Двигатели с резонансной трубой
Харьковский спортсмен чемпион Советского Союза Е. Вербицкий имеет немалый опыт работы с микролитражными двигателями. Мы публикуем статью Вербицкого, а которой подводится итоги его экспериментов. Думается, что статья представит интерес для наших читателей авиамоделистов.
В последнее время многие авиамоделисты используют на микродвигателях эффект таи называемого настроенного выхлопа, другими словами, применяют резонансные выхлопные трубы. Иногда эти трубы именуют глушителями. Действительно, они уменьшают уровень шума работающего двигателя, но основное их назначение — повысить мощность. При правильном подборе резонансной выхлопной трубы и соответствующей переделки двигателя можно получить довольно ощутимый прирост мощности.
По некоторым данным настроенный выхлоп способствует повышению мощности на 20—25 процентов. Поскольку замер мощности — довольно непростой процесс, требующий специального оборудования, косвенно о мощности можно судить по оборотам коленчатого вала на одном и том же воздушном винте.
Установка резонансной выхлопной грубы на двигатель «Супер-тигре G20/15» дала следующие результаты: на рабочем воздушном винте летающей модели серийный двигатель развивал 20 тысяч оборотов в минуту, после применения настроенного выхлопа — 21500—22500 об мим.
Получить что-либо подобное другими усовершенствованиями и модернизацией очень трудно. Предлагается следующий способ переделки отечественных двигателей «Метеор», «ЦСКАМ» и импортного «Супер-тигре G20/15». все размеры на чертежах соответствуют «Супер-тигре», для остальных возможны некоторые незначительные отклонения.
Пожалуй, самое сложное — это изготовить новый поршень. Для двигателей с настроенным выхлопом при положении поршня в верхней мертвой точке важно, чтобы полость картера не соединялась с атмосферой через выхлопное окно гильзы цилиндра, то есть не должно происходить декомпрессии картера. в серийных двигателях по другим соображениям подобное условие не выполняется, поэтому юбку нового поршня надо сделать длиннее (рис.
Чертежи резонансной трубы. Фото кликабельно
О материале. В первом приближении можно взять любой серый чугун. Крайне необходимо обеспечить перпендикулярность осей поршня и поршневого пальца. Желательно, для двигателей с выхлопом назад («МВВСы) обязательно поршневой палец фиксировать стопорными кольцами, которые изготовляются из стальной проволоки диаметром 0,25—0,3 мм.
Для получения желаемого эффекта настроенного выхлопа мы изменим диаграмму газораспределения двигателя. Фазу всасывания, которая а рассматриваемых двигателях не зависит от положения поршня и определяется всасывающим отверстием в коленчатом валу, оставить прежней. Фазу выхлопа увеличим, перепад в фазах выхлопа и перепуска доведем до 20—30 градусов, для чего верхнюю кромку выхлопного окна гильзы распилим на 1 — 1,4 мм. Перепускное окно гильзы не нужно изменять.
На серийных двигателях фаза перепуска колеблется в пределах 140. В нашем случае она порядка 130 градусов. Для уменьшения фазы сделаем новый шатун с межосевым расстоянием 26 мм (в серийном варианте это расстояние равно 25,5 мм). При изготовлении шатуна (материал—прокатный Д16Т) важно выдержать параллельность осей пальца кривошипа и пальца поршня.
В нашем случае она порядка 130 градусов. Для уменьшения фазы сделаем новый шатун с межосевым расстоянием 26 мм (в серийном варианте это расстояние равно 25,5 мм). При изготовлении шатуна (материал—прокатный Д16Т) важно выдержать параллельность осей пальца кривошипа и пальца поршня.
Остальные размеры оставим такими же, как на серийном образце.
Мощность двигателя в некоторой степени зависит от геометрической формы внутренней части головки цилиндра. Существуют различные конфигурации головок. Предложенная на рис. 2 ныне применяется многими спортсменами. Обратите внимание на небольшую конусность торцевой внутренней части (3 ), необходимую для предотвращения гидравлического удара при положении поршня в верхней мертвой точке.
