
принцип работы и устройство (фото)
Синхронный электродвигатель – электрическая установка, действующая от сети переменного и постоянного тока. Синхронная машина улучшает коэффициент мощности. Данные моторы используются довольно часто в электрической системе, потому что они подходят для любой сети напряжения и обладают высокими экономическими данными.
Область применения
- конвейеры,
- мощные вентиляторы,
- мельницы,
- эксгаустеры,
- компрессоры,
- дробилки,
- прокатные станки.
Преимущества и недостатки
Синхронный электродвигатель имеет сложнее структуру, чем асинхронный, но обладает некоторыми достоинствами.
Главным положительным качеством данных агрегатов является способность поддерживать оптимальный режим реактивной энергии. Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Данным двигателям не страшны перебои в сети, которой равен их максимальный момент. А значение критического момента равно квадрату напряжения.
Агрегат выдерживает большую перегрузку, которую можно еще увеличить автоматически повышением тока при необходимости непродолжительной нагрузки на вал. Он имеет постоянную скорость вращения независимо от нагрузки.
Трехфазный синхронный двигатель дороже обычного асинхронного из-за сложного механизма и особого устройства.
Еще недостатком оказывается надобность в постоянном источнике энергии, функции которого выполняет выпрямитель или специализированный возбудитель.
Устройство электродвигателя
Синхронный мотор имеет две основные части — статор и ротор. Неподвижная часть называется статором, а подвижный элемент ротором.
 Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Статор представлен корпусом и сердечником, состоящим из двухфазных и трехфазных обмоток. Обмотка бывает распределенная и сосредоточенная. У распределенной насчитываются пазы полюса и фазы Q= 2,3.
У сосредоточенной обмотки пазы полюса и фазы Q=1. Пазы размещены на одинаковом расстоянии на окружности неподвижной части двигателя. Катушки статора соединяются последовательно или параллельно. Такие обмотки не могут влиять на форму кривой ЭДС. Электродвижущая сила имеет трапецеидальную и синусоидальную форму. У явно выраженного полюса форма ротора и наводимая электродвижущая сила проводника является трапециевидной формы (а). При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной. Осуществление возможно благодаря наличию скосов на наконечнике полюса ротора.

Ротор синхронного двигателя переменного тока: а — явно выраженный полюс, 6 — неявно выраженный полюс.
Неявно выраженные полюса обладают равной индуктивностью продольных и поперечных осей, а явно выраженные полюса имеют одинаковую величину поперечной и продольной индуктивности (б).
Принцип действия

Принцип действия электрической машины переменного тока: 1 — статор, 2 — ротор.
У однофазного двигателя отсутствует пусковой момент. При подключении обмотки якоря к сети переменного тока, ротор неподвижен, в обмотку возбуждения поступает постоянный ток, за время одного изменения напряжения, два раза происходит смена направления электромагнитного момента. Значение среднего момента равняется нулю. Ротор разгоняется посредством внешнего момента до вращающейся частоты, которая приближается к синхронности.
Из-за высокого значения коэффициента мощности обеспечивается снижение потребления электричества, уменьшаются потери. В сравнении с асинхронным механизмом с такой же мощностью, синхронный двигатель имеет КПД выше. Так как крутящийся момент аналогичен напряжению сети. Даже снижение напряжения не влияет на нагрузочную способность. Что свидетельствует о надежности механизма.
Тип подключения делится на однофазный и трехфазный. Синхронные агрегаты чаще бывают трехфазными. При положении проводников трехфазного двигателя в определенной геометрической позиции появляется электромагнитное поле, которое вращается с одновременной скоростью. При имении магнита во вращающемся поле, они замыкают, крутятся параллельно. Двигатель можно назвать нерегулируемым, так как его скорость постоянная.
Пуск электродвигателя
Существует два способа пуска синхронной машины.
- Асинхронное включение
Схема пуска на основе глухо подключенного возбудителя, применима для статистического момента нагрузки менее 0,4, без падений напряжения.

Асинхронный пуск с помощью трансформатора
В обмотке возбуждения замыкается сопротивление разряда, избегая тем самым перебои возбуждения обмотки на впуске, потому как на небольшой скорости вращения ротора возникают перенапряжения. Если скорость приближается к синхронной, реагирует контактор, а обмотка возбуждения переключается из разрядного сопротивления на якорь возбудителя.
- Применение тиристорного возбудителя

Возбуждение, осуществляемое при помощи электромагнитного реле
Пуск с тиристорным возбудителем более надежный, обладает высоким КПД. Легче становится управление возбуждением, напряжение шин, остановка в аварийном режиме. Во многих моделях электродвигателей установлены тиристорные возбудители. Подача возбуждения работает автоматически функцией скорости и тока.
Синхронный компенсатор
Упрощенная конструкция для холостого хода называется компенсатором.
 Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Синхронный электродвигатель применяется в сети переменного и постоянного тока, обеспечивая высокую надежность работы. Этот двигатель улучшит коэффициент мощности предприятия.
Принцип работы синхронного двигателя
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Ниже дана формула синхронной скорости:
Ns = 120F/p
Строение синхронного двигателя
Его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
//www.youtube.com/embed/5k3sXBMBKEw?feature=player_detailpage
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Устройство и принцип действия синхронного двигателя
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока.
И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение.
В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя
В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
- Явнополюсными.
- Неявнополюсными.
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск.
Именно поэтому его используют крайне редко. В
едь конструкция усложняется за счет системы запуска.
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним.
Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты.
Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
устройство, принцип работы, виды, способы пуска
Способы пуска и схемы подключения
Асинхронный электродвигатель с короткозамкнутым ротором обладает низкой себестоимостью, большими пусковыми токами и низким усилием на старте. Поэтому для различных целей могут применять различные способы пуска, снижающие бросок тока в обмотках и улучшающие рабочие характеристики:
- прямой – напряжение на электродвигатель подается через пускатели или контакторы;
- переключение схемы соединения обмоток электродвигателя со звезды на треугольник;
- понижение напряжения;
- плавный пуск;
- изменение частоты питающего напряжения.
Однофазного асинхронного двигателя.
Для асинхронного однофазного электродвигателя могут использоваться три основных способа пуска:
- С расщеплением полюсов – используется в электродвигателях особой конструкции, но недостатком методы является постоянная потеря мощности.

- С конденсаторным пуском – вводит пусковой конденсатор в момент запуска асинхронного двигателя и убирает его со схемы через несколько секунд после начала работы. Обладает максимальным вращательным моментом.
