
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.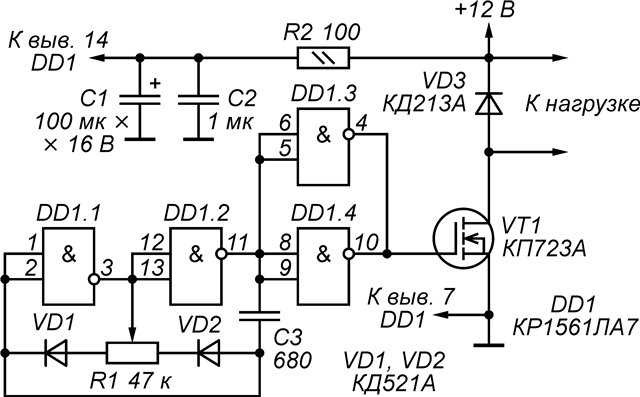 д.
д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
ШИМ регулятор скорости двигателя постоянного тока
- Все статьи блога
- Радиолюбителю — конструктору
Регулировать скорость вращения небольших двигателей постоянного тока очень удобно посредством широтно-импульсной модуляции — ШИМ или PWM (pulse-width modulation). Предлагаемая схема управления очень проста и собрана всего на одном распространенном и дешевом чипе LM324. Эта микросхема содержит четыре одинаковых операционных усилителя в одном корпусе. Для реализации схемы ШИМ в общем случае необходим генератор напряжения треугольной формы и компаратор. два из четырех ОУ микросхемы LM324 работают в генераторе, третий ОУ включен как компаратор. Четвёртый ОУ не используется. Никто не мешает вам использовать в этой схеме три одиночных операционных усилителя общего применения, например TL071 или один сдвоенный и один одинарный ОУ, к примеру, TL072 + TL071. В этом случае размер устройства, конечно, будет больше, чем в случае использования одно счетверенного ОУ.
Четвёртый ОУ не используется. Никто не мешает вам использовать в этой схеме три одиночных операционных усилителя общего применения, например TL071 или один сдвоенный и один одинарный ОУ, к примеру, TL072 + TL071. В этом случае размер устройства, конечно, будет больше, чем в случае использования одно счетверенного ОУ.
Генератор напряжения треугольной формы собран на ОУ N1 и N2 по известной схеме «интегратор-компаратор». На выходе компаратора на N2 (14) формируются прямоугольные импульсы частотой около 1.6 кГц, которые по цепи обратной связи подаются на инвертирующий вход (2) интегратора, собранного на ОУ N1 через резистор R1. С выхода интегратора (1) снимается сигнал треугольной формы с той же частотой 1.6 кГц. Треугольная волна поступает на неинвертирующий вход (5) компаратора, реализованного на ОУ N3. Одновременно на инвертирующий вход N3 поступает образцовое напряжение с движка потенциометра VR1, который входит в делитель напряжения R4, R5, VR1. При указанных номиналах делителя напряжения и напряжении питания ∓12В, образцовое напряжение может принимать значения от -6 до +6 вольт, в зависимости от угла поворота оси потенциометра VR1.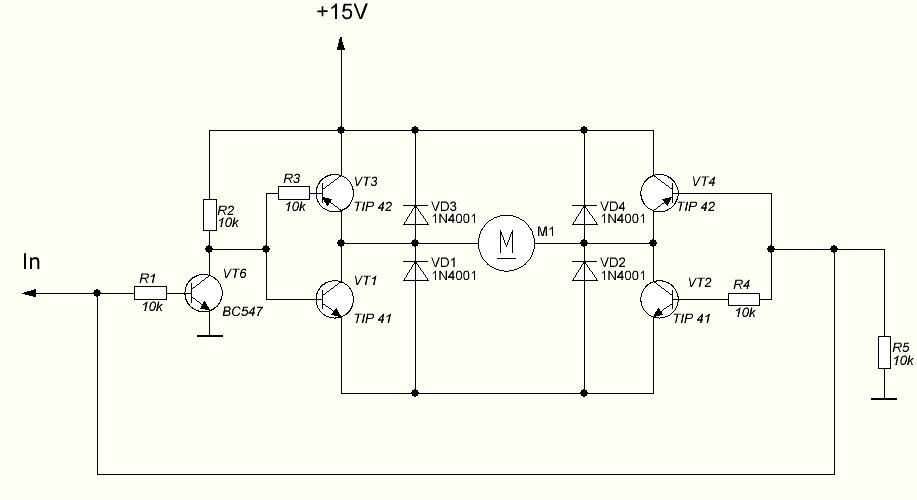
Наглядно процесс показан на графике ниже. Зеленая линия — это образцовое напряжение. Прямоугольный сигнал синего цвета — это выходной сигнал компаратора.
ШИМ сигнал с выхода N3 подается га затвор MOSFET транзистора Т1. двигатель постоянного тока включен в цепь стока этого транзистора. Во время действия высокого уровня напряжения полевой транзистор открывается и подключает двигатель к источнику питания.
Для работы схемы требуется двухполярный источник питания напряжением ∓12В. Схема может быть модифицированна для использования с двигателями постоянного тока, рассчитанными на напряжение от 6 до 24 вольт.м
circuit engineeringComparatorPWMкомпараторсхемотехникаШИМ
Управление щеточными двигателями постоянного тока с помощью ШИМ
Загрузите эту статью в формате PDF.
