Синхронный реактивный двигатель
Дмитрий Левкин
- Конструкция
- Принцип работы
- Особенности
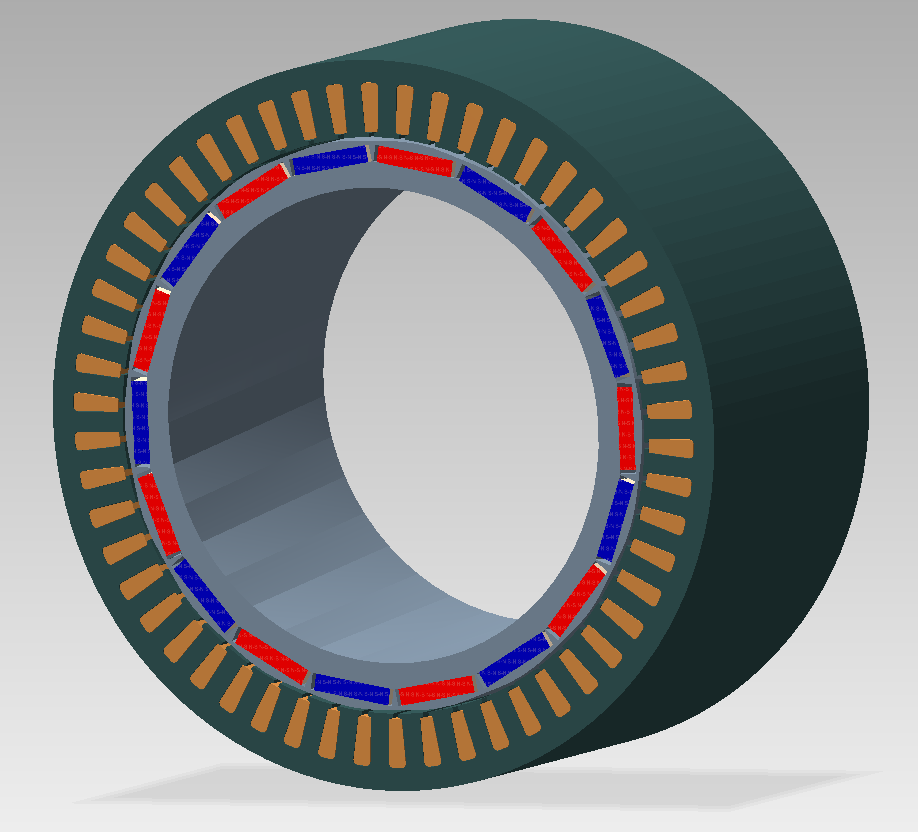
Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.
Синхронный реактивный двигатель
Статор синхронного реактивного электродвигателя с распределенной обмоткой
Выделяют три основных типа ротора реактивного двигателя: ротор с явновыраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
Ротор с явновыраженными полюсами
Аксиально-расслоенный ротор
Поперечно-расслоенный ротор
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи.
Линии магнитного поля синхронного реактивного электродвигателя
Главная идея может быть объяснена с помощью рисунка представленного ниже. Объект «a» состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту «a», создает вращающий момент если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «a» не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле
Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q (). Если угол сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
Ток статора отвечает за намагничивание и за создание момента, который пытается уменьшить искаженность поля. Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.
- Преимущества:
- Простая и надежная конструкция ротора:
ротор имеет простую конструкцию, состоящую из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки. - Низкий нагрев:
так как в роторе отсутствуют токи, он не нагревается во время работы, увеличивая срок службы электродвигателя.
- Нет магнитов:
снижается конечная цена электродвигателя, так как при производстве не используются редко земельные металлы. При отсутствии магнитных сил упрощается содержание и техническое обслуживание электродвигателя. - Низкий момент инерции ротора:
так как на роторе отсутствует обмотка и магниты, момент инерции ротора ниже, что позволяет электродвигателю быстрее набирать обороты и экономить электроэнергию. - Возможность регулирования скорости:
в виду того, что синхронный реактивный электродвигатель для своей работы требует частотный преобразователь, имеется возможность управления скоростью вращения реактивного двигателя в широком диапазоне скоростей.

- Недостатки:
- Частотное управление:
для работы требуется частотный преобразователь. - Низкий коэффициент мощности:
из-за того, что магнитный поток создается только за счет реактивного тока.

Смотрите также
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Библиографический список
Синхронные реактивные двигатели
Синхронный реактивный электродвигатель — синхронный электродвигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов.
Принцип работы синхронного реактивного двигателя
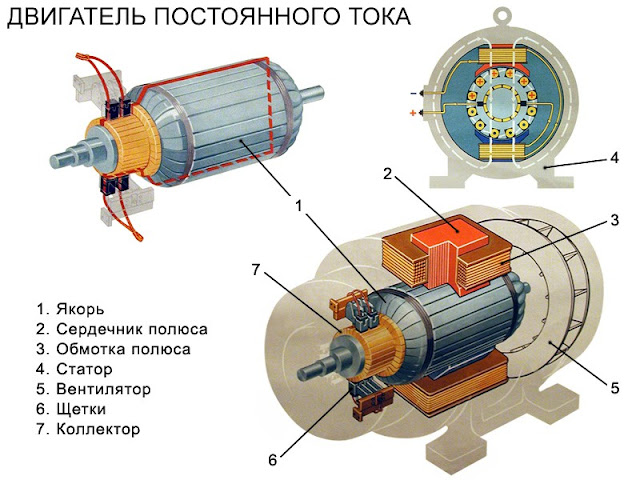
В синхронных реактивных электродвигателях принцип создания момента вращения ротора несколько отличается от асинхронных и традиционных синхронных двигателей. Здесь решающая роль отводится самому сердечнику ротора.
Ротор реактивного синхронного двигателя не имеет обмоток, даже короткозамкнутой обмотки на нем нет. Вместо этого сердечник ротора сделан сильно неоднородным по магнитной проводимости: магнитная проводимость вдоль ротора отличается от магнитной проводимости поперек. Благодаря такому необычному подходу отпадает необходимость как в обмотках ротора, так и в постоянных магнитах на нем.
Что касается статора, то обмотка статора реактивного синхронного двигателя может быть сосредоточенной либо распределенной, при этом сердечник статора и корпус остаются обычными. Вся особенность — в сильно неоднородном сердечнике ротора.
Для реактивных синхронных двигателей характерны три основных типа роторов: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор.
Физика процесса следующая. Переменный ток подается на обмотки статора, и создает вокруг ротора вращающееся магнитное поле, которое максимально в воздушном зазоре между статором и ротором. Момент вращения получается благодаря тому, что ротор все время пытается повернуться так, чтобы магнитное сопротивление для формируемого статором магнитного потока оказалось бы минимальным.
Максимальный момент вращения оказывается прямо пропорциональным разнице между продольной и поперечной индуктивностями, и чем больше эта разница, тем большим получается вращающий момент ротора.
Для понимания данного принципа обратимся к рисунку. Анизотропный объект 1 обладает различной магнитной проводимостью по осям a и b. При этом изотропный объект 2 обладает одинаковой магнитной проводимостью по всем направлениям. Приложенное к объекту 1 магнитное поле порождает момент вращения когда угол между осью b и линиями магнитной индукции B не равен нулю. Когда неравный нулю угол существует, объект 1 станет искажать приложенное магнитное поле B, и направление искажения будет совпадать с осью a объекта 1.