- С резисторным пуском электродвигателя – обеспечивает начальный сдвиг между векторами ЭДС обмоток для скольжения в асинхронной машине.

Трехфазного асинхронного двигателя.

Трехфазные асинхронные агрегаты могут подключаться такими способами:
- Напрямую в цепь через пускатель или контактор, что обеспечивает простоту процесса, но формирует максимальные токи. Этот способ не подходит в случае больших механических нагрузок на вал.
- Переключением схемы со звезды на треугольник – применяется для снижения токов в обмотках электродвигателя за счет уменьшения питающего напряжения с линейного на фазное.
- Путем подключения через преобразователь напряжения, реостаты или автотрансформатор для снижения разности потенциалов. Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.
 Рис. 9: прямая схема без возможности реверсирования
Рис. 9: прямая схема без возможности реверсированияРассмотрим нереверсивную схему пуска асинхронного электродвигателя (рисунок 9). Здесь, через трехполюсный автомат QF1 питание подается на пускатель KM1. При нажатии кнопки SB2 произойдет подача напряжения на обмотки электродвигателя, его остановка осуществляется кнопкой SB1. Тепловое реле KK1 применяется для контроля температуры нагрева, а лампочка HL1 сигнализирует о включенном состоянии контактора.
 Рисунок 10: схема прямого включения с реверсом
Рисунок 10: схема прямого включения с реверсомРеверсивная схема (смотрите рисунок 10) устроена аналогичным образом, но в ней используются два пускателя KM1 и KM2. Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.
Векторное управление электродвигателем «на пальцах» / Блог компании НПФ ВЕКТОР / Хабр
— Что такое векторное управление?— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления
Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот здесь есть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
— Инженерные проекты

 Здравствуйте, друзья, я надеюсь, что у вас все хорошо и все отлично. Я здесь с другой статьей об асинхронных двигателях. В этой статье я делюсь некоторыми базовыми знаниями об асинхронном двигателе с беличьей клеткой. В моей предыдущей статье, названной «Трехфазный асинхронный двигатель», я дал краткий обзор этого асинхронного двигателя с короткозамкнутым ротором.
Здравствуйте, друзья, я надеюсь, что у вас все хорошо и все отлично. Я здесь с другой статьей об асинхронных двигателях. В этой статье я делюсь некоторыми базовыми знаниями об асинхронном двигателе с беличьей клеткой. В моей предыдущей статье, названной «Трехфазный асинхронный двигатель», я дал краткий обзор этого асинхронного двигателя с короткозамкнутым ротором.
Трехфазный асинхронный двигатель имеет два типа в зависимости от конструкции ротора: асинхронный двигатель с короткозамкнутым ротором и асинхронный двигатель с фазным ротором.Бывший дешевле и широко используется, поскольку требует меньшего обслуживания, чем более поздний. Во-первых, я расскажу вам об устройстве асинхронного двигателя с короткозамкнутым ротором. Затем я расскажу о принципе работы и особенностях асинхронного двигателя с короткозамкнутым ротором. В последних разделах я расскажу о некоторых преимуществах и использовании. Проще говоря, тип 3-фазного асинхронного двигателя, в котором используется ротор с короткозамкнутым ротором, называется асинхронным двигателем с короткозамкнутым ротором .
Конструкция асинхронного двигателя с короткозамкнутым ротором
Все асинхронные двигатели имеют ротор и статор.По сути, именно конструкция ротора отличает асинхронный двигатель с короткозамкнутым ротором от асинхронного двигателя с обмоткой. Статор одинаковый у обоих типов двигателей. Давайте сначала поговорим о статоре асинхронного двигателя с короткозамкнутым ротором :
Статор асинхронного двигателя с короткозамкнутым ротором
- Статор — это тот компонент двигателя, который неподвижен.
- Это крайняя внешняя рама, в которой размещен ротор.
- Он имеет канавки по внутренней окружности для размещения электрических цепей.Эта схема возбуждается трехфазным питанием.
- Цепь трехфазной обмотки размещается в пазах. Эти обмотки разнесены на 120 градусов и соединены по схеме звезды или треугольника.
- А теперь перейдем к конструкции ротора.
Ротор асинхронного двигателя с короткозамкнутым ротором
- Ротор — это вращающаяся часть двигателя. Он содержит цилиндрический сердечник.
- Сердечник ротора изготовлен из ламината для уменьшения вихревых токов.
- Ротор с короткозамкнутым ротором состоит из медных стержней, которые мы называем проводниками.
- Медные шины или проводники длиннее ротора и закреплены в канавках сердечника ротора.
- Эти удлиненные проводники закорочены друг с другом посредством медных колец с каждой стороны.
- Также ротор иногда снабжен вентиляторами с каждой стороны для охлаждения.
- Этот тип конструкции стержней и концевых колец аналогичен беличьей клетке, на которой он назван.
- Это все о конструкции ротора. Помимо ротора и статора, у двигателя есть также другие детали для поддержки и защиты узла.
Работа асинхронного двигателя с короткозамкнутым ротором
В этом разделе я поделюсь с вами работой асинхронного двигателя с короткозамкнутым ротором.
- Когда на обмотку статора подается трехфазный переменный ток, через нее начинает течь ток.
- Этот трехфазный переменный ток создает вращающееся магнитное поле в роторе.
- Скорость вращения этого магнитного поля может быть определена по частоте источника переменного тока и количеству полюсов.
- Эта скорость является синхронной скоростью двигателя.
- Вращающееся магнитное поле статора будет индуцировать напряжение в роторе, потому что его магнитные линии пересекают ротор. Это индуцированное напряжение вызовет ток в обмотке ротора, и будет генерироваться другое магнитное поле, которое является магнитным полем ротора.
 Как вы все знаете, на проводник с током действует сила в присутствии магнитного поля. Ротор также будет испытывать силу, которая начнет его вращать.Эта сила создаст крутящий момент, и ротор будет вращаться.
Как вы все знаете, на проводник с током действует сила в присутствии магнитного поля. Ротор также будет испытывать силу, которая начнет его вращать.Эта сила создаст крутящий момент, и ротор будет вращаться.
Основные характеристики
Теперь я упоминаю некоторые важные особенности асинхронного двигателя с короткозамкнутым ротором. Я расскажу о скорости, пусковом токе, направлении вращения, скольжении и коэффициенте мощности. Первым в списке стоит скорость.
Скорость
Асинхронный двигатель с короткозамкнутым ротором обычно работает с постоянной скоростью. Эта скорость является синхронной скоростью.
Пусковой ток
Для таких двигателей требуются высокие пусковые токи.Это может привести к колебаниям напряжения.