Многие приложения, использующие миниатюрные коллекторные двигатели постоянного тока, требуют, чтобы двигатели работали более чем в одной точке нагрузки или в течение определенных циклов нагрузки. Для запуска двигателя в рабочих точках нагрузки требуется переменный, управляемый источник питания. Это можно сделать с помощью непрерывного источника питания с линейной регулировкой или широтно-импульсной модуляции (ШИМ).
Для запуска двигателя в рабочих точках нагрузки требуется переменный, управляемый источник питания. Это можно сделать с помощью непрерывного источника питания с линейной регулировкой или широтно-импульсной модуляции (ШИМ).
Линейное регулирование, как правило, неэффективно и требует большего корпуса. Более того, в приложениях с батарейным питанием нецелесообразно использовать линейное регулирование при различных точках нагрузки. ШИМ-регулирование напряжения, с другой стороны, является эффективным и может эффективно использоваться в приложениях с питанием от батареи или постоянного тока. Более высокая эффективность ШИМ-привода увеличивает срок службы батареи и снижает нагрев электронных компонентов.
Одним из недостатков использования ШИМ с двигателем являются потери на вихревые токи в обмотках ротора из-за непрерывного переключения ШИМ, которые, как правило, отсутствуют в линейных источниках питания. Однако правильно спроектированный ШИМ сводит к минимуму эффекты вихревых токов и улучшает работу двигателей.
Коллекторные двигатели постоянного тока без сердечника имеют низкую инерцию и индуктивность. Это позволяет использовать их в приложениях, требующих динамического поведения и быстрой реакции двигателя. Использование ШИМ позволяет точно контролировать ток в обмотках. Следовательно, выходной крутящий момент, который линейно пропорционален среднему току обмотки, можно правильно регулировать в двигателях без сердечника.
В отличие от чисто резистивных нагрузок для двигателей постоянного тока, сопротивление, индуктивность и обратная ЭДС на обмотках ротора являются решающими факторами при оптимизации частоты ШИМ и рабочего цикла.
Линейный и ШИМ-источник питания
В линейном источнике постоянного тока (как показано на рисунке ниже) ток зависит только от сопротивления обмотки. Индуктивность не влияет на ток, как при постоянном источнике. Импеданс катушки индуктивности равен нулю.
Значения по каталогу и прогнозируемый срок службы для большинства двигателей без сердечника оцениваются с использованием постоянного линейного источника питания постоянного тока.![]()
При использовании источника ШИМ схема видит омическое сопротивление и индуктивность из-за частых переключений. Кроме того, на клемме создается противо-ЭДС, эквивалентная характеристикам двигателя (KE) и скорости. Это усложняет схему ШИМ при ее разработке для конкретного приложения, поскольку для достижения наилучших характеристик двигателя необходимо точно контролировать не только рабочий цикл, но и частоту ШИМ.
Когда двигатель находится в состоянии покоя или вращается с низкой скоростью, противо-ЭДС можно пренебречь. Упрощенная эквивалентная схема двигателя показана ниже.
Диод свободного хода или демпфирующий диод (параллельно клеммам двигателя на приведенной выше схеме) никогда не следует опускать при использовании переменного напряжения, такого как ШИМ. Диод позволяет рассеивать заряд без образования дуги при переключении.
Когда двигатель работает на умеренно высокой скорости, противо-ЭДС сравнима с приложенным напряжением, поэтому в эквивалентную схему необходимо добавить составляющую, представляющую противо-ЭДС. Модифицированная эквивалентная схема показана ниже.
Модифицированная эквивалентная схема показана ниже.
Обратная ЭДС вместе с цепью RL в щеточном двигателе постоянного тока вносит нелинейность в управление ШИМ, а частота ШИМ и рабочий цикл ШИМ становятся важными для получения наилучшей выходной мощности.
Когда ШИМ управляет двигателем и электромагнитная совместимость имеет решающее значение, рекомендуется анализировать эффекты излучения, поскольку излучаемая электромагнитная энергия обычно выше с ШИМ, чем с линейными источниками постоянного тока.
Вольт-амперные характеристики
Когда напряжение подается на цепь RL, дроссель противодействует току в цепи. В результате ток экспоненциально возрастает до установившегося значения, которое зависит от отношения двигателя L/R . На приведенном ниже графике показано экспоненциальное увеличение тока через обмотку в цепи RL. Когда приложенное напряжение снимается с цепи, ток медленно падает до нуля, затухая по экспоненциальному закону.
Константа L/R (она же постоянная времени для RL-цепи) определяет максимальную скорость изменения приложенного напряжения в цепи. Стационарное состояние после любого изменения приложенного напряжения достигается через период, равный нескольким постоянным времени. График тока двигателя (выше) показывает его экспоненциальный рост, что представляет собой идеальный сценарий. Пятикратная постоянная времени ( 5L/R ) обычно считается временем, необходимым для достижения устойчивого состояния. Однако при пятикратной постоянной времени схема находится на уровне около 99,33% от его максимального значения.
