2.5.2. Реле направления мощности. Релейная защита в распределительных электрических Б90 сетях
2.5.2. Реле направления мощности
Для того чтобы определить направление мощности, передаваемой по контролируемой электрической сети, в месте установки защиты используют специальное реле — реле направления мощности. Отечественная промышленность выпускает реле направления мощности двух видов: индукционные (серий РБМ-170 и РБМ-270) и микроэлектронные (типа РМ-11 и РМ-12) [3].
Индукционное реле направления мощности [2, 3] имеет две обмотки, размещенные на полюсах замкнутого стального магнитопровода 1 (рис. 2.17). Одна из них, токовая (4) включается во вторичные цепи ТТ, и ток в ней (Ip) определяется вторичным током ТТ. Вторая — потенциальная (5) — подключается ко вторичной обмотке трансформатора напряжения (ТН), и ток в ней (IH) пропорционален подведенному напряжению (UH). Между полюсами расположен внутренний стальной сердечник
Между полюсами расположен внутренний стальной сердечник
Магнитные потоки, создаваемые катушками с соответствующими токами, сдвинуты в пространстве на угол 90°. Взаимодействие потоков с токами, индуктированными ими в роторе, создает вращающий момент, который заставляет ротор поворачиваться. Если магнитные потоки имеют синусоидальную форму, то вращающий момент МВР ~ ФI ? ФU ? sin?. Здесь Ф
На рис. 2.18 показана векторная диаграмма, поясняющая принцип действия реле. Приняты следующие обозначения: ?p и ?H — векторы тока и напряжения, подведенных к реле; ?р — угол между векторами ?p и ?H, определяемый параметрами силовой электрической сети и схемой включения реле;
Учитывая, что ФI ~ Ip, ФU ~ IH~ UH, а ? = ? — ?р, можно получить:
MBP = kp ? UH ? IP ? sin (? — ?р).
В этом выражении kp — постоянный коэффициент, определяемый параметрами реле, а U Следовательно, вращающий момент реле пропорционален мощности: MBP = kp ? Sp, то есть реле реагирует на мощность.
Следовательно, вращающий момент реле пропорционален мощности: MBP = kp ? Sp, то есть реле реагирует на мощность.
Вращающий момент реле равен нулю, когда sin (? — ?р) = 0. Отсюда следует, что MBP = 0, если ?р = ? при отставании и если ?р = (? + 180°) при опережении вектором ?p вектора ?H. Линия, расположенная под этим углом к вектору
Угол ?р между векторами ?P и ?H, при котором вращающий момент имеет максимальное значение, принято называть углом максимальной чувствительности ?МЧ. Линия, расположенная к вектору ?H под углом ?МЧ, называется линией максимального момента.
Если внутренний угол ? = 0 (рис. 2.19, а), то вращающий момент MBP = kp ? UH ? Ip ? sin (??р) в реле пропорционален реактивной мощности, подведенной к реле (синусное реле или реле реактивной мощности).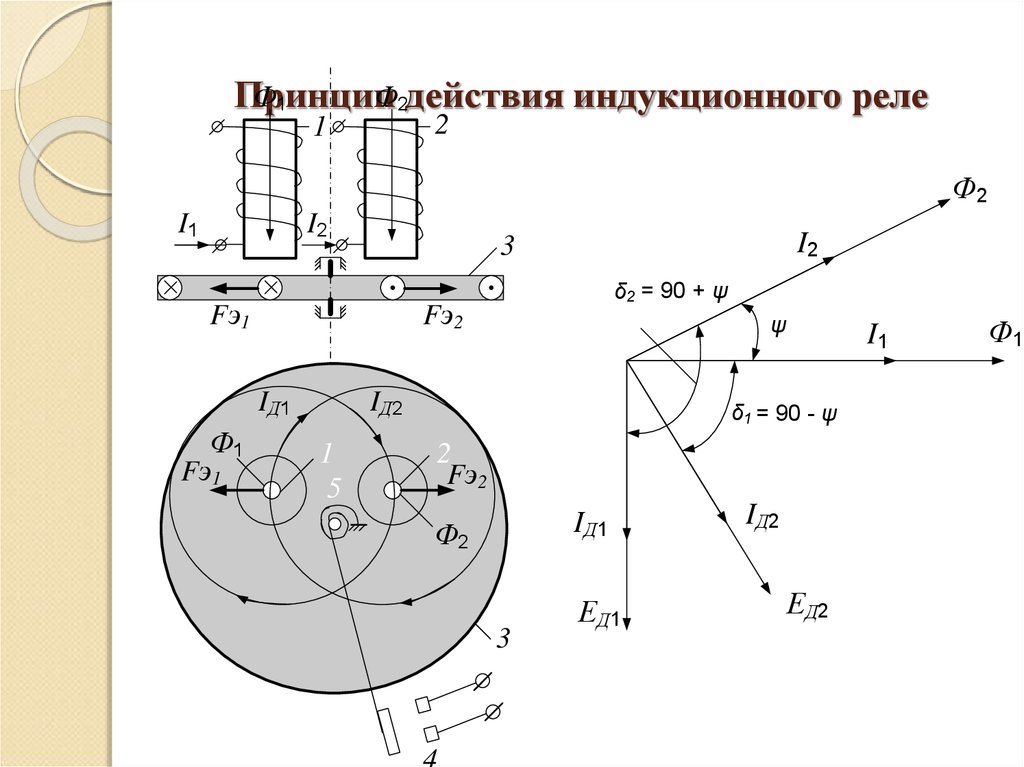
Если внутренний угол ? = 90° (рис. 2.19, б), то вращающий момент
MBP = kp ? UH ? IP ? sin (90 ? ?р) = kp ? UH ? IP ? cos ?р
пропорционален активной мощности, подведенной к реле (
В реле смешанного типа (см. рис. 2.18) угол а может иметь значения от 0° до 90°. У отечественных реле смешанного типа (РБМ-171, РБМ-271) угол а изменяется дискретно: ? = 45° (?МЧ = 45°) или ? = 60° (?мч = 30°).
Срабатывание реле направления мощности происходит при выполнении условия:
MBP ? МПР,
где МПР — противодействующий момент, который определяется силой противодействия возвратной пружины, трением в подшипниках реле и силой нажатия контактов при срабатывании реле.
Поскольку вращающий момент реле пропорционален подведенной к нему мощности, то реле срабатывает при определенном произведении UH ? Ip. Минимальное значение мощности на зажимах реле, при котором оно срабатывает, принято называть мощностью срабатывания реле SCP. Для большинства индукционных реле SCP = (0,2 ? 4) B ? A.
Чувствительность реле оценивается по вольт-амперной характеристике, которая представляет собой зависимость напряжения срабатывания реле от тока (рис. 2.20, а), при неизменном угле между векторами 
Зависимость мощности срабатывания реле от угла между векторами ?H и ?p при неизменном токе принято называть угловой характеристикой реле (рис. 2.20, б) [2]. Она определяет зоны срабатывания и несрабатывания реле. Как видно, при углах, соответствующих изменению направления вращающего момента, мощность срабатывания возрастает и стремится к бесконечности. При ?р
Принцип действия микроэлектронных статических реле направления мощности РМ-11 и РМ-12 основан на измерении длительности интервалов времени, при котором напряжение и ток, подведенные к реле, имеют одинаковый знак. Время совпадения знака сигналов измеряется в течение каждого полупериода и сравнивается с уставкой. При определенной продолжительности времени совпадения знаков сигналов реле срабатывает. Эти реле превосходят индукционные по многим основным характеристикам и широко используются в системах релейной защиты [3].
Реле
Реле Реле – это прибор, который реагирует на дифференциацию каких-либо параметров установки и воздействует на исполнительный аппарат за счет местного источника.Разновидности реле1. Реле автоматики – устройство, которое реагирует на какое-либо определенное значение
Реле
Реле Реле (франц. relais) – вспомогательная часть электромагнитного телеграфного аппарата. Слабый гальванический ток, придя по проводу к станции, действует на Р., который замыкает уже местную гальваническую батарею; ток ее, более сильный, чем ток, пришедший к Р., действует на
Вар (единица мощности)
Вар (единица мощности)
Вар,
вольт-ампер реактивный, единица реактивной мощности переменного тока Q
=UIsinj
, где j
— сдвиг фаз между током I
и напряжением U
в цепи синусоидального переменного тока (см. также Вольт-ампер
). В.
обозначается вар
или var. Различие в размерах В. и
также Вольт-ампер
). В.
обозначается вар
или var. Различие в размерах В. и
6. Пневматические переключатели давления (реле уровня)
2.6.2. Расчет числа витков обмоток реле РНТ-565 и ДЗТ-11
2.6.2. Расчет числа витков обмоток реле РНТ-565 и ДЗТ-11 Определяется ток срабатывания реле для стороны ВН: Рассчитывается и округляется в меньшую сторону число витков уравнительной обмотки на стороне ВН (первой, см. рис. 2.26): где FCP — магнитодвижущая сила, необходимая для
Приложение 6 Параметры реле
Приложение 6
Параметры реле
Таблица П6. 1
Таблица П6.2
Уставка электромагнитного элемента реле может устанавливаться в пределах (2–8) тока срабатывания индукционного элемента реле.Коэффициент возврата всех реле не менее 0,8.Мощность, потребляемая реле при токе уставки,
1
Таблица П6.2
Уставка электромагнитного элемента реле может устанавливаться в пределах (2–8) тока срабатывания индукционного элемента реле.Коэффициент возврата всех реле не менее 0,8.Мощность, потребляемая реле при токе уставки,
16.35. Ремонт скутера. Реле стартера — замена
16.35. Ремонт скутера. Реле стартера — замена СНЯТИЕДля демонтажа реле стартера необходимо сначала снять заднюю часть облицовки скутера (см. Облицовки — снятие и установка).1. Шестигранным ключом отворачиваем болт крепления реле стартера. 2. Снимаем с реле стартера
Реле направления мощности — презентация онлайн
1. Реле направления мощности
Функция РНМРНМ
Sк2
К1
Sк1
К2
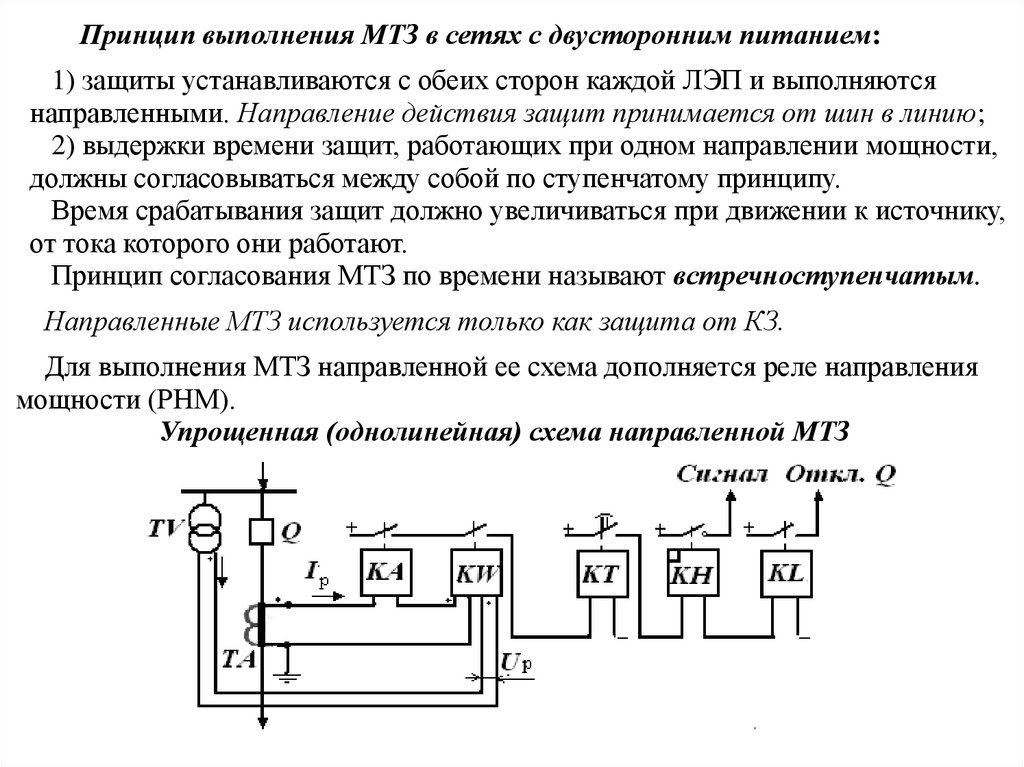
В первом случае Sк1 направлена от шин в линию и РНМ
должно замыкать свои контакты, во втором – Sк 2
направлена к шинам и РНМ не должно замыкать
контакты.

