
Шаговый двигатель википедия
Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения шаги ротора. Первые шаговые двигатели появились в х годах XIX века и представляли собой электромагнит, приводящий в движение храповое колесо. За одно включение электромагнита храповое колесо перемещается на величину зубцового шага храпового колеса. Храповые шаговые двигатели и в настоящее время находят довольно широкое применение [1]. Конструктивно шаговые электродвигатели состоят из статора , на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.

Содержание:
- Портал технической поддержки
- Двигатель постоянного тока (ДПТ)
- Драйвер двигателя L9110S
- Шаговый двигатель 28BYJ-48
- Шаговый Двигатель Pdf
- RAMPS 1.4/ru
- Вентильный двигатель
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Крутящий момент шагового двигателя (замер тесты )
Портал технической поддержки
Реальная шаговая скорость T Однако все это не помогает мне определить, какой должна быть реальная скорость моего степпера. Дополнительные параметры прошивки загромождают мой начинающий мозг еще больше и я еще не слишком углубился в это. Более высокое напряжение помогает быстрее поднять ток, поэтому крутизна увеличения тока также может ограничивать максимальную применимую частоту.
Дополнительные параметры прошивки загромождают мой начинающий мозг еще больше и я еще не слишком углубился в это. Более высокое напряжение помогает быстрее поднять ток, поэтому крутизна увеличения тока также может ограничивать максимальную применимую частоту.
Сама частота передается от платы контроллера к драйверу двигателя, поэтому устанавливается во встроенном программном обеспечении. В целом, кроме того, что имеет смысл использовать в настройке 3D-принтера, каковы определяющие факторы шаговых скоростей, которые могут быть реализованы, и как они преобразуются в реальные значения для наших принтеров? Также мне было бы интересно узнать, как определяющие факторы влияют на надежность и качество печати независимо от механических трудностей, возникающих при скорости печати.
Тем не менее, я думаю, что этот вопрос является уместным и достаточно конкретным, чтобы 3D-печать существовала здесь вместе. Скорость генерации шага пределы будут зависеть от прошивки и используемой платы контроллера.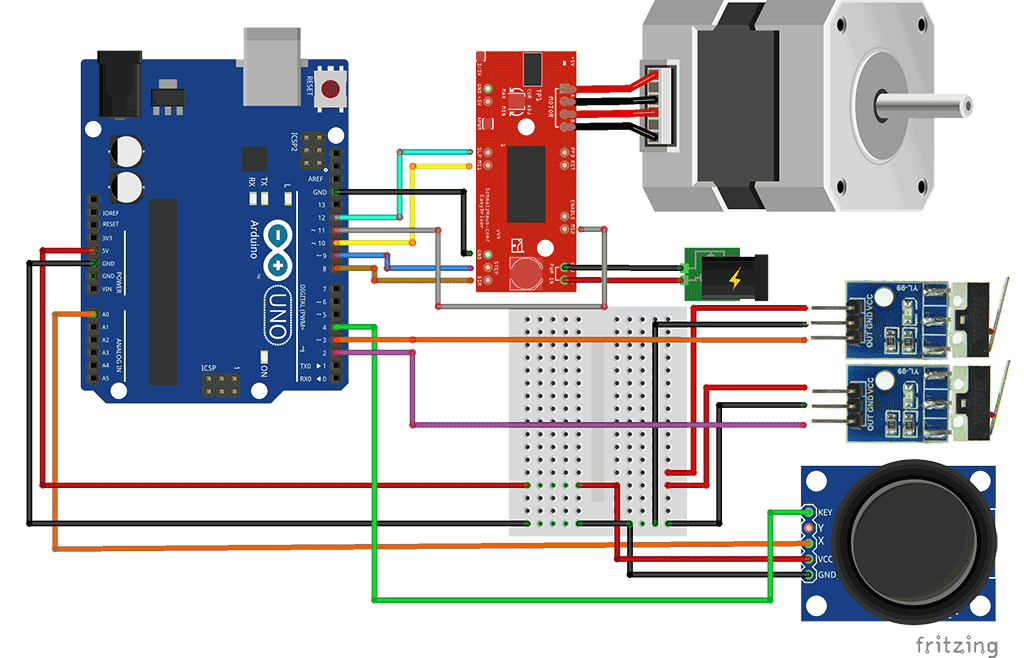
Вероятно, в любом случае это будет более высокая частота вращения, чем мы хотим запустить двигатель, так что это не очень сильный предел. Это довольно медленно. Планировщики движений встроенного программного обеспечения могут дополнительно ограничивать скорость двигателя, увеличивая и уменьшая скорость до поворотов и поворотов.
Если геометрия модели имеет много крутых поворотов, целевые скорости, заданные gcode, скорее всего, никогда не будут достигнуты. Только длинные прямые пути будут иметь достаточное время для достижения скорости. Вы можете сами убедиться в этом, распечатав очень маленькую модель с различными скоростями подачи и выбрав время фактической продолжительности печати: в определенный момент увеличение заданной скорости не повлияет на фактическое время печати.
Другое ограничение, которое навязывают некоторые прошивки, — это необходимость безопасного замедления до остановки в пределах длины всех команд движения в очереди планировщика. Это позволяет принтеру корректно обрабатывать внезапные потери ввода, например, если хост-компьютер прекращает передачу команд USB или на SD-карте возникает ряд ошибок чтения.
Если принтер просто резко останавливается на полной скорости, когда у него заканчиваются команды, он может потерять позицию и испортить печать. Принимая во внимание, что если он может замедляться до безопасной скорости остановки, он может возобновить работу после возобновления потока команд. С точки зрения фактического поведения двигателя, индуктивность и обратная ЭДС вводят значительные ограничения, поскольку они уменьшают крутящий момент двигателя при более высоких оборотах.
В этом диапазоне ограничитель тока ограничивает ток катушки. На правой стороне кривой ток не может достичь цели, прежде чем он должен быть отключен для следующего шага.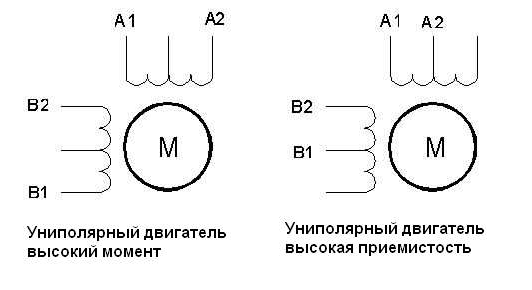 Это снижает напряженность поля и, следовательно, крутящий момент. Для практического обсуждения ограничений скорости мы можем упростить ситуацию, предполагая, что напряжение обратной ЭДС противодействует напряжению возбуждения, приложенному к катушкам.
Это снижает напряженность поля и, следовательно, крутящий момент. Для практического обсуждения ограничений скорости мы можем упростить ситуацию, предполагая, что напряжение обратной ЭДС противодействует напряжению возбуждения, приложенному к катушкам.
И когда напряжение противо-ЭДС составляет примерно ту же величину, что и напряжение возбуждения, может возникнуть значительная нестабильность двигателя из-за сложных эффектов обратной связи между положением ротора и эффективным напряжением катушки.
В приложениях с обратной связью с обратной связью по положению и высокопроизводительными драйверами, которые могут подавлять различные В нестабильных режимах может быть нормальным запускать шаговый двигатель по кривой крутящего момента при очень высоких оборотах.
В более типичных применениях 3D-принтеров с разомкнутым контуром, как правило, лучше придерживаться части кривой крутящего момента с низким числом оборотов в минуту, прежде чем индуктивность и обратная ЭДС действительно повлияют на поведение двигателя.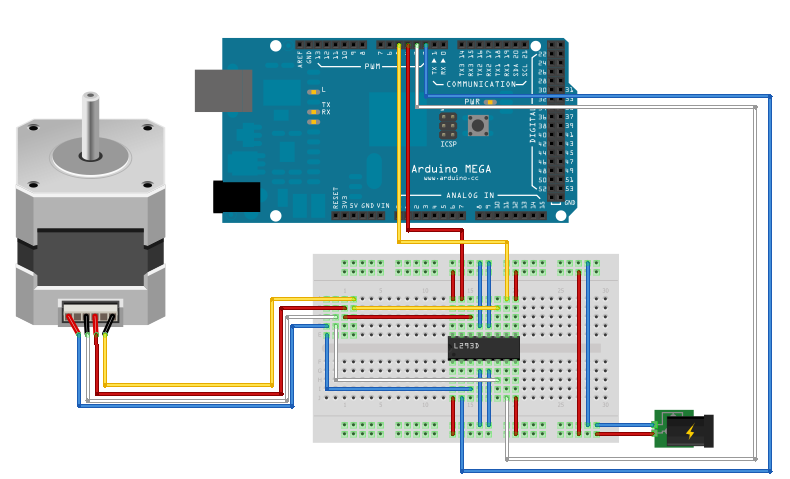
Потеря слишком большого крутящего момента может легко означать пропуск шагов и потерю позиции, что испортит отпечаток. Другим важным эффектом для степперов является среднечастотный резонанс. Это не обычный механический резонанс, а фактически эффект электромеханического резонанса. Это довольно сложно, но короткое объяснение состоит в том, что степпер имеет собственный градусный фазовый сдвиг между положением и крутящим моментом, и когда скорости возрастают до точки, где индуктивность катушки вводит дополнительный градусный фазовый сдвиг между током катушки и приложенным напряжением, электромеханическая система имеет чрезвычайно нестабильную задержку фазы на градусов и, таким образом, создает отрицательную петлю обратной связи.
Это может быстро понизить крутящий момент двигателя до тех пор, пока двигатель не потеряет синхронность с приложенным напряжением водителя и остановится. Резонанс средней полосы возникает только тогда, когда ток катушки ограничен индуктивностью. Это не может произойти в диапазоне привода с постоянным током, потому что между приложенным напряжением и током катушки недостаточно запаздывания фазы.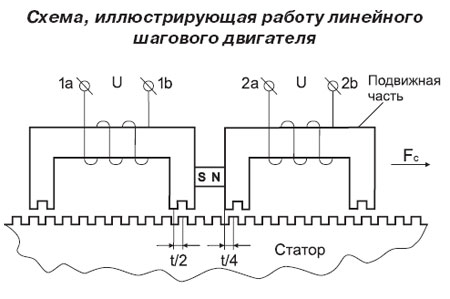 К сожалению, измеренные кривые крутящего момента, доступные от производителей, почти никогда не показывают резонансные зоны, потому что кривые получаются при нагрузке двигателей тормозами с трением, которые демпфируют любой резонансный эффект от здания.
К сожалению, измеренные кривые крутящего момента, доступные от производителей, почти никогда не показывают резонансные зоны, потому что кривые получаются при нагрузке двигателей тормозами с трением, которые демпфируют любой резонансный эффект от здания.
В то время как нагрузка на привод 3D-принтера почти полностью инерционная ускоряет массу , которая гораздо более подвержена резонансу. Высокопроизводительные драйверы могут автоматически обнаруживать и демпфировать среднечастотный резонанс, но это типично низкочастотный резонанс. Стоимость драйверов для 3D-принтеров не имеет этой возможности. Обычно целесообразно избегать входа в диапазон оборотов, где может возникнуть резонанс в средней полосе.
Это легко сделать, придерживаясь левой стороны кривой крутящего момента в рабочей области постоянного тока. Это обеспечивает высокий крутящий момент и хорошую стабильность. В качестве конкретного примера рассмотрим популярный степпер Kysan с источником питания 24 В.
Чтобы поддерживать высокий крутящий момент и избегать резонанса в средней полосе, мы хотели бы поддерживать частоту вращения около или менее. Более высокие скорости возможны, но могут возникнуть проблемы с надежностью. Эта скорость, конечно, предполагает использование блока питания 24 В для согласования с кривой измеренного крутящего момента: блок питания 12 В будет иметь значительно меньшую максимальную скорость, прежде чем индуктивность начнет ограничивать ток катушки, примерно вдвое меньше быстро.
Более высокие скорости возможны, но могут возникнуть проблемы с надежностью. Эта скорость, конечно, предполагает использование блока питания 24 В для согласования с кривой измеренного крутящего момента: блок питания 12 В будет иметь значительно меньшую максимальную скорость, прежде чем индуктивность начнет ограничивать ток катушки, примерно вдвое меньше быстро.
Более высокое напряжение питания значительно увеличивает максимальную эффективную скорость двигателя. Эта выходная диаграмма симулятора показывает, как индуктивность и обратная ЭДС препятствуют току катушки достичь цели:.
Просто слишком сложно применять простые уравнения или эмпирические правила с какой-либо точностью. Эти электрические эффекты и пределы генерации микропрограммного обеспечения, вероятно, будут двумя основными ограничениями скорости двигателя для большинства принтеров.
Конечно, скорость расплавления пластика, как правило, значительно ограничивает скорость печати ниже истинных пределов скорости двигателя, но это другой вопрос.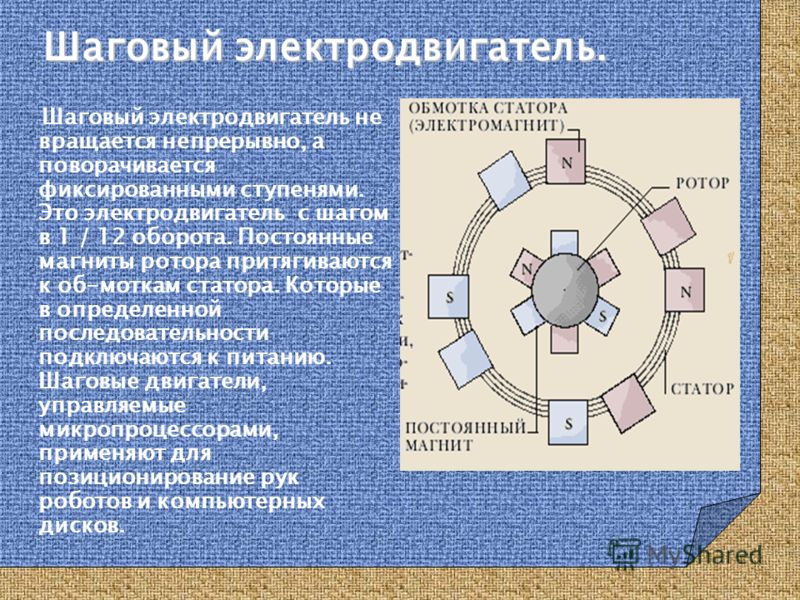 На данный момент мы можем просто сказать, что максимальная скорость двигателя, как правило, не важна для печати на типичных декартовых принтерах.
На данный момент мы можем просто сказать, что максимальная скорость двигателя, как правило, не важна для печати на типичных декартовых принтерах.
