
Синхронный усилитель — Википедия Переиздание // WIKI 2
Синхро́нный усили́тель — тип электронного усилителя, в котором применён принцип синхронного детектирования сигнала.
Позволяет обнаруживать периодические полезные сигналы с заранее известной частотой на фоне очень сильных помех, величина[1] которых может превосходить в десятки и сотни раз амплитуду полезного сигнала.
Выигрыш в разрешении сильно зашумлённого сигнала осуществляется за счёт сужения полосы частот, или, что то же самое — за счёт увеличения времени накопления.
Принцип действия
Применение синхронного усилителя в абсорбционном фотометре. Поток света через образец периодически прерывается обтюратором. Синхронно с прерываниями в синхронном усилителе открывается и закрывается ключ. Выход синхронного усилителя подключен к интегрирующему регистратору.
Главными элементами синхронного усилителя являются ключ и усреднитель сигнала. Ключ коммутируется с частотой принимаемого полезного периодического сигнала, а выход ключа подключён к какому-нибудь усреднителю сигнала, например, интегратору. При работе ключ передаёт на интегратор в каждом периоде только часть периода — время выборки, в остальное время периода ключ разомкнут. Так как сигнал помехи обычно некоррелирован с полезным сигналом, то во время выборки сигнал помехи имеет разные знаки и, будучи проинтегрирован за достаточно большое число выборок, даст небольшой относительно сигнала вклад в выходной сигнал интегратора, в то время как полезный сигнал во время каждой выборки имеет один и тот же знак и поэтому постепенно накапливается интегратором.
Допустим, что полезный сигнал синусоидальный с частотой ω {\displaystyle \omega } и амплитудой A {\displaystyle A} :
- U s ( t ) = A sin ( ω t ) , {\displaystyle U_{s}(t)=A\sin(\omega t),}
который аддитивно смешан (просуммирован) с сигналом шума с нулевым математическим ожиданием U n ( t ) {\displaystyle U_{n}(t)} , например, с гауссовским шумом, то есть сигнал, подаваемый на ключ имеет вид:
- U s n ( t ) = A sin ( ω t ) + U n ( t ) . {\displaystyle U_{s}n(t)=A\sin(\omega t)+U_{n}(t).}
Пусть ключ открывается в течение каждого 1-го полупериода сигнала, тогда выходной сигнал интегратора с нулевым начальным сигналом через достаточно длительное время, спустя n + 1 {\displaystyle n+1} периодов будет:
- U I ( t ) = ∫ 0 T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ∫ T T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ⋯ + ∫ n T n T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t = ; {\displaystyle U_{I}(t)=\int _{0}^{T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\int _{T}^{T+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\dots +\int _{nT}^{nT+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt={};}
- = ∫ 0 T / 2 A sin ( ω t ) d t + ∫ T T + T / 2 A sin ( ω t ) d t + ⋯ + ∫ n T n T + T / 2 A sin ( ω t ) d t + ; {\displaystyle {}=\int _{0}^{T/2}A\sin(\omega t)\,dt+\int _{T}^{T+T/2}A\sin(\omega t)\,dt+\dots +\int _{nT}^{nT+T/2}A\sin(\omega t)\,dt+{};}
- + ∫ 0 T / 2 U n ( t ) d t + ∫ T T + T / 2 U n ( t ) d t + ⋯ + ∫ n T n T + T / 2 U n ( t ) d t . {\displaystyle {}+\int _{0}^{T/2}U_{n}(t)\,dt+\int _{T}^{T+T/2}U_{n}(t)\,dt+\dots +\int _{nT}^{nT+T/2}U_{n}(t)\,dt.}
Сумма интегралов, где в подынтегральном выражении полезный сигнал будет равна ( n + 1 ) ⋅ A , {\displaystyle (n+1)\cdot A,} а сумма интегралов с шумовым сигналом близка к 0 — оценке математического ожидания гауссовского сигнала за время ( n + 1 ) ⋅ T / 2. {\displaystyle (n+1)\cdot T/2.}
Таким образом, описанный метод позволяет накапливать сигнал, причём отношение сигнала к шуму в результате обработки будет тем больше, чем длительнее время накопления.
В рассмотренном примере было принято, что времена выборки длятся первую половину периода (ключ открывается в течение первого полупериода). То есть, обработка произведена с априорным знанием частоты и фазы полезного сигнала. Во многих приложениях это априорное знание имеется. Но в некоторых случаях известна только частота сигнала, но неизвестна фаза. В этом случае можно накапливать результаты с помощью 2 ключей и двух интеграторов, причём фазы открытия ключей сдвинуты на четверть периода (π/2), что гарантирует по крайней мере в одном из каналов накопление результата. В этом случае амплитуда и фаза полезного сигнала могут быть получены вычислениями:
- A = U 0 2 + U π / 2 2 , {\displaystyle A={\sqrt {{U_{0}}^{2}+U_{\pi /2}^{2}}},}
и
- θ = arctan U 0 U π / 2 , {\displaystyle \theta =\arctan {\frac {U_{0}}{U_{\pi /2}}},}
- где U 0 {\displaystyle U_{0}} и U π / 2 {\displaystyle U_{\pi /2}} — выходные сигналы каналов.
Если априорно неизвестна также и частота полезного сигнала, то для её определения с целью применения синхронного детектирования применяют корреляционные статистические математические методы или спектральные, например, с помощью дискретного преобразования Фурье по выборкам сигнала или спектральные экспериментальные методы с помощью анализаторов спектра.
Описанный метод пригоден не только для обнаружения сигнала и определения его амплитуды, но и для определения формы периодического сигнала. Для определения формы ключ открывают в течение небольшого времени в периоде и задержку открытия ключа относительно начала периода постепенно изменяют, применяют так называемое «стробоскопическое осциллографирование».
Применение
Данный метод и приборы, основанные на методе применяются везде, где требуется обнаружение слабых сигналов и измерение их параметров на фоне сильных помех, в астрономии, геофизике, радиосвязи, навигации и др.
Примечания
- ↑ Среднеквадратическое напряжение.
Литература
- Хоровиц П., Хилл У. Искусство схемотехники: В 2 томах = The Art of Electronics (Cambridge University Press, 1980) / Пер. с англ. под ред. М. В. Гальперина; Переводчики: И. И. Короткевич, М. Б. Левин, В. Г. Микуцкий, Л. М. Наймарк, О. А. Соболева. — Изд. 3-е, стереотипное. — М.: Мир, 1986. — 50 000 экз.
 Эта страница в последний раз была отредактирована 16 мая 2020 в 17:33.
Эта страница в последний раз была отредактирована 16 мая 2020 в 17:33.Синхронный усилитель — Википедия. Что такое Синхронный усилитель
Синхро́нный усили́тель — тип электронного усилителя, в котором применён принцип синхронного детектирования сигнала.
Позволяет обнаруживать периодические полезные сигналы с заранее известной частотой на фоне очень сильных помех, величина[1] которых может превосходить в десятки и сотни раз амплитуду полезного сигнала.
Выигрыш в разрешение сильно зашумлённого сигнала осуществляется за счёт сужения полосы частот, или, что то же самое — за счёт увеличения времени накопления.
Принцип действия
Главными элементами синхронного усилителя являются ключ и усреднитель сигнала. Ключ коммутируется с частотой принимаемого полезного периодического сигнала, а выход ключа подключён к какому-нибудь усреднителю сигнала, например, интегратору. При работе ключ передаёт на интегратор в каждом периоде только часть периода — время выборки, в остальное время периода ключ разомкнут. Так как сигнал помехи обычно некоррелирован с полезным сигналом, то во время выборки сигнал помехи имеет разные знаки и, будучи проинтегрирован за достаточно большое число выборок, даст небольшой относительно сигнала вклад в выходной сигнал интегратора, в то время как полезный сигнал во время каждой выборки имеет один и тот же знак и поэтому постепенно накапливается интегратором.