РНМ имеет две обмотки: одна питается напряжением
Uр, а другая током Iр
РНМ
ТН
Iн
ТТ
Ip
Up
Взаимодействие токов, проходящим по обмоткам, создает
электромагнитный момент, величина и знак которого зависят от
напряжения Up, тока Ip и угла сдвига φp между ними.
Чувствительность РНМ оценивается минимальной мощностью,
при которой реле замыкает свои контакты.
Эта мощность называется мощностью срабатывания Sс.р.
4. Принцип действия индукционного реле
Ф1Ф2действия индукционного реле
Принцип
2
1
Ф2
I1
I2
Fэ1
δ2 = 90 + ψ
Fэ2
IД1
Ф1
Fэ1
I2
3
ψ
IД2
1
5
δ1 = 90 — ψ
2
Fэ2
IД1
Ф2
3
ЕД1
IД2
ЕД2
I1
Ф1
Подвижный из алюминия или меди диск 3 находится в поле
двух магнитных потоков Ф1 и Ф2, которые создаются
переменными токами, протекающими по обмоткам
неподвижных электромагнитов 1 и 2. При вращении
против часовой стрелки диск преодолевает момент
пружины 5 и замыкает контакты 4.

Можно считать, что потоки и токи совпадают по фазе.
Пронизывая диск 3 магнитные потоки Ф1 и Ф2 наводят в
диске ЭДС ЕД1 и ЕД2 , которые отстают по фазе от
вызвавших их потоков на 90 градусов согласно закону
электромагнитной индукции. Под действием этих же
потоков в диске создаются вихревые токи IД1 и IД2 ,
замыкающиеся вокруг оси индуктирующего их магнитного
потока и, можно считать, совпадающие с
соответствующими ЭДС по фазе.
Известно, что между магнитным потоком и током,
находящимся в его поле, возникают электромагнитные
силы взаимодействия.
В данном случае это электромагнитные силы
соответственно FЭ1 и FЭ2 . Мгновенное значение этих сил
меняет свой знак в течение периода, а вращение диска
зависит от знака среднего значения сил FЭ1 и FЭ2 . Знак и
направление каждой силы определяется углом сдвига
фаз между магнитным потоком и взаимодействующим с
ним током.
Силы образуют результирующую электромагнитную силу,
равную их алгебраической сумме FЭ = FЭ1 + FЭ2 .

Результирующая сила создает вращающий момент
МЭ = FЭ d, где d – плечо силы FЭ . МЭ и FЭ приводят диск 3 в
движение, который в зависимости от знак МЭ замыкает
или размыкает контакты 4.
Таким образом, принцип работы индукционного реле
основан на взаимодействии двух мгновенных потоков с
вихревыми токами, индуктируемыми в подвижной
системе реле (диске).
Реле имеет наибольший момент при сдвиге фаз магнитных
потоков на 90 градусов (ψ = 90°). При ψ = 0 реле не
может работать, т.к. МЭ = 0. Знак момента зависит
от sinψ , т.е. от сдвига фаз между магнитными
потоками Ф1 и Ф2 или создающими их токами I1 и I2 .
При значениях ψ в пределах 0-180° момент МЭ
положителен, а при ψ в пределах 180-360 ° он
отрицателен. Соответственно и электромагнитная сила
изменяет свое направление, а диск вращается в
соответствии с ее направлением. FЭ всегда направлена от
оси опережающего магнитного потока к оси отстающего
магнитного потока.
8.
 Время действия индукционных релеПринцип действия индукционных реле позволяет выполнить их с
Время действия индукционных релеПринцип действия индукционных реле позволяет выполнить их свыдержкой времени без применения специальных часовых
механизмов.
Время действия реле зависит от угла α, на который должен повернуться
диск для замыкания контактов реле и угловой скорости движения
диска ωр. При постоянной скорости tp = α /ωр.
Движение диска происходит под влиянием избыточного момента
Мвр = МЭ – Мс, представляющего собой разность электромагнитного
момента и противодействующего ему момента сопротивления. Мвр
преодолевает момент инерции подвижной системы Jdω/dt, сообщая ей
ускорение dω/dt, т.е.
Мвр = Jdω/dt. Чем больше избыточный момент Мвр, тем больше скорость
вращения диска ωр. С увеличением тока Iр в обмотке реле избыточный
момент возрастает за счет увеличения электромагнитного момента,
который пропорционален Iр2. В результате этого возрастает скорость
ωр и соответственно уменьшается время действия реле tp.
Таким образом время действия индукционного реле обратно
пропорционально увеличению тока.
 Такая характеристика времени
Такая характеристика временидействия реле называется зависимой (кривая 1).
t
Зависимая часть
Независимая часть
2
1
t = const
Ip
Iс.p
На практике применяются токовые реле с ограниченно зависимой
характеристикой ВВ (кривая 2). Ее особенность в том, что начиная с
некоторого значения тока время действия реле не зависит от тока, т.е.
остается постоянным.
Характеристика 2 обеспечивается за счет насыщения магнитопровода.
При этом увеличение тока Iр не вызывает увеличения магнитных
потоков Ф1 и Ф2, в результате чего избыточный момент и обуславленные
им скорость вращения диска и ВВ остаются неизменными.
Для повышения ВВ устанавливается постоянный магнит, охватывающий
своими полюсами диск. При вращении диск пересекает силовые линии
магнитного потока постоянного магнита, в результате чего в нем
наводятся токи «резания». От их взаимодействия возникает
противодействующий момент, который уменьшает скорость ωр и
соответственно увеличивает tр.
ВВ регулируется изменением расстояния между подвижным и
неподвижным контактами.
Для увеличения скорости вращения применяется вместо диска цилиндр,
что увеличивает ВВ с 0,1с до 0,02 -0,01с.
11. Инерционный выбег
Вращающийся диск после прекращения действияэлектромагнитной силы продолжает свое движение по
инерции за счет накопленной кинетической энергии, что
может привести к замыканию контактов после отключения
КЗ в сети. Постоянный магнит снижает, но не исключает
полностью инерционный выбег реле. Поэтому ступень
селективности защиты при выборе ВВ увеличивается на
время инерционной ошибки.
12. Векторная диаграмма РНМ
Upα
А
φМ.ч
С
φр
Линия максимального
момента МЭ
МЭ
MЭ = Ip sin(a — jР)
В
ψ
Iн(Фн)
90°
Линия изменения знака
момента МЭ
D
Исходным для ее построения принимается вектор напряжения
Up. Ток Iн сдвинут по фазе относительно напряжения Up на угол
α, а ток Iр – на угол φp.

Угол α определяется индуктивным и активным
сопротивлением обмотки напряжения и называется углом
внутреннего сдвига реле. Магнитные потоки Фн и ФТ
совпадают с создающими их токами Iн и Iр . Из векторной
диаграммы следует, что поток Фн и Фт, а также и токи Iн и Iр
сдвинуты по фазе на угол
Ψ = α – φр и что угол Ψ меняется с изменением φр.
Имея ввиду, что Фн ≡ Iн ≡ Uн , ФТ ≡ Iр , а Ψ = α – φр , имеем
МЭ = k1Uр Iр sin(α – φр ) = k1Sp ,
где Sp = Uр Iр sin(α – φр ) – мощность, подведенная к реле.
Знак МЭ определяется знаком sin(α – φр ) и зависит от значения
φр. Синус, а следовательно, и МЭ положительны, когда угол Ψ ≠
α – φр находится в пределах 0 – 180°, и отрицательны, если Ψ
меняется от 180 до 360°.
На диаграмме зона отрицательных моментов заштрихована.
За положительное направление момента МЭ принято его
действие против часовой стрелки – на замыкание контакта.
Незащтрихованная часть диаграммы соответствует области
положительных моментов, где ФТ опережает Фн а Ψ и его синус
имеют положительный знак.
 Линия АВ называется линией
Линия АВ называется линиейизменения знаков момента и всегда расположена под углом α
к вектору Uр , т.е. совпадает с вектором Iн .
При ФТ , опережающем поток Фн, момент МЭ
положителен, а при отстающем – отрицателен.
Линия СD называется линией максимальных
моментов МЭ.
Угол φр , при котором МЭ достигает максимального
значения называется углом максимальной
чувствительности φм.ч.
РНМ не действует, если отсутствуют напряжение
или ток в реле или если sin(α – φр ) = 0, что имеет
место при φр = α и φр = α + 180°.
16. Три типа реле направления мощности
Изменяя величину угла внутреннего сдвига реле ɑ, можнополучить три типа РНМ различающихся характером
зависимости МЭ от Фр.
1. При ɑ = 0
МЭ = k1Uр Iр sinφр ,
т.е. МЭ пропорционален реактивной мощности,
измеренной на зажимах реле.