Синусоидальное магнитное поле, создаваемое в синхронном реактивном двигателе обмоткой статора, вращается с определенной синхронной угловой частотой, и следовательно всегда будет иметь место момент вращения, стремящийся вернуть систему в состояние с наименьшим значением полной потенциальной энергии.
То есть момент вращения будет все время стремиться уменьшить искажение магнитного поля статора в направлении оси a, путем уменьшения угла между линиями индукции B и осью b. Так, если управление двигателем направлено на сохранение постоянства этого угла, то и механическая энергия постоянно будет получаться из электромагнитной.
Таким образом, ток обмотки статора обеспечивает намагничивание с существованием вращающего момента, направленного на устранение искаженности поля, и управляя фазой тока в соответствии с положением ротора во вращающейся системе координат (в соответствии со значением угла искажений), получается управление моментом синхронного реактивного электродвигателя.
Синхронные реактивные электродвигатели сегодня
Ведущие мировые производители электродвигателей на сегодняшний день проявляют особый интерес к синхронным реактивным электродвигателям, хотя запатентованы первые версии были еще в конце 19 века. Дело в том, что КПД синхронных реактивных электродвигателей принципиально значительно превышает КПД популярных асинхронных электродвигателей, не говоря уже об удельной мощности.
Потери энергии в роторе отсутствуют, а ведь обычно процентов 30 потерь приходится именно на ротор. Так повышается и срок службы электродвигателя — снижается вредный нагрев. Масса синхронного реактивного электродвигателя и его габариты на 20% меньше чем у асинхронного той же мощности.
Возобновленный интерес к синхронным реактивным электродвигателям в наши дни связан прежде всего с широкими возможностями современного компьютерного моделирования, позволяющими находить наиболее эффективные версии конструкций роторов и статоров — научные исследования получаются более продуктивными, и КПД современных версий синхронных реактивных двигателей уже достигает 98%, в то время как для асинхронных версий КПД традиционно не превышает 90%.
Синхронные реактивные двигатели изготавливают сегодня на базе асинхронных, и при тех же габаритах и установочно-присоединительных размерах получается более высокий КПД, достигается более высокая удельная мощность.
Преимущества и недостатки
Набранный из тонколистовой электротехнической стали, ротор реактивного синхронного двигателя имеет простую и надежную конструкцию без короткозамкнутой обмотки и без магнитов, поэтому в роторе исключены токи вызывающие вредный нагрев, — срок службы повышается, а отсутствие магнитов удешевляет себестоимость продукта, включая до минимума сниженные затраты на техобслуживание.
Благодаря сравнительной легкости ротора, его собственный момент инерции низок, поэтому двигатель быстрее разгоняется до номинальных оборотов, что приводит к экономии электроэнергии.
Частотный преобразователь в качестве регулятора скорости делает управление двигателем очень гибким в широком диапазоне рабочих скоростей. Что касается недостатков, то он всего один: потребность в преобразователе частоты.
Применение преобразователя частоты с активной коррекцией коэффициента мощности позволяет добиться максимального коэффициента мощности системы, что очень важно на любом современном производстве.
Ранее ЭлектроВести писали, что калифорнийская компания HyPoint утверждает, что ее новая конструкция топливного элемента с турбонаддувом позволяет в три раза увеличить мощность и в четыре раза срок службы обычного топливного элемента, открывая возможность создания высокоскоростных дальнемагистральных электрических самолетов VTOL с водородным двигателем. Плотность энергии новой системы в 3 раза выше, чем у литий-ионных аккумуляторов.
По материалам: electrik.info.
В НИПТИЭМ разработаны современные синхронно-реактивные электродвигатели
В НИПТИЭМ разработаны современные синхронно-реактивные электродвигатели
Во владимирском ПАО «НИПТИЭМ» созданы синхронно-реактивные электродвигатели, не имеющие аналогов в России. Большая научно-исследовательская работа, проведенная сотрудниками института, завершилась созданием методики проектирования для таких электрических машин (их еще называют синхронными электродвигателями с анизотропной магнитной проводимостью ротора), а также изготовлением действующих образцов.
Большая научно-исследовательская работа, проведенная сотрудниками института, завершилась созданием методики проектирования для таких электрических машин (их еще называют синхронными электродвигателями с анизотропной магнитной проводимостью ротора), а также изготовлением действующих образцов.
Вслед за мировыми лидерами электротехники — компаниями ABB и KSB — НИПТИЭМ, входящий в состав российского электротехнического концерна «Русэлпром», готов приступить к расширению линейки типоразмеров новых двигателей (от пяти уже разработанных до трех десятков возможных) и продолжает совершенствовать их технические характеристики.
Как отметил один из разработчиков, ведущий научный сотрудник ПАО «НИПТИЭМ» Алексей Захаров, интерес к синхронно-реактивным электрическим машинам вызван, прежде всего, их более высокими, чем у классических асинхронных двигателей, показателями — коэффициентом полезного действия, удельной мощностью.
Ротор такой машины не имеет ни обмотки, ни магнитов и выполнен из листов специальной формы, что значительно упрощает конструкцию.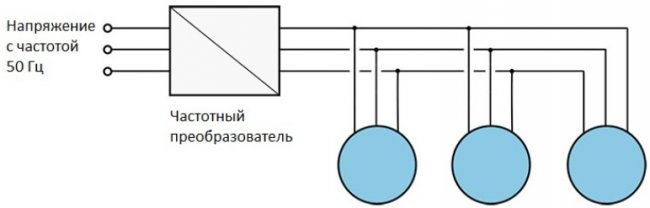
Предшественниками сегодняшней новации являются синхронно-реактивные двигатели, впервые запатентованные в конце XIX — начале XX веков. Вторая волна интереса к таким электрическим машинам поднялась на рубеже нового тысячелетия. НИПТИЭМ начал проводить научные исследования и разработки в этом направлении одним из первых в стране.
Синхронные реактивные двигатели (СРД)
Синхронные реактивные двигатели (СРД) изготавливаются на базе асинхронных электродвигателей, в тех же габаритах и с теми же установочно-присоединительными размерами. По сравнению с асинхронными электродвигателями, СРД имеют более высокий КПД. СРД оснащаются датчиком положения ротора для работы с преобразователем частоты. По требованию заказчика, для возможности прямого пуска от сети, СРД может быть оснащен пусковой обмоткой. СРД могут успешно применяться для механизмов, имеющих вентиляторный тип нагрузки, например, для привода вентиляторов, насосов и компрессоров и т.д., где не требуется высокий пусковой момент.
По сравнению с асинхронными электродвигателями, СРД имеют более высокий КПД. СРД оснащаются датчиком положения ротора для работы с преобразователем частоты. По требованию заказчика, для возможности прямого пуска от сети, СРД может быть оснащен пусковой обмоткой. СРД могут успешно применяться для механизмов, имеющих вентиляторный тип нагрузки, например, для привода вентиляторов, насосов и компрессоров и т.д., где не требуется высокий пусковой момент.