Направление вращения
Направление вращения этих двигателей можно изменить, если поменять местами две линии электропередачи из трех.
Скольжение
Как и для других асинхронных двигателей, скольжение определяется как разница в скорости вращения магнитного поля статора и скорости вращения ротора. Скорость вращения магнитного поля называется синхронной скоростью. Скольжение выражается как отношение к синхронной скорости или в процентах.
Коэффициент мощности
Коэффициент мощности — это отношение фактической мощности к полной мощности. Выражается в процентах. Коэффициент мощности низкий, когда двигатель работает без нагрузки, и высокий, когда двигатель работает с полной нагрузкой.
Преимущества
В этой части я расскажу вам о некоторых преимуществах асинхронного двигателя с короткозамкнутым ротором.
- Асинхронные двигатели с короткозамкнутым ротором:
- Дешевые
- Прочные
- Прочные
- Требуют меньшего обслуживания
- Из-за клеточной конструкции ротора они требуют меньше материала.Таким образом, потери меди уменьшаются.
- Из-за отсутствия щеток вероятность искры снижена.
- Эти двигатели оснащены вентиляторами, поэтому выделяется меньше тепла.
Теперь я перехожу к последнему сегменту моей статьи, где я расскажу вам о некоторых применениях асинхронных двигателей с короткозамкнутым ротором.
Использует
Этот тип двигателя находит применение в промышленности из-за своей стоимости. Они широко используются в промышленности вместо асинхронных двигателей с обмоткой.Они используются в приложениях, где требуется низкий пусковой момент. Такие двигатели также могут использоваться как генераторы.
.Трехфазный асинхронный двигатель с короткозамкнутым ротором
ЗАДАЧИ
• описание конструкции трехфазного двигателя с короткозамкнутым ротором, перечисление основные компоненты этого типа мотора.
• определите следующие элементы и объясните их важность для работы трехфазного асинхронного двигателя с короткозамкнутым ротором: поле вращающегося статора, синхронная скорость, индуцированные напряжения ротора, регулирование скорости, скольжение в процентах, крутящий момент, пусковой ток, коэффициент мощности без нагрузки, коэффициент мощности при полной нагрузке, обратное вращение и контроль скорости.
• рассчитать скорость двигателя и процент скольжения.
• реверс двигателя с короткозамкнутым ротором.
• опишите, почему двигатель потребляет больше тока при нагрузке.
• нарисуйте схемы, показывающие соединения с двойным напряжением для 230/460 вольт моторный режим.
• объясните информацию на паспортной табличке двигателя.
РАБОЧИЕ ХАРАКТЕРИСТИКИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором относительно мал в физический размер для данного рейтинга мощности по сравнению с другими типами моторов.Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошую регулировку скорости. при различных условиях нагрузки. Благодаря прочной конструкции и надежности работы, трехфазный асинхронный двигатель с короткозамкнутым ротором широко используется для многих промышленных приложений (рис. 1).
КОНСТРУКТИВНЫЕ ДЕТАЛИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором обычно состоит из статор, ротор и два торцевых щита, в которых размещены подшипники, поддерживающие вал ротора.
Для этого типа двигателя требуется минимум обслуживания, поскольку
• обмотки ротора закорочены, образуя беличью клетку.
• нет коммутатора или контактных колец для обслуживания (по сравнению с DC мотор).
• нет щеток для замены.
Корпус двигателя обычно изготавливается из литой стали. Сердечник статора запрессован прямо в кадр. Два торцевых щита с подшипниками прикручены болтами к стальной литой раме.Подшипники, поддерживающие вал ротора, подшипники скольжения или шарикоподшипники. Ill 2 — это вид в разрезе собранного мотора. На рисунке 3 показаны основные части трехфазного, асинхронный двигатель с короткозамкнутым ротором.
ил. 1 Трехфазные двигатели, используемые для перекачки
ил. 2 Внешний вид конструкции и особенности типового трехфазного
взрывозащищенный двигатель: ПОЛЕВЫЕ ОБМОТКИ СТАТОРА; СМАЗОЧНАЯ ПРОБКА; ПОДЪЕМНЫЙ ГЛАЗ
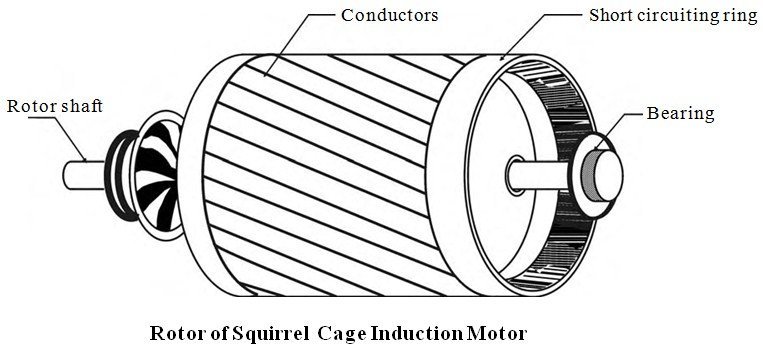
ил.3 Основные компоненты асинхронного двигателя с короткозамкнутым ротором: —РОТОР С
ОХЛАЖДАЮЩИЕ ПЛАСТИНЫ; КОРОБКА ПРОВОДОВ
ил. 4 Частично намотанный статор трехфазного двигателя
Статор
Типичный статор содержит трехфазную обмотку, установленную в пазах ламинированный стальной сердечник (илл. 4). Сама обмотка состоит из формованных катушки провода соединены так, что есть три однофазные обмотки, разнесенные 120 электрических градусов друг от друга.Три отдельные однофазные обмотки затем соединяются, обычно внутри, по схеме звезды или треугольника. Три или девять выводов от трехфазных обмоток статора выведены на клемму коробка, установленная на раме двигателя, для подключения одно- или двух напряжений.
Ротор
Вращающаяся часть двигателя состоит из стальных штамповок или пластин. расположены в цилиндрическом сердечнике (от 5 до 7). Медь или алюминий штанги монтируются у поверхности ротора.Прутки припаяны или приварен к двум медным концевым кольцам. В некоторых небольших асинхронных двигателях с короткозамкнутым ротором стержни и концевые кольца отлиты из алюминия как одно целое.
ил 5 показывает такой ротор. Обратите внимание, что ребра залиты в ротор. для циркуляции воздуха и охлаждения двигателя во время его работы. Отметим также, что стержни ротора между кольцами перекошены под углом к граням кольца. Благодаря такой конструкции работающий двигатель будет работать тише и плавнее.На левом конце вала видна шпоночная канавка. С помощью этого шпоночного паза можно зафиксировать шкив или муфту вала нагрузки.
