8 класс. Геометрия. Векторы. Повторение теории. Решение задач с применением векторов. — Векторы. Повторение теории. Решение задач с применением векторов.
Комментарии преподавателяПовторение теории. Задачи
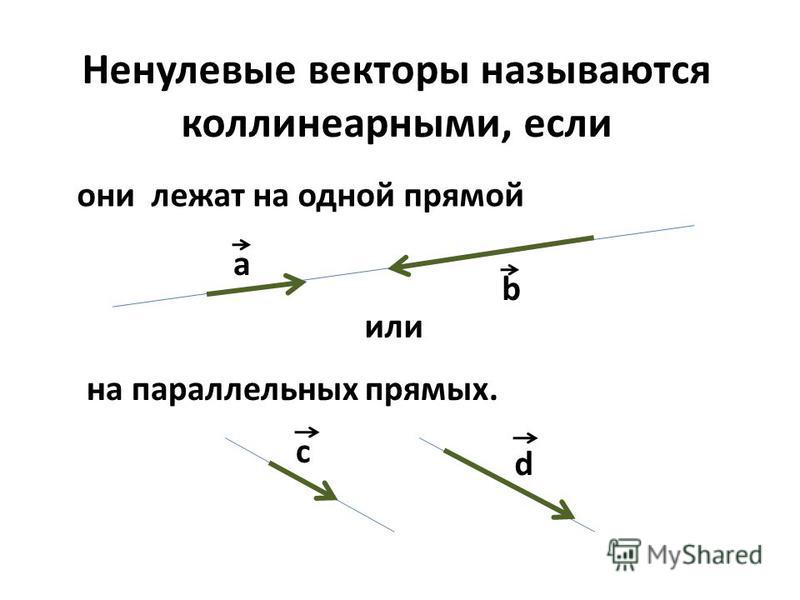
Напомним, что существуют такие физические величины, для которых важна не только величина, но и направление. Такие величины называются векторными, или векторами, и обозначаются они направленным отрезком, то есть таким отрезком, у которого отмечены начало и конец. Введено было понятие коллинеарных векторов, то есть таких, которые лежат либо на одной прямой, либо на параллельных прямых.
Мы рассматриваем вектор, который можно отложить от любой точки, заданный вектор от произвольно выбранной точки можно отложить единственным образом.
Было введено понятие равных векторов – это такие сонаправленные векторы, длины которых равны. Сонаправленными называются коллинеарные векторы, направленные в одну сторону.
Сонаправленными называются коллинеарные векторы, направленные в одну сторону.
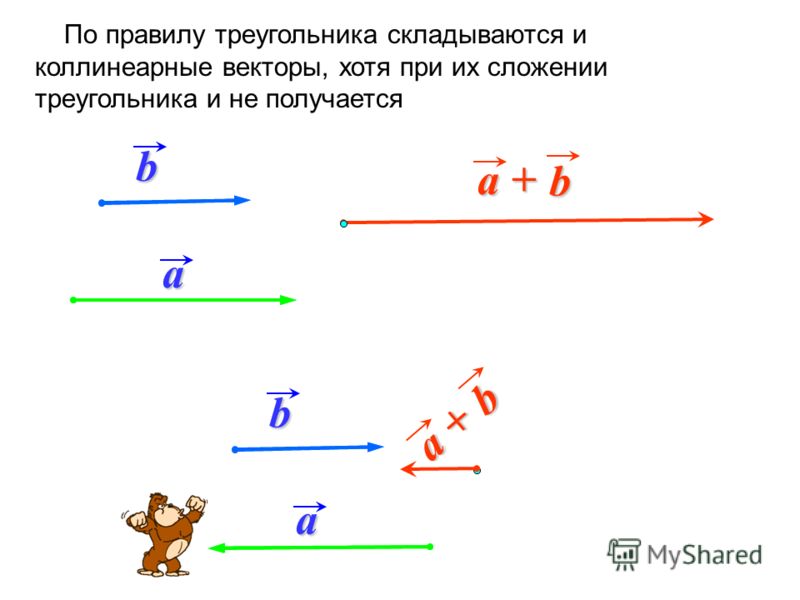
Были введены правила треугольника и параллелограмма – правила сложения векторов.
Заданы два вектора – векторы и . Найдем сумму этих двух векторов . Для этого отложим из некоторой точки А вектор . – направленный отрезок, точка А – его начало, а точка В – конец. Из точки В отложим вектор . Тогда вектор называют суммой заданных векторов: – правило треугольника (см. Рис. 1).
Рис. 1
Задано два вектора – векторы и . Найдем сумму этих двух векторов по правилу параллелограмма.
Откладываем из точки А вектор и вектор (см. Рис. 2). На отложенных векторах можно построить параллелограмм. Из точки В откладываем вектор , векторы и равны, стороны ВС и
Рис. 2
АВ1 параллельны. Аналогично параллельны и стороны АВ и В1С, таким образом, мы получили параллелограмм. АС – диагональ параллелограмма.
АС – диагональ параллелограмма.
Для сложения нескольких векторов применяют правило многоугольника (см. Рис. 3). Нужно из произвольной точки отложить первый вектор, из его конца отложить второй вектор, из конца второго вектора отложить третий и так далее, когда все векторы отложены – соединить начальную точку с концом последнего вектора, в итоге получится сумма нескольких векторов.
Рис. 3
Кроме того, мы рассмотрели понятие обратного вектора – вектора, имеющего такую же длину, как заданный, но ему противонаправленного.
Пример 1 – задача 747: выпишите пары коллинеарных сонаправленных векторов, которые определяются сторонами параллелограмма; укажите противоположно направленные векторы;
Задан параллелограмм MNPQ (см. Рис. 4). Выпишем пары коллинеарных векторов. В первую очередь это векторы и . Они не только коллинеарные, но и равные, т. к. они сонаправлены, и длины их равны по свойству параллелограмма (в параллелограмме противоположные стороны равны). Следующая пара . Аналогично
к. они сонаправлены, и длины их равны по свойству параллелограмма (в параллелограмме противоположные стороны равны). Следующая пара . Аналогично
Рис. 4
выпишем коллинеарные векторы второй пары сторон: ; .
Противоположно направленные векторы: , , , .
Пример 2 – задача 756: начертите попарно неколлинеарные векторы , и . Постройте векторы ;; ;.
Для выполнения данного задания можем пользоваться правилом треугольника или параллелограмма.
Способ 1 – с помощью правила треугольника (см. Рис. 5):
Рис. 5
Способ 2 – с помощью правила параллелограмма (см. Рис. 6):
Рис. 6
Комментарий: мы применяли в первом способе правило треугольника – откладывали из произвольно выбранной точки А первый вектор, из его конца – вектор, противоположный второму, соединяли начало первого с концом второго, и таким образом получали результат вычитания векторов.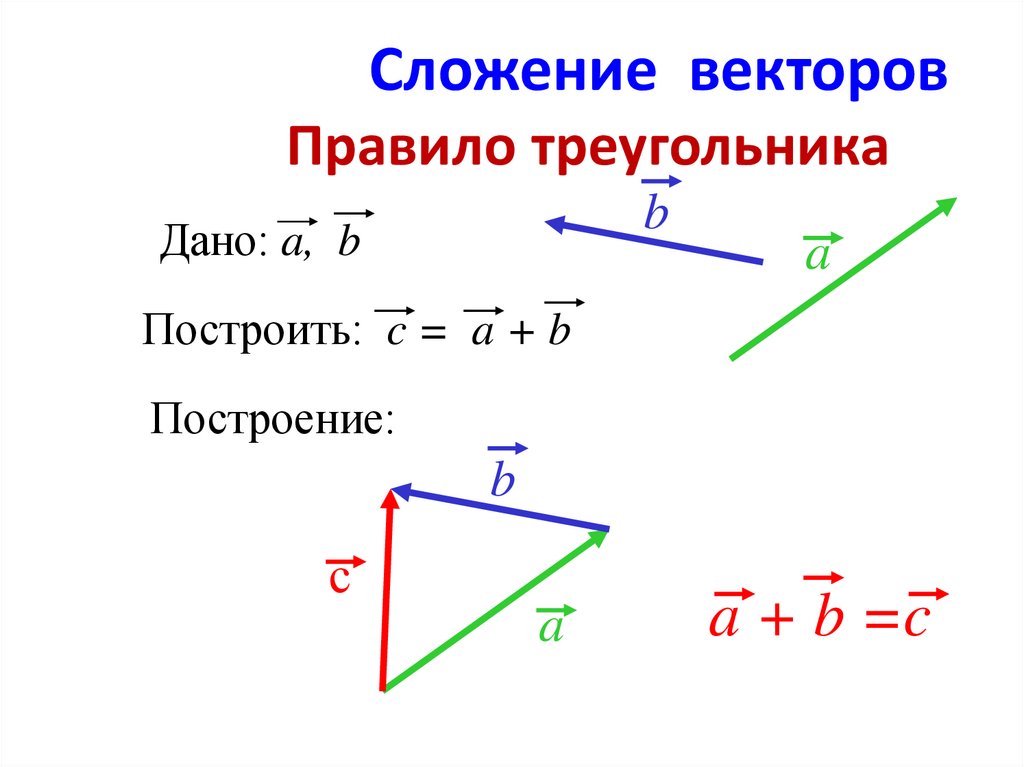 Во втором способе мы применили правило параллелограмма – построили на нужных векторах параллелограмм и его диагональ – искомую разность, помня тот факт, что одна из диагоналей – это сумма векторов, а вторая – разность.
Во втором способе мы применили правило параллелограмма – построили на нужных векторах параллелограмм и его диагональ – искомую разность, помня тот факт, что одна из диагоналей – это сумма векторов, а вторая – разность.
Пример 3 – задача 750: докажите, что если векторы и равны, то середины отрезков AD и BC совпадают. Докажите обратное утверждение: если середины отрезков AD и BC совпадают, то векторы и равны (см. Рис. 7).
Из равенства векторов и следует, что прямые АВ и CD параллельны, и что отрезки АВ и CD равны. Вспомним признак параллелограмма: если у четырехугольника пара противоположных сторон лежит на параллельных прямых, и их длины равны, то данный четырехугольник – параллелограмм.
Рис. 7
Таким образом, четырехугольник ABCD, построенный на заданных векторах, – параллелограмм. Отрезки AD и BC являются диагоналями параллелограмма, одно из свойств которого: диагонали параллелограмма пересекаются и в точке пересечения делятся пополам.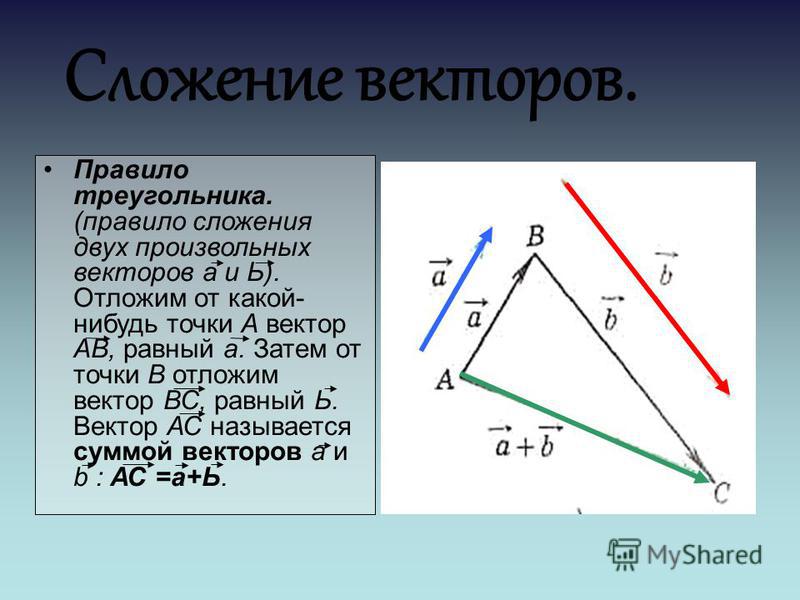 Таким образом, доказано, что середины отрезков AD и BC совпадают.
Таким образом, доказано, что середины отрезков AD и BC совпадают.
Докажем обратное утверждение. Для этого воспользуемся другим признаком параллелограмма: если в некотором четырехугольнике диагонали пересекаются и точкой пересечения делятся пополам, то этот четырехугольник – параллелограмм. Отсюда четырехугольник ABCD – параллелограмм, и его противоположные стороны параллельны и равны, таким образом, векторы и коллинеарны, очевидно, что они сонаправлены, и модули их равны, отсюда векторы и равны, что и требовалось доказать.