Тем не менее, есть несколько случаев, когда они, вероятно, влияют на производительность принтера:. Метки Категории. Smart вопрос. Всего ответов: 1. Ответ выбранный как решение:. Четыре основных ограничения скорости двигателя в 3d-принтере: Ограничения частоты генерации прошивки Эффекты планирования движения прошивки Потеря крутящего момента и точности из-за индуктивности катушки двигателя и эффектов обратной ЭДС Среднечастотный резонанс Скорость генерации шага пределы будут зависеть от прошивки и используемой платы контроллера.
Некоторые примеры: Marlin на МГц 8-битном Atmega может запускать шаговое прерывание только на частоте Гц, не перегружая процессор и не блокируя другие важные алгоритмы например, планирование движения. Repetier на том же Atmega может запускать шаговое прерывание на частоте Гц, потому что оно оптимизировано больше для скорости выполнения, чем Marlin. Здесь необходимо рассмотреть два отдельных эффекта: Катушки двигателя являются индукторами, что означает, что существует разрыв первого порядка между приложенным напряжением и током катушки.
Здесь необходимо рассмотреть два отдельных эффекта: Катушки двигателя являются индукторами, что означает, что существует разрыв первого порядка между приложенным напряжением и током катушки.
При высоких скоростях шага не хватает времени, чтобы полностью зарядить катушку до ее максимального тока, прежде чем следующий шаг потребует понижения тока вниз. Без развития полного тока катушки на каждом шаге крутящий момент теряется. Каждый двигатель также является генератором, и вращение ротора создает напряжение обратной ЭДС внутри катушек двигателя.
Этот сигнал напряжения накладывается поверх сигнала напряжения привода с фазовым сдвигом, зависящим от положения ротора относительно положения возбуждения катушки. Проще говоря, это напряжение пытается затормозить двигатель: оно всегда делает все, что замедляет работу двигателя. Это означает, что оно противодействует приложенному напряжению привода, когда двигатель прикладывает прямой крутящий момент, или помогает приложенному напряжению привода, когда двигатель прикладывает тормозной момент.
Тем не менее, есть несколько случаев, когда они, вероятно, влияют на производительность принтера: Линейные дельты, когда вагонеткам может потребоваться в несколько раз быстрее, чем эффектор для определенных направлений движения редукторы с высоким коэффициентом редукции например, более 5: 1 для высоких скоростей отвода ходовые винты с коротким шагом или с цельной резьбой , которым требуются высокие скорости вращения для достижения умеренные линейные скорости. Комментарии TextGeek T Метки электроника скорость шаговый микрошаговый двигатель.
Рассказать всем. Telegram для связи Условия и положения Политика конфиденциальности.
Двигатель постоянного тока (ДПТ)
Накопитель на гибких магнитных дисках англ. Приводы позиционирования головок и вращения и система считывания-записи управляется электронной схемой, размещённой на печатной плате, которая находится внутри корпуса дисковода. Для считывания с поверхности диска. Двигатель, который осуществляет перемещения головок по диску в двух направлениях с определенным приращением, или шагом, называется шаговым двигателем.
Как запустить шаговый двигатель без электроники своими руками Драйвер шагового двигателя (Troyka-модуль) [Амперка / Вики].
Драйвер двигателя L9110S
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от до угол шага 3. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении рис. Гибридный двигатель. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок.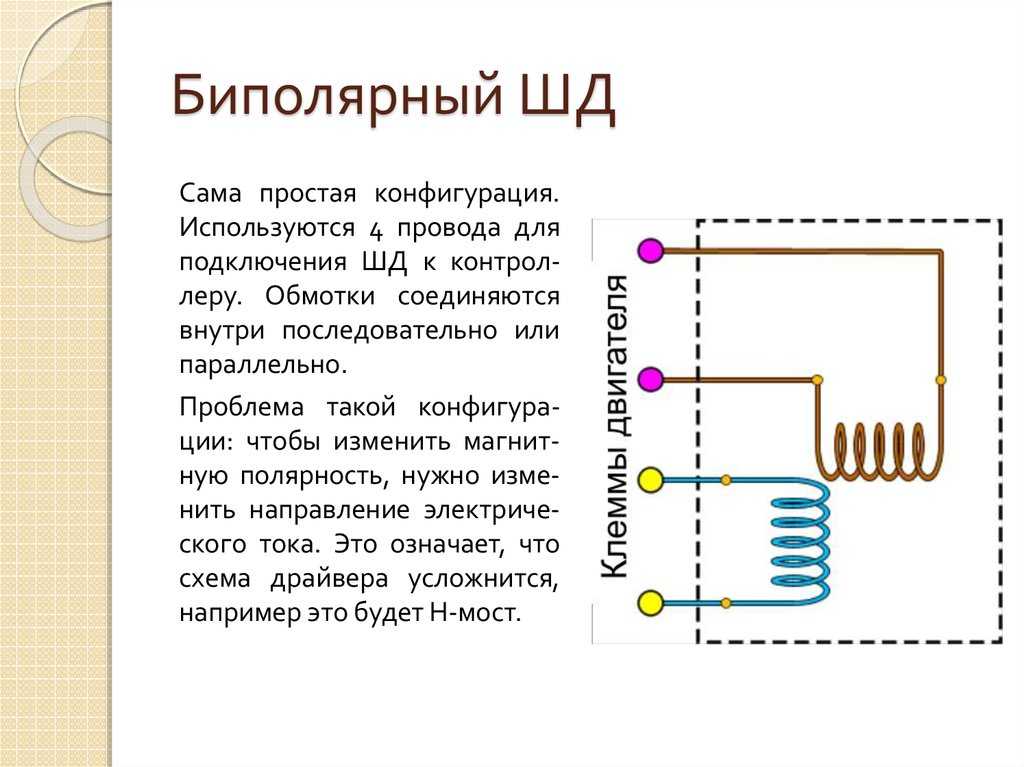 Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Шаговый двигатель 28BYJ-48
Шаговый электродвигатель Лавета — разновидность шагового электродвигателя , применяемая в электрических преимущественно кварцевых часах [1]. Внешне двигатель Лавета похож на двигатель с экранированными полюсами , и также может иметь одну рабочую обмотку. Этот тип двигателя запатентовал французский инженер Мариус Лавет [fr]. Также как и у двигателя с экранированными полюсами , рабочая обмотка этого двигателя как правило состоит из одной линейной катушки.
База знаний.
Шаговый Двигатель Pdf
В статье содержатся базовые сведения о работе шагового двигателя и рекомендации по способу подбора. В настоящее время рынок наполнен предложениями самых разнообразных двигателей, для самых разнообразных приложений, что немудрено запутаться при выборе шагового двигателя, даже если вы подготовились и изучили свойства шаговых моторов, узнали их основное свойство терять момент с ростом скорости вращения и, оценив момент инерции нагрузки, приведенной к валу, примерно определили какой крутящий момент на каких скоростях нужно получить от шаговика.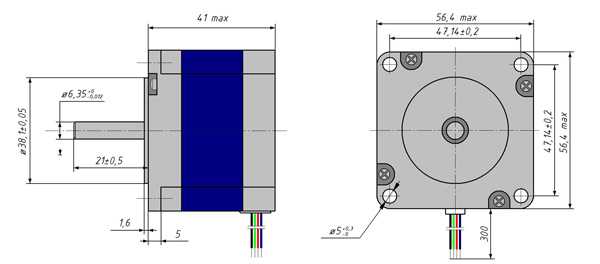 Так как все же выбрать шаговый двигатель и на что необходимо первым делом посмотреть при покупке? Ни один из типов двигателей не имеет каких-то радикальных преимуществ перед другими. Но у каждого из них есть свои небольшие особенности. Так, 3-фазные двигатели более скоростные — имеют меньший момент, чем биполярные такого же размера, но сохраняют его лучше, тем самым их хорошо использовать с редукторами, в скоростных передачах.
Так как все же выбрать шаговый двигатель и на что необходимо первым делом посмотреть при покупке? Ни один из типов двигателей не имеет каких-то радикальных преимуществ перед другими. Но у каждого из них есть свои небольшие особенности. Так, 3-фазные двигатели более скоростные — имеют меньший момент, чем биполярные такого же размера, но сохраняют его лучше, тем самым их хорошо использовать с редукторами, в скоростных передачах.
RAMPS 1.4/ru
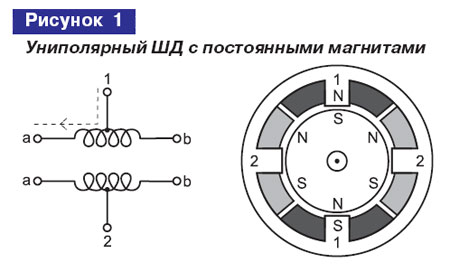
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами дискретно. Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя. Шаговые двигатели состоят из ротора подвижная часть и статора неподвижная часть. На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого двигатель с постоянными магнитами или магнитомягкого реактивный двигатель материала.
связанный, соотносящийся по значению с существительным шаг ◇ Шаговый механизм. ◇ Шаговый двигатель. ◇ Шаговое напряжение. ◇ Шаговый.
Вентильный двигатель
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Войти Регистрация. Поддержать автора Отправить деньги.
Ответ: Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства драйвер шагового двигателя , можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ Числовое программное управление , фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов.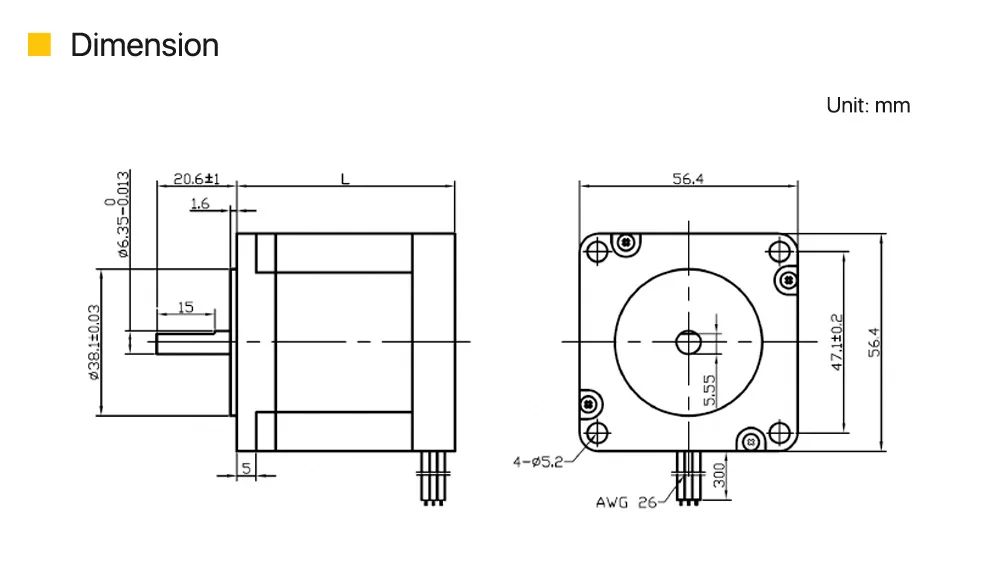
Войти через. Найдите лучшие предложения hot пнв 57е википедия.
Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения шаги ротора. Конструктивно шаговые электродвигатели состоят из статора , на котором расположены обмотки возбуждения, и ротора выполненного из магнито-мягкого ферромагнитного материала или из магнито-твёрдого магнитного материала. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов.
Реальная шаговая скорость T Однако все это не помогает мне определить, какой должна быть реальная скорость моего степпера. Дополнительные параметры прошивки загромождают мой начинающий мозг еще больше и я еще не слишком углубился в это. Более высокое напряжение помогает быстрее поднять ток, поэтому крутизна увеличения тока также может ограничивать максимальную применимую частоту.
Дополнительные параметры прошивки загромождают мой начинающий мозг еще больше и я еще не слишком углубился в это. Более высокое напряжение помогает быстрее поднять ток, поэтому крутизна увеличения тока также может ограничивать максимальную применимую частоту.
Выбор сервопривода
- ШАРИКО-ВИНТОВЫЕ ПЕРЕДАЧИ
- ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ
- СЕРВОПРИВОД
- ШАГОВЫЙ ПРИВОД
- ИСТОЧНИКИ ПИТАНИЯ
- ЭНКОДЕРЫ
- ЭЛЕКТРОШПИНДЕЛИ ДЛЯ СТАНКОВ
- ГИБКИЕ КАБЕЛЬ-КАНАЛЫ
- ЛИНЕЙНЫЕ НАПРАВЛЯЮЩИЕ
- Основные понятия
- Рекомендации по выбору
Шаговый электропривод – это исполнительное электромеханическое устройство, предназначенное для осуществления мерного перемещения исполнительного органа какого-либо механизма. В отдельных случаях с помощью шагового привода осуществляют регулирование скорости вращения механизма. Электрический шаговый привод – комплектное устройство, состоящее из шагового двигателя и драйвера шагового привода. Драйвер шагового привода, как правило, является связующим элементом между обмотками шагового двигателя, питающей сетью и контроллером верхнего уровня, который осуществляет управление приводом.
Драйвер шагового привода, как правило, является связующим элементом между обмотками шагового двигателя, питающей сетью и контроллером верхнего уровня, который осуществляет управление приводом.
По сравнению с сервоприводами с обратной связью (с энкодерами на вале двигателя) шаговый привод решает ту же задачу позиционирования, однако он более дешевый
Шаговые приводы обладают некоторыми характеристиками, значение и смысл которых представлены ниже.
Шаговый двигатель характеризуется удерживающим моментом (синхронизирующий момент, holding torque). Удерживающий момент – предельный момент в остановившемся состоянии, и протекании номинального тока. При приложении к валу момента равного удерживающему шаговый двигатель перестает работать. Рабочий нагрузочный момент двигателя должен быть, по крайней мере, в 2 – 3 раза меньше значения удерживающего момента.
Уменьшение предельного вращающегося момента в зависимости от скорости. Важная характеристика, учет которой позволяет обеспечить работоспособность шагового привода во всем диапазоне рабочих скоростей. Производитель, как правило, дает зависимость момента на валу шагового двигателя от частоты полных – full (или половинных — half) его шагов. При этом следует помнить, что указывается предельный момент на валу, и что максимальный рабочий нагрузочный момент должен быть в 2 – 3 раза меньше этого предельного значения
Производитель, как правило, дает зависимость момента на валу шагового двигателя от частоты полных – full (или половинных — half) его шагов. При этом следует помнить, что указывается предельный момент на валу, и что максимальный рабочий нагрузочный момент должен быть в 2 – 3 раза меньше этого предельного значения
Номинальный рабочий ток двигателя. Ток, который может протекать через обмотки шагового двигателя в длительном режиме работы. Этот ток создаёт удерживающий момент, значение которого определено в спецификациях шагового двигателя. Величина тока пропорциональна значению удерживающего момента. Температура корпуса шагового двигателя, при протекании через его обмотки тока с номинальным значением, может достигать температуры 70…80 °C. Этот факт необходимо учитывать в прецизионных системах, когда такой нагрев двигателя может привести к не желаемым температурным деформациям других элементов системы.