Обозначение:
СРД ААА / В
СРД – синхронный реактивный двигатель;
ААА — высота оси вращения, мм;
В — число пар полюсов (2р).
| Обозначение | Номин. мощность, кВт | Номин. частота вращения, мин-1 | КПД, % | Коэфф. мощности |
Номин. ток, А ток, А
|
Номин. момент, Н*м | Отношение максим. момента к номин. | Отношение пускового момента к номин. | Линейное напряжение питания, В |
|---|---|---|---|---|---|---|---|---|---|
| СРД160/6 | 18,5 | 1000 | 92 | 0,74 | 37 | 177 | 1.5* | 400 | |
| СРД315/6 | 110 | 1000 | 98 | 0,72 | 265 | 1050 | 2 | 1.5* | 400 |
| СРД540/6 | 500 | 1000 | 97 | 0,85 | 495 | 4775 | 2 |
1. 5* 5*
|
800 |
Примечание: * — для двигателей с пусковой обмоткой при пуске от сети.
По требованию заказчика могут быть изготовлены СРД габаритов высоты оси вращения от 160 мм до 315 мм включительно с числом пар полюсов 2р= 4, 6 с частотой вращения 3000 мин-1, 1500 мин-1, 1000 мин-1.
Высокая эффективность этих двигателей позволяет изготавливать их на ступень выше по мощности или более высоким КПД по сравнению с асинхронными электродвигателями.
Дополнительную информацию можно получить по телефону +7 (4922) 33-13-37.
Синхронные реактивные двигатели — Двигатели ABB Process Performance (Руководства по низковольтным двигателям IEC и двигателям ABB)
Синхронные реактивные двигатели (SynRM) в последние годы стали коммерчески жизнеспособными в качестве высокоэффективной альтернативы асинхронным двигателям. Основная идея двигателя SynRM заключается в том, что у ротора нет обмоток или магнитов, а только пластины из электротехнической стали, сложенные вместе, чтобы сформировать пакет ротора. В отличие от асинхронного двигателя, ротор SynRM не имеет индуктивного тока и, следовательно, потерь. Это делает SynRM идеальным сочетанием простоты и эффективности.
В отличие от асинхронного двигателя, ротор SynRM не имеет индуктивного тока и, следовательно, потерь. Это делает SynRM идеальным сочетанием простоты и эффективности.
Основные преимущества синхронных реактивных двигателей
Синхронные реактивные двигатели ABB являются ответом на глобальные мегатенденции. Изменение климата и экологическая ответственность вызывают огромные изменения во всех отраслях.
- Уменьшите воздействие на окружающую среду, используя меньше электроэнергии и сократив выбросы CO 2 .
- Повысьте устойчивость, соблюдая текущие и будущие стандарты эффективности, а также повышая эффективность и производительность.
- Повысьте свою надежность и обеспечьте наиболее устойчивую и долговечную работу за счет сведения к минимуму отказов двигателей и времени простоя.
- Повысьте качество своего производства за счет точного контроля крутящего момента и скорости
- Модернизируйте свои модификации, заменив стандартные асинхронные двигатели в любом промышленном применении
Основные моменты
Дело клиента 09-2022
Veisto Oy разработала более энергоэффективную силовую установку с помощью технологии ABB SynRM.
Компания Veisto Oy, производитель пилорам и станков, поставила высокоскоростную пилораму на лесопилку Раума. Компания Rauma впервые представила новую, более энергоэффективную гидравлическую силовую установку, состоящую из шестеренчатого насоса с регулированием скорости, двигателя SynRM и преобразователя частоты.
Пресс-релиз 09-2022
Глобальная компания по производству удобрений повышает энергоэффективность с помощью двигателей и приводов ABB
Yara модернизирует одну из своих крупнейших международных производственных площадок с помощью высокоэффективных технологий. Было модернизировано около 1000 двигателей, а на втором этапе примерно 2500 двигателей будут заменены синхронными реактивными двигателями и приводами IE5.
Веб-история 06-2022
Синхронные реактивные двигатели и приводы АББ позволяют снизить выбросы углерода при повышении энергоэффективности здания в центральном деловом районе Хобарта.
Модернизация оборудования позволила сократить ежегодные выбросы CO2 на 5,1 тонны. Управляющие недвижимостью значительно снизили эксплуатационные расходы и счета за электроэнергию.
Веб-история 05-2022
Подсластить мир за счет энергоэффективности
В энергоемких процессах, таких как переработка сахара, использование новейших технологий является верным способом снижения энергопотребления и затрат при сохранении общей эффективности. В Бельгии один из заводов Südzucker сделал шаг к более устойчивому будущему.
Артикул 03-2022
Системы ОВКВ могут сократить энергопотребление за счет перехода на высокоэффективные двигатели IE5 SynRM.
Теро Хелпио объясняет, как синхронные реактивные двигатели IE5 и приводы с регулируемой скоростью могут повысить энергоэффективность систем отопления, вентиляции и кондиционирования воздуха (HVAC), чтобы помочь нашим городам достичь своих целей в области устойчивого развития.
Статья 3-2022
Комплекты двигателей и приводов IE5 SynRM помогают решить проблемы энергоэффективности
Джеймс Чалмерс объясняет, как использование частотно-регулируемых приводов (VSD) для управления электрическими насосами и двигателями может стать экологически безопасным решением для водного хозяйства. Для достижения еще лучших результатов сочетание привода с новейшей технологией двигателя IE5 SynRM выводит энергоэффективность на новый уровень.
Интервью 1-2022
Инженер говорит: обеспечение устойчивого промышленного будущего
В этом интервью редактор журнала The Engineer Джон Экселл беседует с Джорисом Коквитом, руководителем отдела продаж низковольтных двигателей IEC, об энергоэффективности в промышленности и о том, как инновационный двигатель SynRM и пакет VSD от ABB могут помочь.
Дело клиента 12-2021
Технология ABB позволяет Hobart Aquatic Center сэкономить около 36 000 долларов за счет снижения затрат на электроэнергию.
Новое, более энергоэффективное решение включает в себя двигатели, приводы и интеллектуальные датчики ABB.
Для цифровой, расширенной аналитики и масштабируемой системы, которая также снизит текущее потребление электроэнергии примерно на 18%.
Дело клиента 12-2021
Двигатели IE5 помогают покрасочному цеху добиться годовой экономии энергии
Модернизация двигателей с истекшим сроком эксплуатации до высокоэффективных двигателей и приводов класса IE5 в покрасочном цеху MINI BMW Group в Оксфорде, Великобритания, привела к значительной экономии энергии.
Дело клиента 11-2021
Сила шоколада
Разработчики SACMI Packaging & Chocolate использовали синхронные реактивные двигатели ABB IE5 (SynRM) в сочетании с оптимальным приводом ABB, что является идеальным решением для процесса конширования, когда продукт обрабатывается в течение нескольких часов.
Инженер 11-2021
Путь питания приводов и двигателей к Net Zero
Использование приводов с регулируемой скоростью (VSD) для управления промышленными электродвигателями может стать экологически безопасным решением, которое изменит правила игры, как объясняет Арнольд Таддео, глобальный руководитель отдела управления приводной продукцией компании ABB Motion. Все становится еще лучше, когда привод работает в паре с новейшей технологией двигателей IE5 SynRM, что позволяет вывести энергоэффективность на новый уровень.
Дело клиента 10-2021
Пакет SynRM и Drive повышает энергоэффективность в Хузуме
Завод Metsä Board в Хусуме в Швеции представляет собой интегрированный завод по производству картона и целлюлозы. Благодаря двигателям и приводам SynRM от АББ предприятие экономит энергию и деньги в своих энергоемких операциях.
ИЕН Европа
Достижение эффективности IE5 с двигателями без магнитов
В сочетании с приводом с регулируемой скоростью (VSD) синхронный реактивный двигатель (SynRM) с классом энергоэффективности IE5 обеспечивает эффективную комбинацию, которая поможет промышленным компаниям достичь своих целей в области устойчивого развития.