Пример 4 – задача 760: докажите, что для любых неколлинеарных векторов и справедливо неравенство (см. Рис. 8)
Отложим из произвольной точки А вектор , получим точку В, из нее отложим неколлинеарный ему вектор . По правилу параллелограмма или треугольника получим сумму векторов – вектор .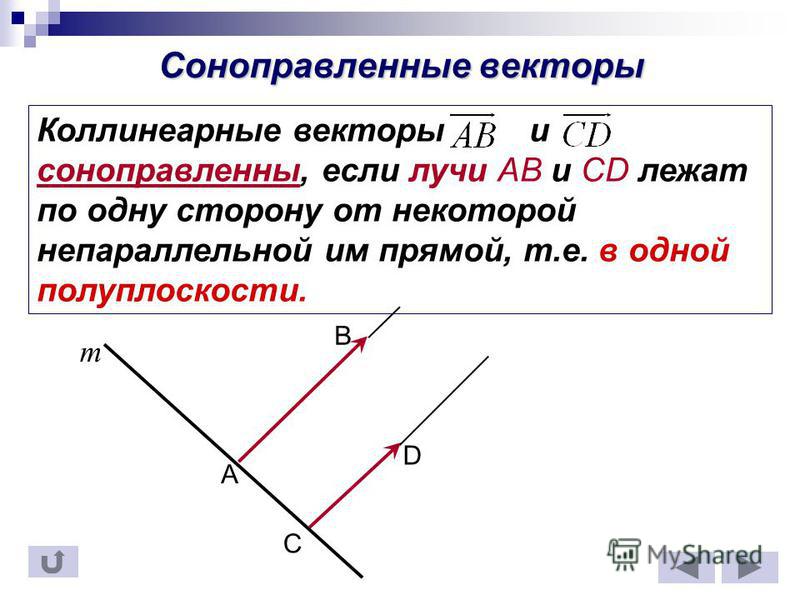 Имеем треугольник .
Имеем треугольник .
Длина суммы векторов соответствует длине стороны АС треугольника. По неравенству треугольника длина стороны АС меньше, чем сумма длин двух других сторон АВ и ВС, что и требовалось доказать.
Рис. 8
Применение векторов к решению задач
Напомним, что мы уже изучили некоторые факты о векторах, и теперь умеем определять равные векторы, коллинеарные векторы, сонаправленные и противоположно направленные. Также мы умеем складывать векторы по правилу треугольника и параллелограмма, складывать несколько векторов по правилу многоугольника, умеем умножать вектор на число. Решение задач с векторами использует все эти знания. Перейдем к решению некоторых примеров.
Пример 1 – задача 769: отрезок ВВ1 – медиана треугольника . Выразите через векторы и векторы , , и .
Отметим, что векторы и неколлинеарны, то есть прямые АВ и АС не параллельны.
В дальнейшем мы узнаем, что любой вектор может быть выражен через два неколлинеарных вектора.
Выразим первый вектор (см. Рис. 1): , т. к. по условию ВВ1 – медиана треугольника, значит, векторы и имеют равные модули, кроме того, очевидно, что они коллинеарны и при этом сонаправлены, значит, данные вектора равны.
Рис. 1
Для выражения следующего вектора воспользуемся правилом параллелограмма для вычитания. Мы помним, что одна из диагоналей параллелограмма, построенного на двух векторах, соответствует сумме этих векторов, а вторая – их разности. Диагональ, соответствующая разности векторов, следует от конца к началу, таким образом, если построить на заданных векторах и параллелограмм, то его диагональ будет соответствовать разности .
Вектор является противоположным к заданному вектору , отсюда .
Вектор аналогично вектору можно представить в виде разности векторов .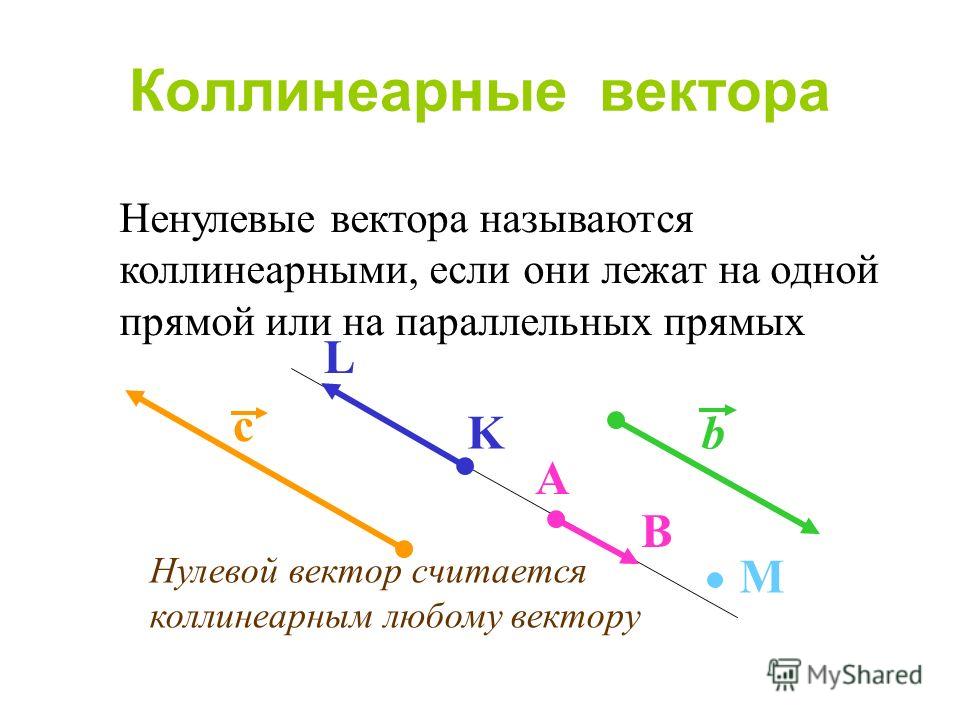 При выражении следует учесть тот факт, что точка В1 является серединой отрезка АС, значит, векторы и равны, значит, вектор можно представить как удвоенное произведение вектора .
При выражении следует учесть тот факт, что точка В1 является серединой отрезка АС, значит, векторы и равны, значит, вектор можно представить как удвоенное произведение вектора .
Перед решением задачи мы сказали, что через заданные два неколлинеарных вектора можно выразить любой вектор. Выразим, например, медиану АА1 (см. Рис. 2).
Получили систему уравнений, выполним их сложение:
Векторы в сумме составляют нулевой вектор, так как они коллинеарны и противонаправлены, а модули их равны, таким образом получаем:
Рис. 2
Поделим обе части уравнения на два, получим:
Из данной задачи можно сделать вывод, что если заданы два неколлинеарных вектора, то любой третий вектор на плоскости можно однозначно выразить через эти два вектора. Для этого необходимо применить правило сложения векторов, либо методом треугольника, либо параллелограмма, и правило умножения вектора на число.
Пример 2: доказать с помощью векторов свойство средней линии треугольника (см. Рис. 3).
Задан произвольный треугольник , точки M и N – середины сторон АВ и АС соответственно, MN – средняя линия треугольника. Свойство средней линии: средняя линия параллельна основанию треугольника и равна его половине.
Доказательство данного свойства аналогично для треугольника и трапеции.
Рис. 3
Выразим вектор двумя способами:
Получили систему уравнений:
Выполним сложение уравнений системы:
Сумма векторов – это нулевой вектор, длины этих векторов равны по условию, кроме того, они очевидно коллинеарны и противонаправлены. Аналогично суммой векторов будет нулевой вектор. Получаем:
Поделим обе части уравнения на два:
Таким образом, мы получили, что средняя линия треугольника равна половине его основания. Кроме того, из равенства вектора половине вектора следует, что эти векторы коллинеарны и сонаправлены, а значит, прямые MN и ВС параллельны.
Кроме того, из равенства вектора половине вектора следует, что эти векторы коллинеарны и сонаправлены, а значит, прямые MN и ВС параллельны.
Таким образом, мы доказали свойство средней линии трапеции при помощи векторов.
Пример 3: задан произвольный треугольник (см. Рис. 4). В нем проведены медианы АА1, ВВ1, СС1. Точка пересечения медиан – М. Вектор соответствует силе , – силе , – силе . Доказать, что .
Напомним, что медианы треугольника пересекаются в одной точке и этой точкой делятся в отношении 2:1, считая от вершины.
Иногда точку пересечения медиан называют центром тяжести треугольника.
Выполним сложение векторов , воспользуемся для этого правилом параллелограмма (см. Рис. 5).
Рис. 4
Получаем:
С другой стороны, , так как BMCD – параллелограмм, диагонали параллелограмма точкой пересечения делятся пополам, А1 – точка пересечения диагоналей параллелограмма, значит, отрезки МА1 и А1D равны, отсюда, по свойству точки пересечения медиан, длины векторов и равны, но данные векторы противонаправлены, а значит, их сумма
Рис.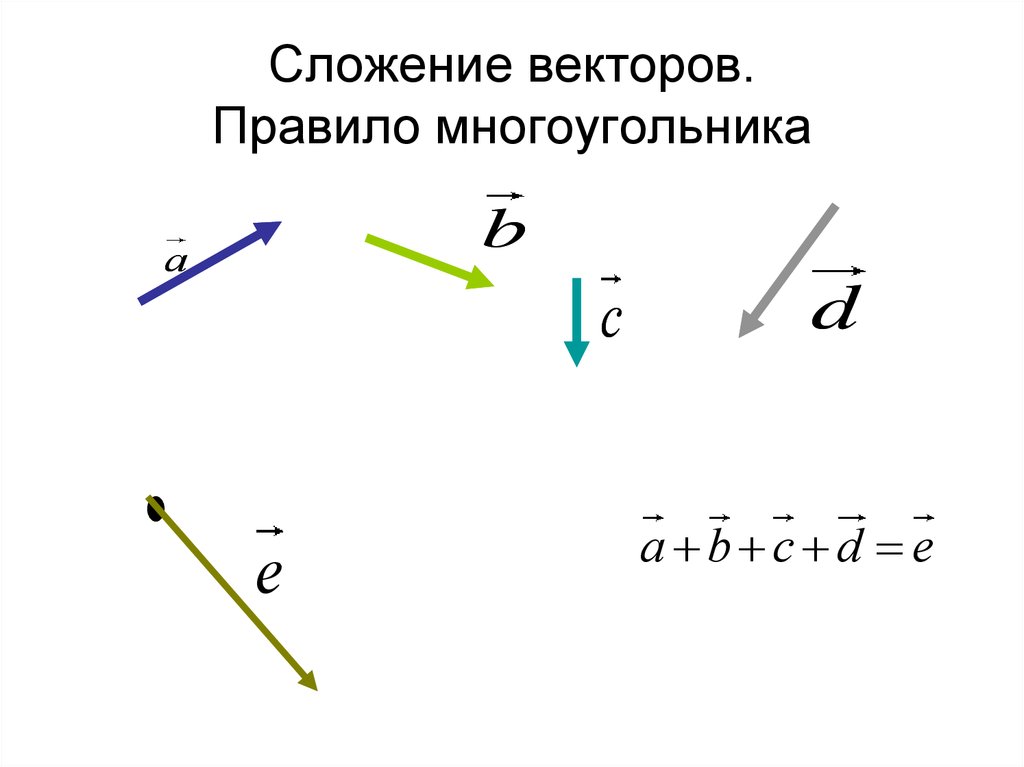 5
5
равна нулевому вектору. Мы помним, что вектор , а вектор , таким образом, , что и требовалось доказать.
Пример 4 – задача 773: докажите, что для любых векторов и справедливо следующее неравенство:
Решение: представим разность векторов в виде суммы: . Также обратим внимание на тот факт, что длины противонаправленных векторов и равны: . Таким образом, можно переписать исходное выражение:
Для удобства введем новую переменную: и перепишем выражение:
. А данное неравенство – неравенство треугольника – было доказано в предыдущем уроке. Отметим, что равенство наблюдается в том случае, когда треугольник вырождается в отрезок.