Рабочий ток привода в остановленном состоянии. В некоторых драйверах шагового привода имеется настройка этого тока (STOP current) отдельно от настройки рабочего тока в состоянии движения (RUN current).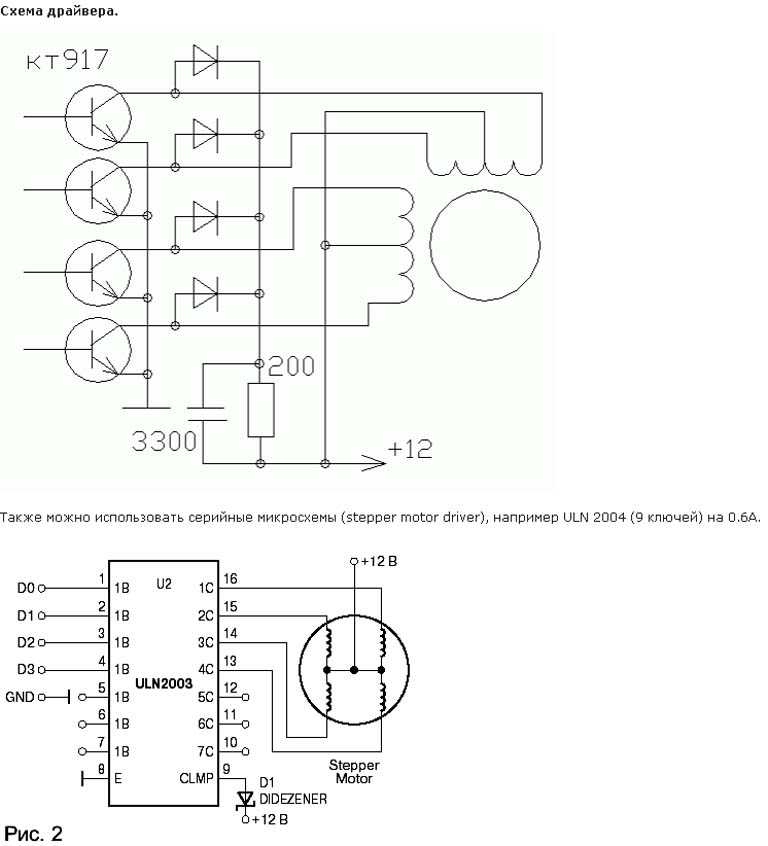 Это сделано для того, чтобы уменьшить тепловые нагрузки на шаговый двигатель в остановленном состоянии, когда уменьшенного тока хватает для того, чтобы обеспечить «стояние» двигателя под нагрузкой. При возобновлении движения ток снова возрастает до уровня рабочего тока.
Это сделано для того, чтобы уменьшить тепловые нагрузки на шаговый двигатель в остановленном состоянии, когда уменьшенного тока хватает для того, чтобы обеспечить «стояние» двигателя под нагрузкой. При возобновлении движения ток снова возрастает до уровня рабочего тока.
Количество фаз шагового двигателя. Различают 2-х, 3-х и 5-ти фазные шаговые двигатели. Увеличение количества фаз двигателя улучшает плавность хода привода, и, что особенно важно, подавляет резонансные явления в приводной системе, однако увеличивает стоимость не только двигателя, но и шагового драйвера. Определить количество фаз шагового двигателя возможно по значению полного шага: 0.9° и 1.8° соответствуют 2-х фазному двигателю, 1.2° и 1.5° — трехфазному, 0.72° — пятифазному. Значение полного шага обычно приводится в паспортной табличке двигателя.
Количество выводов обмоток. Для двухфазных шаговых двигателей, как правило, различают – 4-х выводные двигатели, 6-ти выводные и 8 выводные. Наиболее универсальные – это 8-ми выводные двигатели. Если выводы такого двигателя соответствующим образом соединить, то можно получить аналог как 6-ти выводного двигателя, так и 4-х выводного. Более того, полу обмотки 8-ми выводного двигателя можно соединять как последовательно, так и параллельно, и тем самым получать шаговый двигатель либо с большим моментом, либо с большей скоростью вращения. Однако эта универсальность является и недостатком, поскольку имеется вероятность неправильного подключения полу обмоток не совсем опытным пользователем. Большинство недорогих драйверов китайского производства имеют 4-е выходные клеммы для подключения обмоток шаговых двигателей.
Наиболее универсальные – это 8-ми выводные двигатели. Если выводы такого двигателя соответствующим образом соединить, то можно получить аналог как 6-ти выводного двигателя, так и 4-х выводного. Более того, полу обмотки 8-ми выводного двигателя можно соединять как последовательно, так и параллельно, и тем самым получать шаговый двигатель либо с большим моментом, либо с большей скоростью вращения. Однако эта универсальность является и недостатком, поскольку имеется вероятность неправильного подключения полу обмоток не совсем опытным пользователем. Большинство недорогих драйверов китайского производства имеют 4-е выходные клеммы для подключения обмоток шаговых двигателей.
Трехфазные двигатели шаговые двигатели имеют либо три вывода, либо шесть. В последнем случае обмотки можно включать по схемам «звезда/треугольник (delta)» изменяя соотношение момент/скорость такого двигателя. Один из наиболее известных производителей, использующий 3-х фазный шаговый привод – Siemens. Однако с драйвером Siemens хорошо работают трехфазные шаговые двигатели китайских производителей.
Пятифазные шаговые двигатели могут иметь либо пять выводов, либо десять. В последнем случае обмотки можно включать по схемам «звезда/пентагон», изменяя соотношение момент/скорость такого двигателя. Пятифазные шаговые приводы широко представлены на российском рынке продукцией южно-корейской фирмы Autonics. Как плавило, данный тип продукции используется в приводных высокоточных системах.
Напряжение электропитания драйвера шагового привода. Различают драйверы шагового привода, которые могут питаться от сети с напряжением 220В переменного тока, так и драйверы с питанием от шин постоянного тока с различной величиной напряжения (наиболее часто используется напряжение 24В). Драйверы с напряжением питания 220В переменного тока – наиболее дорогие, однако, обеспечивают наиболее широкий диапазон скоростей вращения шагового двигателя. Существенный недостаток таких драйверов – они приводят к повышенному нагреву шагового двигателя. Это происходит из-за повышенной пульсации тока в обмотках двигателя. Питание повышенным напряжением постоянного тока (до 80 вольт и более) также приводит к широкому диапазону достигаемых скоростей в приводе, однако требует специального вторичного источника питания для этих целей.
Питание повышенным напряжением постоянного тока (до 80 вольт и более) также приводит к широкому диапазону достигаемых скоростей в приводе, однако требует специального вторичного источника питания для этих целей.
Микрошаг. Режим микрошага (иногда этот режим называют режимом дробления шага двигателя) используют для увеличения плавности хода и уменьшения резонансных явлений приводной шаговой системы (и как следствие этого, увеличения быстродействия). Можно говорить и об увеличении точности позиционирования, но только в том случае, если шаговый двигатель сильно недогружен, практически отсутствует сухое трение, и в кинематической цепочке от вала шагового двигателя до исполнительного органа приводного механизма нет упругих инерционных элементов.
Формат управляющих импульсов. Различают следующие форматы управляющих командных импульсов, поступающих от контролера верхнего уровня на командные входы драйвера шагового привода:
— P/D (pulse/direction, puls/sign, импульс/направление, 1P) – управляющие импульсы представлены двумя последовательностями импульсов, первая из которых задаёт величину перемещения, а вторая определяет направление перемещения;
— CW / CCW (по часовой стрелке / против часовой стрелки, 2P) — управляющие импульсы представлены двумя последовательностями импульсов, первая из которых задаёт величину перемещения при вращении в одну сторону, а вторая — величину перемещения при вращении в другую сторону;
— A&B (A/B, квадратурный формат, мастер-энкодер, две сдвинутых меандры) — управляющие импульсы представлены двумя последовательностями, количество фронтов сигналов в которых задают величину перемещения (иногда количество импульсов только одной из последовательностей задаёт величину перемещения, в этом случае эффекта «учетверения импульсов» не происходит), а опережение фазы одной из последовательностей по сравнению с другой — определяет направление вращения двигателя.
Большинство драйверов шагового привода способны работать с любым из вышеперечисленных форматов командных импульсов. «Вес» каждого управляющего импульса (то есть, величина перемещения вала шагового двигателя от действия одного импульса на командных входах драйвера) определяется коэффициентом дробления шага (величиной микрошага), который устанавливается в драйвере шагового привода либо с помощью микропереключателей, либо путем программирования этого драйвера. Дискрета перемещения зависит не только от коэффициента дробления шага, но и от типа двигателя, величины его полного шага. Например, при величине полного шага 1.8° и коэффициенте дробления шага – 256, при подаче одного управляющего импульса вал двигателя должен повернуться на 25,31 угловые секунды
Максимальная частота командных импульсов. Предельная частота импульсов, до которой драйвер шагового привода способен работать не «проглатывая» их. При этом скорость вращения шагового двигателя не обязательно будет близка к предельным значениям, поскольку эта скорость связана с частотой командных импульсов через коэффициент дробления шага двигателя.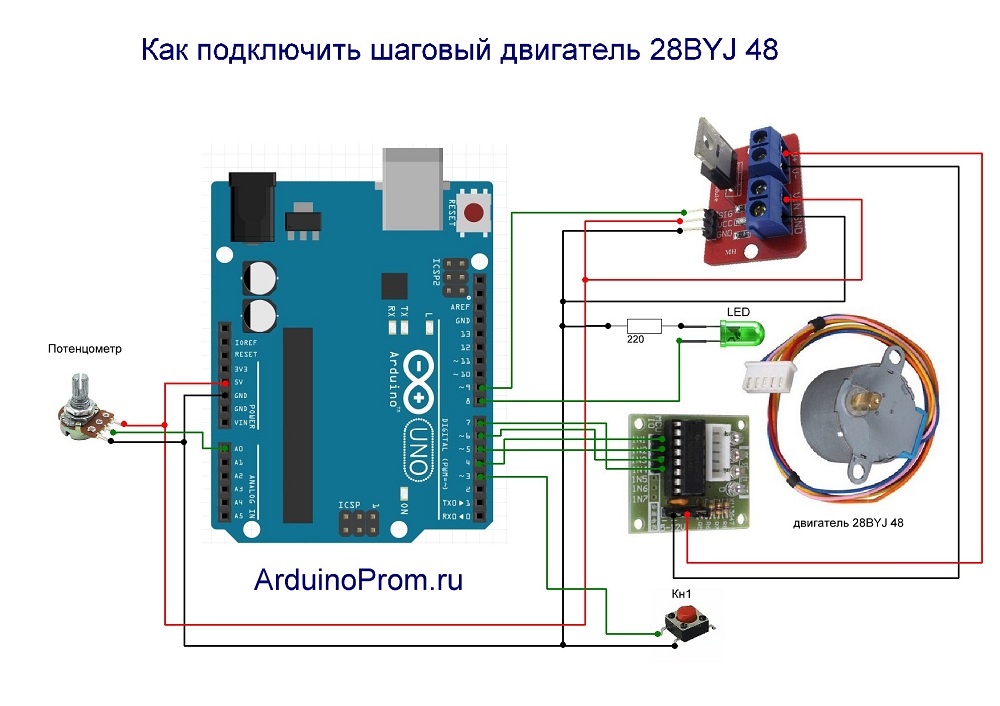
Частота приёмистости (стартовая частота) – это частота подачи управляющих импульсов, соответствующая частоте полных (или половинных) шагов, с которой двигатель может сразу начать движение. В паспортных данных приводится частота приемистости соответствующая «пустому» двигателю, то есть, без нагрузки на вале, в том числе инерционной. При увеличении нагрузки частота приёмистости падает. Определить теоретически, какую частоту можно подавать в качестве стартовой, невозможно. Значение этой частоты для конкретной нагрузки определяется методом «проб и ошибок» при настройке системы.
Режим работы. Различают режимы:
— управления положением;
— регулирования скорости.
Управление положением осуществляется шаговым приводом с помощью управляющих импульсов того или иного формата, поступающих от контроллера верхнего уровня (host controller). Однако некоторые производители шаговых проводов предлагают режим регулирования скорости вращения шагового двигателя. Сигнал задания скорости в этом случае является аналоговым сигналом. Двигатель вращается со скоростью пропорциональной величине аналогового сигнала. Перенастройка величины скорости может осуществляться как в режиме реального времени, так и априори, только до момента пуска привода в работу.
Шаговый привод в режиме регулировки скорости может быть использован, например, как простой привод, вращающий нагрузку с постоянной медленной скоростью, без каких либо дополнительных управляющих устройств верхнего уровня.
Дискретные входы. Эти входы воспринимают 2-х уровневый электрический сигнал. Сигналы позволяют управлять драйвером шагового привода. По умолчанию дискретные входы воспринимают отсутствие сигнала, как неактивный уровень сигнала. С помощью этих входов можно осуществить: пуск привода, сбросить аварийное состояние привода, блокировать действие поступающих командных импульсов, изменить направление вращения двигателя и пр.
Степень защиты корпуса. Определяет защиту корпуса от проникновения внутрь твердых предметов, пыли, а также воды. Защита обозначается двумя цифрами после латинских букв IP. Чем больше цифры, тем сильнее защита. Степень – IP20 говорит о том, что для защиты прибора требуется установка его в шкаф, оболочка последнего обеспечивает защиту приборов от пыли и влаги.
Выбор шагового привода по моменту, который требуется для вращения нагрузки.
В обычных применениях момент нагрузки, тормозящий вращение двигателя, не должен превышать пороговое значение равное 30 … 50% от паспортного значения удерживающего момента. Причем проверка этого соотношения должна быть проведена во всём диапазоне требуемых скоростей вращения.
Выбор шагового привода по предельно возможной скорости движения нагрузки.
Во всём диапазоне скоростей момент нагрузки двигателя должен быть заведомо меньше значения вращающего момента, который может развить шаговый двигатель на данной конкретной скорости. Любое превышение момента нагрузки над предельным моментом двигателя приведет к «опрокидыванию» этого двигателя, пропуску шагов, потерю им заданного положения. Шаговый двигатель останавливается, драйвер «не чувствует» этого и вся система позиционирования становится неработоспособной. Следует внимательно и скрупулёзно решить этот вопрос на основании частотных характеристик, предоставляемых производителем двигателя и, в частности, выбрать необходимое напряжение питания драйвера шагового привода.
Выбор шагового двигателя по типу его вала.
Вал шагового двигателя может быть двух различных исполнений:
— выступающий вал;
— полый вал.