Допустим, что полезный сигнал синусоидальный с частотой ω {\displaystyle \omega } и амплитудой A {\displaystyle A} :
- U s ( t ) = A sin ( ω t ) , {\displaystyle U_{s}(t)=A\sin(\omega t),}
который аддитивно смешан с сигналом шума с нулевым математическим ожиданием U n ( t ) {\displaystyle U_{n}(t)} , например, с гауссовским шумом, то есть сигнал, подаваемый на ключ имеет вид
- U s n ( t ) = A sin ( ω t ) + U n ( t ) . {\displaystyle U_{s}n(t)=A\sin(\omega t)+U_{n}(t).}
Пусть ключ открывается в течение каждого 1-го полупериода сигнала, тогда выходной сигнал интегратора с нулевым начальным сигналом через достаточно длительное время, спустя n + 1 {\displaystyle n+1} периодов будет
- U I ( t ) = ∫ 0 T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ∫ T T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ⋯ + ∫ n T n T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t = {\displaystyle U_{I}(t)=\int _{0}^{T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\int _{T}^{T+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\dots +\int _{nT}^{nT+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt={}}
- = ∫ 0 T / 2 A sin ( ω t ) d t + ∫ T T + T / 2 A sin ( ω t ) d t + ⋯ + ∫ n T n T + T / 2 A sin ( ω t ) d t + {\displaystyle {}=\int _{0}^{T/2}A\sin(\omega t)\,dt+\int _{T}^{T+T/2}A\sin(\omega t)\,dt+\dots +\int _{nT}^{nT+T/2}A\sin(\omega t)\,dt+{}}
- + ∫ 0 T / 2 U n ( t ) d t + ∫ T T + T / 2 U n ( t ) d t + ⋯ + ∫ n T n T + T / 2 U n ( t ) d t . {\displaystyle {}+\int _{0}^{T/2}U_{n}(t)\,dt+\int _{T}^{T+T/2}U_{n}(t)\,dt+\dots +\int _{nT}^{nT+T/2}U_{n}(t)\,dt.}
Сумма интегралов, где в подынтегральном выражении полезный сигнал будет равна ( n + 1 ) ⋅ A , {\displaystyle (n+1)\cdot A,} а сумма интегралов с шумовым сигналом близка к 0 — оценке математического ожидания гауссовского сигнала за время ( n + 1 ) ⋅ T / 2. {\displaystyle (n+1)\cdot T/2.}
Таким образом, описанный метод позволяет накапливать сигнал, причём отношение сигнала к шуму в результате обработки будет тем больше, чем длительнее время накопления.
В рассмотренном примере было принято, что времена выборки длятся первую половину периода (ключ открывается в течение первого полупериода). То есть, обработка произведена с априорным знанием частоты и фазы полезного сигнала. Во многих приложениях это априорное знание имеется. Но может быть, что известна только частота сигнала, но неизвестна фаза. В этом случае можно накапливать результаты с помощью 2 ключей и двух интеграторов, причём фазы открытия ключей сдвинуты на четверть периода (π/2), что гарантирует по крайней мере в одном из каналов накопление результата. В этом случае амплитуда и фаза полезного сигнала могут быть получены вычислениями:
- A = U 0 2 + U π / 2 2 , {\displaystyle A={\sqrt {{U_{0}}^{2}+U_{\pi /2}^{2}}},}
и
- θ = arctan U 0 U π / 2 , {\displaystyle \theta =\arctan {\frac {U_{0}}{U_{\pi /2}}},}
где U 0 {\displaystyle U_{0}} и U π / 2 {\displaystyle U_{\pi /2}} — выходные сигналы каналов.
Если априорно неизвестна частота полезного сигнала, то для её определения с целью применения синхронного детектирования применяют корреляционные статистические математические методы или спектральные, например, с помощью дискретного преобразования Фурье по выборкам сигнала или спектральные экспериментальные методы с помощью анализаторов спектра.
Описанный метод пригоден не только для обнаружения сигнала и определения его амплитуды, но и для определения формы периодического сигнала. Для определения формы ключ открывают в течение небольшого времени в периоде и задержку открытия ключа относительно начала периода постепенно изменяют, применяют так называемое «стробоскопическое осциллографирование».
Применение
Данный метод и приборы, основанные на методе применяются везде, где требуется обнаружение слабых сигналов и измерение их параметров на фоне сильных помех, в астрономии, геофизике, радиосвязи, навигации и др.
Примечания
- ↑ Среднеквадратическое напряжение.
Литература
- Хоровиц П., Хилл У. Искусство схемотехники: В 2 томах = The Art of Electronics (Cambridge University Press, 1980) / Пер. с англ. под ред. М. В. Гальперина; Переводчики: И. И. Короткевич, М. Б. Левин, В. Г. Микуцкий, Л. М. Наймарк, О. А. Соболева. — Изд. 3-е, стереотипное. — М.: Мир, 1986. — 50 000 экз.
Синхронный усилитель — Википедия
Синхро́нный усили́тель — тип электронного усилителя, в котором применён принцип синхронного детектирования сигнала.
Позволяет обнаруживать периодические полезные сигналы с заранее известной частотой на фоне очень сильных помех, величина[1] которых может превосходить в десятки и сотни раз амплитуду полезного сигнала.
Выигрыш в разрешение сильно зашумлённого сигнала осуществляется за счёт сужения полосы частот, или, что то же самое — за счёт увеличения времени накопления.
Принцип действия
Главными элементами синхронного усилителя являются ключ и усреднитель сигнала. Ключ коммутируется с частотой принимаемого полезного периодического сигнала, а выход ключа подключён к какому-нибудь усреднителю сигнала, например, интегратору. При работе ключ передаёт на интегратор в каждом периоде только часть периода — время выборки, в остальное время периода ключ разомкнут. Так как сигнал помехи обычно некоррелирован с полезным сигналом, то во время выборки сигнал помехи имеет разные знаки и, будучи проинтегрирован за достаточно большое число выборок, даст небольшой относительно сигнала вклад в выходной сигнал интегратора, в то время как полезный сигнал во время каждой выборки имеет один и тот же знак и поэтому постепенно накапливается интегратором.
Допустим, что полезный сигнал синусоидальный с частотой ω {\displaystyle \omega } и амплитудой A {\displaystyle A} :
- U s ( t ) = A sin ( ω t ) , {\displaystyle U_{s}(t)=A\sin(\omega t),}
который аддитивно смешан с сигналом шума с нулевым математическим ожиданием U n ( t ) {\displaystyle U_{n}(t)} , например, с гауссовским шумом, то есть сигнал, подаваемый на ключ имеет вид
- U s n ( t ) = A sin ( ω t ) + U n ( t ) . {\displaystyle U_{s}n(t)=A\sin(\omega t)+U_{n}(t).}
Пусть ключ открывается в течение каждого 1-го полупериода сигнала, тогда выходной сигнал интегратора с нулевым начальным сигналом через достаточно длительное время, спустя n + 1 {\displaystyle n+1} периодов будет
- U I ( t ) = ∫ 0 T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ∫ T T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ⋯ + ∫ n T n T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t = {\displaystyle U_{I}(t)=\int _{0}^{T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\int _{T}^{T+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\dots +\int _{nT}^{nT+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt={}}
- = ∫ 0 T / 2 A sin ( ω t ) d t + ∫ T T + T / 2 A sin ( ω t ) d t + ⋯ + ∫ n T n T + T / 2 A sin ( ω t ) d t + {\displaystyle {}=\int _{0}^{T/2}A\sin(\omega t)\,dt+\int _{T}^{T+T/2}A\sin(\omega t)\,dt+\dots +\int _{nT}^{nT+T/2}A\sin(\omega t)\,dt+{}}
- + ∫ 0 T / 2 U n ( t ) d t + ∫ T T + T / 2 U n ( t ) d t + ⋯ + ∫ n T n T + T / 2 U n ( t ) d t . {\displaystyle {}+\int _{0}^{T/2}U_{n}(t)\,dt+\int _{T}^{T+T/2}U_{n}(t)\,dt+\dots +\int _{nT}^{nT+T/2}U_{n}(t)\,dt.}
Сумма интегралов, где в подынтегральном выражении полезный сигнал будет равна ( n + 1 ) ⋅ A , {\displaystyle (n+1)\cdot A,} а сумма интегралов с шумовым сигналом близка к 0 — оценке математического ожидания гауссовского сигнала за время ( n + 1 ) ⋅ T / 2. {\displaystyle (n+1)\cdot T/2.}
Таким образом, описанный метод позволяет накапливать сигнал, причём отношение сигнала к шуму в результате обработки будет тем больше, чем длительнее время накопления.
В рассмотренном примере было принято, что времена выборки длятся первую половину периода (ключ открывается в течение первого полупериода). То есть, обработка произведена с априорным знанием частоты и фазы полезного сигнала. Во многих приложениях это априорное знание имеется. Но может быть, что известна только частота сигнала, но неизвестна фаза. В этом случае можно накапливать результаты с помощью 2 ключей и двух интеграторов, причём фазы открытия ключей сдвинуты на четверть периода (π/2), что гарантирует по крайней мере в одном из каналов накопление результата. В этом случае амплитуда и фаза полезного сигнала могут быть получены вычислениями:
- A = U 0 2 + U π / 2 2 , {\displaystyle A={\sqrt {{U_{0}}^{2}+U_{\pi /2}^{2}}},}
и
- θ = arctan U 0 U π / 2 , {\displaystyle \theta =\arctan {\frac {U_{0}}{U_{\pi /2}}},}
где U 0 {\displaystyle U_{0}} и U π / 2 {\displaystyle U_{\pi /2}} — выходные сигналы каналов.
