
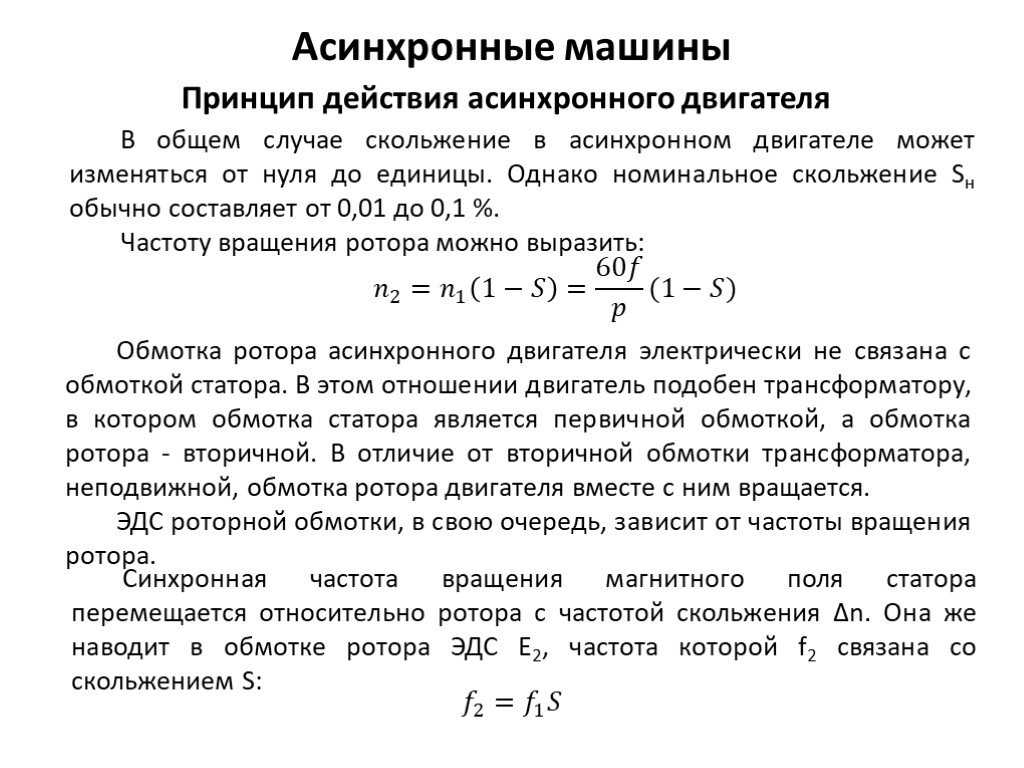
Синхронная и асинхронная частота вращения электродвигателя. Что представляет собой асинхронный электродвигатель? Принцип работы синхронного двигателя
Асинхронные двигатели — это двигатели, в процессе работы которых под нагрузкой наблюдается явление скольжения, то есть «отставание» вращения ротора от вращения магнитного поля статора. Другими словами, вращение ротора происходит не синхронно с вращением намагниченности статора, а асинхронно по отношению к этому движению. Вот почему такого рода двигатели называются асинхронными (не синхронными) двигателями.
В большинстве случаев, произнося словосочетание «асинхронный двигатель», имеют ввиду именно бесколлекторный двигатель переменного тока. Величина скольжения асинхронного двигателя может быть разной в зависимости от нагрузки, а также от параметров питания и способа управления токами обмотки статора.
Если мы имеем дело с обычным двигателем переменного тока, наподобие АИР712А, то при синхронной частоте вращения магнитного поля в 3000 оборотов в минуту, в условиях номинальной механической нагрузки на валу в 750 ватт, мы будем иметь реальную частоту вращения 2840 оборотов в минуту, а значит величина скольжения составит 0,053.
Это нормальное явление для асинхронного двигателя. И мы не увидим круглых цифр оборотов, вроде 3000 или 1500, вместо них там будет указано 2730 или 1325. Вместо 1000 может быть написано например 860, несмотря на то, что магнитное поле во время работы двигателя вращается с частотой 1000 оборотов в минуту, как и должно быть в электрической машине с 3 парами магнитных полюсов, предназначенной для питания переменным током частотой 50 Гц.
Что касается двигателей постоянного тока, то в большинстве случаев так называют коллекторные двигатели, на скорость вращения ротора у которых влияет не частота тока, а его средняя величина. Датчик скорости может помочь электронной системе управления установить правильную величину тока для получения заданной скорости вращения, однако связь тока и оборотов здесь будет отнюдь не линейной, так как при разной нагрузке токи разной величины дадут очень разные частоты вращения ротора.
На роторе двигателя постоянного тока может располагаться многосекционная обмотка возбуждения или постоянные магниты.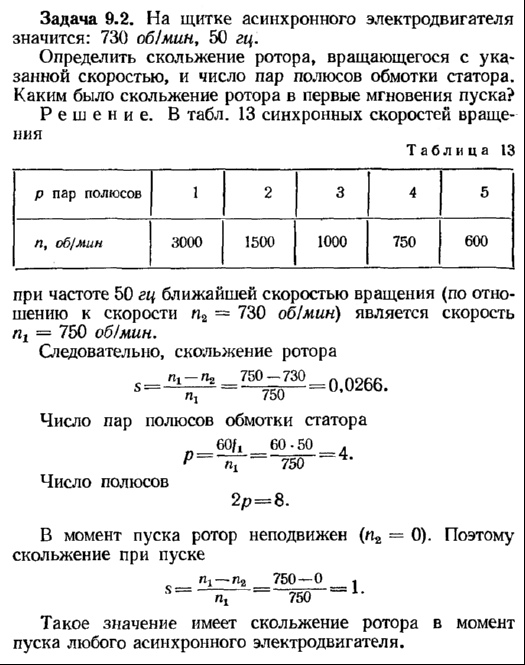 Но сегодня ротор с магнитами характерен скорее для шаговых двигателей, которые тоже относятся к двигателям постоянного тока, однако коллекторно-щеточных узлов не имеют. Как вариант разновидности конструкции мотора постоянного тока — магниты на статоре, а обмотка — на роторе.
Но сегодня ротор с магнитами характерен скорее для шаговых двигателей, которые тоже относятся к двигателям постоянного тока, однако коллекторно-щеточных узлов не имеют. Как вариант разновидности конструкции мотора постоянного тока — магниты на статоре, а обмотка — на роторе.
Так или иначе, асинхронный бесколлекторный двигатель имеет мощную рабочую обмотку на статоре, которая в процессе работы разогревается от прохождения по ней рабочего тока, и передает тепло на корпус двигателя. Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
В связи с этой особенностью, большинство асинхронных двигателей по умолчанию имеют на своих валах крыльчатки вентиляторов, а на корпусах — выступы, вдоль которых вентилятор, как через радиатор, гонит свежий воздух, охлаждая таким образом статор. Поэтому, если перед вами двигатель, на валу которого установлен вентилятор (обычно под крышкой, закрепленной на корпусе двигателя), вдоль корпуса имеются ребра (как на радиаторе), а на шильдике указана конкретная величина оборотов в минуту и величины переменного напряжения 220/380 — пред вами типичный асинхронный двигатель переменного тока.
В двигателях постоянного тока, с коллекторно-щеточными узлами и с многосекционными многовитковыми обмотками на якарях, выведенными на ламели коллектора, в качестве рабочих обмоток выступают — и обмотка статора, и обмотка ротора (якоря).
Здесь фактически получается, что рабочая обмотка как-бы разделена на две части: рабочий ток идет и через якорную обмотку, и через статорную обмотку, поэтому проблема нагрева только статора отсутствует, и вентилятор здесь не нужен.
Для охлаждения достаточно вентиляционных отверстий, через которые можно разглядеть ротор с якорной обмоткой на нем. Поэтому, если перед вами двигатель с коллекторно-щеточным узлом, где коллектор имеет множество ламелей (блестящих пластинок) с выводами от обмоток, и вентилятора словно бы и не предусмотрено — перед вами двигатель постоянного тока.
Статор двигателя постоянного тока может представлять собой набор постоянных магнитов. Большинство двигателей постоянного тока, рассчитанных на сетевое напряжение, будут легко работать и от переменного тока (пример такого универсального мотора — мотор болгарки).
Прежде чем разобраться, в чём их отличие, необходимо выяснить, что такое электродвигатель? Электродвигатель – это электрическая машина, которая приводится в действие от электроэнергии и служит приводом для других механизмов.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Итак, примитивный синхронный электродвигатель работает, когда на рамку подаётся ток. У настоящего синхронного электродвигателя, роль рамки выполняет ротор с катушками проводов, называемых обмотками, на которые подаётся ток (они служат источниками электромагнитного поля). А роль подковообразного магнита выполняет статор, изготовленный либо из набора постоянных магнитов, либо тоже из катушек проводов (обмоток), которые, при подаче тока являются также источниками электромагнитного поля.
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.
Объяснение принципа работы асинхронного электродвигателя для «чайников»
Вспоминаем описание рисунка в предыдущем примере. Та же рамка, расположенная между полюсами подковообразного магнита, только её концы не имеют полуколец, они соединены между собой.
Теперь начинаем вращать вокруг рамки подковообразный магнит. Вращаем его медленно и наблюдаем за поведением рамки. До некоторых пор рамка остаётся неподвижной, а потом, при повороте магнита на определённый угол, рамка начинает вращение вслед за магнитом. Вращение рамки запаздывает по сравнению со скоростью вращения магнита, т.е. она вращается не синхронно с ним – асинхронно. Вот и получается, что это примитивный асинхронный электродвигатель.
Вообще-то роль магнитов в настоящем асинхронном двигателе служат обмотки, расположенные в пазах статора, на которые подаётся ток.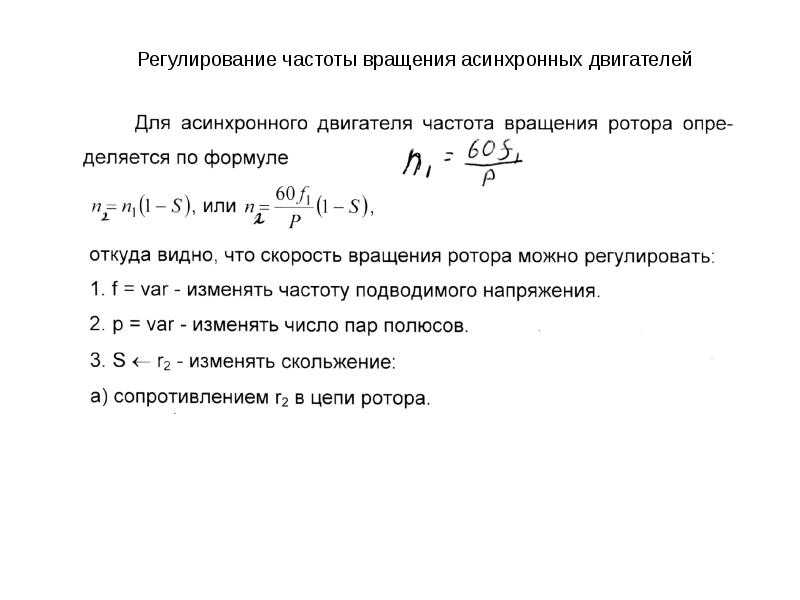 А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.
А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.
В чём же отличия синхронного и асинхронного электродвигателей?
Если поставить рядом два современных электродвигателя одного и другого типа, то по внешним признакам их отличить трудно даже специалисту.
По существу, их главное отличие рассмотрено в приведённых примерах принципов работы этих электродвигателей. Они отличаются по конструкции роторов . Ротор синхронного электродвигателя состоит из обмоток, а ротор асинхронного представляет собой набор пластин.
Статоры одного и другого электродвигателей почти неотличимы и представляют собой набор обмоток, однако, статор синхронного электродвигателя может быть набран из постоянных магнитов.
Обороты синхронного двигателя соответствуют частоте подаваемого на него тока, а обороты асинхронного несколько отстают от частоты тока.
Отличаются они и по сферам применения . Например, синхронные электродвигатели ставят для привода оборудования, которое работает с постоянной скоростью вращения (насосы, компрессоры и т.д.) не снижая её с увеличением нагрузки. А вот асинхронные электродвигатели снижают частоту вращения при увеличении нагрузки.
Например, синхронные электродвигатели ставят для привода оборудования, которое работает с постоянной скоростью вращения (насосы, компрессоры и т.д.) не снижая её с увеличением нагрузки. А вот асинхронные электродвигатели снижают частоту вращения при увеличении нагрузки.