Типы синхронных реактивных двигателей ABB (SynRM)
Двигатели ABB IE5 SynRM обеспечивают новый уровень эффективности: ультра-премиум.
Модернизация двигателя ABB IE5 SynRM позволяет сократить потери энергии на 40 %, сэкономить электроэнергию на 18 тераватт-часов в год и сократить выбросы CO 2 на 6 миллионов тонн в течение срока службы двигателя. Замена всего одного мотора может изменить ситуацию.
- Проверенная эффективность IE5
- Более низкие температуры подшипников и обмотки
- Увеличенный срок службы подшипника
- Повышенная эффективность частичной нагрузки
- Более точное управление процессом
- Характеристики двигателя с постоянными магнитами — без редкоземельных магнитов
- Тип двигателя: M3AL/M3BL
- Мощность: 5,5–315 кВт
- Типоразмеры: IEC 132–315
Высокопроизводительные синхронные реактивные двигатели ABB — это мощные, но очень компактные двигатели, которые на три типоразмера меньше, чем обычные двигатели.
- Больше мощности благодаря меньшему двигателю
- Более низкие температуры подшипников и обмотки
- Увеличенный срок службы подшипника
- Уровень экономической эффективности и удобства обслуживания асинхронных двигателей
- Характеристики двигателя с постоянными магнитами — без магнитов
- Тип двигателя: M3AL/M3BL
- Мощность: 1,1–350 кВт
- Типоразмеры: IEC 90–315
Ссылки по теме
Двигатели и генераторы
Двигатели ABB Process Performance
Цифровая трансмиссия
Энергоэффективность
Присоединяйтесь к движению за энергоэффективность!
Экодизайн двигателей и приводов
Энергоэффективность — двигатели и генераторы
Новости и истории успеха
Дело клиента 04-2021
Комплекты двигателей и приводов IE5 SynRM явно повышают энергоэффективность при очистке сточных вод.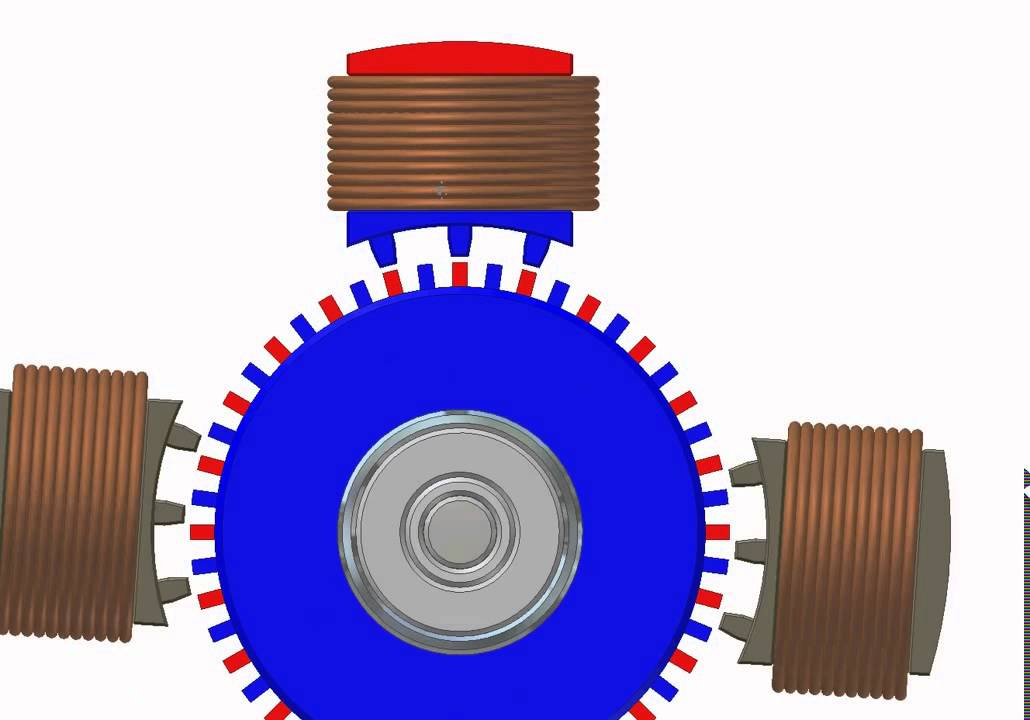
На очистных сооружениях в городе Бохольт, Германия, предотвращение изменения климата и повышение энергоэффективности являются двумя наиболее важными задачами.
Дело клиента, август 2018 г.
Viking Line, Хельсинки, Финляндия
Плавное движение от начала до конца благодаря технологии ABB SynRM
Узнать больше
Дело клиента, ноябрь 2016 г.
Праймпак, Северная Ирландия
Производитель пластиковых контейнеров отмечает снижение затрат на электроэнергию на 60% и повышение производительности на 30% благодаря моторному приводу ABB SynRM
Узнать больше
Веб-история 11-2020
Двигатели ABB IE5 SynRM отмечены знаком Efficient Solution Label
Двигатели IE5 SynRM обеспечивают высочайшую эффективность, снижая энергопотребление и выбросы углекислого газа. В знак признания их экологических преимуществ они были награждены Знаком эффективного решения фонда Solar Impulse.
В знак признания их экологических преимуществ они были награждены Знаком эффективного решения фонда Solar Impulse.
Дело клиента, декабрь 2016 г.
Evides Waterbedrijf, Нидерланды
Компания Evides Waterbedrijf впервые применила технологию энергосберегающего электропривода SynRM (VFD) компании АББ в Нидерландах.
Узнать больше
Дело клиента, март 2016 г.
Радиус Системс, Великобритания
Новая моторная технология SynRM обеспечивает меньшее энергопотребление, техническое обслуживание и низкий уровень шума в экструдере.
Узнать больше
Внешний артикул
Почему вам следует перейти на сверхвысокий КПД двигателя IE5
Модернизация до пакета, который сочетает в себе синхронный реактивный двигатель (SynRM) с классом эффективности IE5 ультра-премиум и привод с переменной скоростью (VSD), не только экономит энергию и затраты на техническое обслуживание, но повышает производительность и отвечает требованиям устойчивого развития — Tero Helpio поясняет ABB Motion.
Внешний артикул
Viking Line снимает напряжение с швартовки в гавани теплохода Gabriella
Система швартовки, оснащенная технологией ABB, обеспечивает пассажирам плавный и плавный круиз.
Пресс-релиз 03-2020
Двигатели ABB IE5 SynRM обеспечивают высочайшую энергоэффективность
Отмеченные наградами двигатели SynRM компании АББ представляют собой новый первый выбор для удовлетворения растущего глобального спроса на повышение энергоэффективности.
Внешний артикул
IE5 и выше
Энергоэффективность — это святой Грааль автомобильного рынка, и производители выпускают ряд моделей, соответствующих стандарту IE5+, для достижения этой цели.
ABB Conversations, 3 февраля 2015 г.
Четыре момента, которые следует учитывать при выборе приводов для двигателей SynRM
Одной из замечательных особенностей привода для более энергоэффективных двигателей и приводных решений является растущее использование синхронных реактивных двигателей (SynRM).
Читать сообщение в блоге
История энергоэффективности 05-2021
Энергоэффективность – актуальная проблема
Энергоэффективность становится горячей темой в цепочке поставок, как объясняет Микаэль Карлссон из AP&T. Прочитайте, как они используют двигатели SynRM.