ил. 5 ротор с короткозамкнутым ротором для асинхронного двигателя; больной. 6 Вид в разрезе
обоймы ротора; больной. 7 Беличья клетка для асинхронного двигателя
ил. 8: Торцевой щиток подшипника скольжения для открытого многофазного двигателя: SLINGER
КОЛЬЦО, МАСЛЯНЫЙ СБОРНИК; больной. 9: Торцевой щиток подшипника скольжения для многофазного
Индукционный двигатель.
Подшипники вала
Типовые подшипники скольжения показаны на 8 и 9.Внутри стенки подшипников скольжения выполнены из металла баббита, что обеспечивает гладкая, полированная и длинная изнашиваемая поверхность вала ротора. Большой маслоотражательное кольцо увеличенного размера свободно облегает вал ротора и выдвигается вниз в масляный резервуар. Это кольцо собирает и стягивает масло по вращающемуся вал и опорные поверхности. Два масляных кольца показаны на рисунке 10. Это пленка смазочного масла сводит к минимуму потери на трение. Смотровая чашка для масла на сторона каждого торцевого щита позволяет обслуживающему персоналу проверять уровень масла в подшипнике скольжения.
илл. С 14-11 по 14-14 показаны шарикоподшипниковые узлы. В некоторых моторах вместо подшипников скольжения используются шариковые подшипники. Смазка, а не масло используется для смазки шариковых подшипников. Этот тип подшипника обычно составляет две трети полный смазки на момент сборки двигателя. Специальная фурнитура есть на концевых раструбах, так что шприц для смазки может использоваться для нанесения дополнительных смазывать шарикоподшипниковые узлы через определенные промежутки времени.
При смазке роликовых подшипников снимите нижнюю заглушку, чтобы старая смазка вытесняется.Технические характеристики двигателя должны Проконсультируйтесь по поводу рекомендованного сорта смазочного материала, процедуры смазки и нагрузок на подшипники.
ил. 10 Частично собранный подшипник скольжения для полностью закрытого,
1250-сильный мотор
ил. 11 Торцевой щиток шарикоподшипника для открытого многофазного двигателя
ил. 12 Врезка однорядного шарикового подшипника:
ил. 13 Одиночный шарикоподшипник закрытого типа.
ил. 14 Подшипник шариковый двухрядный.
ПРИНЦИП РАБОТЫ ДВИГАТЕЛЯ БЛОЧКОМ
Как указано в предыдущем абзаце конструкции статора, пазы сердечника статора содержат три отдельные однофазные обмотки. Когда три токи, разнесенные на 120 электрических градусов, проходят через эти обмотки, вращающийся результаты магнитного поля. Это поле движется по внутренней части статора. ядро. Скорость вращающегося магнитного поля зависит от количества полюса статора и частота источника питания.Эта скорость называется синхронная скорость и определяется по формуле:
Синхронная скорость об / мин = 120 x частота в герцах / количество полюсов
S = 120xf / p
S = синхронная скорость
f = Герцы (частота)
p = Количество полюсов на фазу
Пример 1 . Если трехфазный асинхронный двигатель с короткозамкнутым ротором имеет шесть полюсов на обмотке статора и подключен к трехфазному, 60 герц источника, то синхронная скорость вращающегося поля составляет 1200 об / мин-оборотов В минуту.
S = 120xf / p = 120×60 / 6 = 1,200 об / мин
Поскольку это магнитное поле вращается с синхронной скоростью, оно режет медь стержни ротора и индуцирует напряжения в стержнях беличьей клетки обмотка. Эти индуцированные напряжения создают токи в стержнях ротора, которые в свою очередь создают поле в сердечнике ротора. Это поле ротора реагирует с поле статора вызывает скручивающий эффект или крутящий момент, который вращает ротор. Ротор всегда вращается со скоростью немного меньше синхронной скорости. поля статора.Это означает, что поле статора всегда будет сокращать штанги ротора. Если ротор вращается с той же скоростью, что и поле статора, поле статора не будет разрезать стержни ротора и не будет индуцированного напряжения или крутящий момент.
Регулировка скорости и проскальзывание
Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошие характеристики регулирования скорости. (отношение разницы в скорости от холостого хода к полной нагрузке). Скорость работы измеряется в процентах скольжения.Синхронная скорость вращения поле статора используется как ориентир. Напомним, что синхронный скорость зависит от количества полюсов статора и рабочей частоты. Поскольку эти две величины остаются постоянными, синхронная скорость также остается постоянным. Если скорость ротора при полной нагрузке вычитается из синхронная скорость поля статора, разница в количестве оборотов в минуту, когда ротор скользит за вращающимся полем статора.
Процентное скольжение = [(синхронная скорость — скорость ротора) / синхронная скорость] х 100
Пример 2 . Если трехфазный асинхронный двигатель с короткозамкнутым ротором используемый в Примере 1, имеет синхронную скорость 1200 об / мин и полную нагрузку. скорость 1140 об / мин, найти процент скольжения.
Синхронная скорость (Пример 1) = 1200 об / мин
Частота вращения ротора при полной нагрузке = 1140 об / мин
Процент скольжения = [(синхронная скорость — скорость ротора) / синхронная скорость] х 100
Процентное скольжение = [(1200–1140) / 1200] x 100
Процентное скольжение = 60/1200 x 100 = 0.05 х 100
Процентное скольжение = 5%
Для асинхронного двигателя с короткозамкнутым ротором, поскольку значение процентного скольжения уменьшается в сторону 0% улучшаются скоростные характеристики двигателя. Среднее Диапазон процентного скольжения для асинхронных двигателей с короткозамкнутым ротором составляет от 2% до 6 процентов.
ил. 15: Кривая скорости и кривая проскальзывания в процентах.
ill 15 показывает кривую скорости и процент скольжения для беличьей клетки. асинхронный двигатель, работающий от холостого хода до полной нагрузки.Скорость ротора без нагрузки проскальзывает за синхронной скоростью вращающегося поля статора ровно достаточно, чтобы создать крутящий момент, необходимый для преодоления трения и ветра потери без нагрузки. Поскольку на вал двигателя действует механическая нагрузка, ротор имеет тенденцию замедляться. Это означает, что поле статора (вращающееся при фиксированной скорости) режет стержни ротора большее количество раз за данную период. Индуцированные напряжения в стержнях ротора увеличиваются, что приводит к увеличению ток в стержнях ротора и более сильное поле ротора.Есть большая магнитная реакция между полями статора и ротора, которая вызывает более сильную скручивающий эффект или крутящий момент. Это также увеличивает ток статора, снимаемый с линия. Мотор способен выдерживать повышенную механическую нагрузку с очень небольшое снижение скорости вращения ротора.