Стационарное состояние после любого изменения приложенного напряжения достигается через период, равный нескольким постоянным времени. График тока двигателя (выше) показывает его экспоненциальный рост, что представляет собой идеальный сценарий. Пятикратная постоянная времени ( 5L/R ) обычно считается временем, необходимым для достижения устойчивого состояния. Однако при пятикратной постоянной времени схема находится на уровне около 99,33% от его максимального значения.
Пренебрегая противо-ЭДС для простоты, нарастание тока в простой RL-цепи можно представить как:
Где
I 0 — максимальный ток через RL-цепь при заданном напряжении; τ — постоянная времени цепи RL, определяемая как время, необходимое для достижения током значения 1/e, или около 63,21 % от максимального тока; а т это время.
После достижения устойчивого состояния, если источник питания отключен, ток через цепь RL спадает экспоненциально (как показано ниже).
Рекомендации по проектированию ШИМ
Когда привод ШИМ используется с щеточными двигателями постоянного тока, внутренняя индуктивность ротора действует как фильтр тока, что хорошо для схемы привода. Однако другие конструктивные параметры, такие как частота ШИМ и рабочий цикл, влияют на пульсации тока и, следовательно, на срок службы щеточной коммутации.
Когда ШИМ управляет двигателем, ток через двигатель увеличивается и падает с каждым периодом ШИМ. Игнорируя противо-ЭДС двигателя, нарастание тока является функцией индуктивности двигателя и общего сопротивления. Для каждого цикла ШИМ частота ШИМ должна быть выбрана таким образом, чтобы было достаточно времени, чтобы ток достиг своего установившегося значения, которое обычно превышает 5τ. На приведенном ниже графике показаны условия, когда частота ШИМ достаточна для достижения устойчивого состояния.
Когда частота ШИМ превышает пороговое значение, время включения и выключения ШИМ становится короче, чем время, необходимое для работы цепи RL и достижения установившегося состояния тока.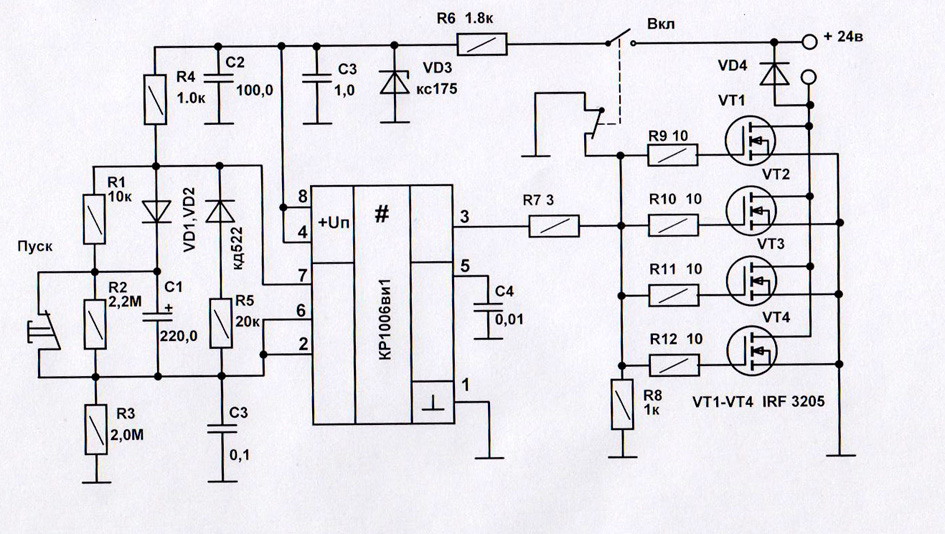 Следовательно, ток колеблется между двумя неустановившимися значениями, что вызывает пульсации тока. На приведенном ниже графике показано состояние, когда частота ШИМ выше, чем время, необходимое для установившегося режима, и ток через двигатель колеблется.
Следовательно, ток колеблется между двумя неустановившимися значениями, что вызывает пульсации тока. На приведенном ниже графике показано состояние, когда частота ШИМ выше, чем время, необходимое для установившегося режима, и ток через двигатель колеблется.
С точки зрения конструкции пульсации тока должны быть уменьшены путем регулировки частоты возбуждения таким образом, чтобы выходной крутящий момент был почти линейным. Также рекомендуется поддерживать частоту ШИМ выше диапазона слышимости человека (выше 20 кГц), поскольку пульсации тока в этом диапазоне частот могут создавать шум во время работы двигателя.
Пульсация тока
Для определенных щеточных двигателей без сердечника пульсации тока должны быть как можно ниже. Как правило, пульсация ниже 10% считается низким значением. Более высокие пульсации влияют на производительность несколькими способами: Выходной крутящий момент двигателя пропорционален току, тогда как омический (резистивный) нагрев обмотки пропорционален квадрату тока. Таким образом, при пиковых токах преобладает нагрев обмоток, который снижает производительность и срок службы двигателя. В коллекторных двигателях постоянного тока Portescap не используются пластины из железа, поэтому потери на вихревые токи и гистерезис в магнитной цепи прямо пропорциональны пульсациям тока и могут снизить общую производительность двигателя. При коммутации драгоценных металлов повышенная электроэрозия влияет на срок службы двигателя, поскольку электроэрозия пропорциональна коэффициенту L x I эфф 2 . где L — индуктивность, а I eff — эффективный ток через обмотку. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или пленка — это слой оксида меди, образующийся на поверхности коллектора угольной щетки, который улучшает коммутацию и снижает трение.) Следовательно, на более низких скоростях контакт щетки будет ухудшаться. На средних и высоких скоростях патина не оказывает существенного влияния на работу двигателя.