Артикул
Почему Нежелание?
Дейв Хоули, генеральный менеджер по двигателям и генераторам, ABB, исследует пять мифов, окружающих эту технологию.
ABB Conversations, август 2017 г.
5 вещей, которые следует учитывать при выборе двигателя и привода для швартовной лебедки
Выбор наиболее подходящей комбинации двигателя и привода для швартовной лебедки может оказаться непростой задачей.
Читать сообщение в блоге
ABB Conversations, 11 марта 2016 г.
SynRM меняет представление о постоянном крутящем моменте в экструдерах
SynRM обеспечивает улучшение энергопотребления на 8-15 процентов
Читать сообщение в блоге
Статья с белой бумагой, 04-2021
5 вещей, которые нужно знать о двигателях IE5 SynRM
Синхронные реактивные двигатели (SynRM) быстро становятся предпочтительной технологией для достижения эффективности IE5. Узнайте, как бесмагнитные двигатели и приводы с регулируемой скоростью меняют ситуацию.
Узнайте, как бесмагнитные двигатели и приводы с регулируемой скоростью меняют ситуацию.
Артикул
6 причин выбрать SynRM
Синхронный реактивный двигатель (SynRM) существует уже почти столетие, но только в последние годы он стал коммерчески жизнеспособным в качестве высокоэффективной альтернативы асинхронному двигателю. Дэйв Хоули из ABB объясняет некоторые преимущества.
Статья 08-2017
Производство сегодня // Выпуск 141:
Сохранение энергии
ABB Conversations, 11 марта 2015 г.
SynRM и запуск с хода, может ли ваш привод этим управлять?
Пуск с хода имеет решающее значение для многих современных отлаженных процессов. Не все преобразователи частоты одинаково реагируют на управление синхронными (SynRM) реактивными двигателями.
Не все преобразователи частоты одинаково реагируют на управление синхронными (SynRM) реактивными двигателями.
Читать сообщение в блоге
Внешний артикул
Двигатели ABB SynRM без редкоземельных магнитов обеспечивают сверхвысокую энергоэффективность
Это новая версия синхронных реактивных двигателей АББ. Разработаны на асинхронной платформе, а не на редкоземельных магнитах, и соответствуют новому ультрапремиальному классу энергоэффективности IE5, определенному IEC.
Будущее энергетики
Инновации АББ в области устойчивой энергетики признаны ВЭФ
В недавнем отчете Всемирного экономического форума (ВЭФ) освещаются прорывные инновации за последнее десятилетие, которые принесли пользу обществу и способствовали ускорению энергетического перехода.
ABB Conversations, 12 января 2017 г.
Повышение энергоэффективности в водном бизнесе
Водохозяйственная отрасль находит инновационные способы обеспечения непрерывного снабжения водой по требованию энергоэффективным и устойчивым образом.
Читать сообщение в блоге
ABB Conversations, 11 марта 2015 г.
Зона частичной нагрузки и SynRM — идеальное сочетание.
Многие процессы не требуют полной мощности электродвигателя. Они работают в областях ниже полной мощности, в области, которую я люблю называть зоной частичной нагрузки.
Читать сообщение в блоге
Видео
Ведущие технологии с низковольтными двигателями IEC от АББ
Повышение эффективности всех двигателей может оказать существенное влияние на снижение энергопотребления и общих эксплуатационных расходов, поэтому мы постоянно внедряем инновации для повышения эффективности, сокращения энергопотребления и выбросов.
Мультимедиа
Секреты технологии
Каждый комплект синхронного реактивного электропривода сочетает в себе проверенную технологию статора, инновационную конструкцию ротора без магнитов, лучший в своем классе промышленный привод и передовое программное обеспечение, предлагая комплексное оптимизированное решение.
Тизер видео
Начните экономить с двигателями IE5 SynRM от ABB
Выберите двигатель ABB IE5 SynRM для повышения эффективности, надежности, гибкости и управляемости.
Видео
Начните экономить энергию с двигателями ABB IE5 SynRM
Синхронные реактивные электродвигатели АББ класса IE5 отличаются высокой надежностью и высочайшей эффективностью и позволяют экономить энергию, сокращать счета за электроэнергию и сокращать выбросы в широком диапазоне областей применения. Они являются заменой асинхронным двигателям, а срок окупаемости часто составляет менее одного года.
Они являются заменой асинхронным двигателям, а срок окупаемости часто составляет менее одного года.
Мультимедиа
Началась новая эра
Возьмите лучшее из обоих миров. Преимущества технологии постоянного магнита в сочетании с простотой и удобством обслуживания индукционной платформы.
Все о реактивных двигателях — что это такое и как они работают
Электродвигатели создают механическое движение, используя электромагнетизм и основные электрические принципы, и сегодня они составляют подавляющее большинство коммерческих двигателей. Существует так много различных типов электродвигателей, что может быть трудно определить, какой из них подходит для вашего применения.
Эта статья призвана помочь читателям понять устройство электродвигателя путем изучения его конструкции и работы; Эти машины могут быть разделены на двигатели постоянного и переменного тока в зависимости от источника питания и могут быть дополнительно классифицированы в зависимости от их метода выработки механической энергии. В этой статье основное внимание будет уделено конкретному классу двигателей, известному как реактивные двигатели, которые могут относиться к любой из этих категорий в зависимости от конструкции. Мы обсудим этот усовершенствованный двигатель и его рабочие характеристики, чтобы увидеть, как определенные электромагнитные принципы, а именно сопротивление, индукция и переключение, используются для создания вращательной энергии.
В этой статье основное внимание будет уделено конкретному классу двигателей, известному как реактивные двигатели, которые могут относиться к любой из этих категорий в зависимости от конструкции. Мы обсудим этот усовершенствованный двигатель и его рабочие характеристики, чтобы увидеть, как определенные электромагнитные принципы, а именно сопротивление, индукция и переключение, используются для создания вращательной энергии.
Что такое реактивные двигатели?
Хотя реактивные двигатели были изобретены в начале 19 века, они только недавно получили распространение благодаря микроэлектронике и передовым системам управления.
Реактивный двигатель — это усовершенствованный тип двигателя, в котором используются как статоры, так и роторы, как и в большинстве электрических двигателей. Некоторые реактивные двигатели работают с точными оборотами, синхронизируя скорость ротора с вращающимся магнитным полем (RMF) статора, что делает их «синхронными» по конструкции (более подробную информацию об этом можно найти в нашей статье о синхронных двигателях). Их называют реактивными двигателями, потому что они поляризуют величину сопротивления — магнитного эквивалента электрического сопротивления — в полюсах своего ротора для взаимодействия с RMF статора. Подтипы реактивных двигателей включают синхронные реактивные двигатели и вентильные реактивные двигатели, и каждый из них использует реактивное сопротивление уникальным образом.
Их называют реактивными двигателями, потому что они поляризуют величину сопротивления — магнитного эквивалента электрического сопротивления — в полюсах своего ротора для взаимодействия с RMF статора. Подтипы реактивных двигателей включают синхронные реактивные двигатели и вентильные реактивные двигатели, и каждый из них использует реактивное сопротивление уникальным образом.
Как работают реактивные двигатели?
Двумя основными компонентами реактивного двигателя являются внешний неподвижный статор и внутренний ротор, разделенные небольшим воздушным зазором. В зависимости от типа реактивного двигателя конструкция этих двух частей меняется, но основные принципы работы остаются прежними.