Итак, мы вспомнили все основные определения и свойства векторов, вспомнили основные операции над векторами, рассмотрели применение векторов при решении различных задач, доказали некоторые свойства фигур и решили наиболее распространенные типы задач.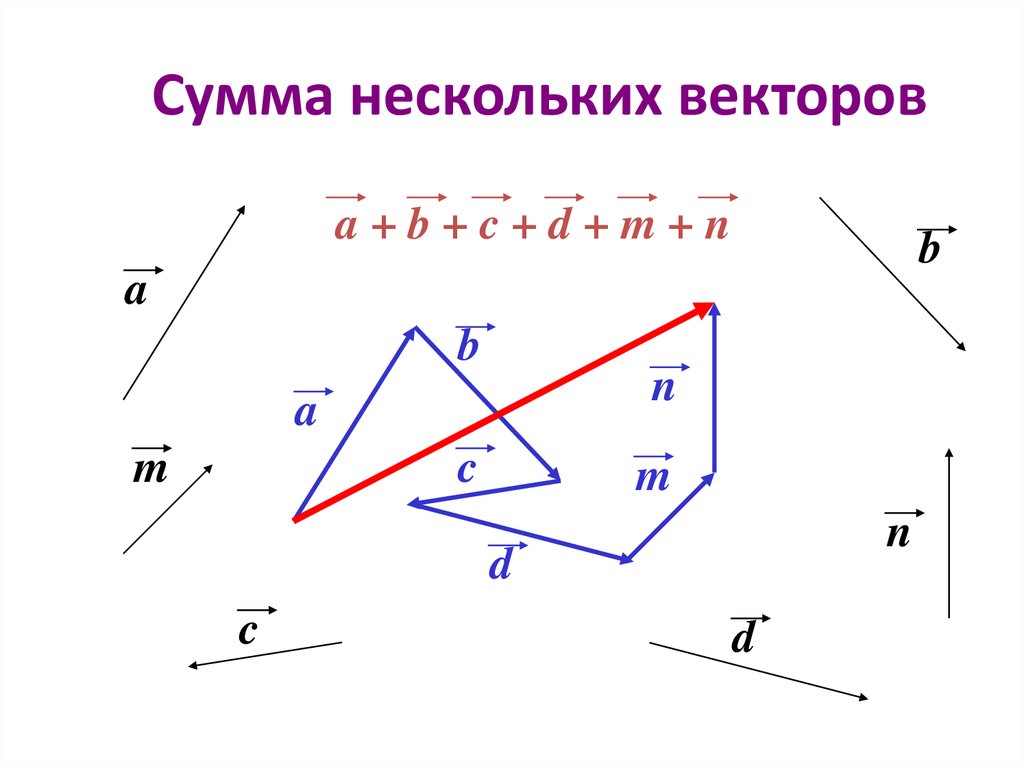
ИСТОЧНИК
http://interneturok.ru/ru/school/geometry/8-klass/vektory/vektory-povtorenie-teorii-zadachi
http://interneturok.ru/ru/school/geometry/8-klass/vektory/primenenie-vektorov-k-resheniyu-zadach
http://metodbook.ru/index.php/matematika/9-testy-po-geometrii-9-klass/8-itogovyj-test-po-teme-vektory-variant-1.html
http://metodbook.ru/index.php/matematika/9-testy-po-geometrii-9-klass/9-itogovyj-test-po-teme-vektory-variant-2.html
http://uslide.ru/images/22/28455/960/img5.jpg
http://www.studfiles.ru/html/2706/538/html_OqWQ3sDQeV.5bGa/htmlconvd-WBhq8w_html_73af1ab4.png
http://uchkollektor39.ru/uploads/images/items/29cc1d8d90989d9f0e3df70c3d95a9ee.jpg
http://rushkolnik.ru/tw_files2/urls_3/891/d-890061/890061_html_m5ff065f.jpg
http://cs1-48v4.vk-cdn.net/p24/3551abddfac0c8.mp3?extra=amJxaBk9gfTT0lPmsOEwb8Rn_T2twbNJh2OUazYT-T9cSSu4_1787ibMzOu6ytv1rZKrpdEq7XnWZN1f-bjAuKyWIFf7mzw
http://matssir.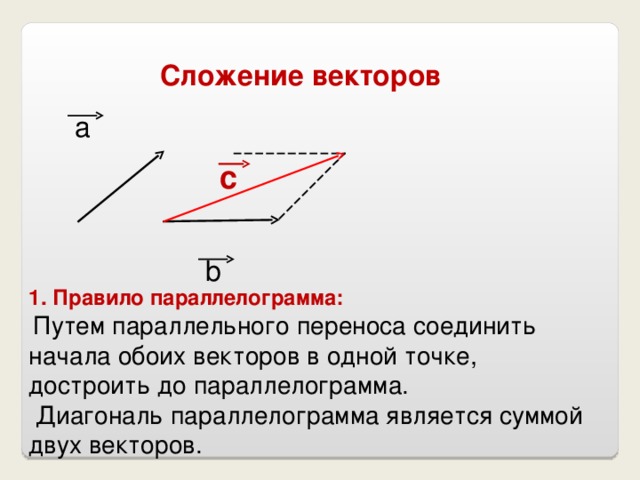 ucoz.ru/_ld/0/33_G8p84-85.pptx
ucoz.ru/_ld/0/33_G8p84-85.pptx
http://nsportal.ru/sites/default/files/2014/05/11/vektory._dokazatelstvo.pptx
http://v.5klass.net/zip/b66d124d0243f848a0bf454b75404034.zip
ОглавлениеПРЕДИСЛОВИЕАНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ § 1. Понятие о предмете аналитической геометрии § 2. Координаты § 3. Прямоугольная система координат § 4. 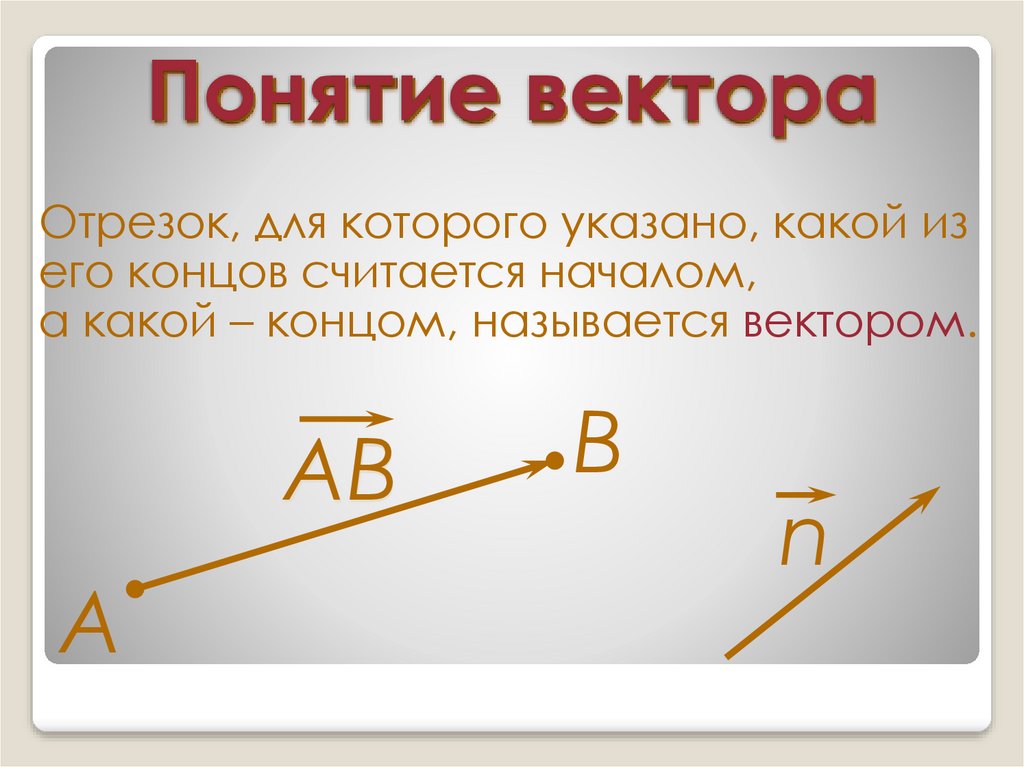 Прямоугольные координаты Прямоугольные координаты§ 5. Координатные углы § 6. Косоугольная система координат § 8. Взаимное расположение линии и точки § 9. Взаимное расположение двух линий § 10. Расстояние между двумя точками § 11. Деление отрезка в данном отношении § 11а. Деление отрезка пополам § 12. Определитель второго порядка § 13. Площадь треугольника § 14. Прямая линия; уравнение, разрешенное относительно ординаты (с угловым коэффициентом) § 15. Прямая, параллельная оси § 16. Общее уравнение прямой § 17. Построение прямой по ее уравнению § 18. Условие параллельности прямых § 19. Пересечение прямых § 20. Условие перпендикулярности двух прямых § 21. Угол между двумя прямыми § 22. Условие, при котором три точки лежат на одной прямой § 24. Пучок прямых § 25. Уравнение прямой, проходящей через данную точку параллельно данной прямой § 26. Уравнение прямой, проходящей через данную точку перпендикулярно данной прямой § 27. 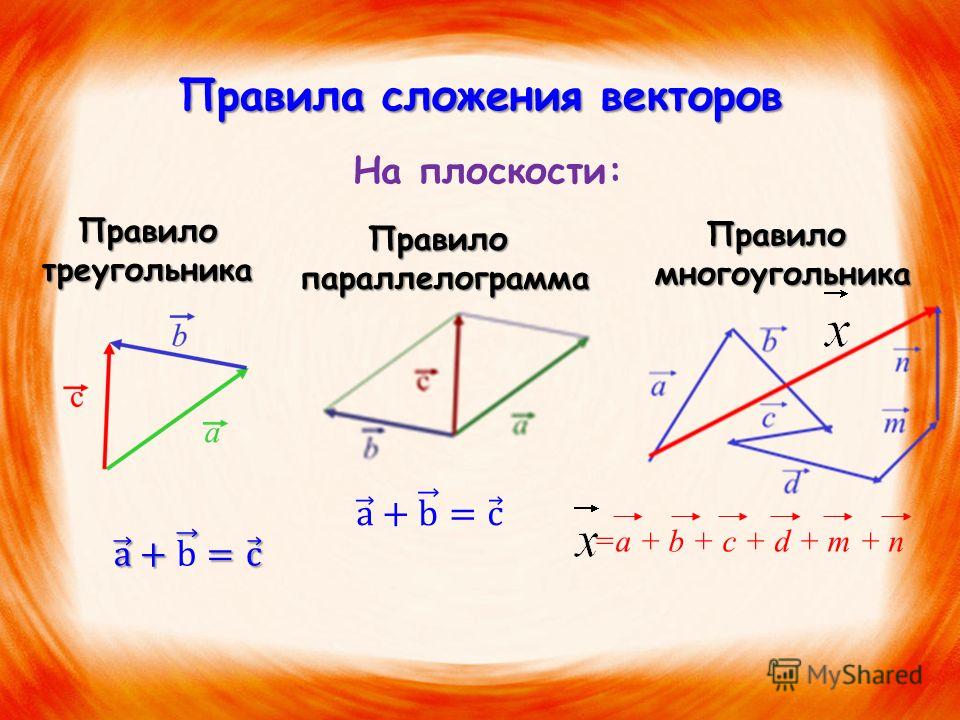 2+bx+c 2+bx+c§ 51. Директрисы эллипса и гиперболы § 52. Общее определение эллипса, гиперболы и параболы § 53. Конические сечения § 54. Диаметры конического сечения § 55. Диаметры эллипса § 56. Диаметры гиперболы § 57. Диаметры параболы § 58. Линии второго порядка § 59. Запись общего уравнения второй степени § 60. Упрощение уравнения второй степени; общие замечания § 62. Завершающее преобразование уравнения второй степени § 63. О приемах, облегчающих упрощение уравнения второй степени § 64. Признак распадения линий второго порядка § 65. Нахождение прямых, составляющих распадающуюся линию второго порядка § 66. Инварианты уравнения второй степени § 67. Три типа линий второго порядка § 68. Центральные и нецентральные линии второго порядка § 69. Нахождение центра центральной линии второго порядка § 70. Упрощение уравнения центральной линии второго порядка § 71. 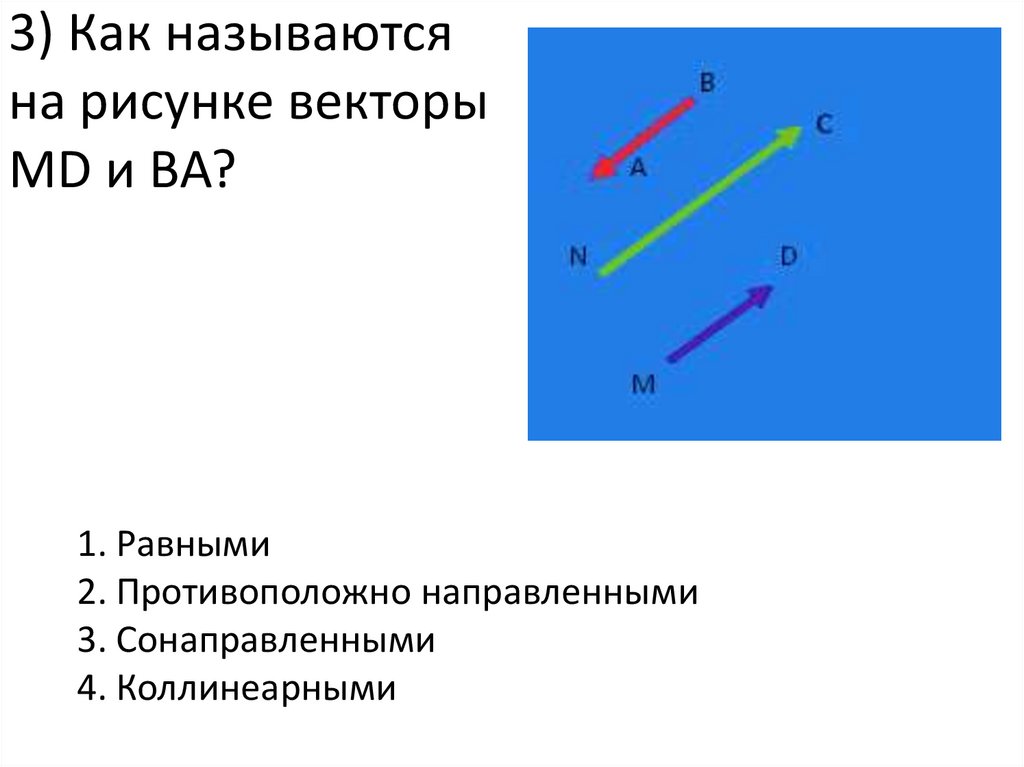 § 72. Равносторонняя гипербола как график уравнения y=(mx+n)/(px+q) § 73. Полярные координаты § 74. Связь между полярными и прямоугольными координатами § 75. Архимедова спираль § 76. Полярное уравнение прямой § 77. Полярное уравнение конического сечения АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ § 78. Понятие о векторах и скалярах § 79. Вектор в геометрии § 80. Векторная алгебра § 81. Коллинеарные векторы § 82. Нуль-вектор § 83. Равенство векторов § 84. Приведение векторов к общему началу § 85. Противоположные векторы § 87. Сумма нескольких векторов § 88. Вычитание векторов § 89. Умножение и деление вектора на число § 90. Взаимная связь коллинеарных векторов (деление вектора на вектор) § 91. Проекция точки на ось § 92. Проекция вектора на ось § 93. Основные теоремы о проекциях вектора § 94. Прямоугольная система координат в пространстве § 95.  Координаты точки Координаты точки§ 96. Координаты вектора § 97. Выражения вектора через компоненты и через координаты § 98. Действия над векторами, заданными своими координатами § 99. Выражение вектора через радиусы-векторы его начала и конца § 100. Длина вектора. Расстояние между двумя точками § 102. Признак коллинеарности (параллельности) векторов § 103. Деление отрезка в данном отношении § 104. Скалярное произведение двух векторов § 104а. Физический смысл скалярного произведения § 105. Свойства скалярного произведения § 106. Скалярные произведения основных векторов § 107. Выражение скалярного произведения через координаты сомножителей § 108. Условие перпендикулярности векторов § 109. Угол между векторами § 110. Правая и левая системы трех векторов § 111. Векторное произведение двух векторов § 112. Свойства векторного произведения § 113. Векторные произведения основных векторов § 114.  § 115. Компланарные векторы § 116. Смешанное произведение § 117. Свойства смешанного произведения § 118. Определитель третьего порядка § 119. Выражение смешанного произведения через координаты сомножителей § 120. Признак компланарности в координатной форме § 121. Объем параллелепипеда § 122. Двойное векторное произведение § 123. Уравнение плоскости § 124. Особые случаи положения плоскости относительно системы координат § 125. Условие параллельности плоскостей § 126. Условие перпендикулярности плоскостей § 128. Плоскость, проходящая через данную точку параллельно данной плоскости § 129. Плоскость, проходящая через три точки § 130. Отрезки на осях § 131. Уравнение плоскости в отрезках § 132. Плоскость, проходящая через две точки перпендикулярно данной плоскости § 133. Плоскость, проходящая через данную точку перпендикулярно двум плоскостям § 134. 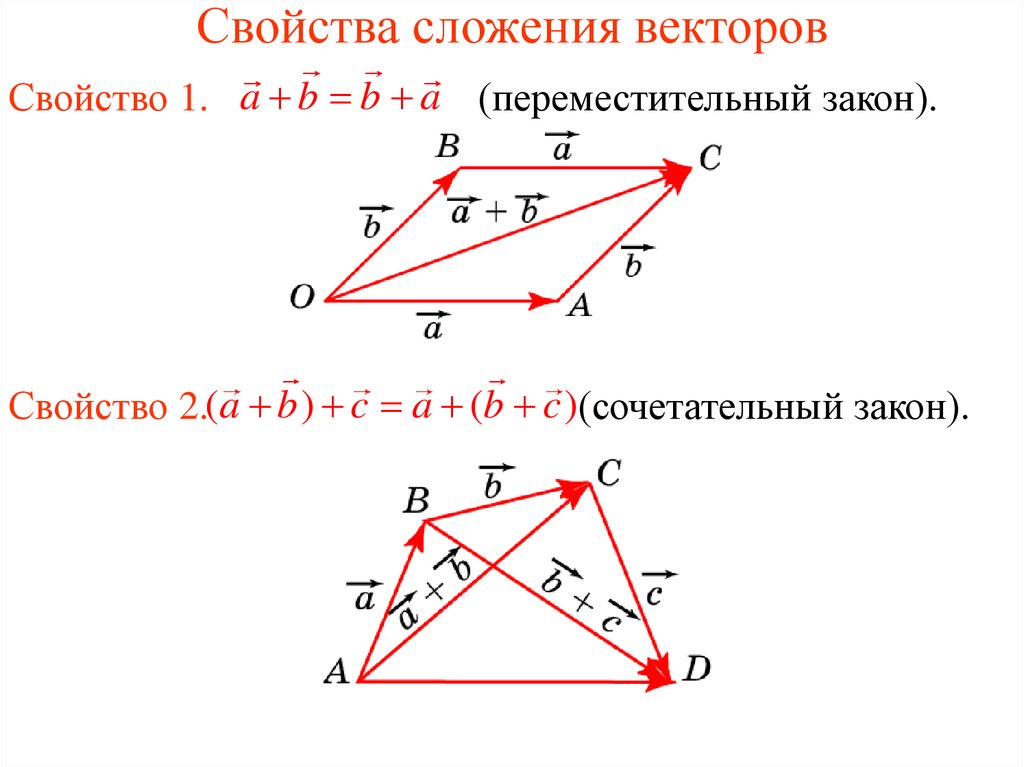 Точка пересечения трех плоскостей Точка пересечения трех плоскостей§ 135. Взаимное расположение плоскости и пары точек § 136. Расстояние от точки до плоскости § 138. Нормальное уравнение плоскости § 139. Приведение уравнения плоскости к нормальному виду § 140. Уравнения прямой в пространстве § 141. Условие, при котором два уравнения первой степени представляют прямую § 142. Пересечение прямой с плоскостью § 143. Направляющий вектор § 144. Углы между прямой и осями координат § 145. Угол между двумя прямыми § 146. Угол между прямой и плоскостью § 147. Условия параллельности и перпендикулярности прямой и плоскости § 148. Пучок плоскостей § 149. Проекции прямой на координатные плоскости § 150. Симметричные уравнения прямой § 151. Приведение уравнений прямой к симметричному виду § 153. Пересечение плоскости с прямой, заданной параметрически § 154. Уравнения прямой, проходящей через две данные точки § 155. 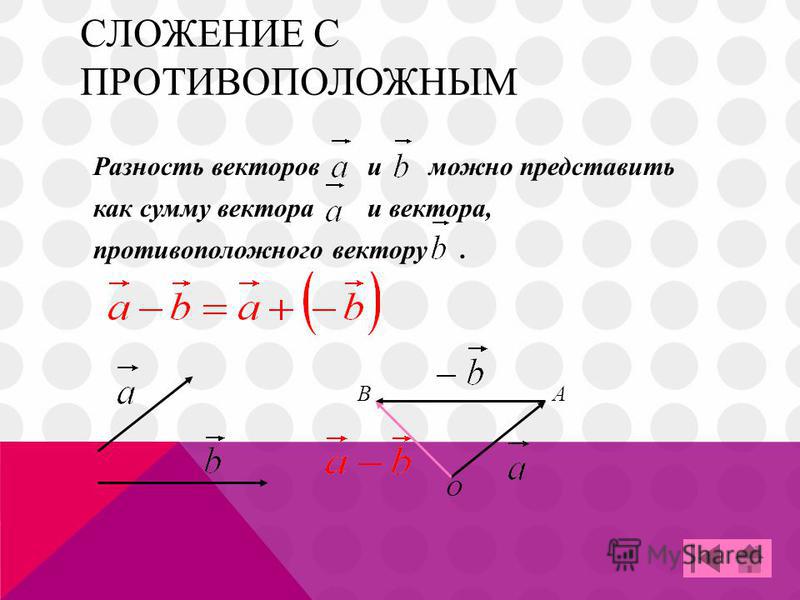 Уравнение плоскости, проходящей через данную точку перпендикулярно данной прямой Уравнение плоскости, проходящей через данную точку перпендикулярно данной прямой§ 156. Уравнения прямой, проходящей через данную точку перпендикулярно данной плоскости § 157. Уравнение плоскости, проходящей через данную точку и данную прямую § 158. Уравнение плоскости, проходящей через данную точку и параллельной двум данным прямым § 159. Уравнение плоскости, проходящей через данную прямую и параллельной другой данной прямой § 161. Уравнения перпендикуляра, опущенного из данной точки на данную прямую § 162. Длина перпендикуляра, опущенного из данной точки на данную прямую § 163. Условие, при котором две прямые пересекаются или лежат в одной плоскости § 164. Уравнения общего перпендикуляра к двум данным прямым § 165. Кратчайшее расстояние между двумя прямыми § 165а. Правые и левые пары прямых § 166. Преобразование координат § 167. Уравнение поверхности § 168. 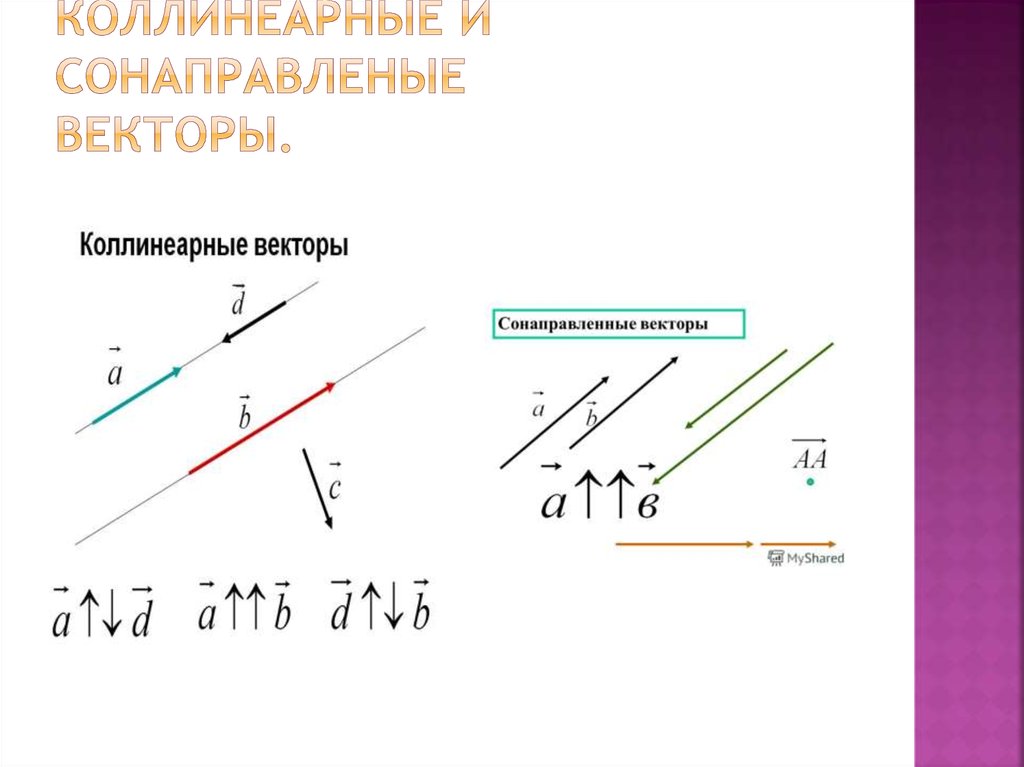 Цилиндрические поверхности, у которых образующие параллельны одной из осей координат Цилиндрические поверхности, у которых образующие параллельны одной из осей координат§ 170. Проекция линии на координатную плоскость § 171. Алгебраические поверхности и их порядок § 172. Сфера § 173. Эллипсоид § 174. Однополостный гиперболоид § 175. Двуполостный гиперболоид § 176. Конус второго порядка § 177. Эллиптический параболоид § 178. Гиперболический параболоид § 179. Перечень поверхностей второго порядка § 180. Прямолинейные образующие поверхностей второго порядка § 181. Поверхности вращения § 182. Определители второго и третьего порядков § 183. Определители высших порядков § 184. Свойства определителей § 185. Практический прием вычисления определителей § 187. Два уравнения с двумя неизвестными § 188. Два уравнения с двумя неизвестными § 189. Однородная система двух уравнений с тремя неизвестными § 190. 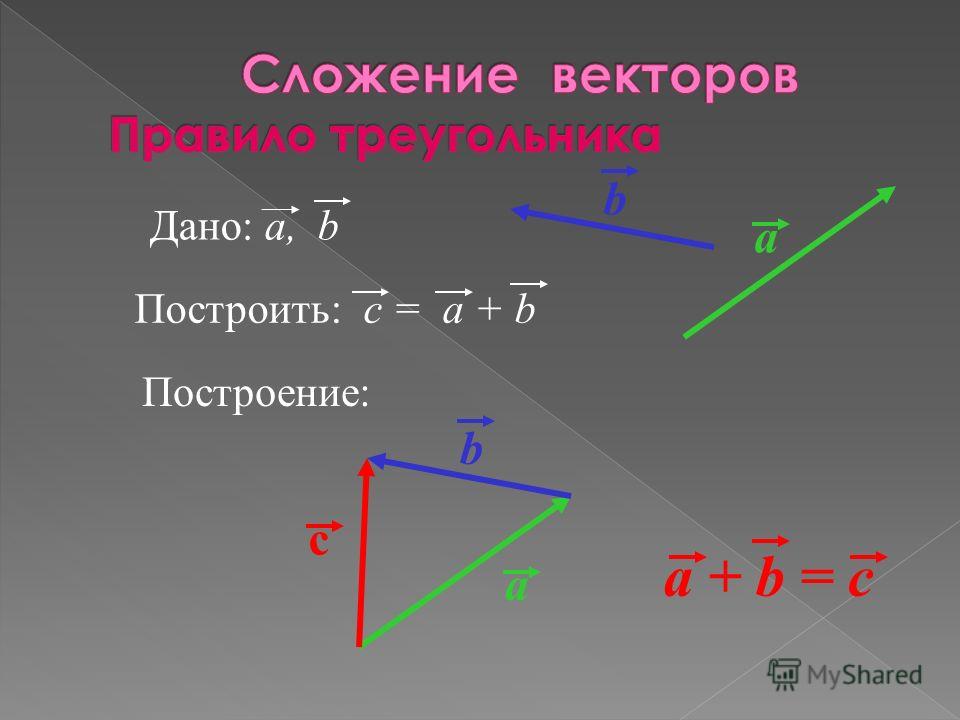 Два уравнения с двумя неизвестными Два уравнения с двумя неизвестными§ 190а. Система n уравнений с n неизвестными ОСНОВНЫЕ ПОНЯТИЯ МАТЕМАТИЧЕСКОГО АНАЛИЗА § 192. Рациональные числа § 193. Действительные (вещественные) числа § 194. Числовая ось § 195. Переменные и постоянные величины § 196. Функция § 197. Способы задания функции § 198. Область определения функции § 199. Промежуток § 200. Классификация функций § 201. Основные элементарные функции § 202. Обозначение функции § 203. Предел последовательности § 204. Предел функции § 205. Определение предела функции § 206. Предел постоянной величины § 207. Бесконечно малая величина § 208. Бесконечно большая величина § 209. Связь между бесконечно большими и бесконечно малыми величинами § 210. Ограниченные величины § 211. Расширение понятия предепа § 212. Основные свойства бесконечно малых величин § 213. Основные теоремы о пределах § 214. Число е § 215. Предел sinx/x при x стремящемся к 0 § 216. 