Синхронные электродвигатели конструктивно сложней, а значит, и дороже асинхронных электродвигателей.
Всем известно, что основное предназначение электродвигателей – это преобразование электрической энергии в энергию механическую. Это обнаружил аж в 1821 году Майкл Фарадей, который проводил опыты с магнитами и магнитным полем. С тех пор прошло много времени, а электрические моторы заняли свое основное место в промышленности и быту. Без них сегодня никуда. В настоящее время производители электродвигателей предлагают большое количество моделей, различающихся по конструкции и принципу действия. Это двигатели постоянного и переменного тока, синхронные и асинхронные. Нас сегодня интересует именно синхронный и асинхронный двигатель – отличия.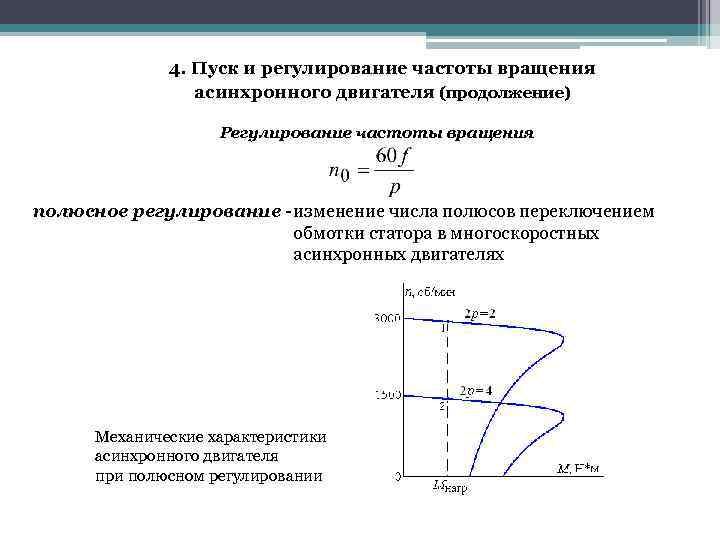
Чтобы разобраться в отличиях, необходимо рассмотреть конструктивные особенности каждого типа моторов и понять принцип их работы.
Асинхронный электродвигатель
Итак, надо начать с рассмотрения конструкции асинхронной модели. Основное отличие от синхронной – это наличие трех обмоток в статоре, концы которых выводятся для подключения в клеммную коробку. Вторая основная часть мотора – ротор цельного типа, торцы которого замыкаются между собой, отсюда, в принципе, и название – короткозамкнутый.
Дополнением конструкции является крыльчатка, с помощью которой охлаждается двигатель. Устанавливается крыльчатка на вал (ротор) электрического мотора. Сам ротор держится и вращается в подшипниках, установленных в двух крышках корпуса. Обратите внимание, что именно подшипники и являются самым уязвимым местом агрегата. Именно они чаще всего выходят из строя. Правда, заменить их не очень сложно.
Принцип работы
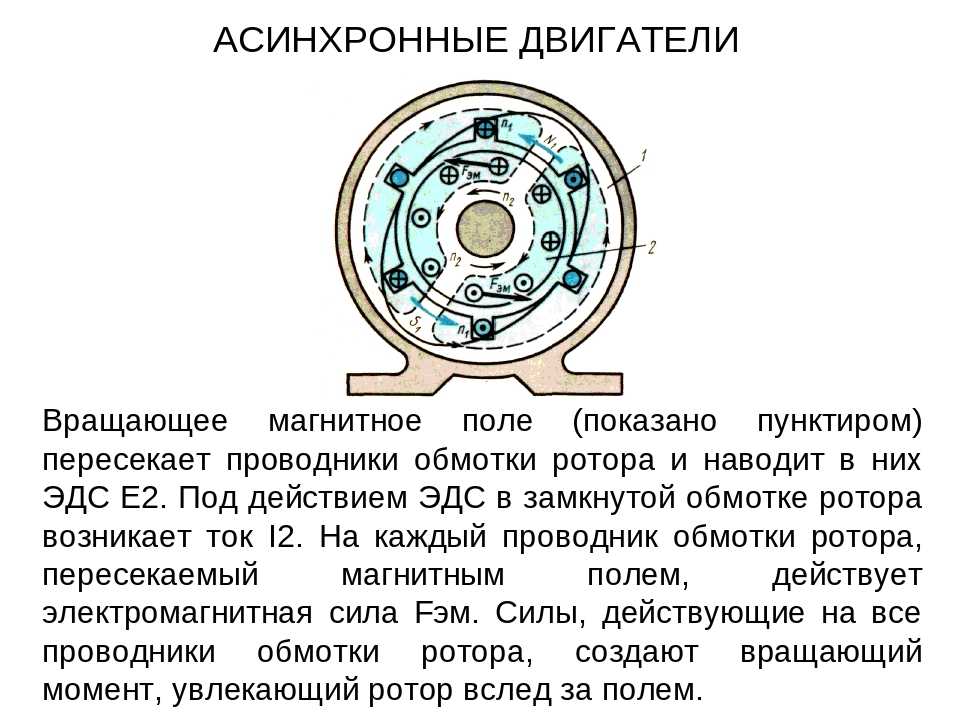
По какому принципу работает асинхронный двигатель? Внутри корпуса мотора, где расположены обмотки статора, возникает магнитное поле, которое действует на ротор, заставляя его вращаться под действием возникшей электродвижущей силы.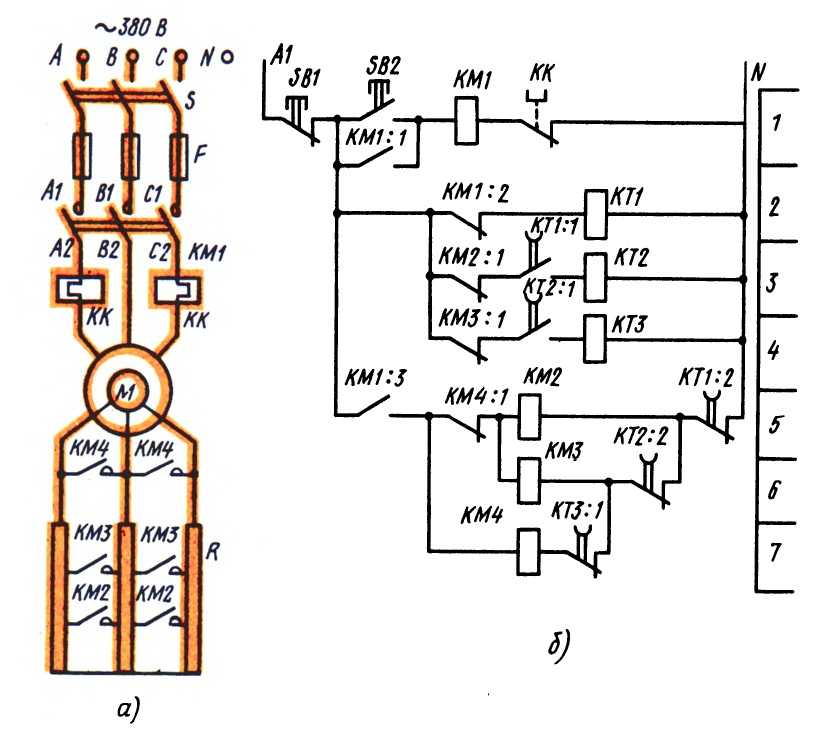
Но в любом случае этого произойти не может, потому что здесь несколько причин, сдерживающих скорость вращения ротора.
- Трение в подшипниках.
Но самое главное, что магнитные полюса в асинхронном двигателе постоянно меняются, что влияет на смену направлений тока в статоре электродвигателя. То есть, в определенное время ток начинает вращаться «на нас», а в следующий промежуток «от нас». Именно поэтому такие двигатели называются асинхронными, у них просто нет стабильного направления тока.
Что касается скорости вращения ротора, то тут необходимо сделать одно замечание. Этот показатель будет зависеть от того, сколько полюсов одномоментно подключено к питанию. К примеру, максимальная скорость вращения вала будет при двух подключенных полюсах. Чтобы снизить данный показатель, необходимо добавить еще два полюса, то есть, увеличить их вдвое.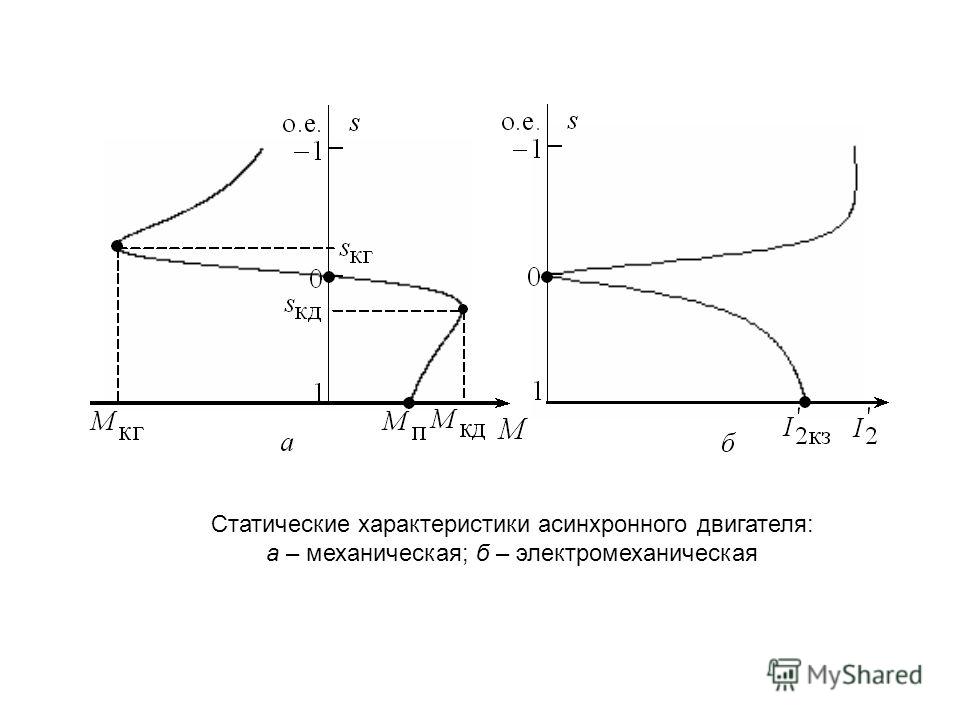
И еще один недостаток. Асинхронные двигатели при работе обладают разной скоростью вращения вала. К примеру, на холостом ходу это может быть одна величина, при нагрузке она резко снижается. По сути, получается так, что изменение частоты тока влияет на скорость вала. Другого способа изменить скорость вращения не существует.
Синхронный электродвигатель
Итак, синхронный электродвигатель – это мотор с постоянной скоростью вращения ротора, плюс возможность регулировать эту скорость. Устройство синхронного мотора достаточно сложное. Чтобы в нем разобраться, необходимо рассмотреть фотографию ниже.
Здесь четко показано, что обмотки двигателя располагаются на якоре или роторе агрегата. Концы обмоток выведены и закреплены на токосъемное кольцо, а, точнее, к его секторам. Сам же ток подается на это же кольцо только через графитовые щетки, которые подключены к питающей сети.
Внимание! Концы обмоток подключаются таким образом, что при работе мотора через щетки электрический ток попадал всегда только на одну пару.
У двигателя этой модели больше уязвимых мест, чем у асинхронной.
- Снашиваются графитные щетки.
- Плохой контакт между токосъемным кольцом и щетками за счет ослабления пружины, которая прижимает последние к кольцу (коллектору).
- Изнашиваются подшипники.
Теперь переходим к другой позиции – принцип работы синхронного электродвигателя. Вращающийся момент внутри мотора образуется за счет взаимодействия магнитного поля, которое образуется в обмотках возбуждения, и тока, проходящего по якорю агрегата. Но тут есть один момент – изменяющееся направление тока (переменного) будет менять и направление вращения магнитного поля двигателя. Правда, смена вращения будет меняться и в корпусе аппарата, и на якоре одновременно. Вот почему вращение ротора мотора всегда происходит с одинаковой скоростью.
Именно поэтому изменить эту величину можно лишь тем, если изменить напряжение подаваемой на щетки электроэнергии.