Во втором случае выступающий вал механизма вставляется в полый вал двигателя и для того, чтобы не повредить подшипники двигателя, его корпус следует крепить к станине с помощью специальных не жестких пластин, препятствующих проворачиванию корпуса двигателя.
Выбор шагового привода по возможности устранения резонансных явлений в системе.
Шаговый привод отличается от сервопривода с датчиком обратной связи повышенной предрасположенностью к, так называемым, резонансным явлениям в системе. Поведение шагового двигателя с нагрузкой на вале похоже на поведение колебательного звена, усложненное наличием всякого рода нелинейностей (от люфтов, электромагнитных нелинейностей, сухого трения и пр.). Если частота командных импульсов, вынуждающих шаговый привод переходить от одного положения к другому, начинает совпадать с частотой собственных колебаний в электромагнитной системе шагового двигателя, то возникают резонансные явления. Этот резонанс делает движение в приводной системе непредсказуемым. Привод либо останавливается, либо едет на неопределённой скорости в неопределенном направлении. Причем точку резонанса сложно вычленить и обойти, поскольку она, как правило, может изменяться, например, в зависимости от положения суппорта станка относительно его ходового винта. Некоторые продвинутые драйверы шаговых приводов имеют систему подавления резонансных колебаний, в отдельных случаях следует использовать их. Часто подавлению резонансных колебаний способствует наличие простого толстого резинового диска на втором вале шагового двигателя (кстати, за этот диск удобно вручную прокручивать вал шагового двигателя, когда он обесточен, если, конечно, это требуется).
МАРКИРОВКА ШАГОВЫХ ДВИГАТЕЛЕЙ STEPLINE
|
SL |
XX |
ST ST H |
XXX |
– |
XXX |
X |
M* |
X |
|
|
Габарит двигателя 39-NEMA16; 42-NEMA17; 57-NEMA23; |
|
Длина корпуса двигателя, мм |
|
Фазный ток, в сотых долях ампера |
Количество выводов обмоток |
М — полный шаг двигателя 0. * отсутствие буквы — полный шаг 1.8° |
Количество валов: А — один; В — два |
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ШАГОВЫХ ДВИГАТЕЛЕЙ STEPLINE
|
Характеристика |
Величина |
|
Погрешность величины углового шага |
±5% |
|
Допустимые отклонения сопротивления |
±10% |
|
Допустимые отклонения индуктивности |
±20% |
|
Температура корпуса |
80℃ Max |
|
Рабочая температура окружающей среды |
-20℃~+50℃ |
|
Сопротивление изоляции |
100MΩMin при 500VDC |
|
Электрическая прочность |
500VAC в течении 1 мин |
|
Радиальные биения вала, мм |
0. |
|
Осевые биения вала, мм |
0.08Max. (нагрузка силой 450Г) |
 02Max.(нагрузка силой 450Г)
02Max.(нагрузка силой 450Г)|
Модель |
Диаметр вала, (мм) |
Длина L корпуса, (мм) |
Ток фазы, (А) |
Ном. напряжение, (В) |
Сопротивление фазы, (Ω) |
Индуктивность фазы, (мГн) |
Удерживающий момент, (кГс.см) |
Остаточный момент (Гс.см Max) |
Момент инерции ротора, (г.см²) |
Масса двигателя, |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
39h32H-0286A |
5 |
22 |
0. |
4.2 |
15 |
8.0 |
0.47 |
60 |
12 |
0.12 |
|
SL39ST38-0504 |
5 |
38 |
0.5 |
12 |
45 |
24 |
2.9 |
180 |
24 |
0.25 |
|
SL42STh50-1684 |
5 |
40 |
1. |
2.8 |
1.68 |
3.4 |
4.0 |
220 |
54 |
0.28 |
|
FL42STh57-0806B |
5 |
47.5 |
0.8 |
6.0 |
7.5 |
6.7 |
3.17 |
200 |
68 |
0.35 |
|
SL42STh58-1684 |
5 |
48 |
1. |
3.4 |
2 |
3.8 |
5.2 |
280 |
68 |
0.38 |
|
SL42STh44-1204M(0.9°) |
5 |
34 |
1.2 |
3.24 |
2.7 |
5.2 |
2.3 |
200 |
35 |
0.22 |
|
SL42STh44-1334M(0. |
5 |
33.5 |
1.33 |
2.8 |
2.1 |
2.5 |
2.2 |
120 |
35 |
0.22 |
|
SL57STH51-2804 |
6.35 |
51 |
2.8 |
2.3 |
0.83 |
2.3 |
10.1 |
360 |
275 |
0. |
|
SL57STH56-2804 |
6.35 |
56 |
2.8 |
2.5 |
0.9 |
2.5 |
12.6 |
400 |
300 |
0.7 |
|
SL57STH76-2804 |
6.35 |
76 |
2.8 |
3.2 |
1.13 |
3.6 |
18. |
680 |
480 |
1.0 |
|
SL57STh212-3004 |
8 |
112 |
3.0 |
3.9 |
1.3 |
6.5 |
30 |
1200 |
800 |
1.7 |
|
SL86STH65-5904 |
14 |
65 |
5.9 |
1. |
0.29 |
1.7 |
33 |
1400 |
1000 |
1.7 |
|
SL86STH82-5504 |
14 |
82 |
5.5 |
1.9 |
0.35 |
3 |
50 |
1600 |
1500 |
2.5 |
|
SL86HS100-5004 |
14 |
100 |
5. |
2.5 |
0.5 |
4 |
68 |
2000 |
2100 |
3.2 |
|
SL86STh218-6004 |
14 |
118 |
6.0 |
3.6 |
0.6 |
6 |
85 |
2400 |
2700 |
3.7 |
|
SL86STh256-6204 |
14 |
156 |
6. |
3.6 |
0.75 |
9 |
122 |
3200 |
4000 |
5.3 |
 28
28 68
68 68
68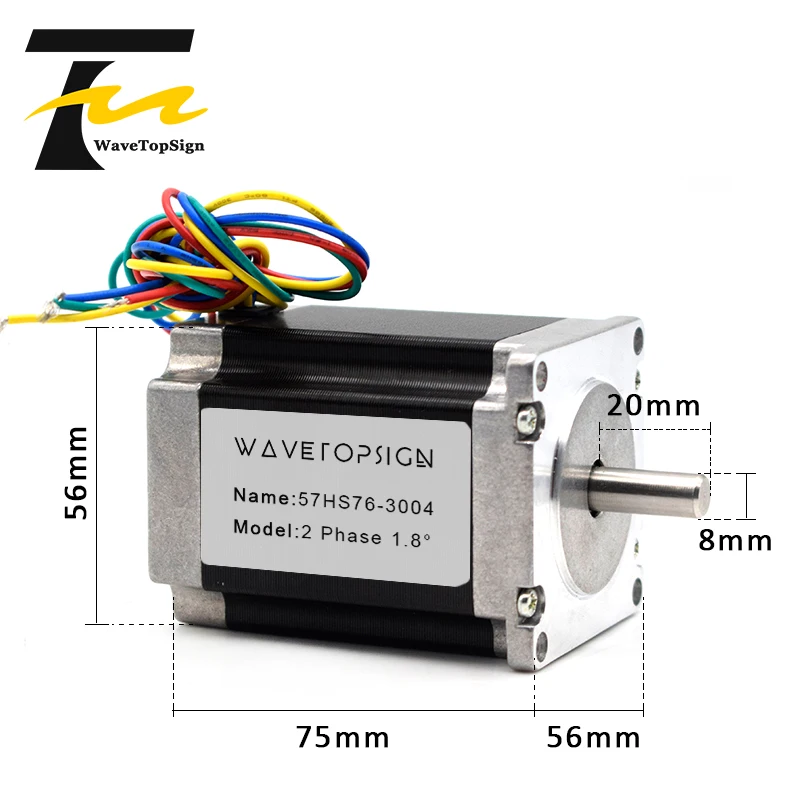 9°)
9°) 65
65 9
9 7
7 0
0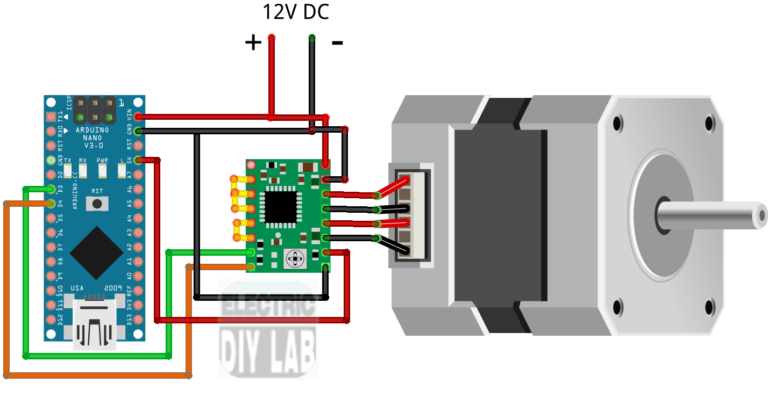 2
2
ООО «ЗЕТЕК» 2023. Все права защищены.
Сайт компании www.zetek.ru
Пока пусто
Пока пусто Оформить заказ
Корзина0
Избранное0
Просмотренное0
Вверх
Драйвер шагового двигателя — RepRap
Чтобы запустить шаговый двигатель, необходимо использовать
- возможно A4988
- или, возможно, DRV8825
- или, возможно, Trinamic TMC2130
Вы можете купить любой из них в магазине по вашему выбору.
Содержимое
- 1 иначе, читайте дальше,
- 2 Управление шаговыми двигателями
- 2.
 1 Драйвер шагового двигателя
1 Драйвер шагового двигателя - 2.2 Драйверы шаговых двигателей на базе микроконтроллеров
- 2.
- 3 Драйверы шаговых двигателей с открытым исходным кодом
- 3.1 АВРСТМД
- 3.2 Доктор Игуана
- Драйвер шагового двигателя 3.3 RepRap v1.x
- 3.4 Драйвер шагового двигателя RepRap v2.x
- 4 Драйверы шаговых двигателей и контроллеры шаговых двигателей
- 5 драйверов ШИМ и шаговых двигателей
- 6 чипов драйвера шагового двигателя
- 7 драйверов шаговых двигателей
- 8 Компенсация среднечастотного резонанса
- 9 Поиск и устранение неисправностей
- 9.1 Модули Pololu
- 9.2 защита
- 10 Дальнейшее чтение
 1 Драйвер шагового двигателя
1 Драйвер шагового двигателяв противном случае, читайте дальше,
- чип драйвера шагового двигателя или
- микроконтроллер и, опционально, один или два полноценных чипа h-bridge.
Управление шаговыми двигателями
Драйвер шагового двигателя
Эти микросхемы отделяют питание двигателей от питания Arduino. Arduino не может обеспечить достаточное количество энергии для прямого питания шаговых двигателей. Вот почему вы должны использовать отдельные микросхемы, которые действуют как клапаны, управляющие вращением двигателя.
Arduino не может обеспечить достаточное количество энергии для прямого питания шаговых двигателей. Вот почему вы должны использовать отдельные микросхемы, которые действуют как клапаны, управляющие вращением двигателя.
Другим преимуществом чипов шаговых драйверов является то, что они обеспечивают дробных шагов. Это помогает сгладить движение шагового двигателя. Без дробных шагов шаговые двигатели могут иметь тенденцию вибрировать или резонировать при определенных оборотах.
Драйверы шаговых двигателей на базе микроконтроллеров
Драйверы шаговых двигателей на базе микроконтроллеров могут достигать очень высоких скоростей вращения шаговых двигателей. Используя микроконтроллер, можно полностью контролировать то, как именно каждая отдельная катушка подается под напряжение внутри двигателя. Это абсолютно необходимо для получения высоких скоростей, потому что по мере увеличения скорости время срабатывания катушек должно быть идеально синхронизировано. Цитата из доктора Игуаны:
- Если вы когда-нибудь толкали кого-то на качелях, вы знаете, что небольшой, своевременный толчок может заставить этого человека раскачиваться все выше и выше. Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
 Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.Чтобы обрабатывать ток выше, чем может позволить микропроцессор, контроллер должен использовать полный чип H-моста.
Обычно Н-мост используется для управления старым добрым двигателем постоянного тока, но в данном случае чипы Н-моста используются для точного управления количеством электричества, поступающего на каждую отдельную катушку шагового двигателя. Таким образом, для биполярных шаговых двигателей требуется 2 микросхемы на двигатель.
Драйверы шаговых двигателей с открытым исходным кодом
AVRSTMD
AVRSTMD — драйвер шагового двигателя с открытым исходным кодом на базе микроконтроллера. Он использует процессор atmega48 и два чипа h-bridge с ограниченным током National Semiconductor LMD18245T.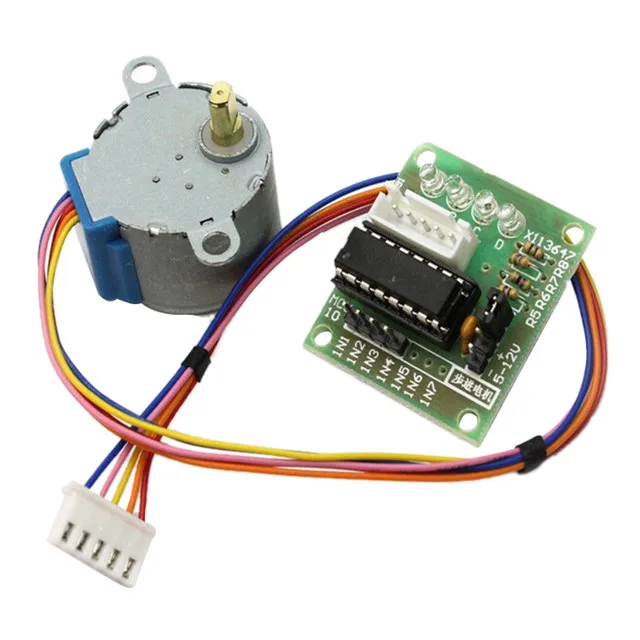
Dr. Iguana
Драйвер шагового двигателя Dr. Iguana основан на микроконтроллере dsPic33 и двух чипах L298N H-Bridge. Он может развивать скорость до 800 об/мин. Очень хороший источник информации о шаговых драйверах микроконтроллеров можно найти на его веб-сайте здесь вместе со всеми схемами, файлами gerber, исходным кодом и спецификацией для шагового драйвера.
Доктор Игуана. «Лучший драйвер шагового двигателя своими руками». Серия страниц (и видео), на которых даны советы по проектированию высокоскоростных драйверов шаговых двигателей.
Драйвер шагового двигателя RepRap v1.x
- устарело*
Первое поколение драйверов шаговых двигателей RepRap.