Таким образом, при пиковых токах преобладает нагрев обмоток, который снижает производительность и срок службы двигателя. В коллекторных двигателях постоянного тока Portescap не используются пластины из железа, поэтому потери на вихревые токи и гистерезис в магнитной цепи прямо пропорциональны пульсациям тока и могут снизить общую производительность двигателя. При коммутации драгоценных металлов повышенная электроэрозия влияет на срок службы двигателя, поскольку электроэрозия пропорциональна коэффициенту L x I эфф 2 . где L — индуктивность, а I eff — эффективный ток через обмотку. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или пленка — это слой оксида меди, образующийся на поверхности коллектора угольной щетки, который улучшает коммутацию и снижает трение.) Следовательно, на более низких скоростях контакт щетки будет ухудшаться. На средних и высоких скоростях патина не оказывает существенного влияния на работу двигателя.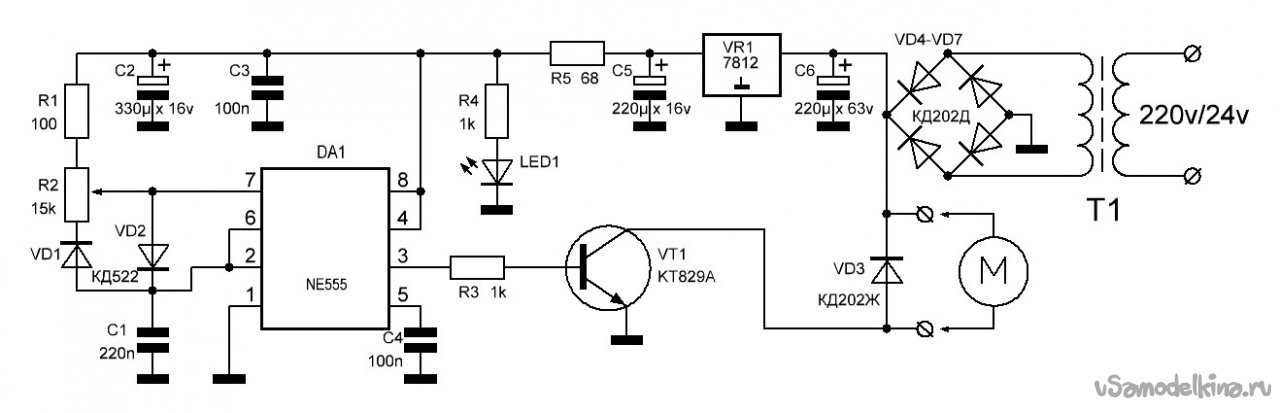
Индуктивное напряжение на клемме может быть указано как:
Где L — индуктивность; U L — напряжение, генерируемое на катушке индуктивности; а T — бесконечно малое время, за которое ток изменяется на ∆I.
При работе двигателя с ШИМ напряжение на его клемме противодействует противо-ЭДС, генерируемой на клемме двигателя. Следовательно, уравнение 3 можно переписать как для нарастания, так и для падения тока в операциях ШИМ как:
и:
Где нижний индекс ON обозначает время «включения», а OFF обозначает время «выключения» импульса ШИМ, так что общее время Т P дается как:
Из уравнения. 5,
Вставка значения из уравнения. 7 в уравнение 4, мы получаем
T ON и T OFF в приведенном выше уравнении можно дать как
и
Где D — рабочий цикл ШИМ-сигнала.
Отсюда уравнение 8 можно переписать как:
Ур. 11 можно использовать для извлечения пульсаций тока в двигателе из-за ШИМ-сигнала с рабочим циклом D и частотой 1/T P .
Интересно отметить из уравнения. 11 видно, что пульсации тока максимальны, когда рабочий цикл составляет 50%. Следовательно, предлагается, чтобы проектировщики запускали двигатель вдали от зоны рабочего цикла 50%.
Кроме того, из приведенного выше уравнения пульсации тока зависят только от индуктивности двигателя, а не от электрической постоянной времени двигателя.
В идеале для двигателей без сердечника разница (U ON – U OFF ), иногда обозначаемая как ∆U, должна быть как можно меньше в зависимости от максимального входного напряжения двигателя и скорости применения.
Индуктивность двигателя на клеммах зависит от частоты ШИМ. Например, в каталоге указана индуктивность двигателя Portescap при частоте 1 кГц; но на частоте 100 кГц индуктивность может уменьшиться до 20% от каталожного значения.
По сравнению с двигателями с железным сердечником индуктивность двигателей без сердечника ниже в два раза. Кроме того, добротность хуже, так как в обмотках ротора отсутствуют железные пластины. Следовательно, ШИМ-привод с двигателем без сердечника будет иметь относительно более высокие потери и меньшую электронную стабильность.
Следовательно, ШИМ-привод с двигателем без сердечника будет иметь относительно более высокие потери и меньшую электронную стабильность.