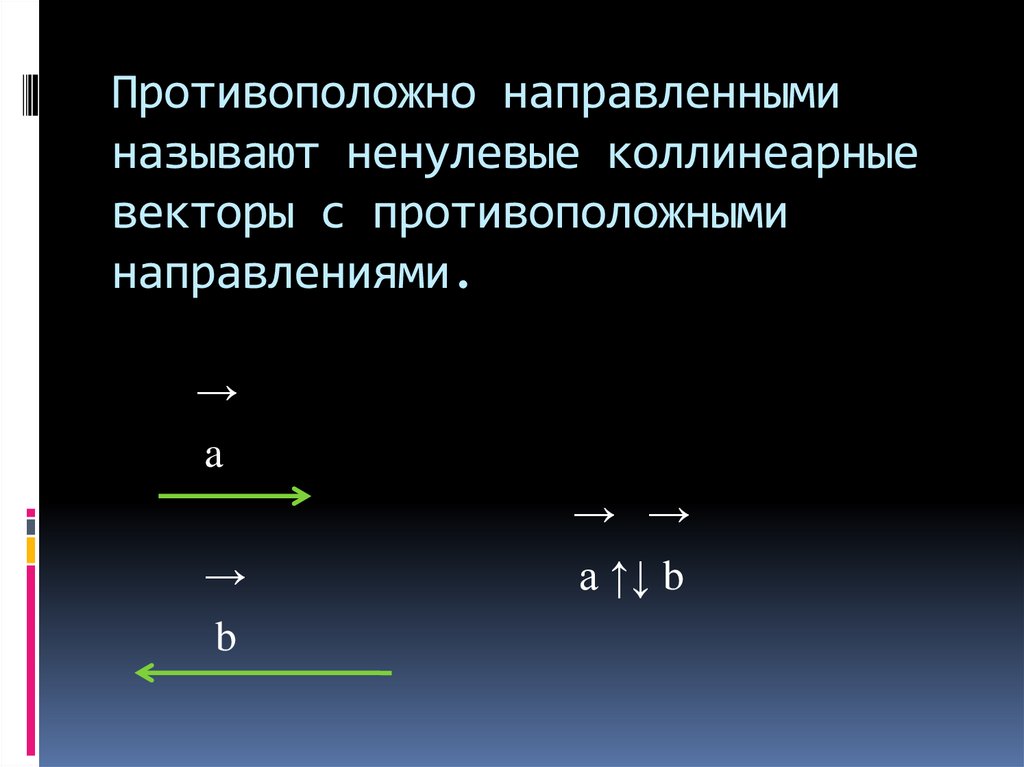 Эквивалентные бесконечно малые величины Эквивалентные бесконечно малые величины§ 217. Сравнение бесконечно малых величин § 217а. Приращение переменной величины § 218. Непрерывность функции в точке § 219. Свойства функций, непрерывных в точке § 219а. Односторонний предел; скачок функции § 220. Непрерывность функции на замкнутом промежутке § 221. Свойства функций, непрерывных на замкнутом промежутке ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ § 223. Скорость § 224. Определение производной функции § 225. Касательная § 226. Производные некоторых простейших функций § 227. Свойства производной § 228. Дифференциал § 229. Механический смысл дифференциала § 230. Геометрический смысл дифференциала § 231. Дифференцируемые функции § 232. Дифференциалы некоторых простейших функций § 233. Свойства дифференциала § 234. Инвариантность выражения f'(x)dx § 235. Выражение производной через дифференциалы § 236. Функция от функции (сложная функция) § 237. Дифференциал сложной функции § 238. 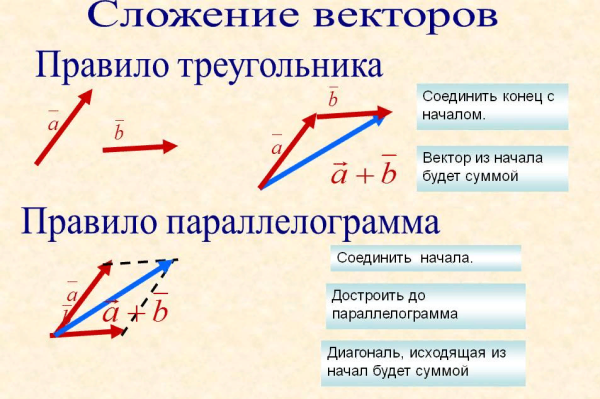 Производная сложной функции Производная сложной функции§ 239. Дифференцирование произведения § 240. Дифференцирование частного (дроби) § 241. Обратная функция § 242. Натуральные логарифмы § 243. Дифференцирование логарифмической функции § 244. Логарифмическое дифференцирование § 245. Дифференцирование показательной функции § 246. Дифференцирование тригонометрических функций § 247. Дифференцирование обратных тригонометрических функций § 247а. Некоторые поучительные примеры § 248. Дифференциал в приближенных вычислениях § 249. Применение дифференциала к оценке погрешности формул § 250. Дифференцирование неявных функций § 251. Параметрическое задание линии § 252. Параметрическое задание функции § 253. Циклоида § 254. Уравнение касательной к плоской линии § 254а. Касательные к кривым второго порядка § 255. Уравнение нормали § 256. Производные высших порядков § 257. Механический смысл второй производной § 258. Дифференциалы высших порядков § 259.  Выражение высших производных через дифференциалы Выражение высших производных через дифференциалы§ 260. Высшие производные функций, заданных параметрически § 261. Высшие производные неявных функций § 262. Правило Лейбница § 263. Теорема Ролля § 264. Теорема Лагранжа о среднем значении § 265. Формула конечных приращений § 266. Обобщенная теорема о среднем значении (Коши) § 267. Раскрытие неопределенности вида 0/0 § 268. Раскрытие неопределенности вида бесконесность на бесконечность § 269. Неопределенные выражения других видов § 270. Исторические сведения о формуле Тейлора § 271. Формула Тейлора § 272. Применение формулы Тейлора к вычислению значений функции § 273. Возрастание и убывание функции § 274. Признаки возрастания и убывания функции в точке § 274а. Признаки возрастания и убывания функции в промежутке § 275. Максимум и минимум § 276. Необходимое условие максимума и минимума § 277. Первое достаточное условие максимума и минимума § 278. Правило нахождения максимумов и минимумов § 279. 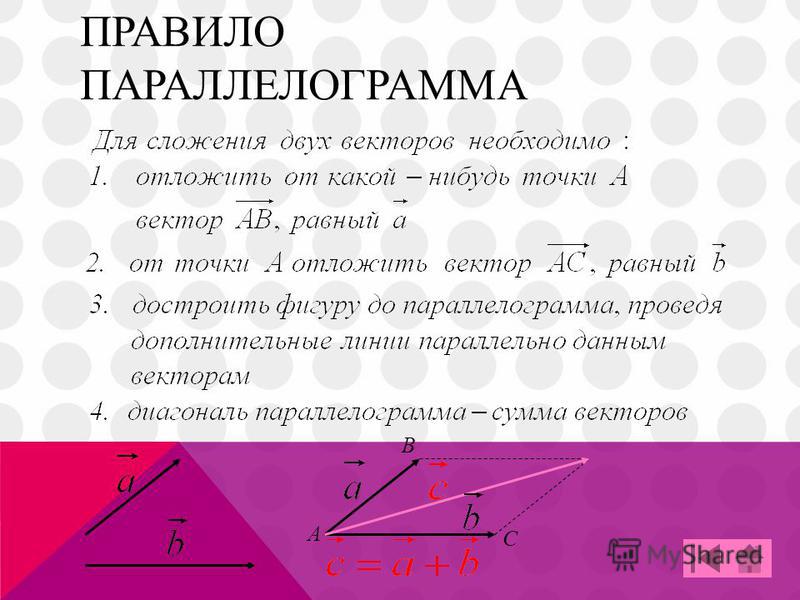 Второе достаточное условие максимума и минимума Второе достаточное условие максимума и минимума§ 280. Нахождение наибольшего и наименьшего значений функции § 281. Выпуклость плоских кривых; точка перегиба § 282. Сторона вогнутости § 283. Правило для нахождения точек перегиба § 284. Асимптоты § 285. Нахождение асимптот, параллельных координатным осям § 286. Нахождение асимптот, не параллельных оси ординат § 287. Приемы построения графиков § 288. Решение уравнений. Общие замечания § 289. Решение уравнений. Способ хорд § 290. Решение уравнений. Способ касательных § 291. Комбинированный метод хорд и касательных ИНТЕГРАЛЬНОЕ ИСЧИСЛЕНИЕ § 293. Первообразная функция § 294. Неопределенный интеграл § 295. Геометрический смысл интегрирования § 296. Вычисление постоянной интегрирования по начальным данным § 297. Свойства неопределенного интеграла § 298. Таблица интегралов § 299. Непосредственное интегрирование § 300. Способ подстановки (интегрирование через вспомогательную переменную) § 301. 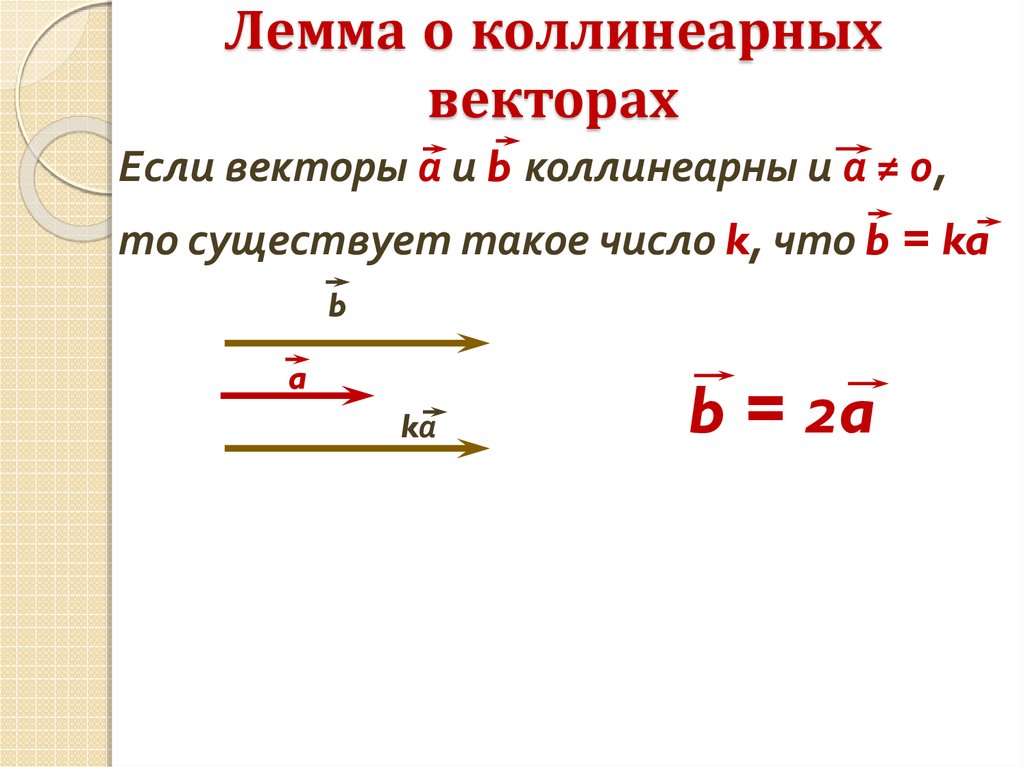 Интегрирование по частям Интегрирование по частям§ 302. Интегрирование некоторых тригонометрических выражений § 303. Тригонометрические подстановки § 304. Рациональные функции § 304а. Исключение целой части § 305. О приемах интегрирования рациональных дробей § 306. Интегрирование простейших рациональных дробей § 307. Интегрирование рациональных функций (общий метод) § 308. О разложении многочлена на множители § 309. Об интегрируемости в элементарных функциях § 310. Некоторые интегралы, зависящие от радикалов § 311. Интеграл от биномиального дифференциала § 312. Интегралы вида … § 313. Интегралы вида S R(sinx, cosx)dx § 314. Определенный интеграл § 315. Свойства определенного интеграла § 316. Геометрический смысл определенного интеграла § 317. Механический смысл определенного интеграла § 318. Оценка определенного интеграла § 318а. Неравенство Буняковского § 319. Теорема о среднем интегрального исчисления § 320. Определенный интеграл как функция верхнего предела § 321. 