Такие реле называются синусными или реле
направления реактивной мощности.
Реле имеет максимальный вращающий момент
при φр = 90°;
при φр = 0 момент МЭ равен нулю.

Зоны положительных и отрицательных вращающих
моментов и линия изменения знака моментов реле
(АВ) приведены на рис.
2. При α = 90°
МЭ = kUр Iр sin(90° — φр) = kUр Iр cosφр ,
т.е. момент реле пропорционален активной
мощности, подводимой к реле.
Такие реле называются
реле активной мощности или косинусными.
18. Векторные диаграммы РНМ синусного а) и косинусного б) типов
СА
Iр(φТ)
Up
φр
Iн(Фн)
α = 90o
α=0
φр
ψ
MЭ ≡ Ip cosjР
+MЭ
С
MЭ ≡ Ip sinjР
Iр(φТ)
Up
ψ
Iн(Фн)
А
— MЭ
D
В
В
D
а)
б)
3. При промежуточном значении угла 0 < α1 < 90°
МЭ = k1Uр Iр sin(α1 – φр).
Такое реле, реагирующее на некоторую долю
активной и реактивной мощности, называется реле
мощности смешанного типа.
20. Основные характеристики РНМ
Мощность срабатывания Sср –наименьшая мощность на зажимах реле,
при которой оно срабатывает.
Up
Срабатывание реле происходит при
условии, что МЭ преодолеет
сопротивление пружины Мп и трения МТ.
У современных РНМ при угле
максимальной чувствительности, когда
sin(α – φр) = 1, Sср = (0,2 – 4) ВА.
Характеристика чувствительности зависимость Uср = f(Ip) при неизменном
φр , где Uср – наименьшее напряжение,
необходимое для действия реле (при
данных значениях Ip и φр).
Характеристика снимается при φр, равном
углу максимальной чувствительности.
В реальности за счет насыщения стали
магнитопровода при больших токах Ip
напряжение Uср = const.
2
1
Ucp.min
Ip
1-теоритическая;
2-действительная
Угловая характеристика представляет собой зависимость Uср = f(φр)
при неизменном Ip . Она может быть получена из выражения
МЭ = k1Uр Iр sin(α – φр ) = k1Sp
при фиксированных значениях Ip и α.
100
Up
80
60
40
20
φp
0
Рабочая
зона
45
90
135
Нерабочая
зона
180
225
270
315 360°
Рабочая
зона
Угловая характеристика РНМ смешанного типа при α = 45°
22.
 Угловая характеристика позволяет определить:а) изменение чувствительности реле (характеризуемое величиной Uср)
Угловая характеристика позволяет определить:а) изменение чувствительности реле (характеризуемое величиной Uср)при разных углах φр;
б) минимальную величину Uср.мин и наиболее выгодную зону углов φр , в
пределах которой Uср близко Uср.мин ;
в) при каких углах φр меняется знак электромагнитного момента и
пределы углов φр , которым соответствуют положительные и
отрицательные моменты.
Время действия РНМ зависит от величины мощности на зажимах
реле, характеризуемой отношением Sp/Scp.
t
При мощности Sp, близких к Scp, ВВ достаточно велики
и только при Sp/Scp > 3-4 реле работает с минимальным
временем.
Sp /Scp
0
1
2
3
4
5
Реле направления мощности презентация, доклад
Реле направления мощности
В первом случае Sк1 направлена от шин в линию и РНМ должно замыкать свои контакты, во втором – Sк 2 направлена к шинам и РНМ не должно замыкать контакты.
РНМ имеет две обмотки: одна питается напряжением Uр, а другая током Iр
Функция РНМ
Взаимодействие токов, проходящим по обмоткам, создает
электромагнитный момент, величина и знак которого зависят от напряжения Up, тока Ip и угла сдвига φp между ними. Чувствительность РНМ оценивается минимальной мощностью, при которой реле замыкает свои контакты.
Эта мощность называется мощностью срабатывания Sс.р.
Принцип действия индукционного реле
Подвижный из алюминия или меди диск 3 находится в поле двух магнитных потоков Ф1 и Ф2, которые создаются
переменными токами, протекающими по обмоткам неподвижных электромагнитов 1 и 2. При вращении против часовой стрелки диск преодолевает момент пружины 5 и замыкает контакты 4.
Можно считать, что потоки и токи совпадают по фазе.
Пронизывая диск 3 магнитные потоки Ф1 и Ф2 наводят в диске ЭДС ЕД1 и ЕД2 , которые отстают по фазе от вызвавших их потоков на 90 градусов согласно закону электромагнитной индукции. Под действием этих же потоков в диске создаются вихревые токи IД1 и IД2 , замыкающиеся вокруг оси индуктирующего их магнитного потока и, можно считать, совпадающие с соответствующими ЭДС по фазе.
Известно, что между магнитным потоком и током, находящимся в его поле, возникают электромагнитные силы взаимодействия.
В данном случае это электромагнитные силы соответственно FЭ1 и FЭ2 . Мгновенное значение этих сил меняет свой знак в течение периода, а вращение диска зависит от знака среднего значения сил FЭ1 и FЭ2 . Знак и направление каждой силы определяется углом сдвига фаз между магнитным потоком и взаимодействующим с ним током.
Силы образуют результирующую электромагнитную силу, равную их алгебраической сумме FЭ = FЭ1 + FЭ2 . Результирующая сила создает вращающий момент
Результирующая сила создает вращающий момент
МЭ = FЭ d, где d – плечо силы FЭ . МЭ и FЭ приводят диск 3 в движение, который в зависимости от знак МЭ замыкает или размыкает контакты 4.
Таким образом, принцип работы индукционного реле основан на взаимодействии двух мгновенных потоков с вихревыми токами, индуктируемыми в подвижной системе реле (диске).
Реле имеет наибольший момент при сдвиге фаз магнитных потоков на 90 градусов (ψ = 90°). При ψ = 0 реле не может работать, т.к. МЭ = 0. Знак момента зависит от sinψ , т.е. от сдвига фаз между магнитными потоками Ф1 и Ф2 или создающими их токами I1 и I2 .
При значениях ψ в пределах 0-180° момент МЭ положителен, а при ψ в пределах 180-360 ° он отрицателен. Соответственно и электромагнитная сила изменяет свое направление, а диск вращается в соответствии с ее направлением. FЭ всегда направлена от оси опережающего магнитного потока к оси отстающего магнитного потока.
Время действия индукционных реле
Принцип действия индукционных реле позволяет выполнить их с выдержкой времени без применения специальных часовых механизмов.
Время действия реле зависит от угла α, на который должен повернуться диск для замыкания контактов реле и угловой скорости движения диска ωр. При постоянной скорости tp = α /ωр.
Движение диска происходит под влиянием избыточного момента
Мвр = МЭ – Мс, представляющего собой разность электромагнитного момента и противодействующего ему момента сопротивления. Мвр преодолевает момент инерции подвижной системы Jdω/dt, сообщая ей ускорение dω/dt, т.е.
Мвр = Jdω/dt. Чем больше избыточный момент Мвр, тем больше скорость вращения диска ωр. С увеличением тока Iр в обмотке реле избыточный момент возрастает за счет увеличения электромагнитного момента, который пропорционален Iр2. В результате этого возрастает скорость ωр и соответственно уменьшается время действия реле tp.
Таким образом время действия индукционного реле обратно пропорционально увеличению тока. Такая характеристика времени действия реле называется зависимой (кривая 1).
На практике применяются токовые реле с ограниченно зависимой характеристикой ВВ (кривая 2). Ее особенность в том, что начиная с некоторого значения тока время действия реле не зависит от тока, т.е. остается постоянным.
Характеристика 2 обеспечивается за счет насыщения магнитопровода. При этом увеличение тока Iр не вызывает увеличения магнитных потоков Ф1 и Ф2, в результате чего избыточный момент и обуславленные им скорость вращения диска и ВВ остаются неизменными.
Для повышения ВВ устанавливается постоянный магнит, охватывающий своими полюсами диск. При вращении диск пересекает силовые линии магнитного потока постоянного магнита, в результате чего в нем наводятся токи «резания». От их взаимодействия возникает противодействующий момент, который уменьшает скорость ωр и соответственно увеличивает tр.
От их взаимодействия возникает противодействующий момент, который уменьшает скорость ωр и соответственно увеличивает tр.
ВВ регулируется изменением расстояния между подвижным и неподвижным контактами.
Для увеличения скорости вращения применяется вместо диска цилиндр, что увеличивает ВВ с 0,1с до 0,02 -0,01с.
Инерционный выбег
Вращающийся диск после прекращения действия электромагнитной силы продолжает свое движение по инерции за счет накопленной кинетической энергии, что может привести к замыканию контактов после отключения КЗ в сети. Постоянный магнит снижает, но не исключает полностью инерционный выбег реле. Поэтому ступень селективности защиты при выборе ВВ увеличивается на время инерционной ошибки.
Векторная диаграмма РНМ
Исходным для ее построения принимается вектор напряжения Up. Ток Iн сдвинут по фазе относительно напряжения Up на угол α, а ток Iр – на угол φp.
Ток Iн сдвинут по фазе относительно напряжения Up на угол α, а ток Iр – на угол φp.
Угол α определяется индуктивным и активным сопротивлением обмотки напряжения и называется углом внутреннего сдвига реле. Магнитные потоки Фн и ФТ совпадают с создающими их токами Iн и Iр . Из векторной диаграммы следует, что поток Фн и Фт, а также и токи Iн и Iр сдвинуты по фазе на угол
Ψ = α – φр и что угол Ψ меняется с изменением φр.
Имея ввиду, что Фн ≡ Iн ≡ Uн , ФТ ≡ Iр , а Ψ = α – φр , имеем
МЭ = k1Uр Iр sin(α – φр ) = k1Sp ,
где Sp = Uр Iр sin(α – φр ) – мощность, подведенная к реле.
Знак МЭ определяется знаком sin(α – φр ) и зависит от значения φр. Синус, а следовательно, и МЭ положительны, когда угол Ψ ≠ α – φр находится в пределах 0 – 180°, и отрицательны, если Ψ меняется от 180 до 360°.
На диаграмме зона отрицательных моментов заштрихована. За положительное направление момента МЭ принято его действие против часовой стрелки – на замыкание контакта.
Незащтрихованная часть диаграммы соответствует области положительных моментов, где ФТ опережает Фн а Ψ и его синус имеют положительный знак. Линия АВ называется линией изменения знаков момента и всегда расположена под углом α к вектору Uр , т.е. совпадает с вектором Iн .
При ФТ , опережающем поток Фн, момент МЭ положителен, а при отстающем – отрицателен.
Линия СD называется линией максимальных моментов МЭ.
Угол φр , при котором МЭ достигает максимального значения называется углом максимальной чувствительности φм.ч.