Но синхронные электродвигатели в промышленности своего основного места не нашли. Здесь в основном используются асинхронные модели.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным. К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо. А его выход из строя – это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое.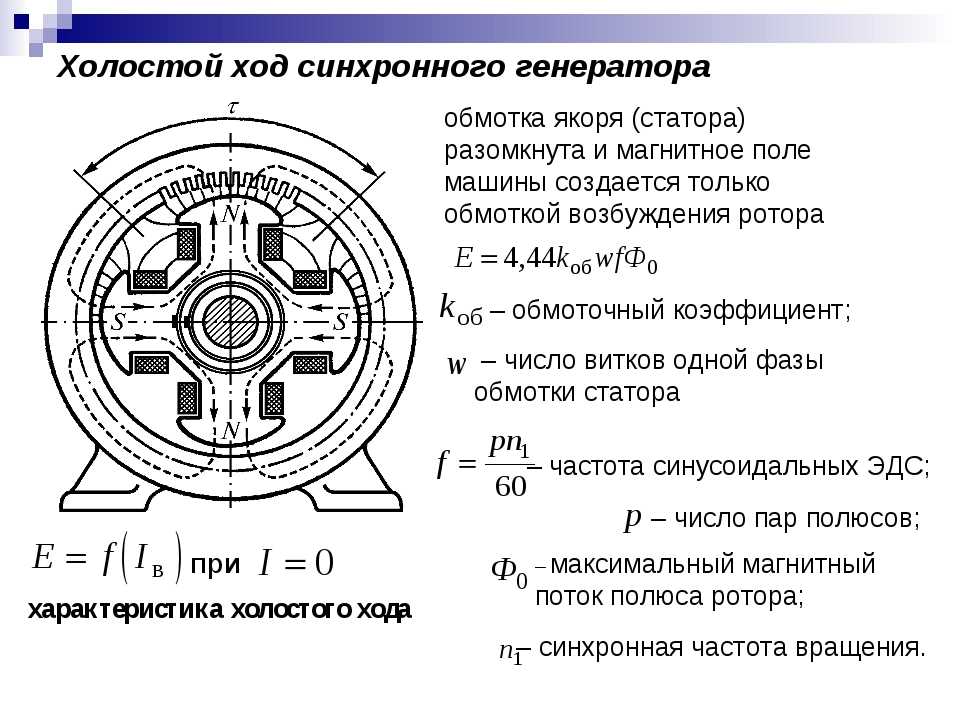 Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя.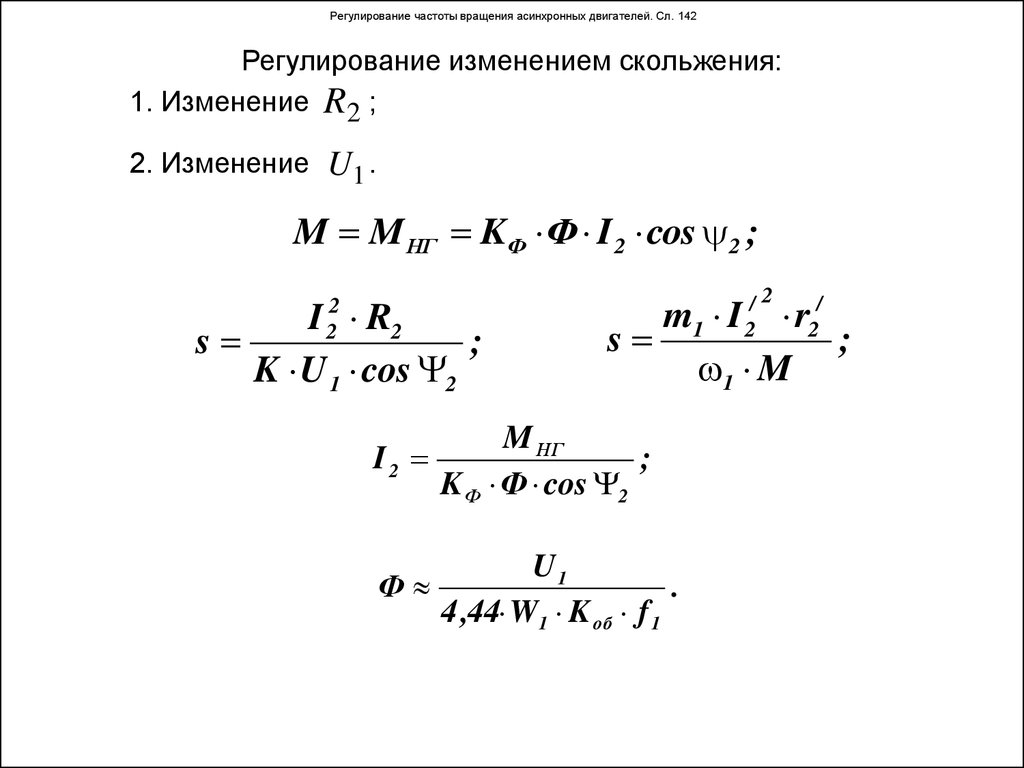 По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.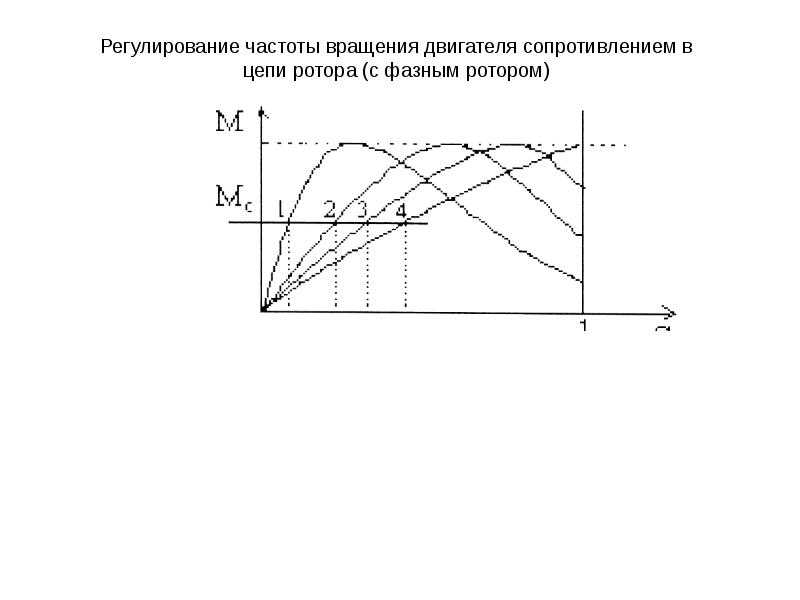
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление R добав.
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.
Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).
Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.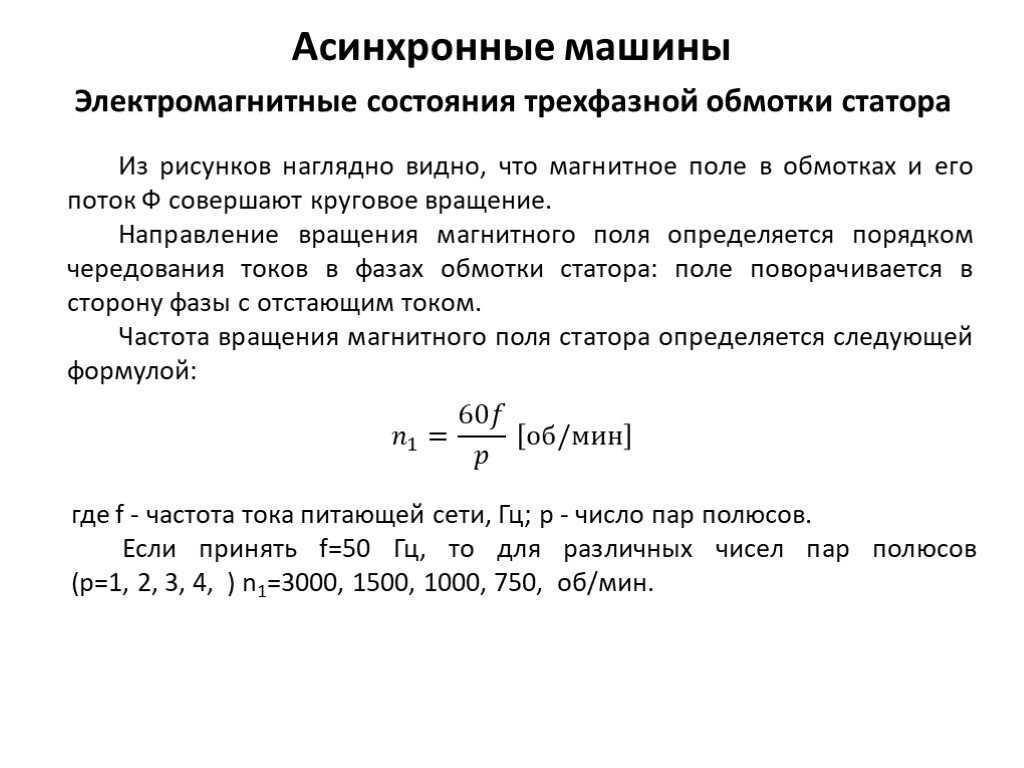
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.
Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.
Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Номинальные частоты вращения электрических машин
1. Номинальные частоты вращения генераторов и двигателей постоянного тока должны соответствовать указанным в табл.1
| Таблица 1 Номинальные частоты вращения машин постоянного тока | ||
|---|---|---|
| Номинальная частота вращения, об/мин | Генераторы | Двигатели |
| 25 | — | X |
| 50 | — | X |
| 75 | — | X |
| 100 | — | X |
| 125 | — | X |
| 150 | — | X |
| 200 | — | X |
| 300 | — | X |
| 400 | X | X |
| 500 | X | X |
| 600 | X | X |
| 750 | X | X |
| 1000 | X | X |
| 1500 | X | X |
| (2200) | (X) | (X) |
| 3000 | X | X |
| 4000 | X | X |
| (5000) | (X) | (X) |
| 6000 | X | X |
| 7500 | X | X |
| 10000 | X | X |
| 12500 | X | X |
| 15000 | X | X |
| 20000 | — | X |
| 30000 | — | X |
| 40000 | — | X |
| 60000 | — | X |
Примечания:
1. Номинальные частоты вращения генераторов постоянного тока, когда их приводными двигателями являются асинхронные двигатели, могут быть меньше указанных в таблице на частоту вращения, определяемую величиной номинального скольжения приводного двигателя.
Номинальные частоты вращения генераторов постоянного тока, когда их приводными двигателями являются асинхронные двигатели, могут быть меньше указанных в таблице на частоту вращения, определяемую величиной номинального скольжения приводного двигателя.
2. Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
3. Допускается применение номинальных частот вращения, отличных от указанных в таблице, для двигателей, предназначенных для привода шахтного подъема и механизмов металлургического производства, для генераторов с Непосредственным приводом от авиационных и автомобильных двигателей.
4. Номинальные частоты вращения двигателей, предназначенных для работы в электроприводе механизмов металлургических агрегатов и на подъемнотранспортных механизмах, должны соответствовать ГОСТ 184-61, малогабаритных автотракторных электродвигателей — ГОСТ 9443-67.
2. Номинальные частоты вращения электрических машин переменного тока (до 15 000 об/мин) при частотах тока, предусмотренных ГОСТ 6697-67 в диапазоне от 50 до 1000 Гц, должны соответствовать: для синхронных двигателей и генераторов — указанным в табл. 2, для асинхронных трехфазных, двухфазных и однофазных двигателей — указанным в табл. 3.
2, для асинхронных трехфазных, двухфазных и однофазных двигателей — указанным в табл. 3.
3. Номинальные частоты вращения электрических машин переменного тока при частотах тока, предусмотренных ГОСТ 6697-67 в диапазоне до 25 Гц, должны соответствовать синхронным частотам вращения, получающимся в результате исполнения электрических машин с числом полюсов:
- 2 и 4 для синхронных генераторов и двигателей;
- 2, 4, 6 и 8 для асинхронных двигателей (трех-, двух- и однофазных).