Если априорно неизвестна частота полезного сигнала, то для её определения с целью применения синхронного детектирования применяют корреляционные статистические математические методы или спектральные, например, с помощью дискретного преобразования Фурье по выборкам сигнала или спектральные экспериментальные методы с помощью анализаторов спектра.
Описанный метод пригоден не только для обнаружения сигнала и определения его амплитуды, но и для определения формы периодического сигнала. Для определения формы ключ открывают в течение небольшого времени в периоде и задержку открытия ключа относительно начала периода постепенно изменяют, применяют так называемое «стробоскопическое осциллографирование».
Применение
Данный метод и приборы, основанные на методе применяются везде, где требуется обнаружение слабых сигналов и измерение их параметров на фоне сильных помех, в астрономии, геофизике, радиосвязи, навигации и др.
Примечания
- ↑ Среднеквадратическое напряжение.
Литература
- Хоровиц П., Хилл У. Искусство схемотехники: В 2 томах = The Art of Electronics (Cambridge University Press, 1980) / Пер. с англ. под ред. М. В. Гальперина; Переводчики: И. И. Короткевич, М. Б. Левин, В. Г. Микуцкий, Л. М. Наймарк, О. А. Соболева. — Изд. 3-е, стереотипное. — М.: Мир, 1986. — 50 000 экз.
Синхронный усилитель — Википедия
Синхро́нный усили́тель — тип электронного усилителя, в котором применён принцип синхронного детектирования сигнала.
Позволяет обнаруживать периодические полезные сигналы с заранее известной частотой на фоне очень сильных помех, величина[1] которых может превосходить в десятки и сотни раз амплитуду полезного сигнала.
Выигрыш в разрешение сильно зашумлённого сигнала осуществляется за счёт сужения полосы частот, или, что то же самое — за счёт увеличения времени накопления.
Принцип действия
Главными элементами синхронного усилителя являются ключ и усреднитель сигнала. Ключ коммутируется с частотой принимаемого полезного периодического сигнала, а выход ключа подключён к какому-нибудь усреднителю сигнала, например, интегратору. При работе ключ передаёт на интегратор в каждом периоде только часть периода — время выборки, в остальное время периода ключ разомкнут. Так как сигнал помехи обычно некоррелирован с полезным сигналом, то во время выборки сигнал помехи имеет разные знаки и, будучи проинтегрирован за достаточно большое число выборок, даст небольшой относительно сигнала вклад в выходной сигнал интегратора, в то время как полезный сигнал во время каждой выборки имеет один и тот же знак и поэтому постепенно накапливается интегратором.
Допустим, что полезный сигнал синусоидальный с частотой ω {\displaystyle \omega } и амплитудой A {\displaystyle A} :
- U s ( t ) = A sin ( ω t ) , {\displaystyle U_{s}(t)=A\sin(\omega t),}
который аддитивно смешан с сигналом шума с нулевым математическим ожиданием U n ( t ) {\displaystyle U_{n}(t)} , например, с гауссовским шумом, то есть сигнал, подаваемый на ключ имеет вид
- U s n ( t ) = A sin ( ω t ) + U n ( t ) . {\displaystyle U_{s}n(t)=A\sin(\omega t)+U_{n}(t).}
Пусть ключ открывается в течение каждого 1-го полупериода сигнала, тогда выходной сигнал интегратора с нулевым начальным сигналом через достаточно длительное время, спустя n + 1 {\displaystyle n+1} периодов будет
- U I ( t ) = ∫ 0 T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ∫ T T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ⋯ + ∫ n T n T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t = {\displaystyle U_{I}(t)=\int _{0}^{T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\int _{T}^{T+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\dots +\int _{nT}^{nT+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt={}}
- = ∫ 0 T / 2 A sin ( ω t ) d t + ∫ T T + T / 2 A sin ( ω t ) d t + ⋯ + ∫ n T n T + T / 2 A sin ( ω t ) d t + {\displaystyle {}=\int _{0}^{T/2}A\sin(\omega t)\,dt+\int _{T}^{T+T/2}A\sin(\omega t)\,dt+\dots +\int _{nT}^{nT+T/2}A\sin(\omega t)\,dt+{}}
- + ∫ 0 T / 2 U n ( t ) d t + ∫ T T + T / 2 U n ( t ) d t + ⋯ + ∫ n T n T + T / 2 U n ( t ) d t . {\displaystyle {}+\int _{0}^{T/2}U_{n}(t)\,dt+\int _{T}^{T+T/2}U_{n}(t)\,dt+\dots +\int _{nT}^{nT+T/2}U_{n}(t)\,dt.}
Сумма интегралов, где в подынтегральном выражении полезный сигнал будет равна ( n + 1 ) ⋅ A , {\displaystyle (n+1)\cdot A,} а сумма интегралов с шумовым сигналом близка к 0 — оценке математического ожидания гауссовского сигнала за время ( n + 1 ) ⋅ T / 2. {\displaystyle (n+1)\cdot T/2.}
Таким образом, описанный метод позволяет накапливать сигнал, причём отношение сигнала к шуму в результате обработки будет тем больше, чем длительнее время накопления.
В рассмотренном примере было принято, что времена выборки длятся первую половину периода (ключ открывается в течение первого полупериода). То есть, обработка произведена с априорным знанием частоты и фазы полезного сигнала. Во многих приложениях это априорное знание имеется. Но может быть, что известна только частота сигнала, но неизвестна фаза. В этом случае можно накапливать результаты с помощью 2 ключей и двух интеграторов, причём фазы открытия ключей сдвинуты на четверть периода (π/2), что гарантирует по крайней мере в одном из каналов накопление результата. В этом случае амплитуда и фаза полезного сигнала могут быть получены вычислениями:
- A = U 0 2 + U π / 2 2 , {\displaystyle A={\sqrt {{U_{0}}^{2}+U_{\pi /2}^{2}}},}
и
- θ = arctan U 0 U π / 2 , {\displaystyle \theta =\arctan {\frac {U_{0}}{U_{\pi /2}}},}
где U 0 {\displaystyle U_{0}} и U π / 2 {\displaystyle U_{\pi /2}} — выходные сигналы каналов.
Если априорно неизвестна частота полезного сигнала, то для её определения с целью применения синхронного детектирования применяют корреляционные статистические математические методы или спектральные, например, с помощью дискретного преобразования Фурье по выборкам сигнала или спектральные экспериментальные методы с помощью анализаторов спектра.
Описанный метод пригоден не только для обнаружения сигнала и определения его амплитуды, но и для определения формы периодического сигнала. Для определения формы ключ открывают в течение небольшого времени в периоде и задержку открытия ключа относительно начала периода постепенно изменяют, применяют так называемое «стробоскопическое осциллографирование».
Применение
Данный метод и приборы, основанные на методе применяются везде, где требуется обнаружение слабых сигналов и измерение их параметров на фоне сильных помех, в астрономии, геофизике, радиосвязи, навигации и др.
Примечания
- ↑ Среднеквадратическое напряжение.
Литература
- Хоровиц П., Хилл У. Искусство схемотехники: В 2 томах = The Art of Electronics (Cambridge University Press, 1980) / Пер. с англ. под ред. М. В. Гальперина; Переводчики: И. И. Короткевич, М. Б. Левин, В. Г. Микуцкий, Л. М. Наймарк, О. А. Соболева. — Изд. 3-е, стереотипное. — М.: Мир, 1986. — 50 000 экз.
Синхронный усилитель — Википедия. Что такое Синхронный усилитель
Синхро́нный усили́тель — тип электронного усилителя, в котором применён принцип синхронного детектирования сигнала.
Позволяет обнаруживать периодические полезные сигналы с заранее известной частотой на фоне очень сильных помех, величина[1] которых может превосходить в десятки и сотни раз амплитуду полезного сигнала.
Выигрыш в разрешение сильно зашумлённого сигнала осуществляется за счёт сужения полосы частот, или, что то же самое — за счёт увеличения времени накопления.
Принцип действия
Главными элементами синхронного усилителя являются ключ и усреднитель сигнала. Ключ коммутируется с частотой принимаемого полезного периодического сигнала, а выход ключа подключён к какому-нибудь усреднителю сигнала, например, интегратору. При работе ключ передаёт на интегратор в каждом периоде только часть периода — время выборки, в остальное время периода ключ разомкнут. Так как сигнал помехи обычно некоррелирован с полезным сигналом, то во время выборки сигнал помехи имеет разные знаки и, будучи проинтегрирован за достаточно большое число выборок, даст небольшой относительно сигнала вклад в выходной сигнал интегратора, в то время как полезный сигнал во время каждой выборки имеет один и тот же знак и поэтому постепенно накапливается интегратором.