Особенно большое значение для нормальной работы двигателя имеет правильно подобранная степень сжатия, которая определяется объёмом камеры сгорания. Объём лучше всего замерять медицинским шприцем. В двигателях без резонансной трубы этот объем равен 0,3 см3, в нашем случае мы ее увеличим до 0,34- 0,36 см3 то есть несколько уменьшим степень сжатия.
Противовес коленчатого вала обрабатывается (рис. 3) так, чтобы вырез на юбке поршня был как можно меньше. Без такого выреза обойтись нельзя. В нижней мертвой точке поршень не должен касаться коленчатого вала. Слишком большой вырез может привести к декомпрессии картера при положении поршня в верхней мертвой точке.
Новая задняя крышка картера изготавливается по рис. 4.
Резонансная труба устанавливается на двигателе посредством переходника (рис. 5), который через уплотнительную прокладку из паранита прикрепляется к выхлопному патрубку. Установить переходник можно по-разному. На картере двигателя «Супер-тигре», например, предусмотрены две проушины. Главным условием здесь является герметичность системы: резонансная труба — переходник — картер двигателя. Важно, чтобы стыковка резонансной трубы и переходника ни в коем случае не была жесткой. Лучше всего применить селиконовую (жаростойкую) резину (рис.
Резонансную трубу (рис. 7) можно сделать на токарном станке из магниевого сплава МА-8 или дюраля Д16Т. Она состоит из двух частей: переднего и заднего конусов, соединенных клеем БФ-2 или эпоксидной смолой ЭД-5, или ЭД-6.
Некоторые спортсмены успешно применяют точечную сварку для изготовления труб из листового титана или тонкой нержавеющей стали.
Резонансную трубу на токарном станке изготовляют а такой последовательности:
- Заготовку диаметром 294-30 мм и длиной 183 мм установить в патроне токарного станка и расточить внутреннюю цилиндрическую поверхность входной части переднего конуса.
- Не снимав детали, подпереть консольную часть вращающимся центром задней бабки станка. Выточить наружную цилиндрическую поверхность входной части трубы (рис. 8).
- Изготовить упорную пяту под вращающийся центр (рис. 9)
- Деталь установить в патроне станка, как показано на рис. 10. Расточить внутреннюю часть конуса.

- Установить деталь (рис. 11), подпереть вращающимся центром (через упорную пяту) и выточить наружную поверхность конуса. Деталь готова.

Аналогичным образом делается и задний конус резонансной трубы, правда, упорная пята здесь несколько другая (рис. 12).
Заключительная операция — склеить оба конуса между собой.
Предложенная выхлопная труба, применительно к указанным мною двигателям, рассчитана на обороты 21 500—22 500 об/мин. Тщательно надо подбирать винт. На слишком большом винте (аэродинамически тяжелом) двигатель не сможет выйти на обороты, близкие к резонансным, и труба, как говорят, не «включится». На аэродинамически легком винте труба не позволит выйти на обороты выше резонансных. Двигатель будет не догружен, и коэффициент полезного действия такой системы ниже оптимального.
Как подбирать винт? На двигатель с трубой, топливная система которого уже отлажена на винте первого приближения, изготовим заранее несколько больший винт, чтобы труба на нем в полете не «включалась». Постепенно облегчим его (уменьшением диаметра и ширины лопасти) до появления резонансного режима. Такой винт можно считать правильно подобранным, разумеется, при полном соответствии всем другим расчетным данным.
Постепенно облегчим его (уменьшением диаметра и ширины лопасти) до появления резонансного режима. Такой винт можно считать правильно подобранным, разумеется, при полном соответствии всем другим расчетным данным.
Инженер Е. ВЕРБИЦКИЙ. Харьков.
Чемпион Советского Союза. Мастер спорта международного класса
Как работает резонансная труба
Резонансные трубы для кордового пилотажа
Двигатель для скоростной модели
Пилотажные двигатели с дудками (трубами)
| ||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||
 Рассказ и демонстрация работы опытных образцов двигателей Пушкина.
Рассказ и демонстрация работы опытных образцов двигателей Пушкина. Где публикации в научных изданиях с заметной репутаций? Где хоть одна профессиональная рецензия? За столько лет и ни одной? И не будет.»