4. Применение номинальных частот вращения, отличных от указанных в пп. 2 и 3, допускается:
- для электрических машин переменного тока на частоты, отличающиеся от стандартных в технически обоснованных случаях;
- для генераторов переменного тока с непосредственным приводом от авиационных двигателей;
- для двигателей магнитной записи и аппаратуры связи, применяемых в системах автономной синхронизации.
| Таблица 2 Номинальные частоты вращения синхронных машин | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Номинальная частота вращения, об/мин | Синхронные двигатели (Д) и генераторы (Г) частоты, Гц | |||||||||
| 50 | 100 | 200 | 400 | 1000 | ||||||
| Д | Г | Д | Г | Д | Г | Д | Г | Д | Г | |
| 100 | X | — | — | — | — | — | — | — | — | — |
| 125 | X | X | — | — | — | — | — | — | — | — |
| 150 | X | X | — | — | — | — | — | — | — | — |
| 166,6 | X | — | — | — | — | — | — | — | — | — |
| 187,5 | X | X | — | — | — | — | — | — | — | — |
| 214,3 | — | X | — | — | — | — | — | — | — | — |
| 250 | X | X | — | — | — | — | — | — | — | — |
| 300 | X | X | — | — | — | — | — | — | — | — |
| 375 | X | X | — | — | — | — | — | — | — | — |
| 428,6 | — | X | — | — | — | — | — | — | — | — |
| 500 | X | X | — | — | — | — | — | — | — | — |
| 600 | X | X | — | — | — | — | — | — | — | — |
| 750 | X | X | — | — | — | — | — | — | — | — |
| 1000 | X | X | — | X | — | — | — | — | — | — |
| 1500 | X | X | — | X | — | X | (X) | X | — | X |
| 3000 | X | X | X | X | — | X | (X) | X | (X) | X |
| 4 000 | — | — | — | — | (X) | — | (X) | — | (X) | — |
| 6000 | — | — | X | X | X | X | X | X | X | — |
| 8000 | — | — | — | — | — | X | X | — | — | — |
| 10000 | — | — | — | — | — | — | — | X | — | — |
| 12000 | — | — | — | — | X | X | X | X | X | — |
| 15000 | — | — | — | — | — | — | — | X | — | — |
Примечания:
1. Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
2. Для гидрогенераторов с частотой 50 Гц и мощностью свыше 10 000 кВт допускается применение номинальных частот вращения ниже 125 об/мин.
| Таблица 3 Номинальные частоты вращения асинхронных электродвигателей | |||||
|---|---|---|---|---|---|
| Номинальная частота вращения (синхронная), об/ мин | Асинхронные двигатели частоты, Гц | ||||
| 50 | 100 | 200 | 400 | 1000 | |
| 100 | (X) | — | — | — | — |
| 125 | (X) | — | — | — | — |
| 150 | (X) | — | — | — | — |
| 166,6 | (X) | — | — | — | — |
| 187,5 | (X) | — | — | — | — |
| 250 | X | — | — | — | — |
| 300 | X | — | — | — | — |
| 375 | X | — | — | — | — |
| 500 | X | — | — | — | — |
| 600 | X | — | — | — | — |
| 750 | X | — | — | — | — |
| 1000 | X | — | — | — | — |
| 1500 | X | — | — | (X) | — |
| 3000 | X | X | — | (X) | (X) |
| 4000 | — | — | — | (X) | (X) |
| 6000 | — | X | X | X | (X) |
| 8000 | — | — | — | X | — |
| 10000 | — | — | — | — | X |
| 12000 | — | — | X | X | X |
| 15000 | — | — | — | — | X |
Примечания:
1. Номинальные частоты вращения, заключенные в скобках, применять не рекомендуется.
Номинальные частоты вращения, заключенные в скобках, применять не рекомендуется.
2. Номинальные асинхронные частоты вращения могут быть меньше указанных в таблице на частоту вращения, определяемую величиной номинального скольжения.
5. Номинальное скольжение асинхронных трехфазных электродвигателей с нормальным, скольжением должно быть (в процентах синхронной скорости вращения) не более:
При мощности двигателя от 0,1 до 0,6 кВт ………..10
То же свыше 0,6 до 2,2 кВт ………………………….. 7
То же свыше 2,2 до 10 кВт …………………………… 5,5
То же свыше 10 кВт ……………………………………. 3,5
Номинальное скольжение асинхронных трехфазных двигателей мощностью до 0,1 кВт, асинхронных двухфазных, однофазных и двигателей с повышенным скольжением стандартом не устанавливается.
6. Номинальные частоты вращения универсальных коллекторных двигателей должны быть следующие: 2700; 5000; 6000; 8000; 12 000; 14 000 об/мин.
7. Допускаемые отклонения от номинальной частоты вращения могут составлять 0,001-5% номинальной частоты вращения и регламентируются ГОСТ 10683-63 для конкретных видов электрических машин и в зависимости от частоты тока.
8. Номинальные частоты вращения электрических машин специального исполнения (электродвигателей для привода гребных винтов; возбудителей; шаговых; импульсных; тяговых и др.; электрогенераторов автотракторных; для взрывных работ и др.) должны соответствовать стандартам или техническим условиям на эти машины и могут отличаться от указанных в данном параграфе.
Все страницы раздела на websor
2.2. Расчет синхронной частоты вращения
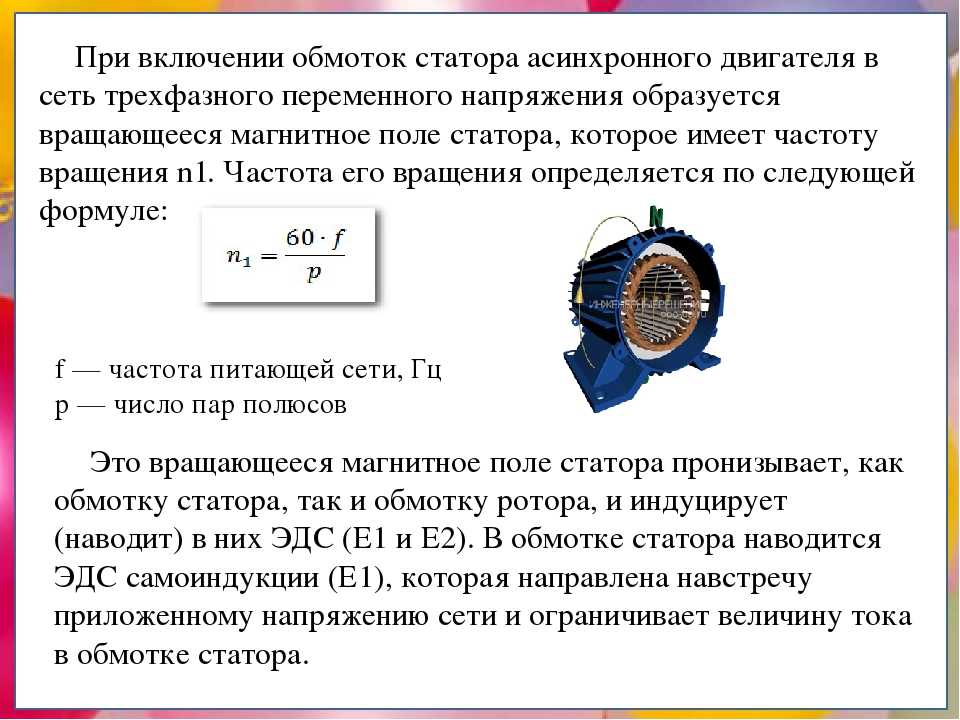
При питании обмотки статора трехфазным током создается вращающееся магнитное поле, частота вращения которого
(об/мин), (2.1)
где f1 – частота питающего напряжения, p — число пар полюсов. Поскольку номинальная
частота вращения ротора асинхронных
двигателей близка к синхронной частоте,
т.е. частоте вращения магнитного поля,
то ее значение выбирается ряда синхронных
частот вращения (3000; 1500; 1000; 750… об/мин)
наиболее близких номинальной частоте.
Если n2 = 2979 об/мин, то синхронная частота вращения n1 = 3000 об/мин.
2.3. Расчет номинального скольжения
Скольжение вычисляется по следующей формуле:
. (2.2.)
Расчет номинального и критического момента двигателя
Номинальный момент двигателя рассчитывается по формуле
. (2.3)
Тогда критический момент будет равен
(2.4.)
Расчет критического скольжения
Критическое скольжение найдем из уравнения Клосса после подстановки в него номинального скольжения и момента
. (2.5)
Выражая критическое скольжение через кратность номинального момента λ, получим уравнение для вычисления критического скольжения
. (2.6)
(2.6)
Расчет параметров Г – образной схемы замещения
асинхронного двигателя
Расчет параметров схемы замещения (рисунок 2.1)будем проводить в предположении равенства активных и индуктивных сопротивлений статора и ротора
(2.7.)
Рисунок 2.1 Г – образная схема замещения асинхронного двигателя.
Из уравнения для критического скольжения
(2.8)
найдем для двигательного режима, что
(2.9)
Знак «+» относится к двигательному режиму, знак «-» к генераторному.
Подставим полученное выражение в уравнение для критического момента
, (2.10)
тогда
. (2.11)
Откуда для двигательного режима
(2. 12)
12)
Подставляя полученные значения R1 и R’ 2 в (2.9) найдем индуктивное сопротивление короткого замыкания xk
. (2.13)
Учитывая (2.7) найдем индуктивные сопротивления статора и ротора
(2.14)
Векторная диаграмма асинхронного двигателя строится аналогично векторной диаграмме трансформатора.
2.7.1 Расчет полного сопротивления двигателя.
,
где — полные сопротивления статора и ротора.
2.7.2 Расчет тока статора и ротора
.
2.7.3 Расчет э.д.с. двигателя Е1, Е’ 2
.
2.7.4 Расчет падения напряжения на активном сопротивлении статора обмотки
.
2.7.5 Расчет падения напряжения на реактивном сопротивлении статора
.
2.7.6 Расчет падения напряжения на активном сопротивлении ротора
.
Расчет падения напряжения на реактивном сопротивлении ротора
.
Результаты вычислений заносятся в таблицу 2.2
Таблица 2.2
Напряжения и токи | |||||||||
U1 | E1 | UR1 | UX1 | UR2 | UX2 | I1 | |||
В | В | В | В | В | В | В | |||
Сопротивления | |||||||||
R1 | R’ 2 | X1 | X’ 2 | Z | |||||
Ом | Ом | Ом | Ом | Ом | |||||
По данным таблицы
9 и комплексным уравнениям асинхронного
двигателя строим его векторную диаграмму
показанную на рисунке 8.
(2.22)
По данным таблицы 2.2. и комплексным уравнениям асинхронного двигателя строим его векторную диаграмму показанную на рисунке 2.2
Рисунок 2.2. Векторная диаграмма асинхронного двигателя.
Является ли номинальная скорость асинхронного двигателя синхронной скоростью?
Задавать вопрос
Спросил
Изменено 5 лет, 3 месяца назад
Просмотрено 25 тысяч раз
\$\начало группы\$
Например, если двигатель рассчитан на 50 Гц, 400 В, 22 А, 8,29 кВт и 1460 об/мин, означает ли это, что двигатель должен работать от источника с напряжением 50 Гц, и это соответствует синхронной скорости двигателя 1460 об/мин?
Причина, по которой я спрашиваю, заключается в том, что пример вопроса и ответа, который я видел, говорит следующее:
Q: Оцените количество полюсов описанного выше двигателя
A: формула для синхронной скорости: n=120f/p
ближайшая синхронная скорость для данного ротора составляет 1500 об/мин
1500=120*50/p
p=4
Я предполагаю, что они округлили 1460 до 1500 потому, что число полюсов должно быть целым числом.
Итак, когда вы видите двигатель с номинальной скоростью в об/мин, что на самом деле означает это значение? И как это связано с синхронной скоростью (как в моем примере вопроса)?
Спасибо!
- асинхронный двигатель
\$\конечная группа\$
2
\$\начало группы\$
Здесь вы видите асинхронный (асинхронный) двигатель. Отличие от синхронного заключается в том, что ротор обычно представляет собой (беличью) клетку и немного железа.
Для синхронного двигателя ротор имеет либо магнит, либо геометрически строго определенные (явнозаметные) полюса и зазоры между полюсами. Иногда бывает и то, и другое!
Теперь почему один синхронный, а другой асинхронный?
- Синхронный двигатель имеет постоянное возбуждение в роторе (или имеет постоянную разность индуктивностей). Поэтому поле вращается синхронно с ротором.
 $$f_{ротор}=0$$
$$f_{ротор}=0$$ - Асинхронный двигатель с другой стороны имеет индуцированное поле в роторе, которое зависит от скорости вращения. $$f_{ротор}>0$$
 $$f_{ротор}=0$$
$$f_{ротор}=0$$Скорость вращения рассчитывается по разнице частот потоков статора и ротора.