РНМ не действует, если отсутствуют напряжение или ток в реле или если sin(α – φр ) = 0, что имеет место при φр = α и φр = α + 180°.
Три типа реле направления мощности
Изменяя величину угла внутреннего сдвига реле ɑ, можно получить три типа РНМ различающихся характером зависимости МЭ от Фр.
1. При ɑ = 0
МЭ = k1Uр Iр sinφр ,
т. е. МЭ пропорционален реактивной мощности, измеренной на зажимах реле.
е. МЭ пропорционален реактивной мощности, измеренной на зажимах реле.
Такие реле называются синусными или реле направления реактивной мощности.
Реле имеет максимальный вращающий момент
при φр = 90°;
при φр = 0 момент МЭ равен нулю.
Зоны положительных и отрицательных вращающих моментов и линия изменения знака моментов реле (АВ) приведены на рис.
2. При α = 90°
МЭ = kUр Iр sin(90° — φр) = kUр Iр cosφр ,
т.е. момент реле пропорционален активной мощности, подводимой к реле.
Такие реле называются
реле активной мощности или косинусными.
Векторные диаграммы РНМ синусного а) и косинусного б) типов
а)
б)
3. При промежуточном значении угла 0 МЭ = k1Uр Iр sin(α1 – φр).
Такое реле, реагирующее на некоторую долю активной и реактивной мощности, называется реле мощности смешанного типа.
Основные характеристики РНМ
Мощность срабатывания Sср – наименьшая мощность на зажимах реле, при которой оно срабатывает.
Срабатывание реле происходит при условии, что МЭ преодолеет сопротивление пружины Мп и трения МТ.
У современных РНМ при угле максимальной чувствительности, когда sin(α – φр) = 1, Sср = (0,2 – 4) ВА.
Характеристика чувствительности — зависимость Uср = f(Ip) при неизменном φр , где Uср – наименьшее напряжение, необходимое для действия реле (при данных значениях Ip и φр).
Характеристика снимается при φр, равном углу максимальной чувствительности.
В реальности за счет насыщения стали магнитопровода при больших токах Ip напряжение Uср = const.
1
1-теоритическая;
2-действительная
Угловая характеристика представляет собой зависимость Uср = f(φр) при неизменном Ip . Она может быть получена из выражения
МЭ = k1Uр Iр sin(α – φр ) = k1Sp
при фиксированных значениях Ip и α.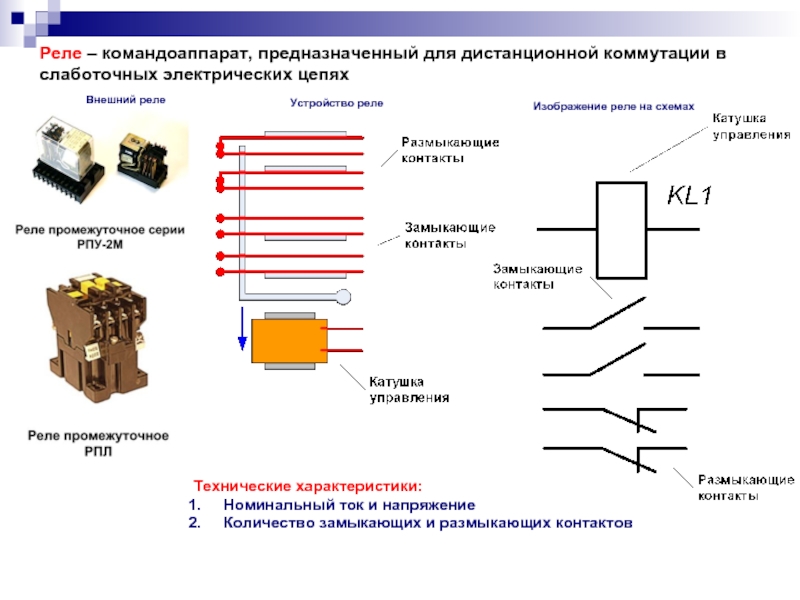
Угловая характеристика позволяет определить:
а) изменение чувствительности реле (характеризуемое величиной Uср) при разных углах φр;
б) минимальную величину Uср.мин и наиболее выгодную зону углов φр , в пределах которой Uср близко Uср.мин ;
в) при каких углах φр меняется знак электромагнитного момента и пределы углов φр , которым соответствуют положительные и отрицательные моменты.
Время действия РНМ зависит от величины мощности на зажимах реле, характеризуемой отношением Sp/Scp.
При мощности Sp, близких к Scp, ВВ достаточно велики и только при Sp/Scp > 3-4 реле работает с минимальным временем.
Направленное реле максимального тока
— конструкция, принцип работы и применение
Реле максимального тока срабатывает при протекании тока короткого замыкания в любом направлении, т. е.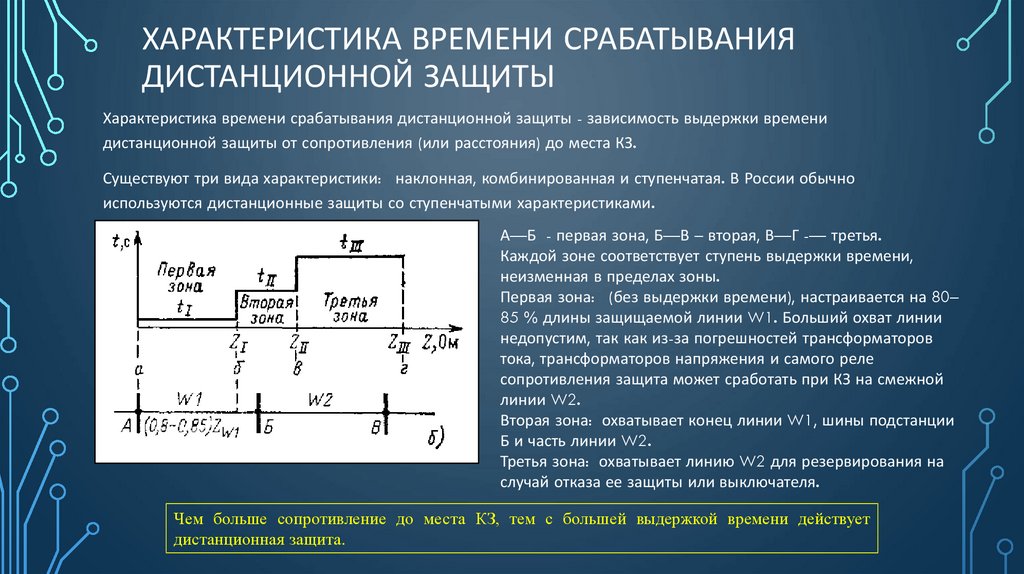 в прямом или обратном направлении. Чтобы обеспечить работу реле в прямом направлении, к реле максимального тока добавляется направленная функция путем добавления направленного реле к реле максимального тока, такое реле будет реагировать на поток неисправности в определенном направлении.
в прямом или обратном направлении. Чтобы обеспечить работу реле в прямом направлении, к реле максимального тока добавляется направленная функция путем добавления направленного реле к реле максимального тока, такое реле будет реагировать на поток неисправности в определенном направлении.
Принцип направленного реле максимального тока :
Направленное реле максимального тока работает по тому же принципу, что и реле максимального тока. Но в реле максимального тока крутящий момент создается за счет магнитных полей, создаваемых рабочим током цепи, подаваемым через трансформатор тока.
В то время как в случае направленного реле максимальной токовой защиты крутящий момент создается за счет магнитных полей, создаваемых как рабочим током, так и напряжением цепи, к которой оно подключено для защиты. Реле срабатывает, когда ток превышает заданное заданное значение в заданном направлении.
Конструкция направленного реле максимального тока:
Принципиальная схема направленного реле максимального тока показана на рисунке ниже. Он состоит из двух релейных блоков, смонтированных в общем корпусе, а именно:
Он состоит из двух релейных блоков, смонтированных в общем корпусе, а именно:
- Блок направленного реле и
- Блок ненаправленного реле или реле максимального тока.
Направленный блок реле:
Направленный блок в основном состоит из индукционного реле с двумя противоположными полюсами, питаемыми напряжением и током. Потенциальная катушка на верхнем электромагните подключена к напряжению системы через трансформатор напряжения. Катушка на нижнем электромагните питается током цепи, подключенным через трансформатор тока.
Напряжение принимается как поляризационная величина, которая остается более или менее постоянной, когда другая величина, т. е. ток, претерпевает значительные изменения фазового угла.
Два потока производятся двумя величинами для производства крутящего момента. Контакты направленного блока соединены последовательно с другой обмоткой над нижним магнитом ненаправленного или токового блока.
Блок ненаправленного реле или реле максимального тока:
Блок максимального тока может быть либо с экранированными полюсами, либо с ваттметром. Катушка, намотанная на верхний электромагнит блока максимального тока, имеет ответвления и подключена к току цепи через трансформатор тока.
Катушка, намотанная на верхний электромагнит блока максимального тока, имеет ответвления и подключена к току цепи через трансформатор тока.
Отводы подключены к мосту настройки штекера для получения требуемой настройки тока. Алюминиевый диск помещается между двумя магнитами, состоящими из подвижного контакта, который замыкает неподвижный контакт (контакты цепи отключения) после срабатывания блока реле направления.
Работа направленного реле максимальной токовой защиты:
В условиях неисправности ток неисправности протекает через токовую катушку реле, которая создает поток в нижнем магните направленного блока, в то время как ток в катушке напряжения создает другой поток в верхнем магнит направляющего устройства. Два потока создают положительный крутящий момент, который стремится закрыть контакт и привести в действие реле.
Это, в свою очередь, заставляет ток реле течь через обмотку над верхним магнитом блока максимального тока и, следовательно, создает магнитный поток в этом магните. Этот поток индуцирует всю ЭДС в обмотке над нижним магнитом МТЗ.
Этот поток индуцирует всю ЭДС в обмотке над нижним магнитом МТЗ.
Поскольку эта обмотка представляет собой замкнутый контур, ЭДС индукции циркулирует по току, который, в свою очередь, создает другой поток. Два потока создают крутящий момент, который заставляет реле максимального тока отключать автоматический выключатель.
Понятно, что работой реле максимального тока управляет направленный блок. Следовательно, направляющий блок должен сработать первым, чтобы сработало реле максимального тока.
Применение направленного реле максимального тока:
- Защита параллельного фидера — Ниже показана схема защиты параллельного фидера.
Ненаправленные реле A 1 и B 1 необходимы на передающем конце фидеров. Направление рабочих реле указано стрелками (↔). На приемном конце фидеров требуются направленные реле максимального тока. Реле A 2 и B 2 являются направленными реле максимальной токовой защиты. Направления работы этих реле указаны стрелкой ( ←).