(Примечание: эти платы использовались в коллекции электроники 2-го поколения.) Используется комбинированный драйвер шагового двигателя L297/L298. Полушаг. Выдерживает до 2А. Все сквозное отверстие. Хороший, солидный водитель. Он использует некоторые старые технологии, так что он не такой модный, как более новые драйверы шаговых двигателей, но он выполняет свою работу. Прочтите страницу документации здесь
Прочтите страницу документации здесь
Драйвер шагового двигателя RepRap v2.x
- устарело*
Второе поколение драйверов шаговых двигателей RepRap. (Примечание: эти платы использовались в коллекции электроники 3-го поколения, но их можно было обновить до поколения 2.)
Использует чип Allegro A3982, который делает кучу полезных вещей и делает плату намного проще. Это также снижает цену на 10 долларов по сравнению с серией v1.x. Он может выдерживать до 2А и работает в полушаге. Единственным недостатком является то, что это SMT, что может немного пугать людей. Это все большие детали SMT, поэтому их довольно просто паять, особенно с помощью паяльной пасты/горячей пластины. Прочтите страницу документации здесь.
Трехосевой драйвер шагового двигателя PSMD имеет все те же разъемы и является совместимой по выводам альтернативой драйверу шагового двигателя RepRap v2.x.
Драйверы шаговых двигателей и контроллеры шаговых двигателей
Для работы шагового двигателя обычно требуются две вещи: контроллер для создания сигналов шага и направления (обычно ±5 В) и схема привода, которая может генерировать ток, необходимый для привода двигателя.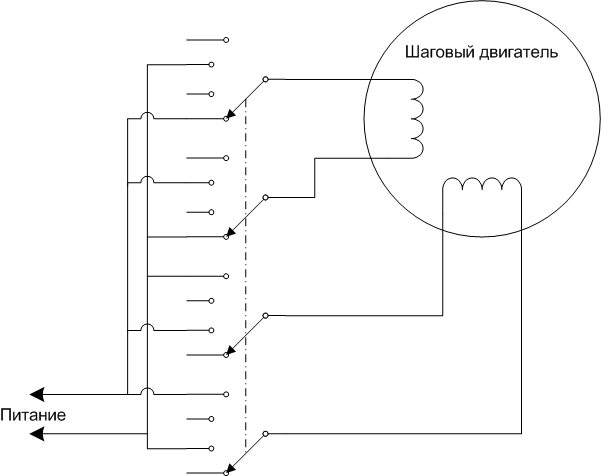 . В некоторых случаях очень маленький шаговый двигатель может управляться напрямую от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.
. В некоторых случаях очень маленький шаговый двигатель может управляться напрямую от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.
Контроллер шагового двигателя управляет тремя проводами, традиционно помеченными как «шаг», «направление», «земля», которые передают информацию о движении к драйверу шагового двигателя. (Часто эти 3 линии оптоизолированы на переднем конце драйвера шагового двигателя). Шаговый контроллер обычно представляет собой чисто цифровое логическое устройство и требует относительно небольшой мощности.
Драйвер шагового двигателя подключается к 4 толстым проводам шагового двигателя. Он содержит большие силовые транзисторы и требует толстого силового кабеля для источника питания постоянного тока, потому что вся мощность для привода двигателей проходит через него.
Драйверы ШИМ и шаговых двигателей
Подавляющее большинство драйверов шаговых двигателей подключены к какому-либо контроллеру с 3-проводным интерфейсом: контроллер подает импульс на вывод STEP, чтобы переместить двигатель на один шаг (*), контроллер устанавливает вывод DIR, чтобы выбрать, шаг — это шаг по часовой стрелке или шаг против часовой стрелки и общий контакт GND.
Из Википедии:Широтно-импульсная модуляция: Широтно-импульсная модуляция (ШИМ) — очень эффективный способ обеспечения промежуточного количества электроэнергии между полностью включенным и полностью выключенным. Простой выключатель питания с типичным источником питания обеспечивает полную мощность только при включении. ШИМ — это сравнительно новый метод, который стал практичным благодаря современным электронным переключателям питания.
Драйверы шаговых двигателей обычно работают, уменьшая напряжение питания с помощью встроенной микросхемы ШИМ. Эти чипы требуют незначительной вспомогательной схемы (это основное, за что вы платите, покупая драйвер шагового двигателя). Сами чипы PWM обычно имеют цену за единицу ниже 10 долларов США, в основном в зависимости от их номинального тока.
Драйвер прерывания, также известный как драйвер ограничения тока, поддерживает работу двигателя и ток в двигателе на безопасном уровне, даже при управлении двигателем «3 В» от источника питания «24 В». Все перечисленные здесь микросхемы имеют «тепловое отключение».
Все перечисленные здесь микросхемы имеют «тепловое отключение».
(*) Многие микросхемы также имеют встроенный микрошаг. Когда микрошаговый режим включен, каждый импульс на выводе STEP перемещает двигатель на один микрошаг.
Микросхемы драйвера шагового двигателя
Вот список микросхем драйвера шагового двигателя (самые новые сначала):
| Производитель | Модель | Пиковый ток | Пакет | Дополнительные примечания |
|---|---|---|---|---|
| Тринамик | «Шаговый драйвер и контроллер 5041» | 1,1 А (?) | QFN48 (7×7) | управляет осью Z в T-Bone.[1][2] |
| Тринамик | Контроллер движения TMC4361 + драйвер шагового двигателя Trinamic TMC2660 | 2,6 А (?) | QFP44 | управляет осями X, Y, E в T-Bone.[3][4] |
| Аллегро | А4989 | 10 А | ЦСОП38 | A4989 предназначен для управления N-канальными МОП-транзисторами с внешним питанием. А4989 в Powerlolu (Powerlolu) управляет полевыми МОП-транзисторами IRLR024N, которые позволяют ему управлять 10 А. Вывод, совместимый с A3986. А4989 в Powerlolu (Powerlolu) управляет полевыми МОП-транзисторами IRLR024N, которые позволяют ему управлять 10 А. Вывод, совместимый с A3986. |
| STMicroelectronics | Л6470 | 7 А | HTSSOP28 или POWERSO36 | Дважды использовался в RepRap. Прошивка RepRap на базе Marlin с поддержкой L6470. Репрап печатная плата. Файл:Шаговый двигатель GE версии 0.8b.sch, Файл:Шаговый двигатель GE версии 0.8b.brd, Файл:Reprap.lbr.
Библиотека Arduino L6470 на Github. |
| STMicroelectronics | L9942 | 1,3 А | PowerSSO24 | СПИ. Диагностические флаги для обнаружения опрокидывания, предупреждения о перегреве, отключения при перегреве, открытой нагрузки, перегрузки. Полный, 1/2-, 1/4- и 1/8-шаговый режимы. |
| Тринамик | TMC249A [5][6] | 4 А | SO28 | СПИ. Флаги состояния для обнаружения опрокидывания, перегрузки по току, разомкнутой нагрузки, перегрева, предварительного предупреждения о перегреве, пониженного напряжения.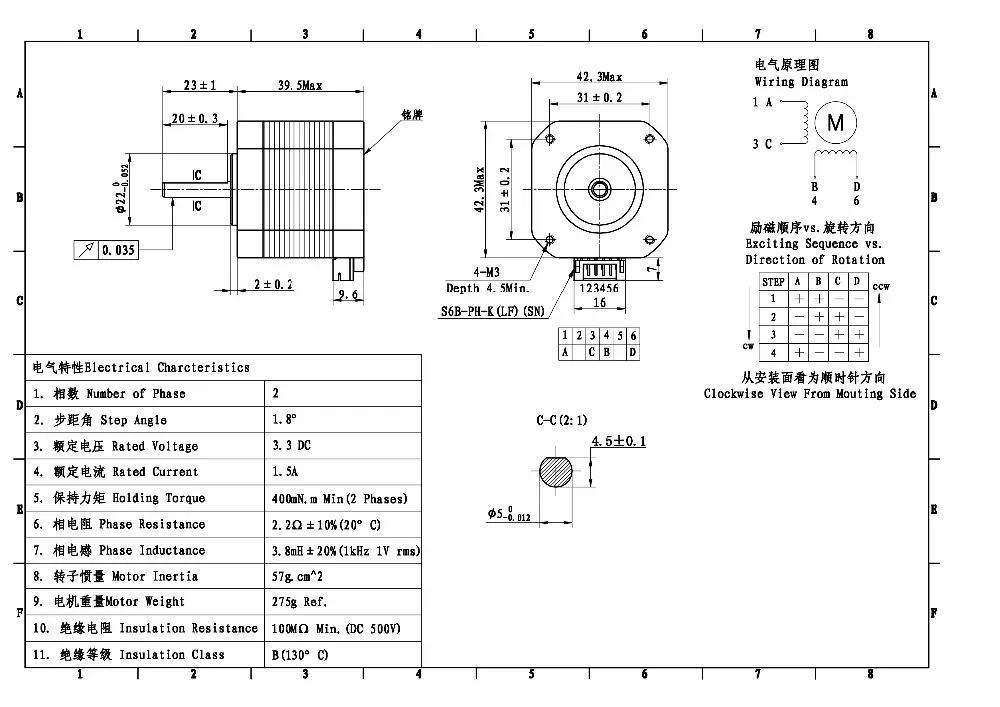 измерение нагрузки. Управляет 8 внешними полевыми МОП-транзисторами — в техническом описании приведен список рекомендуемых силовых транзисторов. Сменная замена для TMC239. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы (1/64-шаг с дополнительными компонентами). измерение нагрузки. Управляет 8 внешними полевыми МОП-транзисторами — в техническом описании приведен список рекомендуемых силовых транзисторов. Сменная замена для TMC239. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы (1/64-шаг с дополнительными компонентами). |
| HHBYtech | THB7128 | 3,3 А | ХЗИП19 | Рекомендуется для электроники Gen7T. По сравнению с TB6560AHQ лучшее расположение контактов (например, все контакты разъема двигателя с одной стороны, как у TB6600HG) и менее требовательный к дизайну окружающей печатной платы. |
| Тошиба | ТБ6560АХК | 3,5 А | ХЗИП25 и ХКФП64 | Используется в электронике Gen7T, Sanguish и Sanguinoshiba, а также в драйвере шагового двигателя с открытым исходным кодом для экологии с открытым исходным кодом [нужна ссылка] . См. также: Контроллер платы драйвера шагового двигателя с ЧПУ 4 Axis TB6560. |
| Тошиба | ТБ6600ХК; ТБ6600ХГ | 4,5 А | ХЗИП25-П-1. 00Ф 00Ф | Используется в драйвере шагового двигателя PiBot TB6600. Протестировано на GEN7V1.4-1.41 и PiBot для Repetier V1.0-1.4. По сравнению с TB6560AHQ лучшее расположение контактов (например, все контакты разъема двигателя с одной стороны, как у THB7128). |
| Аллегро | А3967 | 0,75 А | СОИК | Используется в платах Easy Driver, продаваемых на Sparkfun. Не уверен, что их можно использовать в RepRap, но они хороши для экспериментов. Немного маломощный, всего 750 мА/фаза. |
| Аллегро | А3977 | 2,5 А | ПЛКК или ТССОП | Заброшено в драйвере шагового двигателя версии 2.0. |
| Аллегро | А3979 | 2,5 А | ЦСОП | Заброшен из-за крошечного размера в версии 2.1. |
| Аллегро | А3982 | 2 А | СОИКВ | Улучшено по сравнению с версией 1.2 в версии 2.2. Также используется в драйвере шагового двигателя версии 2. 3. 3. |
| Аллегро | А3992 | 1,5 А | DIL или TSSOP | Используется в электронике поколения L. |
| Аллегро | А4984 | 2 А | ТССОП или КФН | Используется в Stepsticka4984. Полный, 1/2-, 1/4- и 1/8-шаговый режимы. защита двигателя от короткого замыкания. Почти идентичен A4988, за исключением того, что в нем отсутствует контакт «M3», который указывает на микрошаг 1/16, и некоторые люди предпочитают этот пакет TSSOP пакету QFN. |
| Аллегро | А4983 | 2 А | КФН | Продукт снят с производства, заменен на A4988. Используется в коммутационной плате A4983. |
| Аллегро | А4988 | 2 А | КФН | Используется в платах драйверов шаговых двигателей Pololu и драйвере G3D. Идентичен и совместим по выводам с A4983, но также имеет подтяжку на M1 и защиту двигателя от короткого замыкания. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы. |
| Техас Инструментс | ДРВ8811 | 2,5 А | ХТСОП | Используется в электронике 6-го поколения. Вероятно, поэтому прошивка FiveD была изменена. |
| STMicroelectronics | Л297 | DIP20 или SO20 | Преобразует входы «step, dir» в 6-контактные выходы «последовательности фаз», которые подключаются к двойному полному мосту, такому как L298. Полный и полушаговый режимы. Последним драйвером шагового двигателя, который использовал это, был драйвер шагового двигателя 1.2. | |
| STMicroelectronics | Л298 | 4 А | Мультиватт15 или PowerSO20 | Двойной полный мост. При правильном подключении к чему-то вроде L6506 или L297, как и в Драйвере шагового двигателя 1.2, L298 может быть использован для построения драйвера прерывающего двигателя (с ограничением по току). Когда его сенсорные выходы напрямую подключены к земле, как в Valkyrie Redux, ограничение тока отсутствует. |
| Техас Инструментс | СН754410 | 1 А | ДИП 16 | Двойной полный мост. «Улучшенная функциональная замена … L293». Без ограничения тока (кроме теплового отключения). |
| STMicroelectronics | Л293Д | 0,6 А | Powerdip 16 или SO20 | Двойной полный мост. Множественные могут быть сложены друг на друга, чтобы разделить силу тока. Без ограничения тока. |
| Техас Инструментс | ДРВ8825 | 2,5 А | 28HTSSOP | ДРВ8825; используется в Replicape, некоторых платах AZSMZ Mini и некоторых (всех?) платах Azteeg X5. До 1/32 шага. |
Столбец «Пиковый ток» дико оптимистичен. (Видеть «Миф о водителе» ).
Корпуса для сквозных отверстий считаются наиболее простыми для пайки вручную («HZIP», «DIL», «DIP», «Powerdip» и т. д.).
«SOIC» и «PLCC» — это относительно простые в пайке корпуса для устройств поверхностного монтажа. Корпуса для поверхностного монтажа «TSSOP», «QFP» и «QFN» трудно паять вручную.
Корпуса для поверхностного монтажа «TSSOP», «QFP» и «QFN» трудно паять вручную.
В резервной копии веб-архива есть хорошая сравнительная таблица и обзор микросхем драйверов микрошагов: «Обзор драйверов биполярных микрошагов по состоянию на август 2013 года» (через «Альтернативные драйверы шаговых двигателей?»).