Статор состоит из выступающих «выступающих» пар полюсов, образованных протеканием тока по проводу, намотанному на эти выступы. Ротор изготовлен из ферромагнитного металла и содержит собственные полюса, повторяющие контуры магнитного поля статора (либо с выступами, либо с воздушными зазорами/выемками). Когда выступающий полюс ротора совпадает с выступающим полюсом статора, говорят, что ротор находится в положении минимального магнитного сопротивления, то есть величина магнитного «сопротивления» в этой точке наименьшая и «полностью выровнена». Когда полюс статора совпадает с выемками/барьерами/пазами ротора, говорят, что ротор находится в положении максимального сопротивления или «полностью не выровнен». Из-за сохранения энергии ротор всегда будет перемещаться в положение наименьшего сопротивления, и поэтому возникает «нежелательный» крутящий момент, когда ротор полностью не выровнен. Этот крутящий момент притянет ротор к ближайшему выступающему полюсу статора и вызовет вращение. При правильном расчете времени с использованием оборудования систем управления или определенной геометрии ротора этот эффект может создавать непрерывный вращательный выходной сигнал.
Когда выступающий полюс ротора совпадает с выступающим полюсом статора, говорят, что ротор находится в положении минимального магнитного сопротивления, то есть величина магнитного «сопротивления» в этой точке наименьшая и «полностью выровнена». Когда полюс статора совпадает с выемками/барьерами/пазами ротора, говорят, что ротор находится в положении максимального сопротивления или «полностью не выровнен». Из-за сохранения энергии ротор всегда будет перемещаться в положение наименьшего сопротивления, и поэтому возникает «нежелательный» крутящий момент, когда ротор полностью не выровнен. Этот крутящий момент притянет ротор к ближайшему выступающему полюсу статора и вызовет вращение. При правильном расчете времени с использованием оборудования систем управления или определенной геометрии ротора этот эффект может создавать непрерывный вращательный выходной сигнал.
Существуют определенные показатели, общие для всех реактивных двигателей, и в этой статье мы кратко объясним каждый из них, чтобы помочь понять различия между типами реактивных двигателей. Они ни в коем случае не являются исчерпывающими и содержат только основные характеристики реактивных двигателей.
Они ни в коем случае не являются исчерпывающими и содержат только основные характеристики реактивных двигателей.
Тип фазы
Реактивные двигатели могут приводиться в действие однофазным или многофазным двигателем. Наиболее распространенными многофазными конструкциями являются трехфазные двигатели, которые зарезервированы для приложений с более высоким крутящим моментом, поскольку они не требуют вспомогательных обмоток и могут обеспечивать больший ток для двигателя. Для однофазных двигателей требуются пускатели, и дополнительную информацию можно найти в нашей статье о пускателях двигателей.
Соотношение полюсов статора и ротора
Существуют идеальные соотношения полюсов статора и ротора в зависимости от типа двигателя/желаемых выходных характеристик. Реактивные двигатели обычно имеют соотношение полюсов 6/4, 4/2, 8/6 или 12/8, хотя существуют и другие соотношения. Соотношение 1/1 лучше всего подходит для синхронных реактивных двигателей, поскольку оно обеспечивает более точную синхронизацию.
Номинальная мощность/крутящий момент
Номинальный выходной крутящий момент [с единицами ньютон-метров (Нм) или фунт-сила — футы (lbf-ft)] и мощность [с единицами измерения киловатты (кВт) или лошадиные силы (л.с.)] отображает количество выходной мощности и крутящий момент, обеспечиваемый двигателем в установившемся режиме. Номинальная мощность может варьироваться от долей лошадиных сил до сотен лошадиных сил, что показывает, насколько универсальными могут быть эти двигатели.
Пульсации крутящего момента и диапазон скоростей постоянного крутящего момента
Поскольку есть точки, в которых реактивный крутящий момент не создается (полностью выровненные положения), при вращении вала возникает периодическое изменение крутящего момента. Это может вызвать эффект «пульсации крутящего момента», когда вал испытывает крутящий момент только в этих положениях с высоким сопротивлением. Эта пульсация крутящего момента может вызвать шум и нежелательные колебания в машине. Поэтому существуют диапазоны постоянного крутящего момента для реактивных двигателей, в которых эта пульсация крутящего момента минимальна, обычно оценивается как диапазон оборотов в минуту.
Поэтому существуют диапазоны постоянного крутящего момента для реактивных двигателей, в которых эта пульсация крутящего момента минимальна, обычно оценивается как диапазон оборотов в минуту.
Типы реактивных двигателей
Есть две основные конструкции, в которых используется реактивный двигатель: синхронный реактивный двигатель и вентильный реактивный двигатель. Каждая из этих конструкций достаточно различна, чтобы требовать отдельных объяснений, и в этом разделе будет кратко описан каждый подтип реактивного двигателя.
Синхронные реактивные двигатели
Синхронные реактивные двигатели предназначены для работы с точными «синхронными» скоростями. Они достигают этого за счет использования трехфазной обмотки статора (создающей истинное RMF) и ротора, в котором реализованы явно выраженные полюса ротора и внутренние барьеры магнитного потока (обычно пазы или воздушные зазоры внутри ротора, см. Рисунок 1). В роторе часто используется модифицированная короткозамкнутая клетка вокруг этих выступающих полюсов, так что он может извлечь выгоду из эффекта индукции и стать самозапускающимся (дополнительную информацию об этой концепции можно найти в нашей статье о двигателях с короткозамкнутым ротором). Когда двигатель запускается, он приближается к синхронной скорости за счет индукции, а затем фиксируется в синхронизме за счет реактивного момента, создаваемого магнитными барьерами ротора.
Когда двигатель запускается, он приближается к синхронной скорости за счет индукции, а затем фиксируется в синхронизме за счет реактивного момента, создаваемого магнитными барьерами ротора.
Рис. 1: Типовые конструкции синхронных реактивных двигателей. Обратите внимание на участки с низким сопротивлением (полюса) и высоким сопротивлением (воздушные зазоры/выемки)
Изображение предоставлено: http://www.faculty.umassd.edu/xtras/catls/resources/binarydoc/3624.ppt
Импульсные реактивные двигатели
Импульсные реактивные двигатели относятся к типу шаговых двигателей, но они уникальны тем, что имеют перевернутую обмотку, где обмотки возбуждения находятся в статоре, а не в роторе (см. рис. 2). Ротор представляет собой ферромагнитный сердечник с постоянными полюсами и выемками, на которые действуют электромагнитные полюса статора. Хотя это упрощает физическую конструкцию, это усложняет электрическую настройку, поскольку электронная система управления должна включать и выключать полюса статора, чтобы «приводить» полюса ротора в каждое новое положение, вызывая вращение. Реактивный реактивный двигатель может использовать электронный датчик положения, который вычисляет угол между полюсами ротора и обмотками статора, а также синхронизирующий механизм для синхронизации полюсов статора с частотой вращения. В этих двигателях используются достижения в области полупроводников и микроэлектроники 21 века, и они до сих пор оптимизированы для самых разных применений.
Реактивный реактивный двигатель может использовать электронный датчик положения, который вычисляет угол между полюсами ротора и обмотками статора, а также синхронизирующий механизм для синхронизации полюсов статора с частотой вращения. В этих двигателях используются достижения в области полупроводников и микроэлектроники 21 века, и они до сих пор оптимизированы для самых разных применений.