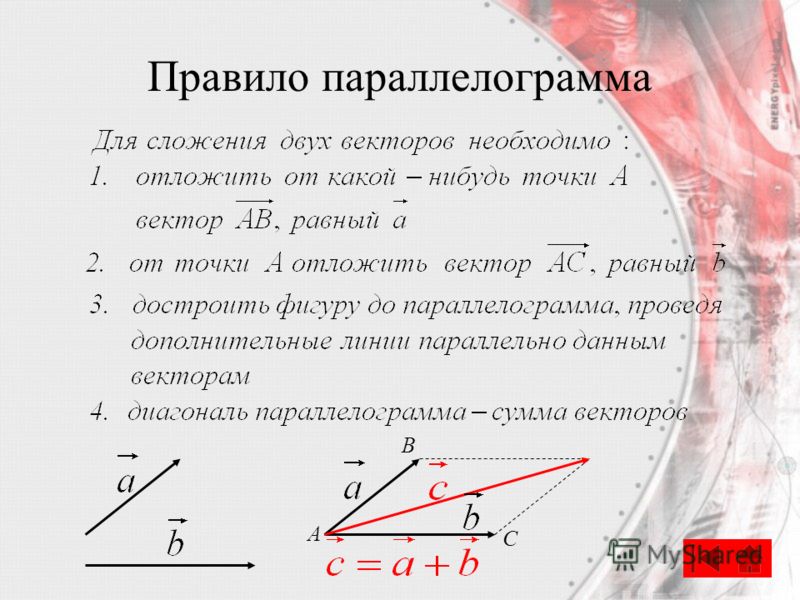 Дифференциал интеграла Дифференциал интеграла§ 322. Интеграл дифференциала. Формула Ньютона — Лейбница § 323. Вычисление определенного интеграла с помощью неопределенного § 324. Определенное интегрирование по частям § 325. Способ подстановки в определенном интеграле § 326. О несобственных интегралах § 327. Интегралы с бесконечными пределами § 328. Интеграл функции, имеющей разрыв § 329. О приближенном вычислении интеграла § 330. Формулы прямоугольников § 331. Формула трапеций § 332. Формула Симпсона (параболических трапеций) § 333. Площади фигур, отнесенных к прямоугольным координатам § 334. Схема применения определенного интеграла § 335. Площади фигур, отнесенных к полярным координатам § 336. Объем тела по поперечным сечениям § 337. Объем тела вращения § 338. Длина дуги плоской линии § 339. Дифференциал дуги § 340. Длина дуги и ее дифференциал в полярных координатах § 341. Площадь поверхности вращения ОСНОВНЫЕ СВЕДЕНИЯ О ПЛОСКИХ И ПРОСТРАНСТВЕННЫХ ЛИНИЯХ § 342.  Кривизна Кривизна§ 343. Центр, радиус и круг кривизны плоской линии § 344. Формулы для кривизны, радиуса и центра кривизны плоской линии § 345. Эволюта плоской линии § 346. Свойства эволюты плоской линии § 347. Развертка (эвольвента) плоской линии § 348. Параметрическое задание пространственной линии § 349. Винтовая линия § 350. Длина дуги пространственной линии § 351. Касательная к пространственной линии § 352. Нормальная плоскость § 353. Вектор-функция скалярного аргумента § 354. Предел вектор-функции § 355. Производная вектор-функции § 356. Дифференциал вектор-функции § 357. Свойства производной и дифференциала вектор-функции § 358. Соприкасающаяся плоскость § 359. Главная нормаль. Сопутствующий трехгранник § 360. Взаимное расположение линии и плоскости § 361. Основные векторы сопутствующего трехгранника § 362. Центр, ось и радиус кривизны пространственной линии § 363. Формулы для кривизны, радиуса и центра кривизны пространственной линии § 364. 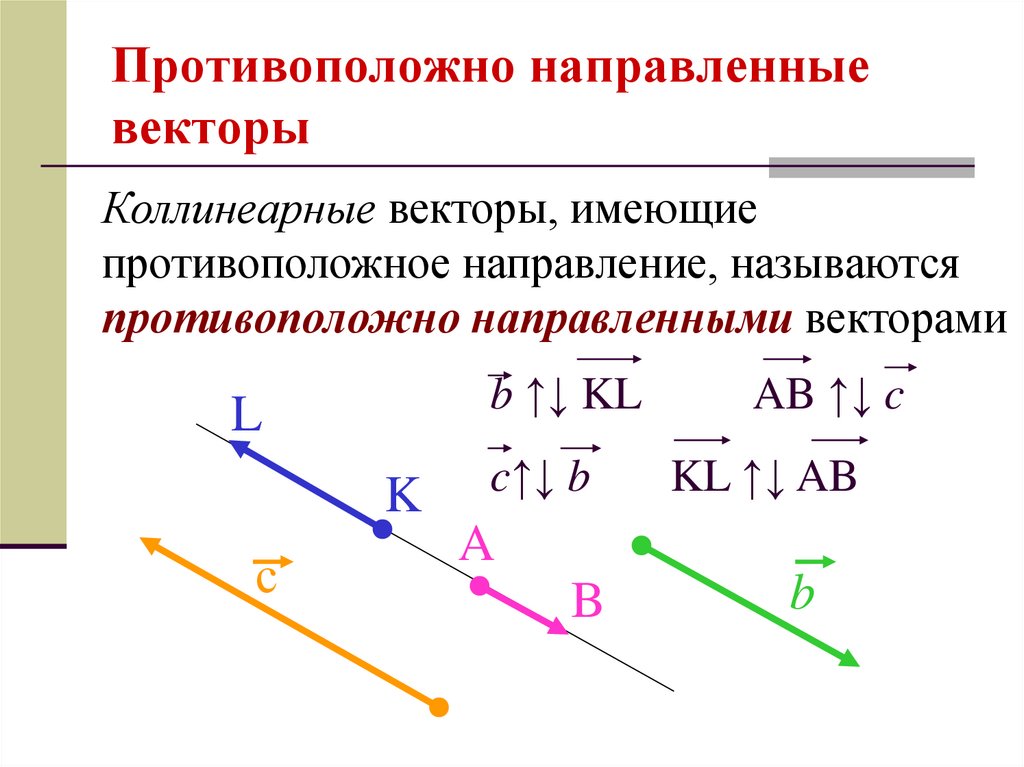 О знаке кривизны О знаке кривизны§ 365. Кручение РЯДЫ § 367. Определение ряда § 368. Сходящиеся и расходящиеся ряды § 369. Необходимое условие сходимости ряда § 370. Остаток ряда § 371. Простейшие действия над рядами § 372. Положительные ряды § 373. Сравнение положительных рядов § 374. Признак Даламбера для положительного ряда § 375. Интегральный признак сходимости § 376. Знакопеременный ряд. Признак Лейбница § 377. Абсолютная и условная сходимость § 378. Признак Даламбера для произвольного ряда § 379. Перестановка членов ряда § 380. Группировка членов ряда § 381. Умножение рядов § 382. Деление рядов § 383. Функциональный ряд § 384. Область сходимости функционального ряда § 385. О равномерной и неравномерной сходимости § 386. Определение равномерной и неравномерной сходимости § 387. Геометрический смысл равномерной и неравномерной сходимости § 388. Признак равномерной сходимости; правильные ряды § 389. Непрерывность суммы ряда § 390. 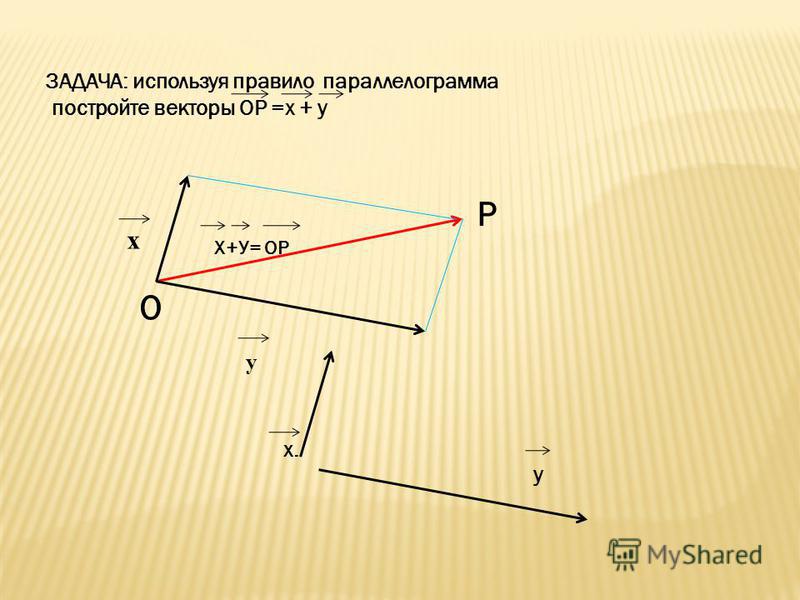 Интегрирование рядов Интегрирование рядов§ 391. Дифференцирование рядов § 392. Степенной ряд § 393. Промежуток и радиус сходимости степенного ряда § 394. Нахождение радиуса сходимости § 395. Область сходимости ряда, расположенного по степеням х – х0 § 396. Теорема Абеля § 397. Действия со степенными рядами § 398. Дифференцирование и интегрирование степенного ряда § 399. Ряд Тейлора § 400. Разложение функции в степенной ряд § 401. Разложение элементарных функций в степенные ряды § 402. Применение рядов к вычислению интегралов § 403. Гиперболические функции § 404. Обратные гиперболические функции § 405. Происхождение наименований гиперболических функций § 406. О комплексных числах § 407. Комплексная функция действительного аргумента § 408. Производная комплексной функции § 409. Возведение положительного числа в комплексную степень § 410. Формула Эйлера § 411. Тригонометрический ряд § 412. Исторические сведения о тригонометрических рядах § 413. 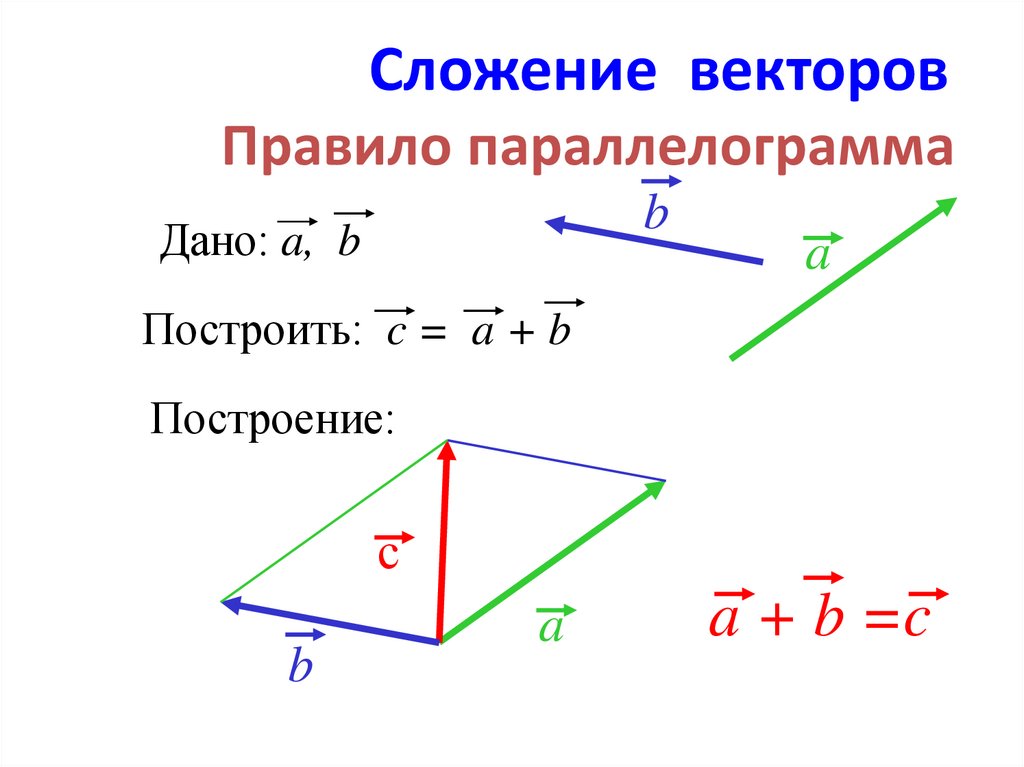 Ортогональность системы функций cos nx, sin nx Ортогональность системы функций cos nx, sin nx§ 414. Формулы Эйлера-Фурье § 415. Ряд Фурье § 416. Ряд Фурье для непрерывной функции § 417. Ряд Фурье для четной и нечетной функции § 418. Ряд Фурье для разрывной функции ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ АРГУМЕНТОВ § 420. Функция трех и большего числа аргументов § 421. Способы задания функций нескольких аргументов § 422. Предел функции нескольких аргументов § 424. Непрерывность функции нескольких аргументов § 425. Частные производные § 426. Геометрический смысл частных производных для случая двух аргументов § 427. Полное и частное приращения § 428. Частный дифференциал § 429. О выражении частной производной через дифференциал § 430. Полный дифференциал § 431. Геометрический смысл полного дифференциала (случай двух аргументов) § 432. Инвариантность выражения … полного дифференциала § 433. Техника дифференцирования § 434. Дифференцируемые функции § 435. 