Драйверы шаговых двигателей
Поиск драйверов шаговых двигателей может быть непростым делом. Драйверы шаговых двигателей RepRap V2.3 очень трудно приобрести в предварительно собранном виде. Строители, обладающие небольшими навыками, могут найти детали и собрать контроллеры. Те, у кого нет навыков или материалов для сборки плат, могут купить обычные драйверы шаговых двигателей. В Европе, как правило, более рентабельно получить предварительно собранные платы, чем покупать детали и выполнять сборку своими руками.
| Производитель | Проверено? | Местоположение | Максимальный ток | Микрошаг | Комментарии |
|---|---|---|---|---|---|
Драйвер шагового двигателя 2. 3 (с использованием A3982) 3 (с использованием A3982) | Да | США | 2 А | 1/2 | Внесен в список для сравнения. |
| Ступенька | Да | Открытый исходный код | 2 А | 1/16 | Совместимость по контактами очень похожие характеристики на плату драйвера шагового двигателя Pololu. |
| СайлентСтепСтик | Да | Открытый исходный код | 1,7 А | 1/16 | Драйвер Trinamic TMC2100. Аппаратное обеспечение, совместимое с StepStick и платой драйвера шагового двигателя Pololu. |
| Плата драйвера шагового двигателя Pololu | Да | США | 2 А | 1/16 | Может сильно нагреваться; требуется активное охлаждение вентилятором или пассивный небольшой радиатор свыше ~0,5 А. |
| МКС TB6600 (с использованием TB6600) | Да | Китай | 4,5 А | 1/1,1/2А,1/2В, 1/4,1/8,1/16 | *Это решение, подходящее для вашего фрезерного станка с ЧПУ и 3D-принтера, позволяет легко преобразовать ваш ЧПУ в 3D-принтер.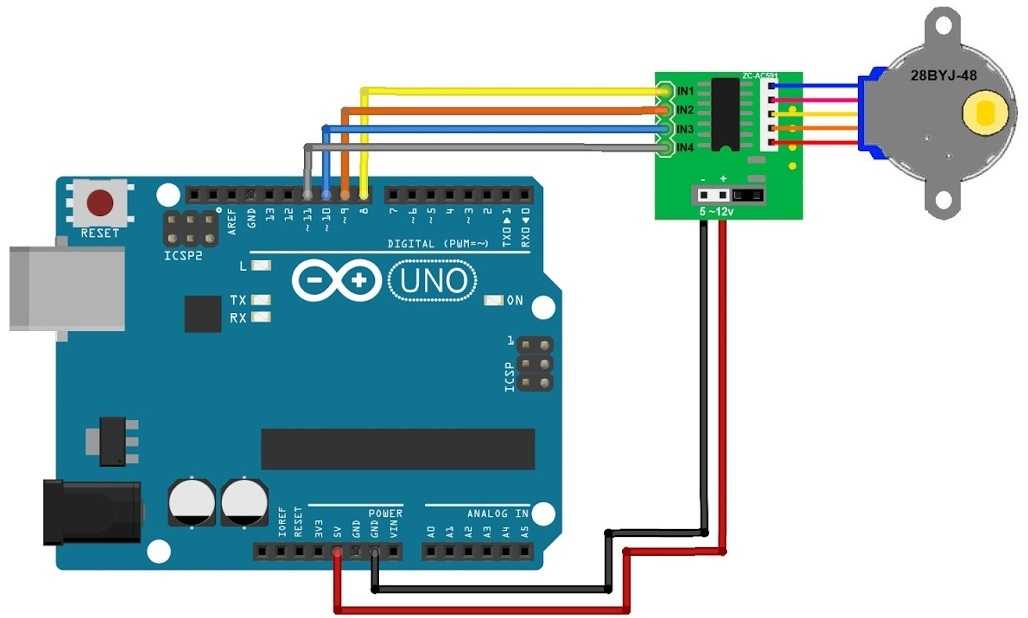 *Предельное входное напряжение: 45 В. *Предельное входное напряжение: 45 В. |
| EasyDriver (с использованием A3967) | Да | США | 0,75 А | 1/8 | Немного слабее по сравнению с другими драйверами, всего 750 мА/фаза. Bothacker использует EasyDriver[7] и сообщает, что его мощности достаточно для Mendel. Рекомендуемые. |
| … ay.com/autohec 4-осевой контроллер драйвера шагового двигателя (с использованием A3977) | Да | США | 2,5 А | 1/8 | 4 шаговых драйвера на одной плате. |
| PiBot_TB6600_Stepper_Driver (с использованием Toshiba 6600HQ) | Да | Китай | 0–4,5 А | 1/1,1/2А,1/2В, 1/4,1/8,1/16 |
|
| DIY ЧПУ | Нет | ГБ | 2,5 А | 1/8 | Может управлять 1 шаговым двигателем; скидка при покупке нескольких. |
| Моторный щит Arduino | Нет | США | 0,6 А | ? | Требуется Arduino в качестве контроллера. Может управлять 2 сервоприводами, 4 двигателями постоянного тока или 2 (биполярными или униполярными) шаговыми двигателями. Веб-сайт отмечает, что вы можете увеличить максимальный ток, вставив (припаяв чип к чипу) еще один L29.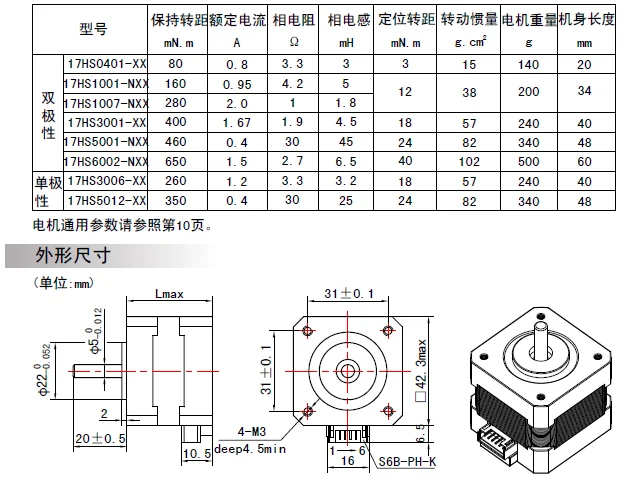 3D-чип поверх первого (и еще один поверх него) 3D-чип поверх первого (и еще один поверх него) |
| … ay.com/?_from=R40&_trksid=p3907.m38.l1313&_nkw=4+axis+TB6560&_sacat=Просмотреть все категории TB6560AHQ на основе | Нет | ГБ/кн. | 1,5–3 А | 1, 1/2, 1/8, 1/16 | Может управлять от 3 до 5 шаговых двигателей в зависимости от модели; читать далее. |
| Клон шагового двигателя 2.3 от kymberlyaandrus | Да | США | 2 А | 1/2 | Та же схема, но физически меньше оригинальной версии. Подстроечный потенциометр не имеет начальной/конечной точки, поэтому регулировка тока может быть более сложной, чем на других досках. Клеммные колодки хороши тем, что не требуют изготовления специальных разъемов. |
| Гекко Драйв | Да | США | 3,5 А | 1/10 (только) | Может управлять 4 шаговыми двигателями |
| Нанотек SMC11 | Да | НЕМЕЦКИЙ | 1,4 А | 1/16 | с охлаждением до 2,5 А |
| LiniStepper от Романа Блэка | нет | США | 3 А | 1/18 и «бесступенчатый» | Открытый исходный код: принципиальная схема, компоновка печатной платы (платы) и программное обеспечение PIC доступны. |
| Шаговый двигатель Tri Duino | ??? | ??? | ??? | ??? | Открытый исходный код |
| A3979прорыв | ??? | ??? | ??? | ??? | ??? |
| грблшилд | Нет | США | 2,5 | 1/8 | 3-осевой контроллер подключается к Arduino Uno или аналогичному |
Сравнение драйверов шаговых двигателей PMinMo.
Компенсация среднеполосного резонанса
Драйверы Gecko имеют функцию, называемую компенсацией среднеполосного резонанса, которая предотвращает остановку шаговых двигателей из-за проблем с резонансом, которые могут возникнуть, когда двигатель вращается в диапазоне 5-15 об/мин. Это может быть очень полезно, например, при управлении шаговыми двигателями на мельнице Tiag. Однако шаговые двигатели в Mendel никогда не работают вблизи этого диапазона, поэтому компенсация резонанса средней полосы не дает никакой пользы для сборки Mendel.
Модули Pololu
- Шаговый двигатель «дрожит»
- Модули Pololu отключаются, когда они слишком горячие. Обеспечить надлежащее охлаждение.
- Шаговый двигатель потребляет слишком много ампер
- Модули Pololu имеют небольшой потенциометр SMD для регулировки тока. Подключайте шаговый двигатель по одному и регулируйте силу тока, пока не будете удовлетворены настройкой.
- Отрегулируйте так, чтобы шаговые двигатели могли удерживать крутящий момент, но не перегревались. Лично я приближаюсь к силе тока, указанной на катушку.
защита
Транзисторы, которые чаще всего выходят из строя в RepRap, — это транзисторы, напрямую подключенные к двигателю. Кажется, в ответ есть три точки зрения:
- позволяют легко заменить эти транзисторы, когда они неизбежно выходят из строя, или
- каким-то образом защищает эти транзисторы, так что они вряд ли выйдут из строя даже в условиях обычной неисправности — Protected Mosfet или .
- оба.
Современные драйверы шаговых двигателей имеют «тепловое отключение» — когда они чувствуют, что им становится слишком жарко, они автоматически все выключают и дают всему остыть. Это может испортить вашу пластиковую печать, но, по крайней мере, не было нанесено необратимого ущерба. (Это не означает, что современные драйверы шаговых двигателей не могут быть окончательно уничтожены; вы просто будете умнее в том, как вы это делаете).
В частности, я слышал, что драйверы двигателя часто выходят из строя, когда двигатель отключается при включенном питании. ( Устранение неполадок # Проблемы с электричеством, Обсуждение: Монотроника, RepRapPro Настройка токов двигателя, RAMPS 1.4 # Предполетная проверка, и т. д.) Что такое режим отказа? Есть ли способ спроектировать драйвер двигателя, чтобы он был невосприимчив к таким отказам? Предпочтительно, чтобы это стоило меньше, чем просто покупка нового «носителя драйвера шагового двигателя» за 11 долларов каждый раз, когда я его выдуваю?
- Шаговый двигатель
- Контур управления двигателем
- У альтернативной электроники есть некоторые соображения по дизайну для людей, проектирующих контроллеры шаговых двигателей и другую электронику.
- В статье «драйвер двигателя» на вики-сайте Open Circuits есть длинный список драйверов шагового двигателя с открытым исходным кодом и соответствующая информация.
- Серия страниц Reprapped Development Board (RDB) — в частности, RDB STP и RDB-STP-001-G-DIY — содержит некоторые идеи о том, как сделать драйверы двигателя оптимизированными для DIY, для обеспечения гибкости и возможности обновления. .
- StepperDriverWithUDN2559 FIXME: добавьте этот чип в приведенный выше список.

Драйвер шагового двигателя — RepRap
Чтобы запустить шаговый двигатель, необходимо использовать
- возможно A4988
- или, возможно, DRV8825
- или, возможно, Trinamic TMC2130
Вы можете купить любой из них в магазине по вашему выбору.
Содержимое
- 1 иначе, читайте дальше,
- 2 Управление шаговыми двигателями
- 2.1 Драйвер шагового двигателя
- 2. 2 Драйверы шаговых двигателей на базе микроконтроллеров
- 3 Драйверы шаговых двигателей с открытым исходным кодом
- 3.1 АВРСТМД
- 3.2 Доктор Игуана
- Драйвер шагового двигателя 3.3 RepRap v1.x
- 3.4 Драйвер шагового двигателя RepRap v2.x
- 4 Драйверы шаговых двигателей и контроллеры шаговых двигателей
- 5 драйверов ШИМ и шаговых двигателей
- 6 чипов драйвера шагового двигателя
- 7 драйверов шаговых двигателей
- 8 Компенсация среднечастотного резонанса
- 9 Поиск и устранение неисправностей
- 9.1 Модули Pololu
- 9.2 защита
- 10 Дальнейшее чтение
 2 Драйверы шаговых двигателей на базе микроконтроллеров
2 Драйверы шаговых двигателей на базе микроконтроллеровв противном случае, читайте дальше,
- чип драйвера шагового двигателя или
- микроконтроллер и, опционально, один или два полноценных чипа h-bridge.
Управление шаговыми двигателями
Драйвер шагового двигателя
Эти микросхемы отделяют питание двигателей от питания Arduino. Arduino не может обеспечить достаточное количество энергии для прямого питания шаговых двигателей. Вот почему вы должны использовать отдельные микросхемы, которые действуют как клапаны, управляющие вращением двигателя.
Arduino не может обеспечить достаточное количество энергии для прямого питания шаговых двигателей. Вот почему вы должны использовать отдельные микросхемы, которые действуют как клапаны, управляющие вращением двигателя.
Другим преимуществом чипов шаговых драйверов является то, что они обеспечивают дробных шагов. Это помогает сгладить движение шагового двигателя. Без дробных шагов шаговые двигатели могут иметь тенденцию вибрировать или резонировать при определенных оборотах.
Драйверы шаговых двигателей на базе микроконтроллеров
Драйверы шаговых двигателей на базе микроконтроллеров могут достигать очень высоких скоростей вращения шаговых двигателей. Используя микроконтроллер, можно полностью контролировать то, как именно каждая отдельная катушка подается под напряжение внутри двигателя. Это абсолютно необходимо для получения высоких скоростей, потому что по мере увеличения скорости время срабатывания катушек должно быть идеально синхронизировано. Цитата из доктора Игуаны:
- Если вы когда-нибудь толкали кого-то на качелях, вы знаете, что небольшой, своевременный толчок может заставить этого человека раскачиваться все выше и выше. Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
 Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.Чтобы обрабатывать ток выше, чем может позволить микропроцессор, контроллер должен использовать полный чип H-моста.
Обычно Н-мост используется для управления старым добрым двигателем постоянного тока, но в данном случае чипы Н-моста используются для точного управления количеством электричества, поступающего на каждую отдельную катушку шагового двигателя. Таким образом, для биполярных шаговых двигателей требуется 2 микросхемы на двигатель.
Драйверы шаговых двигателей с открытым исходным кодом
AVRSTMD
AVRSTMD — драйвер шагового двигателя с открытым исходным кодом на базе микроконтроллера. Он использует процессор atmega48 и два чипа h-bridge с ограниченным током National Semiconductor LMD18245T.
Dr. Iguana
Драйвер шагового двигателя Dr. Iguana основан на микроконтроллере dsPic33 и двух чипах L298N H-Bridge. Он может развивать скорость до 800 об/мин. Очень хороший источник информации о шаговых драйверах микроконтроллеров можно найти на его веб-сайте здесь вместе со всеми схемами, файлами gerber, исходным кодом и спецификацией для шагового драйвера.