Почему скорость 1460? Стабильная часть характеристики момента/скорости вращения для асинхронного двигателя близка к синхронной скорости. Если вы хотите найти количество полюсов, округлите его до ближайшей синхронной скорости вращения и вычислите его в обычном режиме. В некоторых специальных режимах работы это не так, так как асинхронный двигатель может работать, например, со скоростью 900 оборотов, если вы сделаете некоторые настройки. Однако в вашем случае он будет иметь p=4 .
Почитайте статьи в Википедии или погуглите про асинхронные и синхронные двигатели.
\$\конечная группа\$
\$\начало группы\$
Асинхронный двигатель никогда не вращается с синхронной скоростью.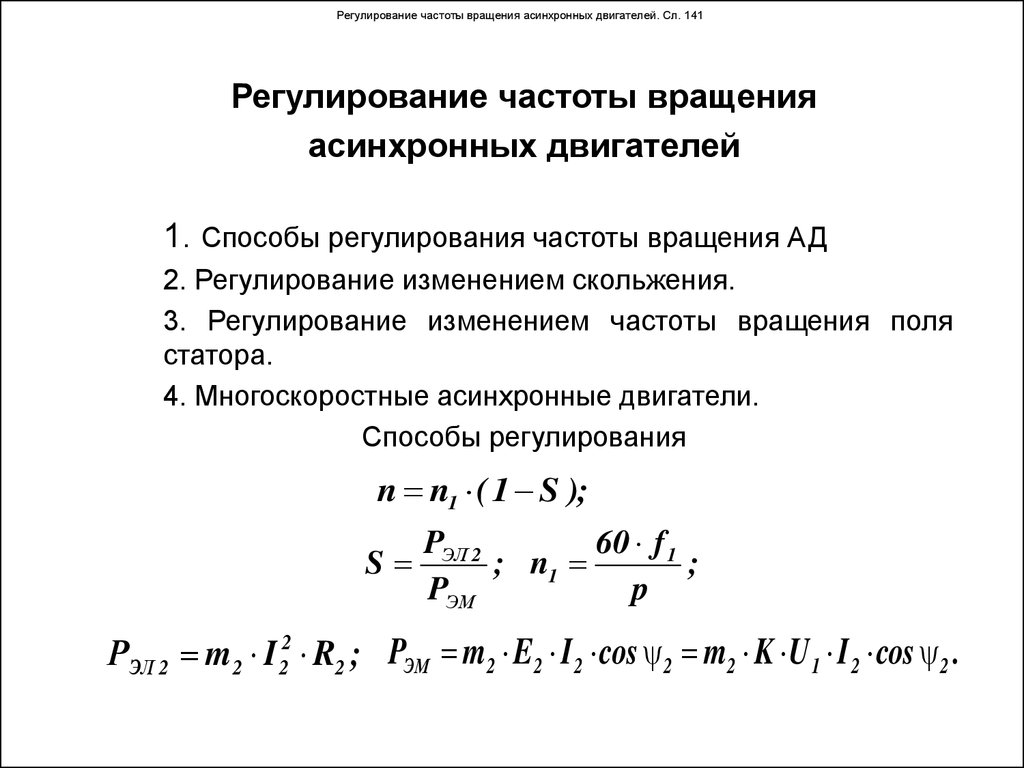
Двигатель, вращающийся с постоянной скоростью, должен создавать ускоряющий момент, достаточный для преодоления тормозящего момента нагрузки. Поскольку асинхронный двигатель должен проскальзывать, чтобы обеспечить крутящий момент, скорость при полной нагрузке всегда будет меньше синхронной скорости.
Даже ненагруженный двигатель, на валу которого ничего нет, имеет тормозящий момент из-за трения подшипников и т.д.
Таким образом, имеем:
Номинальная скорость — скорость двигателя при номинальной выходной мощности (на валу).
Скорость холостого хода — скорость двигателя без нагрузки на валу. Обратите внимание, что подшипники двигателя по-прежнему создают номинальную нагрузку из-за трения.
Синхронная скорость — это скорость, с которой двигатель вращался бы при абсолютно нулевой нагрузке (подшипники качения и никаких других потерь).
Связанный: Что означает скорость регулирования?
Для справки, вот типичный график характеристик двигателя.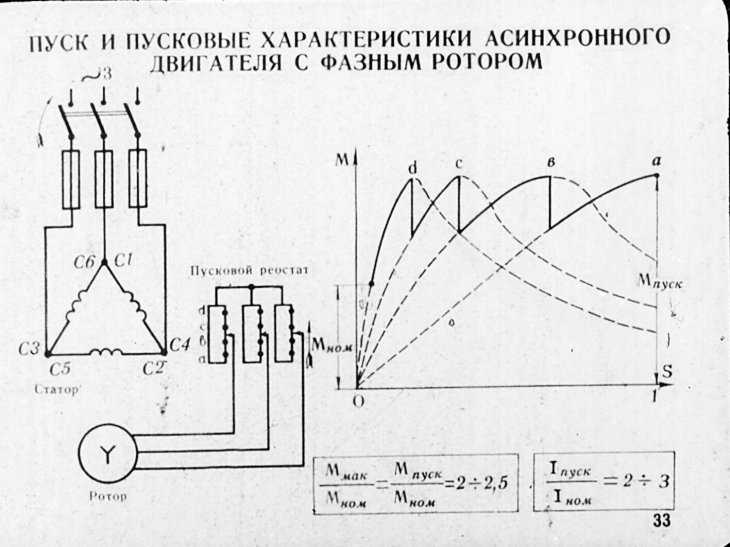
Обратите внимание на синхронную скорость 3000 об/мин, скорость без нагрузки также около 3000 об/мин и скорость при полной нагрузке 2932 об/мин.
\$\конечная группа\$
2
\$\начало группы\$
В асинхронном двигателе синхронная скорость (Ns) — это просто число, которое можно рассчитать по определенной формуле: Ns=120*f(частота подаваемого напряжения)/полюс. Но Номинальная рабочая скорость двигателя будет указана в об/мин (оборотов в минуту) и представляет собой скорость, с которой двигатель будет вращаться при выработке номинальной мощности и подаче номинального напряжения.
Это значение будет немного меньше синхронной скорости двигателя из-за снижения скорости при добавлении нагрузки. На приведенной табличке указана номинальная скорость 1460 об/мин для этого 4-полюсного двигателя с частотой 50 Гц. Синхронная скорость 1500 об/мин.
\$\конечная группа\$
1
Твой ответ
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Ответы на семь общих вопросов о работе генераторов и двигателей
Вращающееся оборудование настолько распространено, но так неправильно понимается, что даже очень опытные электрики и инженеры часто сталкиваются с вопросами об их работе. В этой статье мы ответим на семь наиболее часто задаваемых вопросов. Объяснения краткие и практичные из-за ограниченного места; тем не менее, они позволят вам лучше понять это оборудование.
Вопрос №1: Якорь, поле, ротор, статор: что есть что?
Статор по определению состоит из всех невращающихся электрических частей генератора или двигателя. Также по определению ротор включает в себя все вращающиеся электрические части.
Поле машины — это часть, которая создает прямое магнитное поле. Ток в поле не переменный. Обмотка якоря — это та, которая генерирует или имеет приложенное к ней переменное напряжение.
Обычно термины «якорь» и «поле» применяются только к генераторам переменного тока, синхронным двигателям, двигателям постоянного тока и генераторам постоянного тока.
Генераторы переменного тока . Поле синхронного генератора представляет собой обмотку, на которую подается постоянный ток возбуждения. Якорь – это обмотка, к которой подключена нагрузка. В малых генераторах обмотки возбуждения часто находятся на статоре, а обмотки якоря — на роторе. Однако большинство больших машин имеют вращающееся поле и неподвижный якорь.
Синхронный двигатель практически идентичен синхронному генератору. Таким образом, якорь — это статор, а поле — это ротор.
Машины постоянного тока . В машинах постоянного тока, как двигателях, так и генераторах, ротором является якорь, а статором — поле. Поскольку якорь всегда является ротором в машинах постоянного тока, многие электрики и инженеры ошибочно полагают, что ротором всех двигателей и генераторов является якорь.
Вопрос № 2: Я ослабил натяжение пружины на щетках, но они по-прежнему изнашиваются слишком быстро. Почему?
Износ щеток происходит по двум основным причинам: механическое трение и электрический износ.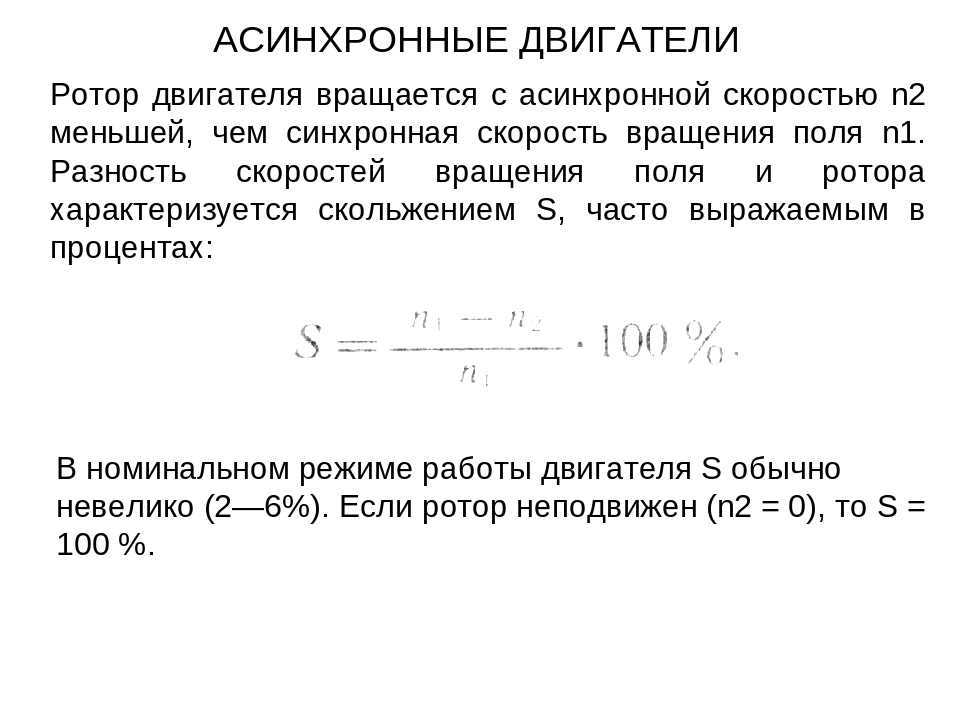 Механическое трение вызывается трением щеток о коллектор или контактное кольцо. Электрический износ вызван искрением и искрением щетки, когда она движется по коллектору. Механическое трение увеличивается с давлением щетки; Электрический износ уменьшается с давлением щетки.
Механическое трение вызывается трением щеток о коллектор или контактное кольцо. Электрический износ вызван искрением и искрением щетки, когда она движется по коллектору. Механическое трение увеличивается с давлением щетки; Электрический износ уменьшается с давлением щетки.
Для любой установки щетки существует оптимальное давление щетки. Если давление снижается ниже этой величины, общий износ увеличивается, поскольку увеличивается электрический износ. Если давление увеличивается выше оптимального значения, общий износ снова увеличивается из-за увеличения механического трения.