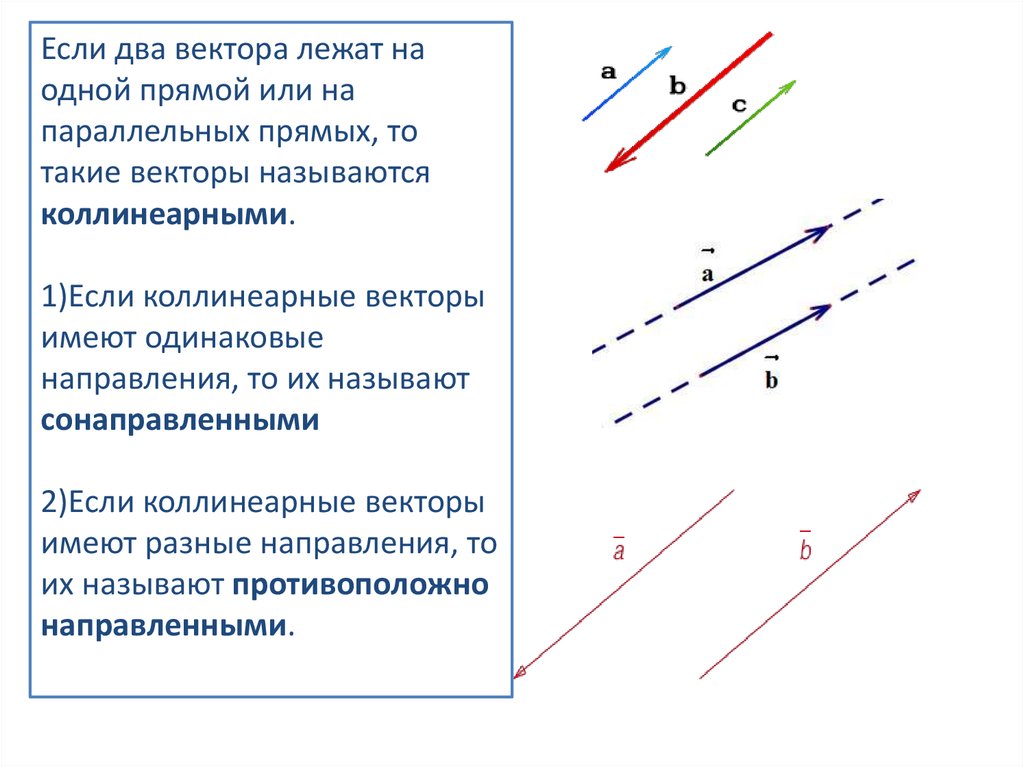 Касательная плоскость и нормаль к поверхности Касательная плоскость и нормаль к поверхности§ 436. Уравнение касательной плоскости § 437. Уравнения нормали § 438. Дифференцирование сложной функции § 439. Замена прямоугольных координат полярными § 440. Формулы для производных сложной функции § 441. Полная производная § 442. Дифференцирование неявной функции нескольких переменных § 443. Частные производные высших порядков § 444. Полные дифференциалы высших порядков § 445. Техника повторного дифференцирования § 446. Условное обозначение дифференциалов § 447. Формула Тейлора для функции нескольких аргументов § 448. Экстремум (максимум и минимум) функции нескольких аргументов § 449. Правило нахождения экстремума § 450. Достаточные условия экстремума (случай двух аргументов) § 451. Двойной интеграл § 452. Геометрический смысл двойного интеграла § 453. Свойства двойного интеграла § 454. Оценка двойного интеграла § 455. Вычисление двойного интеграла (простейший случай) § 456.  Вычисление двойного интеграла (общий случай) Вычисление двойного интеграла (общий случай)§ 457. Функция точки § 458. Выражение двойного интеграла через полярные координаты § 459. Площадь куска поверхности § 460. Тройной интеграл § 461. Вычисление тройного интеграла (простейший случай) § 462. Вычисление тройного интеграла (общий случай) § 463. Цилиндрические координаты § 464. Выражение тройного интеграла через цилиндрические координаты § 465. Сферические координаты § 466. Выражение тройного интеграла через сферические координаты § 467. Схема применения двойного и тройного интегралов § 468. Момент инерции § 471. Криволинейный интеграл § 472. Механический смысл криволинейного интеграла § 473. Вычисление криволинейного интеграла § 474. Формула Грина § 475. Условие, при котором криволинейный интеграл не зависит от пути § 476. Другая форма условия предыдущего параграфа ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 478. Уравнение первого порядка § 479. Геометрический смысл уравнения первого порядка § 480.  Изоклины Изоклины§ 481. Частное и общее решения уравнения первого порядка § 482. Уравнения с разделенными переменными § 483. Разделение переменных. Особое решение § 484. Уравнение в полных дифференциалах § 484а. Интегрирующий множитель § 485. Однородное уравнение § 486. Линейное уравнение первого порядка § 487. Уравнение Клеро § 488. Огибающая § 489. Об интегрируемости дифференциальных уравнений § 490. Приближенное интегрирование уравнений первого порядка по методу Эйлера § 491. Интегрирование дифференциальных уравнений с помощью рядов § 492. О составлении дифференциальных уравнений § 493. Уравнение второго порядка § 494. Уравнение n-го порядка § 495. Случаи понижения порядка § 496. Линейное уравнение второго порядка § 497. Линейное уравнение второго порядка с постоянными коэффициентами § 498. Линейное уравнение второго порядка с постоянными коэффициентами без правой части § 498а. Связь между случаями 1 и 3 § 498 § 499. 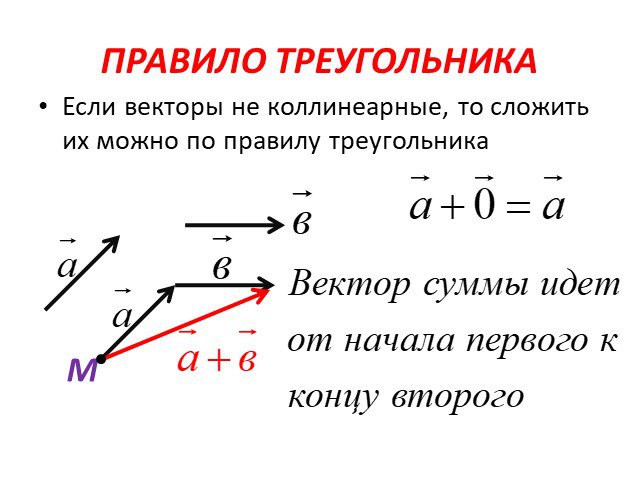 Линейное уравнение второго порядка с постоянными коэффициентами с правой частью Линейное уравнение второго порядка с постоянными коэффициентами с правой частью§ 500. Линейные уравнения любого порядка § 501. Метод вариации постоянных § 502. Системы дифференциальных уравнений. Линейные системы НЕКОТОРЫЕ ЗАМЕЧАТЕЛЬНЫЕ КРИВЫЕ § 503. Строфоида § 504. Циссоида Диокла § 505. Декартов лист § 506. Верзьера Аньези § 507. Конхоида Никомеда § 508. Улитка Паскаля; кардиоида § 509. Линия Кассини § 510. Лемниската Бернулли § 511. Архимедова спираль § 512. Эвольвента (развертка) круга § 513. Логарифмическая спираль § 514. Циклоиды § 515. Эпициклоиды и гипоциклоиды § 516. Трактриса § 517. Цепная линия |
Коллинеарные векторы и примеры
они коллинеарные векторы. Это один из трех существующих типов векторов. Речь идет о векторах, которые находятся в одном направлении или линии действия. Это означает следующее: два или более вектора будут линейными, если расположить их на прямой, параллельной друг другу.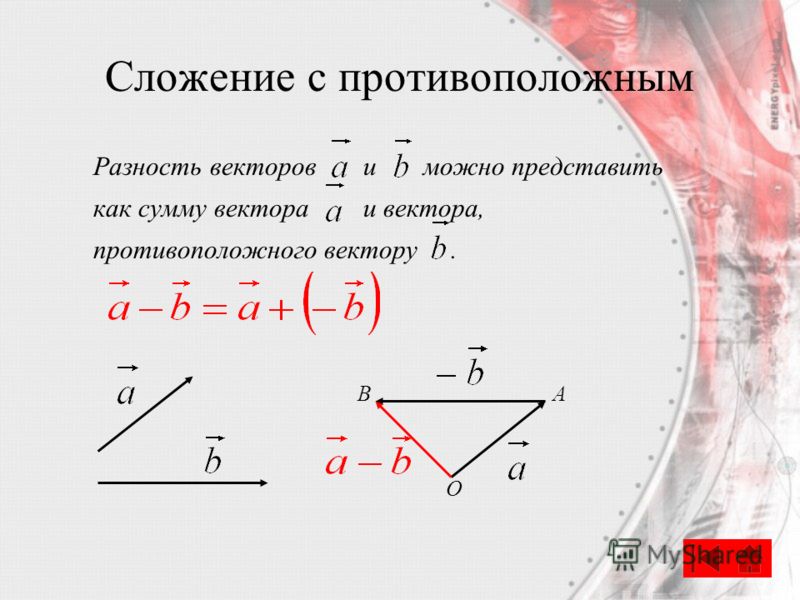
Вектор определяется как количество, применяемое к объекту, и характеризуется направлением, вкусом и масштабом. Векторы могут быть найдены на плоскостях или в пространстве и могут быть различных типов: коллинеарные векторы, параллельные векторы и параллельные векторы.
Индекс
- 1 вектор холина
- 2 Характеристики
- 2.1 Пример 1
- 2.2 Пример 2
- 2.3 Пример 1
- 3 многоуровневая векторная система
- 3.1 Коллинеарные векторы с противоположными направлениями
- 3.2 Коллинеарные векторы с одинаковым значением
- 3.3 Векторные коллекторы с одинаковой величиной и противоположными направлениями
- 4 Разница между коллинеарными и параллельными векторами
- 5 Каталожные номера
Вектор является линейным, если линия действия одного вектора точно совпадает с линией действия всех других векторов, независимо от размера и вкуса каждого вектора.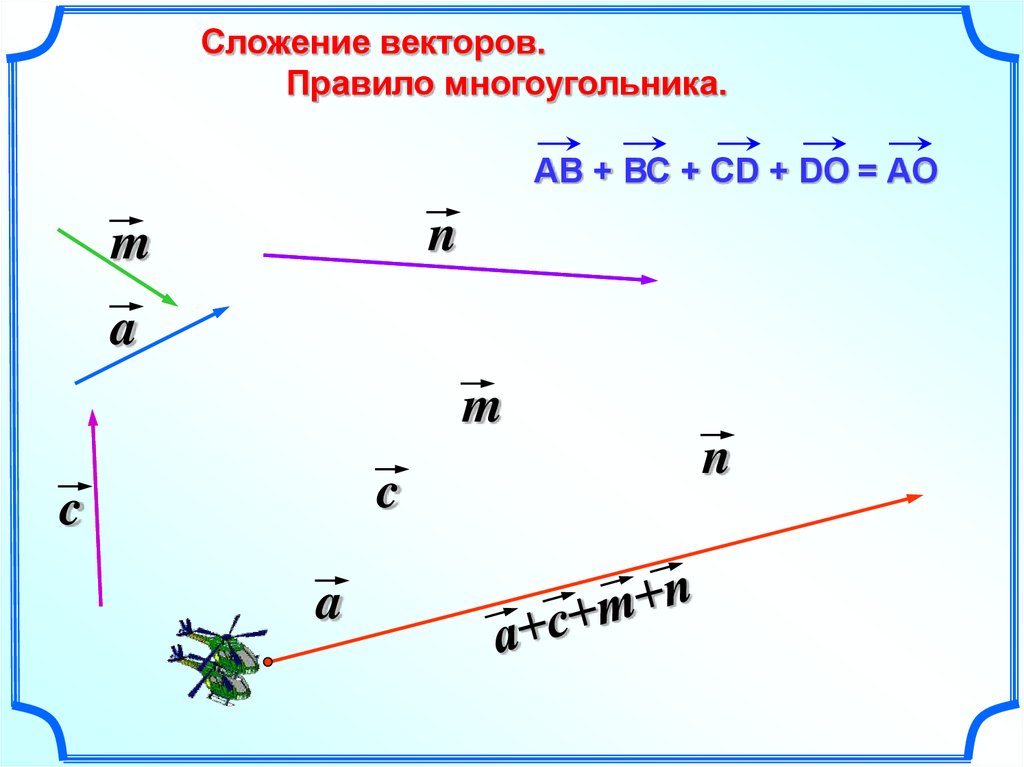
Векторы используются в качестве представлений в различных областях, таких как математика, физика, алгебра, а также в геометрии, где векторы коллинеарны только тогда, когда направления совпадают, независимо от того, что они означают.