Доктор Игуана. «Лучший драйвер шагового двигателя своими руками». Серия страниц (и видео), на которых даны советы по проектированию высокоскоростных драйверов шаговых двигателей.
Драйвер шагового двигателя RepRap v1.x
- устарело*
Первое поколение драйверов шаговых двигателей RepRap.
(Примечание: эти платы использовались в коллекции электроники 2-го поколения.) Используется комбинированный драйвер шагового двигателя L297/L298. Полушаг. Выдерживает до 2А. Все сквозное отверстие. Хороший, солидный водитель. Он использует некоторые старые технологии, так что он не такой модный, как более новые драйверы шаговых двигателей, но он выполняет свою работу. Прочтите страницу документации здесь
Прочтите страницу документации здесь
Драйвер шагового двигателя RepRap v2.x
- устарело*
Второе поколение драйверов шаговых двигателей RepRap. (Примечание: эти платы использовались в коллекции электроники 3-го поколения, но их можно было обновить до поколения 2.)
Использует чип Allegro A3982, который делает кучу полезных вещей и делает плату намного проще. Это также снижает цену на 10 долларов по сравнению с серией v1.x. Он может выдерживать до 2А и работает в полушаге. Единственным недостатком является то, что это SMT, что может немного пугать людей. Это все большие детали SMT, поэтому их довольно просто паять, особенно с помощью паяльной пасты/горячей пластины. Прочтите страницу документации здесь.
Трехосевой драйвер шагового двигателя PSMD имеет все те же разъемы и является совместимой по выводам альтернативой драйверу шагового двигателя RepRap v2.x.
Драйверы шаговых двигателей и контроллеры шаговых двигателей
Для работы шагового двигателя обычно требуются две вещи: контроллер для создания сигналов шага и направления (обычно ±5 В) и схема привода, которая может генерировать ток, необходимый для привода двигателя. . В некоторых случаях очень маленький шаговый двигатель может управляться напрямую от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.
. В некоторых случаях очень маленький шаговый двигатель может управляться напрямую от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.
Контроллер шагового двигателя управляет тремя проводами, традиционно помеченными как «шаг», «дир» и «земля», которые передают информацию о движении к драйверу шагового двигателя. (Часто эти 3 линии оптоизолированы на переднем конце драйвера шагового двигателя). Шаговый контроллер обычно представляет собой чисто цифровое логическое устройство и требует относительно небольшой мощности.
Драйвер шагового двигателя подключается к 4 толстым проводам шагового двигателя. Он содержит большие силовые транзисторы и требует толстого силового кабеля для источника питания постоянного тока, потому что вся мощность для привода двигателей проходит через него.
Драйверы ШИМ и шаговых двигателей
Подавляющее большинство драйверов шаговых двигателей подключены к какому-либо контроллеру с 3-проводным интерфейсом: контроллер подает импульс на вывод STEP, чтобы переместить двигатель на один шаг (*), контроллер устанавливает вывод DIR, чтобы выбрать, шаг — это шаг по часовой стрелке или шаг против часовой стрелки и общий контакт GND.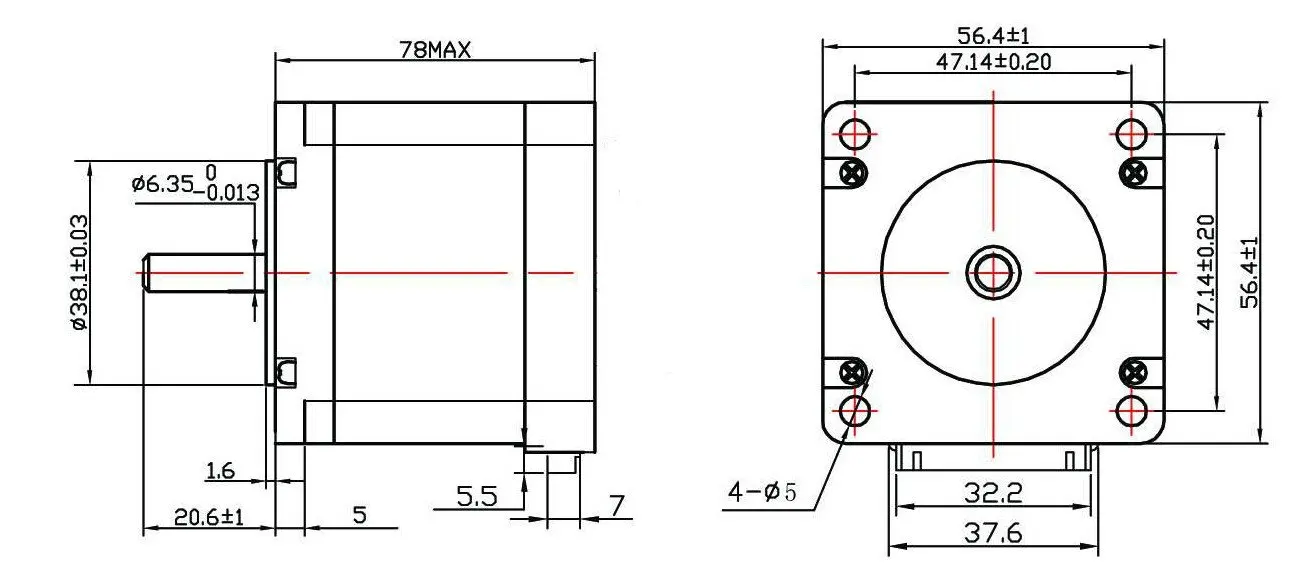
Из Википедии:Широтно-импульсная модуляция: Широтно-импульсная модуляция (ШИМ) — очень эффективный способ обеспечения промежуточного количества электроэнергии между полностью включенным и полностью выключенным. Простой выключатель питания с типичным источником питания обеспечивает полную мощность только при включении. ШИМ — это сравнительно новый метод, который стал практичным благодаря современным электронным переключателям питания.
Драйверы шаговых двигателей обычно работают, уменьшая напряжение питания с помощью встроенной микросхемы ШИМ. Эти чипы требуют незначительной вспомогательной схемы (это основное, за что вы платите, покупая драйвер шагового двигателя). Сами чипы PWM обычно имеют цену за единицу ниже 10 долларов США, в основном в зависимости от их номинального тока.
Драйвер прерывания, также известный как драйвер ограничения тока, поддерживает работу двигателя и ток в двигателе на безопасном уровне, даже при управлении двигателем «3 В» от источника питания «24 В». Все перечисленные здесь микросхемы имеют «тепловое отключение».
Все перечисленные здесь микросхемы имеют «тепловое отключение».
(*) Многие микросхемы также имеют встроенный микрошаг. Когда микрошаговый режим включен, каждый импульс на выводе STEP перемещает двигатель на один микрошаг.
Микросхемы драйвера шагового двигателя
Вот список микросхем драйвера шагового двигателя (самые новые сначала):
| Производитель | Модель | Пиковый ток | Пакет | Дополнительные примечания |
|---|---|---|---|---|
| Тринамик | «Шаговый драйвер и контроллер 5041» | 1,1 А (?) | QFN48 (7×7) | управляет осью Z в T-Bone.[1][2] |
| Тринамик | Контроллер движения TMC4361 + драйвер шагового двигателя Trinamic TMC2660 | 2,6 А (?) | QFP44 | управляет осями X, Y, E в T-Bone.[3][4] |
| Аллегро | А4989 | 10 А | ЦСОП38 | A4989 предназначен для управления N-канальными МОП-транзисторами с внешним питанием.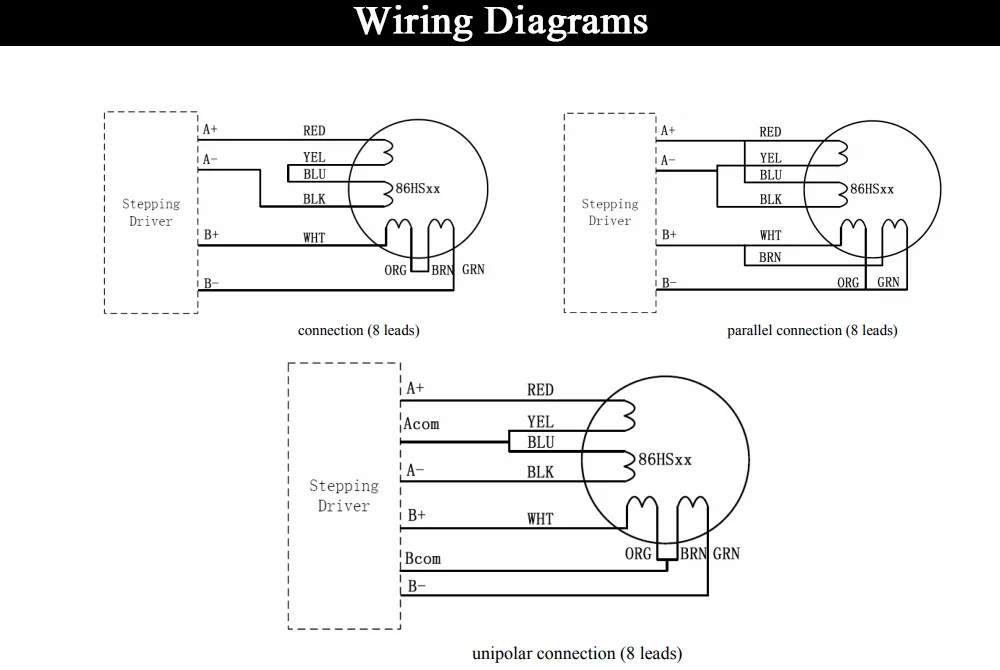 А4989 в Powerlolu (Powerlolu) управляет полевыми МОП-транзисторами IRLR024N, которые позволяют ему управлять 10 А. Вывод, совместимый с A3986. А4989 в Powerlolu (Powerlolu) управляет полевыми МОП-транзисторами IRLR024N, которые позволяют ему управлять 10 А. Вывод, совместимый с A3986. |
| STMicroelectronics | Л6470 | 7 А | HTSSOP28 или POWERSO36 | Дважды использовался в RepRap. Прошивка RepRap на базе Marlin с поддержкой L6470. Репрап печатная плата. Файл:Шаговый двигатель GE версии 0.8b.sch, Файл:Шаговый двигатель GE версии 0.8b.brd, Файл:Reprap.lbr.
Библиотека Arduino L6470 на Github. |
| STMicroelectronics | L9942 | 1,3 А | PowerSSO24 | СПИ. Диагностические флаги для обнаружения опрокидывания, предупреждения о перегреве, отключения при перегреве, открытой нагрузки, перегрузки. Полный, 1/2-, 1/4- и 1/8-шаговый режимы. |
| Тринамик | TMC249A [5][6] | 4 А | SO28 | СПИ. Флаги состояния для обнаружения опрокидывания, перегрузки по току, разомкнутой нагрузки, перегрева, предварительного предупреждения о перегреве, пониженного напряжения. измерение нагрузки. Управляет 8 внешними полевыми МОП-транзисторами — в техническом описании приведен список рекомендуемых силовых транзисторов. Сменная замена для TMC239. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы (1/64-шаг с дополнительными компонентами). измерение нагрузки. Управляет 8 внешними полевыми МОП-транзисторами — в техническом описании приведен список рекомендуемых силовых транзисторов. Сменная замена для TMC239. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы (1/64-шаг с дополнительными компонентами). |
| HHBYtech | THB7128 | 3,3 А | ХЗИП19 | Рекомендуется для электроники Gen7T. По сравнению с TB6560AHQ лучшее расположение контактов (например, все контакты разъема двигателя с одной стороны, как у TB6600HG) и менее требовательный к дизайну окружающей печатной платы. |
| Тошиба | ТБ6560АХК | 3,5 А | ХЗИП25 и ХКФП64 | Используется в электронике Gen7T, Sanguish и Sanguinoshiba, а также в драйвере шагового двигателя с открытым исходным кодом для экологии с открытым исходным кодом [нужна ссылка] . См. также: Контроллер платы драйвера шагового двигателя с ЧПУ 4 Axis TB6560. |
| Тошиба | ТБ6600ХК; ТБ6600ХГ | 4,5 А | ХЗИП25-П-1. 00Ф 00Ф | Используется в драйвере шагового двигателя PiBot TB6600. Протестировано на GEN7V1.4-1.41 и PiBot для Repetier V1.0-1.4. По сравнению с TB6560AHQ лучшее расположение контактов (например, все контакты разъема двигателя с одной стороны, как у THB7128). |
| Аллегро | А3967 | 0,75 А | СОИК | Используется в платах Easy Driver, продаваемых на Sparkfun. Не уверен, что их можно использовать в RepRap, но они хороши для экспериментов. Немного маломощный, всего 750 мА/фаза. |
| Аллегро | А3977 | 2,5 А | ПЛКК или ТССОП | Заброшено в драйвере шагового двигателя версии 2.0. |
| Аллегро | А3979 | 2,5 А | ЦСОП | Заброшен из-за крошечного размера в версии 2.1. |
| Аллегро | А3982 | 2 А | СОИКВ | Улучшено по сравнению с версией 1.2 в версии 2.2. Также используется в драйвере шагового двигателя версии 2.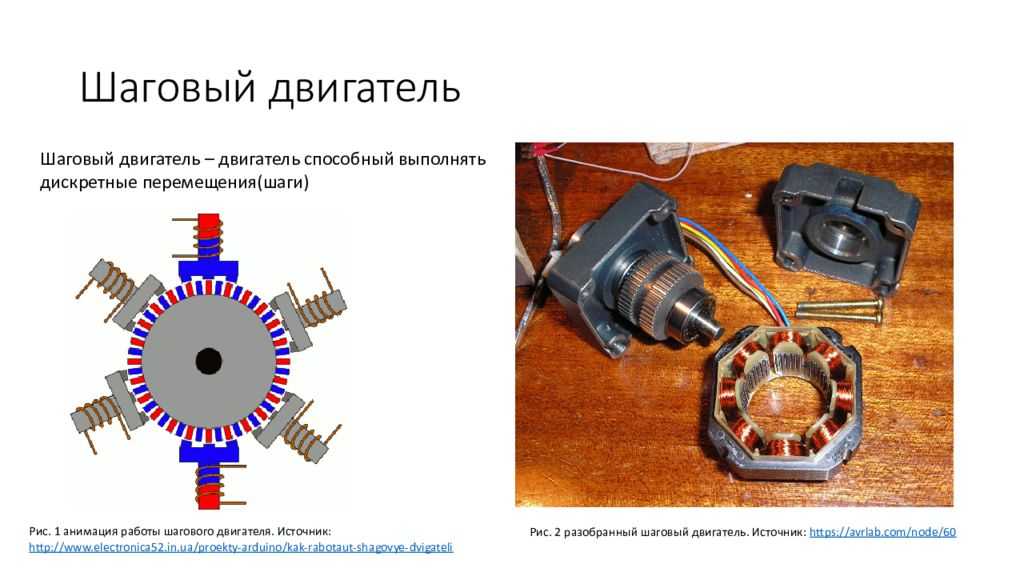 3. 3. |
| Аллегро | А3992 | 1,5 А | DIL или TSSOP | Используется в электронике поколения L. |
| Аллегро | А4984 | 2 А | ТССОП или КФН | Используется в Stepsticka4984. Полный, 1/2-, 1/4- и 1/8-шаговый режимы. защита двигателя от короткого замыкания. Почти идентичен A4988, за исключением того, что в нем отсутствует контакт «M3», который указывает на микрошаг 1/16, и некоторые люди предпочитают этот пакет TSSOP пакету QFN. |
| Аллегро | А4983 | 2 А | КФН | Продукт снят с производства, заменен на A4988. Используется в коммутационной плате A4983. |
| Аллегро | А4988 | 2 А | КФН | Используется в платах драйверов шаговых двигателей Pololu и драйвере G3D. Идентичен и совместим по выводам с A4983, но также имеет подтяжку на M1 и защиту двигателя от короткого замыкания. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы. |
| Техас Инструментс | ДРВ8811 | 2,5 А | ХТСОП | Используется в электронике 6-го поколения. Вероятно, поэтому прошивка FiveD была изменена. |
| STMicroelectronics | Л297 | DIP20 или SO20 | Преобразует входы «step, dir» в 6-контактные выходы «последовательности фаз», которые подключаются к двойному полному мосту, такому как L298. Полный и полушаговый режимы. Последним драйвером шагового двигателя, который использовал это, был драйвер шагового двигателя 1.2. | |
| STMicroelectronics | Л298 | 4 А | Мультиватт15 или PowerSO20 | Двойной полный мост. При правильном подключении к чему-то вроде L6506 или L297, как и в Драйвере шагового двигателя 1.2, L298 может быть использован для построения драйвера прерывающего двигателя (с ограничением по току). Когда его сенсорные выходы напрямую подключены к земле, как в Valkyrie Redux, ограничение тока отсутствует. |
| Техас Инструментс | СН754410 | 1 А | ДИП 16 | Двойной полный мост. «Улучшенная функциональная замена … L293». Без ограничения тока (кроме теплового отключения). |
| STMicroelectronics | Л293Д | 0,6 А | Powerdip 16 или SO20 | Двойной полный мост. Множественные могут быть сложены друг на друга, чтобы разделить силу тока. Без ограничения тока. |
| Техас Инструментс | ДРВ8825 | 2,5 А | 28HTSSOP | ДРВ8825; используется в Replicape, некоторых платах AZSMZ Mini и некоторых (всех?) платах Azteeg X5. До 1/32 шага. |
Столбец «Пиковый ток» дико оптимистичен. (Видеть «Миф о водителе» ).