Всегда следите за тем, чтобы давление щетки было установлено на уровне, рекомендованном производителем. Если износ по-прежнему чрезмерный, следует изучить тип и размер используемой щетки. Помните, что плотность тока (ампер на квадратный дюйм щетки) должна соответствовать применению. Надлежащая плотность тока необходима для того, чтобы на коллекторе или контактном кольце образовалась смазочная проводящая пленка.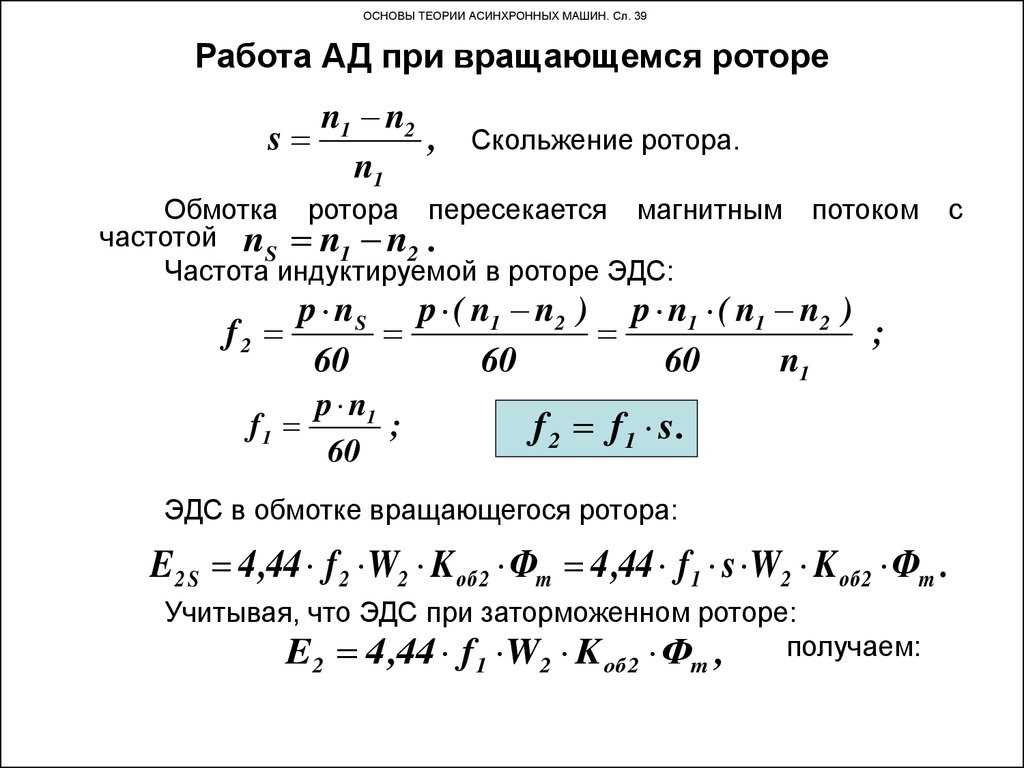 Эта пленка состоит из влаги, меди и углерода. Недостаточная плотность тока препятствует образованию этой пленки и может привести к чрезмерному износу щеток.
Эта пленка состоит из влаги, меди и углерода. Недостаточная плотность тока препятствует образованию этой пленки и может привести к чрезмерному износу щеток.
Кроме того, среда с очень низкой влажностью не обеспечивает достаточного количества влаги для образования смазочной пленки. Если в такой среде возникает проблема чрезмерного износа щеток, возможно, вам придется увлажнить место, где работает машина.
Вопрос № 3: Что такое сервис-фактор?
Эксплуатационный коэффициент — это нагрузка, которая может быть приложена к двигателю без превышения допустимых значений. Например, если двигатель мощностью 10 л.с. имеет эксплуатационный фактор 1,25, он будет успешно развивать мощность 12,5 л.с. (10 x 1,25) без превышения заданного повышения температуры. Обратите внимание, что при таком приводе выше номинальной нагрузки двигатель должен питаться с номинальным напряжением и частотой.
Однако имейте в виду, что двигатель мощностью 10 л.с. с коэффициентом эксплуатации 1,25 не является двигателем мощностью 12,5 л. с. Если двигатель мощностью 10 л.с. будет постоянно работать при мощности 12,5 л.с., срок службы его изоляции может сократиться на две трети от нормального. Если вам нужен двигатель мощностью 12,5 л.с., купите его; эксплуатационный коэффициент следует использовать только для кратковременных условий перегрузки.
с. Если двигатель мощностью 10 л.с. будет постоянно работать при мощности 12,5 л.с., срок службы его изоляции может сократиться на две трети от нормального. Если вам нужен двигатель мощностью 12,5 л.с., купите его; эксплуатационный коэффициент следует использовать только для кратковременных условий перегрузки.
Вопрос № 4: Что такое вращающееся магнитное поле и почему оно вращается?
Вращающееся магнитное поле — это поле, северный и южный полюса которого движутся внутри статора, как если бы внутри машины вращался стержневой магнит или магниты.
Посмотрите на статор трехфазного двигателя, показанный на прилагаемой схеме. Это двухполюсный статор с тремя фазами, расположенными с интервалом 120 [градусов]. Ток от каждой фазы входит в катушку на одной стороне статора и выходит через катушку на противоположной стороне. Таким образом, если одна из катушек создает магнитный северный полюс, другая катушка (для той же фазы) создаст магнитный южный полюс на противоположной стороне статора.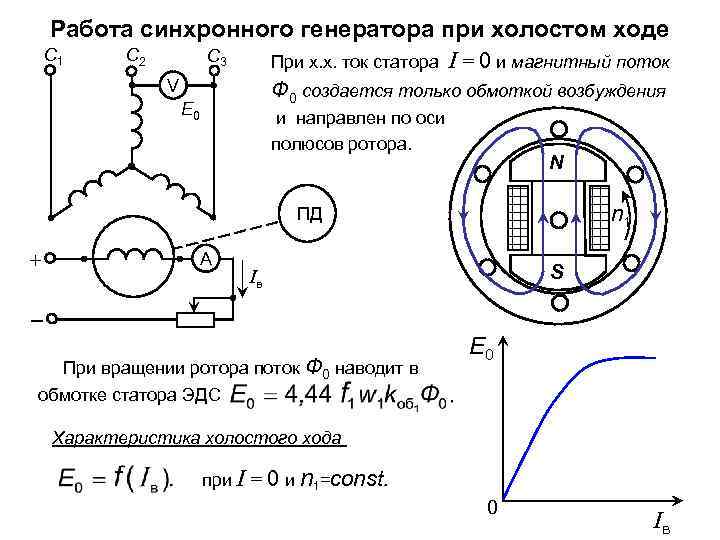
В Позиции 1 фаза B создает сильный северный полюс вверху слева и сильный южный полюс внизу справа. А-фаза создает более слабый северный полюс внизу слева и более слабый южный полюс внизу. C-фаза создает общее магнитное поле с северным полюсом в левом верхнем углу и южным полюсом в правом нижнем углу.
В Позиции 2 фаза А создает сильный северный полюс внизу слева и сильный южный полюс вверху справа; таким образом, сильные полюса повернулись на 60 [градусов] против часовой стрелки. (Обратите внимание, что это магнитное вращение на 60 [градусов] точно соответствует электрическому изменению фазных токов на 60 [градусов].) Слабые полюса также повернулись на 60 [градусов] против часовой стрелки. Фактически это означает, что общее магнитное поле повернулось на 60 [градусов] от положения 1. фаз изменяется более чем на 60 электрических градусов. Анализ позиций 3, 4, 5 и 6 показывает, что магнитное поле продолжает вращаться.
Скорость, с которой вращается магнитное поле, называется синхронной скоростью и описывается следующим уравнением:
S = (f x P) / 120, где S = скорость вращения в оборотах в минуту f = частота подаваемого напряжения (Гц ) P = число магнитных полюсов во вращающемся магнитном поле
Если бы в этот статор был помещен постоянный магнит с валом, который позволял бы ему вращаться, его толкали бы (или тянули) вперед с синхронной скоростью. Точно так же работает синхронный двигатель, за исключением того, что магнитное поле ротора (поля) создается электромагнетизмом, а не постоянным магнитом.
Точно так же работает синхронный двигатель, за исключением того, что магнитное поле ротора (поля) создается электромагнетизмом, а не постоянным магнитом.
Ротор асинхронного двигателя состоит из короткозамкнутых обмоток, и в обмотках ротора индуцируется ток, когда вращающееся магнитное поле пересекает их. Этот ток создает поле, противодействующее вращающемуся полю. В результате ротор толкается (или притягивается) вращающимся полем. Обратите внимание, что ротор асинхронного двигателя не может вращаться с синхронной скоростью, поскольку вращающееся поле должно прорезать обмотки ротора, чтобы создать крутящий момент. Разница между синхронной скоростью и фактической скоростью вращения ротора называется процентным скольжением; она выражается в процентах.
Однофазные двигатели также имеют вращающееся магнитное поле. Вращающееся поле, необходимое для запуска двигателя, создается второй обмоткой, называемой пусковой обмоткой. После разгона двигателя пусковая обмотка отключается, и вращающееся поле создается за счет взаимодействия основной обмотки статора и ротора.
Вопрос № 5: Как работает асинхронный генератор?
Асинхронный генератор по конструкции идентичен асинхронному двигателю. Обмотки статора подключены к трехфазной системе питания, и три фазы создают вращающееся магнитное поле. Ротор асинхронного генератора вращается первичным двигателем, который вращается быстрее синхронной скорости. Когда обмотки ротора пересекают вращающееся поле, в них индуцируется ток. Этот индуцированный ток создает поле, которое, в свою очередь, прорезает обмотки статора, создавая выходную мощность для нагрузки.
Таким образом, асинхронный генератор получает питание от энергосистемы, к которой он подключен. Асинхронный двигатель должен иметь синхронные генераторы, подключенные к его статору, чтобы начать генерировать. После того, как асинхронный генератор работает, конденсаторы могут использоваться для питания возбуждения.
Вопрос № 6: Почему подшипники генератора и двигателя изолированы?
Магнитное поле внутри двигателя или генератора не совсем однородно.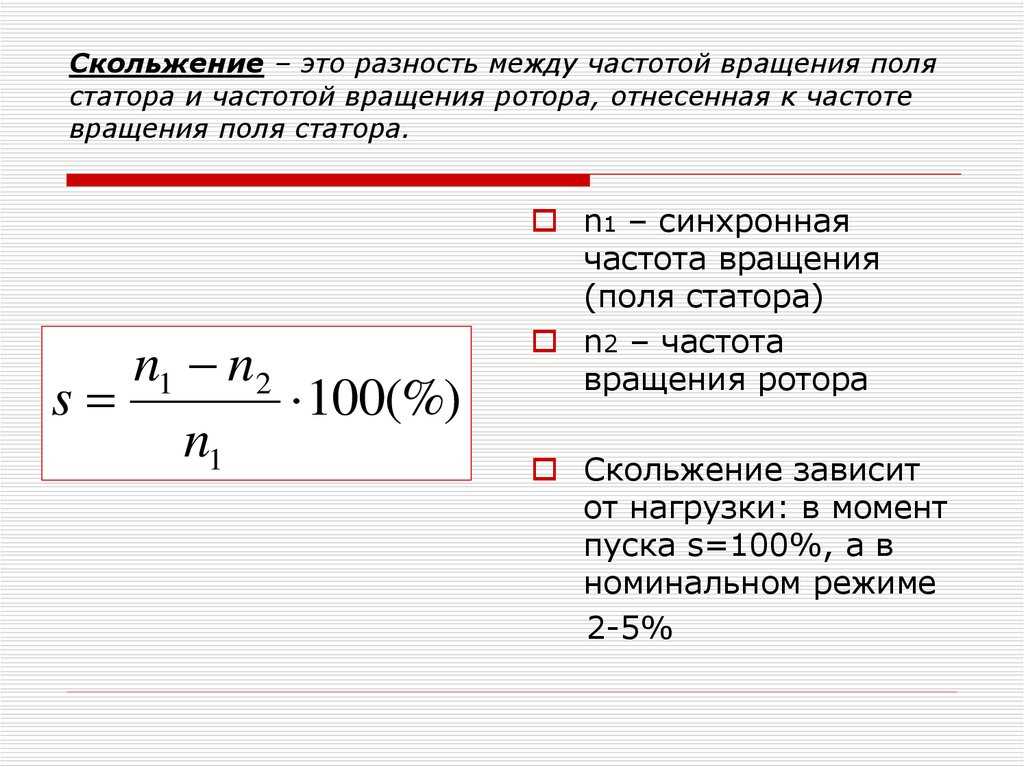 Таким образом, при вращении ротора на валу в продольном направлении (непосредственно вдоль вала) возникает напряжение. Это напряжение вызовет протекание микротоков через смазочную пленку на подшипниках. Эти токи, в свою очередь, могут вызвать незначительное искрение, нагрев и, в конечном итоге, выход из строя подшипника. Чем больше машина, тем хуже становится проблема.
Таким образом, при вращении ротора на валу в продольном направлении (непосредственно вдоль вала) возникает напряжение. Это напряжение вызовет протекание микротоков через смазочную пленку на подшипниках. Эти токи, в свою очередь, могут вызвать незначительное искрение, нагрев и, в конечном итоге, выход из строя подшипника. Чем больше машина, тем хуже становится проблема.