Показаны типичные кривые момента скольжения для асинхронного двигателя с короткозамкнутым ротором. на рисунке 16. Выходной крутящий момент двигателя в фунт-футах (фунт-фут) увеличивается. как прямая линия с увеличением значения процентного скольжения как механическая нагрузка увеличивается до полной нагрузки.За пределами полной нагрузки, кривая крутящего момента изгибается и, наконец, достигает максимальной точки, называемой поломкой крутящий момент. Если двигатель нагружен сверх этой точки, будет соответствующий уменьшайте крутящий момент до тех пор, пока не будет достигнута точка остановки двигателя. Тем не мение, все асинхронные двигатели имеют некоторое скольжение для нормальной работы. Пусковой момент не показан, но составляет примерно 300% рабочего момента.
Пусковой ток
Когда трехфазный асинхронный двигатель с короткозамкнутым ротором подключен через полное линейное напряжение, пусковой импульс тока мгновенно достигает от 400% до 600% или более номинального тока полной нагрузки.В момент запуска двигателя ротор остановлен. В этот момент следовательно, поле статора режет стержни ротора с большей скоростью, чем когда ротор вращается. Это означает, что будет относительно высокая индуцированная напряжение в роторе, которое вызовет сильный ток ротора. Результирующий входной ток обмоток статора в момент пуска будет высоким. Из-за этого высокого пускового тока пусковая защита имеет высокий как 300 процентов от номинального тока полной нагрузки для предохранителей без задержки настройки Предусмотрено для асинхронных двигателей с короткозамкнутым ротором.
Большинство асинхронных двигателей с короткозамкнутым ротором запускаются при полном напряжении. Если здесь есть вопросы по запуску крупногабаритных двигателей на полную напряжения, следует проконсультироваться с электроэнергетической компанией. В случае что фидеры и защитные устройства электросети не могут для работы с большими пусковыми токами, пусковыми цепями пониженного напряжения должен использоваться с двигателем.
ил. 16 Кривые момента скольжения для работающего двигателя с короткозамкнутым ротором: ПОЛНАЯ НАГРУЗКА
МОМЕНТ, ПРОСМОТР, МОМЕНТ ПРИ НОМИНАЛЬНОМ НАПРЯЖЕНИИ, МОМЕНТ ПРОБИРАТЕЛЬНОГО МОМЕНТА
Коэффициент мощности
Низкий коэффициент мощности асинхронного двигателя с короткозамкнутым ротором на холостом ходу и при низкой нагрузке.Без нагрузки коэффициент мощности может составлять всего Отставание на 15 процентов. Однако, когда к двигателю приложена нагрузка, мощность фактор увеличивается. При номинальной нагрузке коэффициент мощности может достигать Отставание от 85 до 90 процентов.
Коэффициент мощности на холостом ходу низкий, поскольку намагничивающая составляющая входной ток составляет большую часть от общего входного тока двигателя. Когда нагрузка на двигатель увеличивается, подающий синфазный ток к двигателю увеличивается, но намагничивающая составляющая тока остается практически то же самое.Это означает, что результирующий линейный ток больше почти в фазе с напряжением, и коэффициент мощности улучшается, когда двигатель нагружен по сравнению с ненагруженным двигателем, имеющим намагничивание ток как основной компонент входного тока.
ил 17 показывает увеличение коэффициента мощности в режиме холостого хода. до полной загрузки. На диаграмме холостого хода синфазный ток (Iw) невелик. по сравнению с током намагничивания (Im), таким образом, коэффициент мощности равен плохой без нагрузки.На диаграмме полной нагрузки синфазный ток увеличился при этом ток намагничивания остается прежним. В результате угол задержки линейного тока уменьшается, а коэффициент мощности увеличивается.
ил. 17 Коэффициент мощности без нагрузки и при полной нагрузке. БОЛЬШОЙ УГОЛ ОТСТАВКИ —
НИЗКИЙ КОЭФФИЦИЕНТ МОЩНОСТИ, БЕЗ НАГРУЗКИ, ПОЛНАЯ НАГРУЗКА
Реверс вращения
Направление вращения трехфазного асинхронного двигателя можно реверсировать охотно.Двигатель будет вращаться в противоположном направлении, если любые два из три линейных провода перевернуты (рис. 18). Отведения перевернуты у мотора.
ил. 18: Обратное вращение асинхронного двигателя: ВРАЩЕНИЕ ДО / ПОСЛЕ
ПОДКЛЮЧЕНИЯ ИЗМЕНЕНЫ
Контроль скорости
Асинхронный двигатель с короткозамкнутым ротором почти не изменяет скорость без внешний контроль. Напомним, что скорость двигателя зависит от частоты трехфазного источника и числа полюсов обмотки статора.
Частота питающей сети обычно 60 герц, поддерживается по этой стоимости местной энергокомпанией. Поскольку количество полюсов в двигателе также есть фиксированное значение, синхронная скорость двигателя остается постоянным. В результате невозможно получить диапазон скорость без изменения применяемой частоты. Его можно контролировать с помощью система электронного привода переменного тока с регулируемой частотой или путем изменения количества опор с помощью внешних контроллеров.
ИНДУКЦИОННЫЕ ДВИГАТЕЛИ С ДВОЙНЫМ НАПРЯЖЕНИЕМ
Многие трехфазные асинхронные двигатели с короткозамкнутым ротором предназначены для работы при двух разных номинальных напряжениях. Например, типичный номинал двойного напряжения для трехфазного двигателя 230/460 вольт.
ил 19 показывает типичную обмотку статора, соединенную звездой, которая может быть используется либо для 230 вольт, трехфазный, либо для 460 вольт, трехфазный. Каждый из трех однофазных обмоток состоят из двух обмоток катушки.Там это девять выводов, выведенных наружу из обмотки статора этого типа. Эти выводы, обозначенные как выводы с 1 по 9, заканчиваются в клеммной коробке мотор. Чтобы отметить выводы, начните с верхнего левого вывода T1 и продолжайте движение по часовой стрелке по спирали к центру, отмечая каждый вывод, как показано на рисунке.
ил. 19: Метод определения маркировки клемм.
ил. 20: соединение звездой на 460 В. Катушки соединены последовательно.