Допустим, что полезный сигнал синусоидальный с частотой ω {\displaystyle \omega } и амплитудой A {\displaystyle A} :
- U s ( t ) = A sin ( ω t ) , {\displaystyle U_{s}(t)=A\sin(\omega t),}
который аддитивно смешан с сигналом шума с нулевым математическим ожиданием U n ( t ) {\displaystyle U_{n}(t)} , например, с гауссовским шумом, то есть сигнал, подаваемый на ключ имеет вид
- U s n ( t ) = A sin ( ω t ) + U n ( t ) . {\displaystyle U_{s}n(t)=A\sin(\omega t)+U_{n}(t).}
Пусть ключ открывается в течение каждого 1-го полупериода сигнала, тогда выходной сигнал интегратора с нулевым начальным сигналом через достаточно длительное время, спустя n + 1 {\displaystyle n+1} периодов будет
- U I ( t ) = ∫ 0 T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ∫ T T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t + ⋯ + ∫ n T n T + T / 2 [ A sin ( ω t ) + U n ( t ) ] d t = {\displaystyle U_{I}(t)=\int _{0}^{T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\int _{T}^{T+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt+\dots +\int _{nT}^{nT+T/2}[A\sin(\omega t)+U_{n}(t)]\,dt={}}
- = ∫ 0 T / 2 A sin ( ω t ) d t + ∫ T T + T / 2 A sin ( ω t ) d t + ⋯ + ∫ n T n T + T / 2 A sin ( ω t ) d t + {\displaystyle {}=\int _{0}^{T/2}A\sin(\omega t)\,dt+\int _{T}^{T+T/2}A\sin(\omega t)\,dt+\dots +\int _{nT}^{nT+T/2}A\sin(\omega t)\,dt+{}}
- + ∫ 0 T / 2 U n ( t ) d t + ∫ T T + T / 2 U n ( t ) d t + ⋯ + ∫ n T n T + T / 2 U n ( t ) d t . {\displaystyle {}+\int _{0}^{T/2}U_{n}(t)\,dt+\int _{T}^{T+T/2}U_{n}(t)\,dt+\dots +\int _{nT}^{nT+T/2}U_{n}(t)\,dt.}
Сумма интегралов, где в подынтегральном выражении полезный сигнал будет равна ( n + 1 ) ⋅ A , {\displaystyle (n+1)\cdot A,} а сумма интегралов с шумовым сигналом близка к 0 — оценке математического ожидания гауссовского сигнала за время ( n + 1 ) ⋅ T / 2. {\displaystyle (n+1)\cdot T/2.}
Таким образом, описанный метод позволяет накапливать сигнал, причём отношение сигнала к шуму в результате обработки будет тем больше, чем длительнее время накопления.
В рассмотренном примере было принято, что времена выборки длятся первую половину периода (ключ открывается в течение первого полупериода). То есть, обработка произведена с априорным знанием частоты и фазы полезного сигнала. Во многих приложениях это априорное знание имеется. Но может быть, что известна только частота сигнала, но неизвестна фаза. В этом случае можно накапливать результаты с помощью 2 ключей и двух интеграторов, причём фазы открытия ключей сдвинуты на четверть периода (π/2), что гарантирует по крайней мере в одном из каналов накопление результата. В этом случае амплитуда и фаза полезного сигнала могут быть получены вычислениями:
- A = U 0 2 + U π / 2 2 , {\displaystyle A={\sqrt {{U_{0}}^{2}+U_{\pi /2}^{2}}},}
и
- θ = arctan U 0 U π / 2 , {\displaystyle \theta =\arctan {\frac {U_{0}}{U_{\pi /2}}},}
где U 0 {\displaystyle U_{0}} и U π / 2 {\displaystyle U_{\pi /2}} — выходные сигналы каналов.
Если априорно неизвестна частота полезного сигнала, то для её определения с целью применения синхронного детектирования применяют корреляционные статистические математические методы или спектральные, например, с помощью дискретного преобразования Фурье по выборкам сигнала или спектральные экспериментальные методы с помощью анализаторов спектра.
Описанный метод пригоден не только для обнаружения сигнала и определения его амплитуды, но и для определения формы периодического сигнала. Для определения формы ключ открывают в течение небольшого времени в периоде и задержку открытия ключа относительно начала периода постепенно изменяют, применяют так называемое «стробоскопическое осциллографирование».
Применение
Данный метод и приборы, основанные на методе применяются везде, где требуется обнаружение слабых сигналов и измерение их параметров на фоне сильных помех, в астрономии, геофизике, радиосвязи, навигации и др.
Примечания
- ↑ Среднеквадратическое напряжение.
Литература
- Хоровиц П., Хилл У. Искусство схемотехники: В 2 томах = The Art of Electronics (Cambridge University Press, 1980) / Пер. с англ. под ред. М. В. Гальперина; Переводчики: И. И. Короткевич, М. Б. Левин, В. Г. Микуцкий, Л. М. Наймарк, О. А. Соболева. — Изд. 3-е, стереотипное. — М.: Мир, 1986. — 50 000 экз.
Синхронный усилитель — Карта знаний
- Синхро́нный усили́тель — тип электронного усилителя, в котором применён принцип синхронного детектирования сигнала.
Позволяет обнаруживать периодические полезные сигналы с заранее известной частотой на фоне очень сильных помех, величина которых может превосходить в десятки и сотни раз амплитуду полезного сигнала.
Выигрыш в разрешение сильно зашумлённого сигнала осуществляется за счёт сужения полосы частот, или, что то же самое — за счёт увеличения времени накопления.
Источник: Википедия
Связанные понятия
Сигнал — материальное воплощение сообщения для использования при передаче, переработке и хранении информации.Сигна́л — код (символ, знак), созданный и переданный в пространство (по каналу связи) одной системой, либо возникший в процессе взаимодействия нескольких систем. Смысл и значение сигнала проявляются после регистрации и интерпретации в принимающей системе. Фа́зовая манипуля́ция (ФМн, англ. phase-shift keying (PSK)) — один из видов фазовой модуляции, при которой фаза несущего колебания меняется скачкообразно в зависимости от информационного сообщения. Амплиту́дно-часто́тная характери́стика (АЧХ) — зависимость амплитуды выходного сигнала некоторой системы от частоты её входного гармонического сигнала. Иногда эту характеристику называют «частотным откликом системы» (frequency response). Согласованный фильтр — линейный оптимальный фильтр, построенный исходя из известных спектральных характеристик полезного сигнала и шума. Согласованные фильтры предназначены для выделения сигналов известной формы на фоне шумов. Под оптимальностью понимается максимальное отношение сигнал/шум на выходе фильтра, при этом форма сигнала при прохождении через фильтр изменяется. Адаптивный фильтр — система с линейным фильтром, имеющим передаточную функцию, контролируемую переменными параметрами и средствами для установки этих параметров согласно оптимизационному алгоритму. Ввиду сложности оптимизационных алгоритмов почти все адаптивные фильтры являются цифровыми фильтрами. Адаптивные фильтры требуются для некоторых приложений, поскольку некоторые параметры желательной операции обработки (например, местоположение отражающих поверхностей в реверберирующем пространстве) заранее… Оптимальны́й приём сигна́лов — область радиотехники, в которой обработка принимаемых сигналов осуществляется на основе методов математической статистики. Многолучево́е распростране́ние — это эффект, наблюдаемый при распространении сигналов. Возникает при условии существования в точке приема радиосигнала не только прямого, но и ещё одного или целого ряда отражённых или\и преломлённых лучей. Другими словами, на антенну приёмника приходят не только прямые лучи (непосредственно от самого источника), но и отражённые (от земной поверхности, зданий, строений и прочих объектов). Сигнальное созвездие (англ. constellation diagram) — представление всевозможных значений комплексной амплитуды манипулированных радиосигналов на комплексной плоскости. Цифровой вычислительный синтезатор (ЦВС), известный еще как схема прямого цифрового синтеза (DDS) — электронный прибор, предназначенный для синтеза сигналов произвольной формы и частоты из единственной опорной частоты, поставляемой генератором тактовых импульсов. Характерной особенностью ЦВС является то, что отсчеты синтезируемого сигнала вычисляются цифровыми методами, после чего передаются на цифро-аналоговый преобразователь (ЦАП), где и происходит их преобразование в аналоговую форму (напряжение… Морфинг (англ. morphing — трансформация) — звуковой эффект, заключающийся в наложении характеристик одного звука на другой. В качестве характеристик могут выступать огибающая, спектр или временная структура сигнала. Часто говорят о тембральном морфинге — процессе комбинирования двух или более звуков различного тембра для получения нового звука, тембр которого включает в себя отдельные характеристики обоих звуков. Существуют два класса систем связи: цифровые и аналоговые. Цифровой сигнал — это сигнал, имеющий конечное число дискретных уровней. Аналоговые сигналы являются непрерывными. Типичным примером такого сигнала является речевой сигнал, передаваемый по обычному телефону. Информацию, передаваемую аналоговыми сигналами, также необходимо защищать, в том числе и криптографическими методами.Синхронный усилитель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Синхронный усилитель
Cтраница 1