Рис. 2: Типовая конструкция вентильного реактивного двигателя. Обратите внимание на неравное соотношение полюсов ротора и статора и катушки, окружающие выступающие полюса статора.
Изображение предоставлено: https://en.wikipedia.org
Применение и критерии выбора
В зависимости от типа реактивного двигателя их применение может различаться; тем не менее, эти двигатели нашли несколько общих применений, которые отличают их от других электродвигателей, и они быстро опережают своих старых собратьев.
Их первое главное преимущество — простая конструкция — в них не используются токосъемные кольца, обмотки возбуждения ротора, постоянные магниты, коммутаторы или щетки. Эта простота повышает их эффективность, надежность, производственные затраты, затраты на техническое обслуживание и делает их элегантным вариантом для дизайнеров.
Они обеспечивают очень высокую удельную мощность при небольшом размере; Фактически, реактивные двигатели могут обеспечить пусковой момент в 2-4 раза больший, чем у традиционных асинхронных машин того же размера, что позволяет им быть на 1-2 рамы меньше при той же выходной мощности. Их можно использовать в ситуациях, требующих от 0 до сотен тысяч оборотов в минуту, при условии, что они ограничены только входным током и их подшипниками.
Эти преимущества являются палкой о двух концах, поскольку простая конструкция сочетается со сложными электрическими схемами и системами управления. Реактивные двигатели по своей природе привязаны к своей электронике, поэтому эти схемы необходимо покупать вместе с этими двигателями и устанавливать, что может увеличить затраты. Их отношение тока к крутящему моменту чрезвычайно нелинейно и должно решаться с помощью конструкции их системы управления. Переключение явно выраженных полюсов в вентильных реактивных двигателях должно быть точным, иначе двигатель не будет работать. Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
Их отношение тока к крутящему моменту чрезвычайно нелинейно и должно решаться с помощью конструкции их системы управления. Переключение явно выраженных полюсов в вентильных реактивных двигателях должно быть точным, иначе двигатель не будет работать. Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
В настоящее время эти двигатели наиболее эффективны на высоких скоростях и нашли широкое применение в стиральных машинах, аналоговых электросчетчиках, приводах управляющих стержней для ядерных реакторов, двигателях с жесткими дисками, электромобилях, приводах стеклоочистителей, записывающем оборудовании и многом другом. более. Они все еще оптимизируются сегодня и могут однажды заменить асинхронный двигатель в качестве отраслевого стандарта благодаря своим благоприятным характеристикам.
Резюме
В этой статье представлено понимание того, что такое реактивные двигатели и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- https://rmd.ac.in/dept/eee/notes/7/SEM/unit1.pdf
- http://lipo.ece.wisc.edu
- http://www.refreedrive.eu
- https://people.ucalgary.ca
- http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.662.959&rep=rep1&type=pdf
- http://people.ece.umn.edu/users/riaz/animations/switchrel.html
Другие товары для двигателей
- Все о бесщеточных двигателях постоянного тока — что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают Шаговые двигатели
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают Синхронные двигатели
- и асинхронные двигатели — в чем разница? Бесщеточные двигатели
- и щеточные двигатели — в чем разница?
- Кто изобрел паровой двигатель? Урок промышленной истории
- Все о двигателях с электронным управлением — что это такое и как они работают Двигатели постоянного тока
- и серводвигатели — в чем разница? Шаговые двигатели
- и двигатели постоянного тока — в чем разница?
- Все о контроллерах серводвигателей — что это такое и как они работают
- Что такое трехфазный двигатель и как он работает?
- ECM Motors и PSC Motors — в чем разница?
- Все о устройствах плавного пуска двигателей: что это такое и как они работают
- Все о контроллерах двигателей постоянного тока — что это такое и как они работают
- Основы тестирования двигателя (и ротора)
- Что такое штамповка двигателя и как это работает?
- Все о двигателях с дробной мощностью
Больше из Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Синхронный реактивный двигатель: работа, преимущества и применение
Синхронный реактивный двигатель представляет собой электромеханическое устройство преобразования энергии, которое преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока, который работает по закону силы Лоренца, синхронный реактивный двигатель работает по принципу переменного сопротивления. Основная характеристика этого двигателя заключается в том, что он работает на синхронной скорости. Благодаря магнитному запиранию он следует синхронной скорости вращающегося магнитного поля, которое формируется
В отличие от двигателя постоянного тока, который работает по закону силы Лоренца, синхронный реактивный двигатель работает по принципу переменного сопротивления. Основная характеристика этого двигателя заключается в том, что он работает на синхронной скорости. Благодаря магнитному запиранию он следует синхронной скорости вращающегося магнитного поля, которое формируется
на полюсах статора. Из-за постоянной скорости двигатель имеет меньше применений по сравнению с вентильным реактивным двигателем. Еще одним недостатком этого устройства является невозможность регулирования скорости, так как ротор всегда привязан к магнитному полю статора.
Что такое синхронный реактивный двигатель?
Синхронный реактивный двигатель представляет собой электромеханическое устройство преобразования энергии, которое преобразует электрическую энергию в механическую. Двигатель всегда работает на синхронной скорости из-за магнитной блокировки между магнитным полем ротора и магнитным полем статора. В двигателе постоянного тока крутящий момент создается за счет взаимодействия между магнитными полями статора и ротора, что также известно как закон силы Лоренца.
В двигателе постоянного тока крутящий момент создается за счет взаимодействия между магнитными полями статора и ротора, что также известно как закон силы Лоренца.
Синхронный реактивный двигатель
Синхронный реактивный двигатель работает по принципу реактивного сопротивления. В роторе создается постоянный реактивный момент, который заставляет двигатель работать. Можно отметить, что в реактивном реактивном двигателе создается переменный реактивный момент, который создается из-за коммутационных цепей. Коммутационные цепи создают вращающееся магнитное поле на статоре. Но в синхронных схемах включения не требуется, так как мы не собираемся изменять скорость двигателя.
Принцип синхронного реактивного двигателя
В основе работы этого двигателя лежит принцип реактивного сопротивления. Когда ферромагнитный материал находится под воздействием магнитного поля, магнитные линии проходят через материал, избегая пути снаружи или вокруг материала. Поскольку в окружающей среде присутствует воздух, а воздух имеет высокое сопротивление по сравнению с сопротивлением материалов. Сопротивление эквивалентно сопротивлению в магнитном поле. Как мы знаем, ток всегда старается течь по пути наименьшего сопротивления, точно так же поток магнитных линий, который также называют линиями потока, старается течь по пути наименьшего сопротивления.
Сопротивление эквивалентно сопротивлению в магнитном поле. Как мы знаем, ток всегда старается течь по пути наименьшего сопротивления, точно так же поток магнитных линий, который также называют линиями потока, старается течь по пути наименьшего сопротивления.
Когда статор питается от трехфазной сети, обмотки статора, расположенные по схеме звезда или треугольник, создают вращающееся магнитное поле. Причиной создания вращающегося магнитного поля является теорема о вращающемся магнитном поле, согласно которой всякий раз, когда трехфазная обмотка возбуждается трехфазным источником питания, она создает вращающееся магнитное поле, которое вращается со скоростью синхронной скорость определяется выражением (120*f/P), где f — частота, а P — количество полюсов. Для шестиполюсной машины магнитное поле вращается со скоростью 1000 об/мин.