Срок службы двигателя
В коллекторных двигателях постоянного тока наиболее распространенным видом отказа является износ щеток из-за коммутации. В течение срока службы двигателя щетки (угольно-графитовые или из драгоценных металлов) подпружиниваются и механически соединяются с сегментами коллектора для зарядки катушек. Это делает износ щеток функцией механического трения, возникающего при скольжении щеток по сегментам коллектора, и электроэрозии, вызванной электрическими разрядами во время коммутации.
При использовании приводов ШИМ для работы двигателя с различными скоростями и нагрузками расчетный срок службы двигателя представляет собой сложную комбинацию различных факторов, влияющих на его износостойкость. Эти факторы могут включать: Более высокую плотность тока в коммутации из-за пониженного КПД, высокого механического трения, недостаточной смазки или рециркуляции тока.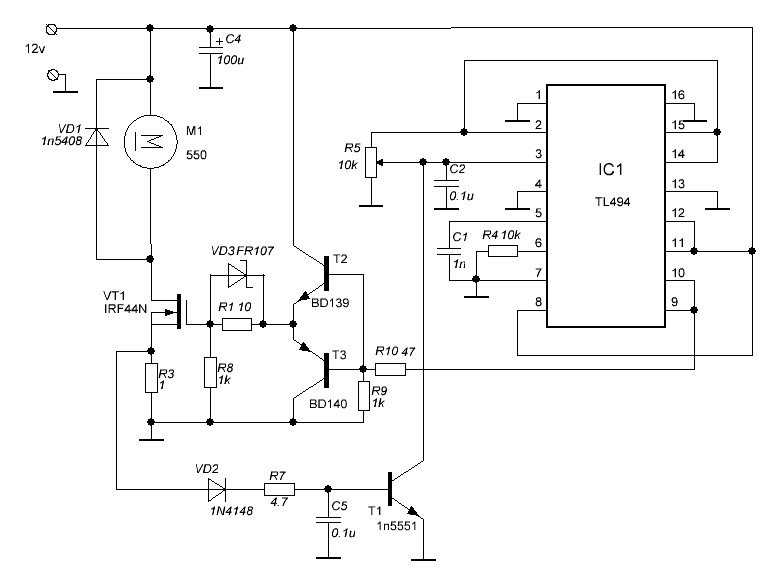 Высокая электроэрозия при скачках тока при использовании источников ШИМ. Более высокая рабочая температура двигателя из-за условий окружающей среды или более высокая удельная мощность двигателя, что снижает качество смазки.
Высокая электроэрозия при скачках тока при использовании источников ШИМ. Более высокая рабочая температура двигателя из-за условий окружающей среды или более высокая удельная мощность двигателя, что снижает качество смазки.
В зависимости от области применения и источника питания двигателя его ожидаемый срок службы может зависеть от одного или нескольких факторов, описанных выше.
Для конструкций двигателей, в которых точка нагрузки требует, чтобы двигатель работал с умеренными крутящим моментом и скоростью, без осевых и радиальных нагрузок, действующих на вал, и в умеренном диапазоне температур (обычно ниже 60 °C), износ, как правило, обусловлен электромеханическими нагрузками. -эрозия. Тогда ресурс двигателя обратно пропорционален индуктивности и квадрату тока:
В приведенном выше уравнении рассматривается линейный источник или источник ШИМ с пульсациями тока, которые пренебрежимо малы по сравнению со средним током, протекающим через двигатель. В практических сценариях пульсация может значительно сократить срок службы двигателя.
Случай 1: Пульсации тока менее 10 %. Чтобы уменьшить пульсации тока до уровня менее 10 % в коллекторных двигателях постоянного тока Portescap, диапазон частот может достигать 40–120 кГц.
С ШИМ, экв. 12 можно переписать так:
л потерь — потери в диоде и потери на вихревые токи и гистерезис на трубке двигателя. Эти потери снижают общий КПД двигателя. Тем не менее, хорошая конструкция обеспечивает КПД ШИМ от 85 до 90%.
Из уравнения. 12 и 13, и с учетом l потерь как 10% от I двигателя .
Тогда:
Следовательно, при эффективности ШИМ 90 %
Случай 2: Пульсации тока значительны. Уравнение 14 остается верным, когда я потери низки по сравнению с двигателем I . Но когда пульсация тока высока, мгновенный ток проходит через двигатель и нагревает его; тогда уравнение следует изменить, чтобы оно стало следующим:
Учитывая ШИМ с рабочим циклом 50%, где пульсации максимальны, а средняя мощность двигателя равна P, интегральная часть может быть переписана как:
Таким образом, уравнение. 16 можно переписать с учетом 90% эффективности ШИМ следующим образом:
16 можно переписать с учетом 90% эффективности ШИМ следующим образом:
ШИМ увеличивает срок службы двигателя
Есть несколько вещей, которые можно сделать для увеличения срока службы двигателя при использовании ШИМ:
1. Уменьшите пульсации тока двигателя. Пульсации тока можно уменьшить, увеличив частоту ШИМ. Если частота ШИМ значительно выше, чем постоянная времени двигателя (L/R), пульсации еще больше уменьшаются. Для двигателей без сердечника Portescap рекомендуется пульсация менее 10 % для увеличения срока службы двигателя.
Другой интуитивный подход к уменьшению пульсаций тока заключается в добавлении внешней индуктивности в цепь двигателя, которая действует как токовый фильтр. Обычно это повышает эффективность. Однако индуктор усугубляет общую электроэрозию системы щетка-коллектор, поскольку электроэрозия прямо пропорциональна индуктивности цепи. Следовательно, если только эффективность и нагрев двигателя не являются проблемой, этот подход не рекомендуется.