Синхронный усилитель состоит из узкополосного усилителя, синхронного детектора и блока формирования опорного напряжения, который преобразует синусоидальное опорное напряжение модуляционного генератора в напряжение прямоугольной формы. Для обеспечения линейности системы детектирования ЯМР перед синхронным усилителем включены калибровочные делители напряжения. [1]
Самым обычным корреляционным фильтром является синхронный усилитель или синхронный по фазе детектор. Опорный импульс WR ( T), получаемый из m ( t), является сигналом мощности ( разд. Это упрощает схему модуляции, поскольку умножение импульсом прямоугольной формы достигается простым переключением знака усиления синхронно с прямоугольным импульсом. Для того чтобы подавить входную постоянную составляющую ( см. разд. [2]
Соответствующее изменение отраженного света регистрируется синхронно с модуляцией частоты с помощью синхронного усилителя. [4]
При наличии постоянного поля, перпендикулярного или параллельного возбуждающему полю, с помощью аппаратуры для снятия петель гистерезиса, при соответствующем усилении сигнала съемной катушки ( используя, например, синхронный усилитель), можно также исследовать начальную восприимчивость, разд. [6]
На рис. 1.7, а показана блок-схема установки для проведения измерений по данному методу. Синхронный усилитель периодически, в режиме импульсного напряжения смещения, включает измеритель вольт-фарадных характеристик. Если в обедненной области образца, содержащего р — n — переход или барьер Шоттки, имеются глубокие примесные уровни, то при помощи синхронного усилителя обнаруживается переходный процесс, характеризующийся экспоненциальным изменением емкости. Амплитуда измеряемого сигнала пропорциональна концентрации примесей на глубоких уровнях, а постоянная времени переходного процесса зависит от вероятности опустошения ловушек в результате термоэмиссии. На рис. 1.7 6 схематически изображены синхронизирующий сигнал и сигнал, поступающий на вход синхронного усилителя. Измерения проводятся на фиксированной частоте при температуре образца, изменяющейся от температуры жидкого азота ( 77 К) до комнатной и выше. При определенной температуре, когда скорость опустошения ловушек соответствующим образом согласуется с частотой измерений, амплитуда сигнала достигает максимального значения, которое пропорционально плотности ловушек. Таким образом, измерение температурной зависимости сигнала позволяет идентифицировать ловушки, обусловливающие переходный процесс. [7]
Эти генераторы представляют собой в целом синхронный усилитель с индуктивно-емкостной связью и работают в режиме захватывания. Захватывание определяется таким состоянием генератора, когда приходящий на него сигнал, если он близок по частоте к частоте генератора, синхронизирует его колебания, заставляя генератор работать с частотой приходящего сигнала. [8]
За балансным смесителем включены маломощный предварительный усилитель и главный усилитель, имеющие центральную частоту 30 Мгц и полосу 8 Мгц. Детектированное напряжение промежуточной частоты подается на особо стабильный синхронный усилитель частоты 30 гц с большим коэффициентом усиления; выходное напряжение поступает на самописец. [9]
Синхронный усилитель состоит из узкополосного усилителя, синхронного детектора и блока формирования опорного напряжения, который преобразует синусоидальное опорное напряжение модуляционного генератора в напряжение прямоугольной формы. Для обеспечения линейности системы детектирования ЯМР перед синхронным усилителем включены калибровочные делители напряжения.
Синхронный генератор переменного тока: принцип работы, типы
Синхронный генератор — это машина, вырабатывающая переменное напряжение при вращении вала. Синхронный генератор называется синхронным, потому что генерируемая им форма волны напряжения синхронизируется с вращением генератора.
Основы работы с синхронным генератором
Синхронный генератор — это генератор переменного тока, выход которого синхронизирован с положением ротора.
Частота напряжения, создаваемого синхронным генератором, зависит только от скорости вращения его вала и количества полюсов . Это делает синхронный генератор очень эффективным для выработки электроэнергии для коммунальных предприятий, поскольку он вырабатывает энергию на сетевой частоте на постоянной основе, когда его ротор вращается с постоянной скоростью.

Рис. 1 КОЛЬЦА И УГЛЕРОДНЫЕ ЩЕТКИ:
Контактные кольца — это гладкие кольца, которые устанавливаются на ротор и соединяются с одним концом катушки ротора.
Щетки скользят непосредственно по контактным кольцам и обеспечивают электрический контакт с внешними клеммами.Щетки со временем изнашиваются, поэтому их необходимо периодически проверять и заменять по мере необходимости.
Для больших синхронных генераторов требуется напряжение возбуждения для поля. Это напряжение поступает от отдельного источника питания, такого как небольшой вспомогательный генератор постоянного тока, называемый возбудителем, для подачи тока возбуждения.
Обычно возбудитель устанавливается на главном валу. Различные типы возбудителей включают отдельные возбудители, которые представляют собой генераторы постоянного тока, статические возбудители (без вращающихся частей) и возбудители постоянного тока с приводом от вала.Ток от возбудителя обычно регулируется автоматическим или ручным регулятором.
Вы встретите двух типов синхронных генераторов переменного тока , когда вы работаете с системами возобновляемой энергии.
В один тип , якорь является ротором, и ток от якоря генерируется в роторе; это называется генератором переменного тока с вращающимся якорем . В этом случае контактные кольца и щетки используются для пропускания тока от ротора через изолированные фарфоровые втулки к электрическим выводам на корпусе генератора.
, другой тип , имеет поле на роторе и якорь на статоре. В этом случае контактные кольца и щетки могут не понадобиться, поскольку мощность вырабатывается в неподвижном статоре, а ток ротора может подаваться от отдельного вращающегося возбудителя, установленного на том же валу. Это называется генератором переменного тока с вращающимся полем .
В любом случае вал ротора соединен с первичным двигателем, который заставляет его вращаться.
В больших генераторах поле вращается, и обмотки якоря находятся на статоре.Трехфазный генератор является стандартом для коммунальных служб, поскольку его можно передавать по более низкой цене, а трехфазный генератор значительно меньше однофазного генератора того же номинала.
Электрическая частота трехфазного выходного напряжения зависит от механической скорости ротора и количества полюсов в генераторе, как упоминалось ранее.
Работа синхронного генератора переменного тока с вращающимся якорем
Генератор с вращающимся якорем также называется генератором стационарного поля .В небольшом генераторе с вращающимся якорем магнитное поле может создаваться постоянными магнитами, окружающими ротор, или электромагнитами.
Поскольку якорь находится во вращающемся узле, токосъемные кольца и щетки используются для отвода тока от ротора и его передачи на выход.
В дополнение к сотням обмоток, практичный генератор с вращающимся якорем обычно имеет много пар полюсов в статоре, которые чередуются как северный и южный полюса по периферии.
Противоположные полюса расположены рядом друг с другом, так что ротор генерирует полную синусоидальную волну, проходя через каждую пару полюсов.
Когда первичный двигатель вращает ротор, обмотки якоря отсекают силовые линии магнитного поля от поля и генерируют синусоидальную волну.
Полюса обмотки возбуждения являются частью магнитного пути; путь включает ротор, воздушный зазор, полюса статора и кожух, но не нижнюю пластину.
Нижняя пластина изготовлена из немагнитного материала для устранения наведенного тока. Обмотки возбуждения намотаны на полюса.
Однофазный генератор имеет два контактных кольца, которые соединены с катушкой на роторе.
Генераторы переменного тока с вращающимся якорем обычно используются в маломощных приложениях, обычно менее 5 кВА, поскольку ток через контактные кольца и щетки низкий. Большинство генераторов с вращающимся якорем производят только однофазные.
переменного тока с вращающимся полем Синхронный Рабочий генератор
Все большие синхронные генераторы переменного тока — это генераторы с вращающимся полем , которые повсеместно используются коммунальными предприятиями. Генератор переменного тока с вращающимся полем также называют генератором стационарного якоря.
Поскольку обмотки якоря находятся на статоре, можно легко генерировать большие количества энергии и передавать их в нагрузку или в сеть (между якорем и выходными клеммами нет подвижных контактов).