Вращающееся магнитное поле, когда пересекает воздушный зазор и взаимодействует с обмотками ротора, обмотка ротора имеет тенденцию притягивать магнитное поле статора. Следует отметить, что ротор в основном представляет собой короткозамкнутый ротор, как в асинхронном двигателе. Но тогда как в синхронном двигателе ротор имеет явно выраженный полюс цилиндрической конструкции. Когда обмотка ротора пересекается магнитным полем статора, они также создают вращающееся магнитное поле и, основываясь на принципе сопротивления, пытаются выровняться с магнитным полем статора. Поскольку магнитное поле статора вращается с синхронной скоростью, ротор также начинает вращаться с синхронной скоростью из-за магнитной блокировки между магнитным полем статора и ротора.
Следует отметить, что ротор в основном представляет собой короткозамкнутый ротор, как в асинхронном двигателе. Но тогда как в синхронном двигателе ротор имеет явно выраженный полюс цилиндрической конструкции. Когда обмотка ротора пересекается магнитным полем статора, они также создают вращающееся магнитное поле и, основываясь на принципе сопротивления, пытаются выровняться с магнитным полем статора. Поскольку магнитное поле статора вращается с синхронной скоростью, ротор также начинает вращаться с синхронной скоростью из-за магнитной блокировки между магнитным полем статора и ротора.
Перейдите по этой ссылке, чтобы узнать больше о синхронных двигателях MCQ
Векторная диаграмма
Одной из важных характеристик синхронного реактивного двигателя является его постоянная скорость. В начале, если ротор не выровнен с магнитным полем статора, в этом случае в дело вступает демпферная обмотка. Они также используются в синхронных двигателях. Демпфирующие обмотки, размещенные в полюсных башмаках, создают демпфирующий момент из-за относительной разницы скоростей между магнитным полем ротора и магнитным полем статора.
Векторная диаграмма
Это происходит, когда ротор не выровнен со статором. Создаваемый демпфирующий момент, согласно закону Ленца, пытается противодействовать причине его возникновения, которая заключается в разнице скоростей магнитного поля ротора и статора. Следовательно, демпфирующий момент толкает обмотку ротора так, что она магнитно блокируется магнитным полем статора. И после этого оставшееся время ротор работает на синхронной скорости. Векторная диаграмма синхронного реактивного двигателя показан выше. Ось q и ось d определены на основе двухосевой теории синхронной машины. Точно так же мы можем определить Vd и Vq, которые являются напряжением по осям d и q. Гамма – это угол между осью d и током статора Is. Это также определяется как угол ротора. Создаваемый синхронный крутящий момент является функцией угла ротора.
Конструкция
Конструктивные особенности в основном включают обмотки статора и ротора. Обмотка статора по своей природе трехфазная. Это означает, что они соединены звездой или треугольником. Причина этого в том, что когда они возбуждаются трехфазным питанием, они должны создавать вращающееся магнитное поле. Обмотка статора изготовлена из штамповок из кремнистой стали.
Это означает, что они соединены звездой или треугольником. Причина этого в том, что когда они возбуждаются трехфазным питанием, они должны создавать вращающееся магнитное поле. Обмотка статора изготовлена из штамповок из кремнистой стали.
Конструкция синхронного двигателя
Обмотки ротора изготовлены из ферромагнитного материала. Причина этого в том, что ротор должен совпадать с магнитным материалом статора в соответствии с принципом сопротивления, поэтому сопротивление обмоток ротора должно быть минимальным. Как показано на рисунке, обмотки якоря размещены на статоре, а обмотка возбуждения размещена на роторе. Это полная противоположность генератору постоянного тока. Причина в основном в проблемах с изоляцией, а поскольку обмотки якоря несут токи якоря, лучше держать их статичными. Обмотка статора возбуждается трехфазным питанием, как показано на рисунке. В низкомощных машинах для обмотки ротора используются постоянные магниты. Им не нужно отдельное возбуждение.
Синхронный реактивный двигатель, работающий
Когда обмотки статора возбуждаются трехфазным питанием, они создают вращающееся магнитное поле в обмотках статора. Магнитное поле вращается с синхронной скоростью в зависимости от количества полюсов и частоты. Фундаментальной концепцией реактивного двигателя является принцип реактивного сопротивления. Обмотки ротора имеют форму короткозамкнутого ротора, как и в асинхронном двигателе. Когда обмотки ротора возбуждаются постоянным током, они создают магнитное поле на обмотках ротора. Теперь у нас есть два магнитных поля, одно — магнитное поле статора, а другое — магнитное поле ротора. Магнитное поле статора вращается со скоростью синхронной скорости.
Магнитное поле вращается с синхронной скоростью в зависимости от количества полюсов и частоты. Фундаментальной концепцией реактивного двигателя является принцип реактивного сопротивления. Обмотки ротора имеют форму короткозамкнутого ротора, как и в асинхронном двигателе. Когда обмотки ротора возбуждаются постоянным током, они создают магнитное поле на обмотках ротора. Теперь у нас есть два магнитных поля, одно — магнитное поле статора, а другое — магнитное поле ротора. Магнитное поле статора вращается со скоростью синхронной скорости.
Теперь обмотки ротора сконструированы таким образом, что, когда магнитное поле статора пытается выровняться с магнитным полем ротора, оно образует путь с минимальным сопротивлением. Для этого пути с минимальным сопротивлением ротор пытается выровняться с магнитным полем статора, и в этом процессе он магнитно блокируется магнитным полем статора. Если магнитное поле статора вращается с синхронной скоростью, ротор также вращается с синхронной скоростью.
При любых перегрузках ротор выходит из магнитной блокировки. Ось ротора выходит из синхронизма. Затем сразу же возникает демпфирующий момент в обмотках демпфера. Демпферные обмотки пытаются вернуть ротор в магнитное запирание. Это явление называется охотой. Что является более доминирующим в синхронном двигателе. Машина пытается найти синхронное состояние. Как только ротор возвращается к магнитной блокировке, демпфирующий или синхронизирующий момент исчезает. То же самое можно сделать и для недогрузок.
Преимущества и недостатки
Благодаря своей надежности преимущества и недостатки синхронного реактивного двигателя включают следующее.
Преимущества:
- Благодаря концепции магнитной блокировки машина способна обеспечивать постоянную скорость при любых обстоятельствах. Любое изменение нагрузки, такое как недогрузка или перегрузка, будет компенсировано синхронизацией крутящего момента. Скорость будет сохранена во всех отношениях.
- Благодаря принципу нежелания ему не нужен какой-либо метод пуска, как в синхронном двигателе, которому нужны методы пуска, а не самозапуск.
- Автоматический запуск машины делает ее более надежной.
- Благодаря менее сложной конструкции требует меньше обслуживания.
- Нет пульсаций крутящего момента, как в вентильно-индукторном двигателе.

Недостатки:
- Самым большим недостатком двигателя является то, что из-за применения постоянной скорости невозможно регулирование скорости. Так как скорость не может быть изменена.
- Из-за необходимости наличия магнитных полей как статора, так и ротора, машина также известна как машина с двойным возбуждением. Нам нужны два возбуждения, одно для статора, другое для ротора.
- Из-за наличия трехфазных обмоток потери в меди больше, чем у двигателя постоянного тока.
Применение
Применение синхронного реактивного двигателя включает следующее.
В основном двигатели используются в промышленности из-за их свойства регулирования скорости. Но поскольку синхронный реактивный двигатель имеет постоянную скорость и регулирование скорости невозможно, он имеет очень мало применений.