 При неисправности F на фидере ток в фидере меняется на противоположный, и это замыкает направленное реле A 9.0055 2 срабатывает и отключает фидер. Таким образом, неисправный фидер изолируется от системы, а непрерывность питания сохраняется через исправный фидер.
При неисправности F на фидере ток в фидере меняется на противоположный, и это замыкает направленное реле A 9.0055 2 срабатывает и отключает фидер. Таким образом, неисправный фидер изолируется от системы, а непрерывность питания сохраняется через исправный фидер. - Параллельная защита фидера. Как показано на рисунке ниже, для обеспечения селективности реле на шинах со стороны источника являются ненаправленными, в то время как на шинах со стороны нагрузки используются направленные реле. Поскольку направленные реле должны срабатывать раньше ненаправленных, реле устанавливаются на более низкие настройки времени и тока.
- Защита системы кольцевой сети. Схема защиты системы кольцевой сети показана на рисунке ниже. Реле на шинах источника (A 1 , B 1 .. F 1 ) являются ненаправленными, поскольку реле могут не срабатывать при повреждениях вблизи источника, реле, связанные непосредственно с неисправным участком кольца, должны работать. Итак, для достижения этой дискриминации используются направленные реле (A 2 , B 2 … F 2 ).
- Защита от асинхронного хода для синхронных двигателей.
- Направленная защита в сетях с симметричной нагрузкой, измерение активной и реактивной мощности в сетях с нейтралью и без нее.
- Направленная защита от замыканий на землю — В этом типе реле катушка напряжения активируется остаточным напряжением, принцип действия реле, используемого в этой схеме, основан на остаточном токе. В нормальных условиях работы остаточный ток будет равен нулю. При возникновении неисправности дифференциальный ток будет иметь некоторое значение, и если этот ток превысит указанное значение, реле сработает. Реле определяет направление, в котором происходит замыкание на землю относительно перемещения реле.
 При неисправности F на фидере ток в фидере меняется на противоположный, и это замыкает направленное реле A 9.0055 2 срабатывает и отключает фидер. Таким образом, неисправный фидер изолируется от системы, а непрерывность питания сохраняется через исправный фидер.
При неисправности F на фидере ток в фидере меняется на противоположный, и это замыкает направленное реле A 9.0055 2 срабатывает и отключает фидер. Таким образом, неисправный фидер изолируется от системы, а непрерывность питания сохраняется через исправный фидер. Итак, для достижения этой дискриминации используются направленные реле (A 2 , B 2 … F 2 ).
Итак, для достижения этой дискриминации используются направленные реле (A 2 , B 2 … F 2 ).Реле направления индукционного типа | Приборы
РЕКЛАМА:
В этой статье мы поговорим о направленных реле индукционного типа, используемых в электрической цепи.
Направленное силовое реле индукционного типа:
Ненаправленное реле может срабатывать при возникновении неисправности в любом направлении. Для того чтобы добиться срабатывания для разлома, протекающего в определенном направлении, необходимо добавить направленный элемент к ненаправленному элементу.
Реле направления (или реверса) мощности срабатывает, когда мощность через реле будет реверсивной, т. е. питание генератора в сеть отсутствует, и питание от других источников в системе пытается подать питание на этот блок в обратном направлении. В случае двигателей такое реле используется для предотвращения изменения направления вращения двигателей.
РЕКЛАМА:
Принцип действия этого реле аналогичен принципу действия реле максимального тока (ненаправленного) индукционного. Отличие заключается в том, что в реле максимального тока момент развивается за счет взаимодействия магнитных полей, полученных от тока в цепи через ТТ, а в случае направленного силового реле управляющий момент получается за счет взаимодействия полей производится как от источников напряжения, так и от источников тока защищаемой цепи.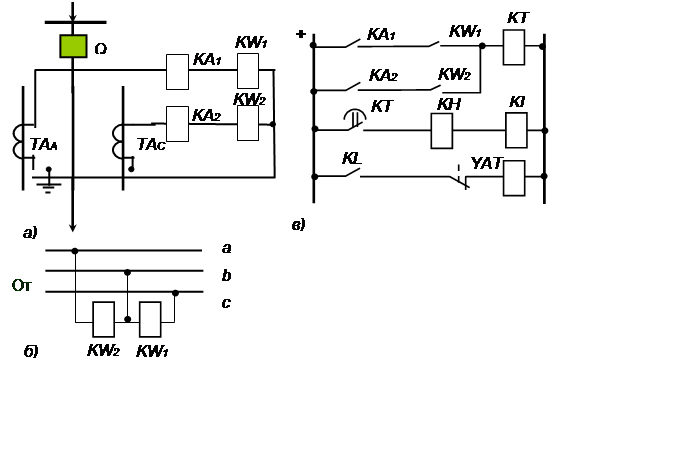 Поскольку реле имеет катушки как напряжения, так и тока, реле, по сути, представляет собой ваттметр, и направление крутящего момента, развиваемого в реле, зависит от направления тока по отношению к напряжению, с которым оно связано, т. е. реле распознает разность фаз между напряжение и ток.
Поскольку реле имеет катушки как напряжения, так и тока, реле, по сути, представляет собой ваттметр, и направление крутящего момента, развиваемого в реле, зависит от направления тока по отношению к напряжению, с которым оно связано, т. е. реле распознает разность фаз между напряжение и ток.
Детали конструкции:
Направленное силовое реле индукционного типа по существу состоит из алюминиевого диска, который может свободно вращаться между полюсами двух электромагнитов. Верхний электромагнит имеет обмотку, называемую катушкой напряжения или потенциала, на среднем плече подключенную к цепи источника напряжения через трансформатор напряжения (ПТ). Нижний электромагнит имеет отдельную обмотку, называемую токовой катушкой, подключенную к вторичной обмотке ТТ в защищаемой линии. Токовая катушка снабжена несколькими ответвлениями, соединенными со штепсельной перемычкой, чтобы обеспечить желаемую настройку тока. Удерживающий момент обеспечивается спиральной пружиной.
Операция:
РЕКЛАМА:
Крутящий момент, развиваемый диском, подвешенным между двумя магнитами, пропорционален VI. Когда мощность течет в нормальном направлении, крутящий момент, развиваемый на диске, поддерживаемом пружиной, имеет тенденцию отклонять подвижный контакт от неподвижных контактов цепи отключения. Таким образом, реле остается нерабочим. Изменение направления тока в цепи изменяет крутящий момент, создаваемый на диске, и когда он достаточно велик, чтобы преодолеть крутящий момент управляющей пружины, диск вращается в обратном направлении, и подвижный контакт замыкает цепь отключения. Это вызывает срабатывание автоматического выключателя для отключения неисправной секции. Реле можно сделать очень чувствительным, если использовать очень легкую управляющую пружину, так что очень маленькое изменение направления мощности вызовет срабатывание реле.
Когда мощность течет в нормальном направлении, крутящий момент, развиваемый на диске, поддерживаемом пружиной, имеет тенденцию отклонять подвижный контакт от неподвижных контактов цепи отключения. Таким образом, реле остается нерабочим. Изменение направления тока в цепи изменяет крутящий момент, создаваемый на диске, и когда он достаточно велик, чтобы преодолеть крутящий момент управляющей пружины, диск вращается в обратном направлении, и подвижный контакт замыкает цепь отключения. Это вызывает срабатывание автоматического выключателя для отключения неисправной секции. Реле можно сделать очень чувствительным, если использовать очень легкую управляющую пружину, так что очень маленькое изменение направления мощности вызовет срабатывание реле.
Реле может быть однофазным или трехфазным, имеющим два элемента напряжения и два элемента тока, как трехфазный счетчик электроэнергии.
Рабочие характеристики:
Пусть V — напряжение, подаваемое на реле через PT, а I — ток реле через CT. На векторной диаграмме (рис. 3.31) показано, что I опережает напряжение реле V на угол θ. Здесь ɸ В представляет собой поток, обусловленный катушкой напряжения, и отстает от напряжения на угол ɸ (около 60° до 70°) и ɸ I представляет собой поток из-за катушки тока и находится в фазе с током I. Чистый крутящий момент создается из-за взаимодействия ɸ I и ɸ V .
На векторной диаграмме (рис. 3.31) показано, что I опережает напряжение реле V на угол θ. Здесь ɸ В представляет собой поток, обусловленный катушкой напряжения, и отстает от напряжения на угол ɸ (около 60° до 70°) и ɸ I представляет собой поток из-за катушки тока и находится в фазе с током I. Чистый крутящий момент создается из-за взаимодействия ɸ I и ɸ V .
Крутящий момент, следовательно, дается как –
T ∝ ɸ V ɸ I sin (ɸ + θ), где ɸ V ∝ V и ɸ I ∝ I
Таким образом, уравнение крутящего момента для реле можно представить как –
T = K V I sin (ɸ + θ) … (3.10)
ОБЪЯВЛЕНИЙ:
Крутящий момент максимален, когда два потока смещены на 90°, т. е. когда (ɸ + θ) = 90°. Здесь пунктирная линия на векторной диаграмме представляет желаемое положение ɸ I для максимального крутящего момента. Поскольку V является эталонной величиной, а ɸ V имеет фиксированное положение по отношению к V для конкретной конструкции, угол между пунктирной линией и эталонной величиной V известен как угол максимального крутящего момента и пусть он обозначается τ.
Нулевой крутящий момент будет иметь место, когда sin (ɸ + θ) = 0, т. е. (ɸ + θ) = 0° или 180°, это выполняется, когда вектор тока реле лежит вдоль пунктирной линии цепи, которая находится под прямым углом к максимуму линия крутящего момента. Таким образом, элемент направления будет работать при условии, что вектор тока находится в пределах ± 90° линии максимального крутящего момента. Если текущий фазовращатель смещен более чем на 90°, элемент направления будет сдерживаться. На рисунке показаны рабочие и нерабочие области.
Видно, что –
τ = 90° – ɸ
РЕКЛАМА:
или ɸ = 90° – τ …(3.11)
и уравнение крутящего момента становится
T = KV I sin (θ + 90° – τ)
= KV I cos (θ – τ) …(3.12)
Когда реле вот-вот запустится, пренебрегая жесткостью пружины,
В I cos (θ – τ) = 0
или θ – τ = 90°
или θ = τ + 90° …(3.13)
Это уравнение, описывающее полярную характеристику (рис. 3.32) направленного реле.
Зона между пунктирной линией и параллельной ей линией соответствует крутящему моменту пружины. Если текущий вектор лежит в пределах этих линий, развиваемый крутящий момент меньше, чем крутящий момент пружины, и, следовательно, реле не срабатывает. Если вектор тока пересекает пунктирную линию, рабочий крутящий момент превышает крутящий момент пружины, и, следовательно, реле срабатывает. Реле не срабатывает или сбрасывается для любого вектора тока, находящегося в области отрицательного крутящего момента.