В очень маленьких генераторах переменного тока с вращающимся полем постоянные магниты могут использоваться для поля ротора; однако в большинстве генераторов вращающегося поля для ротора используется электромагнит (он известен как ротор с намоткой).
Ротор с обмоткой — это сердечник ротора, обмотка которого состоит из отдельных изолированных проводов.
В генераторе постоянный ток подается на ротор, чтобы обеспечить магнитный поток для вращающегося поля. Поскольку обеспечивается постоянный ток, электромагнит имеет фиксированную полярность (как стержневой магнит). Когда вращающееся магнитное поле проходит через обмотки статора, магнитное поле от ротора прорезает обмотки якоря в статоре, и вырабатывается энергия.
Коммунальные предприятия особенно озабочены эффективностью своих генераторов. По мере увеличения размеров генераторы повышается их эффективность.
Большая машина на самом деле весит меньше на киловатт произведенного, чем малая машина, и с повышением эффективности, с точки зрения коммунальной компании, чем больше, тем лучше.
Единственный недостаток заключается в том, что для больших генераторов требуется какое-либо охлаждение. Используются три основные системы охлаждения: воздушное охлаждение, охлаждение сжатым водородом и системы водяного / масляного охлаждения.
Требуемая система охлаждения зависит от конкретного типа генератора и выходной мощности. Например, большие низкооборотные многополюсные генераторы легче охлаждать, чем высокоскоростные.
В генераторе переменного тока с вращающимся полем ток в обмотке возбуждения обычно создается возбудителем.
Как упоминалось ранее, доступны несколько различных типов возбудителей, но обычно якорь возбудителя и главный полевой ротор перемещаются вместе на общем валу.
Возбудителем может быть генератор постоянного тока или генератор переменного тока, который использует диоды для преобразования своего выхода в постоянный ток. Конечный результат — это необходимый постоянный ток, который используется для создания поля ротора.
На рис. 2 показана схема генератора переменного тока с большим вращающимся полем . Он имеет генератор возбуждения постоянного тока на левом конце ротора и вращающееся поле в главном генераторе.
Якорь главного генератора состоит из витков проволоки, прижатой к полюсам статора. Эти катушки соединены в виде трех отдельных обмоток, расположенных на расстоянии 120 ° друг от друга, для создания трехфазного (3φ) напряжения.
Ток во вращающемся поле управляется возбудителем, который, в свою очередь, регулирует выход.Выходное напряжение возбудителя переменного тока представляет собой трехфазный переменный ток, который проходит через вращающийся шестидиодный мостовой выпрямитель, где он преобразуется в постоянный ток.
Поскольку якорь возбудителя и диоды установлены на том же валу, что и обмотки возбуждения основного генератора, два провода, которые обеспечивают положительный и отрицательный постоянный ток к полю основного генератора, могут быть подключены напрямую без использования контактных колец и щеток. Это означает, что генератор может работать длительное время между периодами обслуживания.
Ток возбуждения можно регулировать напрямую с помощью регулятора, или можно управлять выходным напряжением возбудителя для увеличения или уменьшения выходной мощности основного генератора.

Рисунок 2 Синхронный генератор с вращающимся полем с возбудителем, который подает ток на поле ротора
На рисунке 3 показан большой трехфазный синхронный генератор , который может производить до 75 МВА мощности. Это пример генератора вращающегося поля, который использует возбудитель для обеспечения тока возбуждения.
Ротор синхронного генератора может быть выполнен в виде явного или несимметричного полюса.
Термин выступ означает выступ за пределы поверхности, уровня или линии. Выступающие полюса состоят из проводов, плотно обернутых вокруг магнитных полюсных наконечников, которые выступают из ротора. Эта конструкция предназначена только для низкоскоростных генераторов, поэтому она полезна для некоторых небольших ветряных турбин и некоторых тихоходных гидроэлектрических турбин.
Генераторы с несоизмеримыми полюсами используются для более высоких скоростей и полезны на электростанциях, работающих на ископаемом топливе, и на атомных электростанциях, где они обычно вращаются со скоростью 3600 об / мин для использования пара высокого давления.
Более высокие скорости вращения создают более сильные центробежные силы, которые разъединяют роторы с явными полюсами.
Невыступающие полюса также называют полюсами турбины. Они могут быть выполнены в виде длинного стального цилиндра. Ротор изготавливается путем вдавливания обмоток в пазы полюсного наконечника, и эта конструкция может выдерживать более высокие скорости, создаваемые паровыми турбинами.
Трехфазный синхронный генератор работает
На рис. 4a показан упрощенный трехфазный генератор .Вращающееся поле показано как постоянный магнит.
Когда первичный двигатель вращает поле мимо трех обмоток статора, создается трехфазная синусоида. На рисунке 4b показан трехфазный выходной сигнал генератора.
Синусоидальная волна возникает, когда полюс обмотки возбуждения вращается мимо обмотки якоря в статоре. Если Северный полюс генерирует положительную половину синусоидальной волны, Южный полюс генерирует отрицательный полупериод.
Поскольку обмотки якоря установлены в статоре на 120 ° друг от друга, синусоидальные волны разделены на 120 °.
Большинство генераторов вырабатывают трехфазные, потому что они более эффективны. Если конечный выход должен быть постоянным, трехфазный легко преобразовать в постоянный ток с помощью диодов. Синхронный генератор не имеет скольжения, поэтому выходная частота остается постоянной, когда скорость поддерживается постоянной.

Рис. 3 Синхронный генератор для энергосистемы

Рис. 4 Трехфазный генератор вращающегося поля и трехфазная синусоида.На рисунке 4b показан выходной сигнал генератора. Для простоты ротор на рисунке 4а показан как постоянный магнит.
Синхронные генераторы, используемые в ветряных турбинах
Синхронный генератор обычно используется в ветровых турбинах, когда генератор подключен непосредственно к сети и не использует инвертор.
Основное преимущество синхронных генераторов для ветряных турбин заключается в том, что они могут получать напряжение от сети и действовать как электродвигатель, если лопасти не вращаются.
Если скорость ветра низкая, генератор может действовать как двигатель, чтобы начать вращать лопасти. Напряжение от сети помогает двигателю набрать почти синхронную скорость и запускает лопасти, вращающиеся достаточно быстро, чтобы ветер мог взять верх.
Если бы двигатель не использовался для вращения лопастей во время запуска, ветряная турбина не могла бы начать собирать энергию, пока скорость ветра не увеличится.
Когда ветер начинает подбирать и лопасти начинают собирать энергию, напряжение от сети автоматически отключается от синхронной машины, и лопасти ветряной турбины начинают вращать вал достаточно быстро, чтобы генерировать электричество.Этот переход происходит при скорости ветра выше 6 миль в час.
Еще одно преимущество использования синхронного генератора в ветряной турбине состоит в том, что при подаче постоянного тока на его катушку вращающегося поля создается очень сильное магнитное поле, и синхронный генератор почти не имеет скольжения.
Таким образом, , если генератор правильно подключен к сети, его вал постоянно работает со скоростью, близкой к расчетной, что гарантирует, что он выдает напряжение с частотой, близкой к номинальной частоте 60 Гц.
На рисунке 5 показан синхронный генератор, используемый в ветряной турбине.

Рисунок 5 Генератор для ветряной турбины
Расчет скорости синхронного генератора
Частота синхронного генератора определяется количеством полюсов в якоре и скоростью вращающегося ротора . Уравнение для частоты синхронного генератора:
\ [f = Np \ times RPM \ times 120 \]
Где
f = частота в Гц
N p = количество полюсов
об / мин = частота вращения в оборотах в минуту
Расчет частоты наведенного напряжения
Какова частота наведенного напряжения для четырехполюсного генератора, вращающегося при 1800 об / мин?
Решение:
f = Np × RPM × 120 = 4 × 1800 × 120 = 60 Гц
Расчет скорости синхронного генератора
Насколько быстро 24-полюсный генератор должен вращаться, чтобы производят 60 Гц?
Решение:
Таблица 1 суммирует количество полюсов и оборотов, необходимых для выработки частоты 50 Гц или 60 Гц, которые являются двумя наиболее распространенными частотами для электрических сетей во всем мире.
Число полюсов генератора всегда попарно, поэтому число полюсов всегда четное.
Чем больше количество пар полюсов, тем ниже скорость вращения генератора, обеспечивающего заданную частоту.
| Число полюсов | об / мин для 50 Гц | об / мин для 60 Гц | |||||
| 2 | 3,000 | ||||||
| 903 | |||||||
| 6 | 1,000 | 1,200 | |||||
| 8 | 750 | 900 | |||||
| 10 | 600 | 720 | 720 | 12 | 429 | 514 | |
| 16 | 375 | 450 | |||||
| 18 | 333 | 400 | |||||
| 20 | 300 |
Таблица 1 Количество полюсов, необходимых для создания 5 0 Гц или 60 Гц
На рисунке 6 показан второй набор полюсов поля на генераторе.Когда добавляется второй набор полюсов, выходное напряжение генератора имеет дополнительную синусоидальную волну на каждый оборот генератора.