2. Конструкция преобразователя постоянного тока. В конструкциях, подобных приведенной ниже, эффективность системы резко повышается, а срок службы щеток двигателя увеличивается по сравнению с решением, в котором в цепь добавляется внешняя индуктивность.
Чтобы оптимизировать схему, пульсации напряжения, заданные ур. 18, следует свести к минимуму. Значение менее 10 % достаточно для практической работы двигателя.
Из приведенного ниже уравнения следует, что на более высоких частотах значение катушки индуктивности и конденсатора будет уменьшаться, и, следовательно, общая упаковка привода ШИМ уменьшится.
Ультразвуковые колебания могут возникать в роторе при работе двигателя на более низких частотах. Поэтому предлагается управлять двигателем на частотах выше 20 кГц.
Для приложений с батарейным питанием, где используются миниатюрные двигатели, эффективность приложения определяет цикл заряда батарей. Привод PWM помогает, позволяя двигателю работать на разных скоростях.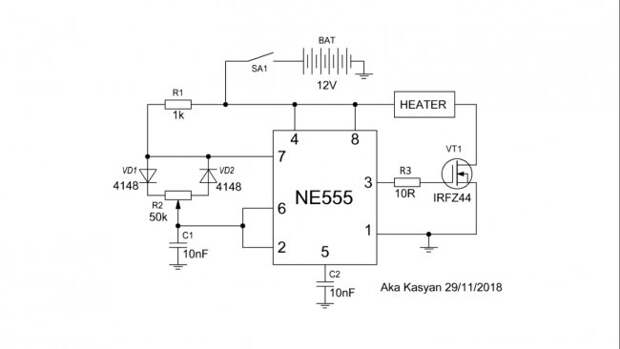 Однако необходима точная конструкция ШИМ, чтобы пульсации тока и напряжения были незначительными и срок службы двигателя не сокращался.
Однако необходима точная конструкция ШИМ, чтобы пульсации тока и напряжения были незначительными и срок службы двигателя не сокращался.
Sunil Kedia is m Менеджер по дизайну и разработке в Portescap.
Что такое ШИМ-управление двигателем — 4QD
Что такое широтно-импульсная модуляция? как работает ШИМ-управление двигателем и как выглядит схема ШИМ? На этой странице мы подробно рассмотрим теорию и практику ШИМ-управления двигателем.
Принципы
Для управления скоростью постоянного тока. двигатель нам нужен переменного напряжения постоянного тока. источник питания. Однако, если вы возьмете 12-вольтовый двигатель и включите на него питание, двигатель начнет ускоряться: двигатели не реагируют сразу, поэтому для достижения полной скорости потребуется небольшое время. Если мы отключим питание за некоторое время до того, как двигатель достигнет полной скорости, двигатель начнет замедляться. Если мы будем включать и выключать питание достаточно быстро, двигатель будет работать на некоторой скорости между нулевой и полной скоростью.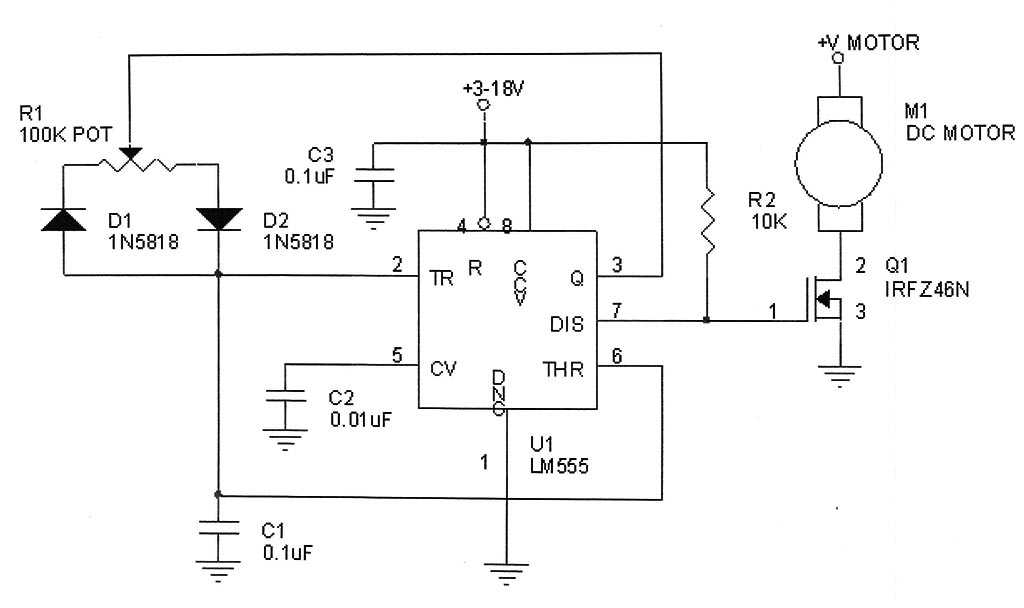 Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов. Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов. Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
 Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышен. Он также достаточно медленный, чтобы МОП-транзисторы могли легко переключаться на этой частоте. Однако двигатель имеет индуктивность. Индуктивность не любит изменений тока. Если двигатель потребляет какой-либо ток, то этот ток протекает через переключатель MOSFET, когда он включен, но куда он будет течь, когда MOSFET выключается? Читайте дальше и узнайте! Схема управления двигателем ШИМ
Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышен. Он также достаточно медленный, чтобы МОП-транзисторы могли легко переключаться на этой частоте. Однако двигатель имеет индуктивность. Индуктивность не любит изменений тока. Если двигатель потребляет какой-либо ток, то этот ток протекает через переключатель MOSFET, когда он включен, но куда он будет течь, когда MOSFET выключается? Читайте дальше и узнайте! Схема управления двигателем ШИМ Рассмотрим приведенную выше схему: на ней показаны приводной полевой МОП-транзистор и двигатель. Когда приводной МОП-транзистор проводит ток, ток течет от плюса батареи через двигатель и МОП-транзистор (стрелка A) и обратно к минусу батареи. Когда MOSFET отключается, ток двигателя продолжает течь из-за индуктивности двигателя. К двигателю подключен второй полевой МОП-транзистор: МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток через МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (замкнуть его затвор на исток) или использовать силовой диод. Однако не так общеизвестный факт о полевых МОП-транзисторах заключается в том, что когда они включены, они проводят ток в любом направлении. Проводящий МОП-транзистор сопротивляется току в любом направлении, и проводящий мощный МОП-транзистор фактически падает меньше напряжения, чем диод с прямым смещением, поэтому МОП-транзистор требует меньшего отвода тепла и тратит меньше энергии батареи.