Можно отметить, что ток системы обычно отстает от напряжения системы, но ток реле опережает напряжение реле путем включения сопротивления или емкости или их комбинации последовательно с катушкой напряжения или потенциала.
Такие реле очень подходят для защиты параллельных фидеров. Направленное реле максимального тока имеет недостаток, заключающийся в том, что напряжение фидера падает до гораздо более низкого значения, когда возникает неисправность, приводящая к неработоспособности реле. Этот недостаток может быть устранен компенсацией вторичной обмотки реле на нижнем магните.
Этот недостаток может быть устранен компенсацией вторичной обмотки реле на нижнем магните.
Ампер-витки компенсационной обмотки на нижнем магните противостоят ампер-виткам, вырабатываемым токовой катушкой. Следовательно, витки катушки тока должны быть соответствующим образом увеличены. Когда напряжение падает из-за неисправности на фидере, результирующие ампер-витки, обеспечиваемые обмотками нижнего электромагнита, совместно увеличиваются, компенсируя уменьшенные ампер-витки, обеспечиваемые катушкой напряжения.
Направленное реле максимальной токовой защиты и защиты от замыканий на землю индукционного типа: Реле направленной мощности нельзя использовать в качестве направленного защитного реле в условиях короткого замыкания, потому что в условиях короткого замыкания напряжение в системе падает до низкого значения, и поэтому крутящий момент, развиваемый в реле, может быть недостаточным для его срабатывания. Эта трудность преодолевается в направленном реле максимального тока, которое почти не зависит от напряжения и коэффициента мощности системы.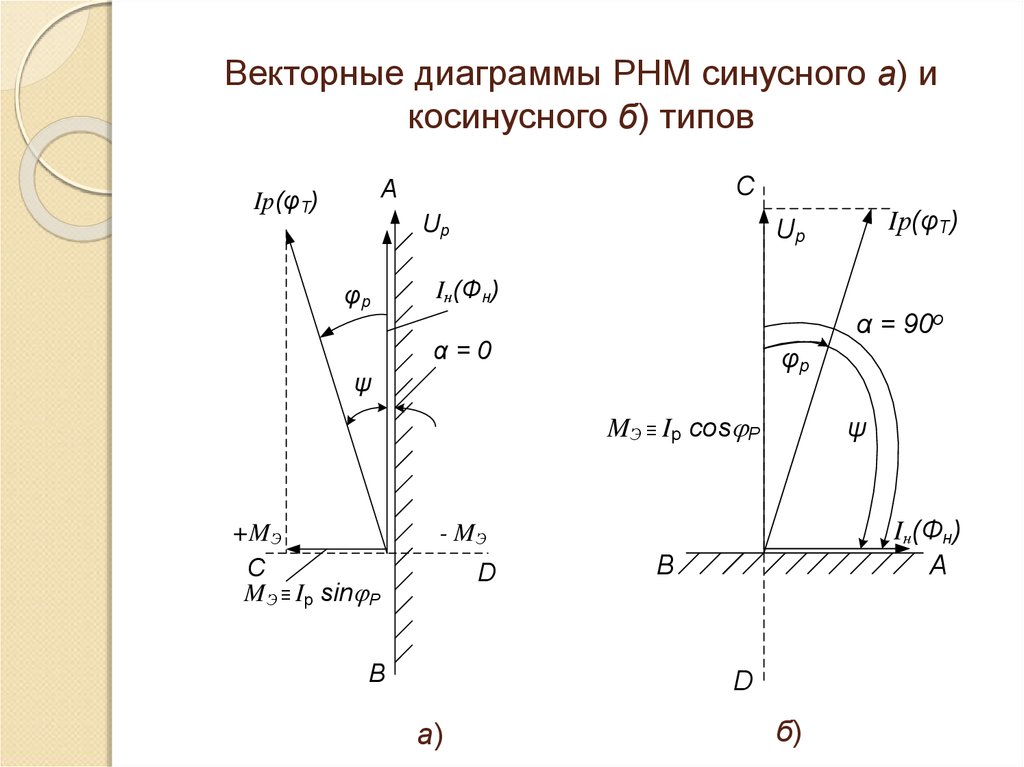
Детали конструкции:
Состоит из двух релейных элементов, а именно:
(i) Элемент направления и
(ii) Ненаправленный элемент, смонтированный в общем корпусе.
Направленный элемент по сути представляет собой направленное силовое реле. Катушка напряжения этого элемента подключена к напряжению цепи через PT, а его токовая катушка питается от тока цепи через CT. Эта обмотка проходит над верхним магнитом ненаправленного элемента. Отключающие контакты направляющего элемента соединены последовательно с вторичной цепью элемента максимального тока. Таким образом, элемент максимального тока не может начать работать, пока его вторичная цепь не будет завершена, т. е. сначала должен сработать направленный элемент, чтобы привести в действие элемент максимального тока.
Ненаправленный элемент — это элемент максимального тока, аналогичный во всех отношениях ненаправленному реле максимального тока. Реле замыкания на землю шпинделя диска этого элемента имеет подвижный контакт, который замыкает контакты цепи отключения после срабатывания направленного элемента. Отводы предусмотрены над верхним магнитом элемента максимального тока и соединены с перемычкой, что обеспечивает возможность установки тока.
Отводы предусмотрены над верхним магнитом элемента максимального тока и соединены с перемычкой, что обеспечивает возможность установки тока.
В нормальных условиях работы поток энергии в цепи, защищенной реле, имеет нормальное направление. Таким образом, реле направления мощности (нижний элемент) не срабатывает, тем самым оставляя элемент максимального тока (верхний элемент) обесточенным. Но как только происходит реверс тока или мощности, диск реле реверсивной мощности (нижний элемент) начинает вращаться и замыкает цепь элемента максимального тока. Из-за перегрузки по току в диске создается крутящий момент, и действие замыкает цепь отключения, тем самым позволяя выключателю сработать и изолировать неисправную секцию.
Направленный элемент сделан максимально чувствительным, чтобы обеспечить его стабильную работу — даже 20% мощности в обратном направлении приводят в действие его.
Реле работает только когда:
(i) Направление тока обратное
(ii) Ток в обратном направлении превышает заданное значение и
(iii) Чрезмерный ток (больше текущего значения) сохраняется в течение времени, превышающего установленное время.
Направленные реле должны иметь следующие характеристики:
(i) Высокая скорость работы
(ii) Высокая чувствительность
(iii) Адекватная кратковременная тепловая мощность
(iv) Способность работать при низких значениях напряжения
(v) Бремя не должно быть чрезмерным и
(vi) Не должно быть проскальзывания напряжения и тока, т. е. если только катушка напряжения или только катушка тока находится под напряжением, а другая обесточена, не должно быть никакого движения.
Индукционные чашки удовлетворяют вышеуказанным требованиям и поэтому очень популярны. Такие реле используются, когда защита от перегрузки с градуированной выдержкой времени применяется к кольцевым сетям и взаимосвязанным сетям, поскольку ток короткого замыкания может течь в любом направлении.
Соединения направленного реле максимального тока:
Соединения реле должны быть выполнены таким образом, чтобы токи и напряжения, подаваемые на реле при различных неисправностях, которые могут возникнуть на защищаемом участке цепи, обеспечивали реле положительный и достаточно большой рабочий момент. Чтобы добиться этого для всех типов неисправностей, реле не могут быть подключены для работы на истинных ваттах, поскольку для некоторых неисправностей напряжение будет чрезвычайно низким, а также коэффициент мощности будет очень малым, что приведет к ничтожно малому крутящему моменту. Чтобы преодолеть эту трудность и, таким образом, обеспечить достаточный крутящий момент, на каждое реле подается ток и напряжение.
Чтобы добиться этого для всех типов неисправностей, реле не могут быть подключены для работы на истинных ваттах, поскольку для некоторых неисправностей напряжение будет чрезвычайно низким, а также коэффициент мощности будет очень малым, что приведет к ничтожно малому крутящему моменту. Чтобы преодолеть эту трудность и, таким образом, обеспечить достаточный крутящий момент, на каждое реле подается ток и напряжение.
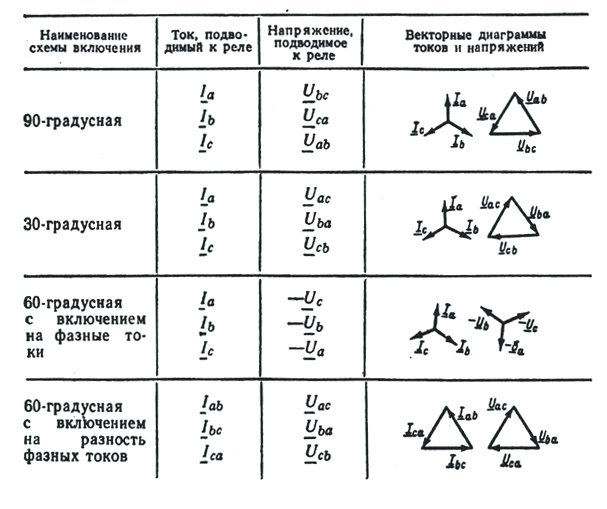
Используются два типа релейных соединений. Направленные соединения элементов удобно и широко описываются в терминах угла, на который единичный коэффициент мощности (UPF) сбалансированного тока нагрузки, протекающего в направлении отключения, опережает приложенное напряжение, приложенное к катушке напряжения реле, с учетом полярности катушек реле. .
Используются два типа соединений реле:
(i) Реле 30° с максимальным углом крутящего момента 0°.