Если добавляются дополнительные полюса, при каждом обороте ротора генерируется больше синусоид.

Рисунок 6 Выходная синусоида для генератора с четырьмя полюсами поля. Обратите внимание, что на каждый оборот ротора на выходе приходится два цикла.
Контрольный вопрос
- Каковы основные части синхронного генератора?
- Как генератор с вращающимся якорем вырабатывает напряжение?
- Как генератор вращающегося поля вырабатывает напряжение?
- Как синхронный генератор с постоянными магнитами вырабатывает напряжение?
Ответы
- Основными частями синхронного генератора являются ротор (который обычно представляет собой обмотку возбуждения или, в небольших генераторах, вращающийся постоянный магнит, способ снабжения катушек возбуждения электричеством) и статор (обычно это якорь, на котором снимается питание).Очень большие синхронные генераторы имеют возбудитель, обеспечивающий ток возбуждения. Если возбудитель вырабатывает переменный ток, есть диоды, чтобы выпрямить его до необходимого постоянного тока для поля основного генератора. У других генераторов есть подшипники, охлаждающий вентилятор и корпус.
- В генераторе с вращающимся якорем якорь представляет собой катушку, которая разрезает линии в магнитном поле, создаваемом статором, и передает выходной сигнал через контактные кольца и щетки наружу.
- В генераторе вращающегося поля поле создается либо катушкой, либо постоянным магнитом и создает вращающееся поле, которое генерирует напряжение в неподвижных катушках статора во время его вращения.Выход снимается с обмоток статора.
- Постоянный магнит создает вращающееся магнитное поле, которое индуцирует напряжение в катушках статора при прохождении через них.
Конструкция и принцип работы
Электрическая машина может быть определена как устройство, которое преобразует электрическую энергию в механическую или механическую энергию в электрическую. Электрический генератор можно определить как электрическую машину, преобразующую механическую энергию в электрическую. Электрический генератор обычно состоит из двух частей; статор и ротор. Существуют различные типы электрических генераторов, такие как генераторы постоянного тока, генераторы переменного тока, автомобильные генераторы, электрические генераторы с питанием от человека и т. Д.В этой статье давайте обсудим принцип работы синхронного генератора.
Синхронный генератор
Вращающиеся и неподвижные части электрической машины могут называться ротором и статором соответственно. Ротор или статор электрических машин действует как элемент, производящий энергию, и называется якорем. Электромагниты или постоянные магниты, установленные на статоре или роторе, используются для создания магнитного поля электрической машины. Генератор, в котором постоянный магнит используется вместо катушки для создания поля возбуждения, называется синхронным генератором с постоянными магнитами или просто синхронным генератором.
Конструкция синхронного генератора
В общем, синхронный генератор состоит из двух частей: ротора и статора. Роторная часть состоит из полюсов возбуждения, а статорная часть состоит из проводов якоря. Вращение полюсов поля в присутствии проводников якоря индуцирует переменное напряжение, которое приводит к выработке электроэнергии.
 Конструкция синхронного генератора
Конструкция синхронного генератораСкорость полюсов поля является синхронной скоростью и определяется как
Где «f» указывает частоту переменного тока, а «P» указывает количество полюсов.
Принцип работы синхронного генератора
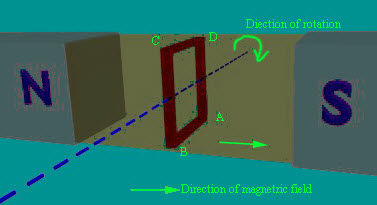
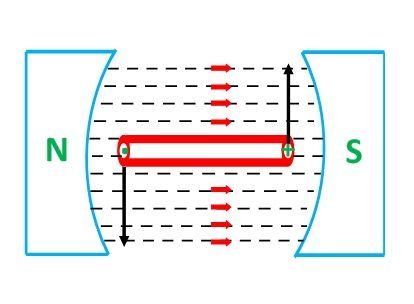
Принцип работы синхронного генератора — электромагнитная индукция. Если существует относительное движение между потоком и проводниками, то в проводниках индуцируется ЭДС. Чтобы понять принцип работы синхронного генератора, давайте рассмотрим два противоположных магнитных полюса, между которыми расположена прямоугольная катушка или виток, как показано на рисунке ниже.

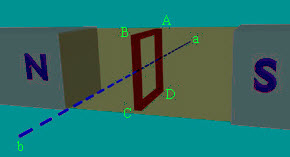 Прямоугольный проводник, расположенный между двумя противоположными магнитными полюсами
Прямоугольный проводник, расположенный между двумя противоположными магнитными полюсамиЕсли прямоугольный виток вращается по часовой стрелке против оси ab, как показано на рисунке ниже, то после завершения поворота на 90 градусов стороны проводника AB и CD окажутся перед S-полюс и N-полюс соответственно.Таким образом, теперь мы можем сказать, что касательное движение проводника перпендикулярно линиям магнитного потока от северного полюса к южному.
 Направление вращения проводника перпендикулярно магнитному потоку
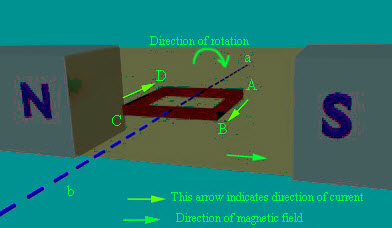
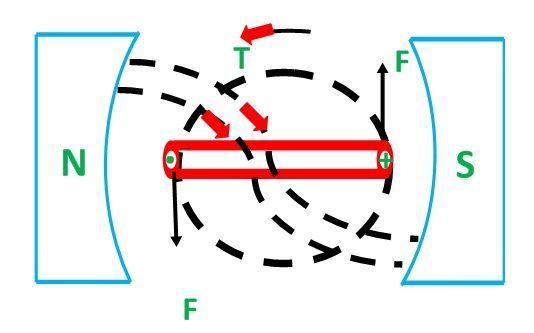
Направление вращения проводника перпендикулярно магнитному потокуИтак, здесь скорость отсечения магнитного потока проводником максимальна и индуцирует ток в проводнике, направление индуцированного тока можно определить с помощью правила правой руки Флеминга. Таким образом, мы можем сказать, что ток будет проходить от A к B и от C к D. Если проводник повернуть по часовой стрелке еще на 90 градусов, он придет в вертикальное положение, как показано на рисунке ниже.
 Направление вращения проводника параллельно магнитному потоку
Направление вращения проводника параллельно магнитному потокуТеперь положение проводника и линий магнитного потока параллельны друг другу, и, таким образом, поток не режется, и ток не индуцируется в проводнике. Затем, пока проводник поворачивается от часовой стрелки еще на 90 градусов, прямоугольный поворот переходит в горизонтальное положение, как показано на рисунке ниже. Таким образом, проводники AB и CD находятся под N-полюсом и S-полюсом соответственно. Применяя правило правой руки Флеминга, ток индуцируется в проводнике AB от точки B до A, а ток индуцируется в проводнике CD от точки D до C.
Итак, направление тока может быть указано как A — D — C — B, а направление тока для предыдущего горизонтального положения прямоугольного поворота — A — B — C — D. Если виток снова повернуть в вертикальное положение, затем индуцированный ток снова уменьшается до нуля. Таким образом, за один полный оборот прямоугольного витка ток в проводнике достигает максимума и уменьшается до нуля, а затем в противоположном направлении он достигает максимума и снова достигает нуля. Следовательно, один полный оборот прямоугольного витка производит одну полную синусоидальную волну тока, индуцируемую в проводнике, что можно назвать генерацией переменного тока путем вращения витка внутри магнитного поля.
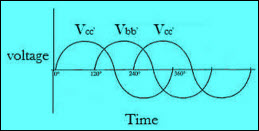
Теперь, если мы рассматриваем практический синхронный генератор, то полевые магниты вращаются между неподвижными проводниками якоря. Ротор синхронного генератора и вал или лопатки турбины механически связаны друг с другом и вращаются с синхронной скоростью. Таким образом, резка магнитного потока создает наведенную ЭДС, которая вызывает протекание тока в проводниках якоря. Таким образом, для каждой обмотки ток течет в одном направлении в течение первого полупериода, а ток течет в другом направлении во втором полупериоде с запаздыванием по времени в 120 градусов (поскольку они смещены на 120 градусов).Следовательно, выходная мощность синхронного генератора может быть показана на рисунке ниже.