Где публикации в научных изданиях с заметной репутаций? Где хоть одна профессиональная рецензия? За столько лет и ни одной? И не будет.» Предположу, что феномен есть. Точно так же, как сейчас уже умеют удерживать, например, термоядерную плазму, на какое-то мгновение, но что-то давно я не слышал уже об успехах термоядерного синтеза))
Предположу, что феномен есть. Точно так же, как сейчас уже умеют удерживать, например, термоядерную плазму, на какое-то мгновение, но что-то давно я не слышал уже об успехах термоядерного синтеза))
 В смысле здесь — это необходимо, а вообще в любом другом месте\теме — уже и достаточно.
В смысле здесь — это необходимо, а вообще в любом другом месте\теме — уже и достаточно.
 долларов,» — типа того :-)). Если бы у нас были бы какие-то соревнования любителей, то жулики отсеивались бы… («ихние» в таких случаях денег или иной гос.поддержки не клянчат — при том, что даже призы Ансари не окупают расходов).
долларов,» — типа того :-)). Если бы у нас были бы какие-то соревнования любителей, то жулики отсеивались бы… («ихние» в таких случаях денег или иной гос.поддержки не клянчат — при том, что даже призы Ансари не окупают расходов).
 Кроме того, из него следует, что КПД может составлять 100 % только в том случае, если температура холодильника равна абсолютному нулю»
Кроме того, из него следует, что КПД может составлять 100 % только в том случае, если температура холодильника равна абсолютному нулю»
 .. впрочем, большинство (?-если не все) PDE имеют прямую камеру:
.. впрочем, большинство (?-если не все) PDE имеют прямую камеру: Буду рад, если Вы тоже посмотрите этот
Буду рад, если Вы тоже посмотрите этотAB-020: Описание характеристик линейно-резонансного привода
Главная » Технические ресурсы » AB-020: Описание характеристик линейно-резонансного привода
Понимание характеристик линейных резонансных приводов
Введение
Линейные резонансные приводы (LRA) становятся все более популярными для тактильных приложений. Они являются альтернативой эксцентричным вибрационным двигателям с вращающейся массой и имеют несколько явных преимуществ. Например, они имеют лучшие тактильные характеристики и более эффективны (при резонансе — подробнее об этом ниже). По этим причинам они используются во многих карманных устройствах и устройствах с сенсорным экраном, а также в других приложениях.
По этим причинам они используются во многих карманных устройствах и устройствах с сенсорным экраном, а также в других приложениях.
К сожалению, по этим устройствам мало информации по теории или применению. В этом Бюллетене по применению описывается работа LRA, подробно описывается, как он создает вибрации, моделируется его как механическая система и приводится эквивалентная схема.
Мы также рассмотрим некоторые расширенные функции, которые используют драйверы LRA, и объясним, как они могут их реализовать.
Теория создания вибраций с помощью LRA
Как и в случае с вибрационными двигателями с эксцентриково вращающейся массой (ERM), вибрации, создаваемые LRA, основаны на движении массы, которое вызывает многократное смещение.
Во-первых, чтобы напомнить читателям, ERM имеет нецентральную нагрузку, когда он вращается, центростремительная сила заставляет двигатель двигаться. Вращение создается за счет подачи тока на обмотки якоря, прикрепленные к валу двигателя. Поскольку они находятся внутри магнитного поля, создаваемого постоянными магнитами внутри корпуса двигателя, создается сила, заставляющая вал вращаться. Чтобы вращение продолжалось в том же направлении, ток в обмотках меняется на противоположный. Это достигается за счет использования статических металлических щеток на клеммах двигателя, которые соединяются с коммутатором, который вращается вместе с валом и обмотками. Различные сегменты коммутатора соединяются со щетками во время вращения, и ток меняется на противоположное, сохраняя направление вращения.
Поскольку они находятся внутри магнитного поля, создаваемого постоянными магнитами внутри корпуса двигателя, создается сила, заставляющая вал вращаться. Чтобы вращение продолжалось в том же направлении, ток в обмотках меняется на противоположный. Это достигается за счет использования статических металлических щеток на клеммах двигателя, которые соединяются с коммутатором, который вращается вместе с валом и обмотками. Различные сегменты коммутатора соединяются со щетками во время вращения, и ток меняется на противоположное, сохраняя направление вращения.