Вы можете использовать такой полевой МОП-транзистор (замкнуть его затвор на исток) или использовать силовой диод. Однако не так общеизвестный факт о полевых МОП-транзисторах заключается в том, что когда они включены, они проводят ток в любом направлении. Проводящий МОП-транзистор сопротивляется току в любом направлении, и проводящий мощный МОП-транзистор фактически падает меньше напряжения, чем диод с прямым смещением, поэтому МОП-транзистор требует меньшего отвода тепла и тратит меньше энергии батареи.
Из приведенного выше следует, что если приводной полевой МОП-транзистор включен в течение 50% рабочего цикла, напряжение двигателя составляет 50% от напряжения батареи, и, поскольку ток батареи протекает только при включенном МОП-транзисторе, ток батареи течет только в течение 50% времени, поэтому средний ток батареи составляет всего 50% от тока двигателя!
Главный конденсатор
Однако есть проблема: когда МОП-транзистор отключается, он не только прерывает ток двигателя, но также прерывает ток, протекающий от батареи. Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этого всплеска. Когда приводной МОП-транзистор снова включается, ток батареи просят быстро течь, чего он не может. Основной конденсатор подает ток в течение периода восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! Во время ранней разработки мы однажды использовали стандартные конденсаторы с проволочными наконечниками и расплавили провода конденсатора! Конденсаторы имеют медное покрытие 9Провода из стали 0229 , а в системах управления двигателями эти провода могут сильно нагреваться!
Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этого всплеска. Когда приводной МОП-транзистор снова включается, ток батареи просят быстро течь, чего он не может. Основной конденсатор подает ток в течение периода восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! Во время ранней разработки мы однажды использовали стандартные конденсаторы с проволочными наконечниками и расплавили провода конденсатора! Конденсаторы имеют медное покрытие 9Провода из стали 0229 , а в системах управления двигателями эти провода могут сильно нагреваться!
Из вышеизложенного видно, что работа этого конденсатора сильно зависит от индуктивности контура проводов батареи. Длинные провода будут иметь большую индуктивность. Скручивание проводов батареи снижает их индуктивность.
Длинные провода будут иметь большую индуктивность. Скручивание проводов батареи снижает их индуктивность.
Сопротивление в выводах батареи будет иметь эффект, аналогичный индуктивности, поэтому эти провода должны быть толстыми.
Также некоторые люди хотят поставить амперметр на выводы аккумулятора. Следует сопротивляться искушению: в частности, простые автомобильные амперметры обладают высокой индуктивностью.
Простые контроллеры (например, используемые для моторизованных сумок для гольфа) обычно обходятся без дорогостоящего основного конденсатора и полагаются на емкость аккумулятора. Вам это может сойти с рук — наши ранние Eagle и Egret являются такими контроллерами. Однако необходимо краткое объяснение эффектов. Чтобы проиллюстрировать это, график напряжения батареи, который можно увидеть с помощью осциллографа, подключенного непосредственно к источнику питания батареи на клеммах контроллера. Масса прицела находится на отрицательной шине.
Сверху — вид «прицела» на положительный аккумулятор, внизу — отрицательный полюс двигателя (который переключается контроллером). Для наглядности формы сигнала были сильно подчищены: на практике на сигнале много «грязного» звона. Показан источник питания 12В.
Для наглядности формы сигнала были сильно подчищены: на практике на сигнале много «грязного» звона. Показан источник питания 12В.Мы соединяем форму волны в точке, где нет тока батареи: выходная мощность двигателя высока, а ток рециркулирует в маховике. В точке A включается полевой МОП-транзистор контроллера, отводя ток двигателя от батареи. Но выводы батареи имеют индуктивность! Ток батареи не может начаться немедленно, поэтому выводы батареи падают на полные 12 В, а напряжение контроллера гаснет до тех пор, пока индуктивность выводов не сможет зарядиться, что и происходит в точке B. Время AB зависит от тока и индуктивности контура батареи и может быть значительную часть времени цикла!