ил 20 показывает соединения, необходимые для управления двигателем от 460-вольтовый, трехфазный источник. Две катушки каждой однофазной обмотки соединены последовательно, илл. 14-21 показаны соединения, позволяющие работать от трехфазного источника на 230 В.
ил. 21: соединение звездой 230 В. Катушки подключены параллельно.
Двигатели с соединением звездой
Если идентификация отведения 9-проводная (двойное напряжение), 3-фазная, звезда подключена мотор был разрушен, электрик должен повторно идентифицировать их перед подключение двигателя к линии.Можно использовать следующий метод. Первый, определите внутреннюю подключенную точку звезды, проверив целостность цепи между тремя выводами, как на рисунке 22 A.
Затем идентифицируйте три других набора катушек по непрерывности между двумя ведет за один раз (илл. 22 B). Назначьте T7, T8 и T9 любому из трех выводы постоянных катушек, соединенных звездой (а). Применить более низкий рейтинг линейное напряжение двигателя к T7, T8 и T9 и работайте, чтобы проверить направление вращения.Отключите сетевое напряжение и подключите одно из неопределенных катушки к T Подключите питание, оставив линии на T7, T8 и T9. Если катушка правильно подключена и является правильной катушкой, напряжение должно быть примерно в 1,5 раза выше линейного напряжения между свободным концом и другим две строки. Остерегайтесь сетевого напряжения.
Если выбрана правильная катушка, но в обратном порядке, напряжение между свободный конец и два других вывода будут составлять около 58% от линейного напряжения.Если выбрана неправильная катушка, разница напряжений между свободными конец и два других вывода линии будут неровными (см. рисунок 22 C).
Когда показания равны и примерно в 1,5 раза больше напряжения сети, Отметьте провод, подключенный к T7, как T4, а другой конец катушки как T1.
Выполните те же испытания с другой катушкой, подключенной к T. Отметьте эти провода. T и T Выполните тот же тест с последней катушкой, подключенной к 19, чтобы определить 13 и 16 отведения.
Подключите L1 к T1, L2 к T2, L3 к T3 и T4 к T7, T5 к T8, T6 к T9 и включите двигатель. Двигатель должен работать в том же направлении, что и раньше и работать спокойно.
ил. 22: Двигатель, подключенный звездой или звездой; A) Внутренняя маркировка выводов звезды;
B) Маркировка выводов группы катушек C) Проверка правильности маркировки выводов катушек на
Двигатель с двойным напряжением, соединенный звездой
Двигатели, соединенные треугольником
Другой способ подключения трехфазных двигателей — соединение треугольником. мотор.Он назван так потому, что получившийся схематический узор выглядит как греческая буква Дельта (символ дельты).
Метод идентификации и подключения этих выводов необходим, поскольку он отличается от двигателя, подключенного звездой или звездой.
Правильное подключение выводов треугольник подключен, трехфазный, Двигатель с двойным напряжением представляет проблему, если маркировка выводов повреждена.
ил. 23: Девять выводов треугольника, трехфазного, двойного напряжения
двигатель
Сначала электрик должен определить, подключен ли двигатель треугольником. или звезда подключена.Оба двигателя имеют девять выводов, если они двухвольтные. моторы. Однако двигатель, подключенный по схеме треугольника, имеет три комплекта по три провода. которые имеют непрерывность, а двигатель, подключенный звездой, имеет только один комплект из трех.
Чтобы продолжить, необходим чувствительный омметр, чтобы найти середину каждого группа из трех отведений. Значения сопротивления низкие при использовании постоянного тока омметр, поэтому будьте осторожны при определении центра каждой группы катушек. Обозначьте центр каждой группы T1, T2 и T3 соответственно.Использование маскировки ленты, временно обозначьте другие отведения группы T1 как T4 и T9. ил 23 А.
Временно отметьте концы группы T2 как T5 и T7 и отметьте концы группы Т3 как Т6 и Т8.
Подключите двигатель с более низким номинальным напряжением, используя линии 1, 2 и 3, к T1, Т4 и Т9. Остальные катушки будут иметь наведенное напряжение, поэтому будьте осторожны, прикоснуться к другим свободным проводам друг к другу или к вам!
Отключите питание и подсоедините провод с маркировкой T4 к T7.Подключите мощность, как и раньше, и считайте напряжение между T1 и T2. Если маркировка правильные, напряжение должно быть примерно в два раза выше приложенного линейного напряжения. Если он показывает примерно в 1,5 раза больше напряжения в сети, снова подключите T4 к проводу. отмечен Т5. Если напряжение T1 — T2 затем упадет до 220, повторно подключите T9 к T7. тем самым меняя обе катушки. Когда напряжение от T1 до T2 равно удвоенному значению приложенного сетевого напряжения, пометьте соединенные вместе провода как T4 от Группа T1 подключена к T7 группы T2.
Теперь используйте третью группу катушек. Оставьте нижнюю линию напряжения подключенной к первая группа по-прежнему. Проверьте и подключите провода так, чтобы при включении T9 подключенный к проводу третьей группы, напряжение T1-to-T2 в два раза больше приложенное линейное напряжение. Пометьте провод, подключенный к T9, как T6, а другой конец группы катушек как T8.
Для двойной проверки отключите провод линии от T9 и снова подключите к T7. отсоедините сетевой провод от T1 и снова подсоедините его к T2, отсоедините провод от Т9 и подключите его к Т5. Двигатель должен работать в том же направление как раньше.Если этого не произошло, еще раз проверьте маркировку проводов.
Для дальнейшей проверки переместите провода от T7 к T8, от T2 к T6 и от T5 к T3. Запустить мотор. Поворот должен быть таким же, как и в предыдущем шаги. Будьте осторожны! На другие обмотки наведено напряжение. (см. илл 24).
ил. 24 Иллюстрация испытаний напряжением, используемых для определения правильного вывода
маркировка на моторе Delta
НАИМЕНОВАНИЕ ДВИГАТЕЛЯ
Таблички с паспортными данными двигателясодержат информацию, важную для правильного выбора и установки двигателя.Наиболее полезные данные, указанные на заводской табличке, относятся к к электрическим характеристикам двигателя. Зная эту информацию и используя Национальный электротехнический кодекс, электрик может определить размеры кабелепровода, провода и пусковой и работающей защиты. (NEC дает минимальные требования.)
Данные о конструкции и производительности, указанные на паспортной табличке, полезны для технического обслуживания. персонал. Информация жизненно важна для быстрой и правильной замены двигателя, если необходимо.Для лучшего понимания мотора типичный Информация на паспортных табличках двигателя описывается следующим образом (рис. 25).