Свяжитесь с нами
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Аналогичным образом LRA используют магнитные поля и электрические токи для создания силы. Одним из основных отличий является то, что звуковая катушка (эквивалент обмоток якоря) остается неподвижной, а вместо этого движется магнитная масса. Масса также прикреплена к пружине, которая помогает ей вернуться в центр. Движение магнитной массы вверх и вниз вызывает смещение LRA и, следовательно, силу вибрации.
Масса также прикреплена к пружине, которая помогает ей вернуться в центр. Движение магнитной массы вверх и вниз вызывает смещение LRA и, следовательно, силу вибрации.
Поскольку звуковая катушка остается неподвижной и направление силы на магните должно быть изменено, направление тока в звуковой катушке также должно быть изменено. Это означает, что для правильной работы LRA требуется сигнал привода переменного тока.
LRA работает аналогично тому, как громкоговоритель создает музыку. В громкоговорителе конус динамика используется для создания звуковых волн за счет смещения. Однако громкоговоритель предназначен для работы в диапазоне частот, тогда как LRA настроен на свою резонансную частоту, как мы увидим позже.
Моделирование в виде механической системы
Если вы читали наш предыдущий Бюллетень по применению 004: Понимание характеристик вибрационного двигателя ERM , то вы знакомы с моделью с одной степенью свободы. Напомним, что при анализе поведения эксцентрикового вибрационного двигателя с вращающейся массой мы аппроксимировали систему для создания колебаний только по одной оси, то есть с одной степенью свободы. Одна модель DOF на самом деле представлена массой, которая соединена с пружиной, которая движется вверх и вниз, звучит знакомо? Так и должно быть, это точно описывает LRA!
Напомним, что при анализе поведения эксцентрикового вибрационного двигателя с вращающейся массой мы аппроксимировали систему для создания колебаний только по одной оси, то есть с одной степенью свободы. Одна модель DOF на самом деле представлена массой, которая соединена с пружиной, которая движется вверх и вниз, звучит знакомо? Так и должно быть, это точно описывает LRA!
Поскольку LRA идеально соответствует модели с одной степенью свободы, мы можем использовать то же уравнение движения из AB-004 для описания системы. Мы учитываем жесткость пружины (k), демпфирование (c) (представляющее потери в системе) и движение магнитной массы (M).
Сила одиночной пружины с жесткостью (k) берется из закона Гука:𝐹=𝑘𝑥
Вязкое демпфирование пропорционально скорости массы (представленной ниже как производная смещения):𝐹=𝑐𝑓𝑟𝑎𝑐𝑡𝑥𝑑𝑑
После второго закона движения Ньютона движение магнитной массы описывается как: 𝐹 = 𝑀𝑓𝑟𝑎𝑐𝑑2𝑥𝑑𝑡2
Три силы выше равны входу: 𝐹0 = 𝐴𝑠𝑖𝑛 (𝑜𝑚𝑒𝑔𝑎𝑡)
Поэтому наше полное уравнение для системы: (𝑀) 𝑓𝑟𝑎𝑐𝑑2𝑥𝑑𝑡2+𝑐𝑓𝑟𝑎𝑐𝑑𝑥𝑑𝑡+𝑘𝑥 = 𝐹0𝑠𝑖𝑛 (𝑜𝑚𝑒𝑔𝑎𝑡)
Эквивалентная электрическая цепь и резонансная частота
Мы показали выше, что механическая система LRA очень похожа на систему громкоговорителя. В результате электрический эквивалент также очень похож на двигатель громкоговорителя или звуковой катушки.
В результате электрический эквивалент также очень похож на двигатель громкоговорителя или звуковой катушки.