Чтобы избежать этой проблемы, корпус подшипника со стороны ротора часто изолируется от стороны статора. В большинстве случаев будет изолирован по крайней мере один подшипник, обычно самый дальний от первичного двигателя для генераторов и самый дальний от нагрузки для двигателей. Иногда оба подшипника изолированы.
Вопрос № 7: Как генераторы переменного тока регулируют переменную, напряжение и мощность?
Хотя элементы управления генератором взаимодействуют, верны следующие общие положения.
- Выходная мощность генератора контролируется его первичным двигателем.
- Вклад напряжения и/или реактивной мощности генератора контролируется уровнем тока возбуждения.
Например, предположим, что к выходу генератора подключена дополнительная нагрузка. Добавленный поток тока увеличит силу магнитного поля якоря и заставит генератор замедлиться. Чтобы поддерживать частоту, регулятор генератора увеличивает мощность, подводимую к первичному двигателю. Таким образом, дополнительная мощность, необходимая для генератора, регулируется вводом первичного двигателя.
В нашем примере чистый магнитный поток в воздушном зазоре уменьшится, так как увеличение якоря противодействует потоку поля. Если не увеличить поток поля, чтобы компенсировать это изменение, выходное напряжение генератора уменьшится. Таким образом, ток возбуждения используется для управления выходным напряжением.
Давайте посмотрим на другой пример для дальнейшего пояснения. Предположим, к нашему генератору добавлена дополнительная нагрузка VAR. В этом случае выходной ток генератора снова возрастет. Однако, поскольку новая нагрузка не является «настоящей» мощностью, первичный двигатель необходимо увеличивать только настолько, чтобы компенсировать дополнительное падение IR, создаваемое дополнительным током.
В качестве последнего примера предположим, что у нас есть два или более генераторов, работающих параллельно и питающих нагрузку. Генератор 1 (G1) несет всю нагрузку (активную и реактивную), в то время как Генератор 2 (G2) работает с нулевой мощностью и нулевой реактивной мощностью. Если оператор G2 открывает дроссельную заслонку первичного двигателя, G2 начинает подавать ватты в систему. Поскольку подключенная нагрузка не изменилась, оба генератора увеличат скорость, если G1 не снизится.
Поскольку G2 берет на себя дополнительную долю нагрузки, ему требуется повышенный поток поля. Если оператор G2 не увеличивает поле G2, G2 будет получать дополнительное возбуждение от G1, требуя, чтобы G1 увеличил уровень своего возбуждения. Если ни G1, ни G2 не увеличат уровень возбуждения, общее напряжение системы упадет.
Джон Кадик, ЧП является президентом Cadick Professional Services, Гарленд, Техас, международной ассоциации электрических испытаний. (NETA) член.
Синхронный двигатель | bartleby
Что такое синхронный двигатель?
Синхронный двигатель представляет собой электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с током питания переменной частоты.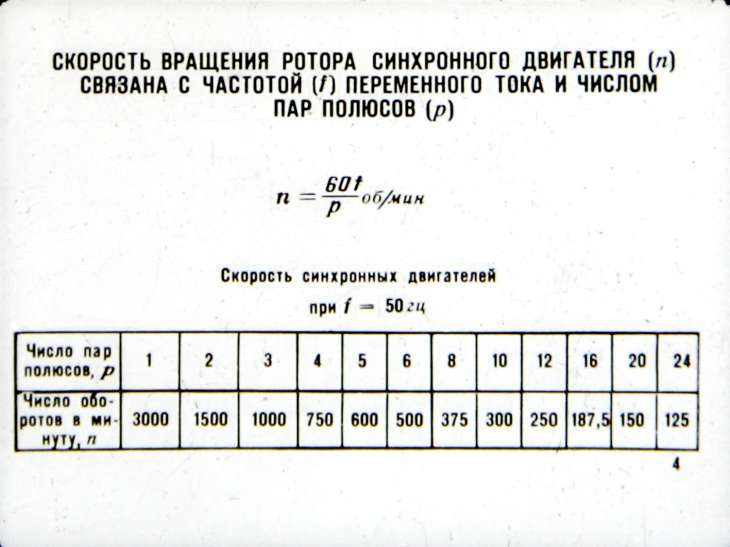 Целому числу циклов переменного тока период вращения точно равен. Статор двигателя в синхронном двигателе содержит многофазные электромагниты переменного тока, благодаря которым создается магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор содержит постоянный магнит, и ротор вращается синхронно с полем статора с той же скоростью и в результате создает второе синхронизированное магнитное поле, которое в природе вращается. Когда синхронный двигатель снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре, он называется машиной с двойным питанием. Наиболее распространенными двигателями переменного тока являются синхронные двигатели переменного тока и асинхронные двигатели переменного тока.
Целому числу циклов переменного тока период вращения точно равен. Статор двигателя в синхронном двигателе содержит многофазные электромагниты переменного тока, благодаря которым создается магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор содержит постоянный магнит, и ротор вращается синхронно с полем статора с той же скоростью и в результате создает второе синхронизированное магнитное поле, которое в природе вращается. Когда синхронный двигатель снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре, он называется машиной с двойным питанием. Наиболее распространенными двигателями переменного тока являются синхронные двигатели переменного тока и асинхронные двигатели переменного тока.
Асинхронный двигатель относится к типу асинхронного двигателя. Чтобы индуцировать ток в обмотке ротора, ротор должен вращаться немного медленнее, чем переменный ток.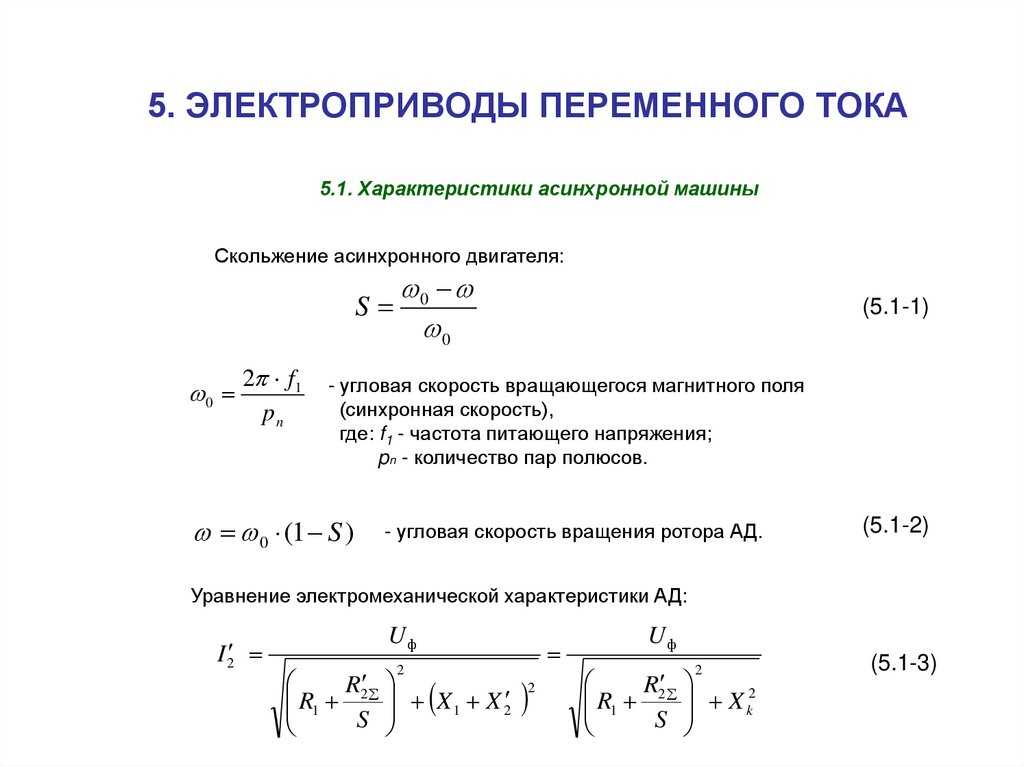 В приложениях синхронизации, таких как таймеры в бытовых приборах, синхронные часы, магнитофоны и т. Д., Используются небольшие синхронные двигатели. Синхронный двигатель доступен в дробных размерах лошадиных сил, которые самовозбуждаются до мощных промышленных размеров. Везде, где требуется точный моторный привод с постоянной скоростью, используются синхронные двигатели с дробным диапазоном мощности. Эти машины обычно используются в таймерах, электрических часах аналогового характера и других устройствах, где требуется точное время.
В приложениях синхронизации, таких как таймеры в бытовых приборах, синхронные часы, магнитофоны и т. Д., Используются небольшие синхронные двигатели. Синхронный двигатель доступен в дробных размерах лошадиных сил, которые самовозбуждаются до мощных промышленных размеров. Везде, где требуется точный моторный привод с постоянной скоростью, используются синхронные двигатели с дробным диапазоном мощности. Эти машины обычно используются в таймерах, электрических часах аналогового характера и других устройствах, где требуется точное время.
Синхронный двигатель большой мощности обеспечивает две важные функции.
- Во-первых, он преобразует энергию переменного тока в работу.
- Во-вторых, он может обеспечивать коррекцию коэффициента мощности, поскольку может работать с опережающим или единичным коэффициентом мощности. Коэффициент мощности двигателя можно изменять, изменяя возбуждение двигателя постоянным или постоянным током.
Разница между асинхронным двигателем и синхронным двигателем заключается в том, что, поскольку синхронный двигатель не зависит от индукции тока для создания магнитного поля ротора, он вращается со скоростью, привязанной к частоте сети, в отличие от асинхронного двигателя.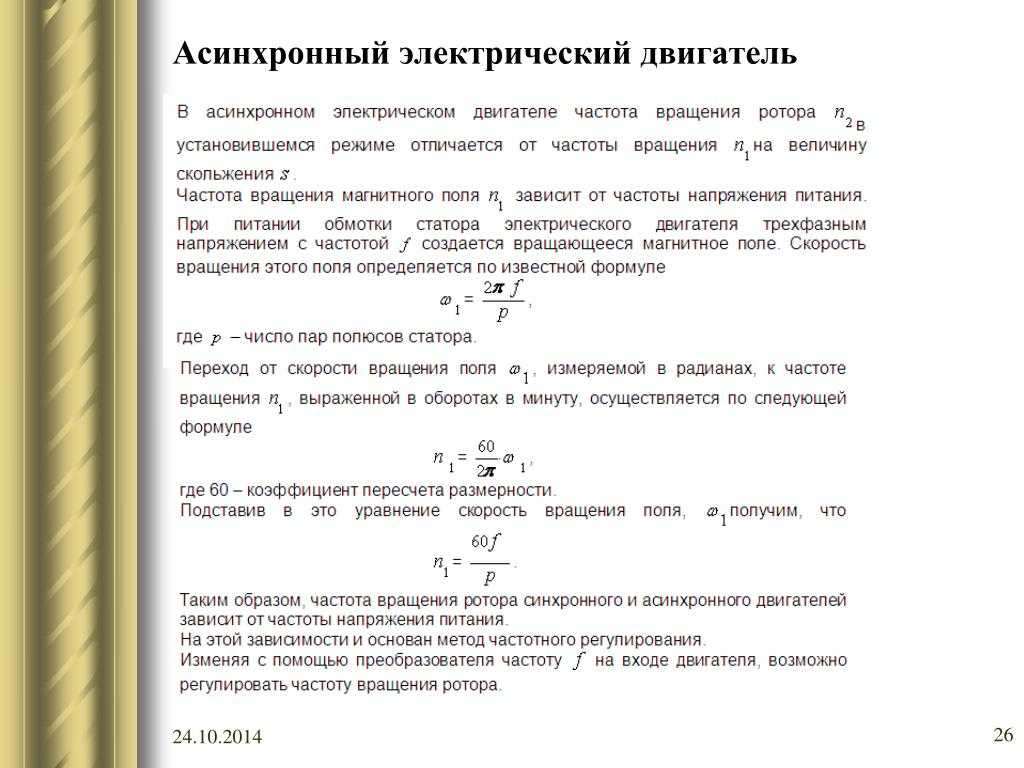
Синхронная скорость
Синхронная скорость вращения синхронного двигателя выражается в об/мин по формуле:
NS = 120 x fp
где f = частота в Гц и p = число полюсов
и в рад/сек определяется как:
ωs = 4πfp
, где f = частота в Гц и p = количество полюсов
Пример
Рассмотрим однофазный 4-полюсный синхронный двигатель, работающий при частоте переменного тока 50 Гц. поэтому синхронная скорость будет равна NS = 120 x 504 = 1200 об/мин.