• Название производителя
• Тип определяет тип корпуса. Это производитель кодовая система идентификации.
• Серийный номер — это конкретный идентификатор двигателя. Это человек номер, присвоенный двигателю, похожий на номер социального страхования для человек. Он хранится у производителя.
• Номер модели является дополнительной идентификацией производителя, обычно используется для целей заказа.
• Размер корпуса определяет размеры двигателя.
• Коэффициент обслуживания (или SF) — коэффициент обслуживания 1,0 означает, что нельзя ожидать, что двигатель будет обеспечивать мощность, превышающую номинальную. Мотор будет безопасно работать, если номинальная мощность в лошадиных силах умножена на коэффициент обслуживания, максимум. Общие сервисные коэффициенты от 1,0 до 1.15. Рекомендуется, чтобы двигатель не может работать непрерывно в диапазоне эксплуатационных коэффициентов. Это может сократить срок службы изоляционной системы.
Ампер означает ток, потребляемый из линии, когда двигатель работает. при номинальном напряжении и частоте при полной номинальной мощности, указанной на паспортной табличке.
• Вольт должно быть значением, измеренным на клеммах двигателя, и должно быть значением, на которое рассчитан двигатель.
• Класс изоляции относится к изоляционному материалу, используемому в обмотке. статор двигателя.Например, в системе класса B максимальная рабочая температура 130 ° С; для класса F это 155 ° C; а для класса H это 180 ° С.
• об / мин (или об / мин) означает скорость в оборотах в минуту, когда все остальные соблюдены условия паспортной таблички.
• Герцы — это частота системы питания, для которой предназначен двигатель. Производительность будет изменена, если он будет работать на других частотах.
• Режим работы — это рабочий цикл, при котором двигатель может безопасно работать.«Непрерывный» означает, что двигатель может работать с полной нагрузкой 24 часа в сутки. Если «средний» отображается временной интервал. Это означает, что двигатель может работать при полной загрузке за указанный период. Затем следует остановить двигатель и дать ему остыть перед повторным запуском.
• Температура окружающей среды указывает максимальную температуру окружающего воздуха. при котором двигатель может работать для обеспечения номинальной мощности.
• Ввод фазы указывает количество фаз напряжения, при которых двигатель предназначен для работы.
• кВА — это буквенный код, обозначающий заблокированный ротор, кВА на лошадиных сил. Это используется для определения пускового оборудования и защиты. для мотора. Таблицу кодовых букв можно найти в Национальном электротехническом Код.
• КПД выражается в процентах. Это значение находится в стандартном двигатели, а также двигатели с «премиальной эффективностью».
• Шум — некоторые двигатели имеют низкий уровень шума. Уровень шума Значение, указанное на паспортной табличке, измеряется в единицах звука «дБА».
• Примечания производителя — список конкретных характеристик двигателей, таких как «Термозащищенные» и / или «подшипники со шкалой».
ВЫСОТА
Гарантии производителя для стандартных двигателей обычно основаны на при работе на любой высоте до 3300 футов. Двигатели пригодные для эксплуатации на высоте более 3300 футов над уровнем моря имеют особую конструкцию и / или другой класс изоляции. Например, стандартные двигатели с коэффициентом обслуживания 1.15 может эксплуатироваться на высоте до 9900 футов, используя коэффициент обслуживания. На высоте 9900 футов коэффициент обслуживания будет 1,00. Может потребоваться снизить мощность двигателя. или используйте рамку большего размера.
РЕЗЮМЕ
Трехфазные асинхронные двигатели используют в роторе короткозамкнутую обмотку. Электрические соединения с ротором отсутствуют, но ток индуцируется. в обмотки ротора за счет электромагнитной индукции.Беличья клетка обмотка создает магнитное поле, которое толкает и тянет статор магнитное поле.
Ротор поддерживается стальным валом, который должен вращаться. Вал допускается вращение с применением различных типов подшипников и различных смазок. Синхронная скорость, регулировка скорости и процент скольжения все расчеты используются для определения скорости ротора. Мотор электрические характеристики, такие как коэффициент мощности и пусковой ток связанные с электрической схемой двигателя.
Если маркировка выводов двигателя разрушена, выводы можно пометить заново. в соответствии с процедурами, описанными в этом блоке. Данные паспортной таблички двигателя является важной информацией, которую следует использовать при заказе двигателей на замену. Некоторые информация на паспортной табличке важна для правильной замены рабочего характеристики и другие данные используются для расчета параметров электропитания и защиты двигателя.
ВИКТОРИНА
A. Ответьте на следующие утверждения и вопросы.
1. Перечислите основные части асинхронного двигателя с короткозамкнутым ротором. ___________
2. Назовите два преимущества использования асинхронного двигателя с короткозамкнутым ротором. _______
3. Назовите два недостатка асинхронного двигателя с короткозамкнутым ротором. ________
4. Перечислите два фактора, которые определяют синхронную скорость индукции. мотор.
5. Объясните, как изменить направление вращения трехфазного, асинхронный двигатель с короткозамкнутым ротором.
6. Четырехполюсный трехфазный асинхронный двигатель с короткозамкнутым ротором с частотой 60 Гц имеет скорость полной нагрузки 1725 об / мин. Определите синхронную скорость этого мотор.
7. Какой процент скольжения двигателя указан в вопросе 6? ______________
8. Почему термин «беличья клетка» применяется к этому типу трехфазной индукции? мотор?
B. Выберите правильный ответ для каждого из следующих заявления.
9.Кто или что определяет, можно ли запускать большие асинхронные двигатели при полное напряжение на линии?
а. максимальный размер двигателя
г. номинальное напряжение
г. Энергетическая компания
г. отдел строительства и безопасности
10. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего разгружен __
а. так же, как и при полной загрузке.
г. очень бедный.
г. очень хорошо.
г. средний.
11. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего с полной нагрузкой _____
а. улучшается без нагрузки.
г. уменьшается с холостого хода.
г. остается таким же, как и без нагрузки.
г. становится 100 процентов.
12. Асинхронный двигатель с короткозамкнутым ротором популярен благодаря своим характеристикам. из:
а. высокий процент скольжения.
г.низкий процент скольжения.
г. простая, прочная конструкция.
г. хорошая регулировка скорости.
13. Скорость асинхронного двигателя с короткозамкнутым ротором зависит от:
а. приложенное напряжение.
г. частота и количество полюсов.
г. Напряженность поля.
г. сила тока.