LRA можно разделить на две части пассивных компонентов. Во-первых, у нас есть импеданс, создаваемый звуковой катушкой и клеммами. Он состоит из резистора и индуктора, аналогично нашей эквивалентной модели двигателя постоянного тока:
. Звуковая катушка LRA и эквивалентная схема терминалаВо-вторых, конденсатор, резистор и катушка индуктивности подключены параллельно. Вместе они представляют импеданс механической секции LRA, когда магнитная масса движется от тока через звуковую катушку:
Эквивалентная схема LRAВместе полная эквивалентная схема выглядит так:
Эквивалентная схема LRAОбщий импеданс параллельной схемы приведен следующим образом: 𝑓𝑟𝑎𝑐1𝑍𝑡𝑜𝑡 = 𝑓𝑟𝑎𝑐1𝑍𝐶+𝑓𝑟𝑎𝑐1𝑍𝑅2+𝑓𝑟𝑎𝑐1𝑍𝐿2
Где: 𝑍𝐶 = 𝑓𝑟𝑎𝑐1𝑗𝑜𝑚𝑒𝑔𝑎𝐶𝑍𝑅2 = 𝑅𝑍𝐿2 = 𝑗𝑜𝑚𝑒𝑔𝑎𝐿
, в то время как импеданс уменьшается с более высокими частотами (омега). ), импеданс индуктора увеличивается. Это приводит нас к тому, что существует определенная частота, при которой импедансы конденсатора и индуктора уравновешиваются, чтобы полное сопротивление механических секций было максимальным. При максимальном импедансе механической секции падение напряжения больше, и поэтому масса движется с большей силой. Эта конкретная частота известна как резонансная частота.
Это приводит нас к тому, что существует определенная частота, при которой импедансы конденсатора и индуктора уравновешиваются, чтобы полное сопротивление механических секций было максимальным. При максимальном импедансе механической секции падение напряжения больше, и поэтому масса движется с большей силой. Эта конкретная частота известна как резонансная частота.
Резонансная частота
Когда LRA управляются с частотой, отличной от их резонансной частоты, производительность и эффективность резко снижаются. Поскольку конденсатор, резистор и катушка индуктивности являются эквивалентными компонентами, представляющими механические свойства LRA, значения этих компонентов могут меняться со временем или зависеть от характеристик окружающей среды. Например, по мере старения LRA пружина может потерять свою эластичность, или материал, на котором установлен LRA, может повлиять на перемещение корпуса под действием вибрации. Это проявляется в вариациях резонансной частоты, которые мы объясним, как преодолеть с помощью электроники в следующем разделе.
Это приводит к интересной особенности LRA. В случае ERM входное напряжение влияет на скорость двигателя, что, в свою очередь, влияет как на амплитуду, так и на частоту вибрации. Для LRA напряжение и частота разделены. Хотя мы не можем регулировать частоту вибрации, амплитуду вибрации можно изменять, не влияя на частоту вибрации. Это привлекательная функция для тех, кто хочет поддерживать частоту вибрации в определенном диапазоне, но при этом воспроизводить тактильные волны.
LRA как компонент цепи
Когда LRA включаются в цепь, они часто упрощаются за пределы эквивалентной схемы. Одна из причин этого заключается в том, что они обычно управляются специальной микросхемой драйвера LRA, такой как DRV2603. При использовании автономной ИС LRA можно просто подключить к соответствующим контактам. Это позволяет дизайнерам и инженерам сэкономить время и сосредоточиться на других частях системы.
Хотя LRA создает обратную ЭДС, и в других бюллетенях по применению мы предприняли шаги, чтобы уменьшить влияние этого эффекта, многие драйверы LRA фактически используют обратную ЭДС в качестве чувствительного механизма. В разделе «Эквивалентная схема» выше мы обсуждали, как будет смещаться резонансная частота LRA. Некоторые ИС драйвера измеряют противо-ЭДС и используют эту информацию для регулировки частоты сигнала возбуждения, чтобы найти резонанс. Это позволяет продукту работать в более близких пределах и уровнях независимо от условий или возраста.
В разделе «Эквивалентная схема» выше мы обсуждали, как будет смещаться резонансная частота LRA. Некоторые ИС драйвера измеряют противо-ЭДС и используют эту информацию для регулировки частоты сигнала возбуждения, чтобы найти резонанс. Это позволяет продукту работать в более близких пределах и уровнях независимо от условий или возраста.
Стоит отметить, что LRA фактически бесщеточные и не страдают от электромагнитных излучений, возникающих при искрении коллектора в двигателях постоянного тока ERM. Это означает, что, как и бесщеточные двигатели ERM, двигатели LRA обычно подходят для оборудования, сертифицированного ATEX.