Вы хотите узнать больше о синхронных генераторах и заинтересованы в разработке проектов электроники? Не стесняйтесь делиться своими взглядами, идеями, предложениями, запросами и комментариями в разделе комментариев ниже.
.Принцип работы синхронного двигателя
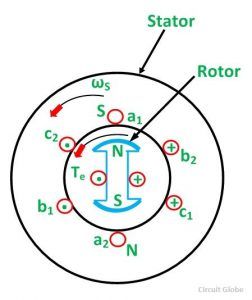
Статор и ротор — две основные части синхронного двигателя. Статор — это неподвижная часть двигателя, а ротор — их вращающаяся часть. Статор возбуждается трехфазным источником питания, а ротор возбуждается источником постоянного тока.
Термин «возбуждение» означает индукцию магнитного поля в статоре и роторе двигателя. Основная цель возбуждения — преобразовать статор и ротор в электромагнит.
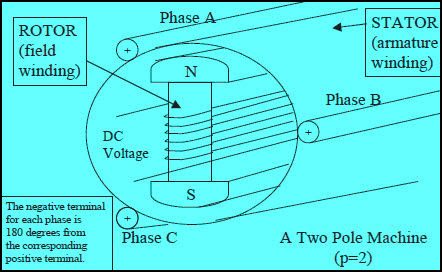
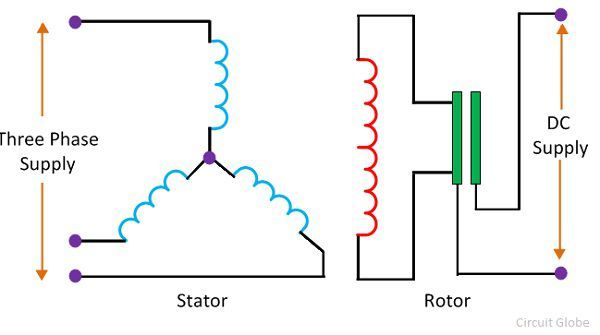 Трехфазное питание индуцирует северный и южный полюсы статора. Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюсы также меняются. Таким образом, можно сказать, что на статоре возникает вращающееся магнитное поле.
Трехфазное питание индуцирует северный и южный полюсы статора. Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюсы также меняются. Таким образом, можно сказать, что на статоре возникает вращающееся магнитное поле.
Магнитное поле возникает на роторе из-за источника постоянного тока. Полярность источника постоянного тока становится фиксированной, и, таким образом, на роторе возникает стационарное магнитное поле. Термин «стационарный» означает, что их северный и южный полюсы остаются неизменными.
Скорость, с которой вращается магнитное поле, называется синхронной скоростью. Синхронная скорость двигателя зависит от частоты источника питания и количества полюсов двигателя.
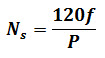
N S = 120f / P
Когда противоположные полюса статора и ротора обращены друг к другу, между ними возникает сила притяжения.Сила притяжения развивает крутящий момент в направлении против часовой стрелки. Крутящий момент — это сила, которая перемещает объект во вращении. Таким образом, полюса ротора тянулись к полюсам статора.
После каждого полупериода полюс статора меняется на противоположное. Положение ротора остается неизменным из-за инерции. Инерция — это тенденция объекта оставаться в одном положении.
Когда одинаковые полюса статора и ротора обращены друг к другу, между ними возникает сила отталкивания и крутящий момент развивается по часовой стрелке.
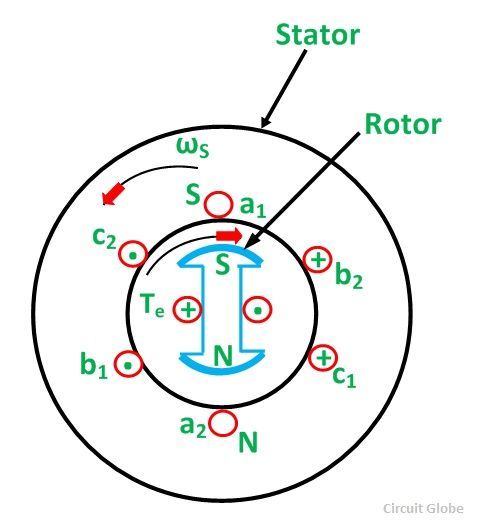
Давайте разберемся в этом с помощью схемы. Для простоты рассмотрим, что у двигателя два полюса. На рисунке ниже противоположные полюсы статора и ротора обращены друг к другу. Так между ними возникает сила притяжения.
 После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
 Неоднонаправленный крутящий момент приводит к пульсации ротора только в одном месте, и по этой причине синхронный двигатель не запускается автоматически.
Неоднонаправленный крутящий момент приводит к пульсации ротора только в одном месте, и по этой причине синхронный двигатель не запускается автоматически.
 Для запуска двигателя ротор вращается с помощью внешних средств. Таким образом, полярность ротора также изменилась вместе со статором. Полюса статора и ротора блокируют друг друга, и в двигателе возникает однонаправленный крутящий момент. Ротор начинает вращаться со скоростью вращающегося магнитного поля, или, можно сказать, с синхронной скоростью.
Для запуска двигателя ротор вращается с помощью внешних средств. Таким образом, полярность ротора также изменилась вместе со статором. Полюса статора и ротора блокируют друг друга, и в двигателе возникает однонаправленный крутящий момент. Ротор начинает вращаться со скоростью вращающегося магнитного поля, или, можно сказать, с синхронной скоростью.
Скорость двигателя фиксированная, и двигатель постоянно вращается с синхронной скоростью.
.Что такое синхронная машина? — его Основные принципы
Синхронная машина состоит как из синхронных двигателей, так и из синхронных генераторов. Система переменного тока имеет некоторые преимущества перед системой постоянного тока. Таким образом, система переменного тока используется исключительно для производства, передачи и распределения электроэнергии. Машина, которая преобразует механическую энергию в электрическую энергию переменного тока, называется синхронным генератором или генератором переменного тока. Однако, если та же машина может работать как двигатель, это называется синхронным двигателем .
Синхронная машина — это машина переменного тока, удовлетворительная работа которой зависит от соблюдения следующих соотношений.
Где,
- N с — синхронная скорость в оборотах в минуту (об / мин)
- f — частота питания
- P — количество полюсов станка.
При подключении к системе электроснабжения синхронная машина всегда поддерживает указанное выше соотношение, показанное в уравнении (1).
Если синхронная машина, работающая как двигатель, не может поддерживать среднюю скорость (N s ), машина не будет развивать достаточный крутящий момент для поддержания своего вращения и остановится. Тогда говорят, что двигатель сбит с толку.
В случае, когда синхронная машина работает как генератор, она должна работать с фиксированной скоростью, называемой синхронной скоростью, чтобы генерировать мощность на определенной частоте. Поскольку все устройства или машины предназначены для работы на этой частоте.В некоторых странах значение частоты составляет 50 герц.
Основные принципы синхронной машины
Синхронная машина — это просто электромеханический преобразователь, который преобразует механическую энергию в электрическую или наоборот. Фундаментальное явление или закон, который делает эти преобразования возможными, известны как Закон электромагнитной индукции и Закон взаимодействия .
Подробное описание приводится ниже.
Закон электромагнитной индукции
Этот закон также называют первым законом электромагнитной индукции Фарадея.Этот закон касается производства ЭДС, т.е. ЭДС индуцируется в проводнике всякий раз, когда он пересекает магнитное поле, как показано ниже.
 Закон взаимодействия
Закон взаимодействия
 Закон взаимодействия
Закон взаимодействия Этот закон относится к созданию силы или крутящего момента, т. Е. Всякий раз, когда проводник с током помещается в магнитное поле, за счет взаимодействия магнитного поля, создаваемого проводником с током, и основного поля, сила действует на проводник. производящий крутящий момент. Рисунок показан ниже.
Трехфазная синхронная машина
- Машина, которая используется в бытовых приборах, например, небольшая машина, используемая в воздухоохладителях, холодильных установках, вентиляторах, кондиционерах и т. Д.
- Однако большие машины переменного тока представляют собой синхронные машины трехфазного типа по следующим причинам.
- При одинаковом размере рамы трехфазные машины имеют мощность почти в 1,5 раза больше, чем однофазные.
- Трехфазная мощность передается и распределяется более экономично, чем однофазная мощность.
- Трехфазные двигатели самозапускающиеся (кроме синхронных двигателей).
- Трехфазные двигатели имеют абсолютно равномерный постоянный крутящий момент, тогда как однофазные двигатели имеют пульсирующий момент.
В малой синхронной машине обмотка возбуждения размещается на статоре, а обмотка якоря размещается на роторе, тогда как в большой синхронной машине обмотка возбуждения размещается на роторе, а обмотка якоря — на статоре.
.