14. Скорость рассчитывается по формуле:
а. p = (120xf) / об / мм
г. Обороты = 120xp / f
г.Обороты = (p x f) / 120
г. Об / мин = 120xf) / p
C. Нарисуйте следующие схемы подключения.
15. Покажите схему подключения девяти оконечных выводов соединенного звездой трехфазный двигатель на 230/460 вольт для работы при 460 вольт, три фаза.
16. Покажите схему подключения девяти оконечных выводов соединенного звездой трехфазный двигатель на 230/460 вольт для работы при 230 вольт, трехфазный.
.Асинхронные двигатели с короткозамкнутым ротором — EnggCyclopedia
Пожалуй, наиболее известным типом электродвигателей, используемых в настоящее время, является трехфазный асинхронный двигатель с короткозамкнутым ротором .
Обычно он состоит из двух (2) основных компонентов: статора и ротора . Как следует из их названия, часть статора неподвижна, а часть ротора вращается. Статор создает вращающееся магнитное поле по сравнению с ротором, которое преобразует этот тип энергии в движение, т.е.е. механическая энергия. См. Рис. 1 (D-конец обозначает конец с приводом от двигателя, т. Е. Оборудование, приводимое в движение двигателем, например, насос, расположено на этой стороне, тогда как конец N обозначает неприводной конец двигателя)
Рисунок 1 — Конструкция электродвигателяКак работает электродвигатель
Чтобы объяснить, как работает электродвигатель, необходимо сначала отметить, что статор подключен к трехфазному источнику питания. Ток, который подается на обмотки статора, создает вращающееся магнитное силовое поле, которое, в свою очередь, создает ток также и на роторе двигателя.В результате на роторе также создается магнитное поле. Взаимодействие между этими двумя магнитными полями (т.е. от статора и от ротора) дает вращающий момент , который является причиной вращения вала ротора.
Скорость вращения двигателя и скольжение двигателя
Из-за различных потерь, присущих самой природе двигателя, скорость двигателя всегда примерно на 1–3% ниже по сравнению с синхронной скоростью магнитного поля. Эта разница обычно обозначается как скольжение двигателя (я) .
Скольжение рассчитывается по следующей формуле:
s = (n1 — n) / n1 …. (1), где:
n1 = синхронная скорость
n = асинхронная скорость
В результате этот тип двигателей обычно известен как асинхронные двигатели .
Однако следует отметить, что двигатели с постоянными магнитами вообще не производят скольжения (двигатели с постоянными магнитами в этой статье обсуждаться не будут)
Синхронная скорость (n), , выраженная в оборотах в минуту (или об / мин), определяется по следующей формуле:
n = (120 * f) / p …. (2), где:
f = частота питания двигателя (в Гц) и
p = количество полюсов двигателя (четное число)
КПД электродвигателя
Как и ожидалось, преобразование энергии в асинхронном двигателе с короткозамкнутым ротором не без потерь. Происходит несколько потерь, среди прочего, в результате потерь сопротивления, потерь на вентиляцию, потерь на трение и т.д.
Следовательно, КПД двигателя (n) выражается следующей формулой:
n = P2 / P1 …. (3), где
P2 = мощность на валу двигателя (Вт)
P1 = приложенная электрическая мощность (Вт)
P2 указан на заводской табличке двигателя.
Класс изоляции
Класс изоляции относится к изоляционному материалу обмоток двигателя. Существует несколько классов изоляции, а именно B, F и H, в соответствии со стандартами IEC (Международной электротехнической комиссии). Буква, соответствующая температуре, которая является верхним пределом для области применения изоляции, характеризует каждый класс изоляции.
Класс изоляции B соответствует максимальной температуре обмотки 130 ° C (температура окружающей среды 40 ° C + повышение температуры 80 ° C + температурный запас 10 ° C)
Класс изоляции F соответствует максимальной температуре обмотки 155 ° C (температура окружающей среды 40 ° C + повышение температуры 105 ° C + температурный запас 10 ° C)
Класс изоляции H соответствует максимальной температуре обмотки 180 ° C (температура окружающей среды 40 ° C + повышение температуры 125 ° C + температурный запас 15 ° C)
Класс защиты
Класс защиты двигателя обозначается буквами IP ( IP означает Ingress Protection ), за которыми следуют две цифры, первая из которых указывает степень защиты от контакта и проникновения твердых предметов, а вторая указывает на степень защиты двигателя. степень защиты от воды.Эта классификация соответствует стандарту IEC 60034-5. Для получения более подробной информации о обозначении защиты IP, пожалуйста, обратитесь к статье Enggyclopedia о «Корпуса защиты от проникновения».
Способ охлаждения
Методы охлаждения в соответствии с IEC 60034-6 могут сказать, как охлаждается асинхронный двигатель с короткозамкнутым ротором. Метод охлаждения обозначается буквами IC ( IC обозначает International Cooling ), за которыми следует серия цифр, обозначающих тип охлаждения (например,грамм. самовентилируемый, принудительное охлаждение и т. д.) и режим работы охлаждения (например, охлаждение поверхности, жидкостное охлаждение и т. д.). См. Рисунок 2, на котором показаны наиболее распространенные методы охлаждения асинхронных двигателей с короткозамкнутым ротором.
Рисунок 2 — Распространенные методы охлаждения электродвигателя .Ошибка
Перейти к основному содержанию☰Боковая панель
 Мои курсы
Мои курсы- Школы Школа искусств, дизайна и архитектуры (ARTS) Школа бизнеса (BIZ) Школа химической инженерии (CHEM) –SРуководства для студентов (CHEM) — Инструкция по написанию отчета (ХИМ) Школа электротехники (ELEC) Школа инженерии (ENG) Школа наук (SCI) Языковой центр Открытый университет Библиотека Программа педагогической подготовки университета Аалто UNI (экзамены) Песочница
- КОРОНАВИРУС ИНФОРМАЦИЯ Opiskelijoiden liikkuminen kampuksella lukuvuoden alkaessa Студенческая мобильность на кампусе в начале учебного года Studenternas rörlighet på campus i början av läsåret Opetus ja opiskelu kampuksella syksyllä 2020 Обучение и обучение в кампусе осенью 2020 г. Undervisning och studier på campus hösten 2020 Коронавирус — tietoa opiskelijalle Коронавирус — информация для студентов Коронавирус — информация для студента Corona в помощь учителям
- Ссылки на услуги Мои курсы — Инструкции для учителей — Цифровые инструменты для обучения — Инструкции по защите персональных данных для учителей — Инструкции для студентов — Рабочее место для авторского надзора WebOodi В портал для студентов Курсы.aalto.fi Библиотечные услуги — Ресурсы — Имагоа / Открытая наука и изображения IT услуги