Функция— Два или более вектора являются линейными, если отношения между координатами одинаковы.
Пример 1У нас есть вектор m = m_x; m_y и n = n_x; н_у. Это коллинеарно, если:
Пример 2– Два или более вектора являются линейными, если произведение или векторное произведение равно нулю (0). Это связано с тем, что в системе координат каждый вектор характеризуется своими координатами, и если они пропорциональны друг другу, векторы будут линейными. Это выражается следующим образом:
Пример 1 Имеем векторы a = (10, 5) и b = (6, 3). Для определения того, коллинеарны ли они, применяется определяющая теория, устанавливающая равенство перекрестных произведений. Таким образом, вы должны:
Таким образом, вы должны:
Коллинеарные векторы представлены графически с использованием направления и вкуса этого — учитывая, что они должны проходить через точку приложения и модуль, которые имеют определенный масштаб или длина.
Колинеарная векторная система образуется, когда два или более вектора воздействуют на объект или объекты, представляют собой силу и действуют в одном направлении.
Например, если к объектам приложены две коллинеарные силы, результат этого будет зависеть только от направления их действия. Возможны три случая, а именно:
Коллинеарный вектор с противоположными направлениямиРезультаты двух коллинеарных векторов равны этому числу:
R = Σ F = F 1 + F 2.
ПримерЕсли на поезд действуют две силы F 1 = 40 Н и F 2 = 20 Н в противоположном направлении (как показано на рисунке), результат составляет:
R = Σ F = (- 40 Н) + 20 Н.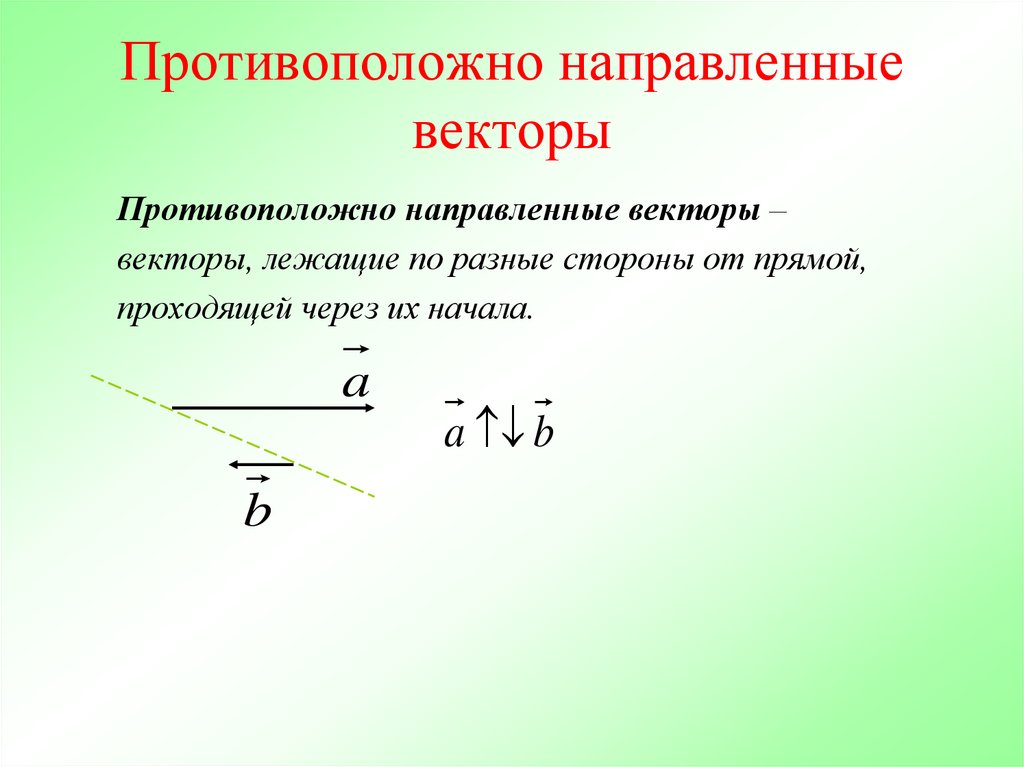
R = – 20 Н.
Коллинеарные векторы с одинаковым значениемВеличина равнодействующей силы будет равна сумме коллинеарных векторов:0102 + F 2.
ПримерЕсли на поезд действуют две силы F 1 = 35 Н и F 2 = 55 Н в одном и том же направлении (как показано на рисунке), результат составляет:
R = Σ F = 35 Н + 55 Н.
R = 90 Н.
Положительные результаты указывают на то, что коллинеарный вектор работает влево.
Спинальный вектор с той же величиной и противоположными направлениямиРезультат двух коллинеарных векторов будет таким же, как сумма коллинеарных векторов:
R = Σ F = F 1 + F 2.
Поскольку сила имеет одинаковую величину, но в противоположном направлении, то есть одна будет положительной, а другая отрицательной, при сложении двух сил результат будет нулевой.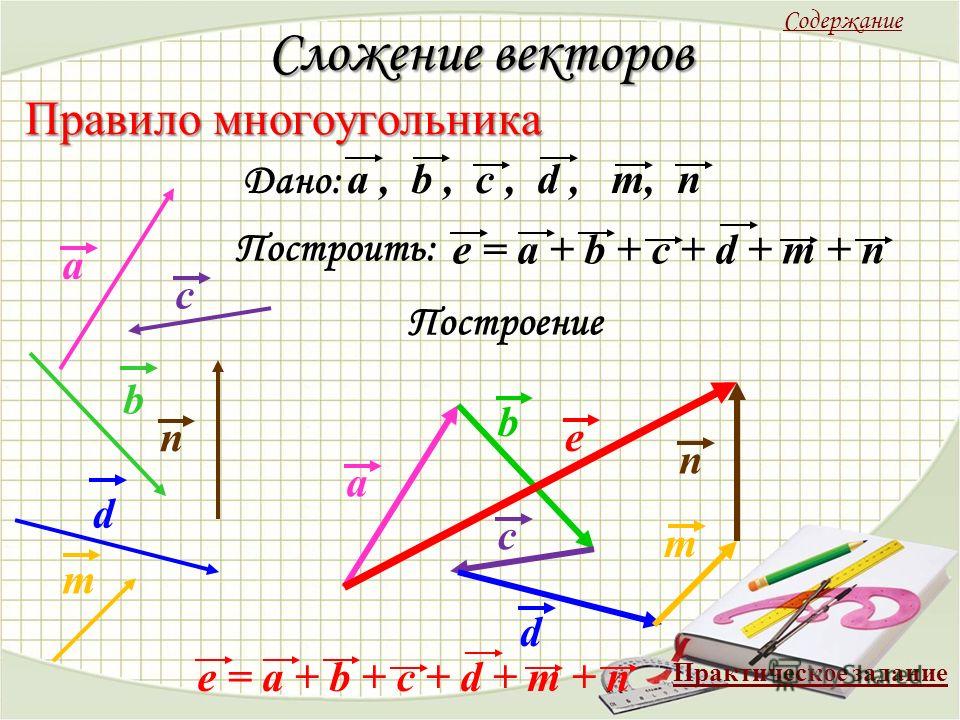
Если на поезд действуют две силы F 1 = -7 Н и F 2 = 7 Н, которые имеют одинаковую величину, но в противоположном направлении (как показано на рисунке), то результат:
R = Σ F = (-7 Н) + 7 Н.
R = 0.
Поскольку равнодействующая равна 0, это означает, что векторы уравновешены друг с другом и, следовательно, тело находится в равновесии или покоится (оно не будет двигаться).
Разница между коллинеарными и параллельными векторамиКоллинеарные векторы характеризуются тем, что они имеют одинаковое направление на одной линии или потому, что они параллельны этой линии; то есть они являются прямыми параллельными линейными векторами.
С другой стороны, параллельные векторы определяются, потому что они находятся на разных линиях действия, пересекающихся в одной точке.
Другими словами, они имеют одно и то же происхождение или прибытие – независимо от их модуля, направления или направления – образуя между собой угол.
Параллельные векторные системы решаются математическими или графическими методами, такими как метод параллелограмма силы и метод силы многоугольника. Благодаря этому будет определено результирующее значение вектора, указывающее направление, в котором будет двигаться тело.
Основное различие между коллинеарными векторами и параллельными векторами заключается в линии действия, в которой они действуют: коллинеарные действуют в одной и той же линии, будучи параллельными в разных.
То есть коллинеарные векторы действуют в одной плоскости, «X» или «Y»; и одновременные действия на обеих плоскостях, начиная с одной и той же точки.
Коллинеарные векторы не находятся в одной точке, как и одинаковые времена, потому что они параллельны друг другу.
На левом изображении вы видите блок. Связан веревкой и узлом, разделяющим ее на две части; при вытягивании в разные стороны и с разной силой блоки будут двигаться в одном направлении.
Представлены два вектора, совпадающие в точке (блоке), независимо от модуля, понимания или направления.
И наоборот, на правом рисунке показан шкив, который поднимает коробку. Веревка представляет линию действия; при рисовании на него действуют две силы (вектора): одна сила натяжения (при подъеме на блок) и другая, сила, оказывающая воздействие веса балки. Оба имеют одно и то же направление, но в противоположном направлении; не согласен в одном.
Номер по каталогуАбдулла Сэм
Я преподаватель, исследователь и писатель. Я пишу об учебных предметах, чтобы улучшить обучение студентов колледжей и университетов. Я пишу высококачественные учебные заметки, в основном, о технологиях, играх, образовании, а также о решениях / советах и хитростях. Я человек, который помогает студентам приобретать знания, компетентность или добродетель.Определение коллинеарных векторов.
Последняя обновленная дата: 09 -й февраля 2023
•
Общее представление: 246,3K
•
Просмотры сегодня: 3,37K
Ответ
Проверено
246,3K+ просмотры
Hint:
8. вспоминая определение коллинеарных векторов, что они располагаются на одной линии или параллельных линиях. Воспользуемся тем, что компоненты одного из коллинеарных векторов кратны другому вектору. Мы используем тот факт, что векторное произведение коллинеарного вектора равно нулю, чтобы доказать все условия о коллинеарных векторах.
вспоминая определение коллинеарных векторов, что они располагаются на одной линии или параллельных линиях. Воспользуемся тем, что компоненты одного из коллинеарных векторов кратны другому вектору. Мы используем тот факт, что векторное произведение коллинеарного вектора равно нулю, чтобы доказать все условия о коллинеарных векторах. Полный пошаговый ответ:
Коллинеарные векторы: — Векторы, параллельные одной или лежащие на одной прямой, называются коллинеарными векторами.
Условие коллинеарности: — Два вектора коллинеарны, если выполнено любое из этих условий.
Условие-1:- Два вектора a, b коллинеарны, если существует такое число, что приведенное ниже уравнение становится верным. $\bar{a}=n.\bar{b}$
Условие-2: Два вектора коллинеарны, если отношение их координат равно.
Это неверно, если один из компонентов равен нулю.
Условие-3: Два вектора коллинеарны, если их векторное произведение равно нулевому вектору.
Это действительно только в том случае, когда 2 вектора являются трехмерными (пространственными) векторами.
Перекрестное произведение:- Перекрестным произведением вектора а на вектор b называется вектор с, длина которого численно равна площади параллелограмма, построенного на векторах а, b, направление перпендикулярно плоскости векторов а, б. Если векторы a, b записать как $xi+yj+zk;\text{ pi+qj+rk}$, мы получим векторное произведение a, b, представленное $a\times b$, как:
$a\times b=\left|\begin{matrix}
&i &j &k \\
&x &y &z \\
&p &q &r \\
\end{matrix} \right|$
Применить это определение к условию -3 получаем:
Перекрестное произведение a, b равно 0. Из условия 1 получаем:
$a=nb$. Если $b=xi+yj+zk,$ мы получаем значение a as,
$a=nxi+nyj+nzk$.
Перемножение $a\times b$ записывается как:
$a\times b=\left| \begin{matrix}
&i &j &k \\
&nx &ny &nz \\
&x &y &z \\
\end{matrix} \right|$
Расширяя это, мы получаем следующее:
\[\begin{align}
& a\times b=\left( nzy-nzy \ right)i-\left( nxz-nxz \right)j+\left( nxy-nxy \right)k \\
& a\times b=oi-oj+ok\text{ = нулевой вектор}\text{.