционально площади контакта. Последовательность на рис. 4.13 иллюстрирует, как происходит изменение тока в катушке якоря в этих идеальных условиях. Это изменение поверхностного контакта изменяет контактное сопротивление щетки; следовательно, при постоянной плотности тока изменение протекающего тока изменяется линейно в зависимости от контактного сопротивления. Помните, сопротивление обратно пропорционально площади контакта. Эта идеальная коммутация была названа линейной коммутацией из-за линейной передачи тока в коммутируемой катушке, как показано на рис. 4.13.
Если ширина щетки больше, чем у одного сегмента коммутатора, линейная коммутация все еще существует, поскольку сопротивление по-прежнему изменяется линейно; следовательно, плотность тока остается постоянной. Период коммутации больше; следовательно, скорость изменения тока di/dt уменьшается, и, следовательно, также уменьшается реактивное напряжение.
Все допущения, сделанные в предыдущем анализе, не могут быть реализованы, и в результате получается нелинейная коммутация. Катушки якоря обладают сопротивлением, имеют собственную и взаимную индуктивность, поэтому линейная коммутация не может быть достигнута.
Если эти нелинейности имеют место, то имеет место либо недокоммутация, либо перекоммутация. Они показаны на рис. 4.14. Поскольку нагрев щетки является произведением сопротивления щетки на квадрат тока, предпочтительнее использовать линейную коммутацию, поскольку она сводит к минимуму нагрев щетки. То есть квадратное значение трех форм коммутации тока на рис. 4.13 наименьшее для линейной коммутации.
РИСУНОК 4.14 Перекоммутация, недостаточная коммутация и линейная коммутация.
Можно разработать схемную модель процесса коммутации, как показано на рис. 4.15. Факторы были описаны ранее, и здесь они переформулированы. Рассмотрим испытуемую катушку из витков Nh и собственной индуктивности L11, а также коммутируемый ток i1.
1. Напряжение собственной индуктивности (напряжение реактивного сопротивления) коммутируемой катушки
где i1 – коммутируемый ток, а L11 – собственная индуктивность коммутируемой катушки.
РИСУНОК 4.15 Коммутационные напряжения.
2. Напряжение взаимной индуктивности соседней катушки, находящейся в том же пазу с током i2, коммутируемой и связанной с рассматриваемой катушкой, составляет
, где М12 — взаимная индуктивность между соседними катушками.
3. Напряжение, наводимое в исследуемую катушку витков N1 при отрезании потока §а за счет якоря mmf, составляет
4. Имеются падения напряжения из-за сопротивления катушки rc; Rc и Rc — левое и правое контактные сопротивления на щетке; и щеточное сопротивление между сегментами коммутатора rb.
Процесс коммутации не прост, и состав щетки и интерфейсная пленка, измерения и условия могут помочь в процессе коммутации. Чрезвычайно важно поддерживать подходящую межфазную пленку между щеткой и медным коллектором. Этот интерфейс образован оксидом меди и свободными частицами графитовой пленки; он обеспечивает коммутацию общего сопротивления и подает смазку для уменьшения поверхностного трения и нагрева между коллектором и щеткой.
Моментно-скоростные характеристики двигателей постоянного тока. Электрическая эквивалентная установившаяся схема является наиболее подходящим методом анализа двигателя. Эта эквивалентная схема для удобства повторена на рис. 4.16.
РИСУНОК 4.16 Электрическая схема последовательного двигателя постоянного тока.
Запись закона напряжения Кирхгофа вокруг контура дает:
ПротивоЭДС Eg рассматривалась ранее при обсуждении напряжения, наведенного в проводнике длиной i и движущемся со скоростью v, перпендикулярной магнитному полю с плотностью потока B. Счетчик напряжение ЭДС Eg выражается как e и определяется как:
Необходимо изменить это и выразить e через параметры двигателя. Начиная с закона Фарадея:
, где N — количество проводников на дорожку якоря, когда Z — общее количество проводников (сторон катушки) на якоре. Тогда:
Z = количество пазов x витков/паз x витков/виток x 2 (проводников/виток) a = количество параллельных путей через якорь P = количество полюсов n = скорость якоря, об/мин
Тогда:
Для крутящий момент:
КПД двигателей постоянного тока. Предыдущее обсуждение показало, что в последовательном двигателе возникает ряд потерь. Эти потери можно резюмировать следующим образом:
3. Потеря контакта со щетками
4. Трение (трение щеток и подшипников) и ветер
5. Потери в сердечнике (гистерезис и вихревые токи)
6. Потери на блуждающие нагрузки (потери в дополнение к указанным выше)
Необходимо сделать комментарий на потерю контакта с щеткой, указанную под номером 3. Эксперименты и спецификации Института инженеров по электротехнике и электронике (IEEE) предложили в качестве приближения, что
Потеря контакта с щеткой = падение напряжения на щетке x ток щетки якоря (4.29)
Это выражение было получено при для угольных или графитовых щеток путем наблюдения за падением напряжения на щетках в зависимости от плотности тока. При высокой и малой установившейся плотности тока напряжение падает и приближается к нулю. Однако между этими пределами падение напряжения примерно постоянно и составляет около 1 В на щетку. Таким образом, для пары щеток это значение становится равным 2 В. На небольших машинах это падение напряжения имеет тенденцию к увеличению, поскольку имеет тенденцию к увеличению падения напряжения при более низких температурах щеток и коллектора.
Углеродные и графитовые материалы имеют удельное сопротивление во много раз больше, чем у меди, и имеют отрицательный температурный коэффициент. Этот отрицательный температурный коэффициент связан с увеличением падения напряжения на щетках в небольших машинах.