Затем в точке C нижний MOSFET резко отключается, прерывая ток. Ток двигателя не проблема, он продолжает течь, а маховик должен убедиться, что это так! Но резко остановить ток батареи нельзя — поэтому он возражает в виде большого всплеска напряжения. Этот всплеск нарастает до тех пор, пока что-то не дает: в этом случае он достигает напряжения лавинного пробоя MOSFET, и MOSFET его зажимает.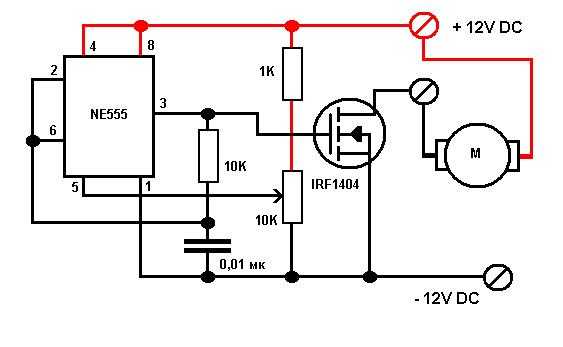 Вы можете легко увидеть напряжение фиксации с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1/2Li², хранящаяся в индуктивности контура батареи, значительно ниже безопасной повторяемой энергии лавины.
Вы можете легко увидеть напряжение фиксации с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1/2Li², хранящаяся в индуктивности контура батареи, значительно ниже безопасной повторяемой энергии лавины.
Проблема: рассчитать индуктивность контура батареи практически невозможно даже для инженера. Для игрока сделать это — ну, сложно. Таким образом, производитель просто поставляет контроллеры известному набору клиентов, которые используют их стандартными способами, и решает проблемы по мере их возникновения на эмпирической основе. Это всегда вопрос нетехнического заказчика, пытающегося получить что-то даром: нужен главный конденсатор. Для некоторых приложений вы действительно можете обойтись без! Но это определенно «сходит с рук»!
В контроллерах с главным конденсатором большинство (но не все) перебоев питания сглаживаются конденсатором. Тем не менее, вы увидите положительное превышение и звон, поскольку ток батареи прерывается.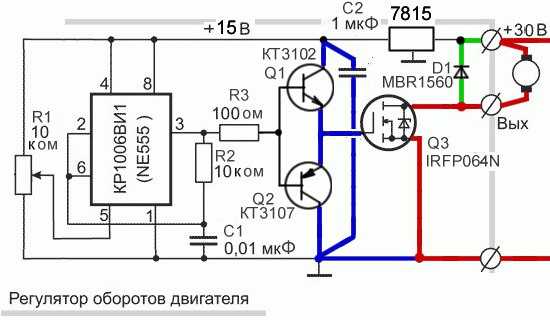
ШИМ и нагрев двигателя
Популярная «бабушкина сказка» состоит в том, что ШИМ заставляет двигатель нагреваться больше, чем чистый постоянный ток. Как и большинство бабьих сказок, это происходит от частичной правды, взращенной непониманием. «Миф» возникает потому, что если частота равна слишком низкий , ток является прерывистым (или, по крайней мере, переменным в ШИМ-сигнале), потому что индуктивность двигателя не может должным образом поддерживать ток в течение периода выключения сигнала. Таким образом, ток двигателя будет импульсным, а не непрерывным. Средний ток будет определять крутящий момент, но нагрев будет интегралом от квадрата тока (нагрев пропорционален I²R) — «форм-фактор» тока будет больше единицы. Чем ниже частота, тем выше ток пульсаций и больше нагрев.
Итак, рассмотрим упрощенный случай, когда ток либо включен, либо выключен. Если ток течет, скажем, в течение 1/3 времени, и вам требуется крутящий момент от двигателя, эквивалентный крутящему моменту, заданному 1 ампером, то вам явно нужен средний ток 1 ампер. Чтобы сделать это с рабочим циклом 33%, у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Чтобы сделать это с рабочим циклом 33%, у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Теперь сила тока 3 ампера дает в 9 раз (в квадрате) больший эффект нагрева, чем 1 ампер.
Но если 3 ампера текут только 1/3 всего времени — значит нагрев двигателя 9раз за 1/3 времени — или в 3 раза больше, чем постоянный 1 ампер! Говорят, что этот сигнал имеет «форм-фактор» 3.
Однако, если частота повторения импульсов достаточно высока, индуктивность двигателя вызовет эффект маховика, и ток станет стабильным. Например, двигатель Линча имеет индуктивность всего 39 мкГн (это один из двигателей с самой низкой индуктивностью, которые я знаю) и сопротивление 0,016 Ом. «Постоянная времени» для цепи L-R равна L/R, что (для двигателя Линча) дает 2,4 мс. Для SEM DPM40P4 (1 кВт) индуктивность составляет 200 мкГн, а сопротивление 40 мОм, что дает постоянную времени 5 мс.
Как правило, во избежание лишней математики период повторения импульсов должен быть значительно короче постоянной времени двигателя.