(ii) Реле 90° с максимальным углом крутящего момента 45°
Угол реле определяется как угол между напряжением и током, подаваемым на реле в условиях сбалансированного трехфазного коэффициента мощности.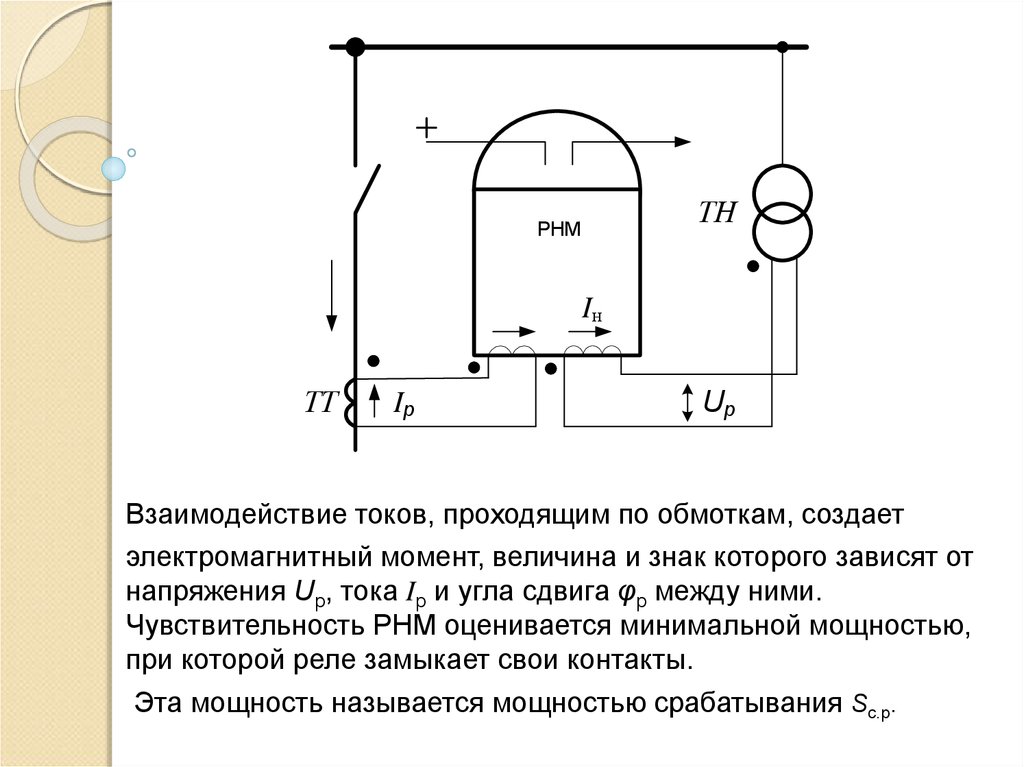
На векторной диаграмме для направленного реле 0° с нулевым максимальным углом крутящего момента I R , I Y , I B и V R , V Y , V B представляют фазные токи и фазы напряжения трехфазной симметричной системы с коэффициентом мощности, равным единице. Фазор В RB , представляющий напряжение системы между красной и синей фазами, отстает от векторов I R и V R на 30°. Пусть на релейный элемент подается ток I R и напряжение V RB в соотношении фаз, как показано, т. е. I R опережает V RB на 30°. Поэтому соединения называются реле 30°.
Угол между током и напряжением, подаваемым на реле для максимального крутящего момента, T равен нулю, поэтому положение вектора тока реле для максимального крутящего момента будет вдоль V РБ . Также, поскольку согласно уравнению (3.12).
T = KVI cos (θ – τ)
= KVI cos θ для τ = 0
Теперь для условия коэффициента мощности, равного единице, т. е. ток системы I R совпадает по фазе с напряжением системы, ток реле I R опережает напряжение реле V RB на 30°, т. е. θ = 30°, так что развиваемый крутящий момент
е. ток системы I R совпадает по фазе с напряжением системы, ток реле I R опережает напряжение реле V RB на 30°, т. е. θ = 30°, так что развиваемый крутящий момент
T = KVI cos 30° = 0,866 KVI … (3.14)
Пока ток системы I R отстает от напряжения системы V R на 30°, ток реле I R будет в фазе с напряжением реле V RB , так что θ = 0° и развиваемый крутящий момент будет максимальным и определяется как –
Т = КВИ … (3.15)
При возникновении неисправности I R может отставать от V R , скажем, на 90°, и в этом случае θ будет составлять 60°, а развиваемый крутящий момент будет 0,5 T max .
Таким образом, мы видим, что начальное опережение 30° делает реле более чувствительным при малых коэффициентах мощности. Такие реле обычно подходят для простых фидеров.
Векторная диаграмма для 90°-реле с максимальным углом крутящего момента 45°.
Поскольку угол между током и напряжением, подаваемым на реле для максимального крутящего момента, τ составляет 45°, развиваемый крутящий момент будет максимальным при θ = 45° и определяется как –
T max = KVI cos (θ – τ) = KVI cos(45° – 45°) = K V I
, а крутящий момент для соединения под углом 90° составит T = KVI cos (90°-45°) = 0,707 KVI = 0,707 T max .
Подключение источника напряжения для обеспечения остаточного напряжения:
Направленное реле, контролирующее замыкания на землю на всех трех фазах цепи 3-ɸ, получает питание от остаточного тока и остаточного напряжения. Остаточный ток получается путем суммирования токов в трех фазах с использованием линейных трансформаторов тока или трансформатора тока нулевой последовательности. Первое встречается чаще. Для трех линейных токов I R , I Y , I B .
I R + I Y + I B = 0 для здоровых условий
I R + I Y + I B = I RES для замыкания на землю на одной фазе.
Подходящим источником остаточного напряжения может быть вторичная обмотка с разомкнутым треугольником на трех однофазных трансформаторах или эквивалентный трехфазный пятистержневой трансформатор напряжения. Применение ломаного треугольника для обеспечения остаточного напряжения показано на рис. 3.39. При нормальных рабочих (или нормальных) условиях векторы вторичного напряжения образуют замкнутый треугольник, и поэтому на потенциальной катушке реле не появляется напряжение, как показано на рис. 3.39.(а).
При возникновении замыкания на землю на любой линии, скажем, в точке F на линии B на рис. 3.39 (b), вектора напряжения такие, как показано, оставляя остаточное напряжение V RES на вторичной обмотке с разомкнутым треугольником, которое представляет собой напряжение, появляющееся на катушка напряжения направляющего элемента реле. Величина и фаза этого остаточного напряжения будут зависеть от величины тока замыкания на землю и импеданса пути повреждения.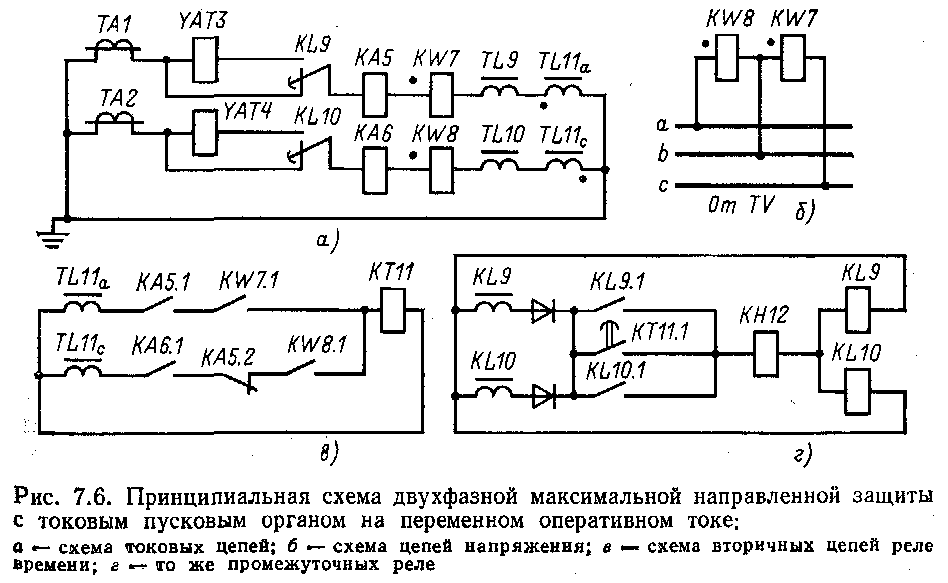
Соединения для реле направления замыкания на землю показаны на рис. 3.40. Момент, развиваемый на реле, будет пропорционален V РЭС I РЭС cos (θ – τ) где τ угол максимального крутящего момента реле, θ угол между V РЭС и I РЭС .
Главная ›› Электротехника ›› Устройства ›› Реле ›› Реле направления индукционного типа
Реле направленного тока [67]: Цифровые реле
Пожалуйста, поделитесь и распространите информацию:
В этом посте объясняется работа реле направленного тока вместе с его настройками. Подробное объяснение настроек реле направления с Характеристический угол , Максимальный угол крутящего момента и Приведены напряжения поляризации .
Цифровой Направленное реле максимального тока Принцип действия направленного максимального тока: Направленное реле максимального тока работает в прямом или обратном направлении с защитой от перегрузки по току.
Если направленное реле, установленное в прямом направлении, означает, что неисправность возникает в прямом направлении. зона, то работает только реле. И наоборот, если реле установлено в положение Reverse направление означает, что если неисправность возникает в зоне реверса, то срабатывает только реле.
Обычно означает, что прямое направление относится к потоку мощности от сборной шины (к защищенной зоне), а обратное направление означает, что мощность течет к шина.
Реле направления Характеристики:Реле направления определяют зону срабатывания с помощью поляризующего напряжения и характеристического угла .
Рабочие характеристики направленного реле- Поляризационное напряжение:
Направленным реле требовалось эталонное напряжение для определения направления тока. Это напряжение, взятое с трансформаторов напряжения .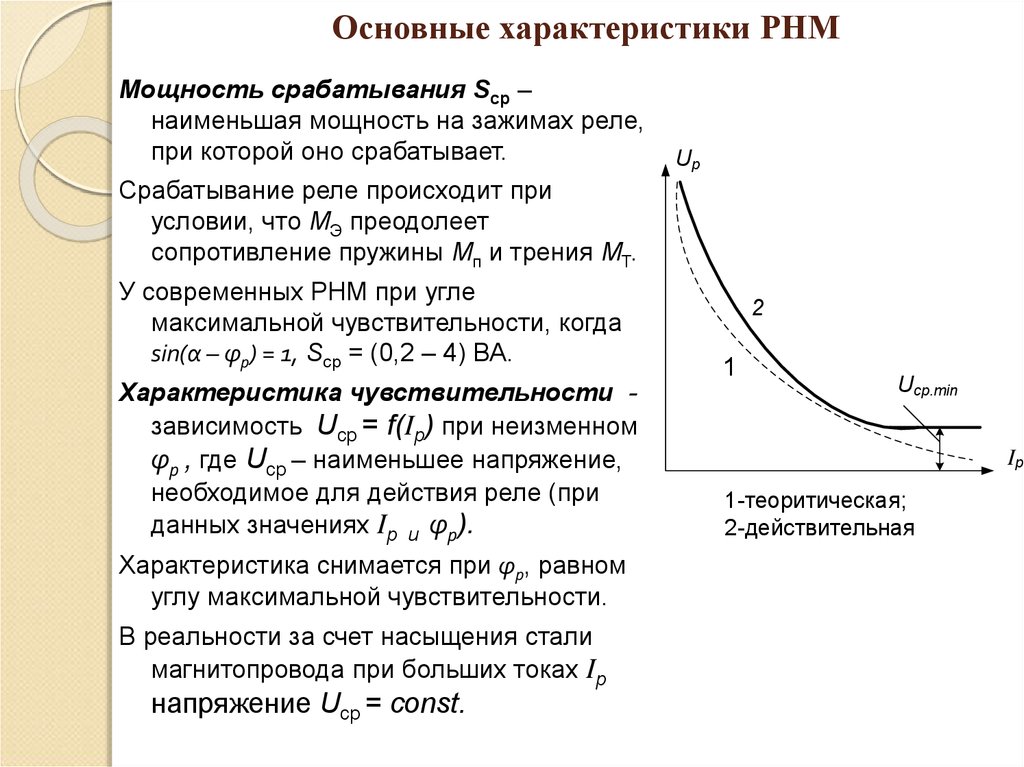 Опорное напряжение называется напряжением поляризации. Реле срабатывает в определенном направлении, когда ток короткого замыкания имеет то же направление и превышает установленное значение перегрузки по току.