Корпуса для сквозных отверстий считаются наиболее простыми для пайки вручную («HZIP», «DIL», «DIP», «Powerdip» и т. д.).
«SOIC» и «PLCC» — это относительно простые в пайке корпуса для устройств поверхностного монтажа. Корпуса для поверхностного монтажа «TSSOP», «QFP» и «QFN» трудно паять вручную.
Корпуса для поверхностного монтажа «TSSOP», «QFP» и «QFN» трудно паять вручную.
В резервной копии веб-архива есть хорошая сравнительная таблица и обзор микросхем драйверов микрошагов: «Обзор драйверов биполярных микрошагов по состоянию на август 2013 года» (через «Альтернативные драйверы шаговых двигателей?»).
Драйверы шаговых двигателей
Поиск драйверов шаговых двигателей может быть непростым делом. Драйверы шаговых двигателей RepRap V2.3 очень трудно приобрести в предварительно собранном виде. Строители, обладающие небольшими навыками, могут найти детали и собрать контроллеры. Те, у кого нет навыков или материалов для сборки плат, могут купить обычные драйверы шаговых двигателей. В Европе, как правило, более рентабельно получить предварительно собранные платы, чем покупать детали и выполнять сборку своими руками.
| Производитель | Проверено? | Местоположение | Максимальный ток | Микрошаг | Комментарии |
|---|---|---|---|---|---|
Драйвер шагового двигателя 2. 3 (с использованием A3982) 3 (с использованием A3982) | Да | США | 2 А | 1/2 | Внесен в список для сравнения. |
| Ступенька | Да | Открытый исходный код | 2 А | 1/16 | Совместимость по контактами очень похожие характеристики на плату драйвера шагового двигателя Pololu. |
| СайлентСтепСтик | Да | Открытый исходный код | 1,7 А | 1/16 | Драйвер Trinamic TMC2100. Аппаратное обеспечение, совместимое с StepStick и платой драйвера шагового двигателя Pololu. |
| Плата драйвера шагового двигателя Pololu | Да | США | 2 А | 1/16 | Может сильно нагреваться; требуется активное охлаждение вентилятором или пассивный небольшой радиатор свыше ~0,5 А. |
| МКС TB6600 (с использованием TB6600) | Да | Китай | 4,5 А | 1/1,1/2А,1/2В, 1/4,1/8,1/16 | *Это решение, подходящее для вашего фрезерного станка с ЧПУ и 3D-принтера, позволяет легко преобразовать ваш ЧПУ в 3D-принтер.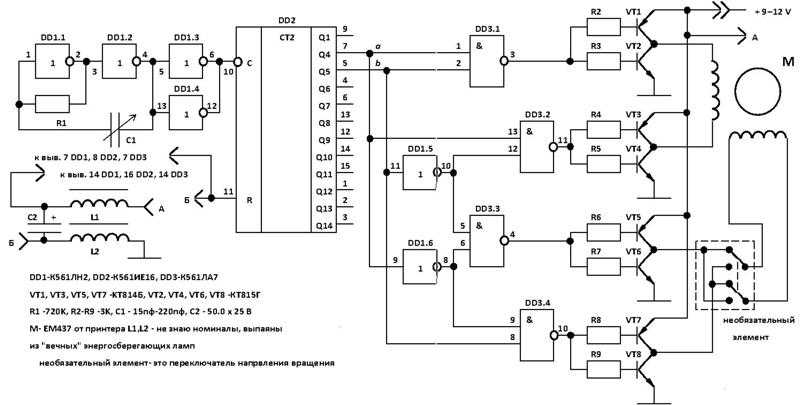 *Предельное входное напряжение: 45 В. *Предельное входное напряжение: 45 В. |
| EasyDriver (с использованием A3967) | Да | США | 0,75 А | 1/8 | Немного слабее по сравнению с другими драйверами, всего 750 мА/фаза. Bothacker использует EasyDriver[7] и сообщает, что его мощности достаточно для Mendel. Рекомендуемые. |
| … ay.com/autohec 4-осевой контроллер драйвера шагового двигателя (с использованием A3977) | Да | США | 2,5 А | 1/8 | 4 шаговых драйвера на одной плате. |
| PiBot_TB6600_Stepper_Driver (с использованием Toshiba 6600HQ) | Да | Китай | 0–4,5 А | 1/1,1/2А,1/2В, 1/4,1/8,1/16 |
|
| DIY ЧПУ | Нет | ГБ | 2,5 А | 1/8 | Может управлять 1 шаговым двигателем; скидка при покупке нескольких. |
| Моторный щит Arduino | Нет | США | 0,6 А | ? | Требуется Arduino в качестве контроллера. Может управлять 2 сервоприводами, 4 двигателями постоянного тока или 2 (биполярными или униполярными) шаговыми двигателями. Веб-сайт отмечает, что вы можете увеличить максимальный ток, вставив (припаяв чип к чипу) еще один L29. 3D-чип поверх первого (и еще один поверх него) 3D-чип поверх первого (и еще один поверх него) |
| … ay.com/?_from=R40&_trksid=p3907.m38.l1313&_nkw=4+axis+TB6560&_sacat=Просмотреть все категории TB6560AHQ на основе | Нет | ГБ/кн. | 1,5–3 А | 1, 1/2, 1/8, 1/16 | Может управлять от 3 до 5 шаговых двигателей в зависимости от модели; читать далее. |
| Клон шагового двигателя 2.3 от kymberlyaandrus | Да | США | 2 А | 1/2 | Та же схема, но физически меньше оригинальной версии. Подстроечный потенциометр не имеет начальной/конечной точки, поэтому регулировка тока может быть более сложной, чем на других досках. Клеммные колодки хороши тем, что не требуют изготовления специальных разъемов. |
| Гекко Драйв | Да | США | 3,5 А | 1/10 (только) | Может управлять 4 шаговыми двигателями |
| Нанотек SMC11 | Да | НЕМЕЦКИЙ | 1,4 А | 1/16 | с охлаждением до 2,5 А |
| LiniStepper от Романа Блэка | нет | США | 3 А | 1/18 и «бесступенчатый» | Открытый исходный код: принципиальная схема, компоновка печатной платы (платы) и программное обеспечение PIC доступны.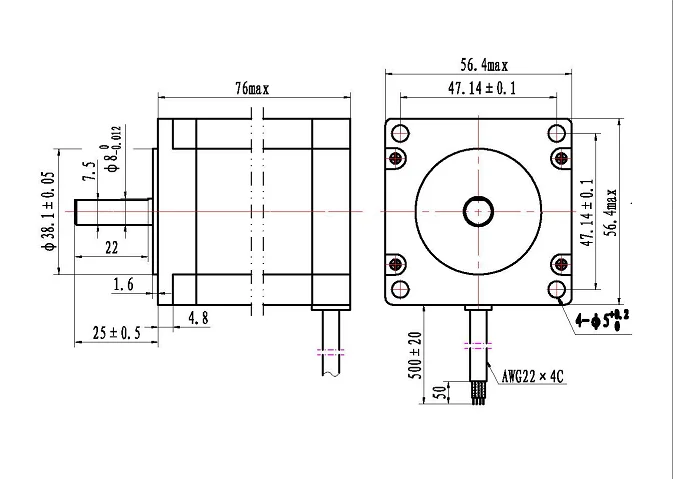 |
| Шаговый двигатель Tri Duino | ??? | ??? | ??? | ??? | Открытый исходный код |
| A3979прорыв | ??? | ??? | ??? | ??? | ??? |
| грблшилд | Нет | США | 2,5 | 1/8 | 3-осевой контроллер подключается к Arduino Uno или аналогичному |
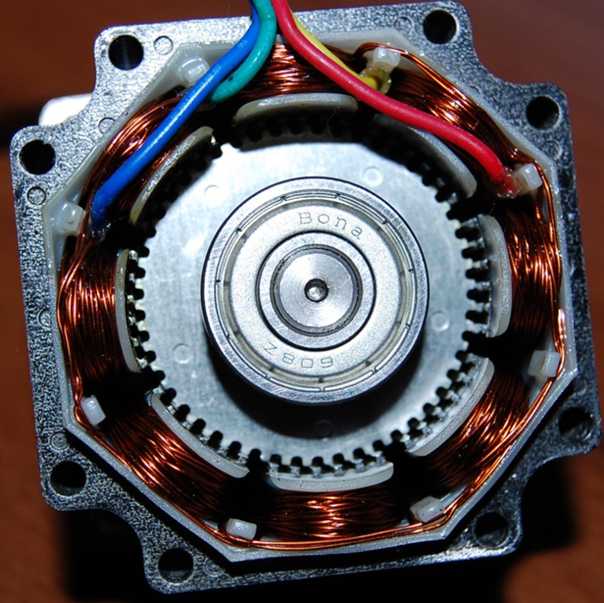
Сравнение драйверов шаговых двигателей PMinMo.
Компенсация среднеполосного резонанса
Драйверы Gecko имеют функцию, называемую компенсацией среднеполосного резонанса, которая предотвращает остановку шаговых двигателей из-за проблем с резонансом, которые могут возникнуть, когда двигатель вращается в диапазоне 5-15 об/мин. Это может быть очень полезно, например, при управлении шаговыми двигателями на мельнице Tiag. Однако шаговые двигатели в Mendel никогда не работают вблизи этого диапазона, поэтому компенсация резонанса средней полосы не дает никакой пользы для сборки Mendel.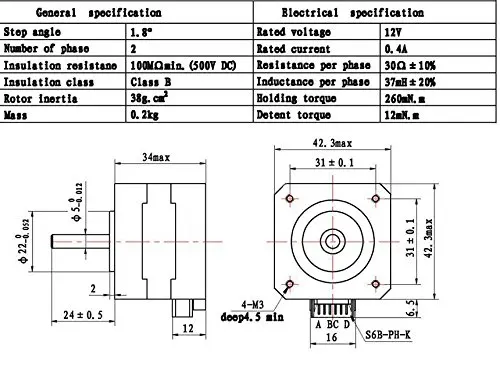
Модули Pololu
- Шаговый двигатель «дрожит»
- Модули Pololu отключаются, когда они слишком горячие. Обеспечить надлежащее охлаждение.
- Шаговый двигатель потребляет слишком много ампер
- Модули Pololu имеют небольшой потенциометр SMD для регулировки тока. Подключайте шаговый двигатель по одному и регулируйте силу тока, пока не будете удовлетворены настройкой.
- Отрегулируйте так, чтобы шаговые двигатели могли удерживать крутящий момент, но не перегревались. Лично я приближаюсь к силе тока, указанной на катушку.
защита
Транзисторы, которые чаще всего выходят из строя в RepRap, — это транзисторы, напрямую подключенные к двигателю. Кажется, в ответ есть три точки зрения:
- позволяют легко заменить эти транзисторы, когда они неизбежно выходят из строя, или
- каким-то образом защищает эти транзисторы, так что они вряд ли выйдут из строя даже в условиях обычной неисправности — Protected Mosfet или .
- оба.

Современные драйверы шаговых двигателей имеют «тепловое отключение» — когда они чувствуют, что им становится слишком жарко, они автоматически все выключают и дают всему остыть. Это может испортить вашу пластиковую печать, но, по крайней мере, не было нанесено необратимого ущерба. (Это не означает, что современные драйверы шаговых двигателей не могут быть окончательно уничтожены; вы просто будете умнее в том, как вы это делаете).
В частности, я слышал, что драйверы двигателя часто выходят из строя, когда двигатель отключается при включенном питании. ( Устранение неполадок # Проблемы с электричеством, Обсуждение: Монотроника, RepRapPro Настройка токов двигателя, RAMPS 1.4 # Предполетная проверка, и т. д.) Что такое режим отказа? Есть ли способ спроектировать драйвер двигателя, чтобы он был невосприимчив к таким отказам? Предпочтительно, чтобы это стоило меньше, чем просто покупка нового «носителя драйвера шагового двигателя» за 11 долларов каждый раз, когда я его выдуваю?
- Шаговый двигатель
- Контур управления двигателем
- У альтернативной электроники есть некоторые соображения по дизайну для людей, проектирующих контроллеры шаговых двигателей и другую электронику.