Конструкция
Статор и ротор являются основными компонентами синхронного двигателя. Статор как асинхронного, так и синхронного двигателя аналогичен по конструкции. В виде исключения корпус статора содержит обертку с синхронной электрической машиной двойного питания с фазным ротором. Клавиатуры и окружные ребра прикреплены к оберточной пластине. Крепление на раме и опоры необходимы для переноски машины. Для подключения к источнику питания возбуждения требуются щетки и токосъемные кольца, когда обмотка возбуждения возбуждается постоянным током, но когда она не возбуждена, она не подключается. С помощью бесщеточного возбудителя также можно возбуждать обмотку возбуждения. Для шести полюсов используются цилиндрические круглые роторы.
С помощью бесщеточного возбудителя также можно возбуждать обмотку возбуждения. Для шести полюсов используются цилиндрические круглые роторы.
В отличие от неявнополюсного ротора, явнополюсный ротор используется, когда в некоторых машинах требуется большое количество полюсов. Конструкция синхронных двигателей почти аналогична конструкции синхронного генератора переменного тока. Стационарный якорь и обмотка вращающегося возбуждения используются в конструкции большинства синхронных двигателей. Этот тип конструкции является преимуществом двигателя постоянного тока, в котором используется вращающийся якорь.
Операции
За счет взаимодействия поля статора и ротора работает синхронный двигатель. Обмотка статора, которая присутствует в статоре, снабжена трехфазным питанием, а ротор снабжен питанием постоянного тока. Трехфазный вращающийся магнитный поток создается трехфазной обмоткой статора, по которой течет трехфазный ток. Ротор блокируется этим вращающимся магнитным полем и соответственно вращается вместе с ним.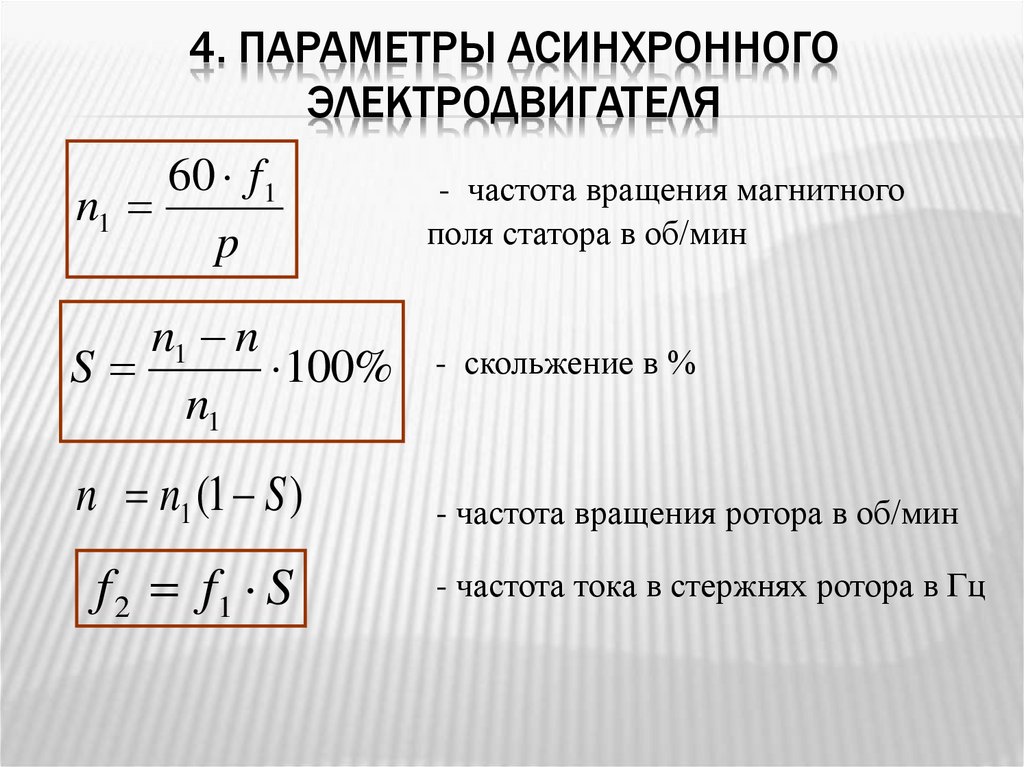 Говорят, что двигатель синхронизирован, когда поле ротора блокируется полем статора. Возможен также статор с однофазной обмоткой, но здесь направление вращения не определено, поскольку машина может начать вращаться в любом направлении, если только этому не препятствуют пусковые устройства.
Говорят, что двигатель синхронизирован, когда поле ротора блокируется полем статора. Возможен также статор с однофазной обмоткой, но здесь направление вращения не определено, поскольку машина может начать вращаться в любом направлении, если только этому не препятствуют пусковые устройства.
Скорость двигателя зависит только от частоты сети, когда двигатель работает. Обмотка возбуждения больше не следует за вращающимся магнитным полем, и двигатель теряет синхронизацию, когда нагрузка двигателя превышает нагрузку пробоя. Если синхронизация выходит из строя, поскольку двигатель не может создавать крутящий момент, на практике синхронные двигатели имеют обмотки, называемые демпферными обмотками, для стабилизации работы и облегчения запуска.
Крутящий момент создается разностью фаз между вращающимся магнитным полем и ротором. Когда существует небольшая разность фаз между вращающимся ротором и вращающимся магнитным полем, создаваемый крутящий момент невелик. Крутящий момент, который развивается при пуске, называется пусковым моментом, а момент полной нагрузки двигателя называется рабочим моментом. Затем эквивалентного асинхронного двигателя, поскольку эти обмотки меньше и при длительной работе могут перегреваться, а в обмотках возбуждения ротора, поскольку индуцируются большие напряжения, устройства защиты синхронных двигателей могут определить это состояние и отключить подачу питания.
Затем эквивалентного асинхронного двигателя, поскольку эти обмотки меньше и при длительной работе могут перегреваться, а в обмотках возбуждения ротора, поскольку индуцируются большие напряжения, устройства защиты синхронных двигателей могут определить это состояние и отключить подачу питания.
Методы пуска
Синхронные двигатели — это типы двигателей, которые не запускаются автоматически. Это связано с инерцией ротора, поэтому он не может мгновенно следовать за вращением магнитного поля статора. В состоянии покоя синхронный двигатель не создает собственного крутящего момента. Так что без какого-то дополнительного механизма он не может разогнаться до синхронной скорости.
Асинхронный двигатель с короткозамкнутым ротором входит в состав больших двигателей, работающих на промышленной частоте, что обеспечивает достаточный крутящий момент для ускорения, а при работе на скорости двигателя также служит для гашения колебаний. Обмотка возбуждения возбуждается, и двигатель выходит из синхронизма, когда скорость ротора приближается к синхронной.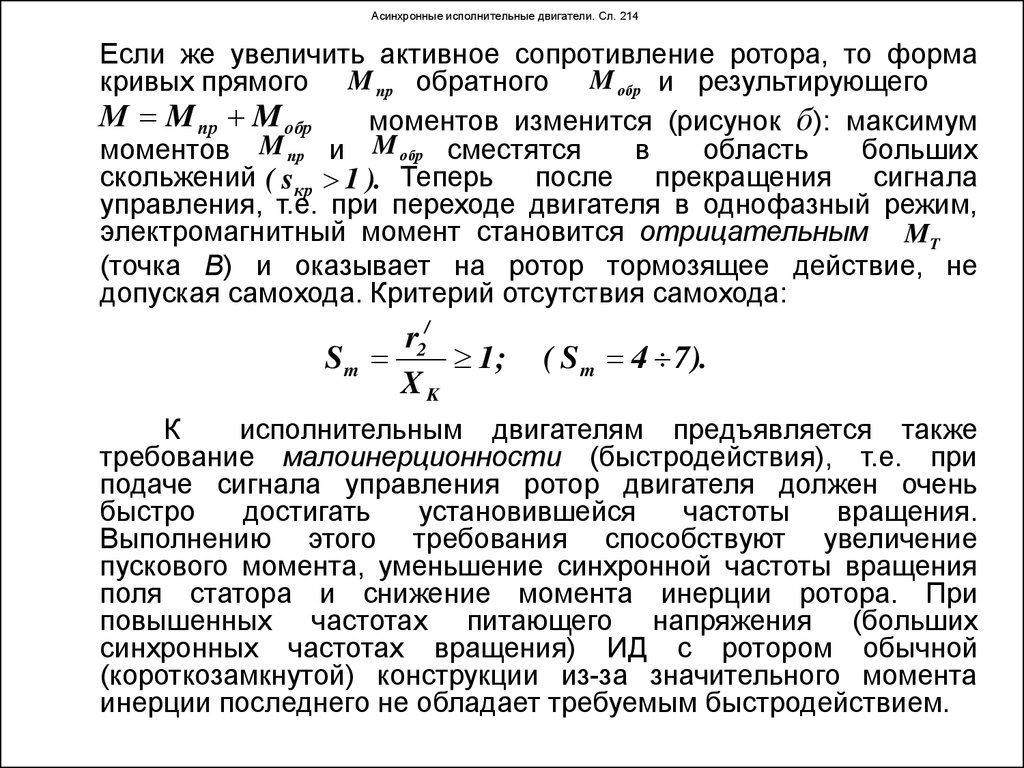
Перед приложением нагрузки система очень больших двигателей может включать маломощный двигатель, который ускоряет синхронную машину, которая не нагружена. Изменяя частоту тока статора, двигатели с электронным управлением можно разогнать с нулевой скорости. Используются электрические механические часы с встроенным питанием или очень маленькие таймеры синхронного двигателя, которые используют частоту сети для запуска зубчатого механизма с правильной скоростью. Если момент инерции ротора и его механическая нагрузка достаточно малы, то такие небольшие синхронные двигатели могут запускаться без посторонней помощи.
При рассмотрении различных методов пуска важным параметром является экономичность эксплуатации. Возможным способом решения проблемы пуска двигателя является возбуждение ротора. Рабочий момент в синхронном двигателе составляет от 0,3 до 16 унций-дюйм. Синхронный двигатель с экранированными полюсами — это тип двигателя переменного тока, в котором используются катушки возбуждения с дополнительными медными экранирующими катушками для создания слабого вращающегося поля. Корпорация Nidec Motors производит лучшие синхронные двигатели.
Корпорация Nidec Motors производит лучшие синхронные двигатели.
Контекст и приложения
Эта тема важна для профессиональных экзаменов для выпускников и аспирантов.
- Бакалавр электротехники
- Магистр электротехники
Практические задачи
Q1. С каким коэффициентом мощности могут работать синхронные двигатели?
- Единичный коэффициент мощности
- Ведущий коэффициент мощности
- Оба a и b
- Ничего из перечисленного
Ответ: Вариант c
Объяснение: Он может работать с опережающим и единичным коэффициентом мощности, поскольку синхронные двигатели преобразуют энергию переменного тока в работу, а также обеспечивают коррекцию коэффициента мощности.
Q2. К какому типу относятся асинхронные двигатели?
- Синхронные двигатели
- Асинхронные двигатели
- Двигатели постоянного тока
- Ни один из этих
Ответ: Вариант b
Типы асинхронных двигателей
Q3. Каков рабочий крутящий момент синхронных двигателей?
Каков рабочий крутящий момент синхронных двигателей?
- от 0,3 до 16 унций в
- 17–20 унций в
- 50–100 унций в
- Ни один из этих
Ответ: Вариант A
Объяснение: . двигателей составляет от 0,3 до 16 унций-в.
Q4. Что происходит с синхронной скоростью при изменении нагрузки?
- Увеличивается при увеличении нагрузки
- Уменьшается при уменьшении нагрузки
- Всегда остается постоянным
- Ни один из этих
Ответ: Вариант c
Объяснение: Синхронная скорость – это постоянная скорость, которая зависит от частоты питания и количества полюсов.
Q5. Что содержит ротор?
- Постоянный магнит
- Электрический магнит
- Электромагнит
- Ничего из перечисленного
Ответ : Вариант a
Объяснение: Ротор содержит постоянный магнит, и ротор вращается синхронно с полем статора с той же скоростью и в результате создает второе синхронизированное магнитное поле, которое в природе вращается.