Опорное напряжение называется напряжением поляризации. Реле срабатывает в определенном направлении, когда ток короткого замыкания имеет то же направление и превышает установленное значение перегрузки по току.
- Характеристический угол реле: RCA
характеристический угол — это фазовый угол, на который эталонный или поляризационный напряжение регулируется таким образом, чтобы направленное реле срабатывало с максимальным чувствительность.
Характеристический угол также называется Направленный угол, так как он определяет направление работы реле.
- Максимальный угол крутящего момента: MTA
Максимальный угол крутящего момента — это угол, образуемый током короткого замыкания по отношению к его фазе. Напряжение. Это ожидаемый угол разлома и полностью предсказуемый. Этот угол отличается для фазных замыканий и замыканий на землю.
- Центр зоны или линия максимального крутящего момента:
Центр
зона – это линия, образованная Char Angle, где реле проявляет максимальную чувствительность. В этой линии ток реле находится в фазе с опорным или поляризованным.
Напряжение.
В этой линии ток реле находится в фазе с опорным или поляризованным.
Напряжение.
- Линия нулевого крутящего момента:
Это граничная линия, которая разделяет плоскость на области действия и запрета.
- Зона переадресации:
Зона переадресации составляет +/- 85° по обе стороны от Линия максимального крутящего момента или линия центра передней зоны.
- Обратная зона:
Обратная рабочая зона является зеркальным отражением передней зоны.
- Изменения, происходящие во время неисправности:
Всякий раз, когда возникает неисправность на линии электропередачи или шинах, напряжение снижается пропорционально серьезности неисправности, а ток увеличивается больше, чем нормальный ток. Ток замыкания носит запаздывающий характер. Здоровые фазовые величины и углы не изменены.
Направленная защита от перегрузки по току Настройки: Должно быть
заметил, что направленная перегрузка по току различна для фазы и
замыкания на землю. Различие заключается в выборе поляризующих напряжений.
Различие заключается в выборе поляризующих напряжений.
- Поляризационные напряжения:
элементы направленного замыкания фазы работают с квадратурным соединением для предотвращения потеря поляризующей величины при фазовых замыканиях. То есть каждый из текущих элементов управляется напряжением, полученным от двух других фаз.
Это соединение вводит фазовый сдвиг на 90° (опережающее напряжение тока) между эталонные и рабочие объемы.
Каждая фаза ток сравнивается с напряжением между двумя другими фазами. Как I L1 сравнивается с V 23 .
Эти Поляризационное напряжение определяется внутри самого реле. Нет необходимости устанавливать внешне.
- Максимальный угол крутящего момента:
Ожидаемый
угол ошибки называется Максимальный крутящий момент
угол в Электромеханических реле.
(Этот угол обычно -30 o для ВЛ и -45 o для подземные кабели для фазовых замыканий.)
Используется для расчета Характеристического угла и определения центра зоны. Здесь нет настройка максимального угла крутящего момента в числовых реле.
- Установка характеристического угла:
Реле Характеристический угол RCA приведен в реле Настройки защиты от замыкания фазы. Диапазон составляет (от -95 до +95 градусов). Настройка Char Angle должна быть указана при настройке Directional over current. реле.
Пример:
Например считать, что замыкание фазы происходит при угле -30 o . Отставание по току неисправности напряжение на 30 o .[Это максимальный угол крутящего момента]
Характеристический угол = 90 o [Угол квадратуры] – Максимальный угол крутящего момента
Характеристический угол = 90-30=60 o .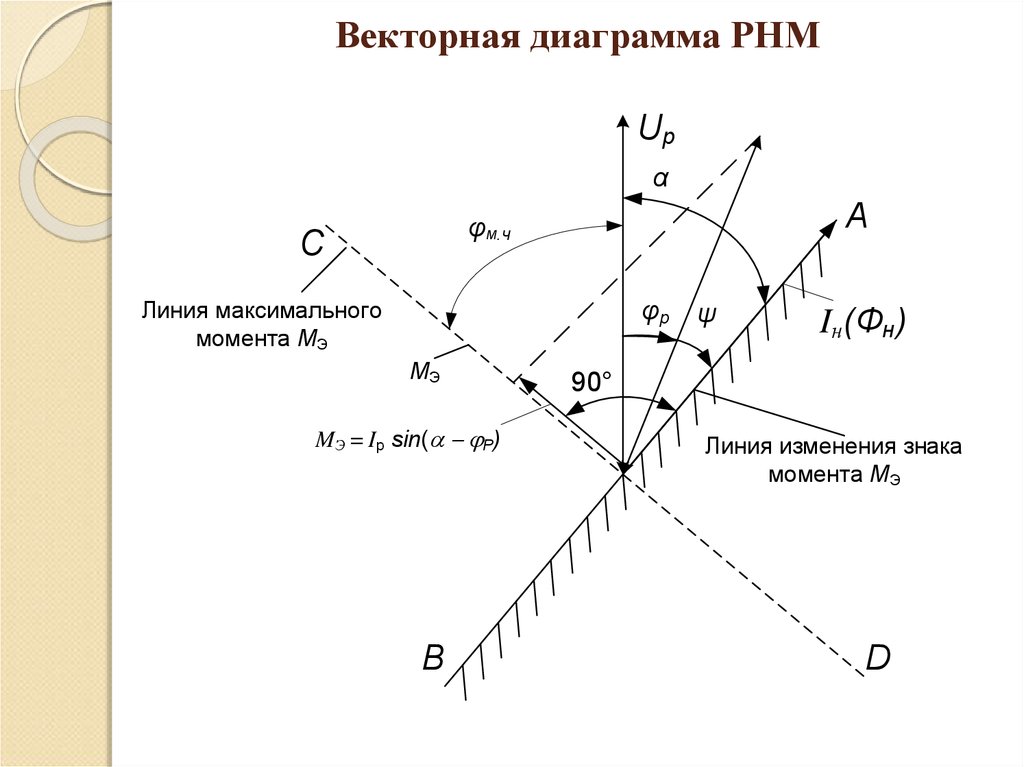
- Центр передней зоны :
Это зона, в которой реле срабатывает с максимальной чувствительностью.
Центр передней зоны = Vref Угол + Угол Хар
= 0 O + 60 O
= 60 O
- . установленный уровень, направленный выход не выдается, и, следовательно, защита направления будет запрещена.
Настройка минимального напряжения предотвращает неправильную работу реле в условиях перегорания предохранителя или срабатывания MCB.
Направленная защита от перегрузки по току для замыканий на землю:Каждое замыкание на землю в реле рассчитывается как измеренное или прямое замыкание на землю. Выбор напряжения поляризации для этих двух типов замыканий на землю отличается.
Чтобы понять разницу между измеренными замыканиями на землю и производными замыканиями на землю Прочтите здесь .
2. Защита направленного тока для Измеренные замыкания на землю: [67G]
- Поляризационные напряжения:
элементы направленной защиты от замыканий на землю для обнаружения замыканий на землю Нулевая последовательность фаз используется метод поляризации. Поляризация напряжения достигается для элементы замыкания на землю (они отличаются от замыканий на землю) путем сравнения соответствующий ток I 0 с его эквивалентным напряжением V 0 .
Эти напряжения доступны только в условиях замыкания на землю. Напряжение неисправные фазы обрываются, а остальные фазы остаются здоровыми.
Эти поляризационные напряжения определяются внутри самого реле. Нет необходимости устанавливать снаружи.
- Максимальный угол крутящего момента:
Ожидаемый угол ошибки называется Максимальный крутящий момент угол в Электромеханических реле.
(Этот угол обычно варьируется от 0 до до -90 o зависит от типа используемого заземления нейтрали.
)Для резистивного Системы заземления = 0 o
Заземление Трансформатор с резистором = – 15 или
сплошь Заземленная распределительная система = -45 o
Надежно Заземленная система передачи = -65 o
Реактивное сопротивление Заземленные системы = -90 o
Используется для расчета Характеристического угла и определения центра зоны. Здесь нет настройка максимального угла крутящего момента в числовых реле.
- Установка характеристического угла:
Реле Характеристический угол RCA приведен в уставки реле защиты от замыкания на землю. Диапазон составляет (-9от 5 до +95 градусов). Настройка Char Angle должна быть указана при настройке реле Directional OC.
Пример:
Например, рассмотрим замыкание на землю под углом -15 o в системе с заземлением через сопротивление. Ток повреждения отстает от напряжения на 15 o .
[Это максимальный угол крутящего момента]Характеристический угол = 0 o – Максимальный угол крутящего момента
Характеристический угол = 0-15=-15 o .
Настройка характеристического угла для замыканий на землю- Центр передней зоны :
Это зона, в которой реле срабатывает с максимальной чувствительностью.
Центр передней зоны = Vref Угол + Угол чара
= 0 O -15 O
= -15 o
- Настройка минимального напряжения:
Это общая настройка для любого типа неисправности. Как упоминалось ранее, когда измеренное напряжение поляризации падает ниже этого уровня, направленный выходной сигнал не выдается, и, следовательно, защита направления будет запрещена.
Настройка минимального напряжения предотвращает неправильную работу реле при перегорании предохранителя или срабатывании MCB.
3. Защита направленного тока для производных Замыкания на землю: [67G]По ощущениям Замыкания на землю Нулевая последовательность фаз или поляризация обратной последовательности фаз используется техника.
- Поляризация нулевой последовательности фаз:
Ноль последовательные напряжения доступны, когда PT является PT с ПЯТЬЮ ветвями, который может обеспечить путь нулевой последовательности или программируемый терминал с подключением по схеме Open-Delta. Этот тип соединения обеспечивает поляризующие напряжения нулевой последовательности.
В этом случае Напряжения нулевой последовательности V 0 и токи нулевой последовательности I 0 используются для поляризации.
- Поляризация обратной последовательности фаз:
При двух фазный (фаза к фазе) PT или трехлинейный PT Напряжения нулевой последовательности недоступны. В этом случае напряжения обратной последовательности В 2 и Для поляризации используются токи обратной последовательности I 2 .
 )
) [Это максимальный угол крутящего момента]
[Это максимальный угол крутящего момента]