Базовое и расширенное управление
Самый простой способ управления LRA — использование настольного генератора сигналов и усилителя. Именно так большинство пользователей проводят первоначальное тестирование при оценке устройств. Однако, поскольку большинство LRA используются в тактильных приложениях, драйверы должны быть портативными или компактными, в отличие от лабораторных генераторов сигналов.
Для создания сигнала переменного тока в цифровой электронике требуется ЦАП или расширенные сигналы ШИМ в сочетании с фильтрами высокого порядка. До того, как LRA стали популярными, наиболее распространенным источником сигналов переменного тока были аудиопроцессоры, используемые для выходов наушников или динамиков. Хотя их можно использовать для управления LRA (при условии, что они обеспечивают достаточный выходной ток), в настоящее время существуют специальные микросхемы для управления LRA. Они будут принимать упрощенные сигналы ШИМ для управления силой вибрации и создавать соответствующий сигнал переменного тока.
Они также обеспечивают более продвинутые тактильные характеристики благодаря множеству функций.
Тактильные характеристики LRA намного лучше, чем у их аналогов ERM, за исключением типичного времени остановки. Наш C10-100 имеет типичное время запуска 5 мс, что с некоторым отрывом ниже, чем у всех двигателей ERM.
Однако пружины очень хорошо накапливают энергию, поэтому магниту требуется много времени, чтобы прийти в состояние покоя. Наше тестирование показало, что типичное время остановки составляет 275 мс (C10-100). Чтобы улучшить «четкий» тактильный эффект, его необходимо уменьшить, что достигается с помощью техники, называемой обратным торможением. ERM делают это, меняя полярность постоянного напряжения. Обратное прерывание с LRA работает аналогичным образом, сдвигая фазу сигнала переменного тока на 180°, что существенно меняет полярность. Это создает электромагнитную силу на массе в направлении, противоположном ее скорости, тем самым останавливая ее быстрее. Практически это достижимо только при использовании специализированных микросхем драйверов LRA.
Наше тестирование показало, что типичное время остановки составляет 275 мс (C10-100). Чтобы улучшить «четкий» тактильный эффект, его необходимо уменьшить, что достигается с помощью техники, называемой обратным торможением. ERM делают это, меняя полярность постоянного напряжения. Обратное прерывание с LRA работает аналогичным образом, сдвигая фазу сигнала переменного тока на 180°, что существенно меняет полярность. Это создает электромагнитную силу на массе в направлении, противоположном ее скорости, тем самым останавливая ее быстрее. Практически это достижимо только при использовании специализированных микросхем драйверов LRA.
Для получения дополнительной информации о драйверах LRA см. Бюллетень по применению 003: Управление линейными резонансными приводами.
Заключение
Мы продемонстрировали, как LRA производят вибрации, объяснив их электрическую и механическую работу. Это включало обзор их внутренней конструкции и сравнение их с аналогом ERM, а также подчеркивание их сходства с громкоговорителем.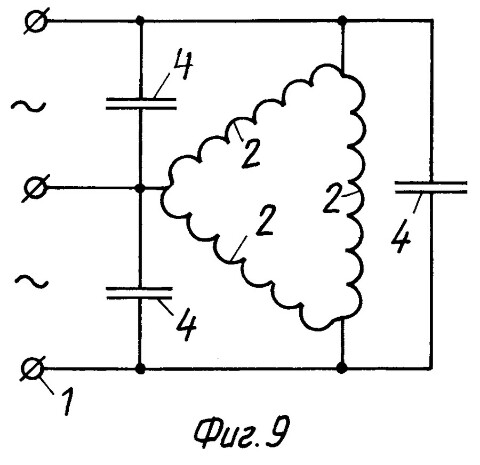
Далее мы описали систему, выведя уравнение движения на основе модели с одной степенью свободы. Также была изготовлена эквивалентная схема, учитывающая как электрические, так и механические части системы и представляющая их как пассивные электрические компоненты.
Из эквивалентной схемы нам удалось объяснить наличие резонансной частоты, это единственная частота, на которой будет вибрировать LRA. Поскольку эта резонансная частота может смещаться в зависимости от множества факторов, это создает проблему для разработчиков.
Проблема резонанса смещения, а также другие сложности вождения могут быть решены с помощью специальной микросхемы драйвера LRA, несколько из которых описаны в нашем AB-003. Другие преимущества использования ИС драйвера были отмечены объяснением работы расширенных функций, таких как активное торможение.
Информационный бюллетень
Подпишитесь на получение новых блогов, тематических исследований и ресурсов прямо на ваш почтовый ящик.

Зарегистрироваться
ИмяПервое Последний
Электронная почта (обязательно)
Согласие с условиями (обязательно)Я прочитал и согласен с Условиями и политикой конфиденциальности Precision Microdrives
Согласие на обсуждение (обязательно)Я рад, что Precision Microdrives получил мои данные, чтобы мы могли обсудить мой запрос
Узнать больше
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и испытанный сложный механизм — мы здесь, чтобы помочь. Узнайте больше о нашей компании.
- Почему PMD
- О нас
- Двигатели
- Механизмы
- Карьера
Линейные резонансные приводы – LRA
В рамках линейки вибрационных двигателей Precision Haptic™ мы предлагаем несколько типов вибрационных двигателей с линейным резонансным приводом (LRA) (также известных как линейные вибраторы). Двигатели LRA отличаются от вибрационных двигателей с эксцентриковыми вращающимися массами (ERM) тем, как они работают, как они используются и как долго они служат.
Если у вас есть приложение, требующее устойчивой вибрации или высокой достоверности рейтинга MTTF, рассмотрите наши вибрационные двигатели с линейным резонансным приводом в качестве альтернативы бесщеточным вибрационным двигателям с длительным сроком службы. Но имейте в виду, что более длительный срок службы и более высокий уровень контроля немного усложняются — продолжайте читать, чтобы узнать больше.
Общая конструкция линейного вибратора LRA с осью Y
На приведенном выше рисунке показано общее расположение деталей внутри вибрационного двигателя LRA с осью Y. Читатели, знакомые с аудиотехникой, заметят, что привод звуковой катушки очень похож на этот громкоговоритель. Однако вместо конуса, генерирующего волны звукового давления, имеется масса, генерирующая колебания.
Ниже приведен еще один LRA, который работает так же, однако колебания направлены только по оси Z. Это предлагает пользователям более широкий выбор дизайна, поскольку они могут создавать вибрации как в горизонтальном, так и в вертикальном направлениях.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Магнитное поле создается звуковой катушкой, которая взаимодействует с массой магнита, подвешенной на пружине. Поскольку магнитное поле изменяется в зависимости от приложенного управляющего сигнала, магнит и масса перемещаются вверх и вниз при взаимодействии с пружиной.
Резонансная частота работы
Опять же, те читатели, которые знакомы с вибрацией, радиочастотой или аудиотехникой, быстро заметят, что прикрепление груза к пружине вызывает эффект резонанса. Сочетание жесткости пружины, массы и размера магнита/катушки приводит к тому, что линейный вибратор имеет собственную резонансную частоту.
На этой собственной резонансной частоте LRA работает наиболее эффективно, как видно из зависимости выходной амплитуды от частоты на графике Боде выше для нашего линейного резонансного актуатора C10-100.
Обычно для вибраторов с осью Y резонансные частоты составляют около 175–235 Гц, см. наш диапазон здесь.
Управление линейными резонансными приводами / линейными вибраторами
Линейные вибраторыLRA должны приводиться в действие сигналом переменного тока, подобно громкоговорителю. Предпочтительно, чтобы этот сигнал был синусоидой на резонансной частоте, как показано ниже.
Форма управляющего сигнала, конечно, может быть модулирована по амплитуде для создания более сложных эффектов тактильной обратной связи.
Прочтите наш бюллетень по применению вибрационных двигателей LRA, чтобы узнать больше.
Увеличенный срок службы линейных вибраторов
В отличие от большинства вибрационных двигателей с электромеханической коммутацией, вибрационные двигатели LRA практически бесщеточные, поскольку для привода массы в них используется звуковая катушка. Это означает, что единственными движущимися частями, которые могут выйти из строя, являются пружины.